1. Introduction
The widely developed fields of application of virtual reality (VR) technology are mainly medicine, education, and entertainment, but also selected elements of manufacturing processes, robotics, and data visualization [
1]. Particularly noteworthy is training simulated in a 3D environment [
2], and it covers a wide range of activities [
3,
4,
5,
6]. Conducting training in virtual reality (VR) is a flexible and effective method of improving and acquiring skills.
The VR technology solutions are also used in the field of emergency response. The high potential of the technology enables conducting training activities related, for example, to fire fighting. Studies carried out have shown the need to continue work to determine the methods of transferring skills acquired in VR training to real incident scenarios and to assess the potential risks associated with frequent training in an engaging and physiologically-simulating virtual environment [
7]. VR technology allows you to create infinitely large and complex training scenarios, enabling you to take actions that would require vast hardware, financial, and human resources in real life. At the same time, the quality of the training does not differ from that of traditional training [
8]. The results of studies based on both methods showed that trainees preferred 3D visual instruction in virtual reality, while a comparison of the level of training in both groups did not show any difference. Other studies have shown that virtual reality and augmented reality courses have delivered better educational results than traditional training in terms of speed of action, as well as in the number of errors made. It has been found that emergency medical service workers who participated in training increased their skills, in terms of the speed of performance of tasks, by 29% [
9]. The use of the VR-based method for training is particularly applicable in areas where cooperation of human teams in different fields is required, which is associated with high economic costs and a high risk.
Particularly noteworthy is the VR training used in responding to natural and construction disasters and fires [
10]. The use of these methods enables the user’s immersion, building subconscious patterns to be used in the event of crisis situations [
11,
12,
13,
14]. Such arrangements are described in relation to, i.a., the tasks carried out in an accident environment [
15], as well as in relation to the education and training systems implemented by the military sector. [
16,
17] Another user group is customs and police, who are involved in high-risk events [
18,
19].
A strong sense of presence and effective immersion into virtual reality ensure that training is delivered in a secure and controlled environment. Trainees have the ability to prepare and “practice” various topics and sequences, before they take action in real world conditions. This leads to a significant increase in skills, while, at the same time, they take action more confidently and use tools more effectively, enhancing their practical efficiency and reducing possible material or time losses.
However, it is the responsibility of the trainer to educate trainees effectively, without neglecting areas that pose the biggest difficulties when it comes to actions taken. It is particularly important to include elements in the simulation representing threats that the user will encounter in real life, and to assess the risk of their actions depending on the presented threats. A virtual evaluation system that takes the complexity of training in a simulated 3D environment into account is proving to be helpful in assessing learning outcomes.
The following training proposal is aimed primarily at the students of police specialist courses and provides an assessment of the risk of actions taken on the site of a traffic incident, based on a mathematical algorithm implemented for VR training technology. As a result, the trainer receives help in the assessment of students, and the implementation of the exercise in virtual reality makes it possible to improve the efficiency of the training process and to pass knowledge on to students in a manner that is consistent with regulations, standards, and Polish law.
This solution guarantees an objective and repeatable assessment of an officer, which has, so far, been carried out in a discretionary manner [
20] or only focusing on one parameter, such as reaction time [
21]. At the same time, the algorithm enables the creation of original scenarios adapted to the current needs and legal norms, and is characterized by a higher versatility compared to other training systems that are based on a strictly defined scenario. As a result, the trainer gets help in assessing students. The implementation of the exercise in virtual reality allows to increase the effectiveness of the training process.
The described algorithm was created and adapted to the needs of training police officers in the area of road accidents, but the mathematical foundations used enable easy application in training dedicated to emergency services and other types of uniformed services. Expanding the target group will form the basis of further development work.
2. Materials and Methods
The combination of VR visualization with a risk assessment module enables the introduction of a cause-and-effect sequence to a training algorithm. Only the combination of these two elements allows for assessment and thus it is also effective in the training of officers in cases of danger [
