
Multi-Robot Robust Motion Planning based on Model Predictive Priority Contouring Control with Double-Layer Corridors


Abstract
:Featured Application
Abstract
1. Introduction
- The construction method of double-layer corridors is devised, and the chance constraints introduced by disturbances are transformed into linear deterministic safety constraints.
- Model predictive priority contouring control with the double-layer corridors is proposed to generate multi-robot trajectories, which ensures security while greatly improving computational efficiency.
- Extensive evaluation of the method through a great number of simulations.
2. Problem Statement of Multi-Robot Robust Motion Planning
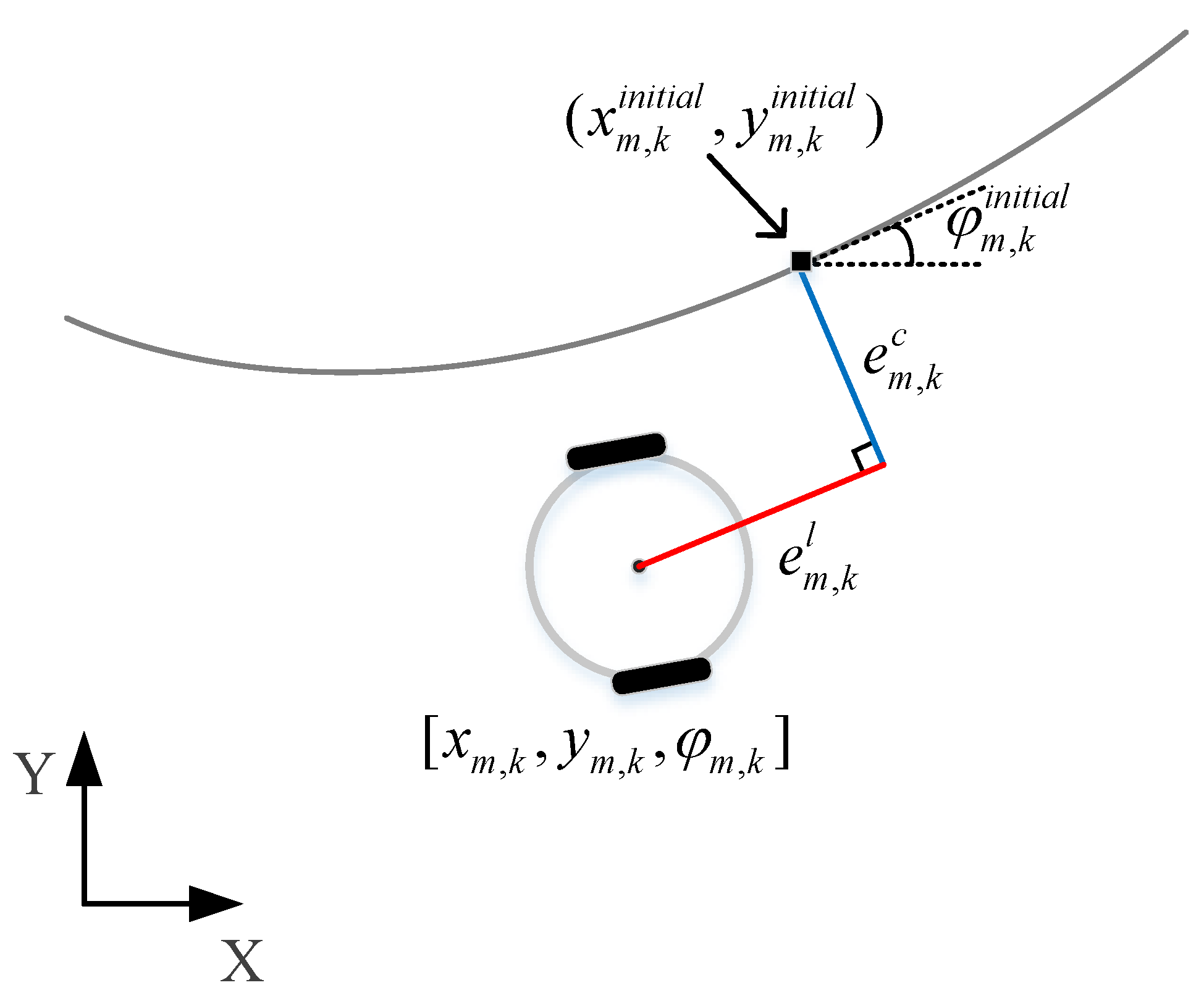
2.1. Robot Model
2.2. Collision Avoidance
2.3. Multi-Robot Robust Motion Planning Problem
3. Double-Layer Corridor
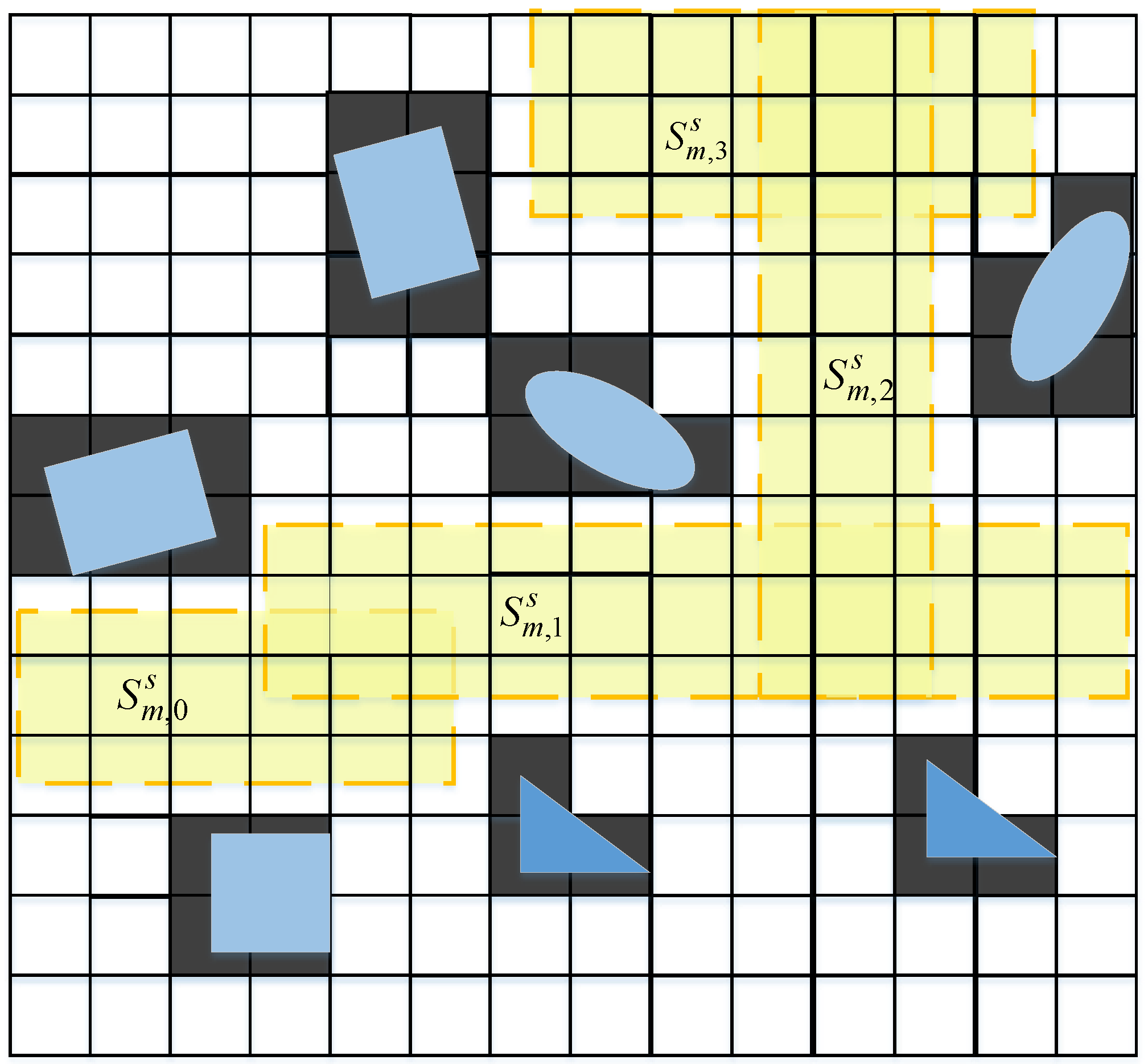
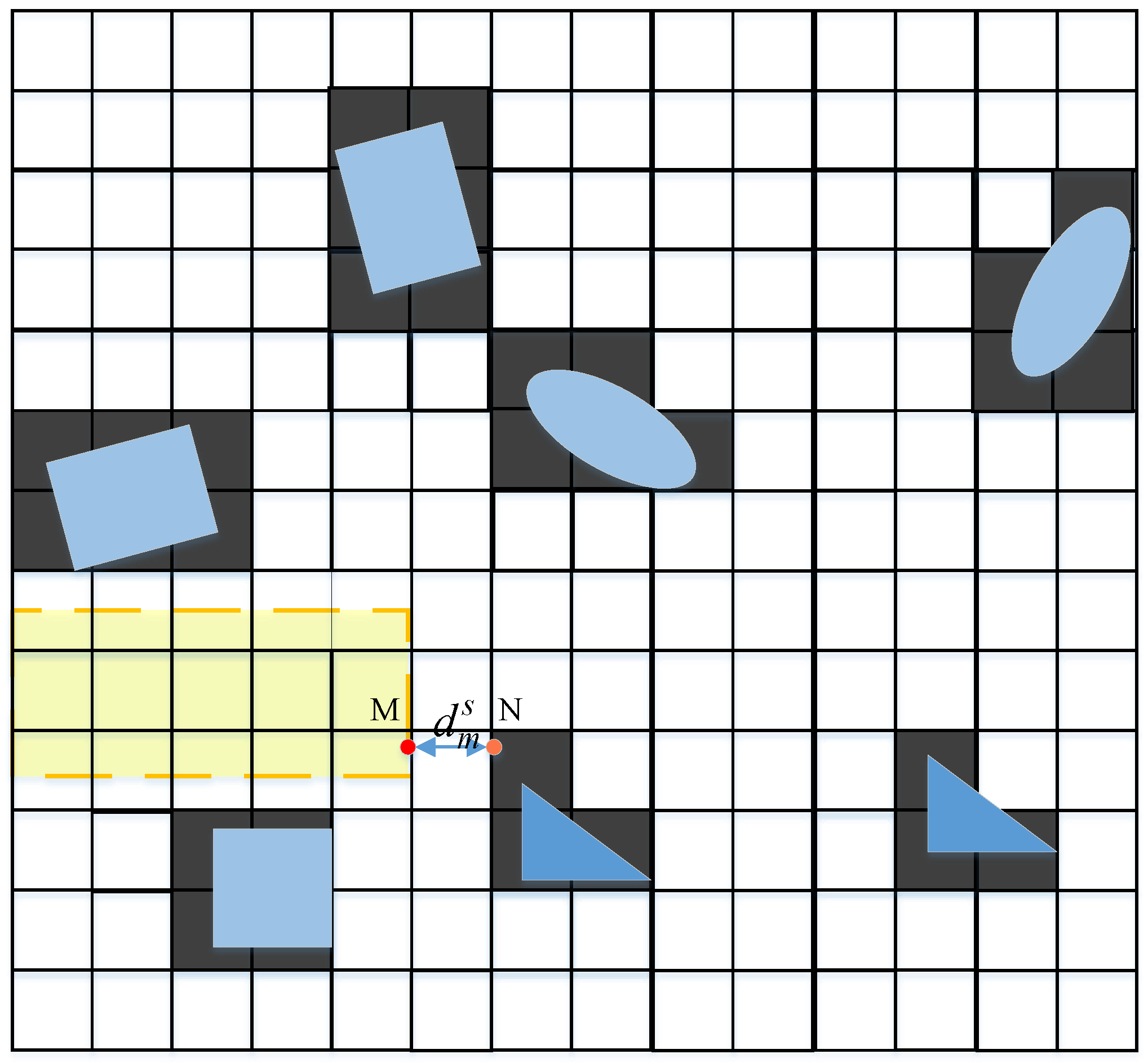
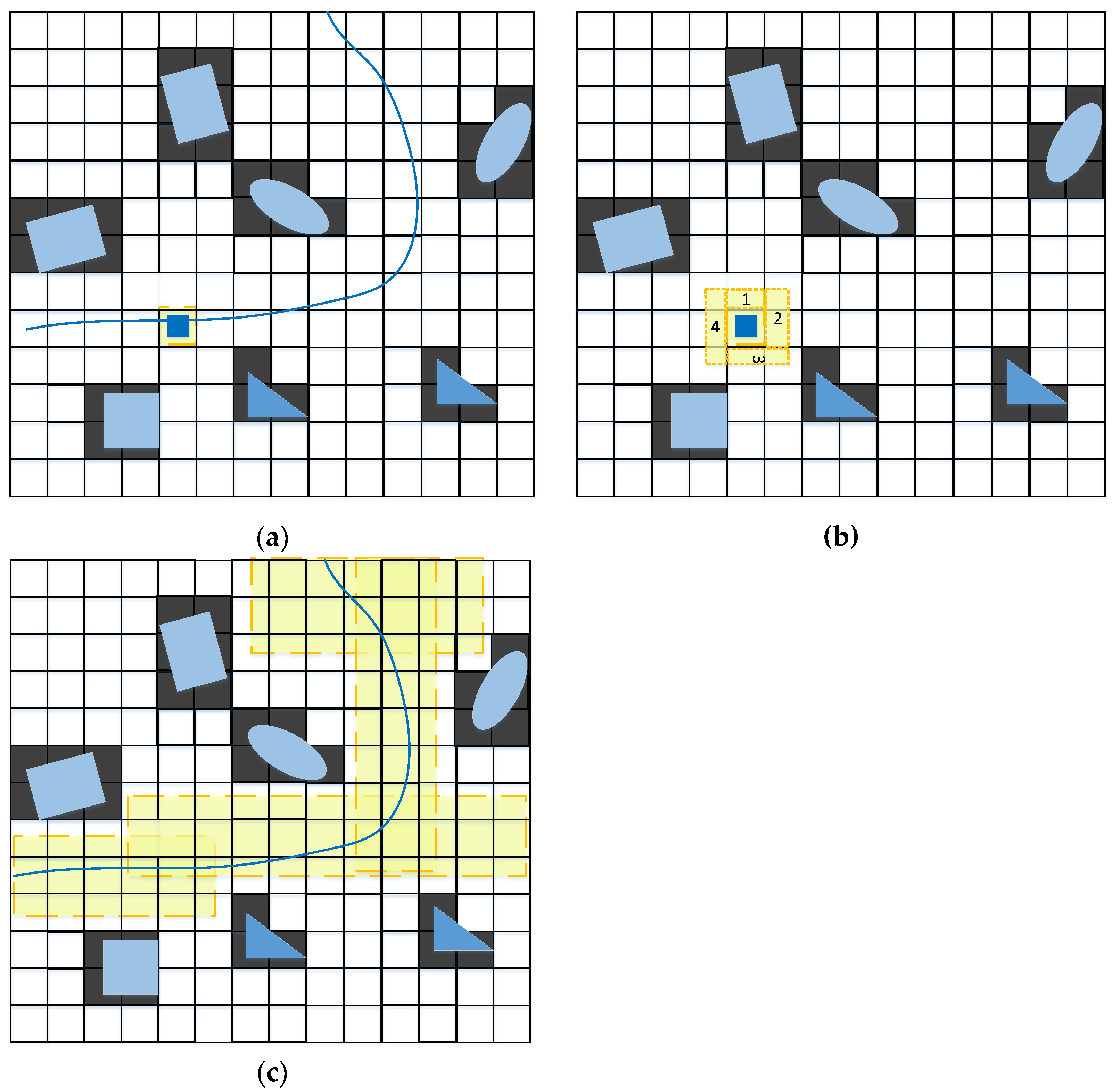
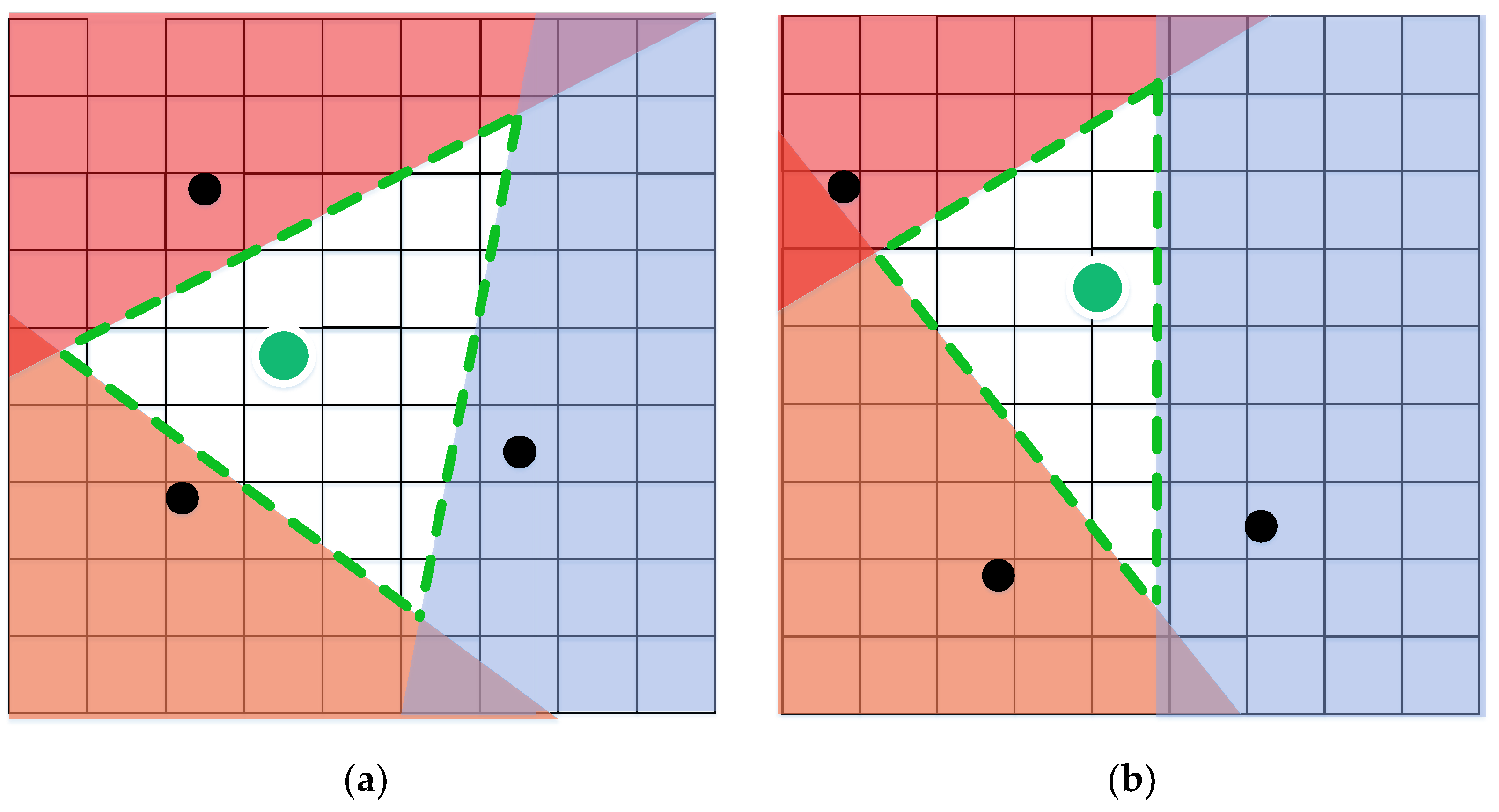
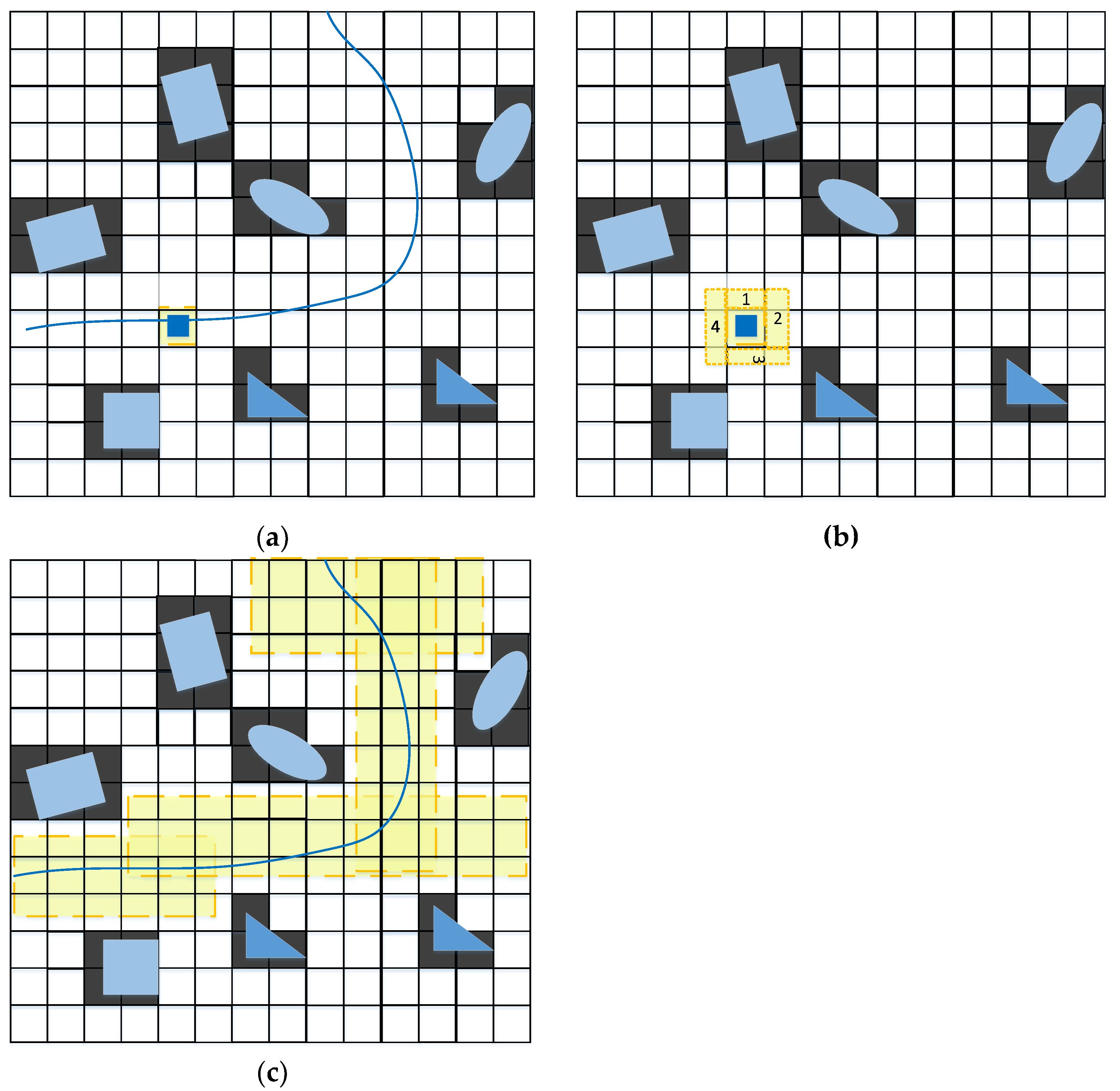
3.1. Static-Layer Corridor
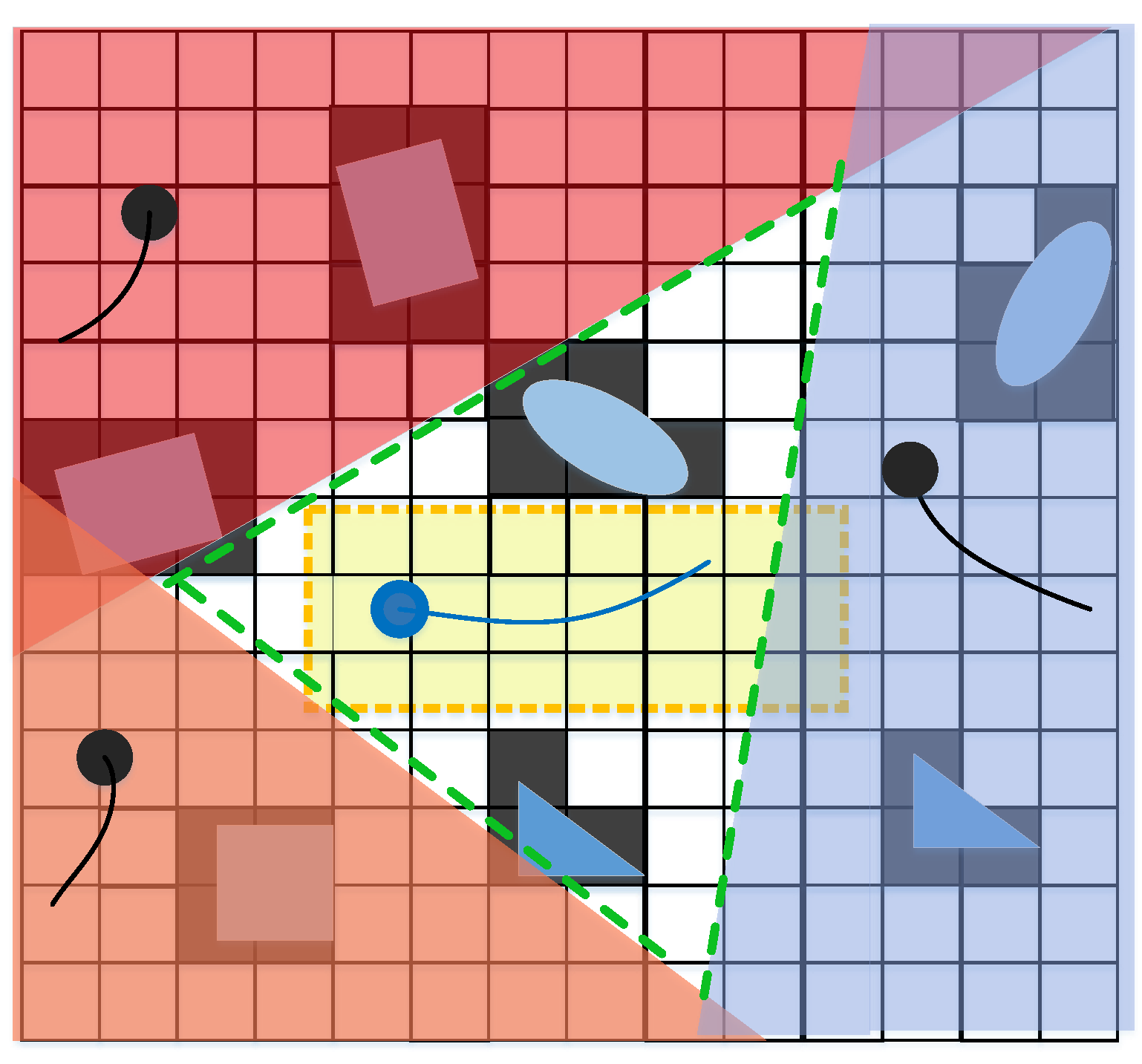
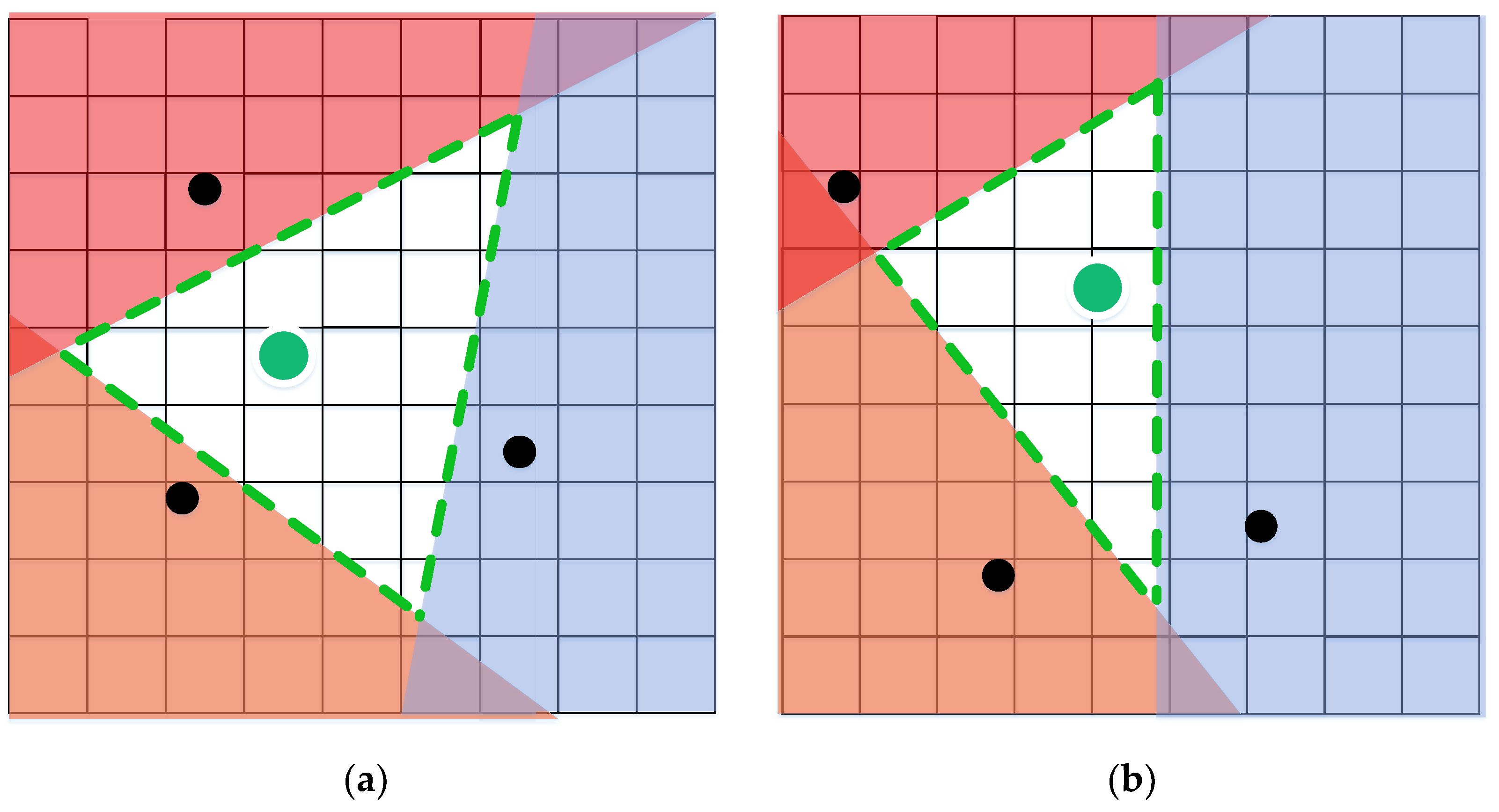
3.2. Dynamic-Layer Corridor
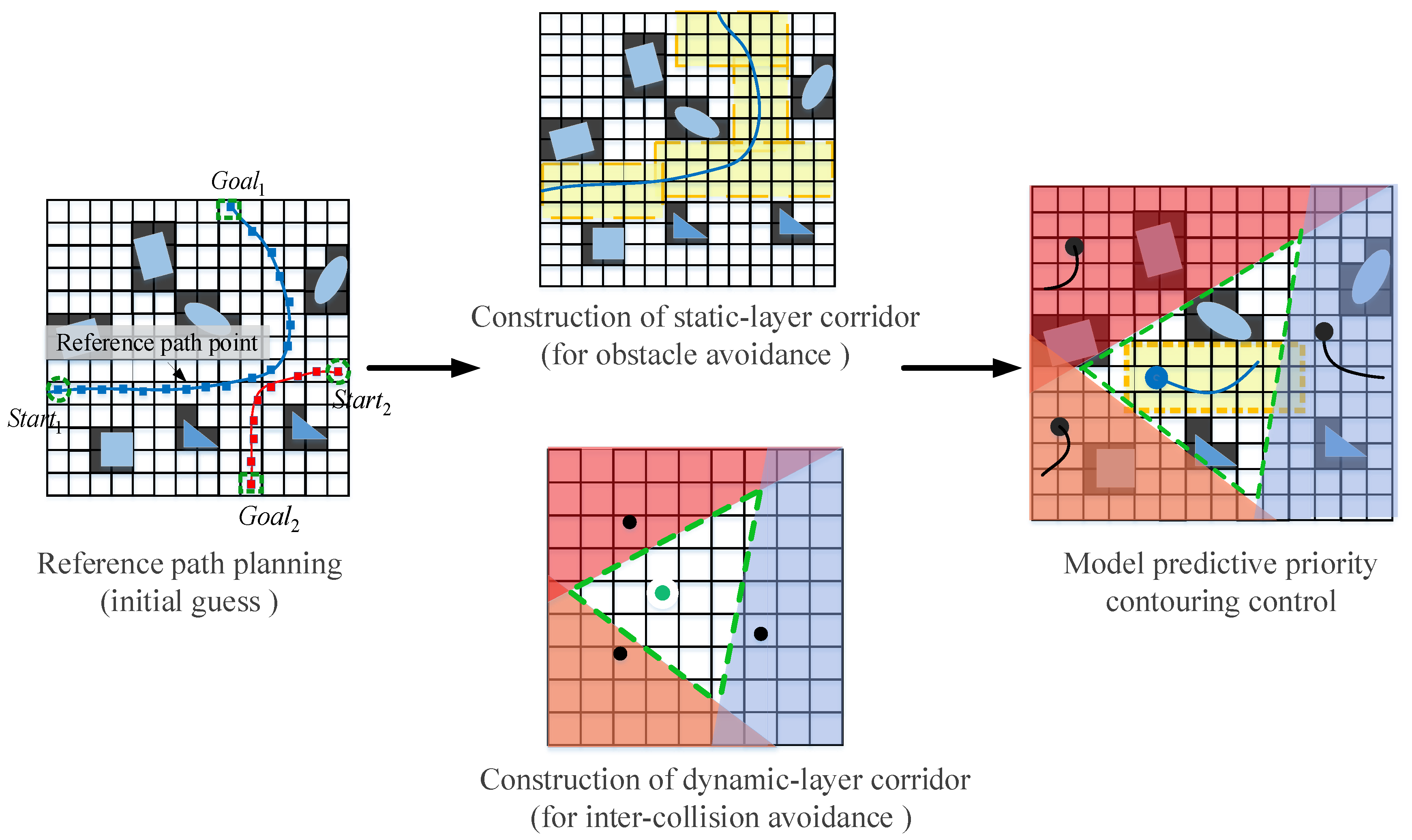
4. Model Predictive Priority Contouring Control with Double-Layer Corridors
4.1. Reference Path Planning
