
Human Activity Signatures Captured under Different Directions Using SISO and MIMO Radar Systems



Abstract
:1. Introduction
1.1. General Background
1.2. Related Work
1.3. Contributions
- A basic multi-perspective MIMO radar system is presented which can be easily scaled to a higher number of transmitter and receiver antennas for better performance.
- We analyze the TV radial velocity distribution and TV mean radial velocity for the proposed distributed antenna configuration.
- For the MIMO radar configuration, we investigate the impact of a human falling incident and a walking activity on the measured radial velocity distribution and measured mean radial velocity.
- We analyze the impact of two different activities performed in three different directions on the measured channel characteristics for a SISO and a MIMO radar system. We corroborate the limitations of the SISO radar system by analyzing the real radar data.
- We demonstrate the robustness of the proposed MIMO radar system against different directions of the actual human walking and falling activity. We show that the proposed solution is able to detect the human gross motor activity in the horizontal xy-plane.
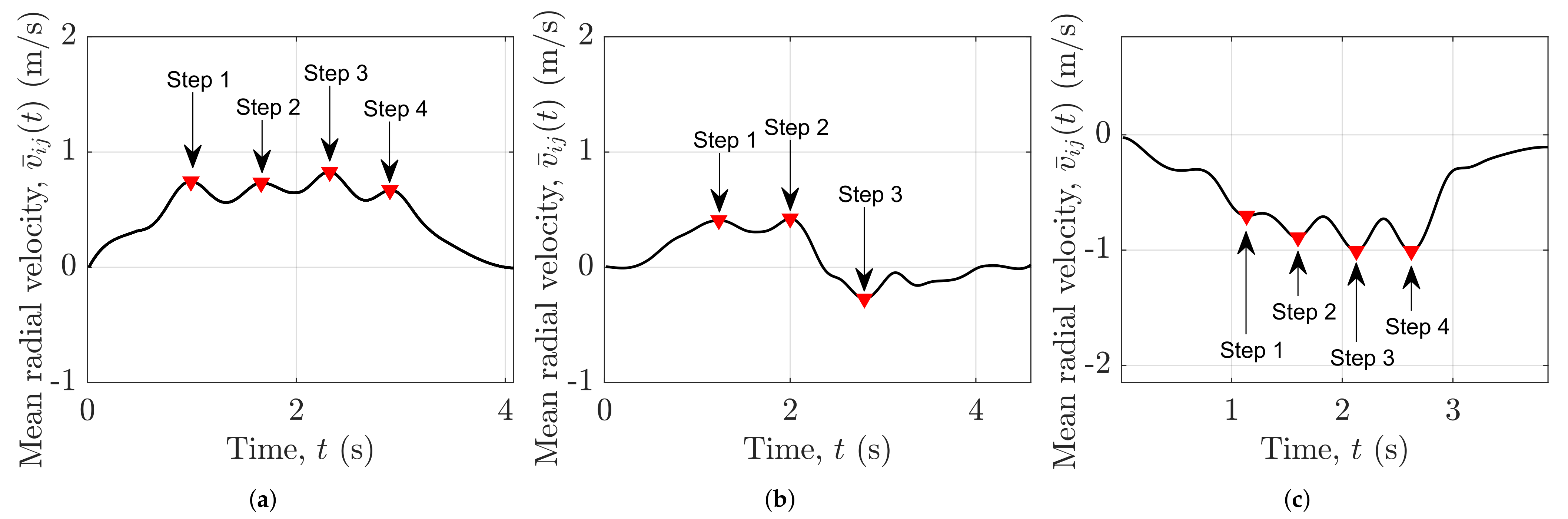
- We analyze the performance of a radar-based passive step counter by integrating it with a SISO radar system. It is shown that the radar-based passive step counter, when used with a SISO radar system, may miss some human walking steps or detect false steps depending on the walking direction.
- It is shown that by deploying the radar-based passive step counter with the proposed MIMO radar framework, the step counter would accurately detect the number of steps for all considered human walking directions.
- Finally, we quantify, compare, and numerically assess the performance of the SISO and MIMO radar systems by using the dynamic time warping (DTW) [44] distance metric.