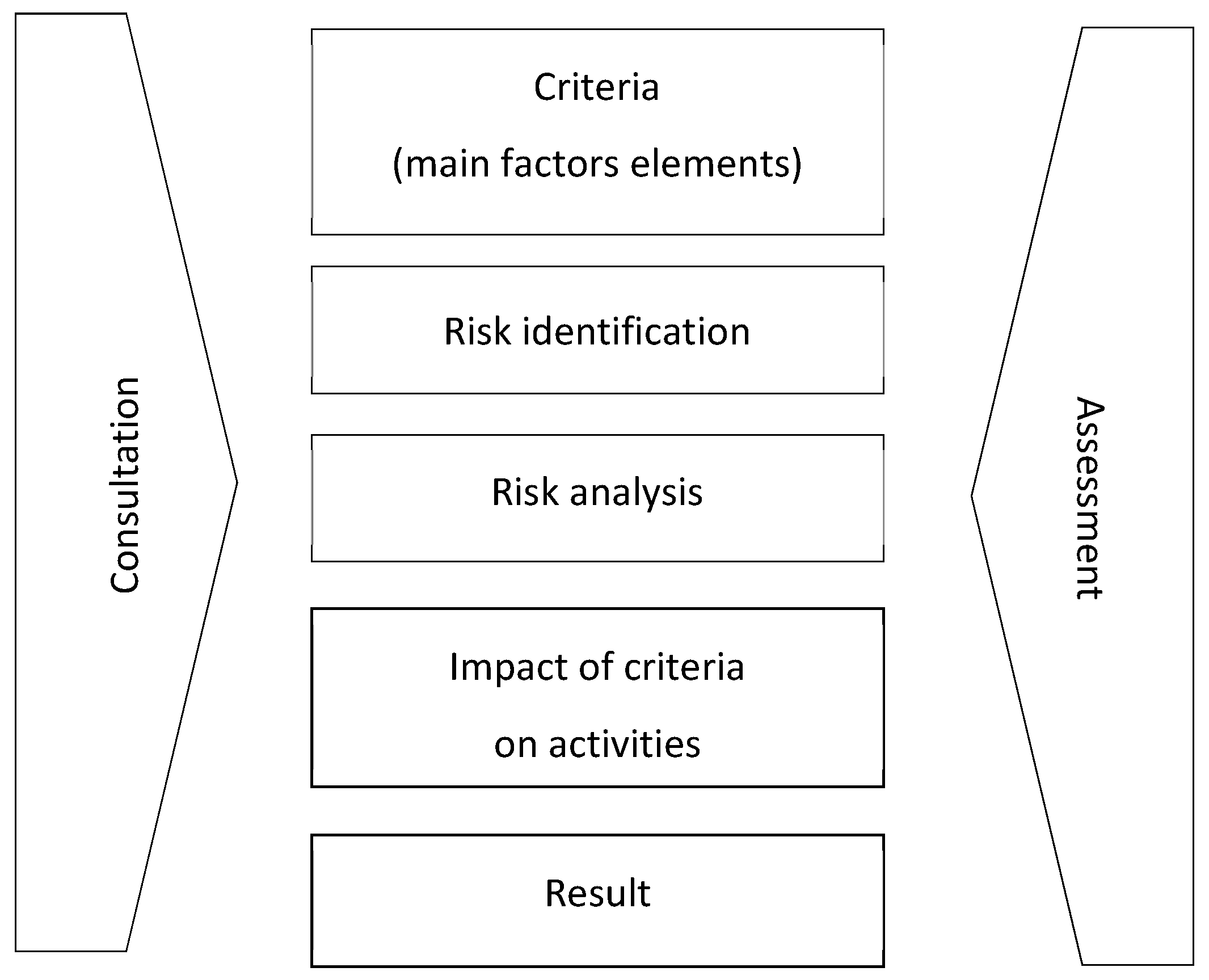
21]. The basis for the development of an appropriate calculation method was the International Standard ISO 31000 Risk Management—Guidelines. In accordance with the standard, risk identification consists in the search, diagnosis, and description of risks and includes the identification of sources of risk, incidents, their causes and potential consequences. This identification is based, among other things, on theoretical information and expert opinions. In risk analysis, an important aspect is the risk criteria, which is the reference framework based on which risk is assessed. Risk criteria can be determined on the basis of requirements, standards, rules, and other necessary dependencies. As part of risk identification, the reasons for a given risk—the risk criteria (factors) are also indicated. Decisions made must be based on assumptions that are safe, meaning without negative consequences. On the other hand, actions should also include certain risky behaviors, but with safety rules in place. This depends to a large extent on the degree of confidence in decision-making. Therefore, a decision that assumes the achievement of a previously set assumption can be considered to be a safe decision.
One of the specific risk factors is the decision-making process. In the issue under consideration, this aspect relates to the consequences of decisions made by a police officer on his/her further actions, i.e., whether a decision made at a given time will contribute to a reduction to, or an increase in, risk.
In the subject issue, the direct implementation of the ISO 31000 guidelines is not possible due to the specificity and complexity of the subject. The development of the algorithm is only based on the standard risk analysis guidelines. The risk diagram for the actions of a police officer on the site of a traffic incident is shown in
Figure 1.
The analysis presented concerns the actions of a police officer on the site of a traffic incident. The risk matrix recommended by the Police Commander in Chief was adopted for this purpose.
The risk matrix model focuses on two aspects:
The level of complexity of the scenario (N), which is related to the way in which each action is performed, depending on the conditions of the execution of these tasks (actions), their number, and it also considers changes in the intensity of a particular factor.
Decision-making according to the priority (P) is an assessment of the decision taken in relation to the actions implemented, taking the priority into account, i.e., the sequence in which they are implemented, also in the context of "changes" of the factors (quantity, intensity) that may be introduced during the simulation, thus generating the need for additional action.
When considering the matrix in mathematical terms, it is the Cartesian product of two sets; for our analysis, it was set P and N. In graphic terms, the risk matrix is a square containing 25 colored boxes (5 × 5). In this algorithm, implemented for VR training simulation, the risk matrix is the final and, at the same time, the key calculation factor. The result is an aid to the trainer in terms of the assessment of a student’s skills. First, the N and P rating (
Table 1) from 1 to 5 should be assigned to the percentage levels obtained: 0–20% (negligible), 21–40% (small), 41–60% (moderate), 61–80% (severe), and 81–100% (catastrophic). The risk assessment should then be “plotted” (
Table 2) at the intersection of the two values. On this basis, the level of risk and, consequently, the student’s skills can be classified and assessed. In the analyzed issue, the matrix interpretation is as follows:
Green—low level
Yellow—medium level
Orange—high level
Red—extreme level
It should be noted that P with a value of 0% refers to a case where a student of specialist police courses performs all tasks in the correct sequence. On the other hand, a value of 100% means that the tasks were not completed or that the participant did not comply with the boundary conditions set by the trainer. For N, a value of 0% refers to the start of the simulation, time 0.00. Each further value up to 20% refers to the least complex scenario, while 100% to the most complex scenario.
The use of a two-dimensional risk matrix is one of the basic ways to determine the danger associated with the performance of a potential activity. The standard solution for this type of project is "Technique for the Order Preference by Similarity to Ideal Solution" (TOPSIS), according to which the best alternative should have the shortest Euclidean path to the ideal solution and farthest from the worst solution [
22]. A solution of this type is optimal in the case of symmetric matrices with dimensions X ×·X, in which we can consider the increase in risk as a linear value. In the proposed algorithm, it would be inappropriate to use this type of solution because in the presented scenario, the tasks have a different level of significance. Thus, the use of the TOPSIS solution would make it difficult to implement a mathematical model that takes the correctness of performing tasks into account, moving in the VR space, and the sequence of performing tasks. At the same time, the mathematical basis of the algorithm, consisting in multiplying the level of risk present in the scenario and the correctness of performing tasks, is popular among this type of application; in modern literature, it is described as the "Singaporean method/model" [
23].
