
Designing the Controller-Based Urban Traffic Evaluation and Prediction Using Model Predictive Approach




Abstract
:1. Introduction
- Compulsory migration for urban dwellers.
- Development of urban transport infrastructure.
- Improving the use of available infrastructure.
Problem Statement
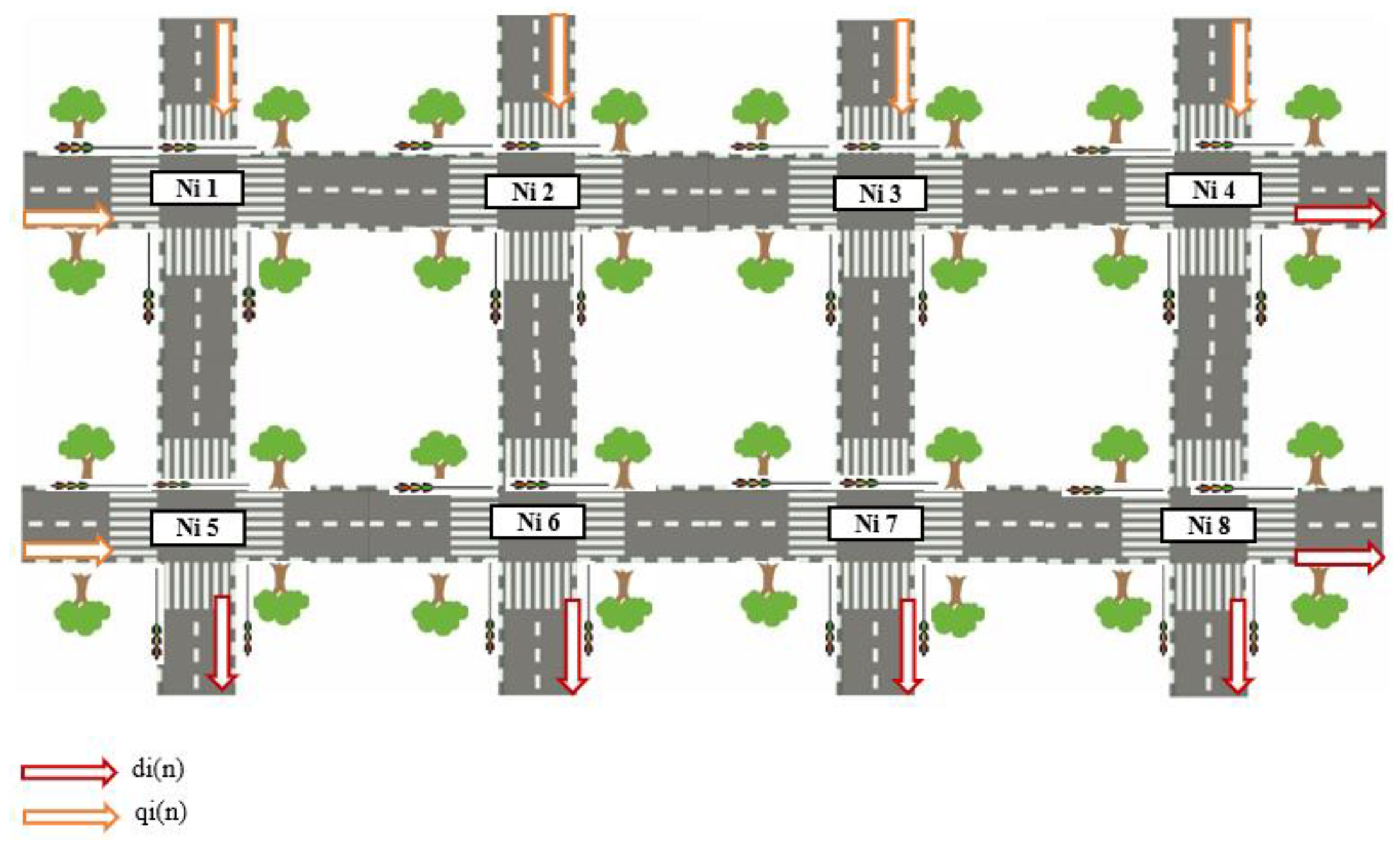
- Linking eight intersections in urban traffic with the use of multiagents.
- Proof and stability of the proposed model.
- Design model predictive controller reduces the number of vehicles in the queue.
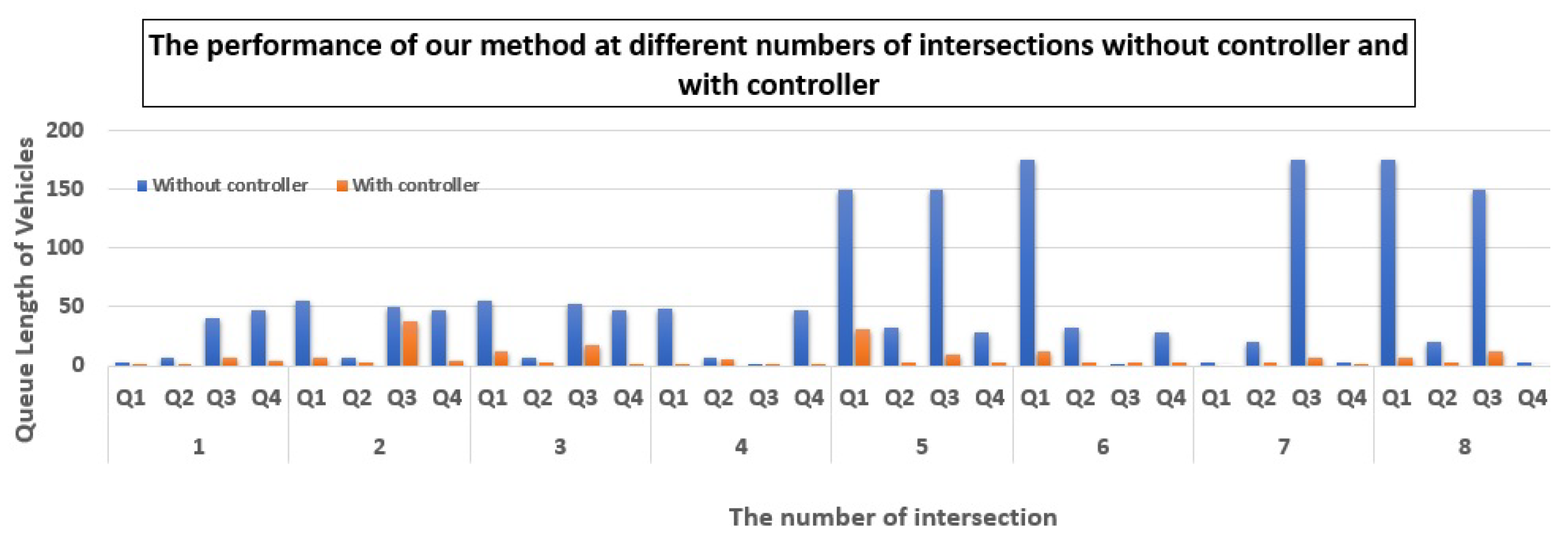
- Evaluate the average number of cars queued in the two models with and without a controller.
2. Related Works
2.1. Urban Traffic Control with Multi-Agent
2.2. Urban Traffic by Using Predictive Model Control
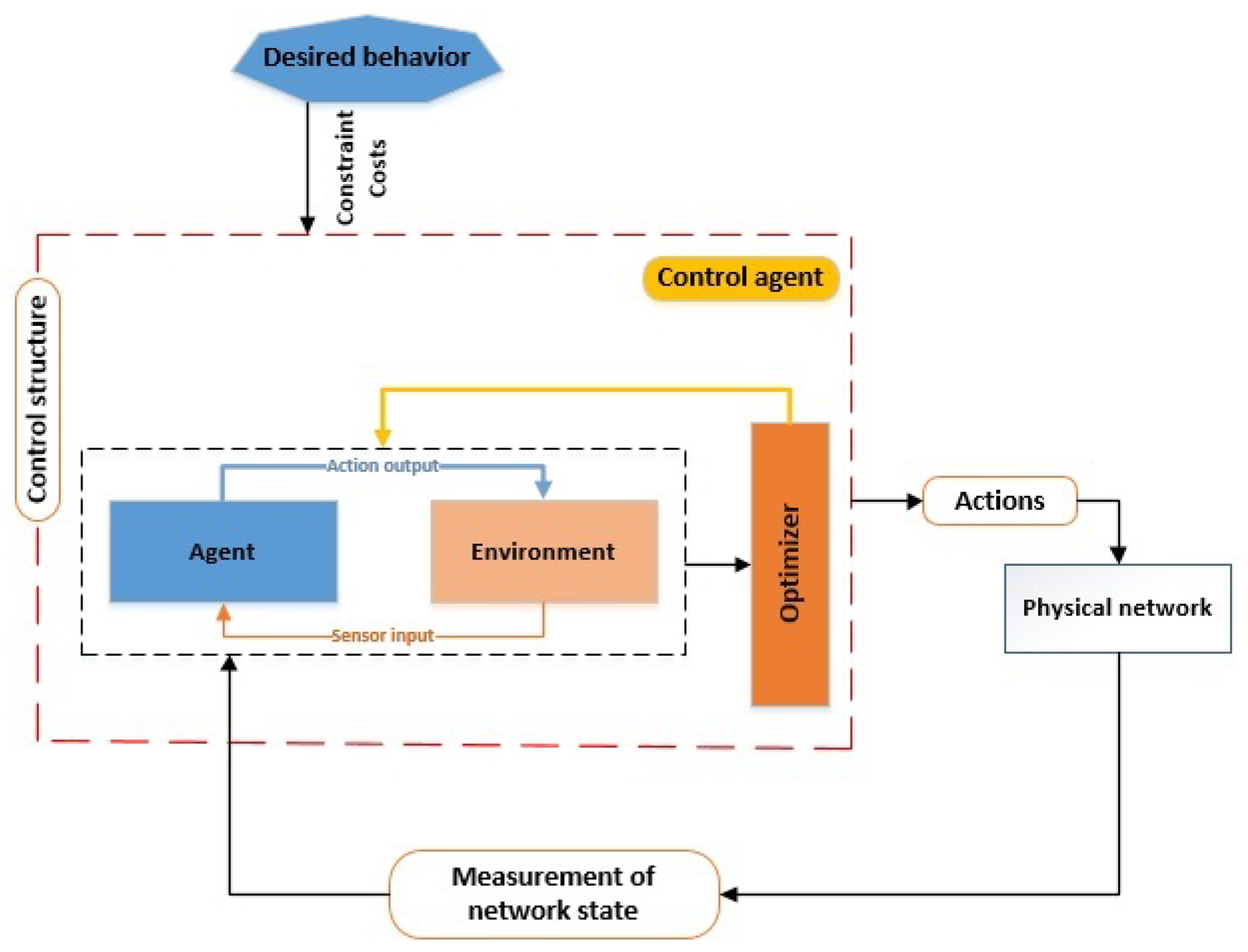
3. Multi-Agent and Model Predictive Control
- In a system model, the selected can be a hierarchical system.
- The control issue adjusts to minimize the hierarchical cost function.
- A hierarchical control problem can be solved using hierarchical architecture.
- Agents must communicate in the model predictive multiagent system. The centralized system and control problem are separated, and they become smaller problems dependent upon each other.