4.2. Construction of Double-Layer Corridor
4.2.1. Construction of Static-Layer Corridor
4.2.2. Construction of Dynamic-Layer Corridor
4.3. Model Predictive Priority Contouring Control
4.3.1. Initial Guess
4.3.2. Constraints
4.3.3. Cost Function
4.3.4. Prioritization Mechanism
| Algorithm 1: Model Predictive Priority Contouring Control. |
| Initial guess preprocessing; InitializePrank While not all robots reach the goal While Prank ≠ φ Select S robots with the highest priority in Prank; Solve (36) composed of these S robots Remove those S robots from Prank foreach robot Calculate the percentage of the uncompleted tasks Pm; Append Pm to Prank end Sort Prank end end |
5. Simulation Analysis
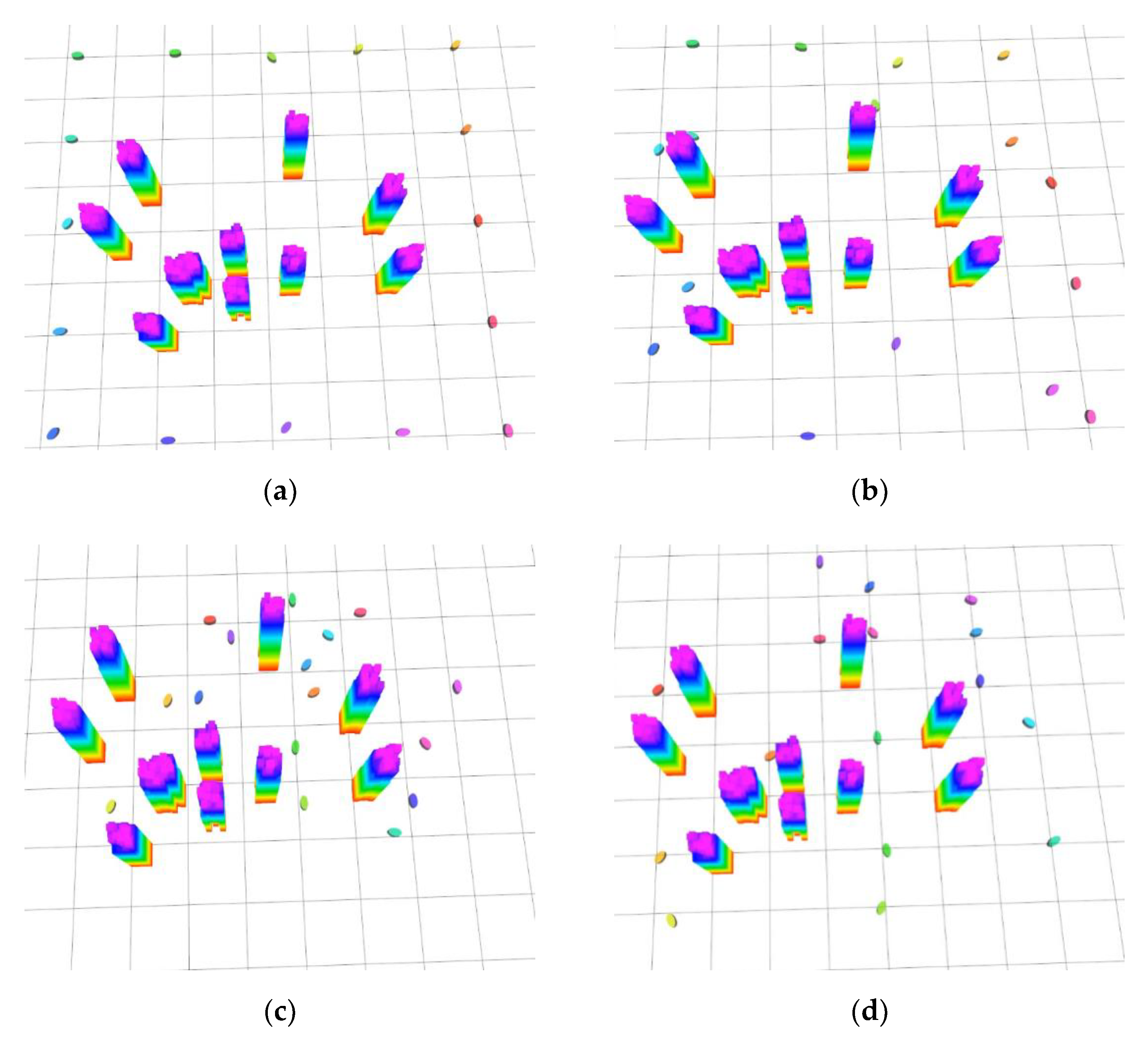
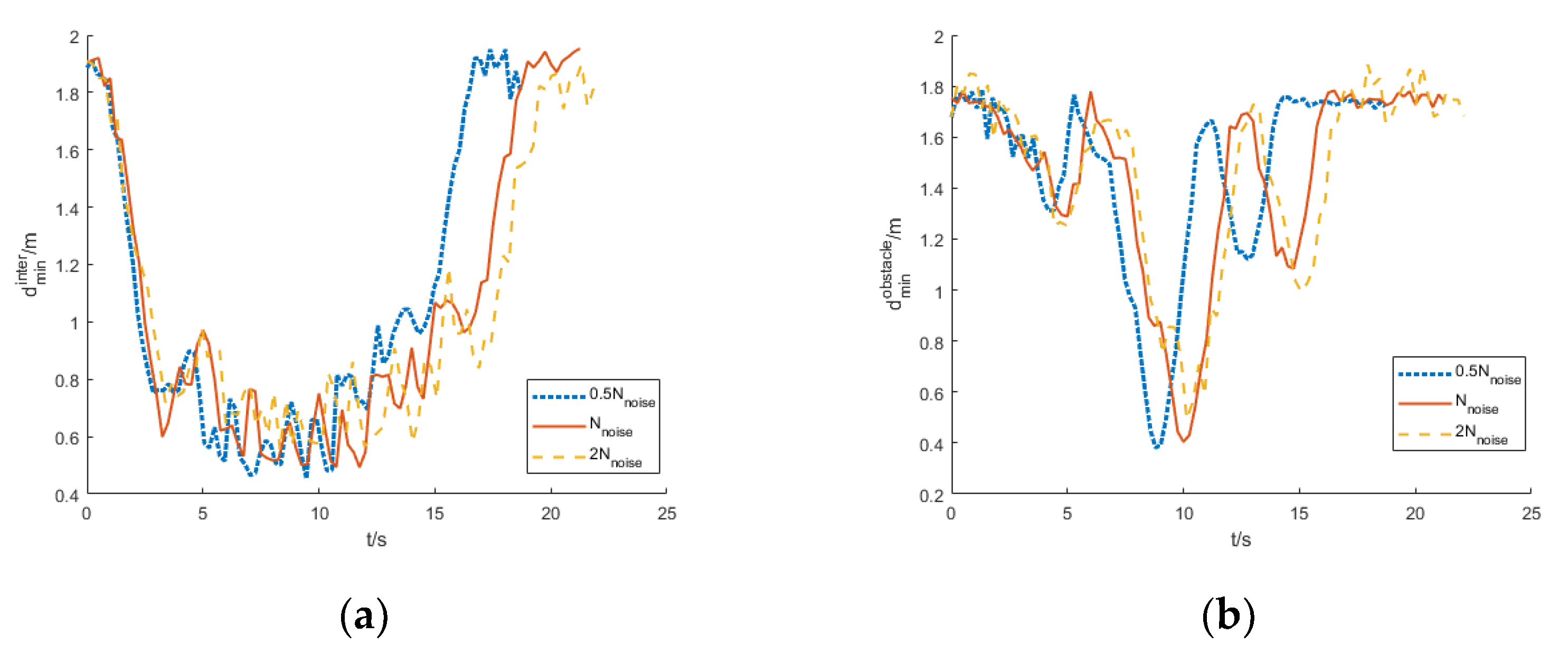
5.1. Simulation under Different Level Disturbances
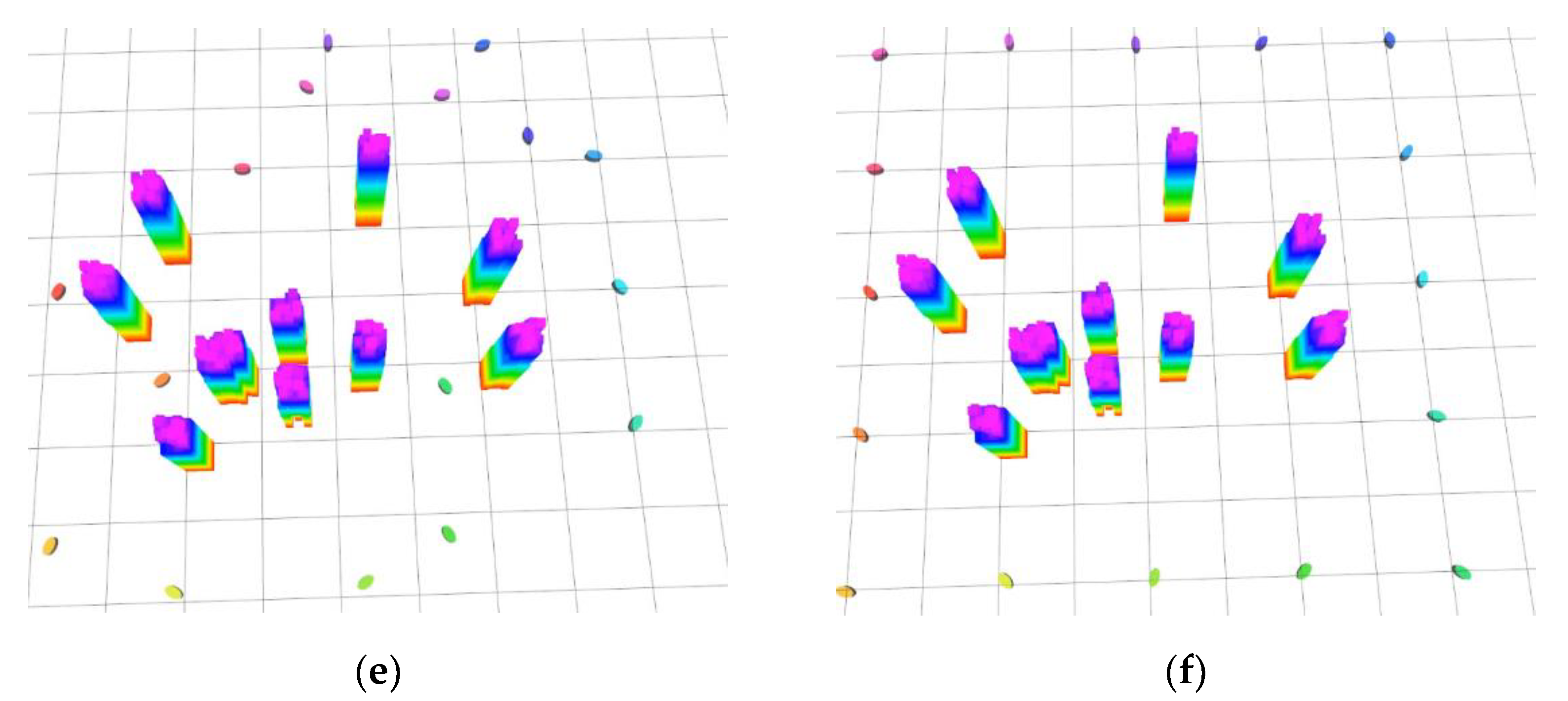
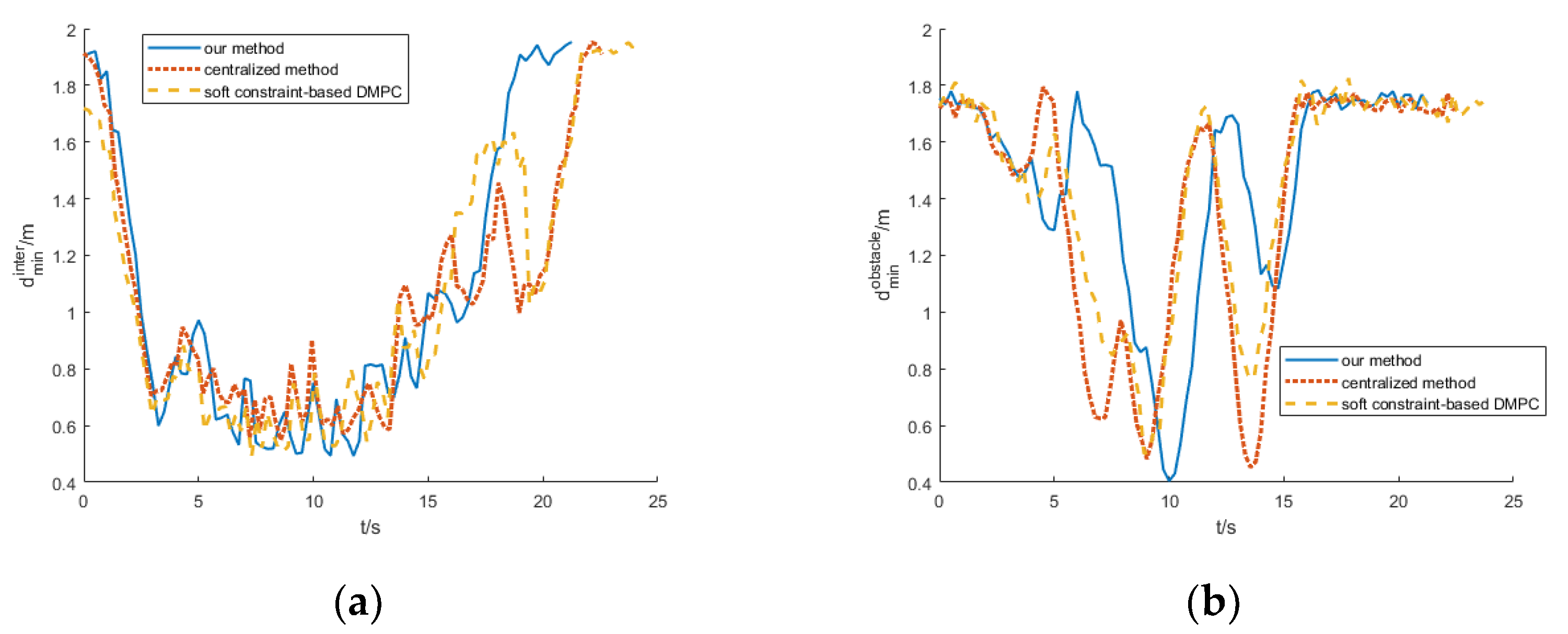
5.2. Method Comparison and Analysis
5.3. Computational Time Consumption Comparison and Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chatziparaschis, D.; Michail, G.L.; Partsinevelos, P. Aerial and Ground Robot Collaboration for Autonomous Mapping in Search and Rescue Missions. Drones 2020, 4, 79. [Google Scholar] [CrossRef]