3. Preliminary Activities
This section presents the purpose of work and the input data that were included in the calculation method. The purpose of the work is to support the process of training police officers who take actions on the site of a traffic incident, by assessing the tasks performed and the impact of the decisions made on subsequent actions. In order to develop the calculation method in the most accurate possible way, we had to take all of the factors in the simulation that are necessary for creating scenarios and the hardware capabilities that determine the different options of exercises to be performed in VR into account. In our work, we consider the factors that make up the visualization of the simulation, creation of a scenario, e.g., circumstances, legal status, actions, lack of action, external and internal events, and other conditions that may or may not affect the risk of irregularities. The factors that influence the scenario are expressed on a three-point scale, where 1 is the factor posing an average difficulty during training, 2—average, and 3—the greatest difficulty. The categories of factors (main factors) are: road infrastructure, weather conditions, number of vehicles, injured persons, ADR (vehicle carrying dangerous goods), and others (e.g., traffic volume, time of day). The possibility of changing the "intensity" of certain factors, e.g., fogging (from 0%—low level to 100%—high level), has been taken into account. Each main group of factors includes a sub-group consisting of a comprehensive list of elements, such as a passenger car, one-way road, and a track of friction on the road surface. These have been assigned specific points (so-called weights). This has a significant impact on increasing the difficulty of the simulation (scenario) and can ultimately affect the final assessment of the entire training. In addition, we assumed that the total of the individual weights is 1 (100%).
In our method, we also took the tasks (exercises) developed under Order No. 30 of the Commander in Chief on road services into account, which the student of the specialist police courses must perform. This has enabled us to verify not only which tasks must be performed, but also in what sequence. Taking all the possibilities of creating simulations into account, we have identified a variant where there is a traffic accident involving a vehicle carrying dangerous goods (ADR).
The transport of dangerous goods (ADR) and events involving them are a specific case foreseen during training. Dangerous goods are objects and substances that can only be transported under certain circumstances, in accordance with specific regulations. The European Agreement for the International Carriage of Dangerous Goods by Road contains detailed provisions issued every two years by the United Nations Economic Commission for Europe. The transport of such goods carries a high risk during a potential accident. In particular, in the case of dangerous goods, there is a risk of fire, explosion, chemical burn, poisoning, or environmental damage. Products covered by the ADR are divided into 9 main groups with subgroups (
Table 3).
For training purposes, it is assumed that these groups of substances are defined by a 3-level harmfulness scale, where 1 is low harmfulness, 2 is medium, and 3 is high harmfulness. During training, a traffic incident involving a vehicle transporting ADR goods presents a serious risk as the tank may leak and the released substance may change its properties under weather conditions, for example, rain. As a result, this leads to an even greater danger.
In addition to the risks arising from the transport of dangerous substances, there is also an aspect related to the possibility of the release of the substance outside. In addition, weather conditions, for example, precipitation, may alter the properties of the released chemicals. Additional conditions that matter are: visibility, air temperature, summer time, winter time, cloudiness, rain, fire.
An incident involving a vehicle carrying an ADR load involves the so-called "endangerment of student’s life" introduced in the simulation. This is due to the fact that the student must maintain the highest safety measures during simulation (including approaching the load from the leeward side, an attempt to determine the type of substance, etc.). The degree of risk to the student’s life takes only two values—0 or 100, where 0 means that the life and health of the student is at risk, the student is in a danger zone, has come into contact with a harmful substance. The simulation is therefore terminated. The value of 100 refers to a situation where there is no risk to life and health and the simulation can be continued.
Under Polish law, the actions carried out by a police officer on the site of a traffic incident are specified in Order No. 30 of the Police Commander in Chief of 22 September 2017 (Journal of Laws of the National Police Headquarters No. 64, as amended). First aid means that a person on the site of a traffic incident assists an injured person. Typically, aid is provided by a person who is not an expert but a trained person—in this case, a police officer who arrives at the scene of the accident and assesses the situation and provides assistance.
If necessary, the police officer must provide first aid to an injured person. Pre-medical aid is based on the ABC scheme, which means: compression—restoration of blood circulation, airways; clear the airways, breathing.
Immediate recognition of cardiac arrest is necessary to begin CPR as soon as possible. CPR means cardiopulmonary resuscitation. This procedure is a collection of interventions that are carried out to provide oxygen and circulation in the body during cardiac arrest. The technique described is intended for an adult victim in non-hospital conditions [
24].
In the case of a number of victims of the accident who are in different conditions, the procedures based on the TRIAGE segregation shall apply. The following breakdown has been applied:
Red flag—patients need immediate care,
Green flag—identifies patients who have received the second evacuation priority,
Yellow flag—patients have been given the third evacuation priority,
Black flag—deceased.
This means that if a scenario during training involves several injured people, "marked" in red, yellow, and green, the trainee should give first aid to the person who was assigned to the red group. In addition, under these assumptions, an appropriate weight can be assigned:
red—3
green—2
yellow, black—1.
4. Algorithm
The assessment of the risk of actions taken by the students of police specialist courses on the site of a traffic incident is based on a mathematical algorithm implemented in the training VR technology. The method of calculating a virtual assessment of the student’s behavior takes two main aspects into account. The first concerns the assessment of the actions carried out. This value consists of performing tasks as well as performing them in the correct sequence. To verify the sequence, the so-called priority of tasks is applied. This allows you to give the same priority to several different tasks. Due to such a procedure, for example, tasks related to providing aid to multiple injured people with the same health condition (color) are given the same priority. This releases the student from the ethical responsibility during the segregation of victims. The verification of the execution of tasks in the system is carried out by marking: "completed task" and "uncompleted task". The system assigns number one to a completed task, and zero to an uncompleted task. Another component of the first aspect is the virtual life of the officer during a simulation involving a dangerous substance (ADR). In our work we assumed that the student cannot stay in an ADR-contaminated area when performing the tasks. Otherwise, the simulation will be aborted. To help others, the officer must stay safe.