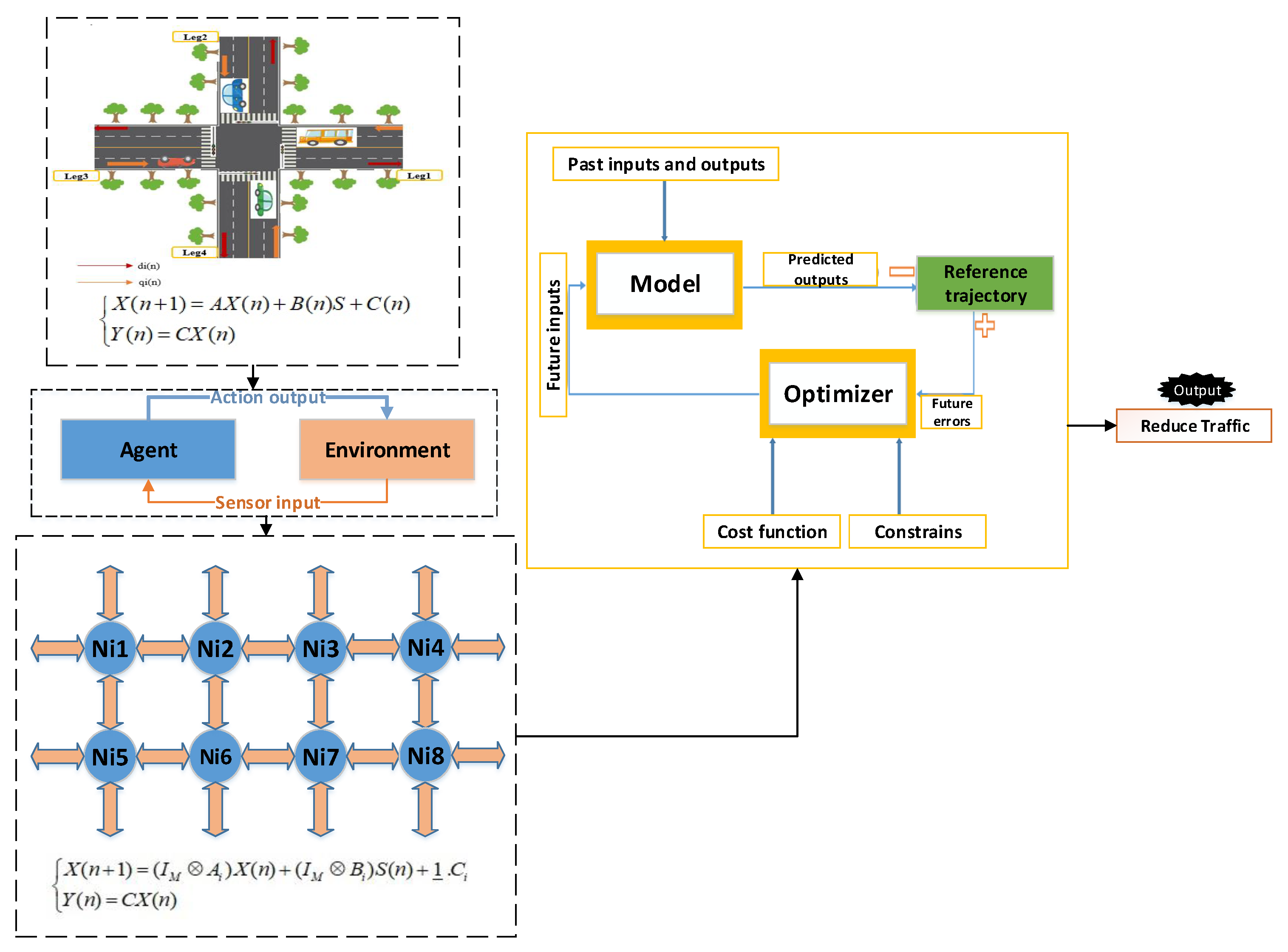
4. Mathematical Models in Intersections
Mathematical Model of Multi-Agent Intersections
5. Designing Stable Predictive Controller for Multi-Agent Intersections
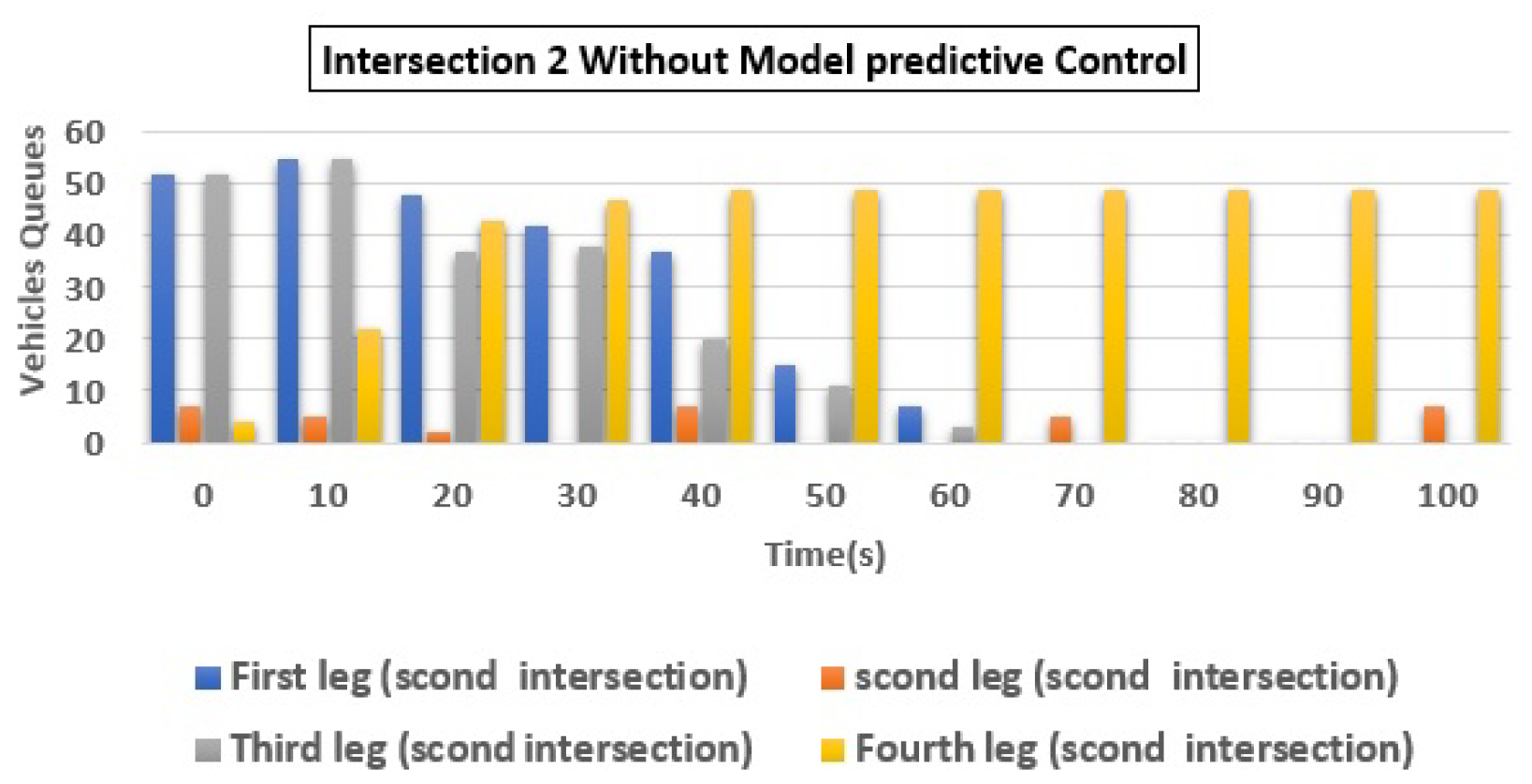
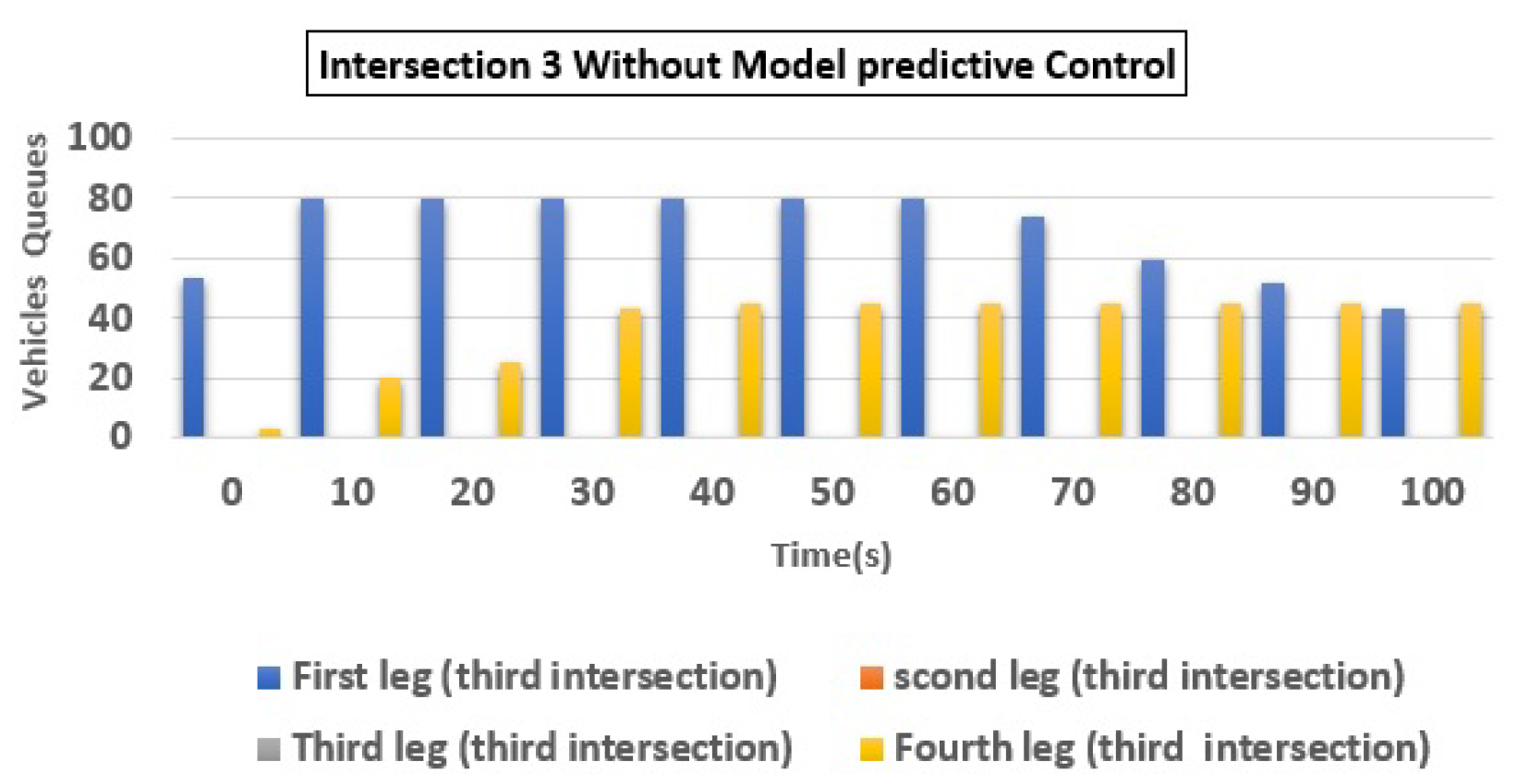
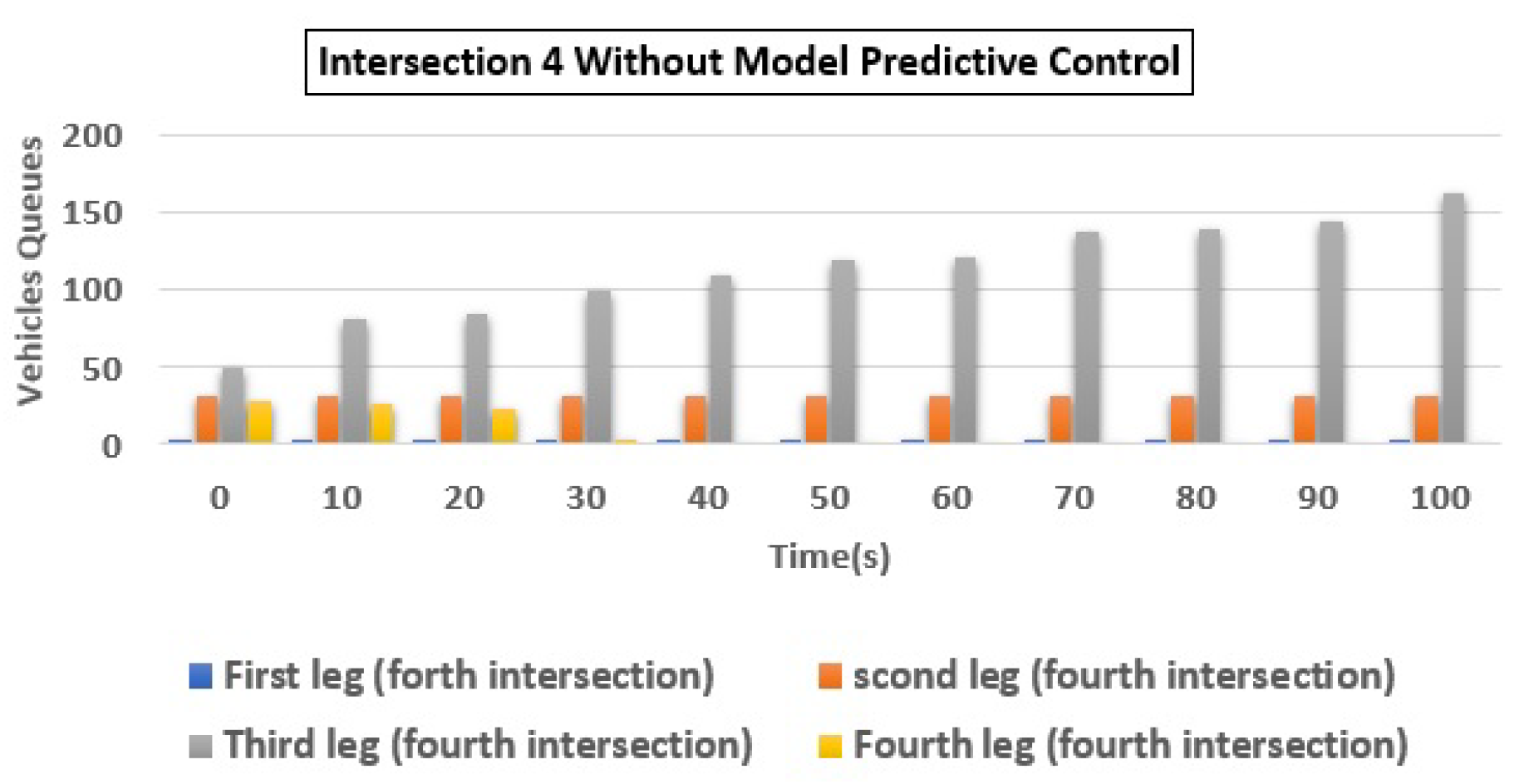
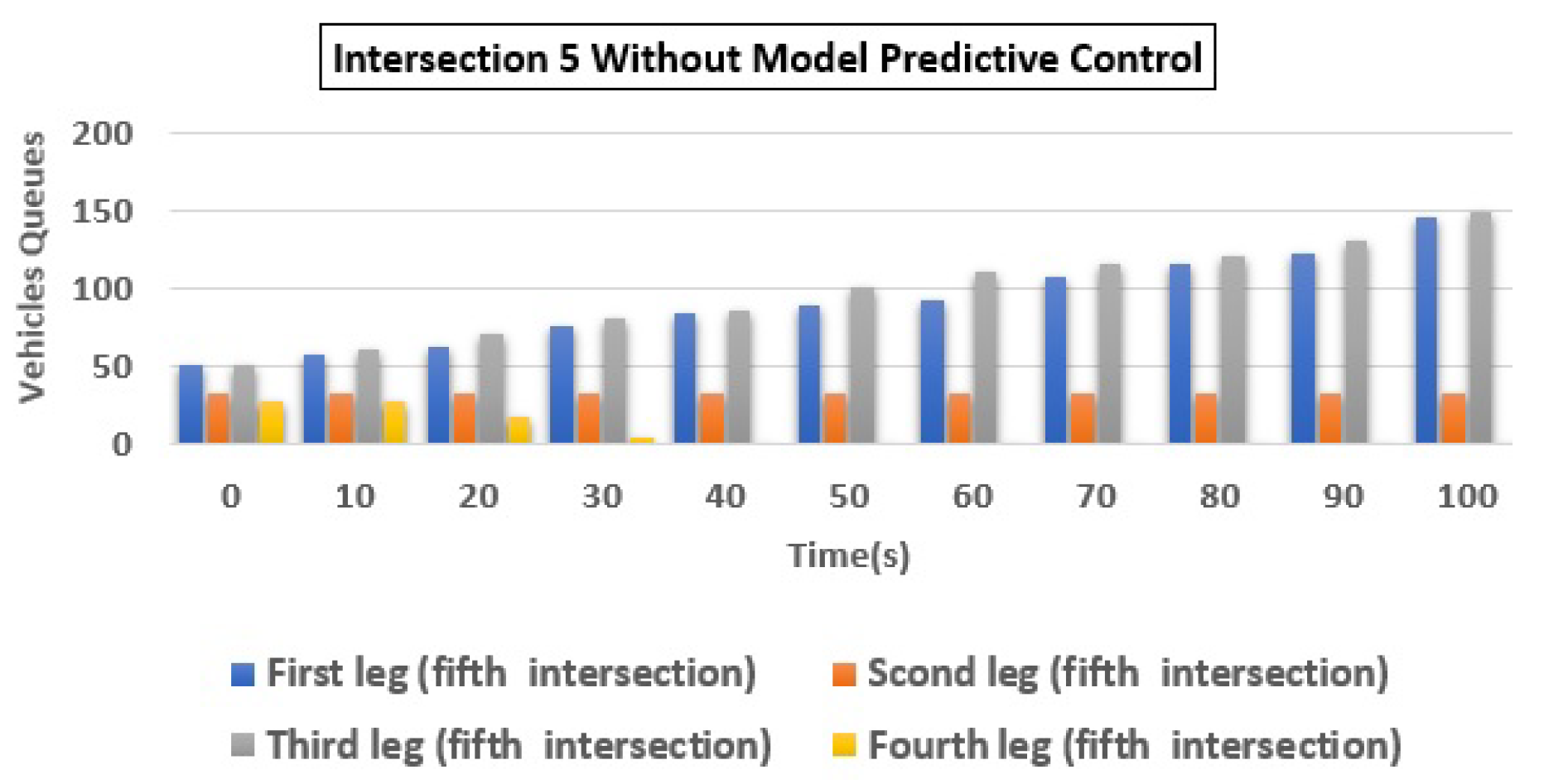
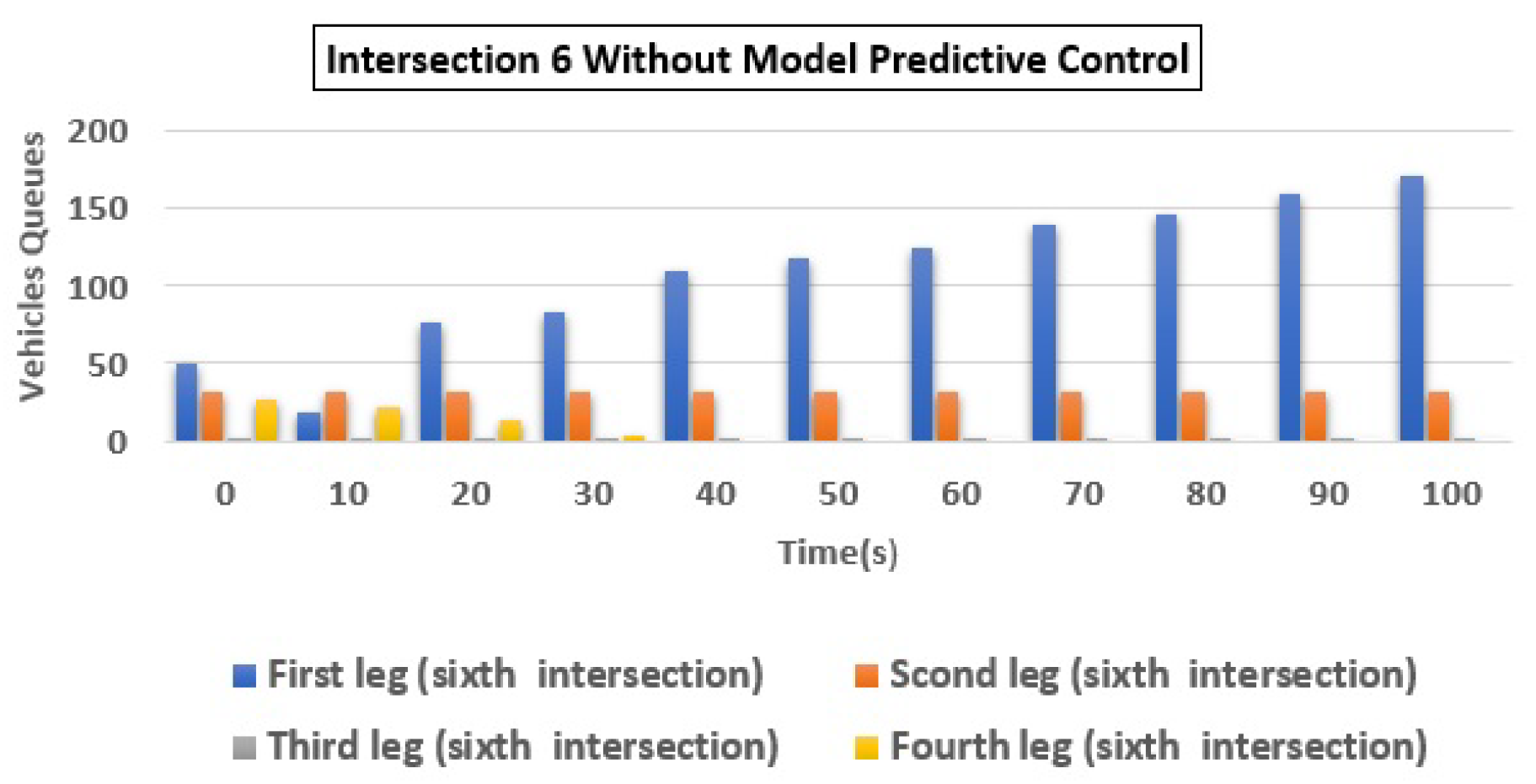
6. Simulation Results
The Comparison of the Proposed Method with Other Existing Studies
- Model predictive control is updated every minute, and this update applies controls based on what will happen in the future to the system.
- They can be used for delayed systems and multidimensional systems.
- Can be added to that constraint. For example: control the traffic load behind the crossroads for one h a day.
- Being bound by model predictive control.
- All controllers are unpredictable, including advanced controllers such as slip model control (a nonlinear controller is resistant). Nonlinear resistors mean that they do their job against system uncertainties. For example, in the math model from the real world, we do not know the name of a parameter.
- Unlike all controllers, the predictor signal drops at to . (.
- Model predictive control has several models. Any situation that is based on step response and impact response must be stable. The system must have no integral behavior. Integral behavior means that there should be no necessities in the system model.
- In the basic model, the conversion function is noise-sensitive.
7. Conclusions
Discussion and Future Direction
- Provide a comprehensive model of traffic behavior at several adjacent intersections by considering parking lots and side streets near the adjacent intersection and parking lots and side roads near intersections in the model.
- Hybrid systems are used to design suitable transmission systems by designing several models.