- Choudhury, S.; Gupta, J.K.; Kochenderfer, M.J.; Sadigh, D.; Bohg, J. Dynamic multi-robot task allocation under uncertainty and temporal constraints. Auton. Robot. 2021, 1–17. [Google Scholar] [CrossRef]
- Madridano, Á.; Al-Kaff, A.; Martín, D.; de la Escalera, A. Trajectory planning for multi-robot systems: Methods and applications. Expert Syst. Appl. 2021, 173, 114660. [Google Scholar] [CrossRef]
- Luis, C.E.; Marijan, V.; Schoellig, A.P. Online trajectory generation with distributed model predictive control for multi-robot motion planning. IEEE Robot. Autom. Lett. 2020, 5, 604–611. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Ouyang, Y.; Zhang, Y.; Acarman, T.; Kong, Q.; Shao, Z. Optimal Cooperative Maneuver Planning for Multiple Nonholonomic Robots in a Tiny Environment via Adaptive-Scaling Constrained Optimization. IEEE Robot. Autom. Lett. 2021, 6, 1511–1518. [Google Scholar] [CrossRef]
- Li, B.; Liu, H.; Xiao, D.; Yu, G.; Zhang, Y. Centralized and optimal motion planning for large-scale AGV systems: A generic approach. Adv. Eng. Softw. 2017, 106, 33–46. [Google Scholar] [CrossRef]
- Sharon, G.; Stern, R.; Felner, A.; Sturtevant, N.R. Conflict-based search for optimal multi-agent pathfinding. Artif. Intell. 2015, 219, 40–66. [Google Scholar] [CrossRef]
- Li, J.; Ruml, W.; Koenig, S. EECBS: A Bounded-Suboptimal Search for Multi-Agent Path Finding. In Proceedings of the 35th AAAI Conference on Artificial Intelligence (AAAI), Online, 2–9 February 2021. [Google Scholar]
