
Arc Modeling and Kurtosis Detection of Fault with Arc in Power Distribution Networks


Abstract
:1. Introduction
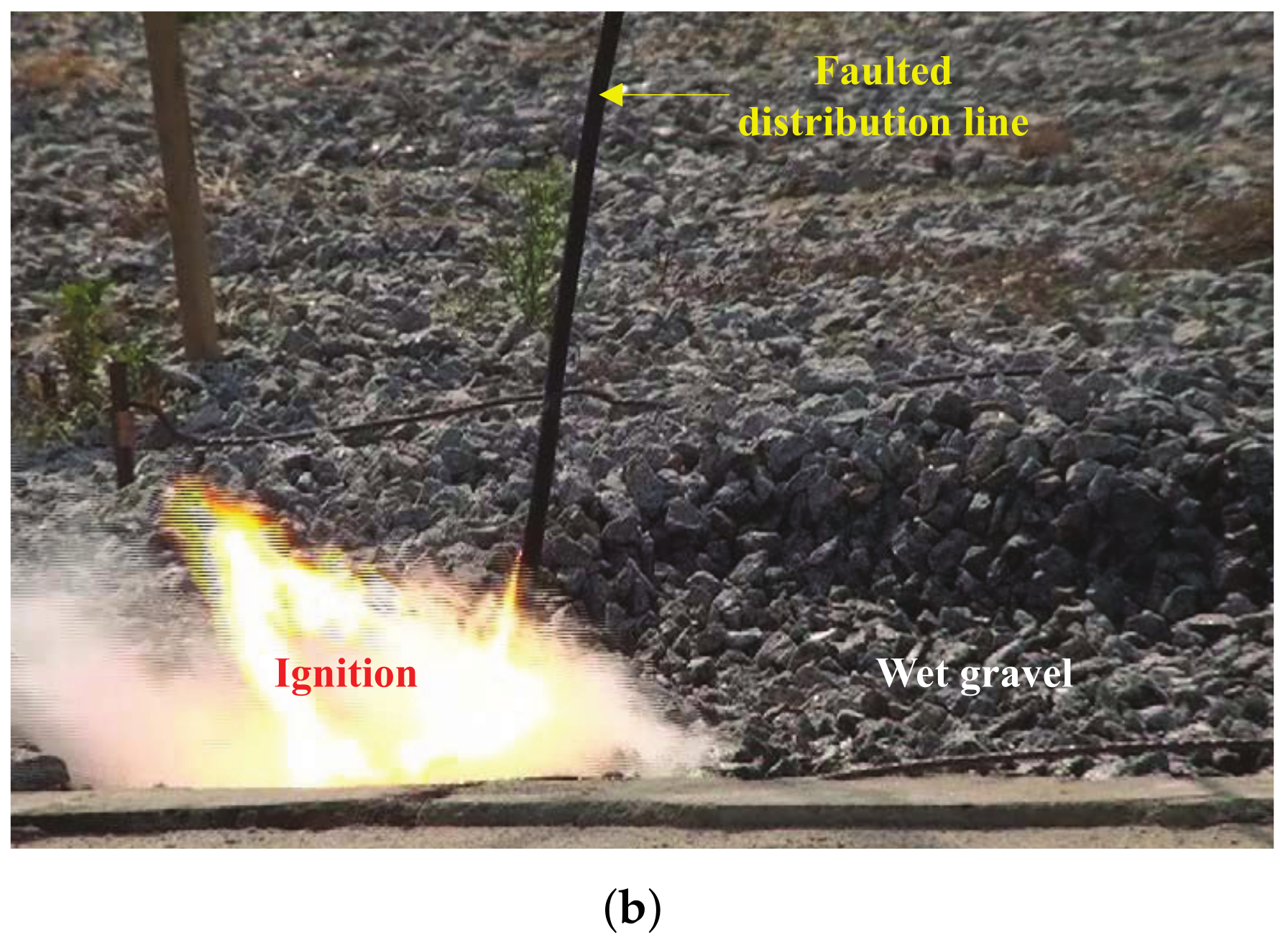
- Fault with arc was experimentally implemented for arc waveform analysis.
- New arc model was mathematically designed by solely using arc voltage.
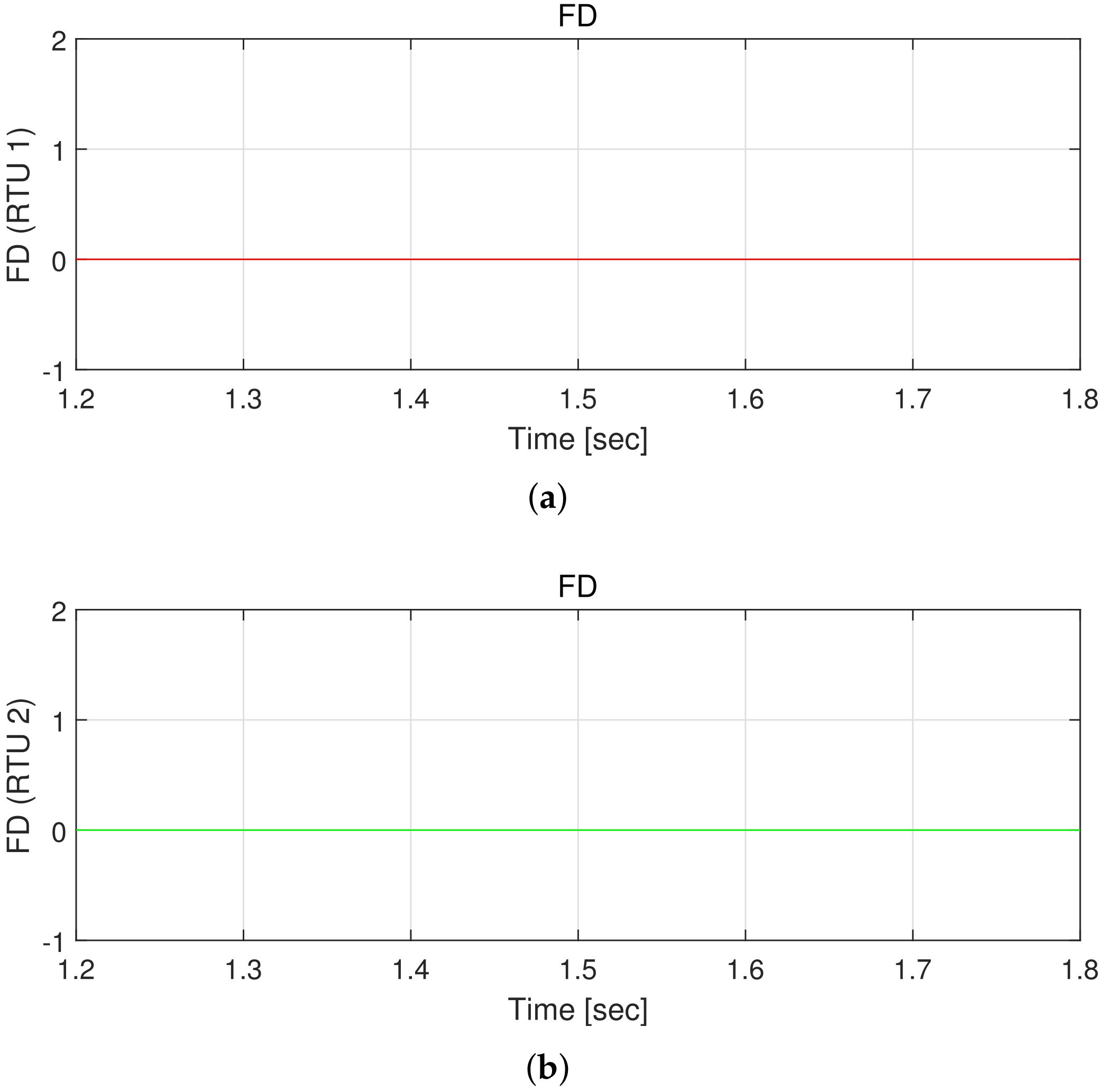
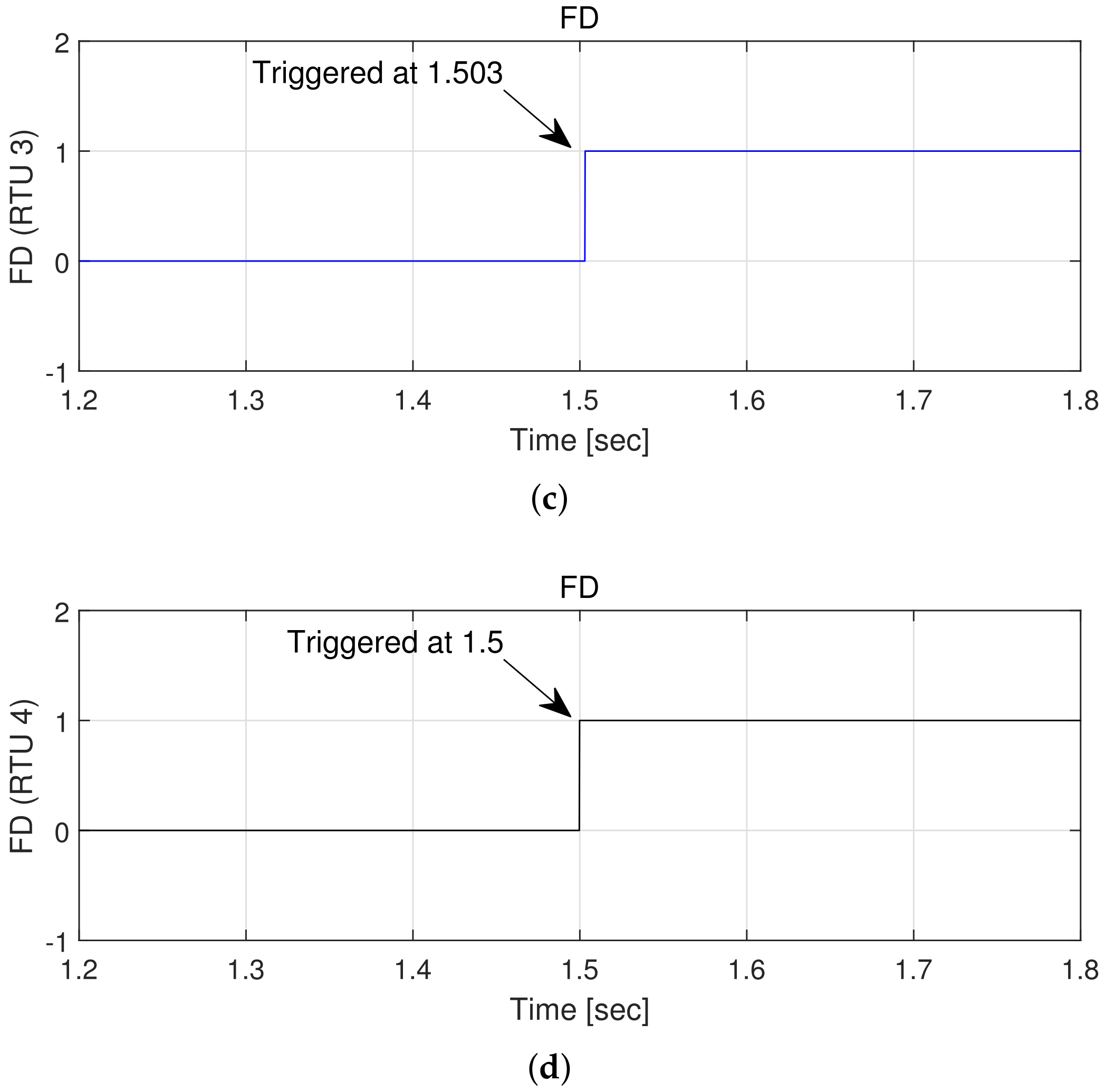
