1. Introduction
Cyber–physical systems (CPSs) connect physical systems in the real world and control software in cyberspace through networks. CPSs were researched for engineered systems in many application domains such as transportation, energy, and medical systems [
1,
2]. CPSs are also used in industrial process and production control to improve productivity, and to reduce costs and waste by combining advanced information technologies such as telecommunications, cloud computing, big data, artificial intelligence, and security with traditional industrial areas, including manufacturing, aviation, railway transportation, healthcare, power generation, and oil and gas development [
3].
A key technology to realize industrial CPSs is wireless sensor–actuator networks (WSANs) that can be used for information delivery between physical systems and control software [
4]. WSANs comprise several battery-operated nodes for communication and sensors that collect information regarding the physical environment. Actuators accept commands and implement actions to influence the environment. WSANs are commonly used in process industries that lack wired networks. WSANs are physically located away from the controllers and physical systems; however, they possess a structure where system measurements generated from the sensor node, and control commands generated from the controller are transmitted via radio-frequency communications across several relays. Advantages of WSAN-enabled remotely controlled physical plants include conducive environments for the hardware implementation of control algorithms, centralized controllers, and coordinated multiple plants.
To guarantee the safety of physical systems, all components of industrial CPSs should operate reliably. However, controller malfunctions can occur due to many factors, including physical causes, such as damaged power units, controller power supply failure, connector wear and tear, and poor or missing connectors. Problems also arise because of ageing equipment or natural disasters (such as typhoons or floods). Although studies were conducted on the stability of WSAN physical systems [
5], there is a lack of stability assurance research on controller failures. In such cases, the stability of a physical system cannot be guaranteed, and financial, physical, and human casualties may occur. Although many studies were conducted on attack detection, little work exists on attack recovery [
6,
7].
In this paper, we present a controller switching mechanism to enhance the resiliency of industrial CPSs. For resilient operation of industrial CPSs, the proposed method detects controller failures combined with a backup controller to maintain stability in the case of primary-controller failure. We designed the backup controller to be located away from the primary controller in WSANs and to monitor the communication of the backup controller to determine whether the primary controller failed. After primary-controller failure detection, the proposed mechanism quickly switches to the backup controller when required. We used the low-power wideband (LWB) wireless protocol for fast controller switching. Since it employs synchronous transmission, it provided reliability above 99.9% in real-world scenarios [
8]. LWB network flooding also allows for the backup controller to know the state of the plant to control the plant. To ensure the stability of the control system, controller switching should occur under the maximal allowable delay bound (MADB) conditions. We designed the WSAN scheduling of the LWB protocol and algorithm for switching controller so that the delay did not exceed MADB conditions.
To evaluate our proposed switching system, we conducted a performance evaluation using a hardware-in-the-loop experiment. Instead of modeling and simulating IoT systems and services [
9], we established a testbed that considers both the actual wireless network protocol and the physical system of the simulated process industry, thus verifying the performance of the developed technology. A network is constructed using actual TelosB motes [
10]. We used the Baloo framework [
11] to implement network stacks on the basis of synchronous transmissions. We developed the controller and physical system operated via computer simulations. We considered processes such as temperature, composition, and level control for the computer simulation. The measurement update rate for these processes can be met with 8 or 16 s [
12].
The remainder of this paper is organized as follows.
Section 2 provides the background and related work of WSANs.
Section 3 presents the system architecture, including wireless protocol. We present the proposed controller switching mechanism in
Section 4. We validate the performance of the proposed mechanism in 5. Lastly, conclusions are presented in
Section 6.
2. Related Work
Wireless networking is a key technology to realize industrial CPSs. Various organizations and alliances have developed many different protocols that operate in various frequency bands. These protocols can be divided into various communication features, such as communication range and frequency band.
Table 1 shows the features of three widely used wireless network protocols for industrial cyber–physical systems.
