
Implementation of the Modern Immersive Learning Model CPLM †



Abstract
:1. Introduction
- -
- To teach STEAM
- -
- To develop learning skills such as scientific inquiry, engineering design, problem solving, creative thinking, and teamwork;
- -
- To motivate students for science and engineering [9].
2. Materials and Methods
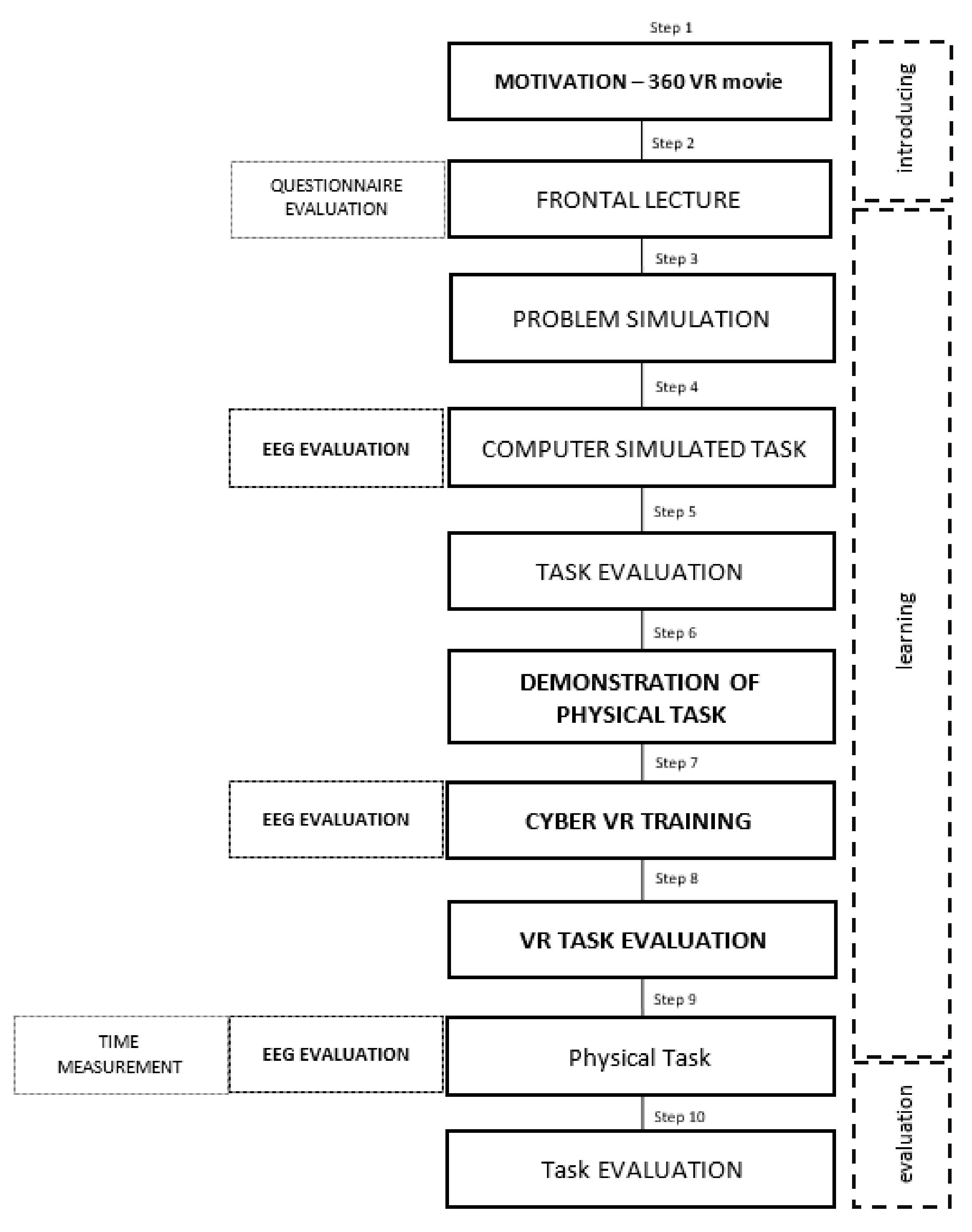
2.1. Cyber–Physical Learning Model
2.2. Methods
3. Results
3.1. Questionnaire Evaluation
3.2. Procedural Time Measurements
3.3. Evaluation of CPLM with Brainwave Measurements
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Burns, T. Trends Shaping Education 2019; OECD: Paris, France, 2019. [Google Scholar]
- Chowdhury, T.; Holbrook, J.; Rannikmäe, M. Addressing Sustainable Development: Promoting Active Informed Citizenry through Trans-Contextual Science Education. Sustainability 2020, 12, 8. [Google Scholar]
- Holden, J.; Lander, E. Report to the president: Engage to excel: Producing one million additional college graduates with degrees in science, technology, engineering, and mathematics. In Executive Office of the President President’s Council of Advisors on Science and Technology; Eric: Washington, DC, USA, 2012. [Google Scholar]
- Wu, J.; Atit, K.; Ramey, K.E.; Flanagan-Hall, G.A.; Vondracek, M.; Jona, K.; Uttal, D.H. Investigating Students’ Learning Through Co-designing with Technology. J. Sci. Educ. Technol. 2021, 30, 529–538. [Google Scholar] [CrossRef]
- Gao, Z.; Wanyama, T.; Singh, I.; Gadhrri, A.; Schmidt, R. From Industry 4.0 to Robotics 4.0—A Conceptual Framework for Collaborative and Intelligent Robotic System. In Procedia Manufacturing 46; Elsevier: Amsterdam, The Netherlands, 2020; pp. 591–599. [Google Scholar]
- Goel, R.; Gupta, P. Robotics and Industry 4.0; Advances in Science, Technology & Innovation; Springer: Berlin, Germany, 2020. [Google Scholar]
- Altin, H.; Pedaste, M. Learning approaches to applying robotics in science education. J. Balt. Sci. 2013, 12, 365–377. [Google Scholar] [CrossRef]
- Kim, H.; Choi, H.; Han, J.; So, H.J. Enhancing teachers’ ICT capacity for the 21st century learning environment: Three cases of teacher education in Korea. Australas. J. Educ. Technol. 2012, 28, 6. [Google Scholar] [CrossRef] [Green Version]
- Barak, M.; Assal, M. Robotics and STEM learning: Students’ achievements in assignments according to the P3 Task Taxonomy—Practice, problem solving, and projects. Int. J. Technol. Des. Educ. 2016, 28, 121–144. [Google Scholar] [CrossRef]