1.4. Paper Organization
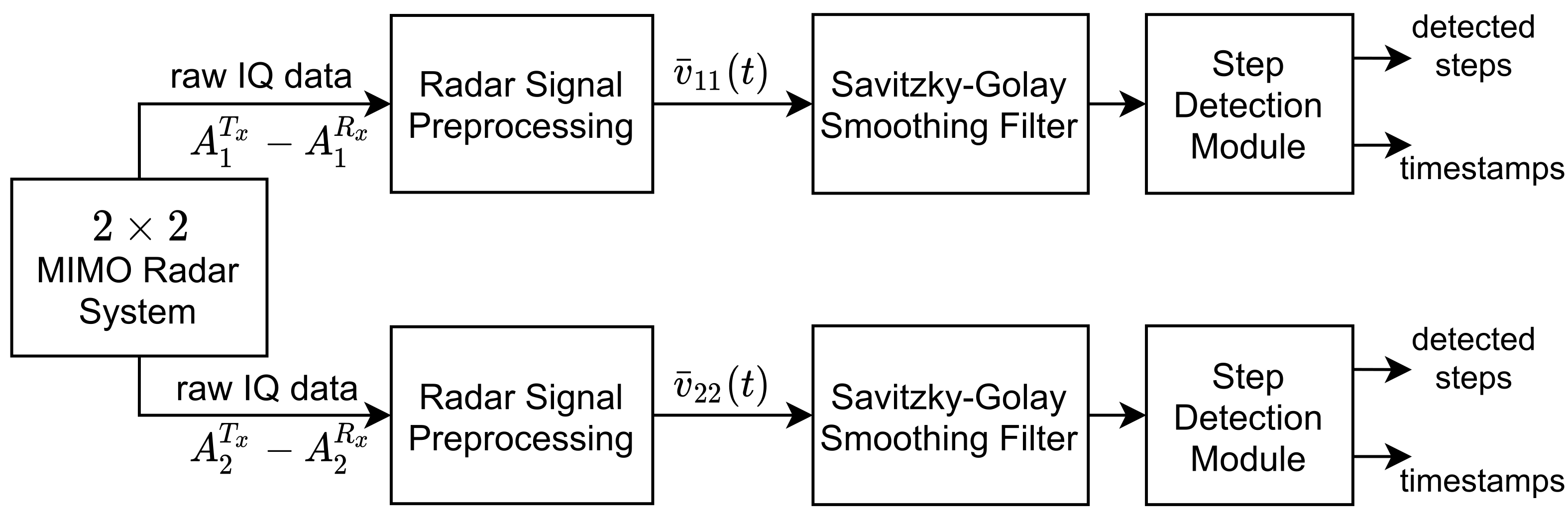
2. Radar Signal Preprocessing
3. Human Activity Signatures Measured by Using a SISO FMCW Radar System
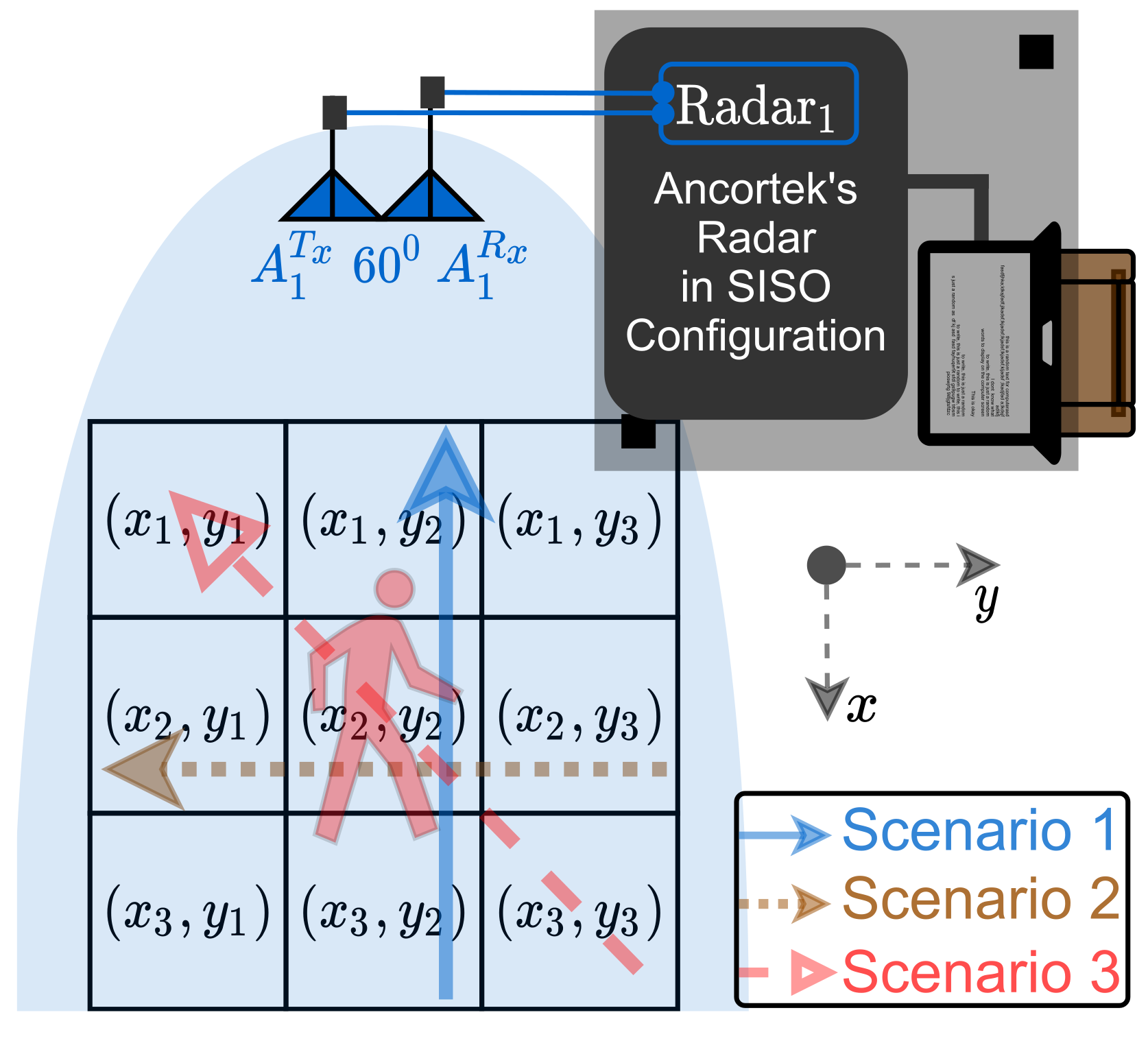
3.1. Measurement Setup
3.2. Scenarios of Human Activities
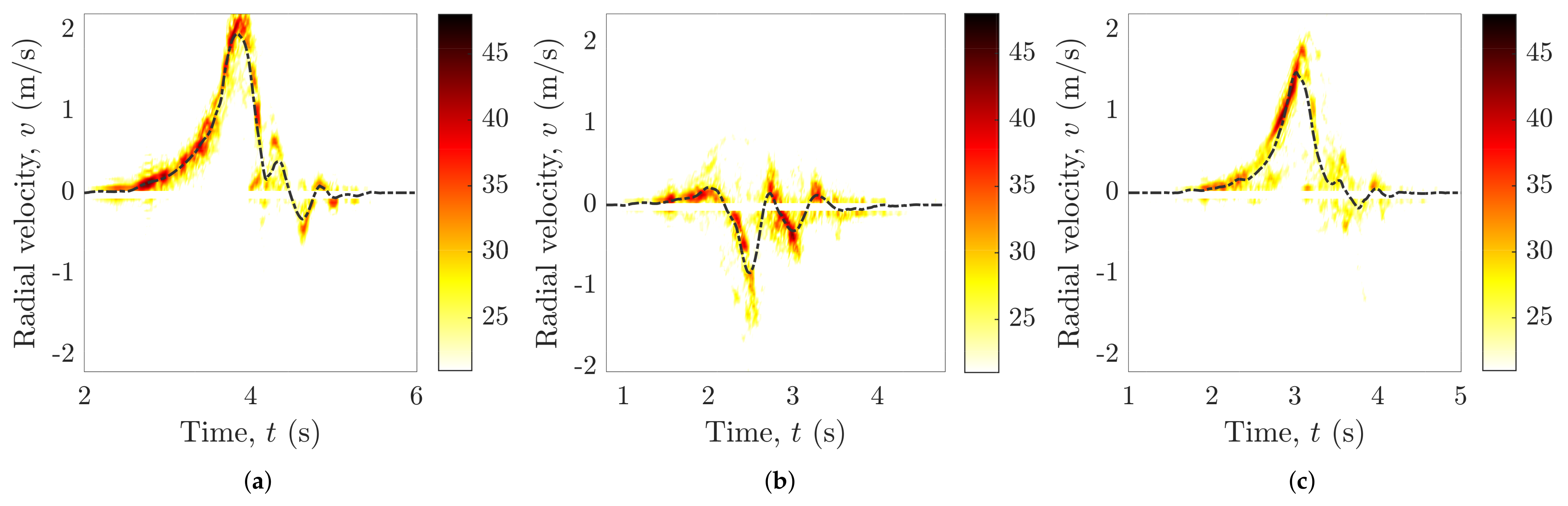
3.3. Results for the Monostatic SISO Configuration
3.4. Implications on the Performance of an RF-Based Step Counter
4. Human Activity Signatures by Using a Distributed MIMO FMCW Radar System
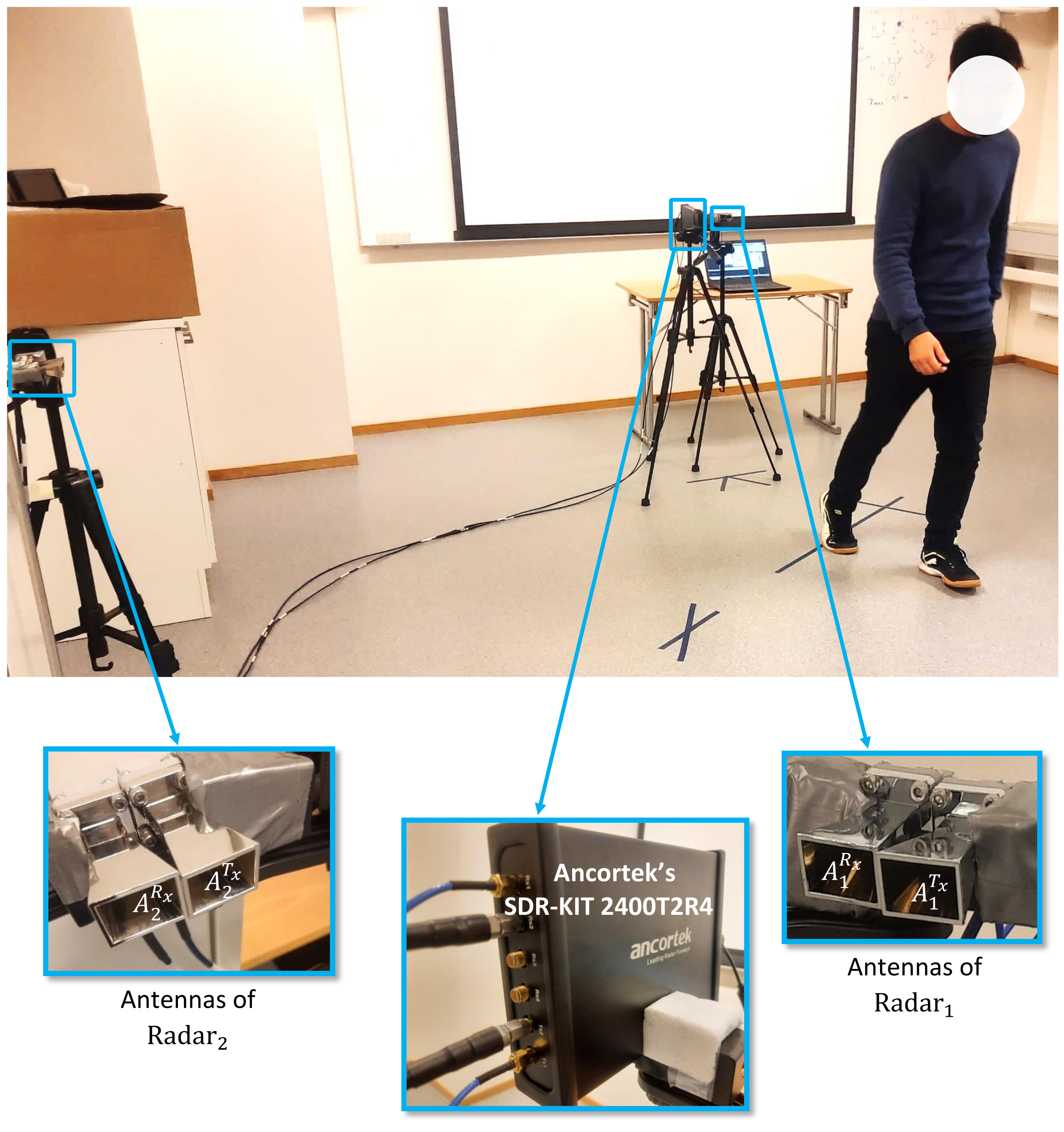
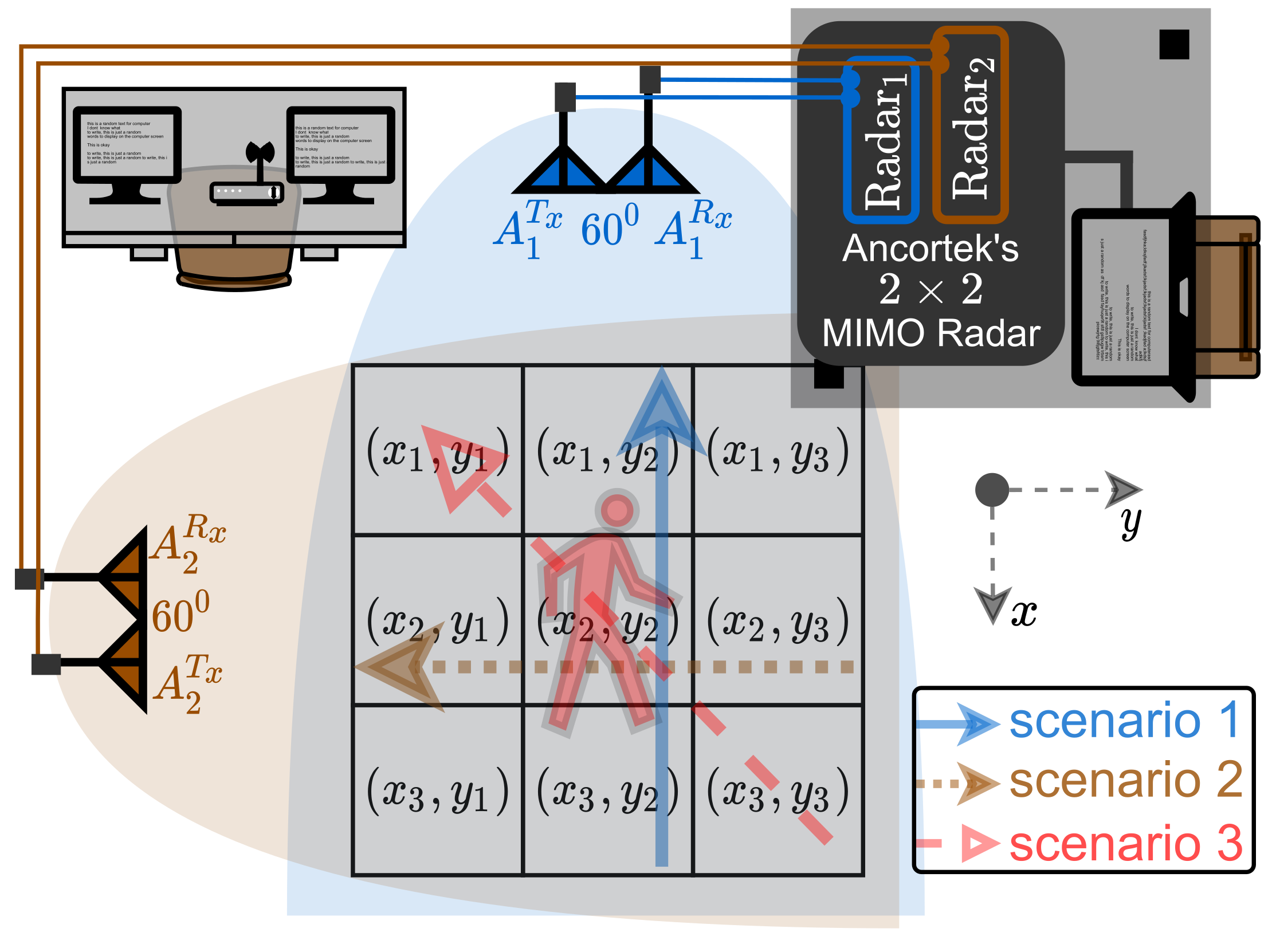
4.1. Measurement Setup
4.2. Scenarios of Human Activities
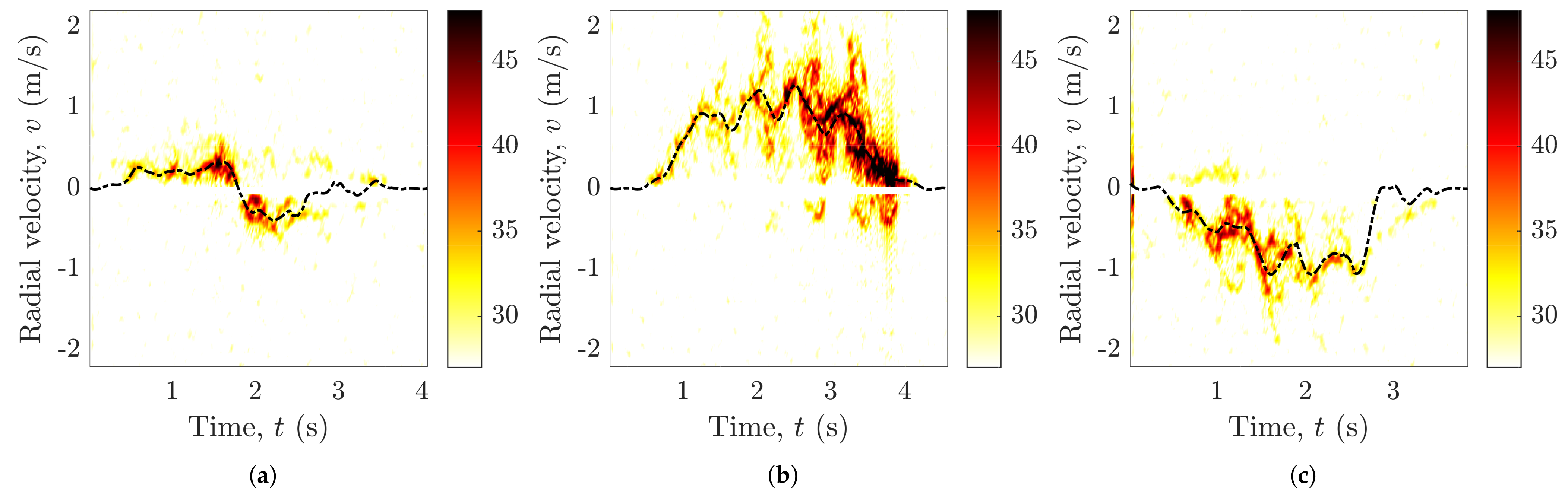
4.3. Results for the Proposed MIMO Configuration
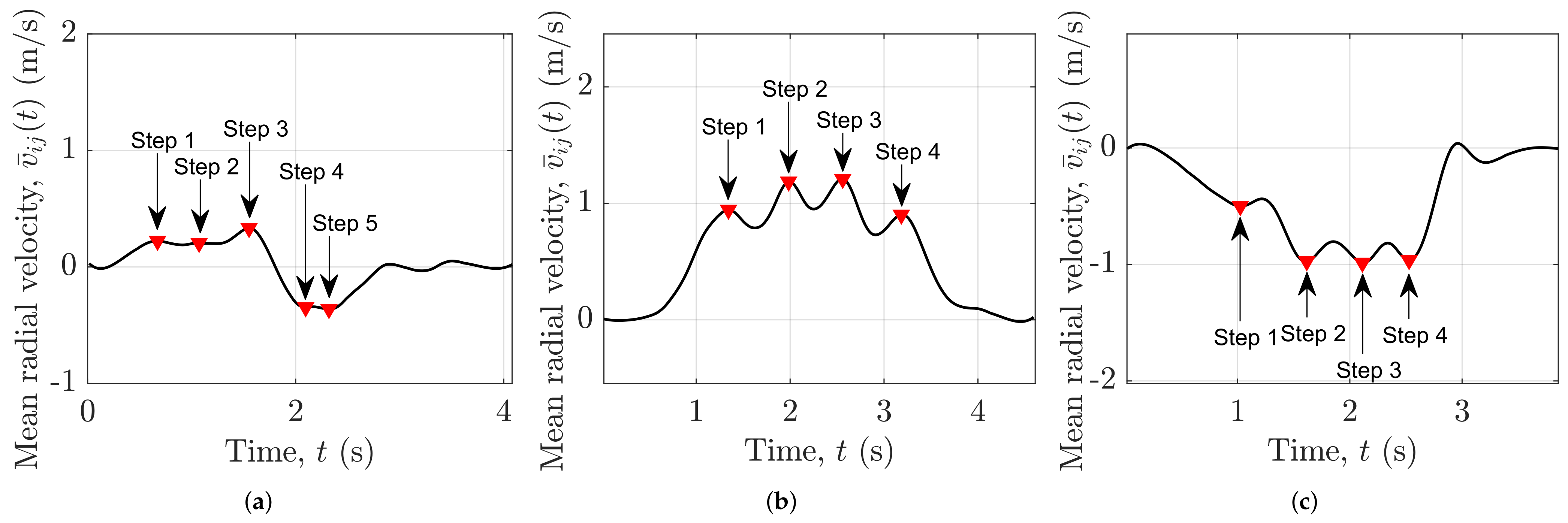
4.4. Implications on the Performance of an RF-Based Step Counter
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Al-khafajiy, M.; Baker, T.; Chalmers, C.; Asim, M.; Kolivand, H.; Fahim, M.; Waraich, A. Remote health monitoring of elderly through wearable sensors. Multimed. Tools Appl. 2019, 78, 24681–24706. [Google Scholar] [CrossRef] [Green Version]
- Kim, K.; Jalal, A.; Mahmood, M. Vision-based human activity recognition system using depth silhouettes: A smart home system for monitoring the residents. J. Electr. Eng. Technol. 2019, 14, 2567–2573. [Google Scholar] [CrossRef]
- Rashmi, M.; Ashwin, T.S.; Guddeti, R.M.R. Surveillance video analysis for student action recognition and localization inside computer laboratories of a smart campus. Multimed. Tools Appl. 2021, 80, 2907–2929. [Google Scholar] [CrossRef]
- Gurcan, F.; Cagiltay, N.E.; Cagiltay, K. Mapping human–computer interaction research themes and trends from its existence to today: A topic modeling-based review of past 60 years. Int. J. Hum.-Comput. Interact. 2021, 37, 267–280. [Google Scholar] [CrossRef]
- Tuncer, T.; Ertam, F.; Dogan, S.; Subasi, A. An automated daily sports activities and gender recognition method based on novel multikernel local diamond pattern using sensor signals. IEEE Trans. Instrum. Meas. 2020, 69, 9441–9448. [Google Scholar] [CrossRef]
- Tammvee, M.; Anbarjafari, G. Human activity recognition-based path planning for autonomous vehicles. Signal Image Video Process. 2021, 15, 809–816. [Google Scholar] [CrossRef]