Long-range wide area network (LoRaWAN) is a wide-range network protocol designed to support the transmission of 2–15 km with low-power consumption. LoRaWAN uses unlicensed sub-gigahertz radio frequency bands such as 169, 433, 868 (Europe), and 915 MHz (North America) [
13]. LoRaWAN has a star topology, which means that each node needs to directly communicate with a gateway. Therefore, citywide environmental sensors, and streetlamp control and monitoring are the main applications rather than device-to-device communication [
14]. Bluetooth low-energy (BLE) and low-rate wireless personal area networks (LR-WPAN) are short-range network protocols [
15]. BLE is the RF-based technology that utilizes received-signal-strength indicators. Industry use cases of BLE are mostly real-time location systems and indoor positioning systems.
IEEE 802.15.4 LR-WPAN was developed to obtain information regarding production environments and to monitor physical systems in the 2.4 GHz unlicensed band [
16]. The superframe applied in IEEE 802.15.4 is divided into active and inactive sections. The inactive section is divided into a content access period (CAP) and a content free period (CFP); for CAP, a carrier sense multiple access/collision avoid (CSMA) is used, and for CFP, a time division multiple access (TDMA) is used. The problem of IEEE 802.15.4 is that CSMA/CA cannot provide a bounded delay and high packet-delivery ratio to reach the final destination when a large number of nodes exist. In addition, the maximal number of TDMA slots that can be increased is limited to 7. To solve this problem, IEEE 802.15.4e extends the previous 802.15.4 standard by introducing MAC behavior modes. IEEE 802.15.4e provides MAC modes of distributed synchronous multichannel extension (DSME), time-slotted channel hopping (TSCH), and low-latency deterministic networks (LLDN) [
17]. DSME MAC increases the slots of TDMA in a superframe and implements multichannel frequency hopping. TSCH MAC improves transmission rate by dividing time into slots and changing channels for every slot. LLDN MAC was designed for very-low-latency single-hop and single-channel networks.
Table 1.
Comparison of three wireless networking for industrial CPSs.
Table 1.
Comparison of three wireless networking for industrial CPSs.
| Features | LoRaWAN [13,18] | BLE [15,19] | IEEE 802.15.4 [17,20] |
|---|
Frequency
Band | 169, 433,
868, 915 MHz | 2.4 GHz | 780, 868, 950 MHz,
2.4 GHz |
| Bandwidth | 0.5–125 KHz | 80 MHz | 2 MHz |
| Data Rate | 290 bps–100 kbps | 125 kbps–2 Mbps | 100–250 kbps |
Medium
Access | Aloha | TDMA | CSMA/CA, TDMA, DSME,
TSCH, LLDN |
Communication
Range | 2–15 km | 10 m | 100 m |
| Topology | Star | Mesh | Mesh |
The recent introduction of actuator nodes enabled the realization of WSANs [
21]. Recent efforts aimed at improving the reliability of networks on the basis of their real-time states. The most common WSAN protocol is WirelessHART, which is based on the physical layer of IEEE 802.15.4. The TDMA protocol of WirelessHART and IEEE 802.15.4e provides predictable communication latency. However, network-induced time delays and data losses are inevitable in networked control systems. The disadvantage of TDMA-based communications is that retransmissions frequently occur owing to the low packet transmission rates; retransmissions also increase the overall time delay. Because one TDMA slot must be allocated for one-hop transmissions, end-to-end delays are exacerbated for retransmissions of multihop transmission. They also require a considerable amount of time to recover in the event of network failures. Therefore, TDMA protocols are not suitable for fast controller switching.