- Fault detector based on kurtosis detection algorithm was developed and detection performance was validated using simulation.
2. Experimental Work and Arc Waveform Analysis
2.1. Problem Statement
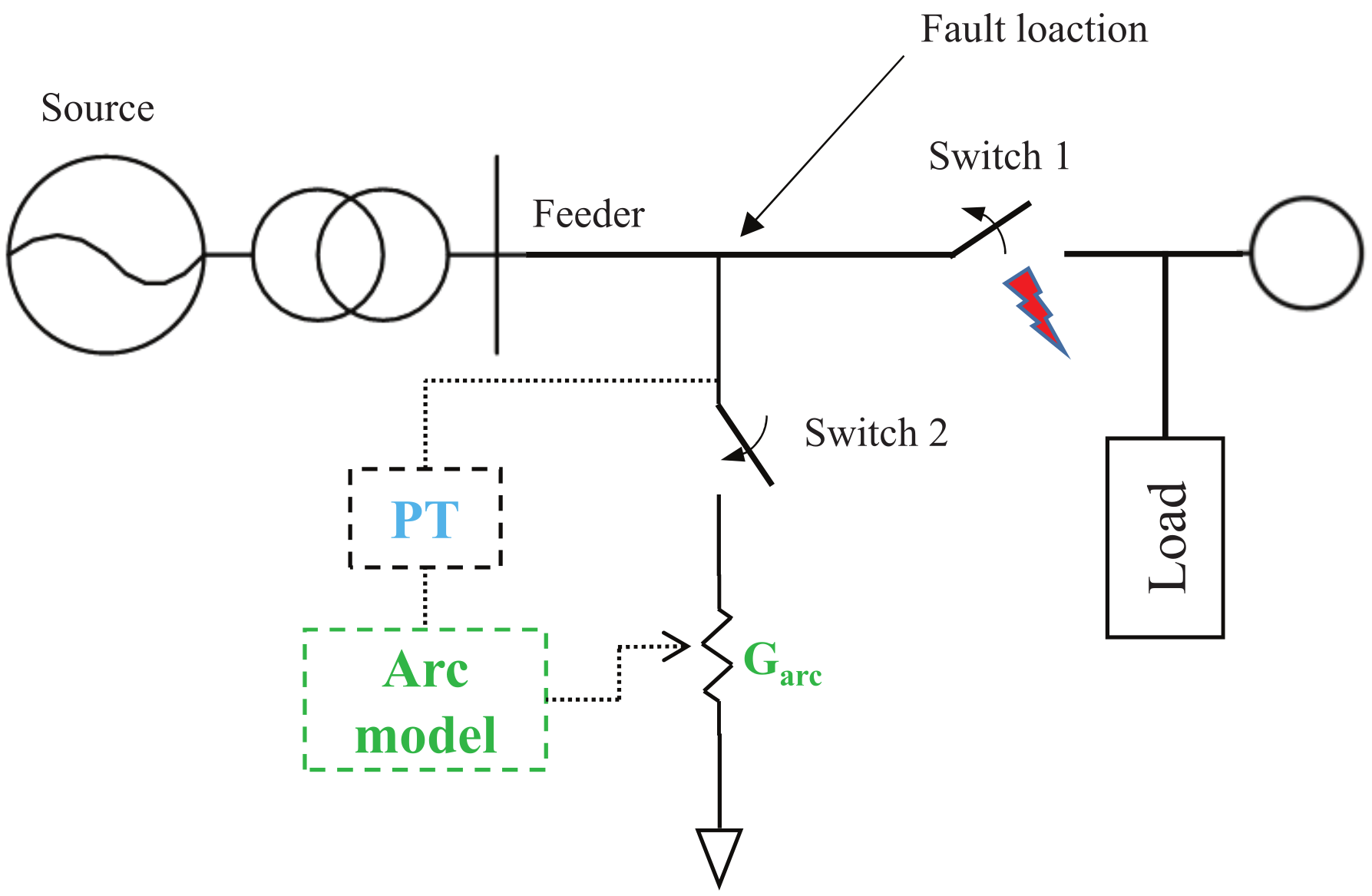
2.2. Experiment Setup
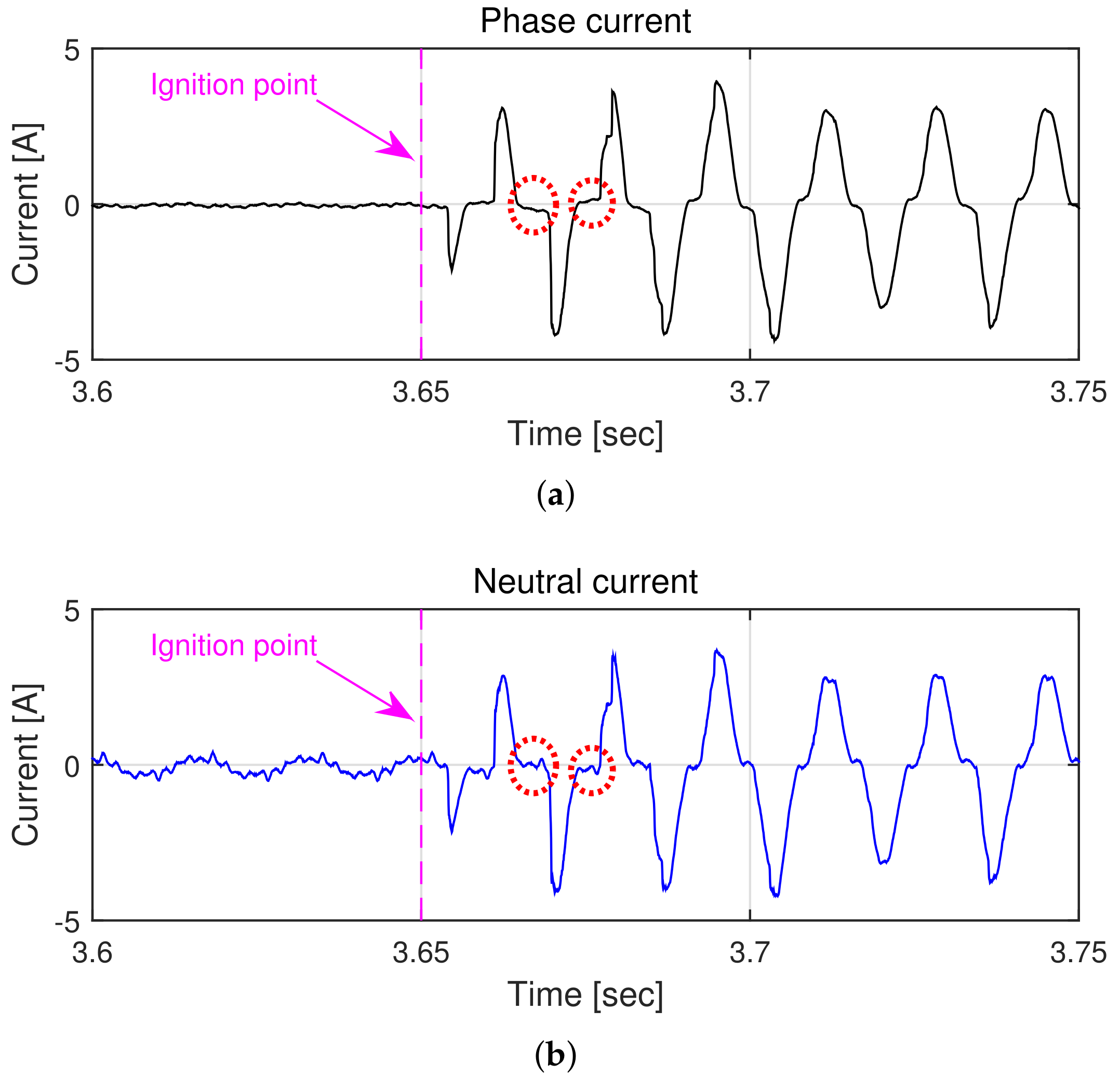
2.3. Arc Experiment
- Step 1: Switch 1 was opened at 0 s;
- Step 2: Switch 2 was closed at 3.65 s;
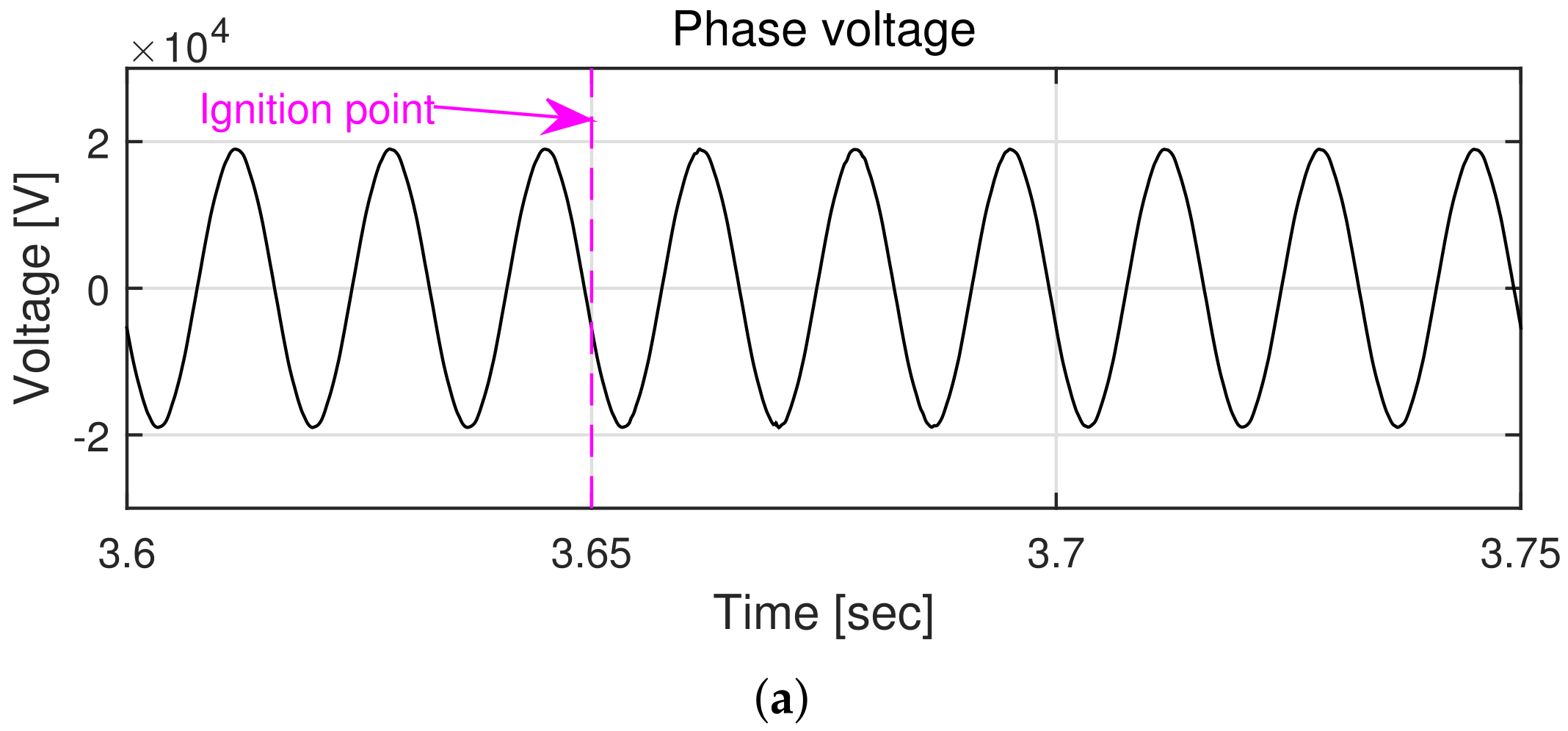
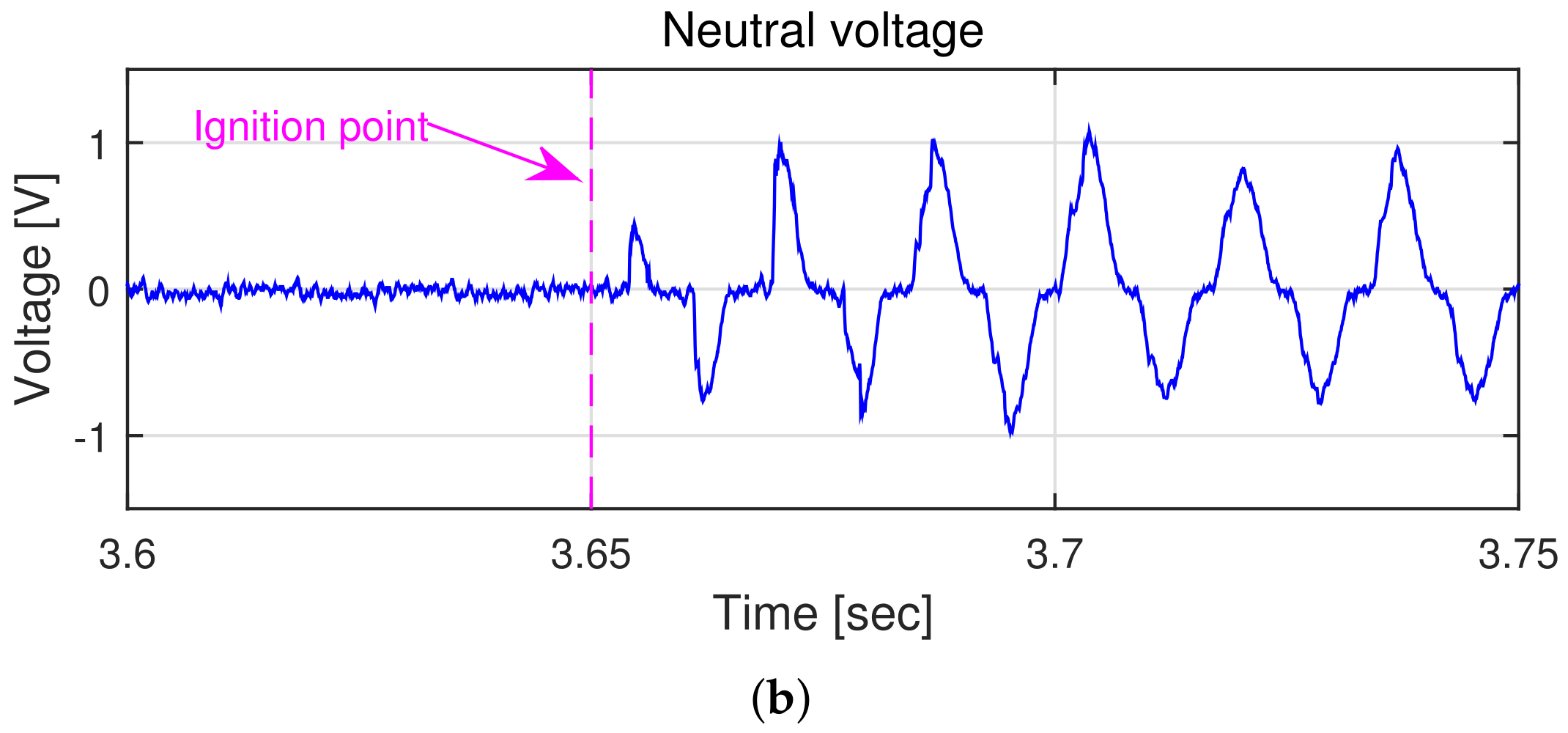