- Román-Ibáñez, V.; Pujol-López, F.A.; Mora-Mora, H.; Pertegal-Felices, M.L.; Jimeno-Morenilla, A. A low-cost immersive virtual reality system for teaching robotic manipulators programming. Sustainability 2018, 10, 1102. [Google Scholar] [CrossRef] [Green Version]
- Ghullam Jillani, M.S.A.; Mussarat, Y.; Lawrence, F. Reviews of the Implications of VR/AR Health Care Applications in Terms of Organizational and Societal Change; Scrivener Publishing LLC: Beverly, MA, USA, 2018. [Google Scholar]
- Xundong, P.; Xinyu, C.; Hong, H.; Yu, Z.; Hang, Z.; Dan, L. Virtual Assembly of Educational Robot Parts Based on VR Technology. In Proceedings of the 2019 IEEE 11th International Conference on Engineering Education, Kanazawa, Japan, 6–7 November 2019. [Google Scholar]
- Wang, Y.; Guo, S.; Li, Y.; Tamiya, T.; Song, Y. Design and evaluation of safety operation VR training system for robotic catheter surgery. Med. Biol. Eng. Comput. 2018, 56, 25–35. [Google Scholar] [CrossRef]
- Volmer, B.; Verhulst, A.; Inami, M.; Drogemuller, A.; Sugimoto, M.; Thomas, B.H. Towards Robot Arm Training in Virtual Reality Using Partial Least Squares Regression. In Proceedings of the 2019 IEEE Conference on Virtual Reality and 3D User Interfaces (VR), Osaka, Japan, 23–27 March 2019; pp. 1209–1210. [Google Scholar]
- Johnson-Glenberg, M.C. Immersive VR and Education: Embodied Design Principles That Include Gesture and Hand Controls. Front. Robot. AI 2018, 5, 81. [Google Scholar] [CrossRef] [Green Version]
- Tomić, M.K.; Aberšek, B.; Pesek, I. GeoGebra as a spatial skills training tool among science, technology engineering and mathematics students. Comput. Appl. Eng. Educ. 2019, 27, 1506–1517. [Google Scholar] [CrossRef]
- Lekan, S. Virtual Environments, Render Realism and Their Effect on Spatial Memory. Ph.D. Thesis, University of Washington, Seattle, WA, USA, 2016. [Google Scholar]
- Cummings, J.J.; Bailenson, J.N. How Immersive Is Enough? A Meta-Analysis of the Effect of Immersive Technology on User Presence. Media Psychol. 2016, 19, 272–309. [Google Scholar] [CrossRef]
- Bottino, R.M.; Freina, L.; Ott, M.; Costa, F. Cloud-mobile Assistive Technologies for People with Intellectual Impairments. In Proceedings of the 5th International Conference on Digital Health 2015, Florence, Italy, 18–20 May 2015. [Google Scholar]
- Jensen, H.; Konradsen, H.; Lemoine, J.; Levy, C.R.; Ny, P.; Khalaf, A.; Torres, S. Factor structure and psychometric properties of the Body Appreciation Scale-2 among adolescents and young adults in Danish, Portuguese, and Swedish. Body Image 2018, 26, 1–9. [Google Scholar]