- We impose traffic restrictions on pedestrians, weather conditions, etc.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jamil, F.; Hang, L.; Kim, K.; Kim, D. A Novel Medical Blockchain Model for Drug Supply Chain Integrity Management in a Smart Hospital. Electronics 2019, 8, 505. [Google Scholar] [CrossRef] [Green Version]
- Jamil, F.; Ahmad, S.; Iqbal, N.; Kim, D.H. Towards a Remote Monitoring of Patient Vital Signs Based on IoT-Based Blockchain Integrity Management Platforms in Smart Hospitals. Sensors 2020, 20, 2195. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jamil, F.; Iqbal, M.A.; Amin, R.; Kim, D. Adaptive thermal-aware routing protocol for wireless body area network. Electronics 2019, 8, 47. [Google Scholar] [CrossRef] [Green Version]
- Shahbazi, Z.; Byun, Y.C. Blockchain-based Event Detection and Trust Verification Using Natural Language Processing and Machine Learning. IEEE Access 2021, 10, 5790–5800. [Google Scholar] [CrossRef]
- Shahbazi, Z.; Byun, Y.C. Improving the Cryptocurrency Price Prediction Performance Based on Reinforcement Learning. IEEE Access 2021, 9, 162651–162659. [Google Scholar] [CrossRef]
- Yen, C.C.; Ghosal, D.; Zhang, M.; Chuah, C.N. Security Vulnerabilities and Protection Algorithms for Backpressure-Based Traffic Signal Control at an Isolated Intersection. IEEE Trans. Intell. Transp. Syst. 2021. [Google Scholar] [CrossRef]
- Du, Y.; Shangguan, W.; Chai, L. A Coupled Vehicle-Signal Control Method at Signalized Intersections in Mixed Traffic Environment. IEEE Trans. Veh. Technol. 2021. [Google Scholar] [CrossRef]
- Shahbazi, Z.; Byun, Y.C. A framework of vehicular security and demand service prediction based on data analysis integrated with blockchain approach. Sensors 2021, 21, 3314. [Google Scholar] [CrossRef]
- Shahbazi, Z.; Byun, Y.C. A Procedure for Tracing Supply Chains for Perishable Food Based on Blockchain, Machine Learning and Fuzzy Logic. Electronics 2021, 10, 41. [Google Scholar] [CrossRef]
- Guo, Q.; Li, L.; Ban, X.J. Urban traffic signal control with connected and automated vehicles: A survey. Transp. Res. Part C Emerg. Technol. 2019, 101, 313–334. [Google Scholar] [CrossRef]
- Akcelik, R.; Besley, M.; Chung, E. An evaluation of SCATS Master Isolated control. In Proceedings of the 19th Arrb Transport Research Ltd Conference, Sydney, NSW, Australia, 7–11 December 1998. [Google Scholar]
- Qadri, S.S.S.M.; Gökçe, M.A.; Öner, E. State-of-art review of traffic signal control methods: Challenges and opportunities. Eur. Transp. Res. Rev. 2020, 12, 1–23. [Google Scholar] [CrossRef]
- Shahbazi, Z.; Byun, Y.C. Integration of Blockchain, IoT and Machine Learning for Multistage Quality Control and Enhancing Security in Smart Manufacturing. Sensors 2021, 21, 1467. [Google Scholar] [CrossRef] [PubMed]
- Shahbazi, Z.; Byun, Y.C. Smart Manufacturing Real-Time Analysis Based on Blockchain and Machine Learning Approaches. Appl. Sci. 2021, 11, 3535. [Google Scholar] [CrossRef]
- Shahbazi, Z.; Byun, Y.C. Blockchain and Machine Learning for Intelligent Multiple Factor-Based Ride-Hailing Services. CMC-Comput. Mater. Contin. 2022, 70, 4429–4446. [Google Scholar] [CrossRef]
- Jamil, F.; Kim, D. Payment mechanism for electronic charging using blockchain in smart vehicle. Korea 2019, 30, 31. [Google Scholar]
- Ahmad, S.; Jamil, F.; Khudoyberdiev, A.; Kim, D. Accident risk prediction and avoidance in intelligent semi-autonomous vehicles based on road safety data and driver biological behaviours. J. Intell. Fuzzy Syst. 2020, 38, 4591–4601. [Google Scholar] [CrossRef]
- Ahmad, S.; Jamil, F.; Iqbal, N.; Kim, D. Optimal route recommendation for waste carrier vehicles for efficient waste collection: A step forward towards sustainable cities. IEEE Access 2020, 8, 77875–77887. [Google Scholar] [CrossRef]
- Jafari, S.; Shahbazi, Z.; Byun, Y.C. Traffic Control Prediction Design Based on Fuzzy Logic and Lyapunov Approaches to Improve the Performance of Road Intersection. Processes 2021, 12, 2205. [Google Scholar] [CrossRef]