- Step 3: ignition was started after 3.65 s.
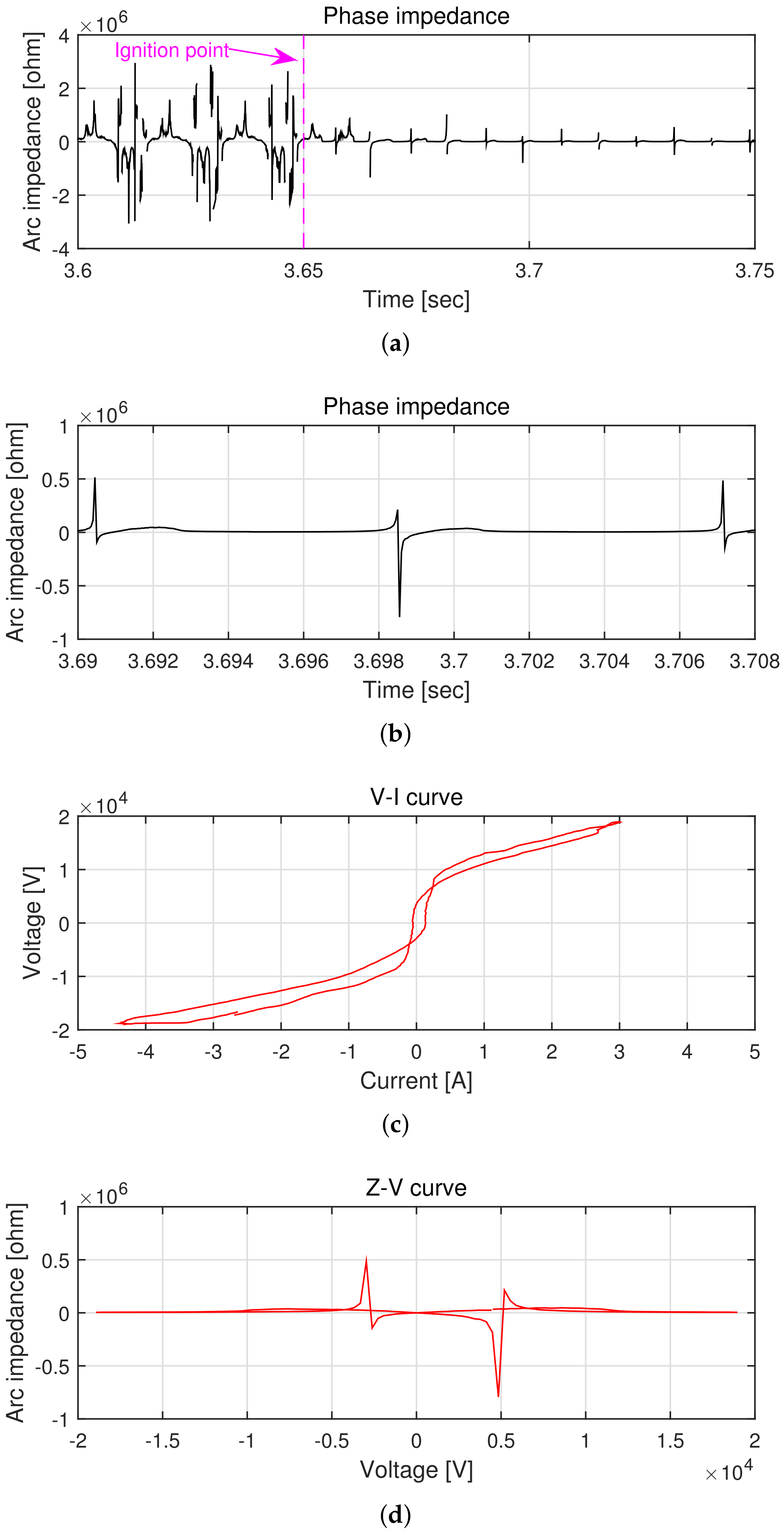
2.4. Arc Waveform Analysis
3. Arc Modeling
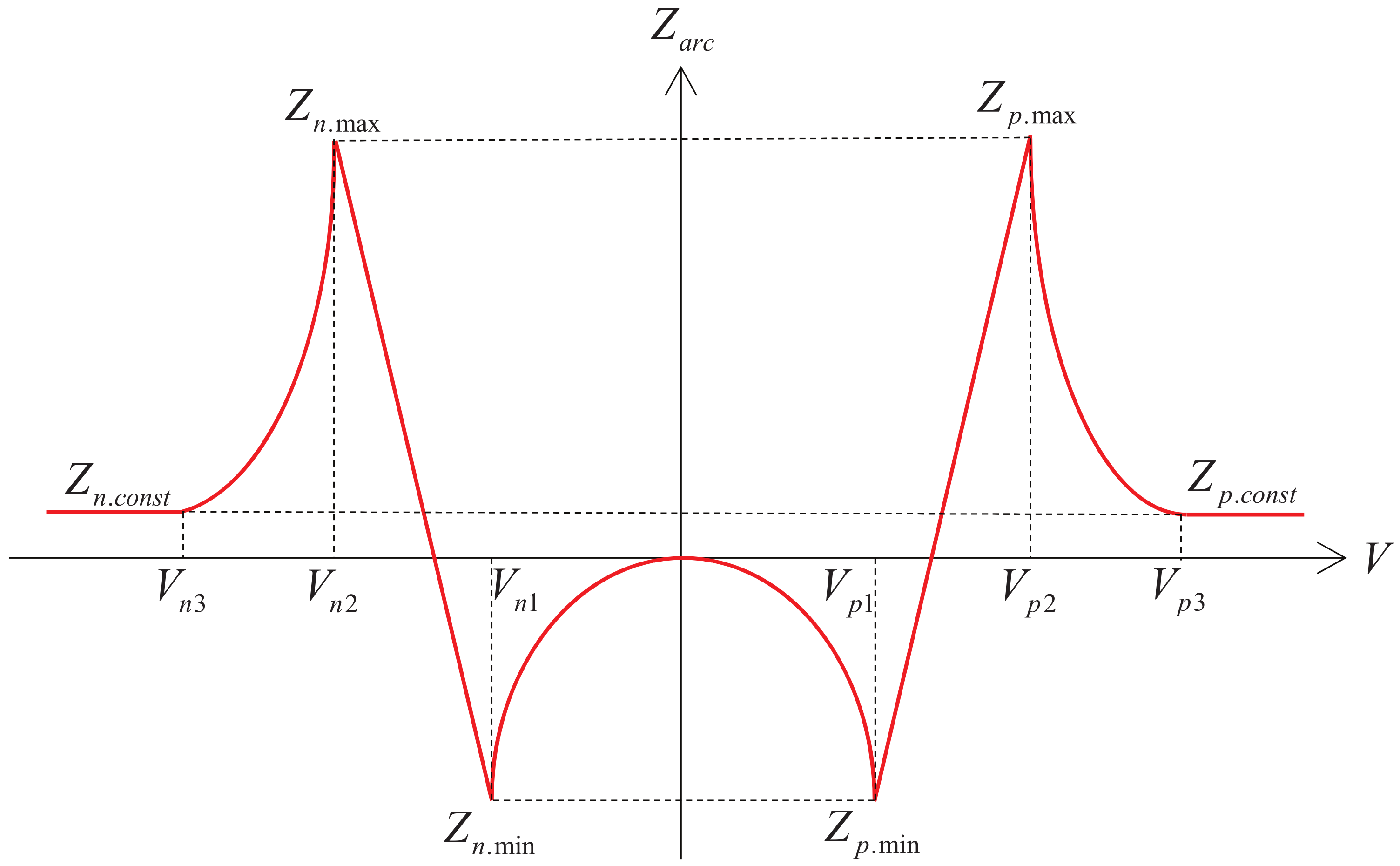
3.1. Mathematical Arc Modeling
- Positive half cycleAfter the ignition time, the arc impedance () can be determined by the following equations for positive phase voltage. The first and third equations are nonlinear functions and the second equation