- Kolloffel, B.; Eysink, T.H.S.; De Jong, T. Comparing the effects of representational tools in collaborative and individual inquiry learning. Int. J. Comput. Collab. Learn. 2011, 6, 223–251. [Google Scholar] [CrossRef] [Green Version]
- Wong, L.J.C. Next Generation Sequencing; Springer: New York, NY, USA, 2013. [Google Scholar]
- Potkonjak, V.; Gardner, M.; Callaghan, V.; Mattila, P.; Guetl, C.; Petrović, V.M.; Jovanović, K. Virtual laboratories for education in science, technology, and engineering: A review. Comput. Educ. 2016, 95, 309–327. [Google Scholar] [CrossRef] [Green Version]
- Goi, M.T.; Goi, C.L.; Wong, D. Constructing a brand identity scale for higher education institutions. J. Mark. High. Educ. 2014, 24, 59–74. [Google Scholar] [CrossRef]
- Makransky, G.; Terkildsen, T.; Mayer, R.E. Adding immersive virtual reality to a science lab simulation causes more presence but less learning. Learn. Instr. 2019, 60, 225–236. [Google Scholar]
- Salzman, M.; Dede, C.; Loftin, R.B. Proceedings of the SIGCHI Conference on Human Factors in Computing Systems the CHI Is the Limit—CHI ‘99-VR’s Frames of Reference; ACM Press the SIGCHI Conference: Pittsburgh, PA, USA, 1999. [Google Scholar]
- Reeves, S.M.; Crippen, K.J. Virtual Laboratories in Undergraduate Science and Engineering Courses: A Systematic Review, 2009–2019. J. Sci. Educ. Technol. 2020, 30, 16–30. [Google Scholar] [CrossRef]
- Martín-Gutiérrez, J.; Mora, C.E.; Añorbe-Díaz, B.; González-Marrero, A. Virtual Technologies Trends in Education. Eurasia J. Math. Sci. Technol. Educ. 2017, 13, 469–486. [Google Scholar]
- Jiang, J.-R. An improved cyber-physical systems architecture for Industry 4.0 smart factories. Adv. Mech. Eng. 2018, 10, 1687814018784192. [Google Scholar] [CrossRef] [Green Version]
- The CPS Public Working Group. 2016. Available online: https://pages.nist.gov/cpspwg/ (accessed on 12 February 2021).
- Pishdad-Bozorgi, P.; Gao, X. Introduction to cyber-physical systems in the built environment. In Construction 4.0; Routledge: London, UK, 2020; pp. 23–41. [Google Scholar]
- BMBF. Forschung und Innovation fur die Menschen. In Die Hightech-Strategie 2025; Die Bundesregierung: Berlin, Germany, 2018; Available online: https://www.bmbf.de/SharedDocs/Publikationen/de/bmbf/1/31431_Forschung_und_Innovation_fuer_die_Menschen.pdf?__blob=publicationFile&v=6 (accessed on 12 February 2021).