- Rodriguez Lera, F.J.; Martín Rico, F.; Guerrero Higueras, A.M.; Olivera, V.M. A context-awareness model for activity recognition in robot-assisted scenarios. Expert Syst. 2020, 37, e12481. [Google Scholar] [CrossRef]
- Muaaz, M.; Chelli, A.; Pätzold, M. WiHAR: From Wi-Fi channel state information to unobtrusive human activity recognition. In Proceedings of the 2020 IEEE Vehicular Technology Conference, Antwerp, Belgium, 25–28 May 2020. [Google Scholar] [CrossRef]
- Muaaz, M.; Chelli, A.; Abdelgawwad, A.A.; Mallofre, A.C.; Pätzold, M. WiWeHAR: Multimodal human activity recognition using Wi-Fi and wearable sensing modalities. IEEE Access 2020, 8, 164453–164470. [Google Scholar] [CrossRef]
- Wang, W.; Liu, A.X.; Shahzad, M.; Ling, K.; Lu, S. Device-free human activity recognition using commercial WiFi devices. IEEE J. Sel. Areas Commun. 2017, 35, 1118–1131. [Google Scholar] [CrossRef]
- Erol, B.; Amin, M.G. Radar data cube processing for human activity recognition using multisubspace learning. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3617–3628. [Google Scholar] [CrossRef]
- Wang, W.; Liu, A.X.; Shahzad, M.; Ling, K.; Lu, S. Understanding and modeling of WiFi signal based human activity recognition. In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking, Paris, France, 7–11 September 2015; pp. 65–76. [Google Scholar]
- Wang, W.; Liu, A.X.; Shahzad, M. Gait recognition using WiFi signals. In Proceedings of the 2016 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Heidelberg, Germany, 12–16 September 2016; pp. 363–373. [Google Scholar]
- Ding, C.; Hong, H.; Zou, Y.; Chu, H.; Zhu, X.; Fioranelli, F.; Le Kernec, J.; Li, C. Continuous human motion recognition with a dynamic range-Doppler trajectory method based on FMCW radar. IEEE Trans. Geosci. Remote Sens. 2019, 57, 6821–6831. [Google Scholar] [CrossRef]
- Waqar, S.; Yusaf, H.; Sana, S.; Waqas, M.; Siddiqui, F.A. Reconfigurable monopulse radar tracking processor. In Proceedings of the 2018 15th International Bhurban Conference on Applied Sciences and Technology (IBCAST), Islamabad, Pakistan, 9–13 January 2018; pp. 805–809. [Google Scholar]