is a linear function. The last equation is defined as a constant value because there is no waveform distortion due to the arc in the region where the phase voltage exceeds .where , , and are positive integers.
- Negative half cycleSimilar to the case of the positive half cycle, the arc impedance can be determined by the following equations for negative phase voltage:where , , and are positive integers.
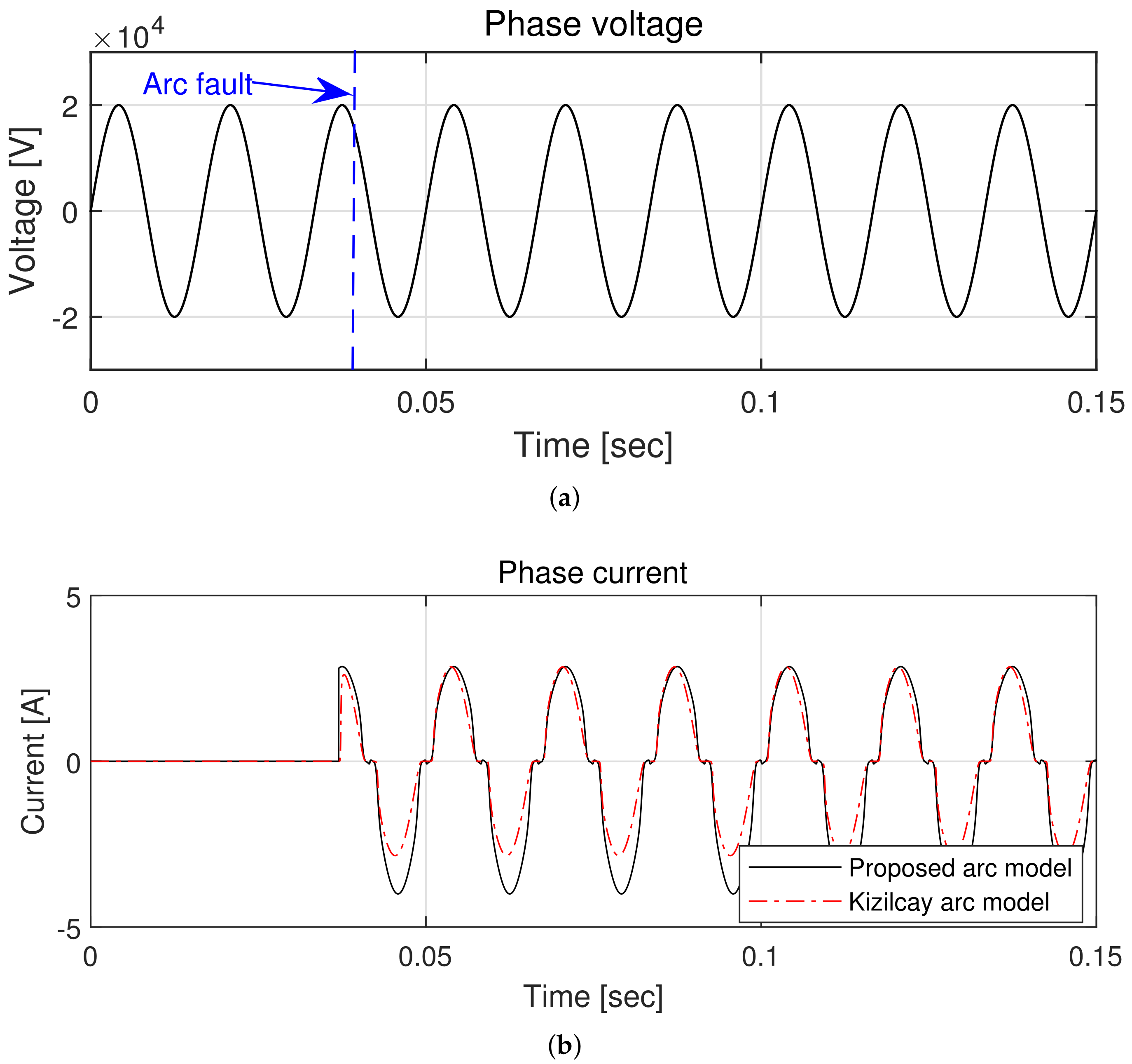
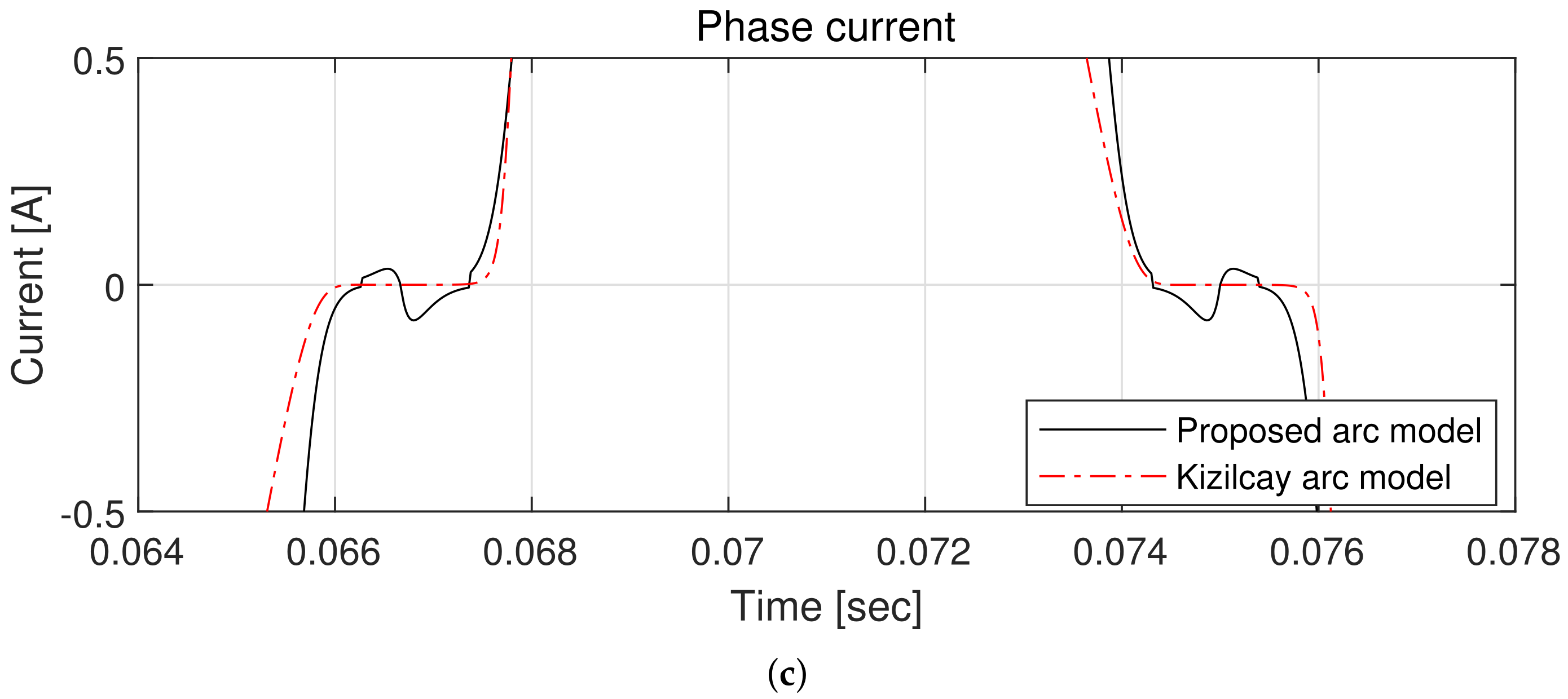
3.2. Model Verification
4. Fault Detection and Power System Simulations
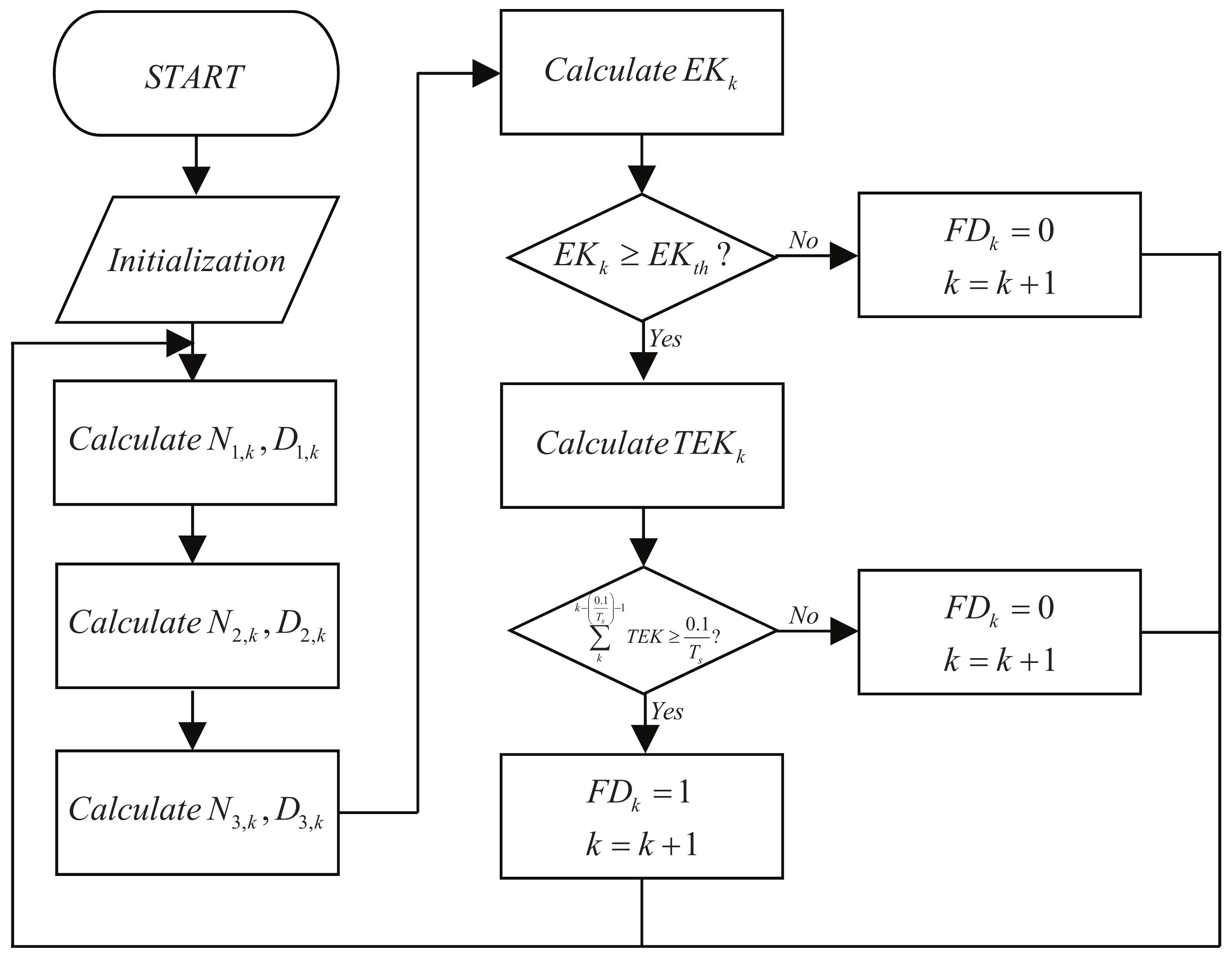
4.1. Fault Detection Logic Using Kurtosis Detection
- k: sampling index of digital processor;
- : numerator coefficient at the k-th sampling index;
- : denominator coefficient at the k-th sampling index;
- : numerator coefficient for the N-th period;
- : denominator coefficient for the N-th period;
- : numerator average coefficient for the N-th period;
- : denominator average coefficient for the N-th period;
- : excess kurtosis value at the k-th sampling index;
- : excess kurtosis threshold value;
- : arbitrary excess kurtosis value at the k-th sampling index;
- : total excess kurtosis value at the k-th sampling index;
- : fault detector value at the k-th sampling index.