- Guo, Y.; Yang, L.; Hao, S.; Gu, X. Perimeter traffic control for single urban congested region with macroscopic fundamental diagram and boundary conditions. Phys. A Stat. Mech. Its Appl. 2021, 562, 125401. [Google Scholar] [CrossRef]
- Fosu, G.O.; Oduro, F.T.; Caligaris, C. Multilane analysis of a viscous second-order macroscopic traffic flow model. Partial. Differ. Equ. Appl. 2021, 2, 1–17. [Google Scholar] [CrossRef]
- Adacher, L.; Tiriolo, M. A macroscopic model with the advantages of microscopic model: A review of Cell Transmission Model’s extensions for urban traffic networks. Simul. Model. Pract. Theory 2018, 86, 102–119. [Google Scholar] [CrossRef]
- Wang, F.Y. Toward a revolution in transportation operations: AI for complex systems. IEEE Intell. Syst. 2008, 23, 8–13. [Google Scholar] [CrossRef]
- Wu, T.; Zhou, P.; Liu, K.; Yuan, Y.; Wang, X.; Huang, H.; Wu, D.O. Multi-agent deep reinforcement learning for urban traffic light control in vehicular networks. IEEE Trans. Veh. Technol. 2020, 69, 8243–8256. [Google Scholar] [CrossRef]
- Louati, A.; Louati, H.; Nusir, M.; Hardjono, B. Multi-agent deep neural networks coupled with LQF-MWM algorithm for traffic control and emergency vehicles guidance. J. Ambient. Intell. Humaniz. Comput. 2020, 11, 5611–5627. [Google Scholar] [CrossRef]
- Kamal, M.A.S.; Tan, C.P.; Hayakawa, T.; Azuma, S.I.; Imura, J.I. Control of Vehicular Traffic at an Intersection Using a Cyber-Physical Multi-Agent Framework. IEEE Trans. Ind. Inform. 2021, 17, 6230–6240. [Google Scholar] [CrossRef]
- Shi, P.; Yan, B. A Survey on Intelligent Control for Multiagent Systems. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 161–175. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, H.; Fu, Z.; Wang, Y. Learning scalable multi-agent coordination by spatial differentiation for traffic signal control. Eng. Appl. Artif. Intell. 2021, 100, 104165. [Google Scholar] [CrossRef]
- Wang, T.; Cao, J.; Hussain, A. Adaptive Traffic Signal Control for large-scale scenario with Cooperative Group-based Multi-agent reinforcement learning. Transp. Res. Part C Emerg. Technol. 2021, 125, 103046. [Google Scholar] [CrossRef]
- Xu, M.; An, K.; Vu, L.H.; Ye, Z.; Feng, J.; Chen, E. Optimizing multi-agent based urban traffic signal control system. J. Intell. Transp. Syst. 2019, 23, 357–369. [Google Scholar] [CrossRef]
- Mayne, D.Q.; Rawlings, J.B.; Rao, C.V.; Scokaert, P.O. Constrained model predictive control: Stability and optimality. Automatica 2000, 36, 789–814. [Google Scholar] [CrossRef]
- Berrouk, S.; Fazziki, A.E.; Boucetta, Z. Towards an agent-based framework for urban traffic congestion management. Int. J. Internet Technol. Secur. Trans. 2020, 10, 694–720. [Google Scholar] [CrossRef]
- Sirmatel, I.I.; Geroliminis, N. Stabilization of city-scale road traffic networks via macroscopic fundamental diagram-based model predictive perimeter control. Control Eng. Pract. 2021, 109, 104750. [Google Scholar] [CrossRef]
- Ye, B.L.; Wu, W.; Gao, H.; Lu, Y.; Cao, Q.; Zhu, L. Stochastic model predictive control for urban traffic networks. Appl. Sci. 2017, 7, 588. [Google Scholar] [CrossRef] [Green Version]
- Azimirad, E.; Pariz, N.; Sistani, M.B.N. A novel fuzzy model and control of single intersection at urban traffic network. IEEE Syst. J. 2010, 4, 107–111. [Google Scholar] [CrossRef]
- Haber, R.E.H.; Artuñedo, A.A.; del Toro Toro, R.M. Consensus-Based Cooperative Control Based on Pollution Sensing and Traffic Information for Urban Traffic Networks; National Library of Medicine: Rockville Pike Bethesda, MD, USA, 2017.
- Tian, X.; An, C.; Chen, Z.; Tian, Z. Assessing the impact of COVID-19 pandemic on urban transportation and air quality in Canada. Sci. Total Environ. 2021, 765, 144270. [Google Scholar] [CrossRef] [PubMed]
- Khan, S.; Nazir, S.; Vilas Kharat, P.; Garc, A. Deep learning-based urban big data fusion in smart cities: Towards traffic monitoring and flow-preserving fusion. Comput. Electr. Eng. 2021, 89, 106906. [Google Scholar] [CrossRef]
