
Research on the Flow and Transmission Performance of Magnetorheological Fluid between Two Discs


Abstract
:1. Introduction
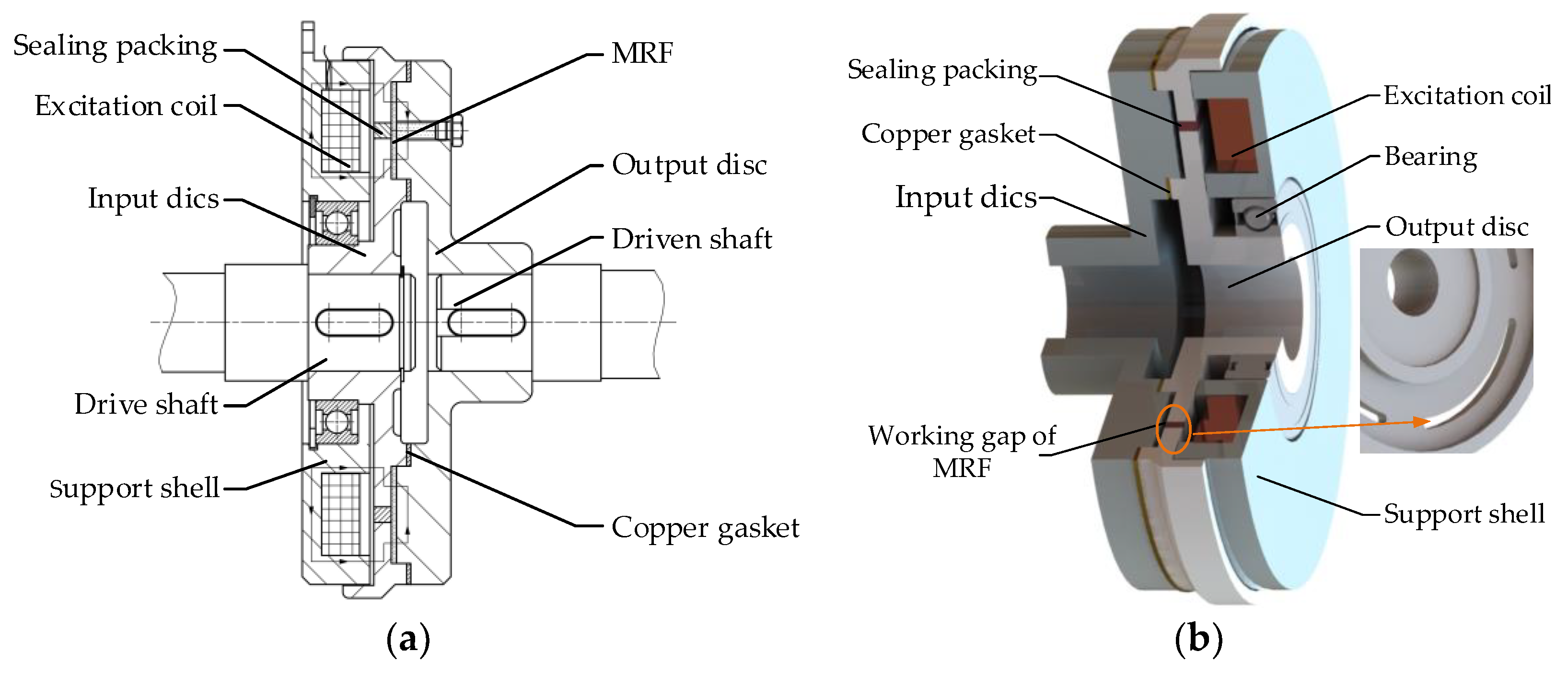
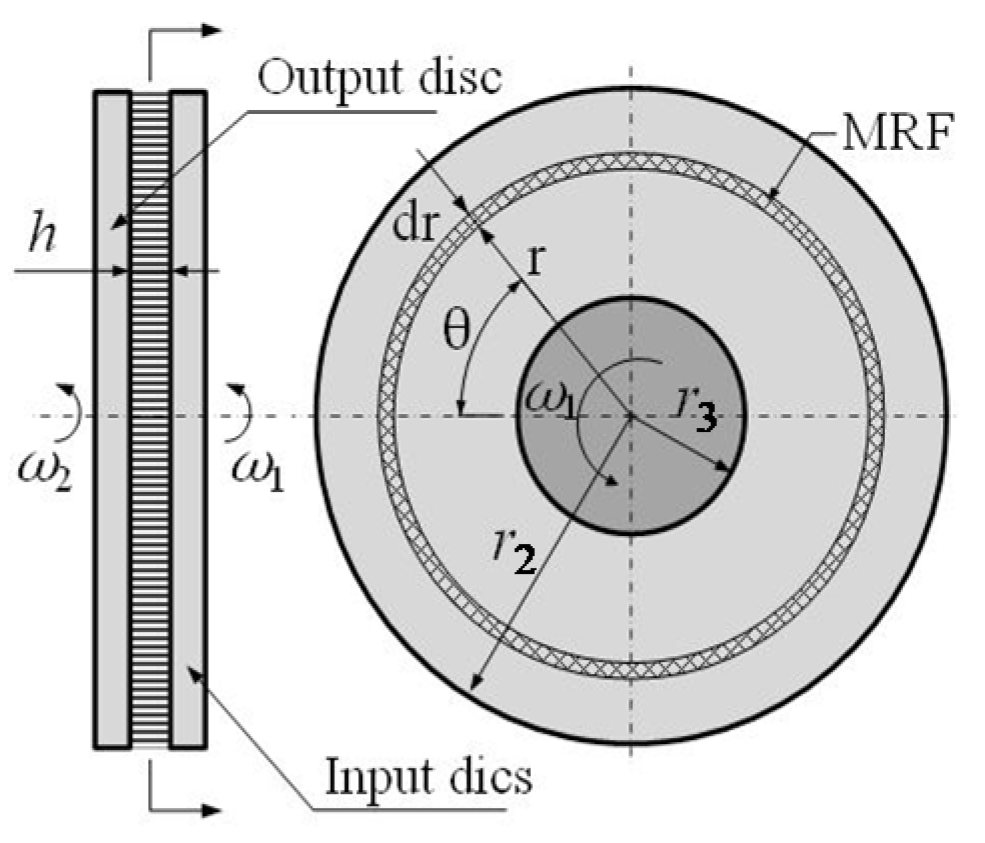
2. Design of an MR Transmission Device
- (1)
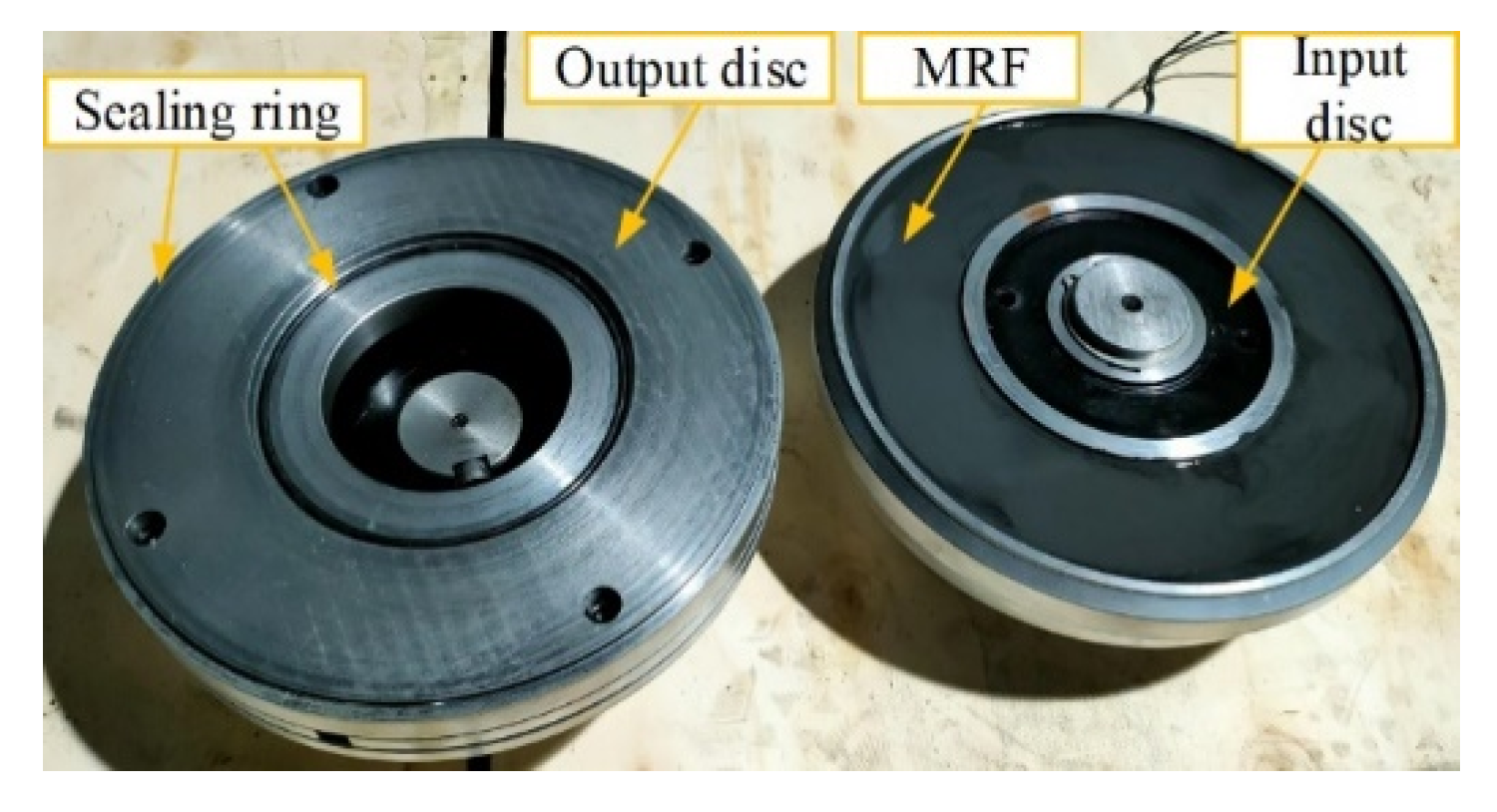
- In the initial state, the drive shaft starts to rotate under the action of the input torque from the power source. At this time, the excitation coil is not energized, and the torque transmitted by the zero-field viscosity of the MRF alone is not enough to drive the output disk to rotate.
