
Reliability Uncertainty Analysis Method for Aircraft Electrical Power System Design Based on Variance Decomposition


Abstract
:1. Introduction
2. Basics of AEPS Reliability Analysis
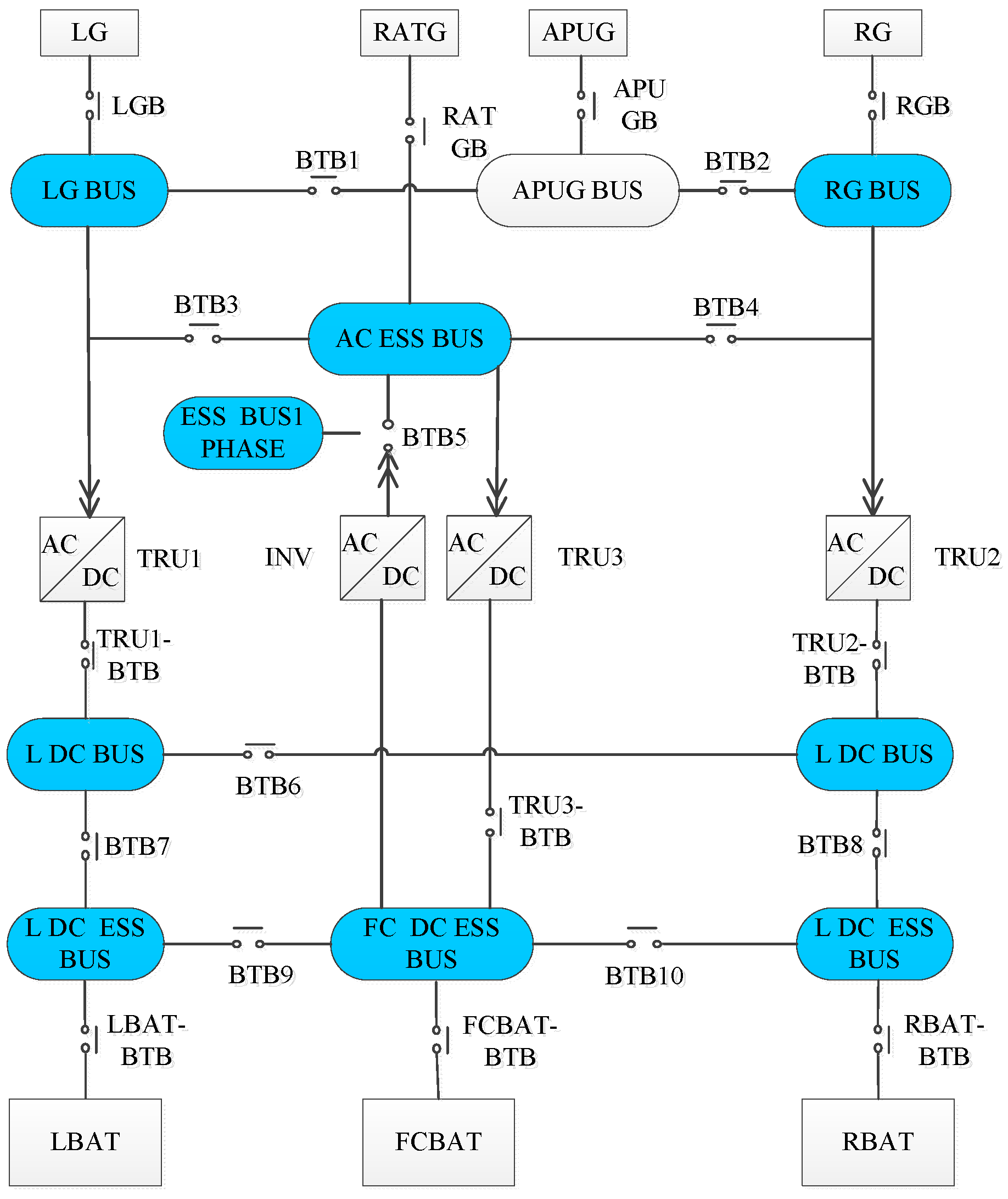
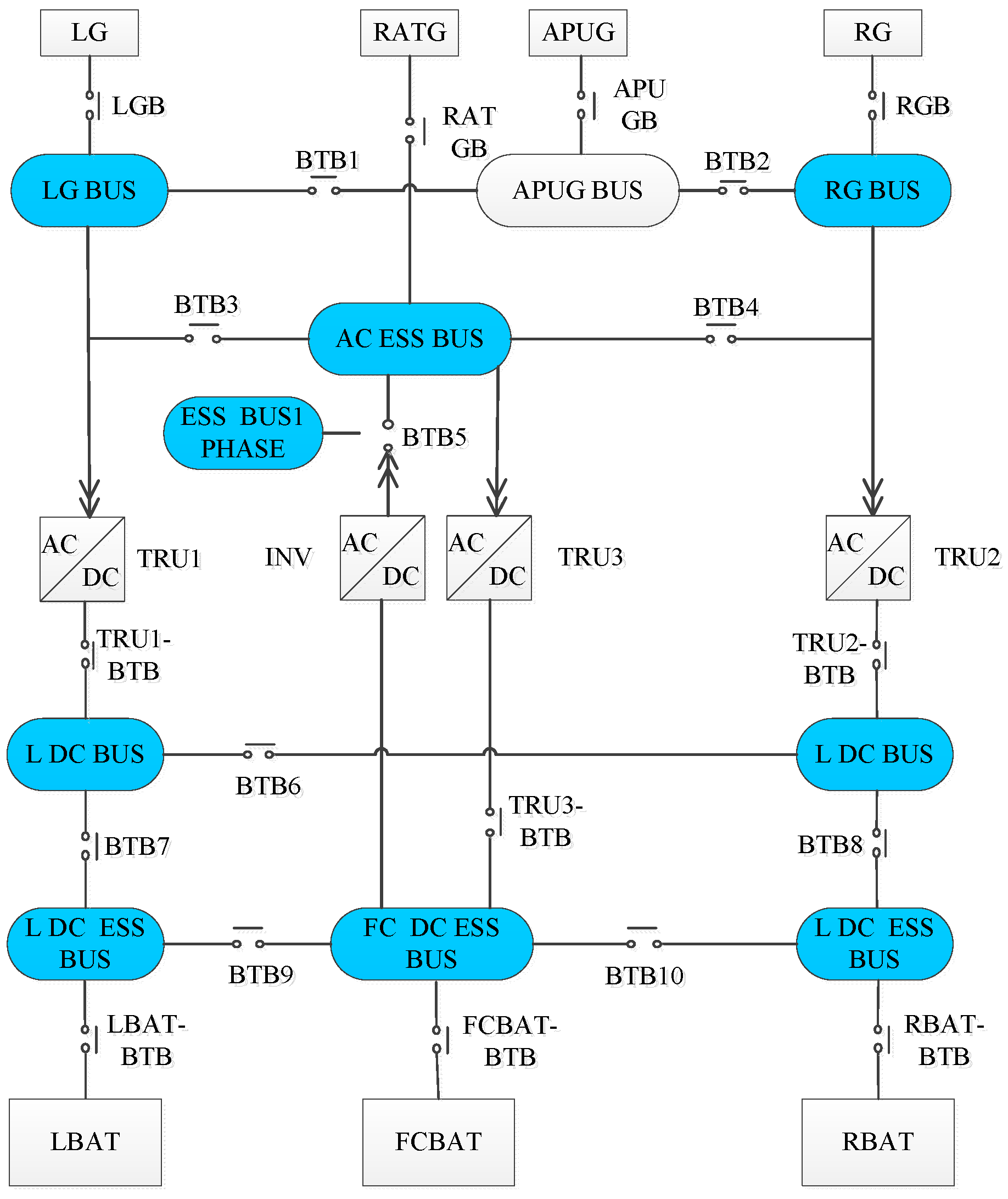
2.1. The Architecture of AEPS in the Design Stage
2.2. AEPS Reliability Design
3. Importance Measure Index and Calculation Method
3.1. Importance Measure Index
3.2. Calculation Method
| Algorithm 1: Importance_Calculation (Lanbuda[][], Distribution_type[], s, Path_set[][], T, RELI_var[]) |
| //Input: array Lanbuda with size SN, Distribution_type with size N, Path_sets with size Num N, variable s and T. N is the component number in the MPSs of sink node s. S is the max number of parameters that used to describe the probability distribution of each component’s failure rate, e.g., there are two components in the MPSs of sink node s, and the failure rates of the first and the second component follow lognormal and triangular distributions, respectively, which are described with two and three