- COGJ. Report on the 5th Science and Technology Basic Plan; Council for Science, Technology and Innovation Cabinet Office, Government of Japan: Tokyo, Japan, 2015. [Google Scholar]
- Deguchi, A.; Hirai, C.; Matsuoka, H.; Nakano, T.; Oshima, K.; Tai, M.; Tani, S. What Is Society 5.0? Society 2020, 5, 1–23. [Google Scholar]
- Chen, C.; Wang, J. Effects of online synchronous instruction with an atention monitoring alarma mechanism on sustained attention and learning performance. Interact. Learn. Environ. 2017, 26, 427–443. [Google Scholar] [CrossRef]
- Harayama, Y. Aiming for a New Human-Centered Society. In Japan’s Science and Technology Policies for Addressing Global Social Challenges; Intelligence Ltd.: Tokyo, Japan, 2017. [Google Scholar]
- Xu, J.; Zhong, B. Review on portable EEG technology in educational research. Comput. Hum. Behav. 2018, 81, 340–349. [Google Scholar] [CrossRef]
- Sawangjai, P.; Hompoonsup, S.; Leelaarporn, P.; Kongwudhikunakorn, S.; Wilaiprasitporn, T. Consumer grade EEG Measuring Sensors as Research Tools: A Review. IEEE Sens. J. 2020, 20, 3996–4024. [Google Scholar] [CrossRef]
- Morshad, S.; Mazumder, F. Analysis of brain wave data using Neurosky Mindwave Mobile II. In Proceedings of the International Conference on Computing Advancements, Dhaka, Bangladesh, 10–12 January 2020. [Google Scholar]
- Egner, T.; Gruzelier, J. EEG Biofeedback of low beta band components: Frequency-specific effects on variables of attention and event-related brain potentials. Clin. Neurophysiol. 2004, 115, 131–139. [Google Scholar] [CrossRef]
- Anderson, J. Cognitive Psychology and Its Implications, 6th ed.; Worth Publisher: New York, NY, USA, 2004. [Google Scholar]
- Anand, K.; Ruchika, K.; Ram, S.; Iqbal, A.; Puneet, W. Alternative healing therapies in todays era. Int. J. Res. Ayurveda Pharm. 2014, 5, 394–396. [Google Scholar]
- Poltavski, D. The use of single-electrode wireless EEG in biobehavioral investigations. In Mobile Health Technologies: Methods and Protocols; Humana Press: New York, NY, USA, 2015; pp. 375–390. [Google Scholar]
- Ma, M.; Wei, C. A comparative study of children’s concentration performance on picture books: Age, gender and media forms. Interact. Learn. Environ. 2016, 8, 1922–1937. [Google Scholar] [CrossRef]
- Lin, H.; Su, S.; Chao, C.; Hsieh, C.; Tsai, S. Construction of multi-mode affective learning system: Taking affective design an example. J. Educ. Technol. Soc. 2016, 19, 132–147. [Google Scholar]
- Ghergulescu, I.; Muntean, C. A novel sensor-based methodology for learners motivation analysis in game-base learning. Interact. Comput. 2014, 26, 305–320. [Google Scholar] [CrossRef]
- Lin, C.-S.; Lai, Y.-C.; Lin, J.-C.; Wu, P.-Y.; Chang, H.-C. A novel method for concentration evaluation of reading behaviors with electrical activity recorded on the scalp. Comput. Methods Programs Biomed. 2014, 114, 164–171. [Google Scholar] [CrossRef] [PubMed]
- Wong, S.W.; Chan, R.H.; Mak, J.N. Spectral modulation of frontal EEG during motor skill acquisition: A mobile EEG study. Int. J. Psychophysiol. 2014, 91, 16–21. [Google Scholar] [CrossRef] [PubMed]
- Sun, J.C.-Y.; Yeh, K.P.-C. The effects of attention monitoring with EEG biofeedback on university students’ attention and self-efficacy: The case of anti-phishing instructional materials. Comput. Educ. 2017, 106, 73–82. [Google Scholar] [CrossRef]