- (2)
- After the excitation coil is energized, the magnetic flux generated by the coil passes through the gap of the MRF perpendicularly, the magnetic particles in the MRF are arranged into a chain structure along the magnetic flux direction, and the shear yield stress gradually increases, driving the output disk to start rotating. When the current increases, until the MRF reaches magnetic saturation, the device transmission torque reaches the extreme value and the driven-disc rotation remains stable.
- (3)
- In the event that the system needs to stop the power input, the coil is disconnected, and the shear yield stress of MRF decreases rapidly. Finally, the input disk and the output disk are disconnected, and the output disk stops rotating.
3. Analysis of Torque Performance
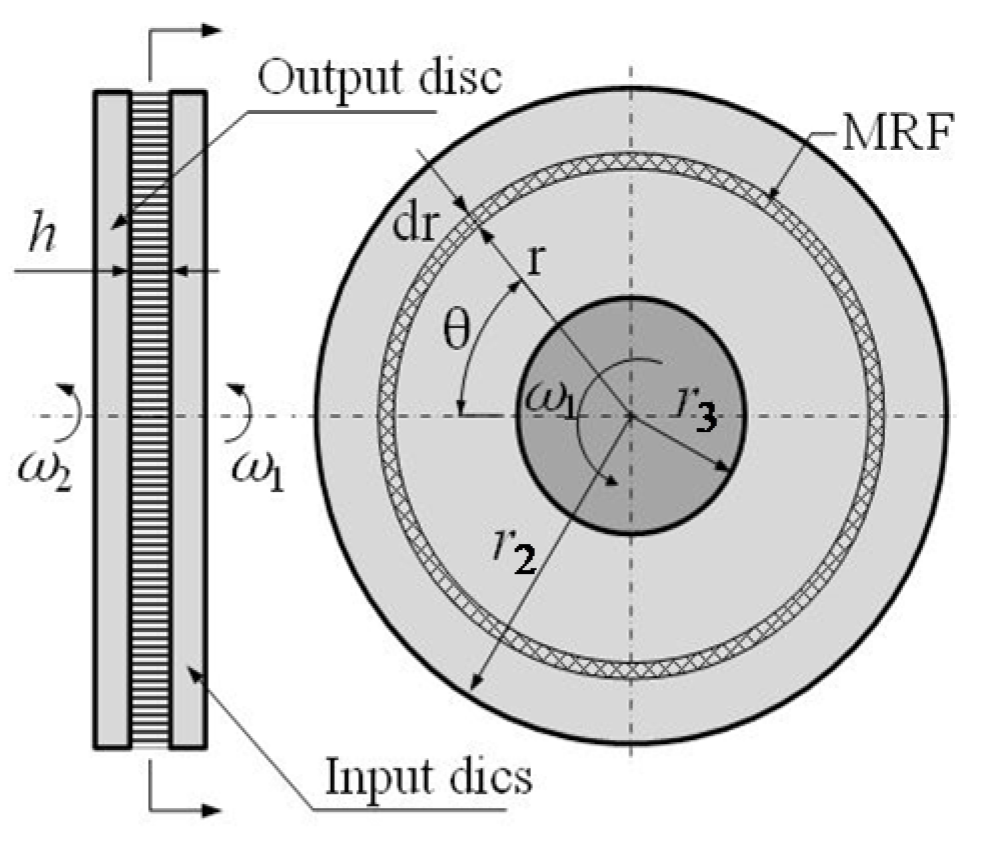
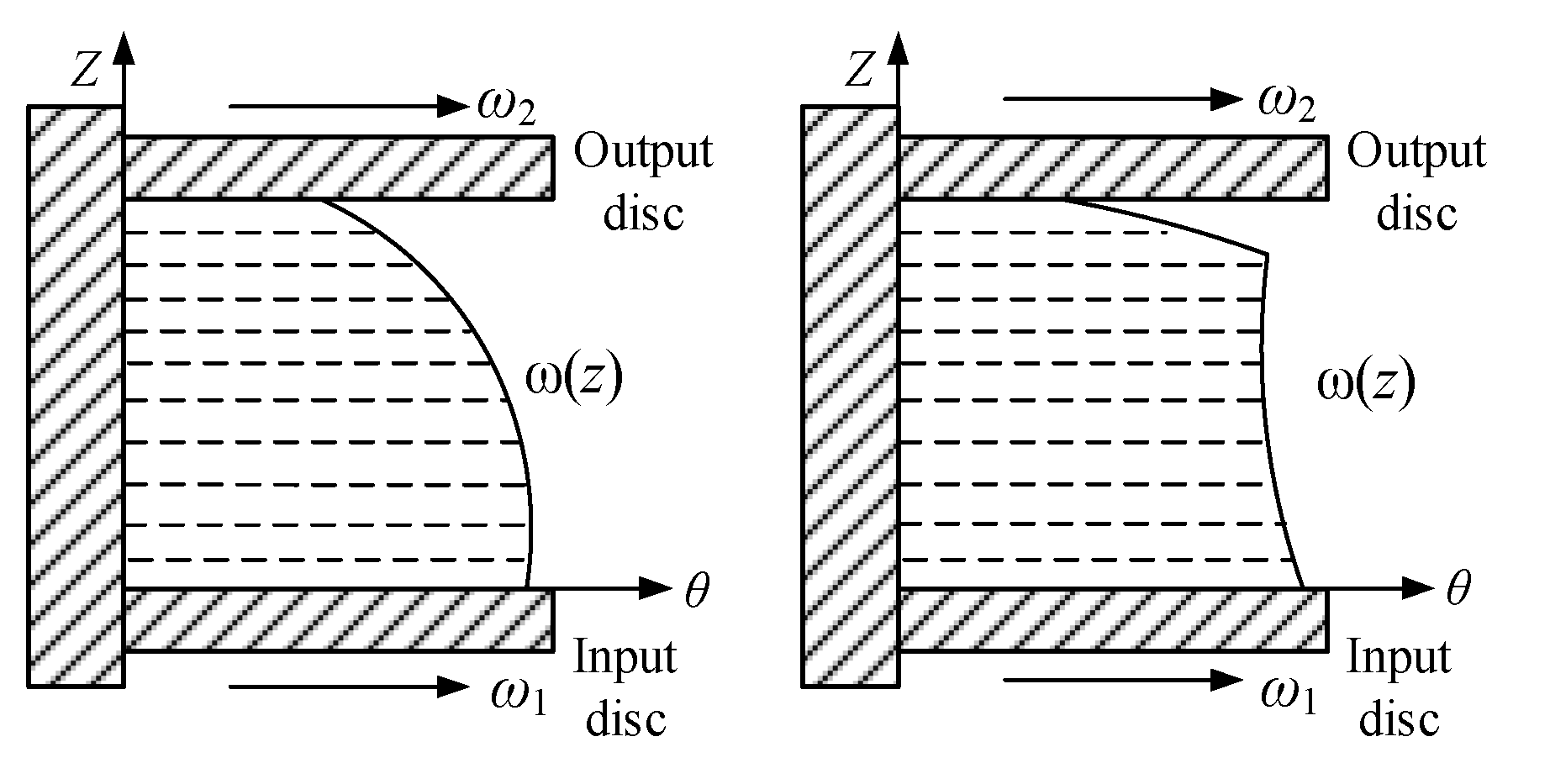
3.1. Analysis of MRF Flow
3.2. Analysis of Torque
4. Design and Analysis of Magnetic Fields
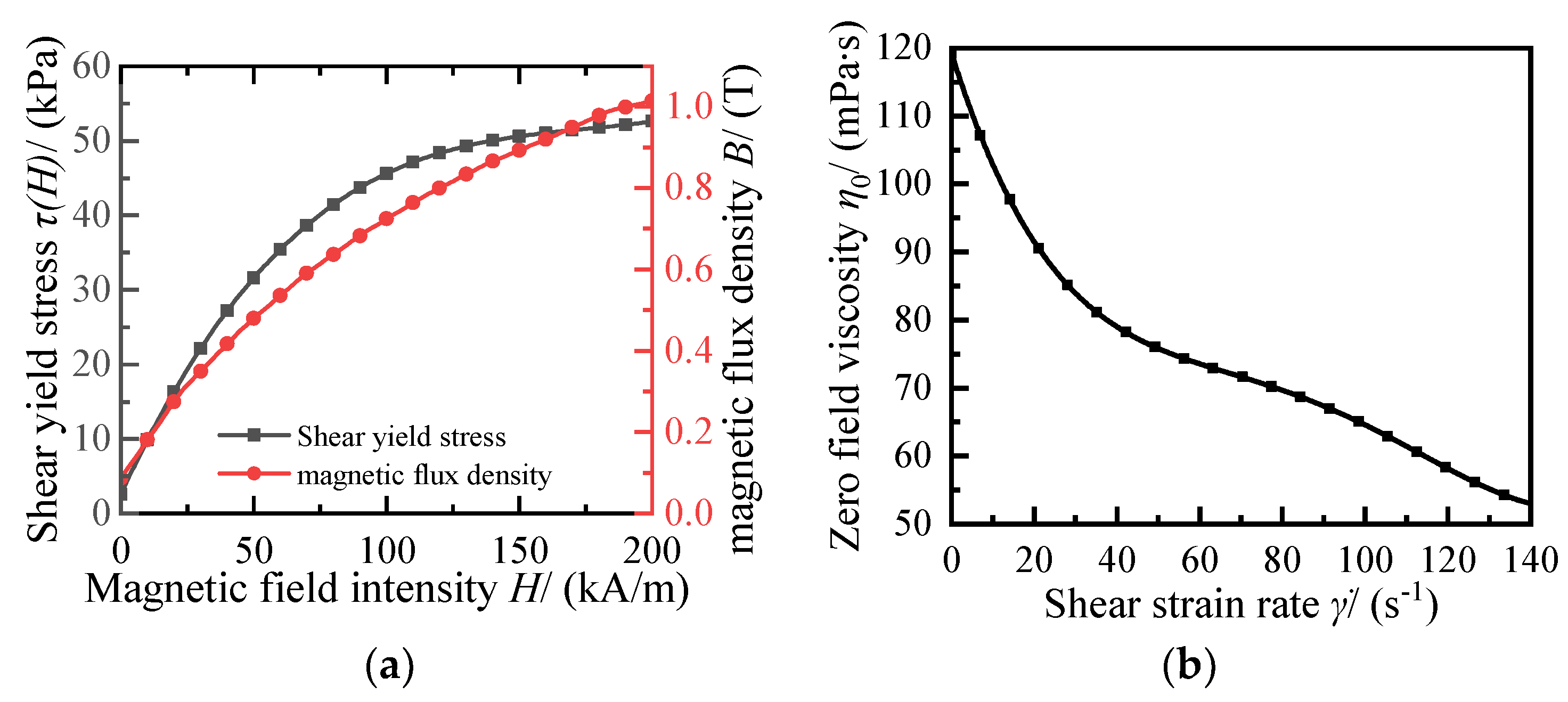
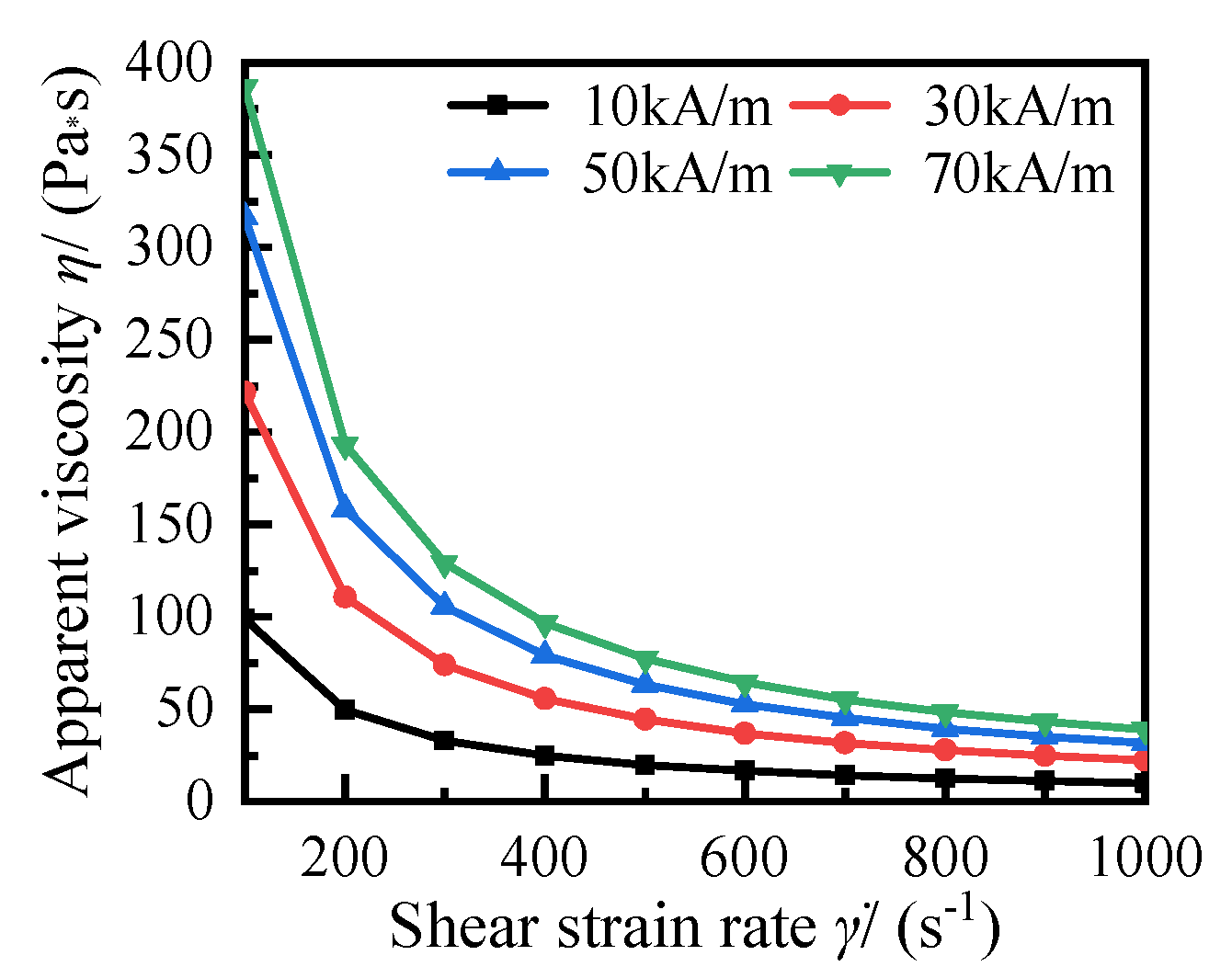
4.1. Magnetorheological Fluid Properties
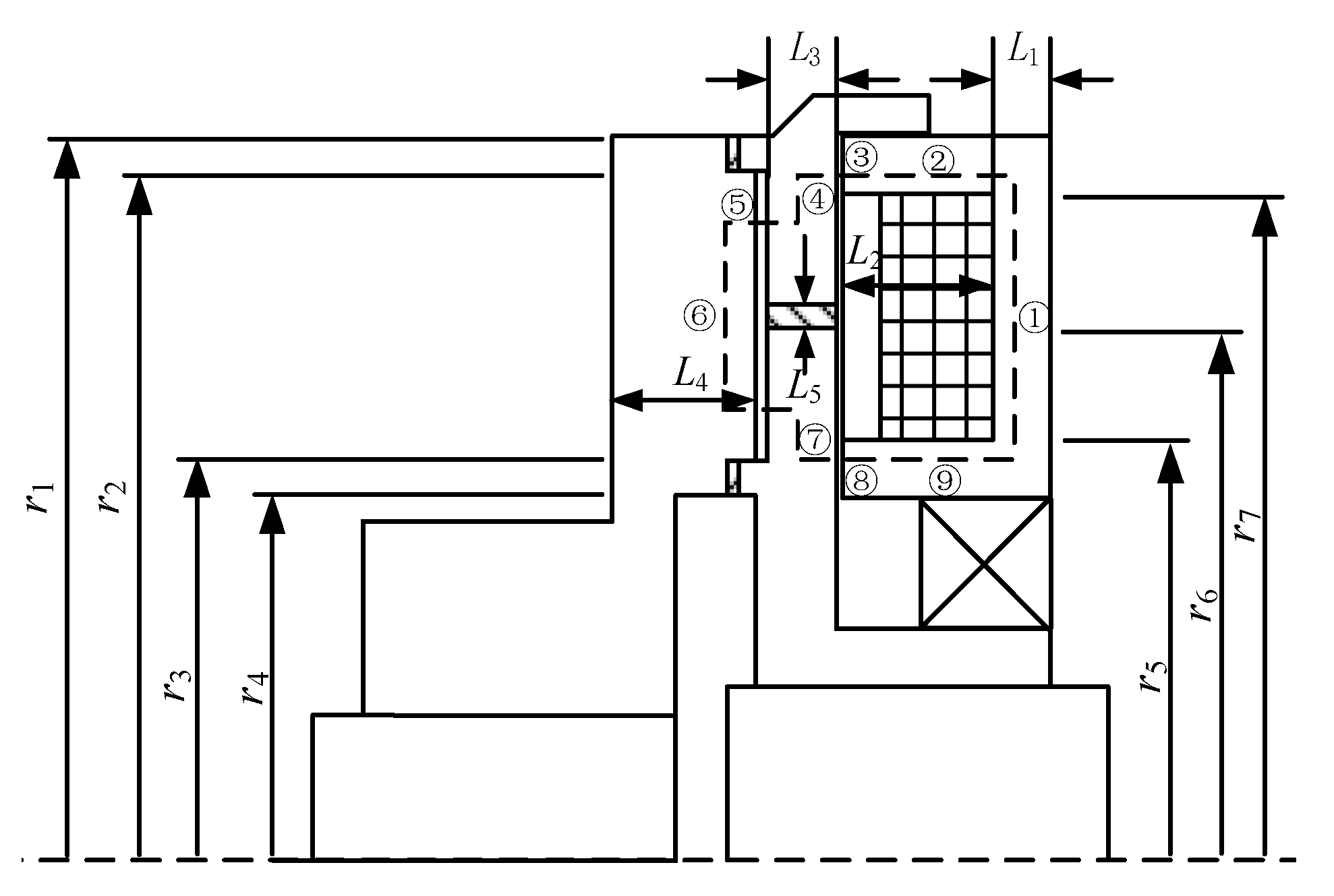
4.2. Simplified Model of the Magnetic Circuit