| Algorithm 1 The pseudo-code describing the proposed fault detection method is presented |
|
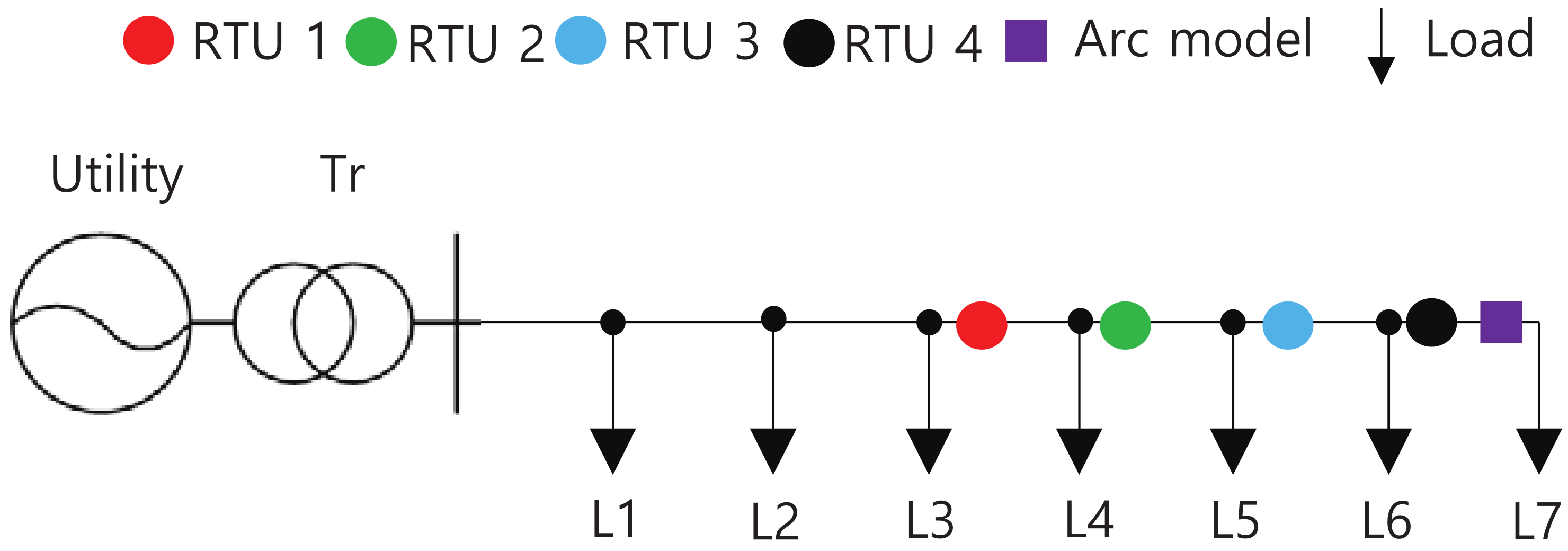
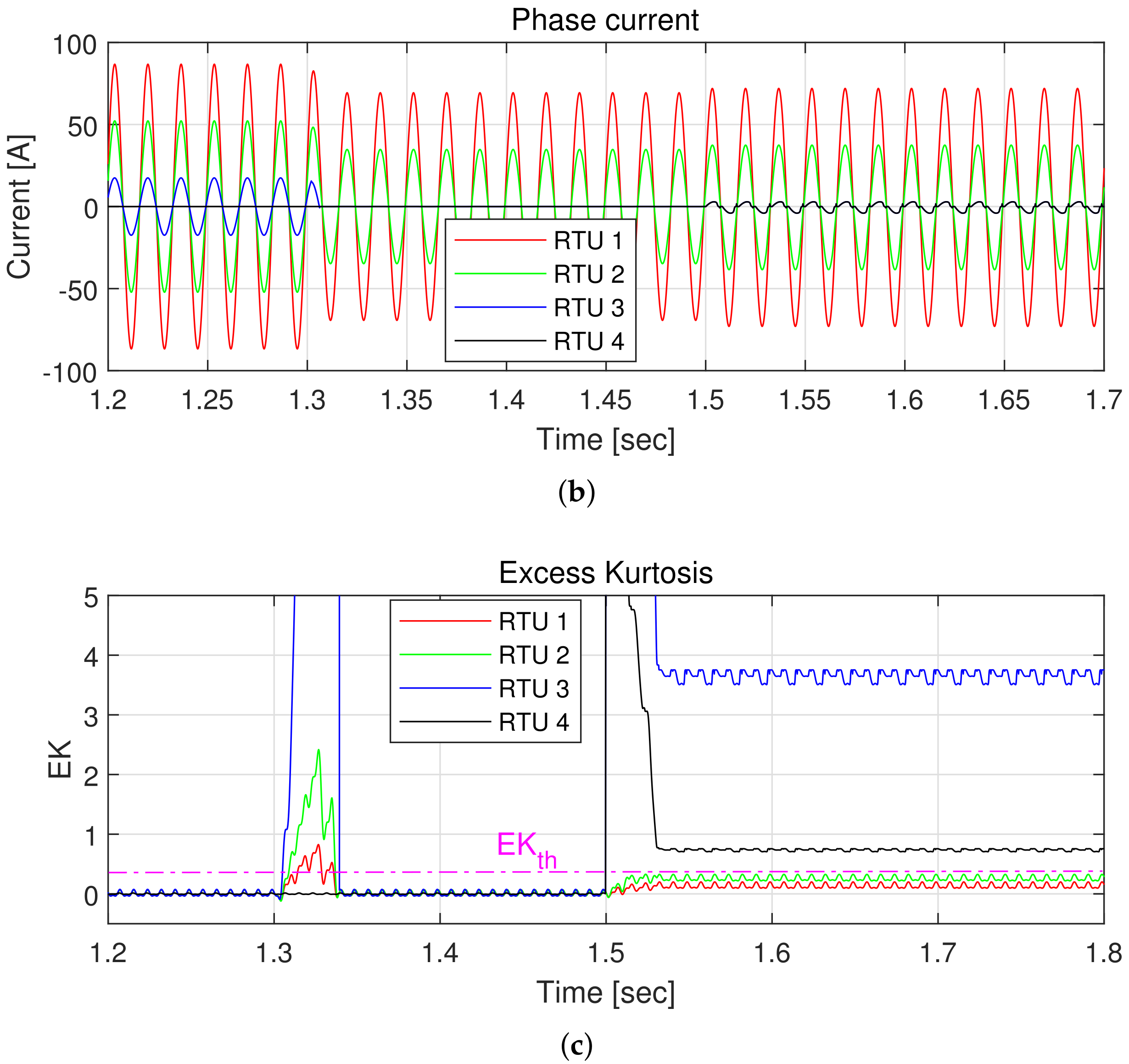
4.2. Power System Simulation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| arc impedance [] | |
| maximum arc impedances in positive half cycle [] | |
| maximum arc impedances in negative half cycle [] | |
| minimum arc impedances in positive half cycle [] | |
| minimum arc impedances in negative half cycle [] | |
| arc impedance of constant arc impedance regions in positive half cycle [] | |
| arc impedance of constant arc impedance regions in negative half cycle [] | |
| attenuation rate of first nonlinear curve in positive half cycle | |
| attenuation rate of second nonlinear curve in positive half cycle | |
| attenuation rate of first nonlinear curve in negative half cycle | |
| attenuation rate of second nonlinear curve in negative half cycle | |
| V | phase voltage [V] |
| maximum voltage of first nonlinear arc impedance region in positive half cycle [V] | |
| maximum voltage of linear arc impedance region in positive half cycle [V] | |
| minimum voltage of constant arc impedance region in positive half cycle [V] | |
| maximum voltage of first nonlinear arc impedance region in negative half cycle [V] | |
| maximum voltage of linear arc impedance region in negative half cycle [V] | |
| minimum voltage of constant arc impedance region in negative half cycle [V] | |
| slope of linear arc impedance region in positive half cycle | |
| slope of linear arc impedance region in negative half cycle | |
| y-intercept of linear arc impedance region in positive half cycle | |
| y-intercept of linear arc impedance region in negative half cycle |
References
- Elkalashy, N.I.; Lehtonen, M.; Darwish, H.A.; Izzularab, M.A.; Taalab, A.I. Modeling and experimental verification of high impedance arcing fault in medium voltage networks. IEEE Trans. Dielectr. Electr. Insul. 2007, 14, 375–383. [Google Scholar] [CrossRef]
- Iurinic, L.U.; Herrera-Orozco, A.R.; Ferraz, R.G.; Bretas, A.S. Distribution systems high-impedance fault location: A parameter estimation approach. IEEE Trans. Power Deliv. 2016, 31, 1806–1814. [Google Scholar] [CrossRef]
- Cui, Q.; Weng, Y. Enhance high impedance fault detection and location accuracy via μ-PMUs. IEEE Trans. Smart Grid 2020, 11, 797–809. [Google Scholar] [CrossRef]
- Friedemann, D.F.; Motter, D.; Oliveira, R.A. Stator-ground fault location method based on third-harmonic measures in high-impedance grounded generators. IEEE Trans. Power Electron. 2021, 36, 794–802. [Google Scholar] [CrossRef]
- Chakraborty, S.; Das, S. Application of smart meters in high impedance fault detection on distribution Systems. IEEE Trans. Smart Grid 2019, 10, 3465–3473. [Google Scholar] [CrossRef]
- Torres, V.; Guardado, J.L.; Ruiz, H.F.; Maximov, S. Modelling and detection of high impedance faults. Int J Electr. Power Energy Syst. 2014, 61, 163–172. [Google Scholar] [CrossRef]
- Lopes, G.N.; Menezes, T.S.; Santos, G.G.; Trondoli, L.H.P.C.; Vieira, J.C.M. High impedance fault detection based on harmonic energy variation via S-transform. Int. J. Electr. Power Energy Syst. 2022, 136, 107681. [Google Scholar] [CrossRef]
- Wang, B.; Cui, X. Nonlinear modeling analysis and arc high-impedance faults detection in active distribution networks with neutral grounding via petersen coil. IEEE Trans. Smart Grid 2022. [Google Scholar] [CrossRef]
- Gajula, K.; Herrera, L. Detection and localization of series arc faults in DC microgrids using Kalman filter. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 2589–2596. [Google Scholar] [CrossRef]
- Lee, C.-K.; Chang, S.J. A Method of fault localization within the blind spot using the hybridization between TDR and wavelet transform. IEEE Sens. J. 2021, 21, 5102–5110. [Google Scholar] [CrossRef]