parameters in separate, so S = 3. The ith element represents the distribution type of component i’s failure rate, and the ith column of Lanbuda stores the probability distribution parameters of node i’s failure rate. Num represents the number of MPSs of sink node s and the ith row of Path_sets stores the components in the ith MPS. T represents system time. //Output: array RELI_var with size N. Its ith element represents component i’s importance degree that measures the contribution to the uncertainty of node s’s power supply reliability. 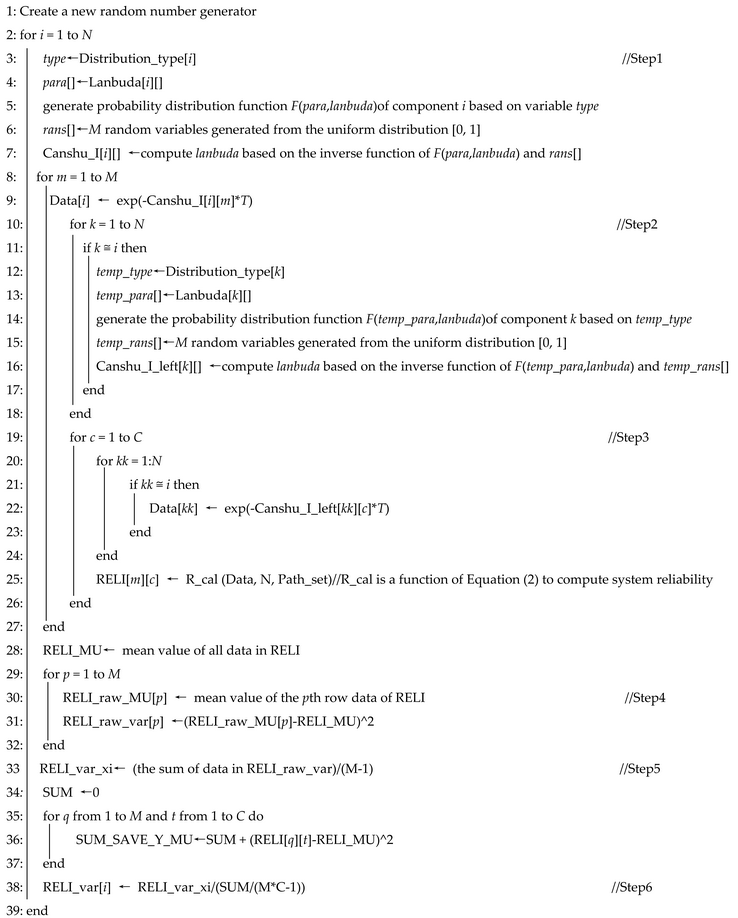 |
4. Case Studies
4.1. Uncertainty Analysis of Series-Parallel Systems
4.1.1. Case Description
4.1.2. Calculation and Analysis
4.2. Reliability Uncertainty Analysis on an AEPS
4.2.1. Case Description
4.2.2. Calculation and Analysis
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Buticchi, G.; Costa, L.; Liserre, M. Improving system efficiency for the more electric aircraft: A look at dc\/dc converters for the avionic onboard dc microgrid. IEEE Ind. Electron. Mag. 2017, 11, 26–36. [Google Scholar] [CrossRef]
- Barzkar, A.; Ghassemi, M. Electric power systems in more and all electric aircraft: A review. IEEE Access 2020, 8, 169314–169332. [Google Scholar] [CrossRef]
- Pandian, G.; Pecht, M.; Enrico, Z.I.O.; Hodkiewicz, M. Data-driven reliability analysis of Boeing 787 Dreamliner. Chin. J. Aeronaut. 2020, 33, 1969–1979. [Google Scholar] [CrossRef]
- Denning, S. What went wrong at Boeing. Strategy Leadersh. 2013, 41, 36–41. [Google Scholar] [CrossRef] [Green Version]
- Boeing 787 Makes Emergency Landing in Japan over Battery. 2013. Available online: https://www.cbsnews.com/news/boeing-787-makes-emergency-landing-in-japan-over-battery/ (accessed on 21 November 2021).
- Boeing 787 Probe Far from Complete. 2013. Available online: https://www.chinadaily.com.cn/world/2013-01/25/content_16173038.htm (accessed on 21 November 2021).
- Wang, W. Chinese Authorities Keep Close Tabs on Dreamliner Woes. 2013. Available online: http://www.chinadaily.com.cn/business/2013-01/18/content_16138334.htm (accessed on 21 November 2021).