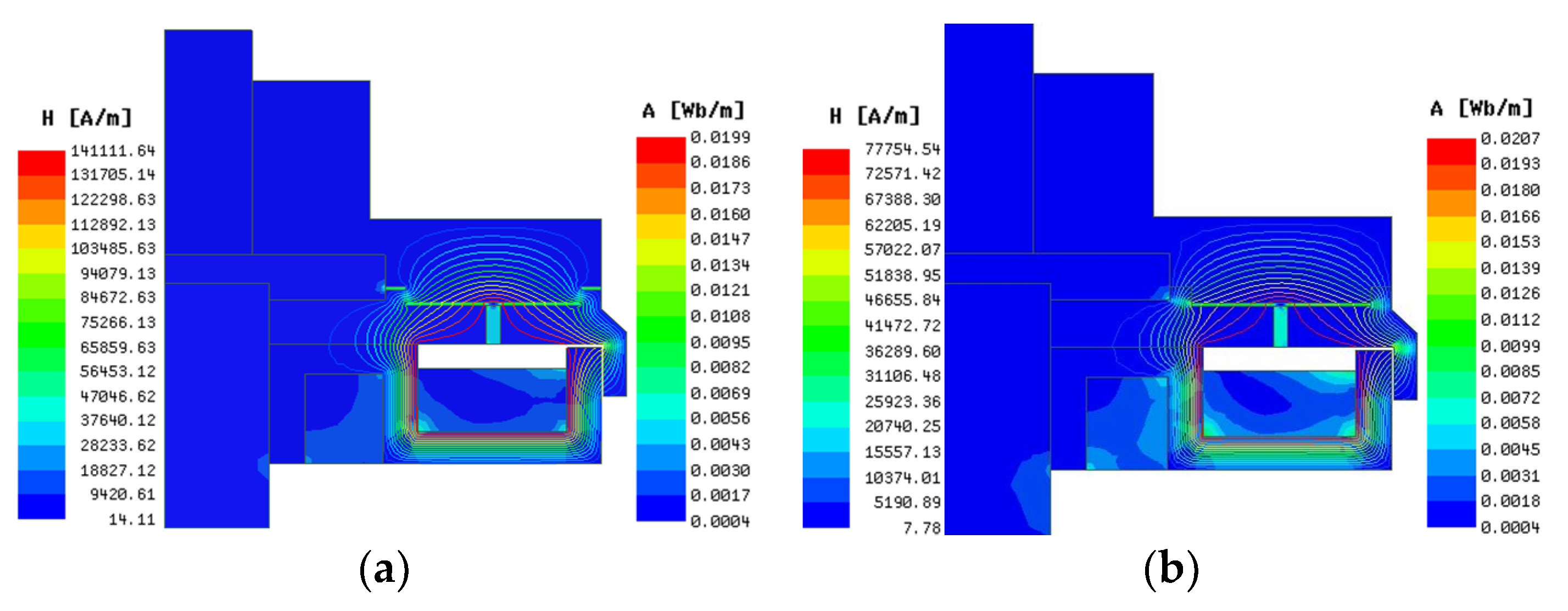
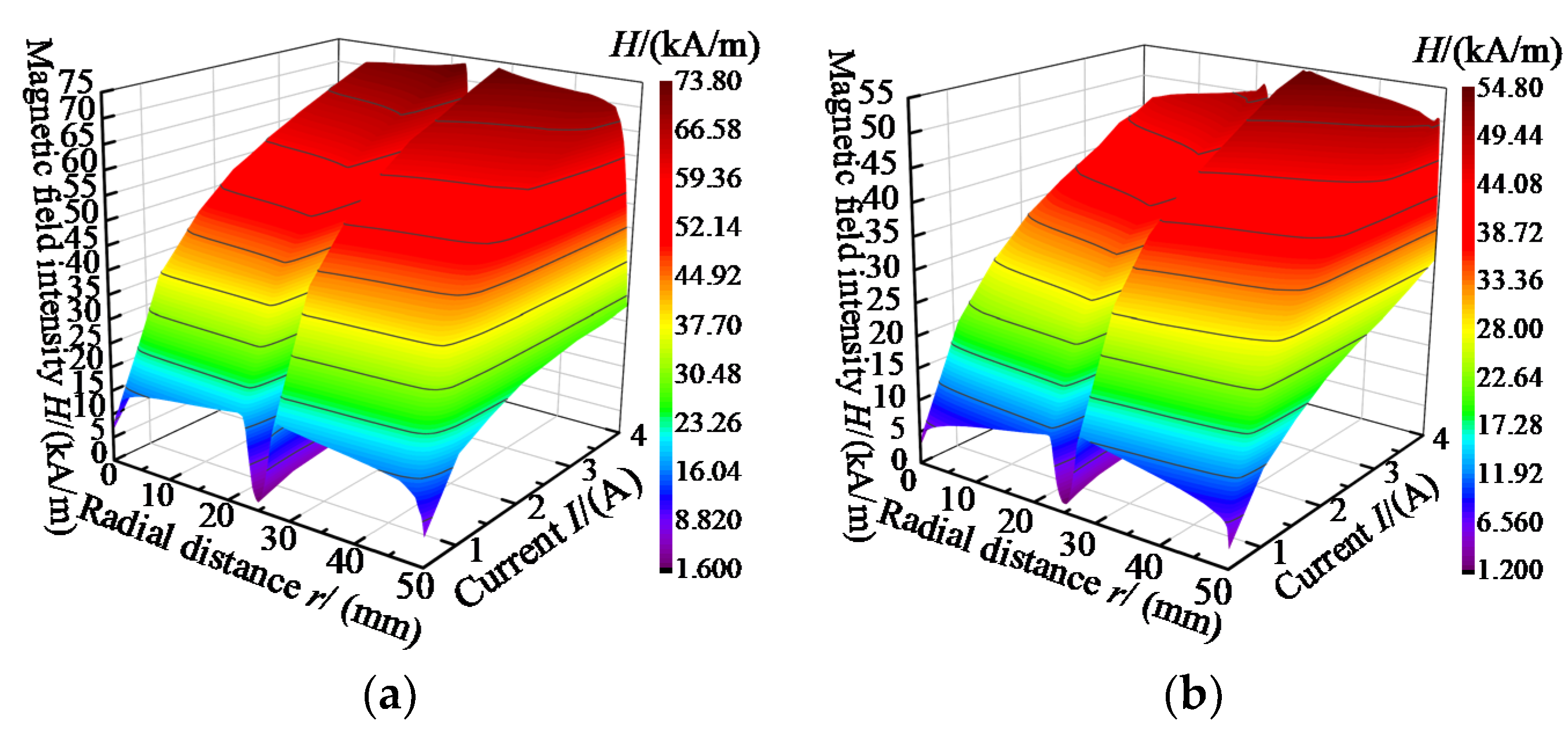
4.3. Analysis of Magnetic Field
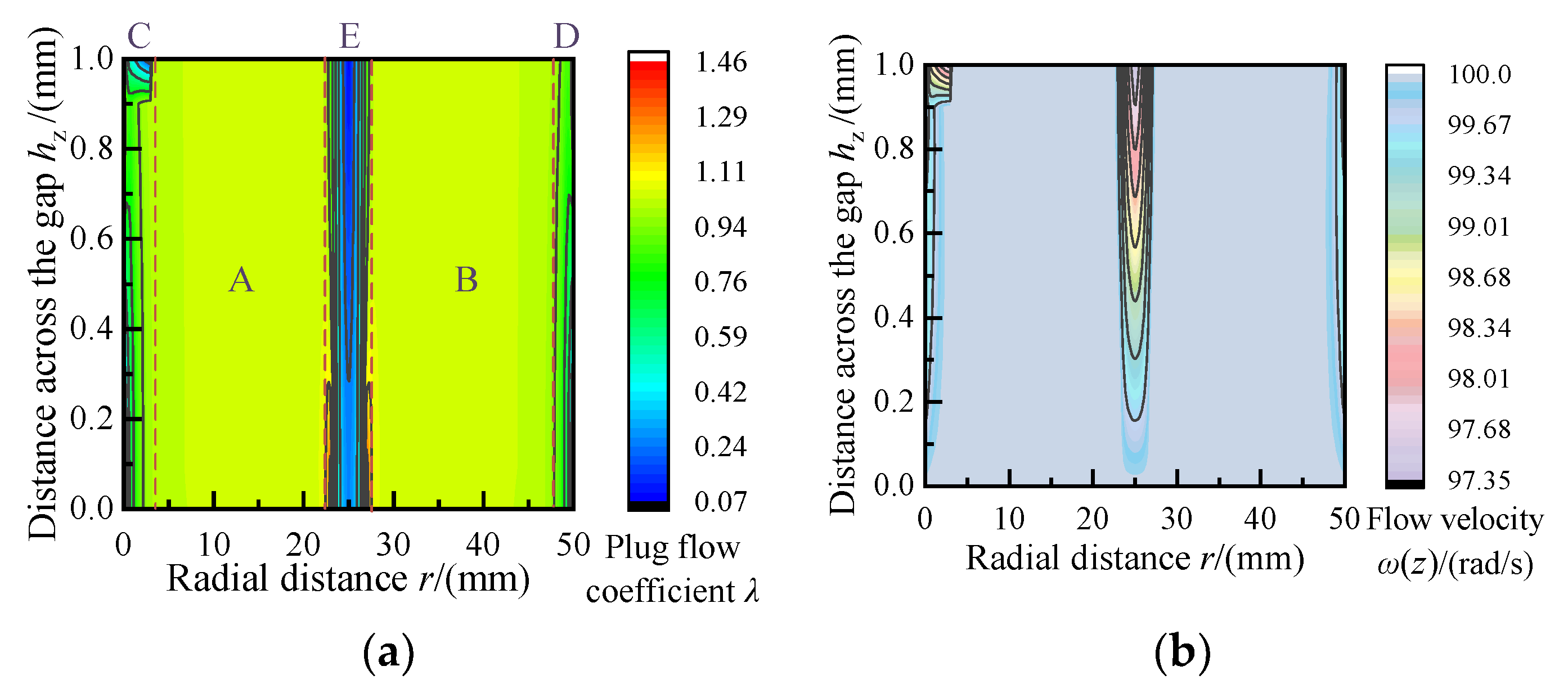
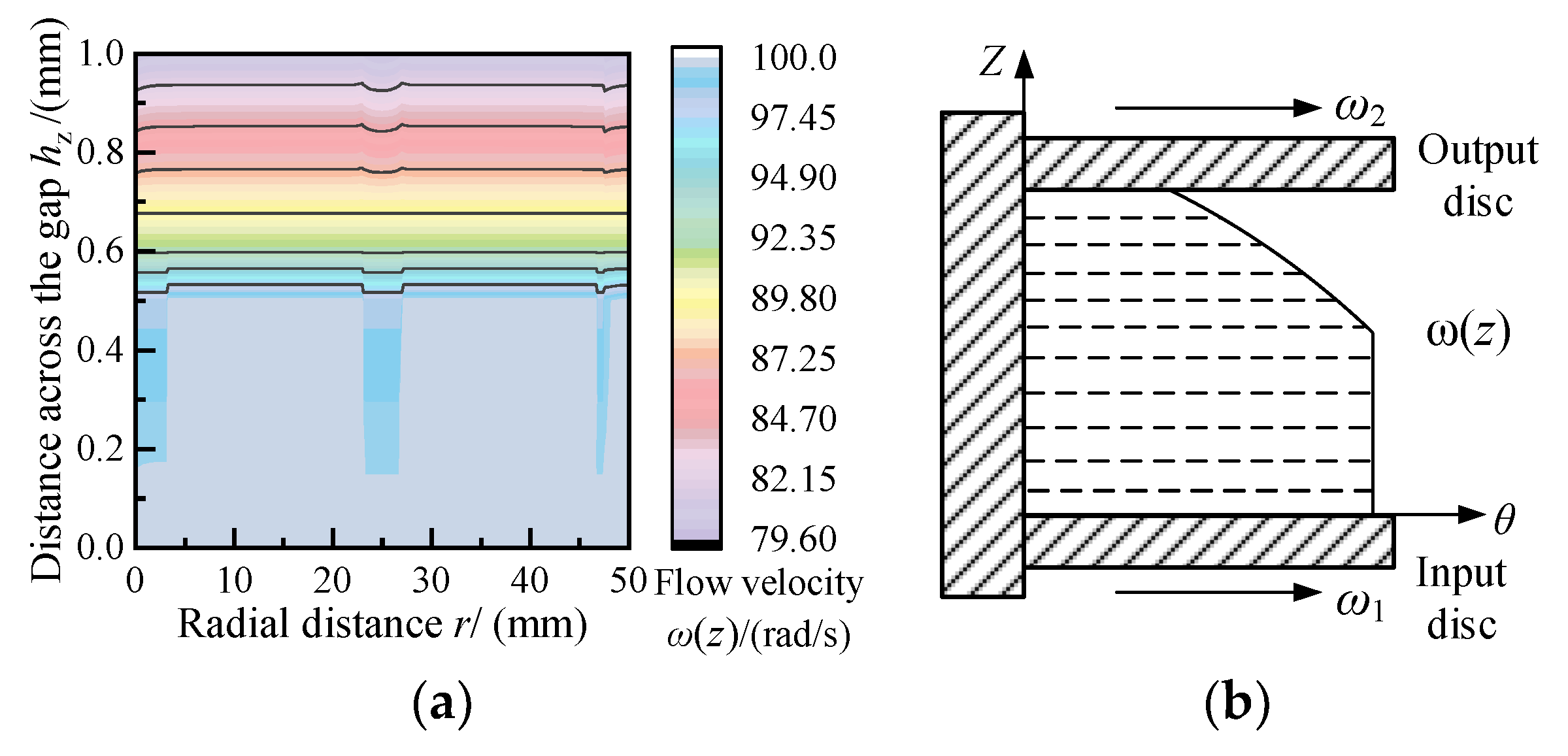
4.4. Flow Analysis of Magnetorheological Fluid
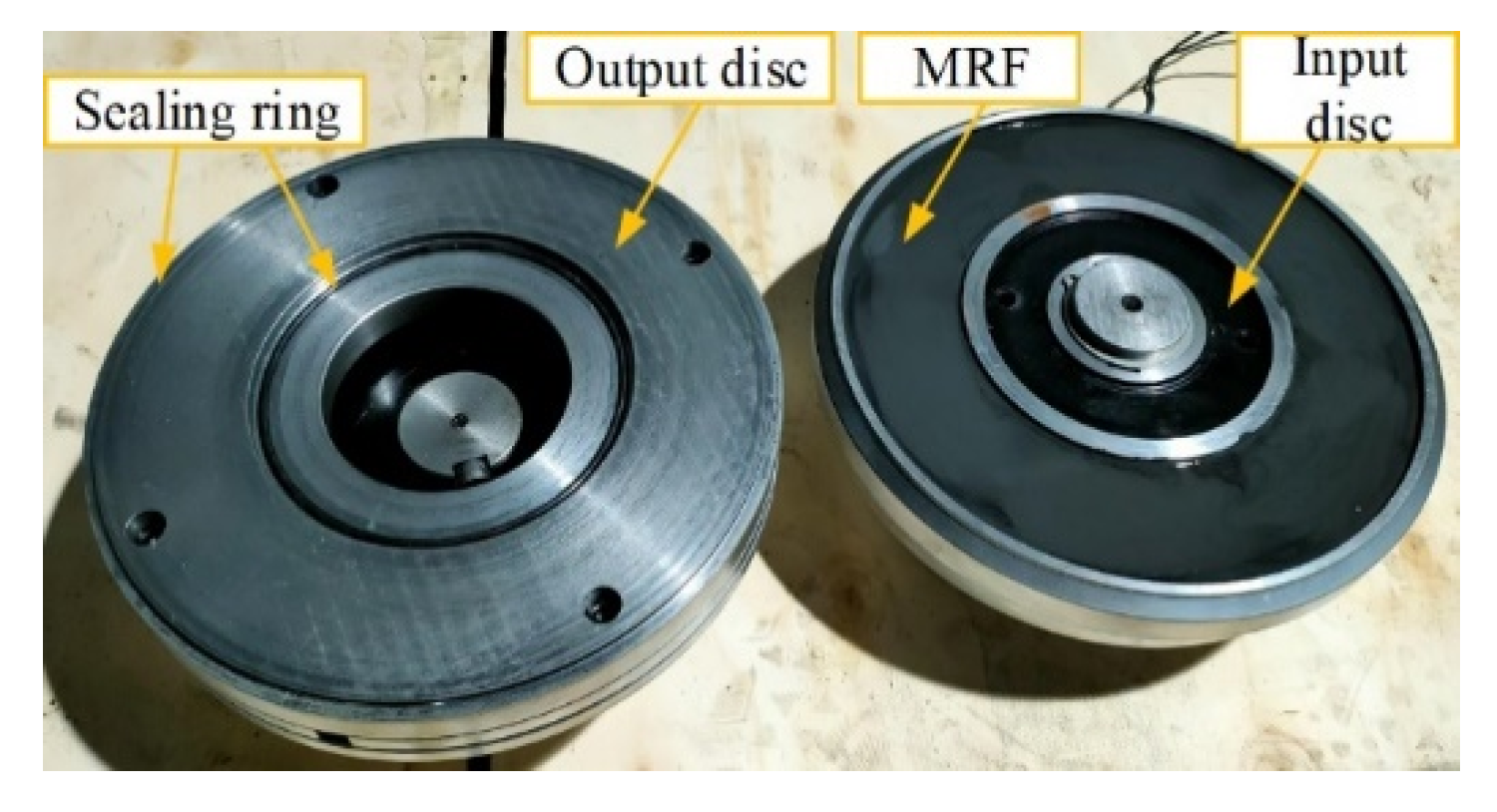
5. Comparative Experimental Study
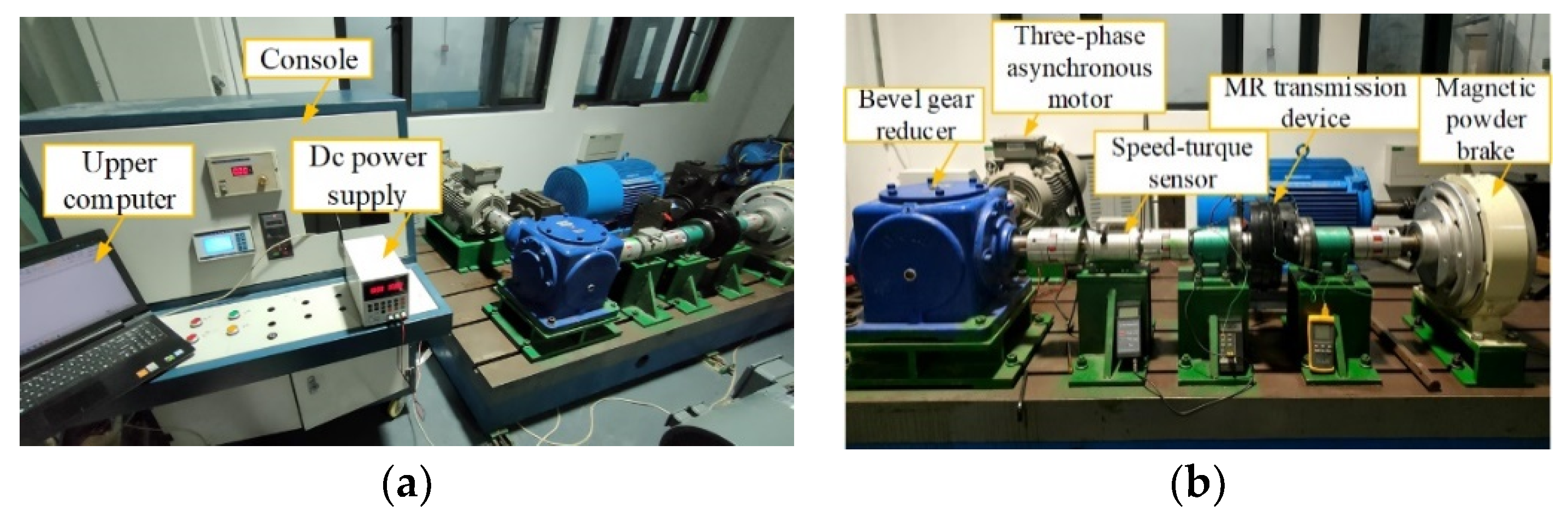
5.1. Magnetorheological Torque Test