The second aspect concerns the complexity of the scenario. The trainer must select factors from the system list when creating a virtual training environment. Whether or not a scenario is difficult to carry out depends on the quantity of these factors and their level of impact. With such diversification, the trainer, when creating a scenario for a group that is more or less advanced, gets information from the system about the difficulty of the scenario.
The risk of actions of the officer on the site of a traffic incident is calculated as an instantaneous value for the given simulation moment, t. This allows us to identify elements that are the most problematic for students already in the course of the training. The final risk consists of the risk of actions of the officer during a traffic incident (R) and the assessment of the trainer (OI). The value of 0.4 or 40% of the final risk assessment refers to the assessment calculated by the algorithm and the value of 0.6 refers to the trainer’s assessment, which represents 60% of the Rk assessment. This breakdown results from the fact that the trainer decides on the satisfactory completion of the training in the presented training, and only the trainer can evaluate non-standard tasks, such as the trainer’s interview with the student. The equation describing the final risk is set out below:
where R
k—final risk of actions of the officer on the site of a traffic incident, O
I—trainer’s assessment, and R—risk of actions of the officer on the site of a traffic incident.
The R-parameter in Equation (1) is defined as the product of the probability of rational action and the level of difficulty of the scenario is characterized by Equation (2)
where R—risk of actions of the officer on the site of a traffic incident, P—probability of rational action taking, and N—level of complexity of the scenario.
The risk of actions of the officer on the site of a traffic incident (R) includes the probability of rational action taking during training in virtual reality and the level of complexity of the scenario created by the trainer.
The level of complexity (difficulty) of the scenario is made up of the so-called main factors. These were selected on the basis of experience of police officers from road traffic to include the most important elements influencing the training process in virtual reality. In mathematical terms, this is the product of a given factor and its assigned expert weight. We selected seven main factors (
Table 4), which consist of elements with their relevant expert weights.
The formula that determines the level of complexity of the scenario (N) is shown below:
where N—level of complexity of the scenario, X
D—“road infrastructure” factor, X
W—“weather conditions” factor, Y
L—“number of vehicles” factor, Y
O—“injured persons” factor, Y
a—“ADR” factor, Y
T—“tracks” factor, and X
I—“other” factor.
The training is based on different variants of scenarios. The main factors and elements are specific and differentiated "parameters" and, therefore, the main factors are divided into the following groups:
Group I—road infrastructure, weather conditions, other;
Group II—traces;
Group III—number of vehicles, injured persons, ADR.
The difference between the groups refers to the method of calculation.
Group I is determined on the basis of Equation (4), which is the product of the sum of the weights of the individual elements present in the scenario and the product of the number of those elements and the highest weight, i.e., 3.
where X
i—the value dependent on the given factor, x
i—the individual weights of the elements of the factor and x
i є
, and n—the quantity of the elements of the factor.
Group II is characterized by Equation (5). As in the previous case, the weights and the number of individual elements are present.
where X
i—the value dependent on the given factor, x
i—the individual weights of the elements of the factor and x
i є
, and n—the quantity of the elements of the factor.
Group III calculations take into account the weights of the individual elements and their number, as shown in the following dependency:
where Y
i—the value dependent on the given factor, y
i—the individual weights of the elements of the factor and y
i є
, and n—the quantity of the elements of the factor.
This group also includes the specific case of a traffic incident involving ADR. As mentioned earlier, weather conditions may affect the properties of certain chemicals. This issue also needed to be taken into account in the algorithm. The formula takes the weight of the element of weather conditions and the level of harmfulness of the transported material into account. This is shown in Equation (7).
where Y
i—the ADR-dependent value, ai—the individual weights of the elements of the factor (dependent on weather conditions) and a
i є
, n—the quantity of the elements of the factor, and S—harmfulness of a given ADR.
The issue of endangerment of the life of the officer is directly linked to the ADR issue. While performing their tasks, specialist police course students must maintain specific safety standards, although it may happen that they will be in the danger zone. This situation also needs to be included in the simulation. The degree to which the life of the officer is endangered is described in the following equation:
where L—the degree to which the life of the officer is endangered (0 or 1), l—the value 0 or 100, where the first value relates to the situation in which there was a contact with a hazardous substance and the life of the officer is endangered. The value of 100 means that there is no threat to the life and health of the officer.
The second component of the algorithm refers to the assessment of rational action taking (P
1), which consists of the task performance assessment (O
z) and the assessment of the performance of the task with due priority (O
P). In addition, the assessment of rational action includes two important things. The first is the completion of the task and the second is the sequence of tasks. Both issues have the same level of importance. The calculation is based on the following formula:
The parameters Oz and OP present in the formula are described in Equations (10) and (11).
The task performance assessment covers the number of tasks performed by the officer and the total number of tasks in the scenario to be performed.
where O
Z—task performance assessment, C
I—number of tasks performed by the officer, and c—total number of tasks in the scenario during the simulation.
The assessment of performance of the task with due priority refers to the sequence of tasks to be performed by the officer and is based on the assignment of relevant priorities to the tasks. A situation where there are several tasks with the same priority is acceptable. This allows you to give the same priority to several different tasks, for example, tasks 1 to 5 can have priority 1, and 6 to 10 can have priority 2. It is not important in what sequence tasks 1 to 5 will be performed. It is important that tasks 6 to 10 are not completed before them. This allows you to create groups of tasks with the same level of importance. The O
P assessment is calculated based on the number of tasks performed in the correct sequence (G
I) and the total number of tasks performed during the simulation (g).
where O
P—assessment of the correctness of the performance of tasks according to the specified priority. G
I—the number of tasks completed in the correct sequence by the student, and g—the total number of tasks in the scenario.