- Vourvopoulos, A.; Pardo, O.M.; Lefebvre, S.; Neureither, M.; Saldana, D.; Jahng, E.; Liew, S.-L. Effects of a Brain-Computer Interface with Virtual Reality (VR) Neurofeedback: A Pilot Study in Chronic Stroke Patients. Front. Hum. Neurosci. 2019, 13, 210. [Google Scholar] [CrossRef] [Green Version]
- Aldridge, S.; Powell, M. Exploration of the ecosystem with an in-depth focus on the virtual learning environment of the future. In The Online Classroom of the Future; Drexel University: Philadelphia, PA, USA, 2018. [Google Scholar]
- Somrak, A.; Guna, J. Pregled Naprav, Tehnologij in Področij Uporabe Navidezne, Izboljšane in Mešane Resničnosti. Laboratorij za multimedijo, Fakulteta za elektrotehniko, Univerza v Ljubljani:: Ljubljana, Slovenia, 2018. [Google Scholar]
- Mazurek, K.A.; Schieber, M.H. Mirror neurons precede non-mirror neurons during action execution. J. Neurophysiol. 2019, 122, 2630–2635. [Google Scholar] [CrossRef]
- Chopra, D. Metahuman: Unleashing Your Infinite Potential, 1st ed.; Harmony: Las Vegas, NV, USA, 2019. [Google Scholar]
- Delgado, P.; Vargas, C.; Ackerman, R.; Salmerón, L. Don’t throw away your printed books: A meta-analysis on the effects of reading media on reading comprehension. Educ. Res. Rev. 2018, 25, 23–38. [Google Scholar] [CrossRef]
- Cencelj, Z.; Kordigel, A.; Aberšek, B.; Flogie, A. Role and meaning of functional science, technological and engineering literacy in problme based learning. J. Balt. Sci. 2019, 18, 132–146. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mean CG | Stdv CG | Mean EG | Stdv EG | |
|---|---|---|---|---|
| Q1 Current motivation to learn about new knowledge and technologies | 3.80 | 0.68 | 3.87 | 0.83 |
| Q2 Technology motivates me in researching and acquiring new knowledge | 3.67 | 0.98 | 3.93 | 0.70 |
| Q3 I am interested in robotics technology | 4.33 | 0.72 | 3.87 | 0.74 |
| Q4 I want to learn new robotics technology skills | 4.00 | 0.85 | 3.73 | 1.16 |
| Q5 I want to gain knowledge and skills of welding with an industrial robot | 3.73 | 1.22 | 4.00 | 1.00 |
| Mean CG | Stdv CG | Mean EG | Stdv EG | |
|---|---|---|---|---|
| Q5 I know the procedures for setting up and programming an industrial welding robot | 2.27 | 1.22 | 2.33 | 0.98 |
| Q6 I know setting up and programming an industrial welding robot | 3.71 | 1.07 | 3.47 | 0.83 |
| Q7 I can program the basic movements of an industrial robot | 4.14 | 0.86 | 3.27 | 1.28 |
| Q8 I can set and program the peripheral units of an industrial robot | 3.27 | 0.88 | 2.93 | 1.10 |
| Mean CG | Stdv CG | Mean EG | Stdv EG | |
|---|---|---|---|---|
| Q9 I have a good spatial orientation | 4.33 | 0.72 | 4.13 | 0.92 |
| Q10 I can imagine objects in three dimensions | 4.40 | 0.74 | 4.27 | 0.70 |
| Q11 In the past, I have already performed the visualization technique | 3.53 | 1.19 | 3.00 | 1.41 |
| Q12 I find it hard to get lost, it is simple to navigate the map | 4.13 | 0.92 | 3.80 | 1.08 |
| Q13 As a child I like to play games that involved assembling smaller parts into assembly | 4.27 | 0.88 | 4.53 | 0.83 |
| Q14 I imagine the movement of an industrial robot in space | 4.13 | 0.64 | 4.13 | 0.83 |