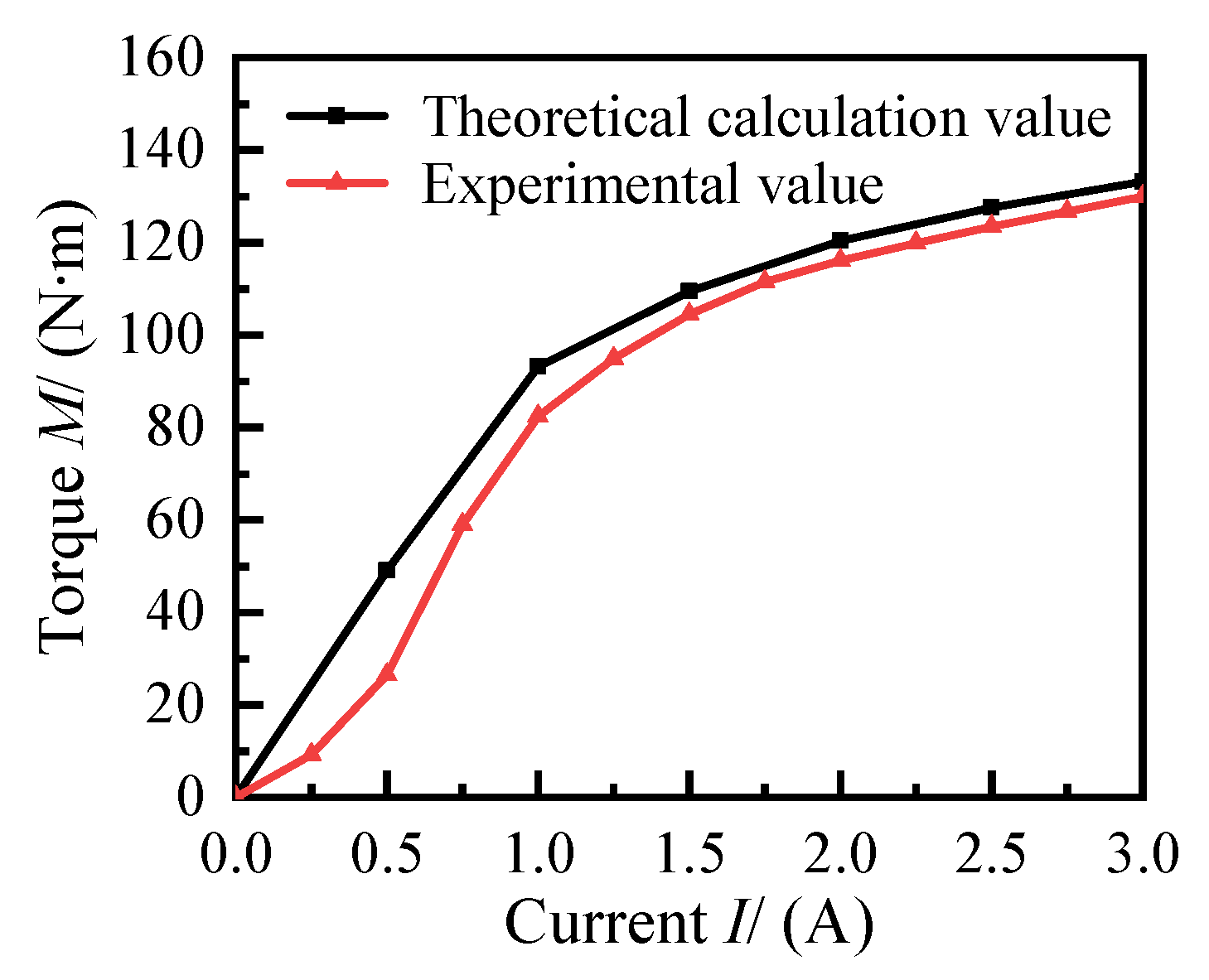
5.2. Analysis of Experimental Results
6. Conclusions
- (1)
- When the coil is energized with DC current, the magnetic field strength under the steady-state magnetic field changes with the variations of the current, working gap size, and material magnetization, satisfying a cubic polynomial relationship with the shear yield stress of the MRF.