The probability of rational action taking takes the degree to which the life of the officer is endangered (L) and the assessment of rational action taking (P
1) into account, as set out below:
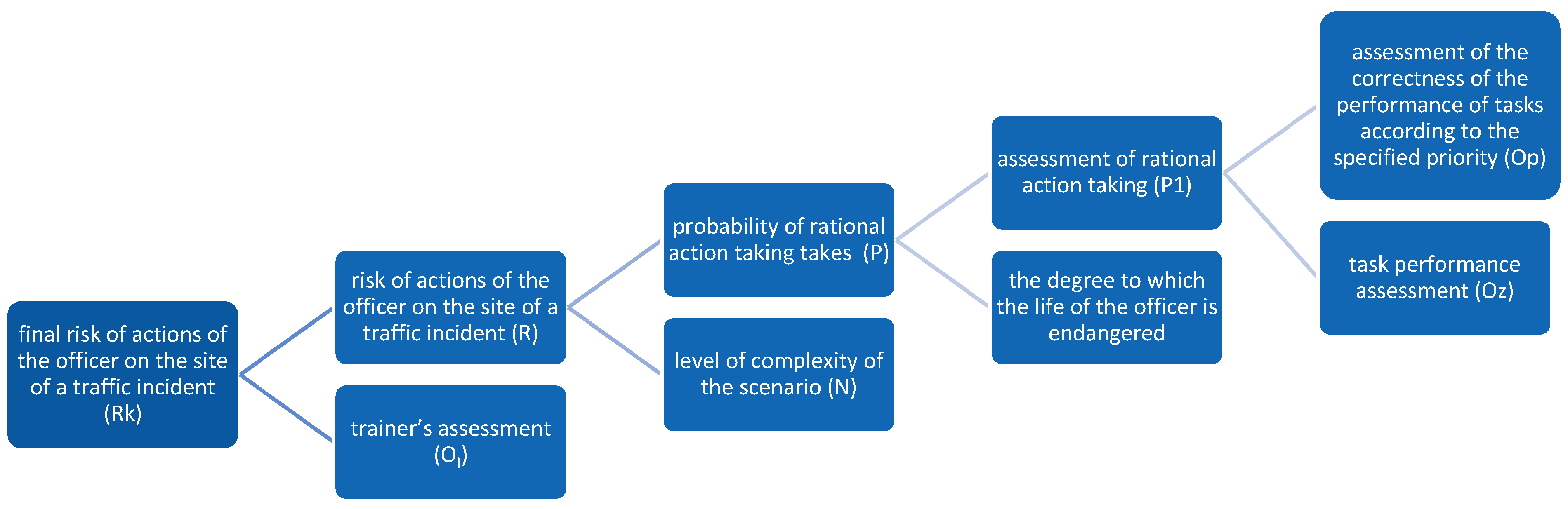
Based on results obtained P and level of complexity of the scenario N, you can obtain data that allow you to determine the risk level based on the risk matrix (
Table 1 and
Table 2). The mathematical algorithm for risk assessment of police officers in VR training simulations is illustrated in
Figure 2.
5. Algorithm Test
The diagram of the calculation of the risk assessment for actions taken on the site of a traffic incident has been tested. For test scenarios, it is assumed that the level of difficulty will vary. In addition, the possibility that the task is performed incorrectly, without compatibility with its priority, i.e., without maintaining the proper sequence, has been introduced. The diversification of scenarios allows you to define a wider range of algorithm functionality, while showing how many components affect the comprehensive course of the training.