Much research on close feedback loops over WSANs considers the stability of the physical system. To ensure the stability of the physical system, studies on WSANs aim to reduce time delays, and improve reliability and real-time performance [
22,
23,
24]. More recently, designs of WSANs have been moving to support fast update intervals to keep up with the physical dynamics over multihop communication. In [
25], the authors demonstrated closed-loop control over wireless single-hop with inverted pendulum systems. They employed TDMA for the MAC layer and Bluetooth 5.0 for the PHY layer for communication between robot and remote controller. Communication latency was approximately 2 ms. In [
26], the authors proposed a fast feedback control over wireless multihop networks at update intervals of 20–50 ms. They used LWB as a network protocol to determine its advantages over TDMA of WirelessHART and IEEE 802.15.4e. They designed a dual-processor platform that includes an application processor and a communication processor to achieve the predictable and efficient execution of all application tasks and message transfers. Application tasks exclusively execute on an application processor, while the wireless protocol executes on a dedicated communication processor. In addition, studies have been conducted to solve problems caused by limited network bandwidth and network energy consumption problems in WSANs. The authors of [
27] introduced a holistic control architecture that integrated an LWB and control strategies for rate adaptation and self-triggered control strategy. Similarly, the authors in [
28] combined resource reallocation and resource savings using self-triggered control. The control system informs the communication system at run time about its resource requirements, and the communication system leverages this information to reallocate resources.
WSANs should be fault-tolerant to ensure the stability of the physical system. Fault tolerance refers to the ability of an architecture to tolerate and overcome system faults by implementing corrective actions. Various mechanisms were developed to overcome the malfunction or failure of nodes due to power depletion and environmental impacts [
29]. To resolve sensor node failure in WSANs, the authors in [
30] proposed an algorithm that assigns a hardware condition to each node by cellular learning automata. They introduced a routing algorithm on the basis of the status of the nodes to reduce the energy consumption of the networks. On the other hand, a failure avoidance technique of the actuator was proposed to solve the actuator energy-constrained problem in WSANs [
31]. They adopted a mobile charger to prevent the energy depletion of actuators. Unlike sensor and actuator nodes in WSANs, controllers do not have energy problems but may fail due to environmental impacts. However, research on the failure of the controller in WSANs is insufficient. Therefore, new techniques are required to ensure the stability of physical systems during controller failure.
Fault tolerance is typically achieved by introducing redundancy in the software and/or hardware. Controller switching is one of the methods of ensuring fault tolerance with a backup controller as a redundancy. In [
32], the authors presented a system-level Simplex architecture to preserve safety in the presence of logical faults and applied it to an inverted pendulum. When the inverted pendulum state passed the edge of the recoverable region, the safety controller took over and prevents system collapse. In [
33], the authors use supervised learning to distinguish between disturbances and malicious behavior. Once the support vector machine detected that an attack occurred, the control was switched from the primary programmable logic controllers (PLC) to a secondary PLC that executed the same controller in parallel. However, none of the works considered network protocols and controller failures.
Controller switching considering network protocols has also been studied. In wired networks, software-defined networking to dynamically change network configuration for controller switching was studied [
34,
35]. In the case of wireless networks, the authors in [
36] proposed a distributed two-tier computing architecture comprising local controllers and edge servers that could communicate over wireless networks. Switching was dynamically optimized between local and edge controllers in response to varying network conditions. One controller was locally located, whereas the other was remotely located in order to improve overall performance. However, the proposed approach is different because it aims to ensure stability against controller failure in multihop WSANs.