- Amin, M.G.; Zhang, Y.D.; Ahmad, F.; Ho, K.C.D. Radar signal processing for elderly fall detection: The future for in-home monitoring. IEEE Signal Process. Mag. 2016, 33, 71–80. [Google Scholar] [CrossRef]
- Erol, B.; Amin, M.G.; Boashash, B. Range-Doppler radar sensor fusion for fall detection. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 819–824. [Google Scholar]
- Fioranelli, F.; Ritchie, M.; Griffiths, H. Aspect angle dependence and multistatic data fusion for micro-Doppler classification of armed/unarmed personnel. IET Radar Sonar Navig. 2015, 9, 1231–1239. [Google Scholar] [CrossRef] [Green Version]
- Louf, V.; Protat, A.; Warren, R.A.; Collis, S.M.; Wolff, D.B.; Raunyiar, S.; Jakob, C.; Petersen, W.A. An integrated approach to weather radar calibration and monitoring using ground clutter and satellite comparisons. J. Atmos. Ocean. Technol. 2019, 36, 17–39. [Google Scholar] [CrossRef] [Green Version]
- Watts, S. The ASV 21 maritime surveillance radar. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 27–32. [Google Scholar] [CrossRef]
- Xiaodong, L.; Koga, T. DAPS based adaptive tracking system for high-assurance air traffic surveillance. In Proceedings of the 2014 Integrated Communications, Navigation and Surveillance Conference (ICNS) Conference Proceedings, Herndon, VA, USA, 8–10 April 2014; pp. 1–4. [Google Scholar] [CrossRef]
- Nguyen, D.A.; Cho, B.; Seo, C.; Park, J.; Lee, D.H. Analysis of the optimal frequency band for a ballistic missile defense radar system. J. Electromagn. Eng. Sci. 2018, 18, 231–241. [Google Scholar] [CrossRef] [Green Version]
- Gómez-del Hoyo, P.J.; Del-Rey-Maestre, N.; Mata-Moya, D.; Jarabo-Amores, M.P.; Benito-Ortiz, M.C. Coherent detection and 3D tracking stages of a DVB-T based passive radar for terrestrial traffic monitoring. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2019; Volume 524, p. 012002. [Google Scholar] [CrossRef]
- Bandini, F.; Sunding, T.P.; Linde, J.; Smith, O.; Jensen, I.K.; Köppl, C.J.; Butts, M.; Bauer-Gottwein, P. Unmanned Aerial System (UAS) observations of water surface elevation in a small stream: Comparison of radar altimetry, LIDAR and photogrammetry techniques. Remote Sens. Environ. 2020, 237, 111487. [Google Scholar] [CrossRef]