- Keshavarzi, E.; McIntire, M.; Goebel, K.; Tumer, I.Y.; Hoyle, C. Resilient system design using cost-risk analysis with functional models. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. American Society of Mechanical Engineers (ASME), Cleveland, OH, USA, 6–9 August 2017. [Google Scholar]
- Menu, J.; Nicolai, M.; Zeller, M. Designing Fail-Safe Architectures for Aircraft Electrical Power Systems. In Proceedings of the 2018 AIAA/IEEE Electric Aircraft Technologies Symposium (EATS), Cincinnati, OH, USA, 12–14 July 2018. [Google Scholar]
- Alves, G.; Marques, D.; Silva, I.; Guedes, L.A.; da Silva, M.D.G. A methodology for dependability evaluation of smart grids. Energies 2019, 12, 1817. [Google Scholar] [CrossRef] [Green Version]
- Cai, L.; Zhang, L.; Yang, S.; Wang, L. Reliability assessment and analysis of large aircraft power distribution systems. Acta Aeronaut. Astronaut. Sin. 2011, 32, 1488–1496. [Google Scholar]
- Kritzinger, D. Aircraft System Safety: Military and Civil Aeronautical Application; Woodhead Publishing: Cambridge, UK, 2006. [Google Scholar]
- Telford, R.D.; Galloway, S.J.; Burt, G.M. Evaluating the reliability & availability of more-electric aircraft power systems. In Proceedings of the 2012 47th International Universities Power Engineering Conference (UPEC), Uxbridge, UK, 4–7 September 2012. [Google Scholar]
- Zhao, Y.; Che, Y.; Lin, T.; Wang, C.; Liu, J.; Xu, J.; Zhou, J. Minimal cut sets-based reliability evaluation of the more electric aircraft power system. Math. Probl. Eng. 2018, 2018, 9461823. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.; Wu, H.; Cai, J.; Shi, X. Reliability analysis for electric power systems of more-electric aircraft based on the minimal path set. J. Comput. Methods Sci. Eng. 2019, 19, 1017–1026. [Google Scholar] [CrossRef]
- Zhang, Y.; Kurtoglu, T.; Tumer, I.Y.; O’Halloran, B. System-Level Reliability Analysis for Conceptual Design of Electrical Power Systems. In Proceedings of the Conference on Systems Engineering Research (CSER), Redondo Beach, CA, USA, 15–16 April 2011. [Google Scholar]
- Wang, Y.; Yang, M.; Miao, Z.; Dong, X. A Reliability Modelling Method for Aircraft Electrical Power System Based on Probability Network. In Proceedings of the 2018 5th International Conference on Mathematics and Computers in Sciences and Industry (MCSI), Corfu, Greece, 25–27 August 2018. [Google Scholar]