Graphs of the probability of rational action and time have been drawn up on the basis of the results obtained. Then, based on the risk matrix, the level of risk that reflects the trainee’s skills has been assessed.
Below is an overview of the three test scenarios and the results of the performed tests (
Table 5,
Table 6 and
Table 7).
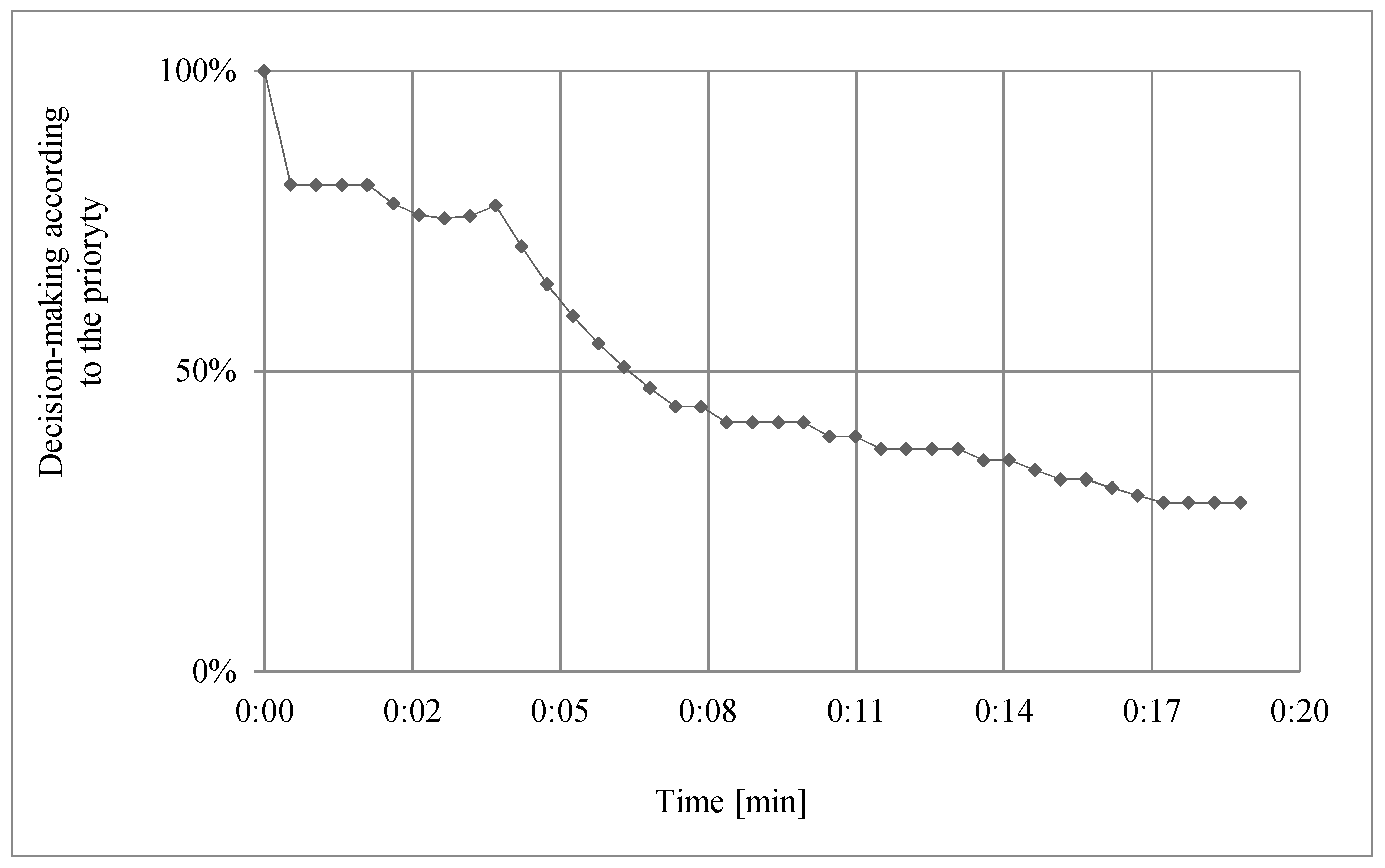
The complexity level of scenario 1 was 63% (value 4,
Table 1). During training, the student was required to perform 25 on-site activities in the correct sequence. The result achieved is the performance of all tasks, with the note that in the first minutes of the simulation, two tasks were performed outside the correct sequence; this is illustrated in
Figure 3. Further actions were carried out in line with the relevant procedures, and the curve decreases over time. The final result of the probability of rational action taking is 28% (value 2).
By placing values 4 and 2 in the risk matrix, the final result at the level of 8 is obtained (yellow,
Table 2).
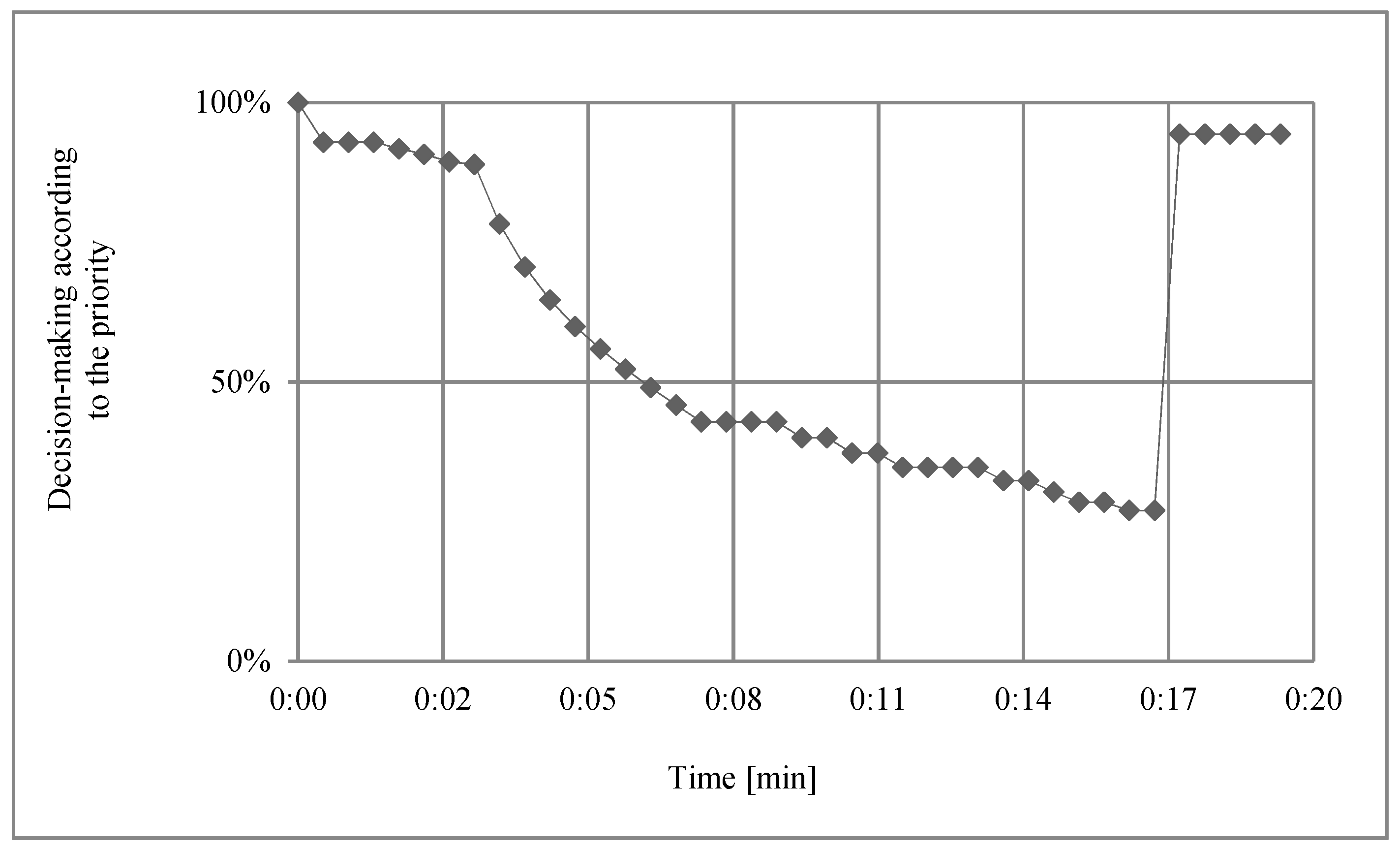
In scenario 2, an additional factor was introduced in the form of a vehicle carrying ADR (
Table 6).