- Frigeri, A.; Ercoli, M. The ScanMars subsurface radar sounding experiment on AMADEE-18. Astrobiology 2020, 20, 1338–1352. [Google Scholar] [CrossRef]
- Margot, J.L. A Data-Taking System for Planetary Radar Applications. J. Astron. Instrum. 2021, 10. [Google Scholar] [CrossRef]
- Waldschmidt, C.; Hasch, J.; Menzel, W. Automotive Radar—From First Efforts to Future Systems. IEEE J. Microw. 2021, 1, 135–148. [Google Scholar] [CrossRef]
- Liu, Z.; Cai, Y.; Wang, H.; Chen, L.; Gao, H.; Jia, Y.; Li, Y. Robust target recognition and tracking of self-driving cars with radar and camera information fusion under severe weather conditions. IEEE Trans. Intell. Transp. Syst. 2021, 1–14. [Google Scholar] [CrossRef]
- Uysal, F. Phase-coded FMCW automotive radar: System design and interference mitigation. IEEE Trans. Veh. Technol. 2020, 69, 270–281. [Google Scholar] [CrossRef] [Green Version]
- Kranold, L.; Taherzadeh, M.; Nabki, F.; Coates, M.; Popovic, M. Microwave breast screening prototype: System miniaturization with IC pulse radio. IEEE J. Electromagn. RF Microw. Med. Biol. 2021, 5, 168–178. [Google Scholar] [CrossRef]
- Du, H.; Jin, T.; He, Y.; Song, Y.; Dai, Y. Segmented convolutional gated recurrent neural networks for human activity recognition in ultra-wideband radar. Neurocomputing 2020, 396, 451–464. [Google Scholar] [CrossRef]
- Li, X.; He, Y.; Jing, X. A survey of deep learning-based human activity recognition in radar. Remote Sens. 2019, 11, 1068. [Google Scholar] [CrossRef] [Green Version]
- Luo, F.; Poslad, S.; Bodanese, E. Human activity detection and coarse localization outdoors using micro-Doppler signatures. IEEE Sens. J. 2019, 19, 8079–8094. [Google Scholar] [CrossRef]
- Jokanovic, B.; Amin, M. Fall detection using deep learning in range-Doppler radars. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 180–189. [Google Scholar] [CrossRef]
- Liu, L.; Popescu, M.; Skubic, M.; Rantz, M.; Yardibi, T.; Cuddihy, P. Automatic fall detection based on Doppler radar motion signature. In Proceedings of the 2011 5th International Conference on Pervasive Computing Technologies for Healthcare (PervasiveHealth) and Workshops, Dublin, Ireland, 23–26 May 2011; pp. 222–225. [Google Scholar]