- Zhou, F.; Li, L.; Zhang, K.; Trajcevski, G. Urban flow prediction with spatial–temporal neural ODEs. Transp. Res. Part C Emerg. Technol. 2021, 124, 102912. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, Y.; Zhou, W.; Wang, H.; Ouyang, X. Multi-city traffic flow forecasting via multi-task learning. Appl. Intell. 2021, 1–19. [Google Scholar] [CrossRef]
- Mileti, M.; Kapusta, B.; Ivanjko, E. Comparison of two approaches for preemptive traffic light control. In Proceedings of the 2018 International Symposium ELMAR, Zadar, Croatia, 16–19 September 2018; pp. 57–62. [Google Scholar]
- Mao, T.; Mihaita, A.S.; Chen, F.; Vu, H.L. Boosted Genetic Algorithm using Machine Learning for traffic control optimization. arXiv 2021, arXiv:2103.08317. [Google Scholar] [CrossRef]
- Wang, H.; Zhu, M.; Hong, W.; Wang, C.; Tao, G.; Wang, Y. Optimizing Signal Timing Control for Large Urban Traffic Networks Using an Adaptive Linear Quadratic Regulator Control Strategy. IEEE Trans. Intell. Transp. Syst. 2020. [Google Scholar] [CrossRef]
- Radja, D.; TOLBA, C.; Moh, A.N.S. Traffic Urban Control Using an Intelligent PSO Algorithm Based on Integrated Approach. Alger. J. Signals Syst. 2020, 5, 1–9. [Google Scholar]
- Lei, T.; Hou, Z.; Ren, Y. Data-driven model free adaptive perimeter control for multi-region urban traffic networks with route choice. IEEE Trans. Intell. Transp. Syst. 2019, 21, 2894–2905. [Google Scholar] [CrossRef]
- Pawłowicz, B.; Trybus, B.; Salach, M.; Jankowski-Mihułowicz, P. Dynamic RFID Identification in Urban Traffic Management Systems. Sensors 2020, 20, 4225. [Google Scholar] [CrossRef]
- Zhou, C.; Mo, H.; Chen, X.; Wen, H. Fuzzy Control Under Time-Varying Universe and Phase Optimization in Traffic Lights (ICSSE 2020). Int. J. Fuzzy Syst. 2021, 1–12. [Google Scholar] [CrossRef]
- Li, Y.; Lu, S. Study on the optimization of urban passenger traffic structure based on multi-objective linear programming—A case study of Beijing. Environ. Sci. Pollut. Res. 2021, 28, 10192–10206. [Google Scholar] [CrossRef] [PubMed]
- Hoang Pham, V.; Sakurama, K.; Mou, S.; Ahn, H.S. Distributed traffic control for a large-scale urban network. arXiv 2020, arXiv:2005.02007. [Google Scholar]
- Khajehvand, M.; Rassafi, A.A.; Mirbaha, B. Modeling traffic noise level near at-grade junctions: Roundabouts, T and cross intersections. Transp. Res. Part D Transp. Environ. 2021, 93, 102752. [Google Scholar] [CrossRef]
- Duan, Z.; Yang, Y.; Zhang, K.; Ni, Y.; Bajgain, S. Improved deep hybrid networks for urban traffic flow prediction using trajectory data. IEEE Access 2018, 6, 31820–31827. [Google Scholar] [CrossRef]
- Paricio, A.; Lopez-Carmona, M.A. Urban traffic routing using weighted multi-map strategies. IEEE Access 2019, 7, 153086–153101. [Google Scholar] [CrossRef]
- Jafari, S.; Shahbazi, Z.; Byun, Y.C. Improving the Performance of Single-Intersection Urban Traffic Networks Based on a Model Predictive Controller. Sustainability 2021, 13, 5630. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, J.; Wang, H. Urban traffic control in software defined internet of things via a multi-agent deep reinforcement learning approach. IEEE Trans. Intell. Transp. Syst. 2020, 22, 3742–3754. [Google Scholar] [CrossRef]
- Joo, H.; Lim, Y. Intelligent Traffic Signal Phase Distribution System Using Deep Q-Network. Appl. Sci. 2022, 12, 425. [Google Scholar] [CrossRef]
- Ge, H.; Song, Y.; Wu, C.; Ren, J.; Tan, G. Cooperative deep Q-learning with Q-value transfer for multi-intersection signal control. IEEE Access 2019, 7, 40797–40809. [Google Scholar] [CrossRef]
- Thonhofer, E.; Palau, T.; Kuhn, A.; Jakubek, S.; Kozek, M. Macroscopic traffic model for large scale urban traffic network design. Simul. Model. Pract. Theory 2018, 80, 32–49. [Google Scholar] [CrossRef]