The complexity level of scenario 2 was 73% (
Table 1).
Figure 4 presents the test results. During the training, the officer was required to carry out 30 activities on the site of the traffic incident in the correct sequence. Twenty-four tasks were performed, four of which were performed incorrectly, and six tasks were not performed. Because during the simulation, the officer was in a life-threatening zone, the training was aborted. The situation occurred in the 17th minute of the training. This is shown in the graph as a sudden increase of P. The final result of the probability of rational action taking is 97%.
Based on the risk matrix, a final score of 20 is obtained (red,
Table 2).
When preparing scenario 3, the participation of an unprotected person, i.e., a cyclist, was taken into account (
Table 7).
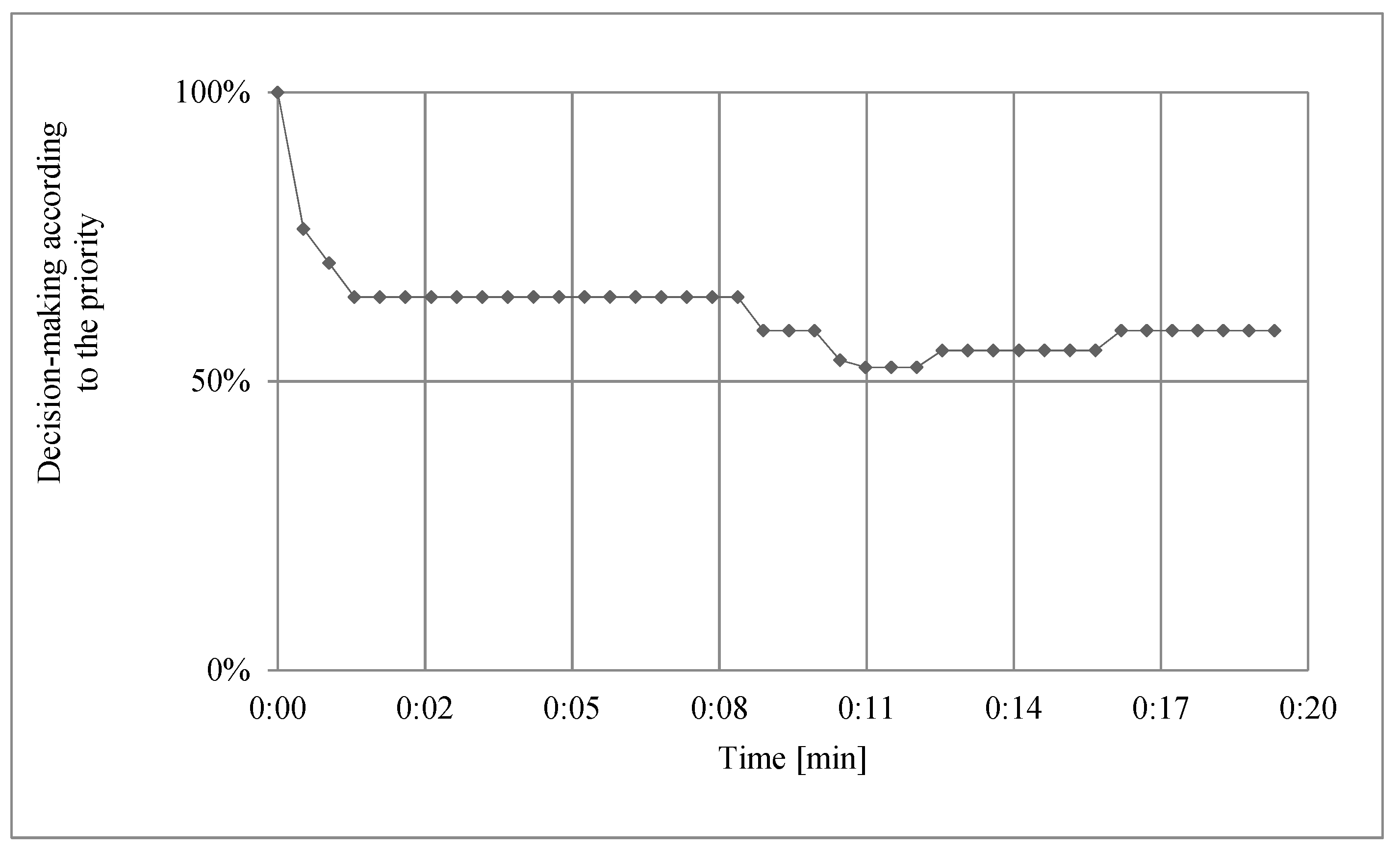
The complexity level of the scenario was at 75% (
Table 1). The test results are shown in
Figure 5. The training system assumed 15 activities to be performed in the appropriate sequence. The participant performed nine tasks, one of which was performed in the wrong sequence. In addition, this task has not been carried out for the entire duration of the training. Virtually for the entire training period, the value of P was above 50%, reaching a high level.
The risk assessment based on the risk matrix is 12 (orange,
Table 2).