- (2)
- Magnetic field optimization through the reasonable use of magnetoresistive elements can effectively increase the torque performance of the MR drive and reduce the influence of the working gap thickness on the magnetic field. Under the same current, the magnetic field strength in the gap of the MRF can be enhanced by up to 45.71% through magnetic field optimization.
- (3)
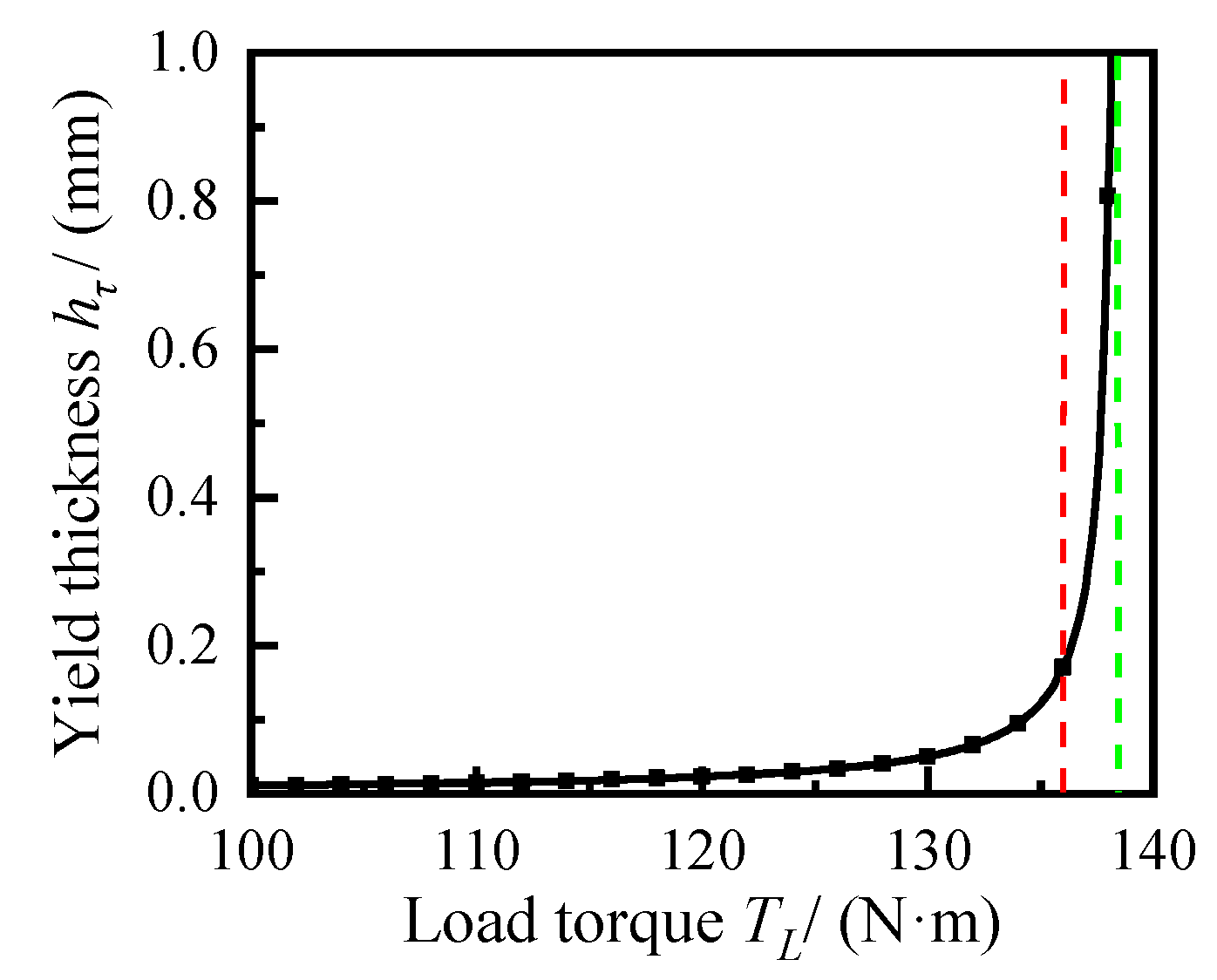
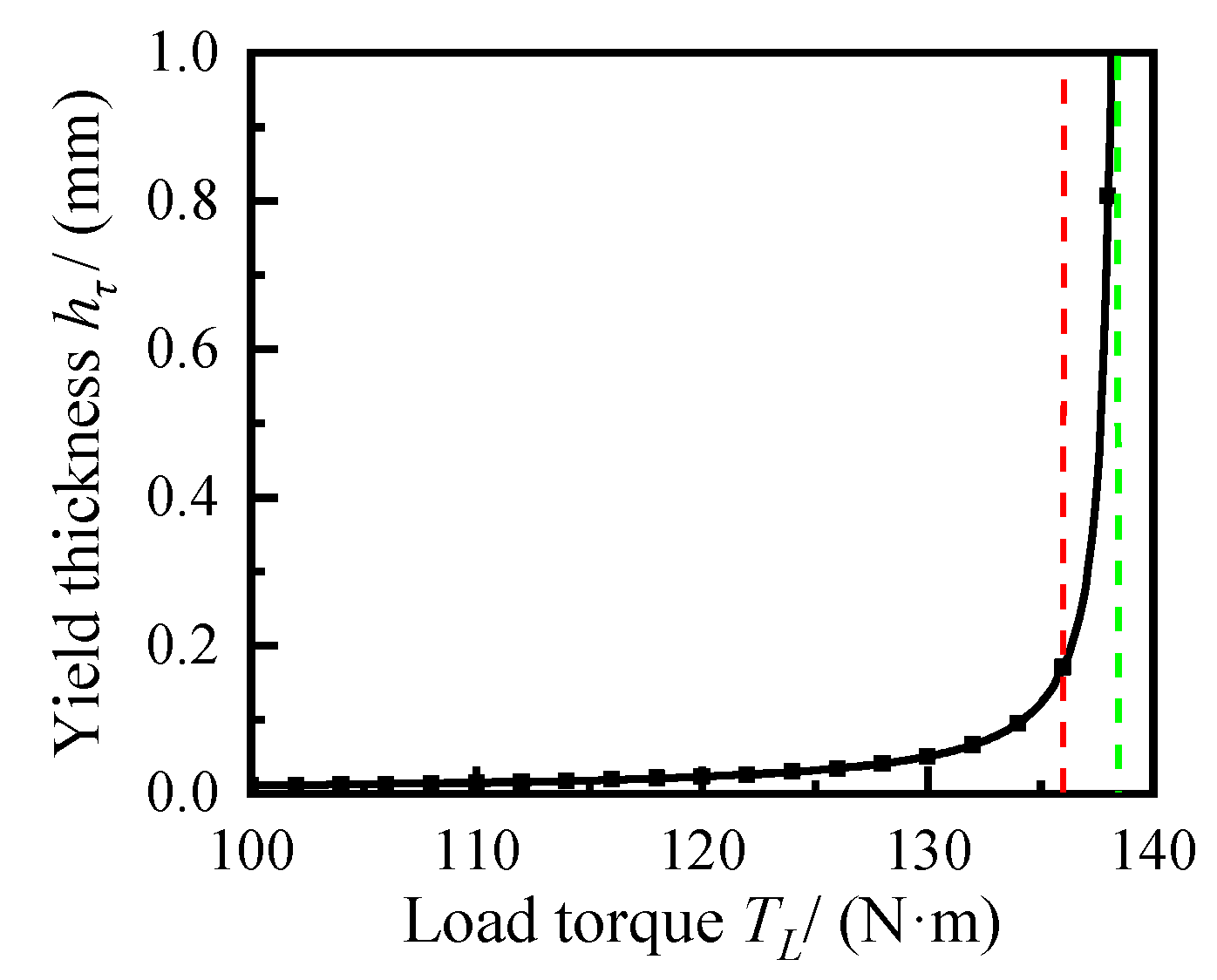
- When the MRF has a continuous circumferential flow between two slit plates, the output angular velocity of the disc-type MR drive is positively correlated with the change in current, and the yield region of the MRF expands with the increase of the load torque, but does not satisfy the linear relationship.