- Hönig, W.; Preiss, J.A.; Kumar, T.S.; Sukhatme, G.S.; Ayanian, N. Trajectory planning for quadrotor swarms. IEEE Trans. Robot. 2018, 34, 856–869. [Google Scholar] [CrossRef]
- Debord, M.; Hönig, W.; Ayanian, N. Trajectory planning for heterogeneous robot teams. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018. [Google Scholar]
- Li, J.; Ran, M.; Xie, L. Efficient trajectory planning for multiple non-holonomic mobile robots via prioritized trajectory optimization. IEEE Robot. Autom. Lett. 2021, 6, 405–412. [Google Scholar] [CrossRef]
- Wilkie, D.; van den Berg, J.; Manocha, D. Generalized velocity obstacles. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009. [Google Scholar]
- Van den Berg, J.; Lin, M.; Manocha, D. Reciprocal velocity obstacles for real-time multi-agent navigation. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, NL, Canada, 19–23 May 2008. [Google Scholar]
- Snape, J.; Van Den Berg, J.; Guy, S.J.; Manocha, D. The hybrid reciprocal velocity obstacle. IEEE Trans. Robot. 2018, 27, 696–706. [Google Scholar] [CrossRef] [Green Version]
- Alonso-Mora, J.; Breitenmoser, A.; Rufli, M.; Beardsley, P.; Siegwart, R. Optimal Reciprocal Collision Avoidance for Multiple Non-Holonomic Robots. In Proceedings of the 10th International Symposium on Distributed Autonomous Robotic Systems, Ecole Polytechn Fed, Lausanne, Lausanne, Switzerland, 1–3 November 2011. [Google Scholar]
- Katriniok, A.; Sopasakis, P.; Schuurmans, M.; Patrinos, P. Nonlinear model predictive control for distributed motion planning in road intersections using PANOC. In Proceedings of the 2019 IEEE 58th Conference on Decision and Control (CDC), Nice, France, 11–13 December 2019. [Google Scholar]
- Luis, C.E.; Schoellig, A.P. Trajectory generation for multiagent point-to-point transitions via distributed model predictive control. IEEE Robot. Autom. Lett. 2019, 4, 375–382. [Google Scholar] [CrossRef] [Green Version]
- Bharath, G.; Singh, A.K.; Kaushik, M.; Krishna, K.M.; Manocha, D. Chance constraint based multi agent navigation under uncertainty. In Proceedings of the Advances in Robotics (AIR 2017), New Delhi, India, 28 June–2 July 2017. [Google Scholar]
- Zhou, L.; Tokekar, P. Multi-robot coordination and planning in uncertain and adversarial environments. Curr. Robot. Rep. 2021, 2, 147–157. [Google Scholar] [CrossRef]
- Ono, M.; Williams, B.C.; Blackmore, L. Probabilistic planning for continuous dynamic systems under bounded risk. J. Artif. Intell. Res. 2013, 46, 511–577. [Google Scholar] [CrossRef]