- Liu, L.; Popescu, M.; Ho, K.C.; Skubic, M.; Rantz, M. Doppler radar sensor positioning in a fall detection system. In Proceedings of the 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, San Diego, CA, USA, 28 August–1 September 2012; pp. 256–259. [Google Scholar]
- Sana, S.; Waqar, S.; Yusaf, H.; Waqas, M.; Siddiqui, F.A. Software defined digital beam forming processor. In Proceedings of the 13th International Bhurban Conference on Applied Sciences and Technology, IBCAST 2016, Islamabad, Pakistan, 12–16 January 2016; pp. 671–676. [Google Scholar] [CrossRef]
- Molchanov, P.; Gupta, S.; Kim, K.; Pulli, K. Short-range FMCW monopulse radar for hand-gesture sensing. In Proceedings of the IEEE National Radar Conference-Proceedings, Arlington, VA, USA, 10–15 May 2015; pp. 1491–1496. [Google Scholar] [CrossRef]
- Wang, G.; Gu, C.; Inoue, T.; Li, C. A hybrid FMCW-interferometry radar for indoor precise positioning and versatile life activity monitoring. IEEE Trans. Microw. Theory Tech. 2014, 62, 2812–2822. [Google Scholar] [CrossRef]
- Jian, M.; Lu, Z.; Chen, V.C. Drone detection and tracking based on phase-interferometric Doppler radar. In Proceedings of the 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, OK, USA, 23–27 April 2018; pp. 1146–1149. [Google Scholar]
- Kim, S.; Kim, B.S.; Jin, Y.; Lee, J. Extrapolation-RELAX estimator based on spectrum partitioning for DOA estimation of FMCW radar. IEEE Access 2019, 7, 98771–98780. [Google Scholar] [CrossRef]
- Fioranelli, F.; Ritchie, M.; Griffiths, H. Bistatic human micro-Doppler signatures for classification of indoor activities. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 610–615. [Google Scholar]
- Abuduaini, A.; Shiraki, N.; Honma, N.; Nakayama, T.; Iizuka, S. Performance evaluation of multiple human-body localization using bistatic MIMO radar. In Proceedings of the 2019 IEEE Asia-Pacific Microwave Conference (APMC), Singapore, 10–13 December 2019; pp. 575–577. [Google Scholar]
- Berndt, D.J.; Clifford, J. Using dynamic time warping to find patterns in time series. In Proceedings of the 94 Workshop on Knowledge Discovery in Databases, Seattle, WA, USA, 31 July–1 August 1994; Volume 10, pp. 359–370. [Google Scholar]