- (4)
- When the torque of the drive is greater than the rated design value, the MRF rapidly changes from rigid flow to full-yield flow, and the partial yield flow state of the MRF exists only in a narrow torque zone. The flow mode of MRF in the yield flow region is laminar flow, and the flow velocity varies greatly with the thickness direction.
- (5)
- The trend of the experimentally tested curve was generally consistent with that of the theoretically calculated curve. The experimental comparison shows that the degree of error of the torque equation used in this paper decreases gradually with the increase of current.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Spaggiari, A.; Castagnetti, D.; Golinelli, N.; Dragoni, E.; Scirè Mammano, G. Smart materials: Properties, design and mechatronic applications. J. Mater. Des. Appl. 2016, 233, 734–762. [Google Scholar] [CrossRef]
- Ashour, O.; Rogers, C.A.; Kordonsky, W. Magnetorheological Fluids Materials, Characterization, and Devices. J. Intel. Mat. Syst. Struct. 1996, 7, 123–130. [Google Scholar] [CrossRef]
- Kavlicoglu, B.; Gordaninejad, F.; Evrensel, C.; Fuchs, A. A semi-active, high-torque, magnetorheological fluid limited slip differential clutch. J. Vib. Acoust. 2006, 128, 604–610. [Google Scholar] [CrossRef]
- Phu, D.X.; Choi, S.-B. Magnetorheological Fluid Based Devices Reported in 2013–2018: Mini-Review and Comment on Structural Configurations. Front. Mater. 2019, 6, 19. [Google Scholar] [CrossRef]
- Sarkar, C.; Hirani, H. Theoretical and experimental studies on a magnetorheological brake operating under compression plus shear mode. Smart Mater. Struct. 2013, 22, 115032. [Google Scholar] [CrossRef]
- Choi, S.; Hong, S.; Cheong, C.; Park, Y. Comparison of Field-Controlled Characteristics Between ER and MR Clutches. J. Intel. Mat. Syst. Struct. 1999, 10, 615–619. [Google Scholar] [CrossRef]
- Huang, J.; Zhang, J.Q.; Yang, Y.; Wei, Y.Q. Analysis and design of a cylindrical magneto-rheological fluid brake. J. Mater. Process. Tech. 2002, 129, 559–562. [Google Scholar] [CrossRef]
- Farjoud, A.; Vahdati, N.; Yap Fook, F. Mathematical Model of Drum-type MR Brakes using Herschel-Bulkley Shear Model. J. Intel. Mater. Syst. Struct. 2007, 19, 565–572. [Google Scholar] [CrossRef]
- Farjoud, A.; Vahdati, N.; Fah, Y.F. MR-fluid yield surface determination in disc-type MR rotary brakes. Smart Mater. Struct. 2008, 17, 035021. [Google Scholar] [CrossRef]
- Fernandez, M.A.; Chang, J.-Y.; Huang, C.-Y. Development of a Passive Magnetorheological Fluid Clutch with Field-Blocking Mechanism. IEEE Trans. Magn. 2018, 54, 4601105. [Google Scholar] [CrossRef]
- Rizzo, R.; Musolino, A.; Bucchi, F.; Forte, P.; Frendo, F. Magnetic FEM Design and Experimental Validation of an Innovative Fail-Safe Magnetorheological Clutch Excited by Permanent Magnets. IEEE Trans. Energy Conver. 2014, 29, 628–640. [Google Scholar] [CrossRef] [Green Version]
- Thakur, M.K.; Sarkar, C. Investigation of Different Groove Profile Effects on Torque Transmission in Shear Mode Magnetorheological Clutch: Numerical Simulation and Experimental Study. J. Tribol. ASME 2021, 143, 091801. [Google Scholar] [CrossRef]
- Zhang, J.; Lu, S. Consideration of centrifugal effect in torque estimation for disc-type MR devices. Smart Mater. Struct 2018, 27, 105022. [Google Scholar] [CrossRef]
- Wang, P.; Katopodes, N.; Fujii, Y. Two-Phase MRF Model for Wet Clutch Drag Simulation. SAE Int. J. Engines 2017, 10, 1327–1337. [Google Scholar] [CrossRef]
- Mohammad, M.Z.; Mohammad, H.K.; Mahmood, N.; Amir, J. Parametric investigation of twin tube magnetorheological dampers using a new unsteady theoretical analysis. J. Intel. Mat. Syst. Struct. 2019, 30, 878–895. [Google Scholar] [CrossRef]
- Blanchard, D.; Ligrani, P.; Gale, B. Miniature Single-Disk Viscous Pump (Single-DVP), Performance Characterization. J. Fluids Eng. 2006, 128, 602–619. [Google Scholar] [CrossRef]
- Oertel, H. Prandtl-Essentials of Fluid Mechanics, 3rd ed.; Springer: New York, NY, USA, 2010; pp. 115–118. [Google Scholar]
- Sun, T.; Peng, X.; Li, J.; Feng, C. Testing device and experimental investigation to influencing factors of Magnetorheological fluid. Int. J. Appl. Electrom. 2013, 43, 283–292. [Google Scholar] [CrossRef]
- Song, W.-L.; Li, D.-H.; Tao, Y.; Wang, N.; Xiu, S.-C. Simulation and experimentation of a magnetorheological brake with adjustable gap. J. Intel. Mat. Syst. Struct. 2016, 28, 1614–1626. [Google Scholar] [CrossRef]
- William, H.; Hayt, J.; Buck, J.A. Engineering Electromagnetics, 8th ed.; McGraw-Hill Science: New York, NY, USA, 2011; pp. 248–251. [Google Scholar]
- Huang, J.P. New mechanism for harmonic generation in magnetorheological fluids. J. Phys.—Condens. Mat. 2004, 16, 7889–7894. [Google Scholar] [CrossRef] [Green Version]
- Bombard, A.J.F.; Joekes, I.; Alcântara, M.R.; Knobel, M. Magnetic Susceptibility and Saturation Magnetization of some Carbonyl Iron Powders used in Magnetorheological Fluids. Mater. Sci. Forum 2003, 416–418, 753–760. [Google Scholar] [CrossRef]
- Laherisheth, Z.; Upadhyay, R.V. Influence of particle shape on the magnetic and steady shear magnetorheological properties of nanoparticle based MR fluids. Smart Mater. Struct. 2017, 26, 054008. [Google Scholar] [CrossRef]
- Wen, M.; Chambers, J.; Sherman, S.G.; Wereley, N.M. Monitoring sedimentation of magnetorheological fluids using a vertical axis monitoring system with a low aspect ratio sensor coil. Smart Mater. Struct. 2019, 28, 025039. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Volume Fraction/% | Additives Ratio/% | Base Fluid | Zero Field Viscosity/Pa·s |
|---|---|---|---|
| 5 | 1.4 | silicone oil | 0.12 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| r1 | 135 | r7 | 125 |
| r2 | 129 | L1 | 10 |
| r3 | 79 | L2 | 26 |
| r4 | 73 | L3 | 12 |
| r5 | 83 | L4 | 25 |
| r6 | 92 | L5 | 4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, J.; Chen, W.; Shu, R.; Wei, J. Research on the Flow and Transmission Performance of Magnetorheological Fluid between Two Discs. Appl. Sci. 2022, 12, 2252. https://doi.org/10.3390/app12042252
Huang J, Chen W, Shu R, Wei J. Research on the Flow and Transmission Performance of Magnetorheological Fluid between Two Discs. Applied Sciences. 2022; 12(4):2252. https://doi.org/10.3390/app12042252
Chicago/Turabian StyleHuang, Jin, Wenjian Chen, Ruizhi Shu, and Jing Wei. 2022. "Research on the Flow and Transmission Performance of Magnetorheological Fluid between Two Discs" Applied Sciences 12, no. 4: 2252. https://doi.org/10.3390/app12042252
APA StyleHuang, J., Chen, W., Shu, R., & Wei, J. (2022). Research on the Flow and Transmission Performance of Magnetorheological Fluid between Two Discs. Applied Sciences, 12(4), 2252. https://doi.org/10.3390/app12042252