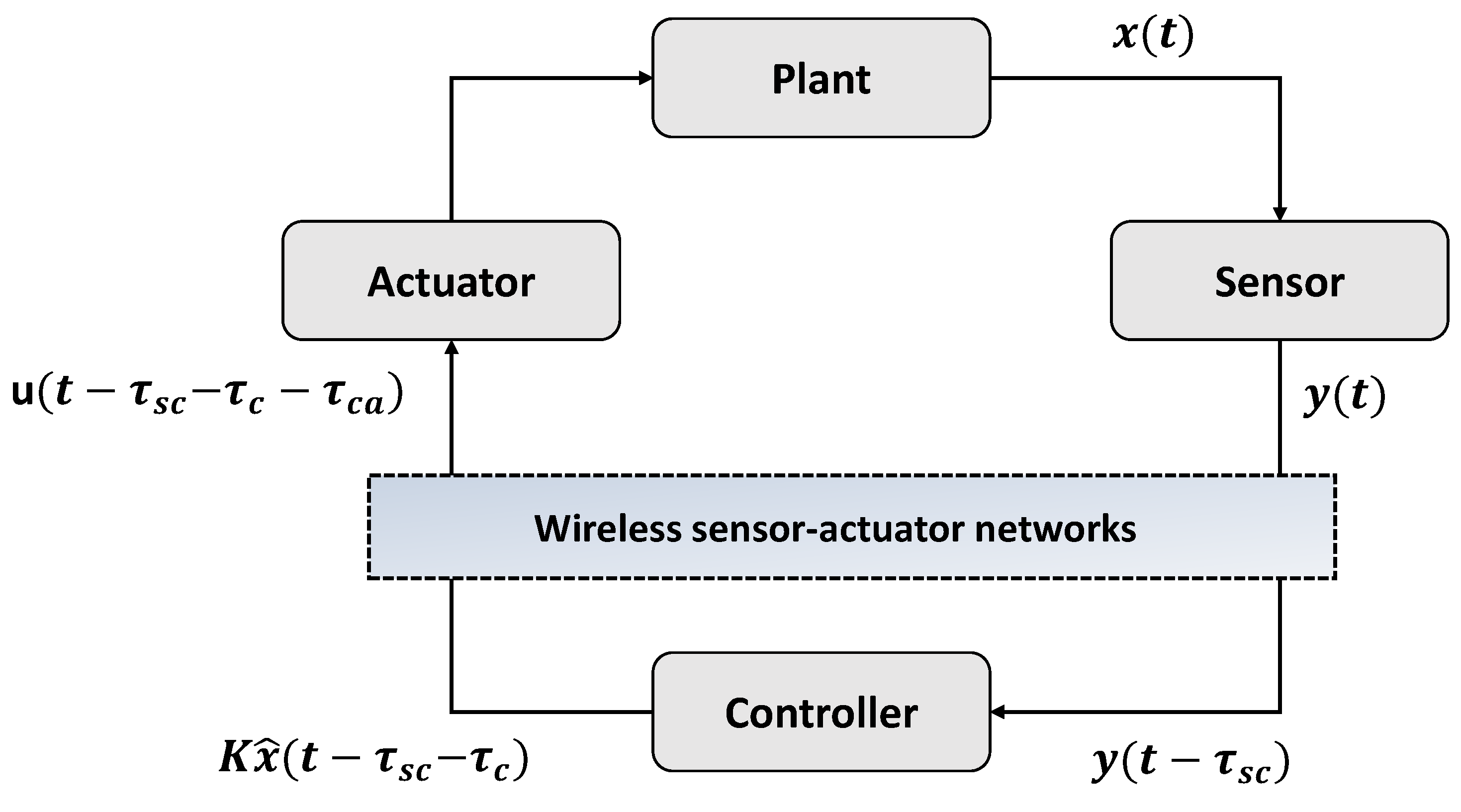
4. Controller Switching Mechanism
In this section, we present a codesign approach for the switching controllers. The process of the proposed controller switching mechanism is illustrated in
Figure 3. The proposed mechanism detects controller failures combined with a backup controller to maintain stability in case of a primary controller is failed. First, a plant is controlled through the primary controller as shown
Figure 3a. The sensor information of the plant is delivered to the primary controller, and the primary controller generates control information and transmits it to the plant. A host node in WSANs generates network scheduling information and passes it to each node in the network. The backup controller frequently checks the primary controller for failures by monitoring the communication status between the plant and the primary controller. As shown in
Figure 3b, the backup controller detects failures in the current controller and replaces the current controller in the case of an emergency. In this controller switching mechanism, the primary and backup controllers have the same hardware and control functions to calculate control input signals for plant actuation, where roles of these controllers can be determined by a CPS administrator. The only difference between primary and backup controller is that the backup controller has a fault-checking function of the primary controller. Furthermore, we assumed that the backup controller was reliable and would not break down.
To ensure the stability of the control system, we designed the controller switching to occur under the maximal allowable delay bound (MADB) conditions. In this section, we analyze the LWB network delay and MADB. Then, we designed the WSAN scheduling of the LWB protocol and algorithm for switching controller, so that the delay did not exceed MADB conditions.