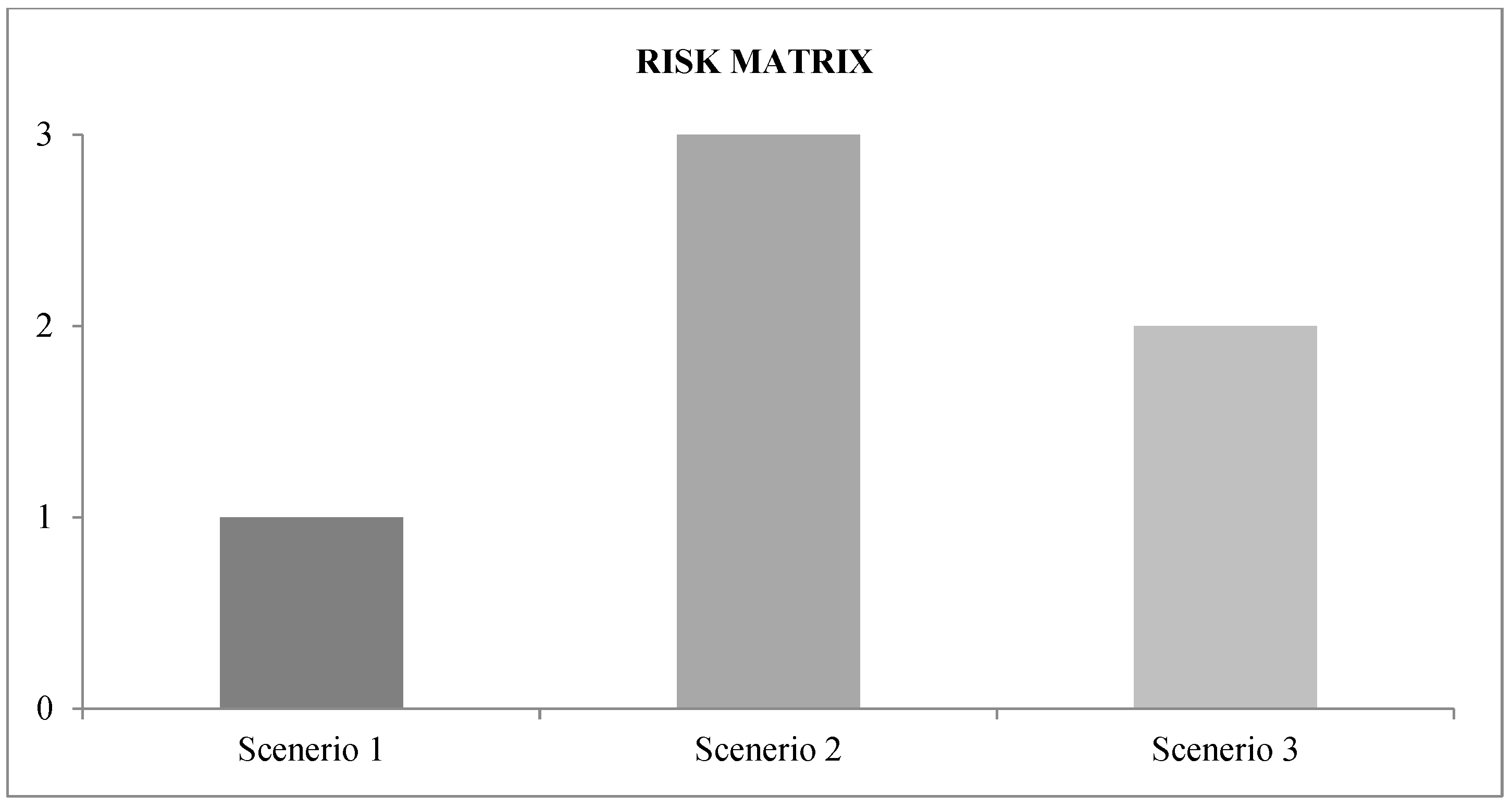
Figure 6 summarizes the risk level results for the three test scenarios, interpreted based on the risk matrix. The level of complexity of a given scenario does not always imply an increase in risk level assessment; an example is scenario 3. The same is true for the number of tasks.
Results of the simulations performed show that the algorithm developed is suitable for different types of scenario complexity, different tasks, and different sequence of activities, with any simulation duration. It also takes any changes to the simulation that are made in its course into account. Thanks to such an approach, the trainer can monitor the level of difficulty of the scenario on an ongoing basis, and therefore, verify the performance of tasks by the trainee. In addition, this is a helpful tool to increase the level of training.
In the future, the solution presented can serve as a basis for analyzing different types of scenarios with the same level of difficulty, which is very important in the process of training officers on the site of a traffic incident.
In addition, after several simulations with the same tasks, the trainer will be able to identify the tasks which are the most difficult for officers, and in the future, pay particular attention to these aspects in the training process in order to improve the efficiency of the activities on the site of a traffic incident. The use of an algorithm evaluating student behavior under certain conditions during virtual reality training may make it possible to conduct training without the presence of supervisors.
6. Conclusions
This article presents a calculation algorithm assessing the skills of students of police specialist courses in a VR environment. It defines both the level of difficulty of the scenarios developed and the assessment of the activities performed by the student during the simulation. This calculation method can be used for different types of training simulation, whether police, medical, firefighting, or production simulations. The results of the developed algorithm are very promising, but, in the future, we intend to test more scenarios to minimize the possibility of irregularities and to contribute to the improvement of the algorithm developed. The developed algorithm makes it possible to use it in VR simulations concerning other situations that threaten the life and health of officers. The proposed algorithm can be implemented in training courses in the field of operations in hazardous or contaminated areas. This solution would be particularly profitable for emergency services operating in refineries and other chemical industry centers. Moreover, the mathematical basis of the algorithm allows for easy adaptation of training to the needs of fire brigades as well as police rapid response units. The next stage of development will be to extend the algorithm with further scenarios of events in which police officers can take part. The developed algorithm gives very promising results, but, in the future, we intend to test more scenarios to minimize the possibility of an irregularity and contribute to the improvement of the developed algorithm.


 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}