- Luo, W.; Sun, W.; Kapoor, A. Multi-Robot Collision Avoidance under Uncertainty with Probabilistic Safety Barrier Certificates. In Proceedings of the Advances in Neural Information Processing Systems (NeurIPS 2020), Online, 6–12 December 2020. [Google Scholar]
- Bharath, G.; Singh, A.K.; Kaushik, M.; Krishna, K.M.; Manocha, D. Prvo: Probabilistic reciprocal velocity obstacle for multi robot navigation under uncertainty. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar]
- Lew, T.; Bonalli, R.; Pavone, M. Chance-constrained sequential convex programming for robust trajectory optimization. In Proceedings of the 2020 European Control Conference (ECC), St. Petersburg, Russia, 12–15 May 2020. [Google Scholar]
- Maide, B.; Buscarino, A.; Famoso, C.; Fortuna, L.; Frasca, M. Control of imperfect dynamical systems. Nonlinear Dyn. 2019, 98, 2989–2999. [Google Scholar]
- Zhu, H.; Alonso-Mora, J. Chance-constrained collision avoidance for mavs in dynamic environments. IEEE Robot. Autom. Lett. 2019, 4, 776–783. [Google Scholar] [CrossRef]
- Park, J.; Kim, H.J. Online Trajectory Planning for Multiple Quadrotors in Dynamic Environments Using Relative Safe Flight Corridor. IEEE Robot. Autom. Lett. 2020, 6, 659–666. [Google Scholar] [CrossRef]