4.1. LWB Network Delay
In WSANs, network delays significantly affect the performance and stability of the control system. A network delay in the scheduling technique considering LWB controller switching was analyzed, and delay analysis in the discrete domain was conducted. As shown in
Figure 4, the delay mainly comprised the delay from the sensor to the controller,
, and that from the controller to the actuator,
.
and comprise a queuing delay, a frame delay, and a propagation delay, and values that vary depend on the protocol’s design of the protocol. Additionally, a computation delay occurs in controller ; typically, such delays are very small compared with communication delays, and can thus be neglected. Thus, the total delay is . If a controller fails or packet dropout occurs, the time delay is , where d is the number of dropouts. The time delay should be less than the MADB to ensure the stability of the control system. Delays in LWB networks are bounded and constant because data transmission is achieved within a predefined time interval. and comprise a given amount of time required to process the data received from the controller and the plant and to generate the data to be transmitted. In the proposed design, data are processed at .
Figure 5 illustrates details of the controller switching mechanism. As shown in
Figure 5,
and
callback functions were executed between the two data slots,
for preparing the payload and process the received payload. The repetition of transmission occur at
.
and
is
in LWB networks. Therefore, the total delay in the LWB becomes
. For instance, if the controller does not function, a switch to the backup controller occurs in the current round, and the total delay becomes
.
4.2. MADB
The MADB is the maximal sampling period that guarantees stability even with low system performance. Numerous methods have been developed to analyze the stability of network control systems. Most of these methods employ Lyapunov stability analysis and provide conditions for the global asymptotic stability of a system [
42] Furthermore, a majority of the reported methods are typically overcomplicated for practical applications. By contrast, a simple stability analysis method was presented in [
43] that allowed the determination of the MADB in a continuous network control system derived using the finite difference approximation of the delay term and the Lyapunov system stability theorem. More detailed proofs and details can be found in [
43]. We considered a continuous state-space representation that is given by
where
,
and
are system state vector, system control input, and system output, respectively. Furthermore,
and
D are the constant matrices with appropriate size. The state feedback controller is expressed as
where
K is feedback controller gain matrix. The following were assumed:
- 1
Time-driven sensor and event-driven actuator transmit data as a single packet and reject old packets.
- 2
All system states are measurable and ready to be sent. The time delay is sufficiently small to be less than 1 unit of measurement.
Theorem 1. Considering that the above-mentioned assumptions hold, for the system of (6) with the feedback control of (7), the closed-loop system is globally asymptotically stable if , for i = 1, 2, … , n and all the second-order reminders of the state variables are sufficiently small for the given value of τ, where Ψ
is given by Here, are the eigenvalues of Ψ that must lie on the left-hand side of the complex plane. The second-order reminders refer to Taylor series expansion of state variables .
Corollary 1. For Control System (6) with control law (7), the closed-loop system is globally asymptotically stable ifwhere is the spectral matrix norm. Corollary 2. System (6) with Control Law (7) is asymptotically stable ifwhere is the minimal eigenvalue of . Corollary 3. For System (6) with Control Law (7), the closed-loop system is globally asymptotically stable ifwhere, is the absolute value. 4.3. Network Scheduling with Controller Switching
Here, we discuss network scheduling for controller switching algorithms. In the scheduling algorithm for controller switching, the only difference compared to scheduling without switching is the addition of a slot to transmit to the backup controller. This slot is only allocated, and transmission does not occur if the controller operates appropriately. The slot assignment for the switching algorithm is illustrated in
Figure 6. The backup controller can receive sensor information from the plant by using a previously assigned slot for the controller (slot k). Unlike WirelessHART’s TDMA, the LWB can receive sensor information from the plant, although the distance between the controller and backup controller is large. The backup controller monitors communications between the controller and the plants to detect controller misbehavior. In the event of an anomaly, the backup controller operates on behalf of the original controller, and the backup controller also notifies the host node so that the network can be reorganized.