- Kong, X.; Wang, J.; Zhang, Z. Reliability analysis of aircraft power system based on Bayesian network and common cause failure. Acta Aeronaut. Astronaut. Sin. 2020, 41, 70–279. [Google Scholar]
- Han, L.; Wang, Y.B.; Zhang, Y.; Lu, C.; Fei, C.W.; Zhao, Y.J. Competitive cracking behavior and microscopic mechanism of Ni-based superalloy blade respecting accelerated CCF failure. Int. J. Fatigue 2021, 150, 106306. [Google Scholar] [CrossRef]
- Zio, E. System Reliability and Risk Analysis: The Monte Carlo Simulation Method for System Reliability and Risk Analysis; Springer: London, UK, 2013; pp. 7–17. [Google Scholar]
- Baraldi, P.; Zio, E.; Compare, M. A method for ranking components importance in presence of epistemic uncertainties. J. Loss Prev. Process Ind. 2009, 22, 582–592. [Google Scholar] [CrossRef]
- Recalde, A.A.; Bozhko, S.; Atkin, J.; Sumsurooah, S. A DC Power System Testbed for a More Electric Aircraft Application. In Proceedings of the AIAA Propulsion and Energy 2021 Forum, Denver, CO, USA, 11–13 August 2021; p. 3309. [Google Scholar] [CrossRef]
- Zafiropoulo, E.P.; Dialynas, E.N. Reliability and cost optimization of electronic devices considering the component failure rate uncertainty. Reliab. Eng. Syst. Saf. 2004, 84, 271–284. [Google Scholar] [CrossRef]
- Blanks, H.S. Arrhenius and the temperature dependence of non-constant failure rate. Qual. Reliab. Eng. Int. 1990, 6, 259–265. [Google Scholar] [CrossRef]
- Pham, H. Handbook of Reliability Engineering; Springer: London, UK, 2003. [Google Scholar]
- Luo, H.; Tian, Z.; Tian, C.; Zhang, W. Aircraft Design Manual: Design for Reliability, Maintainability; Aviation Industry Press: Beijing, China, 1999. [Google Scholar]
- Modarres, M.; Kaminskiy, M.P.; Krivtsov, V. Reliability Engineering and Risk Analysis: A Practical Guide, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Elsayed, E.A. Reliability Engineering; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Fei, C.W.; Liu, H.T.; Liem, R.P.; Choy, Y.S.; Han, L. Hierarchical model updating strategy of complex assembled structures with uncorrelated dynamic modes. Chin. J. Aeronaut. 2022, 35, 281–296. [Google Scholar] [CrossRef]
- Lu, C.; Fei, C.W.; Feng, Y.W.; Zhao, Y.J.; Dong, X.W. Probabilistic analyses of structural dynamic response with modified Kriging-based moving extremum framework. Eng. Fail. Anal. 2021, 125, 105398. [Google Scholar] [CrossRef]