- Mohebifard, R.; Al Islam, S.B.; Hajbabaie, A. Cooperative traffic signal and perimeter control in semi-connected urban-street networks. Transp. Res. Part C Emerg. Technol. 2019, 104, 408–427. [Google Scholar] [CrossRef]
- Wang, Y.; Cai, P.; Lu, G. Cooperative autonomous traffic organization method for connected automated vehicles in multi-intersection road networks. Transp. Res. Part C Emerg. Technol. 2020, 111, 458–476. [Google Scholar] [CrossRef]
- Boukerche, A.; Zhong, D.; Sun, P. A Novel Reinforcement Learning-based Cooperative Traffic Signal System through Max-pressure Control. IEEE Trans. Veh. Technol. 2021. [Google Scholar] [CrossRef]
- Fu, X.; Gao, H.; Cai, H.; Wang, Z.; Chen, W. How to improve urban intelligent traffic? A case study using traffic signal timing optimization model based on swarm intelligence algorithm. Sensors 2021, 21, 2631. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | Model | Advantages | Limitation |
|---|---|---|---|
| Haber et al. [36] | Cooperative control of urban subsystems | Improve the performance | Urban traffic networks |
| Pallavi et al. [37] | Deep reinforcement learning | Decision-making capabilities | Region-based traffic flow |
| Sulaiman et al. [38] | Deep learning-based | Prediction | Framework urban traffic flow |
| Fan et al. [39] | Spatial- temporal Ordinary Differential Equations | Prediction accuracy and computational efficiency | Multi-city traffic flow |
| Yiling et al. [40] | Multi-task learning | Prediction, multi-task learning | Control signal traffic, traffic control |
| Miletić et al. [41] | Fuzzy logic | Reduce traffic | Traffic signal |
| Tuo et al. [42] | Machine learning, genetic algorithms | Fast, training parameter, minimize | Traffic signal |
| Hong et al. [43] | Adaptive linear quadratic | Reduced traffic delay and energy consumption | Urban traffic control operations |
| Radja et al. [44] | Particle Swarm Optimization | Reducing fuel consumption and pollutant emissions, optimal signal timing | Urban traffic networks with course determination |
| Ting et al. [45] | Data-driven model free | Improve the performance | Urban traffic management |
| Bartosz et al. [46] | Dynamic Radio Frequency IDentification identification | Identification | Traffic lights under the universe |
| Cang et al. [47] | Fuzzy logic | Reduce and improve, optimal | Traffic light control for heterogeneous, traffic systems |
| Yanmei et al. [48] | Multi-objective linear programming | Guarantees the interests of passengers, reduce carbon emissions, minimize | Traffic light control for heterogeneous traffic systems |
| Hoang et al. [49] | Distributed control strategy | Optimal and minimize | Large-scale urban network |
| Mahdiyeh et al. [50] | Multiple linear regression model | Multiple linear regression model | Modeling traffic noise level in intersection |
| Zongtao et.al. [51] | Deep hybrid network | Prediction | Urban traffic flow |
| Alvaro et al. [52] | Weighted multi-map strategies | Traffic management | Urban traffic |
| Component | Description |
|---|---|
| Queue length | |
| The number of vehicles that enter the queue | |
| The number of vehicles that have left the queue | |
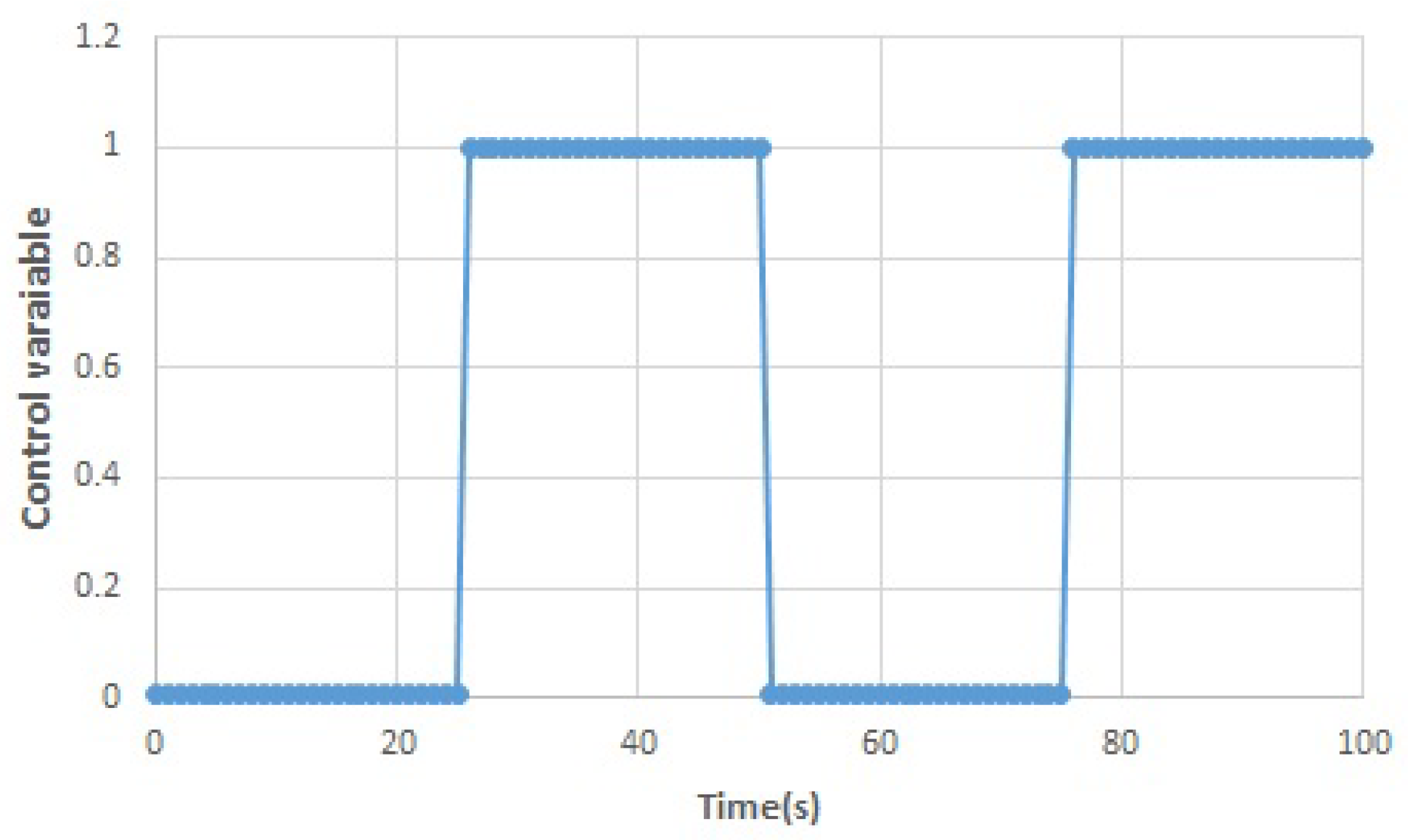
| Control signal | |
| Waiting time | |
| T | Sampling time |
| X(n) | Model variable vector |
| S(n) | Control signal |
| Identity matrix | |
| Metrics | |
| J | Cost function |
| y(n) | New output |
| y’(n) | Output |
| H | Hamilton equation |
| ⊗ | Kronecker |
| Queue Length of Vehicles | Intersection | Without Controller | With Controller | Improvement (%) |
|---|---|---|---|---|
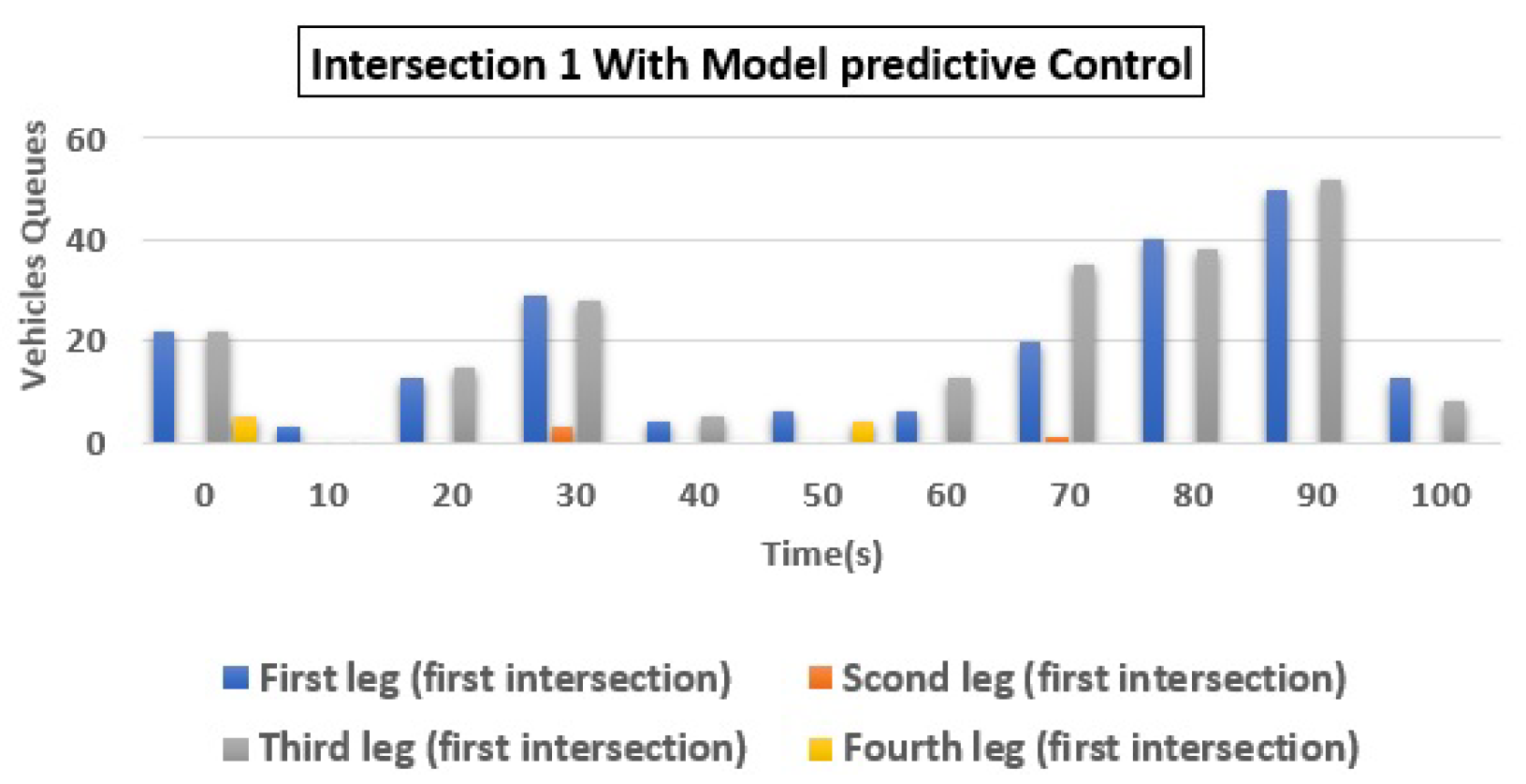
| 1 | (a) Q1 | 3 | 1 | 66.67 |
| (b) Q2 | 7 | 1 | 85.71 | |
| (c) Q3 | 40 | 7 | 82.50 | |
| (d) Q4 | 47 | 4 | 91.49 | |
| Total | 97 | 13 | 86.60 | |
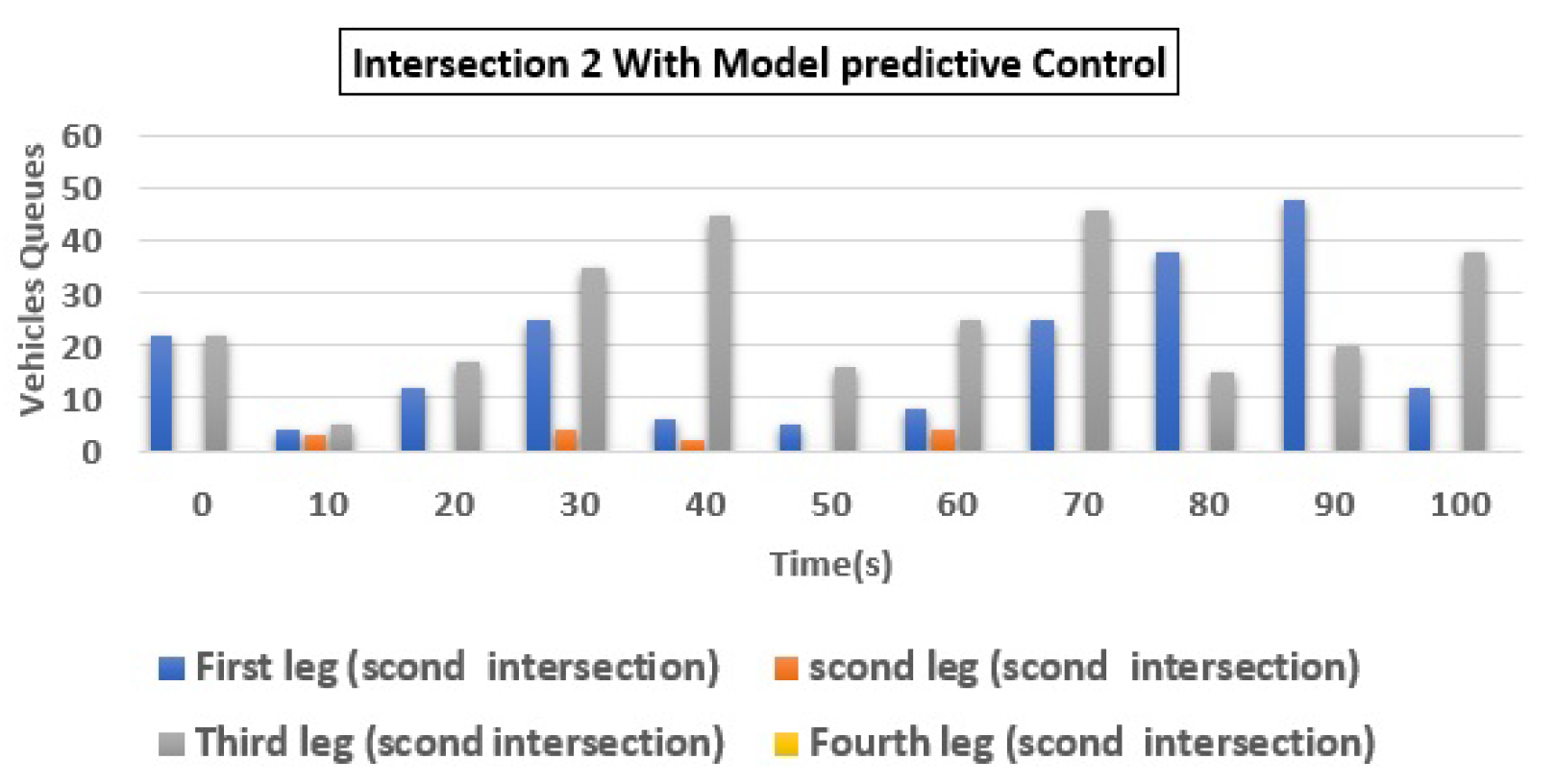
| 2 | (a) Q1 | 55 | 7 | 87.27 |
| (b) Q2 | 7 | 3 | 57.14 | |
| (c) Q3 | 50 | 38 | 24.00 | |
| (d) Q4 | 47 | 4 | 91.49 | |
| Total | 159 | 52 | 67.30 | |
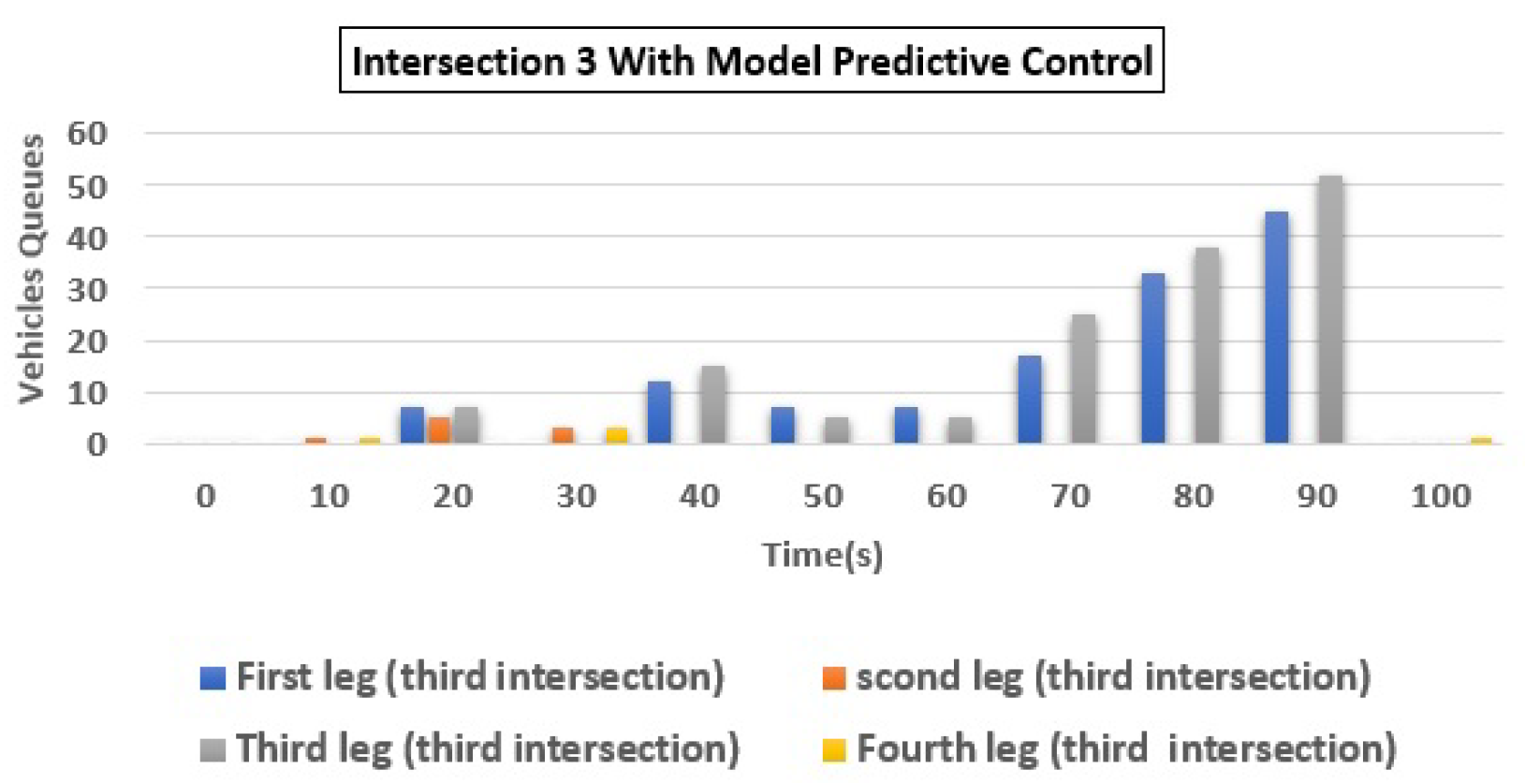
| 3 | (a) Q1 | 55 | 12 | 78.18 |