- Bekar, M.; Baker, C.J.; Hoare, E.G.; Gashinova, M. Joint MIMO radar and communication system using a PSK-LFM waveform with TDM and CDM approaches. IEEE Sens. J. 2021, 21, 6115–6124. [Google Scholar] [CrossRef]
- Chen, V.C. The Micro-Doppler Effect in Radar; Artech House: Norwood, MA, USA, 2019; p. 174. [Google Scholar]
- Waqar, S.; Pätzold, M. Interchannel interference and mitigation in distributed MIMO RF sensing. Sensors 2021, 21, 7496. [Google Scholar] [CrossRef]
- Lulu, A.; Mobasseri, B.G. High-resolution range-Doppler maps by coherent extension of narrowband pulses. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 3099–3112. [Google Scholar] [CrossRef]
- Muaaz, M.; Waqar, S.; Matthias, P. Radar-based passive step counter and its comparison with a wrist-worn physical activity tracker. In Proceedings of the 4th International Conference on Intelligent Technologies and Applications INTAP 2021, Grimstad, Norway, 11–13 October 2021. [Google Scholar]
- Abdelgawwad, A.; Borhani, A.; Pätzold, M. Modelling, analysis, and simulation of the micro-Doppler effect in wideband indoor channels with confirmation through pendulum experiments. Sensors 2020, 20, 1049. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Savitzky, A.; Golay, M.J.E. Smoothing and differentiation of data by simplified least squares procedures. Anal. Chem. 1964, 36, 1627–1639. [Google Scholar] [CrossRef]
- Ismail, A.; Abdlerazek, S.; El-Henawy, I.M. Development of smart healthcare system based on speech recognition using support vector machine and dynamic time warping. Sustainability 2020, 12, 2403. [Google Scholar] [CrossRef] [Green Version]
- Fugini, M.; Finocchi, J.; Trasa, G. Gesture recognition using dynamic time warping. In Proceedings of the Workshop on Enabling Technologies: Infrastructure for Collaborative Enterprises, Virtual, 10–13 September 2020; pp. 279–282. [Google Scholar] [CrossRef]
- Muaaz, M.; Mayrhofer, R. Smartphone-based gait recognition: From authentication to imitation. IEEE Trans. Mob. Comput. 2017, 16, 3209–3221. [Google Scholar] [CrossRef]