- Falck, J.; Felgemacher, C.; Rojko, A.; Liserre, M.; Zacharias, P. Reliability of power electronic systems: An industry perspective. IEEE Ind. Electron. Mag. 2018, 12, 24–35. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Gao, X.; Cai, Y.; Yang, M.; Li, S.; Li, Y. Reliability evaluation for aviation electric power system in consideration of uncertainty. Energies 2020, 13, 1175. [Google Scholar] [CrossRef] [Green Version]
- Cao, J.; Qi, X.; Li, L. Reliability and sensitivity analysis of more-electric aircraft based on cross entropy. Electron. Lett. 2020, 56, 428–431. [Google Scholar] [CrossRef]
- Qi, X.; Cao, J.; Li, X. Reliability Evaluation of Power Supply for More-Electric-Aircraft Based on Information Entropy. In Proceedings of the 2019 5th Asia Conference on Mechanical Engineering and Aerospace Engineering, Wuhan, China, 14 August 2019; EDP Sciences: Les Ulis Cedex, France, 2019; Volume 288, p. 02002. [Google Scholar]
- Li, X.; Huang, H.; Huang, P.; Li, Y. Reliability analysis and fault diagnosis of power system based on dynamic Bayesian network. J. Univ. Electron. Sci. Technol. China 2021, 50, 603–608. [Google Scholar]
- Xu, Q.; Xu, Y.; Tu, P.; Zhao, T.; Wang, P. Systematic reliability modeling and evaluation for on-board power systems of more electric aircrafts. IEEE Trans. Power Syst. 2019, 34, 3264–3273. [Google Scholar] [CrossRef]
- Zio, E. Monte Carlo Simulation: The Method. In The Monte Carlo Simulation Method for System Reliability and Risk Analysis; Springer Series in Reliability Engineering; Springer: London, UK, 2013. [Google Scholar]
- Recalde, A.A.; Bozhko, S.; Atkin, J. Design of more electric aircraft dc power distribution architectures considering reliability performance. In Proceedings of the 2019 AIAA/IEEE Electric Aircraft Technologies Symposium (EATS), Indianapolis, IN, USA, 22–24 August 2019. [Google Scholar]
- Recalde, A.A.; Atkin, J.A.; Bozhko, S.V. Optimal design and synthesis of MEA power system architectures considering reliability specifications. IEEE Trans. Transp. Electrif. 2020, 6, 1801–1818. [Google Scholar] [CrossRef]
- Bozhko, S.V.; Wu, T.; Hill, C.I.; Asher, G.M. Accelerated simulation of complex aircraft electrical power system under normal and faulty operational scenarios. In Proceedings of the IECON 2010-36th Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 7–10 November 2010. [Google Scholar]