| (b) Q2 | 7 | 3 | 57.14 | |
| (c) Q3 | 53 | 17 | 67.92 | |
| (d) Q4 | 47 | 1 | 97.87 | |
| Total | 162 | 33 | 79.63 | |
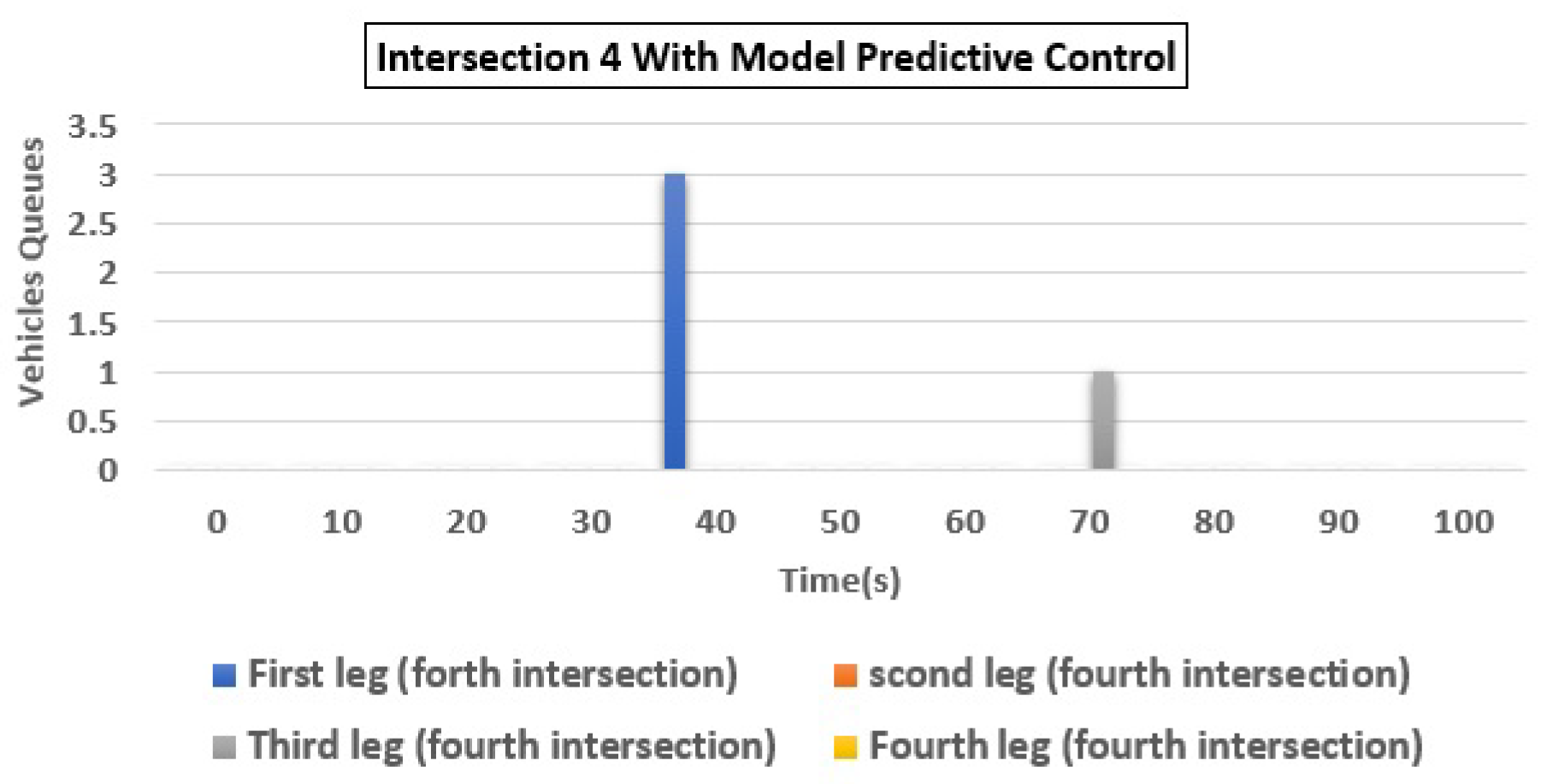
| 4 | (a) Q1 | 49 | 1 | 97.96 |
| (b) Q2 | 7 | 6 | 14.29 | |
| (c) Q3 | 2 | 1 | 50.00 | |
| (d) Q4 | 47 | 1 | 97.87 | |
| Total | 105 | 9 | 91.43 | |
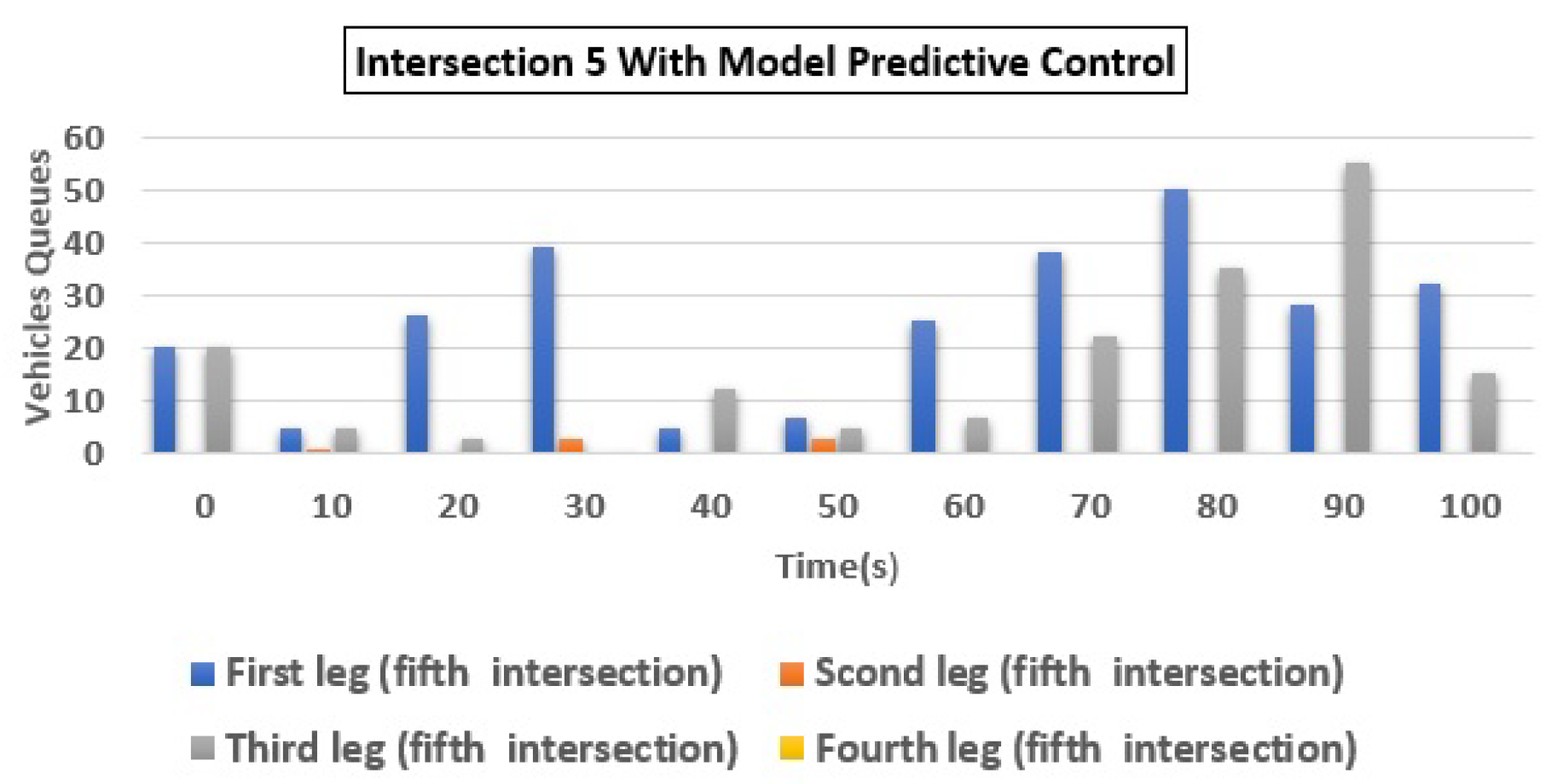
| 5 | (a) Q1 | 150 | 31 | 79.33 |
| (b) Q2 | 32 | 3 | 90.63 | |
| (c) Q3 | 150 | 10 | 93.33 | |
| (d) Q4 | 28 | 3 | 89.29 | |
| Total | 360 | 47 | 86.94 | |
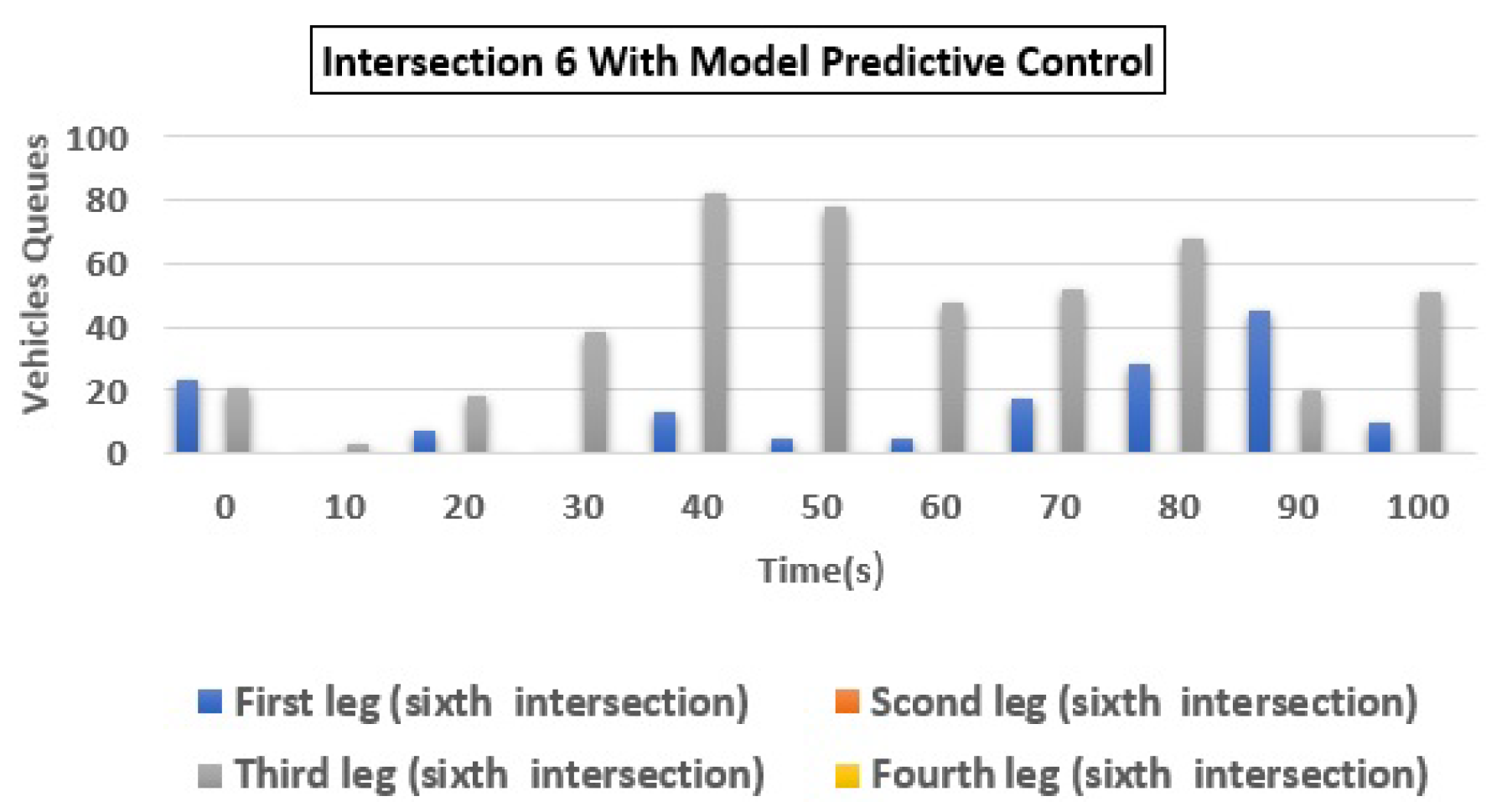
| 6 | (a) Q1 | 175 | 12 | 93.14 |
| (b) Q2 | 32 | 3 | 90.63 | |
| (c) Q3 | 2 | 3 | −50.00 | |
| (d) Q4 | 28 | 3 | 89.29 | |
| Total | 237 | 21 | 91.14 | |
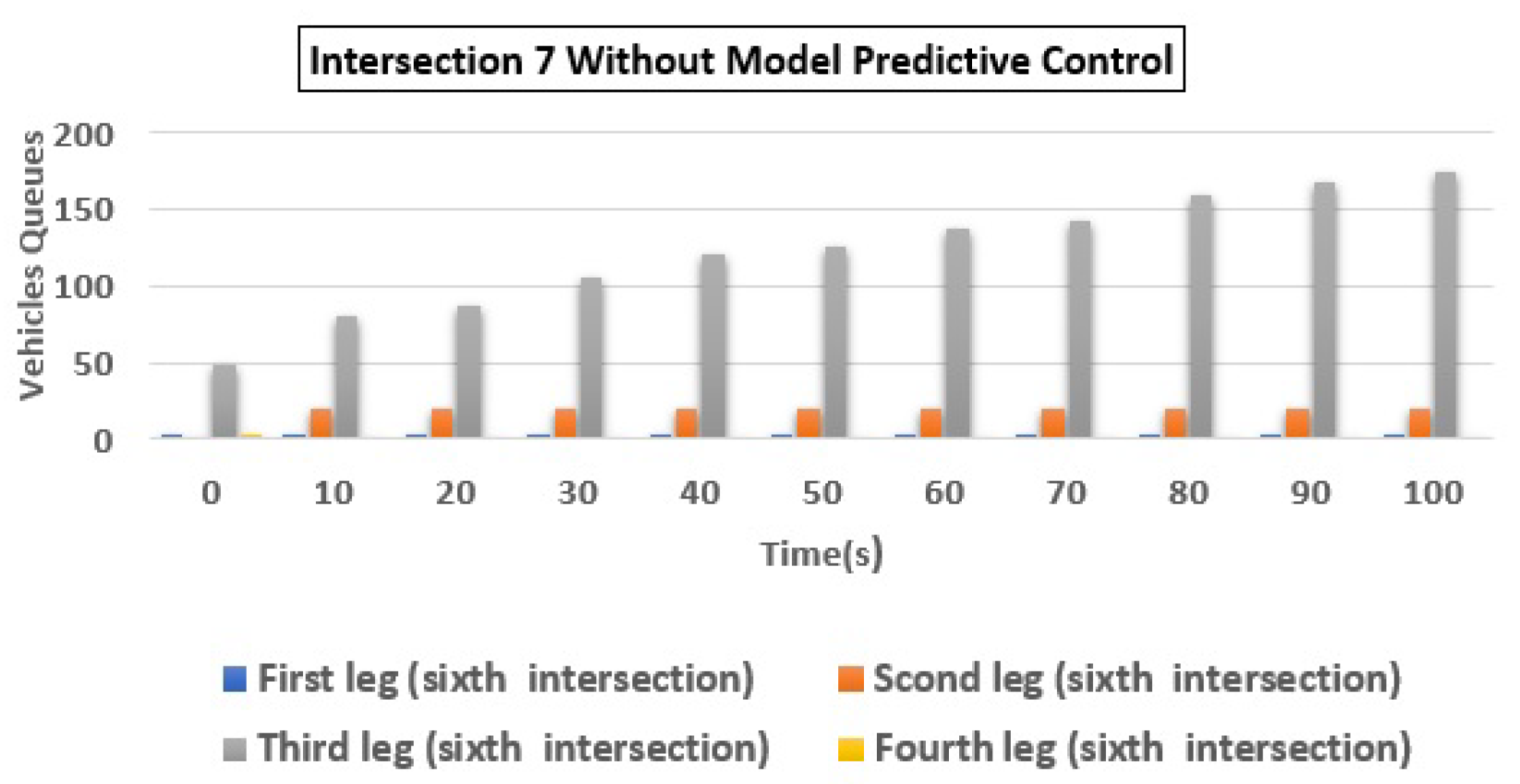
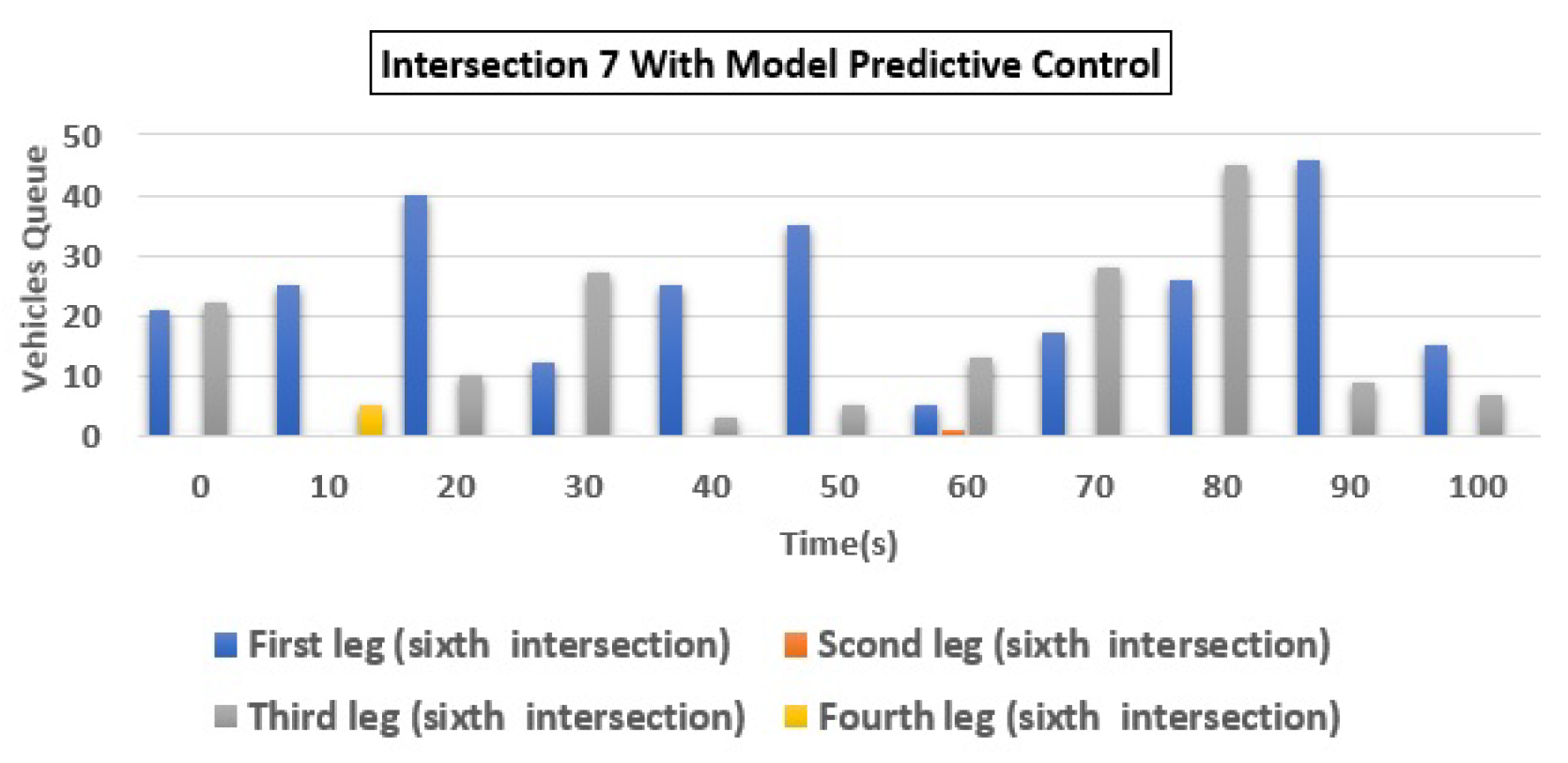
| 7 | (a) Q1 | 3 | 0 | 100.00 |
| (b) Q2 | 20 | 3 | 85.00 | |
| 9c) Q3 | 175 | 7 | 96.00 | |
| (d) Q4 | 3 | 1 | 66.67 | |
| Total | 201 | 11 | 94.53 | |
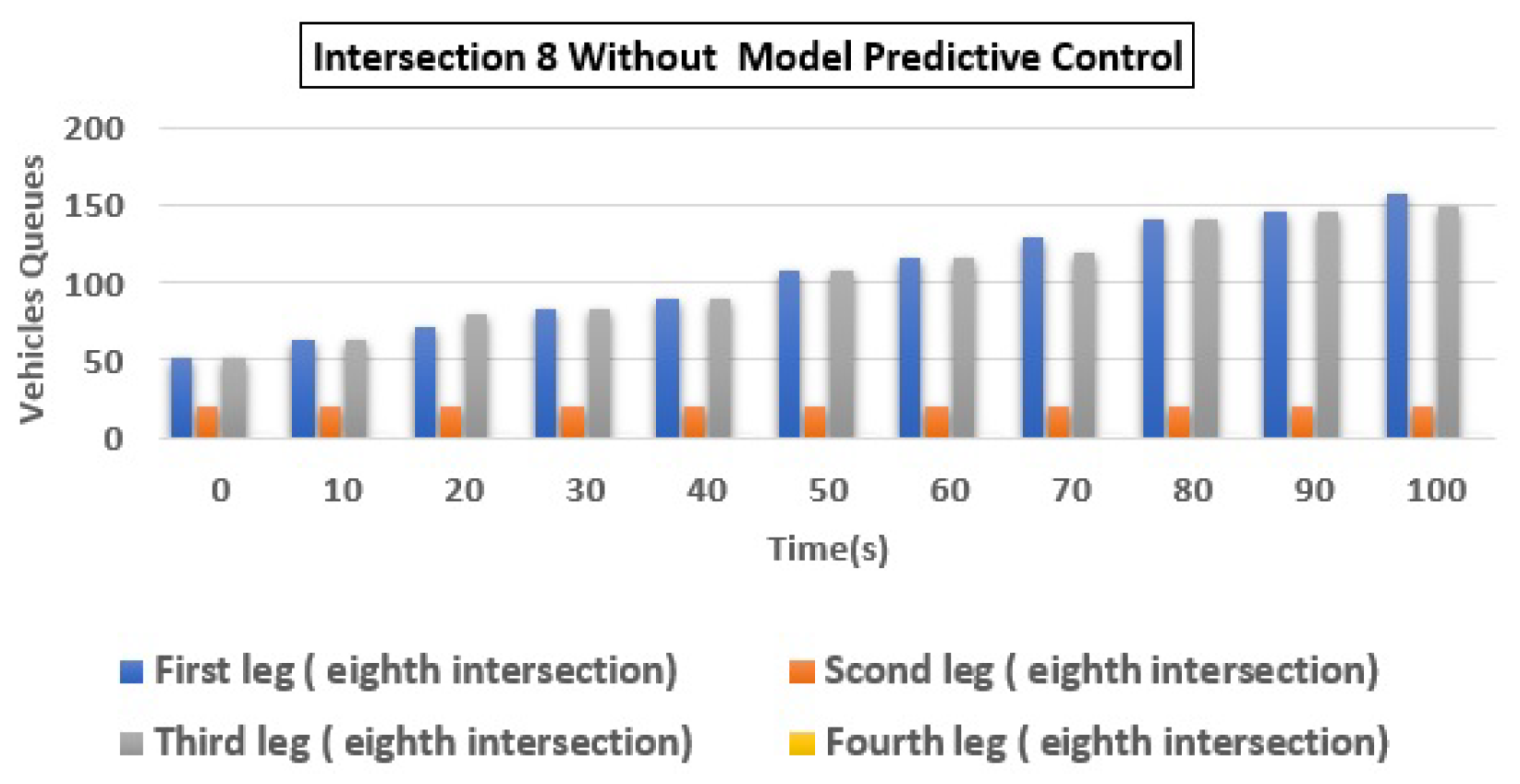
| 8 | (a) Q1 | 175 | 7 | 96.00 |
| (b) Q2 | 20 | 3 | 85.00 | |
| (c) Q3 | 150 | 12 | 92.00 | |
| (d) Q4 | 3 | 0 | 100.00 | |
| Total | 348 | 22 | 93.68 |
| Existing Work | Approach | Benefit | Applied Model |
|---|---|---|---|
| Azimirad et al. [35] | Single intersection | Minimal waiting time and length of queue | Fuzzy Logic |
| Jafari et al. [53] | Single intersection | Optimal traffic and reducing queue length | Model Predictive Control |
| Jiachen Yang et al. [54] | 3 intersection | Significant reduction in delay or various traffic conditions. | Multi-Agent Deep Reinforcement Learning |
| Hyunjin et al. [55] | 9 intersection | Maximize the throughput and efficiently distribute the signals | Deep Q-Network |
| Hongwei Ge et al. [56] | 4 intersection | Adaptive multi intersection signal control | Cooperative deep Q-network |
| Proposed | 8 intersection | Optimal traffic and reducing queue length | Model Predictive Control |
| Author | Model | Queue Length | Sample Time | Limitations | Solution |
|---|---|---|---|---|---|
| Elvira et al. [57] | Macroscopic model | Exit | 250 s | Large scale urban traffic network | Determining queue length, flow crossing and routing decisions |
| Rasool et al. [58] | Integrated formulation and adistributed solution technique | - | 6 s | Urban streetnetworks | Cooperative signal controland perimeter traffic metering |
| Yunp eng et al. [59] | Mutual coordination traffic organization method | - | 40 s | Multiintersection road networks | Traffic organization method method for CAVs road networks |
| Azzedine et al. [60] | Reinforcement Learning based Cooperative | - | 5 s | Traffic signalsystem | Real time and delaytraffic conditions |
| Xiancheng et al. [61] | Model based on swarm intelligence algorithm | - | 90 s | Trafficflow at intersections | Relieving trafficcongestion |
| Proposed Model | Model predictive control with multi-agent | Reducing length queue | 0.1 s | Urban traffic | Relieving traffic congestion and optimization model of intersection traffic signal timing |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jafari, S.; Shahbazi, Z.; Byun, Y.-C. Designing the Controller-Based Urban Traffic Evaluation and Prediction Using Model Predictive Approach. Appl. Sci. 2022, 12, 1992. https://doi.org/10.3390/app12041992
Jafari S, Shahbazi Z, Byun Y-C. Designing the Controller-Based Urban Traffic Evaluation and Prediction Using Model Predictive Approach. Applied Sciences. 2022; 12(4):1992. https://doi.org/10.3390/app12041992
Chicago/Turabian StyleJafari, Sadiqa, Zeinab Shahbazi, and Yung-Cheol Byun. 2022. "Designing the Controller-Based Urban Traffic Evaluation and Prediction Using Model Predictive Approach" Applied Sciences 12, no. 4: 1992. https://doi.org/10.3390/app12041992
APA StyleJafari, S., Shahbazi, Z., & Byun, Y.-C. (2022). Designing the Controller-Based Urban Traffic Evaluation and Prediction Using Model Predictive Approach. Applied Sciences, 12(4), 1992. https://doi.org/10.3390/app12041992