- Muaaz, M.; Mayrhofer, R. Orientation independent cell phone based gait authentication. In Proceedings of the 12th International Conference on Advances in Mobile Computing and Multimedia, MoMM 2014, Kaohsiung, Taiwan, 8–10 December 2014; pp. 161–164. [Google Scholar] [CrossRef]
- Chen, Z.; Li, G.; Fioranelli, F.; Griffiths, H. Personnel recognition and gait classification based on multistatic micro-Doppler signatures using deep convolutional neural networks. IEEE Trans. Geosci. Remote Sens. Lett. 2018, 15, 669–673. [Google Scholar] [CrossRef] [Green Version]
- Muaaz, M.; Chelli, A.; Gerdes, M.W.; Pätzold, M. Wi-Sense: A passive human activity recognition system using Wi-Fi and convolutional neural network and its integration in health information systems. Ann. Telecommun. 2021, 1–13. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Symbols | Values |
|---|---|---|
| RF cable lengths | m | |
| Carrier frequency | GHz | |
| Radar’s bandwidth | 250 MHz | |
| Sweep time | 500 | |
| Pulse repetition freq. | 2 kHz |
| Description | Symbols | Values |
|---|---|---|
| RF cable lengths | m | |
| Carrier frequency | GHz | |
| Radar’s bandwidth | 250 MHz | |
| Sweep time | 500 | |
| Pulse repetition freq. | 1 kHz |
| Scenario | Dist. of | Dist. of | Dist. of | Dist. of |
|---|---|---|---|---|
| # | SISO Radar | MIMO Radar | ||
| 1 | ||||
| 2 | 73.8 | |||
| 3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Waqar, S.; Muaaz, M.; Pätzold, M. Human Activity Signatures Captured under Different Directions Using SISO and MIMO Radar Systems. Appl. Sci. 2022, 12, 1825. https://doi.org/10.3390/app12041825
Waqar S, Muaaz M, Pätzold M. Human Activity Signatures Captured under Different Directions Using SISO and MIMO Radar Systems. Applied Sciences. 2022; 12(4):1825. https://doi.org/10.3390/app12041825
Chicago/Turabian StyleWaqar, Sahil, Muhammad Muaaz, and Matthias Pätzold. 2022. "Human Activity Signatures Captured under Different Directions Using SISO and MIMO Radar Systems" Applied Sciences 12, no. 4: 1825. https://doi.org/10.3390/app12041825
APA StyleWaqar, S., Muaaz, M., & Pätzold, M. (2022). Human Activity Signatures Captured under Different Directions Using SISO and MIMO Radar Systems. Applied Sciences, 12(4), 1825. https://doi.org/10.3390/app12041825