- Jansen, R.; Bowman, C.; Jankovsky, A.; Dyson, R.; Felder, J. Overview of NASA electrified aircraft propulsion (EAP) research for large subsonic transports. In Proceedings of the 53rd AIAA/SAE/ASEE Joint Propulsion Conference, Atlanta, GA, USA, 10–12 July 2017. [Google Scholar]
- Jensen, D.C.; Tumer, I.Y.; Kurtoglu, T. Design of an electrical power system using a functional failure and flow state logic reasoning methodology. In Proceedings of the Annual Conference of the PHM Society, San Diego, CA, USA, 1 January 2009. [Google Scholar]
- Jones, R.W.; Grice, C.; Clements, R. Safety and reliability driven design for the more electric aircraft. In Proceedings of the 2019 14th IEEE Conference on Industrial Electronics and Applications (ICIEA), Xi’an, China, 19–21 June 2019. [Google Scholar]
- McFarland, J.M. Variance decomposition for statistical quantities of interest. J. Aerosp. Inf. Syst. 2015, 12, 204–218. [Google Scholar] [CrossRef]
- McFarland, J.; DeCarlo, E. A Monte Carlo framework for probabilistic analysis and variance decomposition with distribution parameter uncertainty. Reliab. Eng. Syst. Saf. 2020, 197, 106807. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case 1 | Case 2 | Case 3 | Case 4 | |
|---|---|---|---|---|
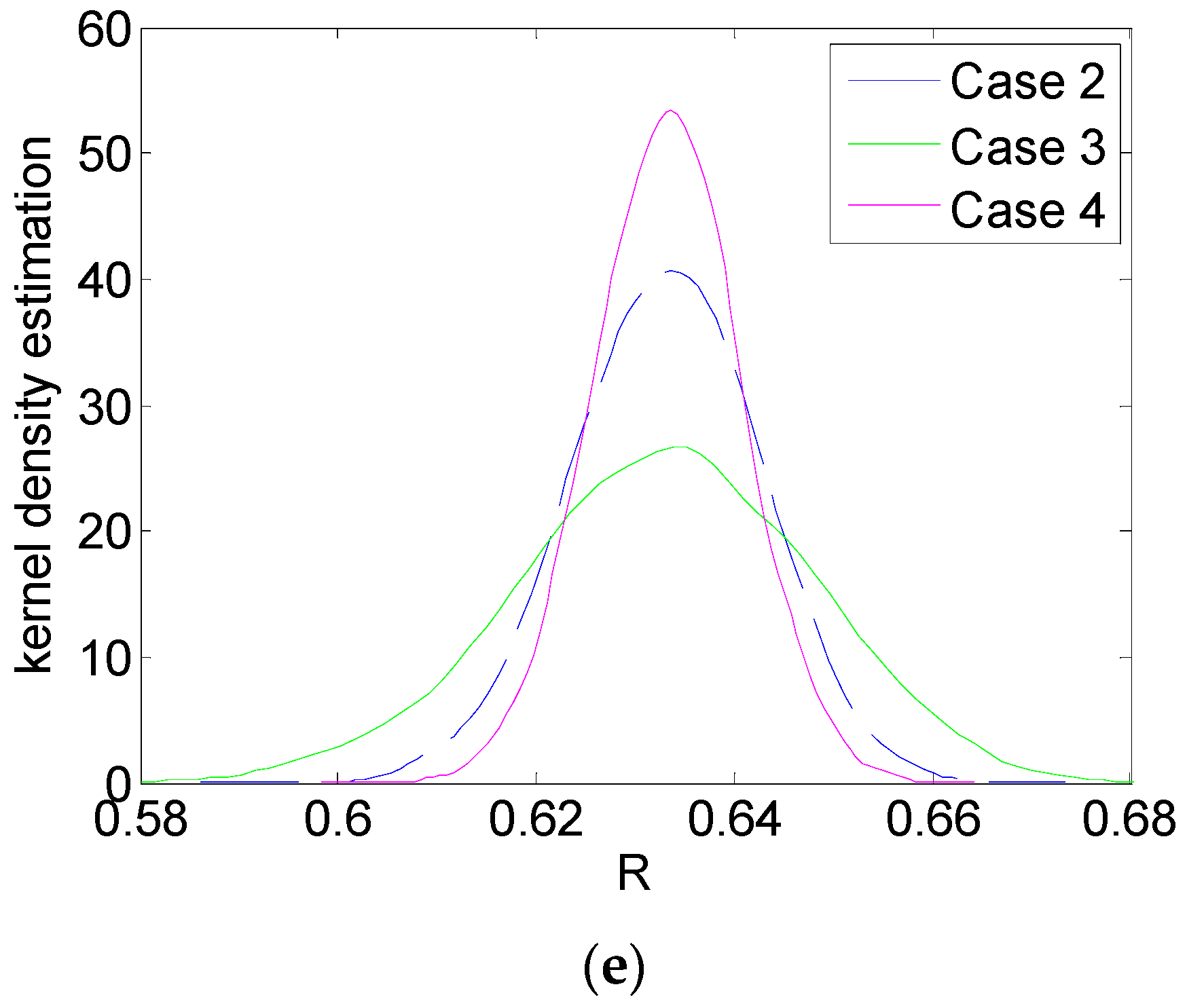
| Mean | 0.6335 | 0.6332 | 0.6327 | 0.6332 |
| Variance | 8.7879 × 10−28 | 9.0439 × 10−5 | 2.3694 × 10−4 | 5.7243 × 10−5 |
| Confidence intervals | [0.6335, 0.6335] | [0.6144, 0.6519] | [0.6016, 0.6612] | [0.6182, 0.6477] |
| Case 1 | Case 2 | Case 3 | Case 4 | |
|---|---|---|---|---|
| 0.0000 | 0.0124 | 0.0059 | 0.0199 | |
| 0.0000 | 0.0121 | 0.0207 | 0.0055 | |
| 0.0000 | 0.4865 | 0.1905 | 0.7713 | |
| 0.0000 | 0.4894 | 0.7961 | 0.1915 |
| Component | Function | Mode of λmode (1/H) | Low Limit of λlower | Upper Limit of λupper |
|---|---|---|---|---|
| TB/GB | Current Relay, Contactor and Breaker | 1.33 × 10−5 | 1.0 × 10−5 | 9.9 × 10−5 |
| Generator | AC Power Source | 5.56 × 10−5 | 1.0 × 10−5 | 9.9 × 10−5 |
| AC BUS | Direct power distribution to AC loads | 5.00 × 10−6 | 1.0 × 10−6 | 9.9 × 10−6 |
| Component | LG | LGB | LG BUS | BTB1 | APUG BUS | APU GB | APUG | BTB2 | RG BUS | RGB | RG |
| Importance | 0.097 | 0.1306 | 0.3803 | 0.3636 | 0.0031 | 0.0061 | 0.0053 | 0.0026 | 0.0006 | 0.0029 | 0.0024 |
| Ranking | 4 | 3 | 1 | 2 | 7 | 5 | 6 | 9 | 11 | 8 | 10 |
| Solution | Improvement Component | Improvement Measures |
|---|---|---|
| Solution 1 | LG BUS | Reselect component LG BUS of less fluctuation in failure rate with flight environment changes to replace the original one. |