We used the MADB as the timeout threshold to identify anomalies of the controller. If the backup controller does not receive an actuation command from the primary controller within a timeout threshold, the backup controller takes over. The pseudocode of the switching algorithm is presented in Algorithm 1. The backup controller increases the count value by 1 if it does not receive a packet from the primary controller’s action command in the
slot. In this study,
was set to be the same as the sampling interval of the control system. Therefore, if the count value and
product are less than the MADB, the backup controller skips this round. The stability of the control system can be ensured by transmitting the slot assigned to the next round. However, if the count value and
product are greater than the MADB, the backup controller must transmit on behalf of the primary controller to ensure the stability of the control system. Lastly, when a back-controller transfer occurs, it is passed via piggyback to the host node. The host node then notifies the administrator regarding the failure of the controller.
| Algorithm 1 Pseudocode of switching algorithm in backup controller |
- 1:
- 2:
ifactuation command from main controller is missed in slotthen - 3:
- 4:
if then - 5:
transmit actuation command - 6:
else - 7:
skip this round - 8:
end if - 9:
else - 10:
- 11:
end if
|
5. Performance Evaluation
We conducted network experiments before connecting the control system. TelosB motes were used to build wireless sensor–actuator networks. TelosB is a 2.4 GHz IEEE 802.15.4 Chipcon wireless transceiver with a data rate of 250 kbps. Baloo, based on Contiki-NG, was used to program the motes. Contiki-NG is an operating system used for resource-constrained devices on the Internet of Things. Baloo [
11] is a framework for network stacks based on synchronous transmissions.
Figure 7 shows a testbed used in WSANs experiments. It is a floor plan in which the network nodes are arranged, where the distance between a transmitter (node-3) and receiver is 30 m. The TelosB motes have indoor transmission coverage of 20–30 m, which can be diminished by signal attenuation from the walls on the building. However, the distance between each node is less than 10 m. Therefore, in the experiments, we do not consider transmission failures by the physical signal attenuation or obstacles. Furthermore, to minimize the interference by other wireless communications, such as WiFi communications by smartphones, we conduct the experiments at night time.
Red circles in
Figure 7 are the transmitter nodes that transmit packets to a receiver node (green circles). Initially, node-2 transmits packets to node-1. Thereafter, we cut off the power of node-2 and checked whether node-3 could start transmission on behalf of node-2. For node-3 to perform the switching algorithm, it must be possible to receive packets transmitted by node-2 to node-1.
Node-2 was programmed to transmit 2 B data, including its own node number (1 B) and counter value (1 B), to the host node. The counter value increased by 1 every round. We stopped the operation of node-2 when the counter value reaches 15 and checked whether node-3 was working properly. We checked if switching could take place in the current round.
Figure 8 presents the performance of the proposed switching algorithm by changing
to 1, 2, and 5 s. We conducted the experiment 10 times for each
. When the transmission of node-2 (red marker) was stopped, node-3 started transmission (blue marker) as shown in
Figure 8. Results indicate that the proposed network scheduling and algorithm for switching can be applied for control systems.
Next, we evaluated performance by using a hardware-in-the-loop experiment for controller switching. We established a testbed that combined a physical wireless network with a simulated model of a control system to create a hardware-in-the-loop experiment.
Figure 9 shows the experimental configuration. The testbed consisted of TelosB motes and computers. All motes participated in Glossy flooding communication as a node. We programmed node-1 as a host node to compute the network scheduling for the network and broadcasts it to the source nodes.
We used a total of four computers for the experiment. While communications between motes were wireless, wired communications were used to connect computers and motes. We connected the computers and the motes using a built-in USB port of motes. To monitor the network situation, we connected the host node to one computer and set the host node to transmit status information of network periodically. The remaining three computers were used for the simulation of a control system. Each simulated a primary controller, a backup controller, and a plant. The plant received actuator state changes from node-3 and produced sensor readings as output. The sensor nodes received values from the computer instead of a real sensor and sent it to the controllers.