- Sedighi, A.-R.; Haghifam, M.-R.; Malik, O.P.; Ghassemian, M.-H. High impedance fault detection based on wavelet transform and statistical pattern recognition. IEEE Trans. Power Deliv. 2005, 20, 2414–2421. [Google Scholar] [CrossRef]
- Lima, E.M.; Junqueira, C.M.; Brito, N.S.; Souza, B.A.; Coelho, R.A.; Medeiros, H.G. High impedance fault detection method based on the short-time Fourier transform. IET Gener. Transm. Distrib. 2018, 12, 2577–2584. [Google Scholar] [CrossRef]
- Eskandari, A.; Milimonfared, J.; Aghaei, M. Fault detection and classification for photovoltaic systems based on hierarchical classification and machine learning technique. IEEE Trans. Ind. Electron. 2021, 58, 12750–12759. [Google Scholar] [CrossRef]
- Rai, K.; Hojatpanah, F.; Ajaei, F.B.; Grolinger, K. Deep learning for high-impedance fault detection: Convolutional autoencoders. Energies 2021, 14, 3623. [Google Scholar] [CrossRef]
- Cui, Q.; El-Arroudi, K.; Weng, Y. A feature selection method for high impedance fault detection. IEEE Trans. Power Deliv. 2019, 34, 1203–1215. [Google Scholar] [CrossRef] [Green Version]
- Ohtaka, T.; Kertesz, V.; Smeets, R. Novel black-box arc model validated by high-voltage circuit breaker testing. IEEE Trans. Power Deliv. 2018, 33, 1835–1844. [Google Scholar] [CrossRef]
- Khakpour, A.; Franke, S.; Gortschakow, S.; Uhrlandt, D.; Methling, R.; Weltmann, K.-D. An improved arc model based on the arc diameter. IEEE Trans. Power Deliv. 2016, 31, 1335–1341. [Google Scholar] [CrossRef]
- Guo, M.-F.; Cai, W.-Q.; Zheng, Z.-Y.; Hui, W. Fault phase selection method based on single-phase flexible arc suppression device for asymmetric distribution networks. IEEE Trans. Power Deliv. 2022. [Google Scholar] [CrossRef]
- Parise, G.; Martirano, L.; Laurini, M. Simplified arc-fault model: The reduction factor of the arc current. IEEE Trans. Ind. Appl. 2013, 49, 1703–1710. [Google Scholar] [CrossRef]
- Kizilcay, M.; Pniok, T. Digital simulation of fault arcs in power systems. Eur. Trans. Electr. Power 1991, 1, 55–60. [Google Scholar] [CrossRef]
- Barszcz, T.; Randall, R.B. Application of spectral kurtosis for detection of a tooth crack in the planetary gear of a wind turbine. Mech. Syst. Signal Proc. 2009, 23, 1352–1365. [Google Scholar] [CrossRef]
- Wu, J.; Qiu, H.; Xu, J.; Zhou, F.; Dai, K.; Yang, C.; Lv, D. Quantifying harmonic responsibilities based on kurtosis detection principle of amplitude fluctuations. IEEE Access 2018, 6, 64292–64300. [Google Scholar] [CrossRef]
- Tian, J.; Morillo, C.; Azarian, M.H.; Pecht, M. Motor bearing fault detection using spectral kurtosis-based feature extraction coupled with K-nearest neighbor distance analysis. IEEE Trans. Ind. Electron. 2016, 63, 1793–1803. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Arc Parameter | Designed Value | Arc Parameter | Designed Value |
|---|---|---|---|
| 212,900 | 4842 | ||
| −693,300 | 5197 | ||
| 685,500 | 5500 | ||
| −143,000 | −2619 | ||
| 7000 | −2963 | ||
| 5000 | −6500 | ||
| 0.003 | 0.001 | ||
| 0.002 | 0.01 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hyun, S.-Y.; Hong, J.-S.; Yun, S.-Y.; Kim, C.-H.; Lee, Y. Arc Modeling and Kurtosis Detection of Fault with Arc in Power Distribution Networks. Appl. Sci. 2022, 12, 2777. https://doi.org/10.3390/app12062777
Hyun S-Y, Hong J-S, Yun S-Y, Kim C-H, Lee Y. Arc Modeling and Kurtosis Detection of Fault with Arc in Power Distribution Networks. Applied Sciences. 2022; 12(6):2777. https://doi.org/10.3390/app12062777
Chicago/Turabian StyleHyun, Seung-Yoon, Ji-Song Hong, Sang-Yun Yun, Chang-Hwan Kim, and Youngwoo Lee. 2022. "Arc Modeling and Kurtosis Detection of Fault with Arc in Power Distribution Networks" Applied Sciences 12, no. 6: 2777. https://doi.org/10.3390/app12062777