| Solution 2 | BTB1 | Reselect component BTB1 of less fluctuation in failure rate with flight environment changes to replace the original one. |
| Solution 3 | BTB1, LG BUS | Reselect both components BTB1 and LG BUS of less fluctuation in failure rate with flight environment changes to replace the original ones. |
| Solution 4 | LG, LGB, BTB1, and LG BUS | Reselect components LG, LGB, BTB1 and LG BUS of less fluctuation in failure rate with flight environment changes to replace the original ones. |
| Solution 5 | No. 5 to No. 11 | Reselect components of No. 5 to No. 11 which have less fluctuation in failure rate with flight environment changes to replace the original ones. |
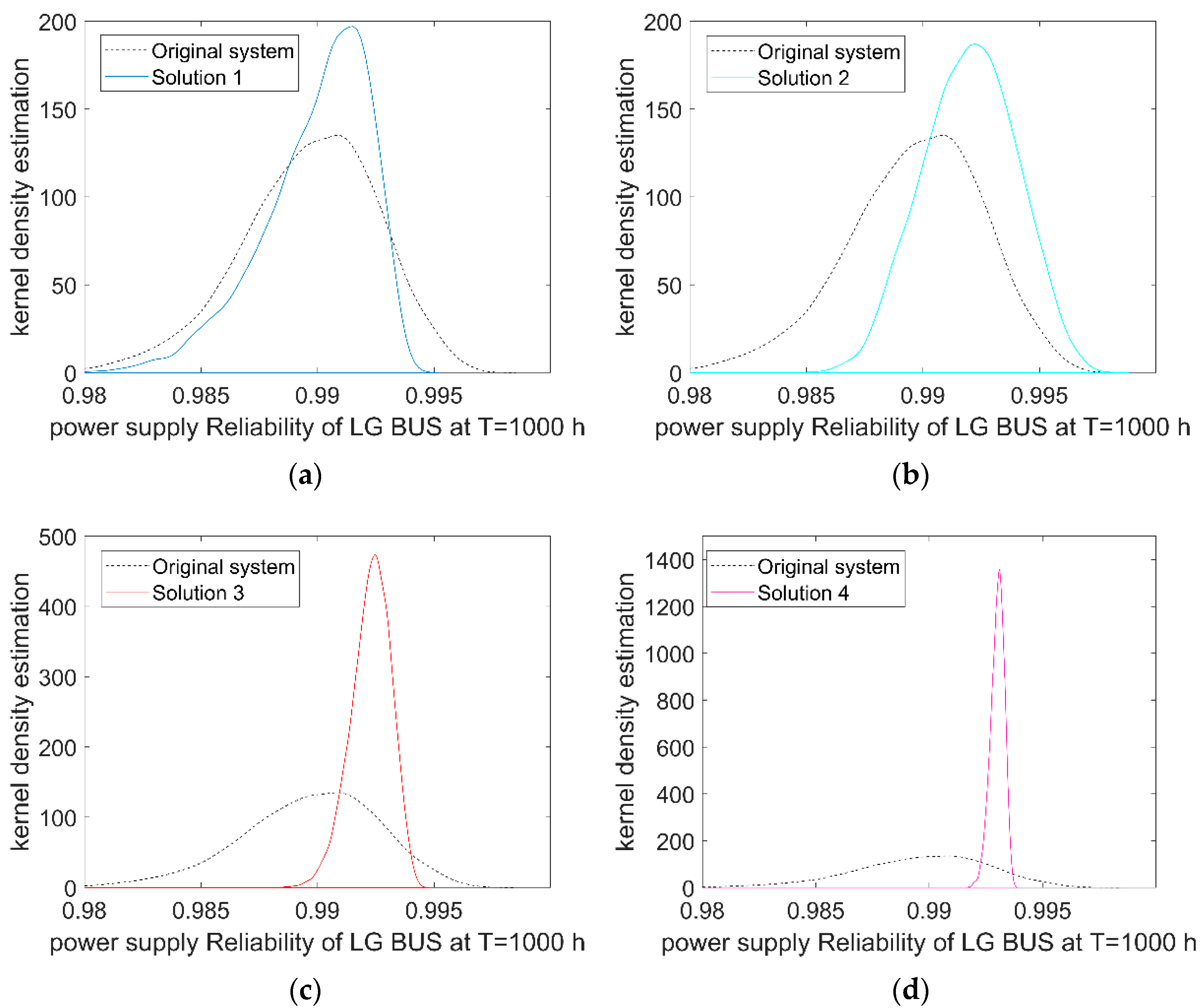
| Solution | Importance Degree | Mean Value | Variance | Confidence Intervals | Reduction Degree | Efficiency Ranking |
|---|---|---|---|---|---|---|
| Original | - | 0.9896 | 8.6910 × 10−6 | [0.9831, 0.9947] | - | - |
| Solution 1 | 0.38 | 0.9899 | 5.28320 × 10−6 | [0.9844, 0.9932] | 39.21% | 3 |
| Solution 2 | 0.36 | 0.9920 | 5.53452 × 10−6 | [0.9880, 0.9957] | 36.32% | 4 |
| Solution 3 | 0.74 | 0.9923 | 2.29312 × 10−6 | [0.9904, 0.9937] | 73.62% | 2 |
| Solution 4 | 0.97 | 0.9930 | 2.49012 × 10−7 | [0.9923, 0.9935] | 97.13% | 1 |
| Solution 5 | 0.023 | 0.9902 | 8.39620 × 10−6 | [0.9841, 0.9951] | 3.39% | 5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Cai, Y.; Hu, X.; Gao, X.; Li, S.; Li, Y. Reliability Uncertainty Analysis Method for Aircraft Electrical Power System Design Based on Variance Decomposition. Appl. Sci. 2022, 12, 2857. https://doi.org/10.3390/app12062857
Wang Y, Cai Y, Hu X, Gao X, Li S, Li Y. Reliability Uncertainty Analysis Method for Aircraft Electrical Power System Design Based on Variance Decomposition. Applied Sciences. 2022; 12(6):2857. https://doi.org/10.3390/app12062857
Chicago/Turabian StyleWang, Yao, Yuanfeng Cai, Xiaomin Hu, Xinqin Gao, Shujuan Li, and Yan Li. 2022. "Reliability Uncertainty Analysis Method for Aircraft Electrical Power System Design Based on Variance Decomposition" Applied Sciences 12, no. 6: 2857. https://doi.org/10.3390/app12062857
APA StyleWang, Y., Cai, Y., Hu, X., Gao, X., Li, S., & Li, Y. (2022). Reliability Uncertainty Analysis Method for Aircraft Electrical Power System Design Based on Variance Decomposition. Applied Sciences, 12(6), 2857. https://doi.org/10.3390/app12062857