The controller also consisted of a transmitter node and a receiver node. Here, two nodes were used to reduce the delay caused by USB serial communications. In [
26], an additional piece of equipment called Bolt was used to reduce computation delays. To reduce delays instead of using additional equipment, we employed two nodes for separately receiving and transmitting radio communications. The receiver node was only used to send the received data from network to computer, whereas the radio transmission node was used to receive data from the computer. This configuration reduced the computation delay between computers and motes at a low cost in a general-purpose control system. Apart from the relay node, five nodes were required by default, and two more were required for the backup controller.
To implement the controller design, considering the design and switching ideas described earlier, the program flow of Baloo is as follows. The host checks for updated control information and prepares and sends the control packet. The regular nodes receive these control packets. A node transitions to the running state after it receives a valid control packet in on
callback. For each data slot, if the sensor node is the initiator, the slot is assigned to the sensor nodes.
and
is set to 8 ms and 16 ms, respectively. We used Baloo’s preinstalled functions to serially communicate with the computers. We employed the
and
callback functions that were executed between the two data slots,
, as shown in
Figure 5. The original purpose of the
is to pass the payload ahead of each data slot. We used the
-callback function to read the sensor data and actuator commands from the computer. If the controller’s receiver nodes or actuator nodes receive sensor or actuator data in a data slot, the nodes execute the
callback function to process the received payload. We used the
callback function to serially send the received payload to the computer.
The controller switching mechanism also employed two callback functions. As shown in
Figure 5, the backup controller can also read sensor data in the
after the slot for sending sensor data to controller owing to the LWB characteristics. Following the data slot used to send the actuation command from the controller, the backup controller runs Algorithm 1 for controller switching in order to monitor the controller’s fault. If the backup controller decides to send an actuation command, it prepares the payload to send in
prior to the data slot for the backup controller.
With regard to the packet structure, sensor and actuator information is transmitted up to six decimal places. To reduce the size of the payload, we sent unsigned char data by two digits in the case of decimal places. Additionally, 1 B was used as an indicator for classifying the sensor and actuation data. The signs of the data and node identifier were included in the payload; each was 1 B. The total size of the payload was 8 B. The Glossy header was 2 B for Glossy, with a content-redundancy check of 16 bits. Therefore, the total packet size was 12 B.
The control execution time based on applying traditional implementation guidelines varies significantly depending on process type. The computer simulations were developed in consideration of processes such as temperature, composition, and level control that require 8 or 16 s wireless communication update rate. In the experiments, we installed the plant simulator and feedback controller simulator software proposed in [
37], where the plant and controller software was installed in the plant computer and two controller computers, respectively. The plant software updates state
of the plant with linear dynamics (
1), and actuates state
with control input signal
received from the controller software. In every sampling period
, the plant software generates sensor output packets with state
and output matrix
C in the dynamics (
1); then, it transmits the sensor output packets to controller computers. The plant model embedded in the plant software is defined in (
1) with the following parameters:
where sampling period
is 2 s.
The controller software embedded in the controller computers conducts observer-based feedback control, which estimates the state of the plant with the sensor output packets, and calculates control input signals
as illustrated in the control logic (
2). Then, the controller software generates the control input signal packets, and transmits them to the plant computer. The parameters of the observer-based state feedback controller in (
2) were chosen as follows:
Figure 10 shows the result of using the switching mechanism. We stopped the primary controller simulator at 250 s to check the controller switching mechanism (vertical line with a constant 250 value). We displayed a marker every 10 s.
Figure 10b shows the results of the sensor measurements. The backup controller detected malfunctions in the controller and initiated transmission in place of the controller. However, the state of the plant increased to infinity without a controller switching mechanism after 250 s.
Figure 10b shows the result of the control input signals. Unlike when the switching mechanism was used, the primary controller could no longer transmit the control input signal. Therefore, the plant performed control by using the control input value transmitted at 250 s as it is. Results indicate that the proposed mechanism could quickly recover by switching to the backup controller in the case of controller failure.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}