- Brito, B.; Floor, B.; Ferranti, L.; Alonso-Mora, J. Model predictive contouring control for collision avoidance in unstructured dynamic environments. IEEE Robot. Autom. Lett. 2019, 4, 4459–4466. [Google Scholar] [CrossRef]
- Ferreau, H.J.; Kirches, C.; Potschka, A.; Bock, H.G.; Diehl, M. qpOASES: A parametric active-set algorithm for quadratic programming. Math. Program. Comput. 2014, 6, 327–363. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Start | Goal | ID | Start | Goal |
|---|---|---|---|---|---|
| 1 | (4,0) | (−4,0) | 9 | (−4,−2) | (4,2) |
| 2 | (4,2) | (−4,−2) | 10 | (−4,−4) | (4,4) |
| 3 | (4,4) | (−4,−4) | 11 | (−2,−4) | (2,4) |
| 4 | (0,4) | (0,−4) | 12 | (0,−4) | (0,4) |
| 5 | (−2,4) | (2,−4) | 13 | (2,−4) | (−2,4) |
| 6 | (−4,4) | (4,−4) | 14 | (4,−4) | (−4,4) |
| 7 | (−4,2) | (4,−2) | 15 | (2,4) | (−2,−4) |
| 8 | (−4,0) | (4,0) | 16 | (4,−2) | (−4,2) |
| Value of the Covariance Matrix | |||
|---|---|---|---|
| Minimum distance from obstacles | 0.38 m | 0.40 m | 0.49 m |
| Minimum distance between robots | 0.45 m | 0.50 m | 0.56 m |
| Task success rate | 100% | 100% | 100% |
| Average velocity | 0.50 m/s | 0.45 m/s | 0.44 m/s |
| Average standard deviation of velocity | 0.21 m/s | 0.20 m/s | 0.19 m/s |
| Task time | 18.70 s | 21.25 s | 22.10 s |
| Calculation time per horizon | 0.18 s | 0.20 s | 0.21 s |
| Method | Our Method | Centralized Method [6] | Soft Constraint-Based DMPC [17] |
|---|---|---|---|
| Minimum distance from obstacles | 0.40 m | 0.38 m | 0.40 m |
| Minimum distance between robots | 0.50 m | 0.51 m | 0.44 m |
| Task success rate | 100% | 100% | 93.3% |
| Average velocity | 0.45 m/s | 0.39 m/s | 0.36 m/s |
| Average standard deviation of velocity | 0.20 m/s | 0.15 m/s | 0.12 m/s |
| Task time | 21.25 s | 22.80 s | 24.20 s |
| Calculation time per horizon | 0.20 s | 1.05 s | 0.18 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, L.; Wang, Z. Multi-Robot Robust Motion Planning based on Model Predictive Priority Contouring Control with Double-Layer Corridors. Appl. Sci. 2022, 12, 1682. https://doi.org/10.3390/app12031682
Yu L, Wang Z. Multi-Robot Robust Motion Planning based on Model Predictive Priority Contouring Control with Double-Layer Corridors. Applied Sciences. 2022; 12(3):1682. https://doi.org/10.3390/app12031682
Chicago/Turabian StyleYu, Lingli, and Zhengjiu Wang. 2022. "Multi-Robot Robust Motion Planning based on Model Predictive Priority Contouring Control with Double-Layer Corridors" Applied Sciences 12, no. 3: 1682. https://doi.org/10.3390/app12031682
APA StyleYu, L., & Wang, Z. (2022). Multi-Robot Robust Motion Planning based on Model Predictive Priority Contouring Control with Double-Layer Corridors. Applied Sciences, 12(3), 1682. https://doi.org/10.3390/app12031682