| CG Success (%) | EG Success (%) | |
|---|---|---|
| Q15 Which image rotation is correct? | 93.75 | 100 |
| Q16 Which group of shapes can we combine to get the desired shape? | 18.75 | 75.00 |
| Q17 Which pattern can we design to get the cube shown in the picture? | 43.75 | 50.00 |
| Avg CG | Stdv CG | Avg EG | Stdv EG | |
|---|---|---|---|---|
| Q18 VR technology interests me | 4.20 | 0.77 | 3.60 | 0.63 |
| Q19 VR glasses motivate me to learn about new knowledge and technologies | 3.60 | 1.06 | 3.27 | 1.44 |
| Q20 I want to use VR technology in my learning | 3.47 | 1.30 | 3.36 | 1.65 |
| Q21 I have used VR glasses in the past | 3.87 | 1.55 | 2.60 | 1.80 |
| Q22 I have already used VR glasses for educational purposes | 2.27 | 1.53 | 1.80 | 1.26 |
| Q23 I have already used VR glasses to watch 360 VR movies and cartoons | 1.87 | 1.30 | 3.36 | 1.65 |
| Q24 I provided VR-training of robotic welding | 1.00 | 0.00 | 1.00 | 0.00 |
| n = 15 CG | Time CG LLE | Time CG HLE | SLS (L, M, H) | n = 15 EG | Time EG LLE | Time EG HLE | SLS (L, M, H) |
|---|---|---|---|---|---|---|---|
| 1. | 06:38:11 | 07:59:30 | M | 16. | 05:26:38 | 07:45:17 | M |
| 2. | 05:57:32 | 06:01:21 | M | 17. | 04:57:32 | 05:56:12 | L |
| 3. | 07:12:45 | 07:59:05 | M | 18. | 06:55:13 | 06:59:26 | M |
| 4. | 04:47:09 | 05:33:54 | H | 19. | 05:12:42 | 06:27:27 | L |
| 5. | 06:01:23 | 07:55:02 | H | 20. | 06:14:24 | 07:01:23 | L |
| 6. | 05:46:32 | 06:02:22 | L | 21. | 04:42:32 | 05:48:18 | H |
| 7. | 05:30:22 | 06:05:53 | M | 22. | 04:56:16 | 06:25:10 | M |
| 8. | 05:02:26 | 05:45:23 | L | 23. | 04:59:56 | 05:25:52 | M |
| 9. | 05:37:33 | 05:10:44 | M | 24. | 04:26:52 | 07:10:48 | M |
| 10. | 05:20:32 | 06:02:33 | L | 25. | 05:10:32 | 05:55:06 | M |
| 11. | 05:38:55 | 05:57:10 | M | 26. | 05:22:15 | 06:33:22 | H |
| 12. | 05:49:31 | 06:22:55 | H | 27. | 06:32:31 | 06:59:15 | M |
| 13. | 06:22:55 | 05:59:01 | M | 28. | 04:48:38 | 05:24:04 | H |
| 14. | 06:11:04 | 06:55:57 | L | 29. | 05:26:04 | 06:04:45 | M |
| 15. | 06:23:11 | 06:56:35 | M | 30. | 06:19:29 | 06:44:02 | L |
| mean | 05:53:20 | 06:27:10 | mean | 05:40:10 | 06:20:58 |
| N | CPS-A | VR-A | CPS-M | VR-M |
|---|---|---|---|---|
| 1. | 42.41 | 41.63 | 49.62 | 40.44 |
| 2. | 56.33 | 39.07 | 65.03 | 53.41 |
| 3. | 42.82 | 52.92 | 47.81 | 73.74 |
| 4. | 48.52 | 52.30 | 59.57 | 53.64 |
| 5. | 45.74 | 66.17 | 49.06 | 46.65 |
| 6. | 46.13 | 59.81 | 57.03 | 45.03 |
| 7. | 48.87 | 79.07 | 50.87 | 54.47 |
| 8. | 39.66 | 42.40 | 79.31 | 58.70 |
| 9. | 40.18 | 57.88 | 40.41 | 45.33 |
| 10. | 55.68 | 58.10 | 59.59 | 70.47 |
| 11. | 51.13 | 42.35 | 71.20 | 64.09 |
| 12. | 57.28 | 39.38 | 51.73 | 52.55 |
| 13. | 75.22 | 52.34 | 38.65 | 42.65 |
| 14. | 38.53 | 49.11 | 38.97 | 40.46 |
| 15. | 37.20 | 39.12 | 55.27 | 58.78 |
| StD | 9.88 | 11.51 | 11.56 | 10.38 |
| Mean | 48.38 | 51.44 | 54.27 | 53.36 |
| CPS-A | VR-A | CPS-M | VR-M | |||
|---|---|---|---|---|---|---|
| Min | 37.20 | 39.07 | 38.6 | 50.44 | ||
| Max | 75.22 | 79.07 | 79.3 | 70.47 | ||
| StD | 9.88 | 11.51 | 11.5 | 10.38 | ||
| Mean | 48.38 | 51.44 | 54.2 | 53.36 | ||
| K | 2.79 | 0.78 | 0.18 | 0.43 | ||
| S | 1.44 | 0.94 | 0.61 | 0.59 | ||
| Pair | n | r | Sig. p | t | Sig. P 2- tailed | |
| Attention Computer Problem Solving (A-CPS) Attention VR (A-VR) | 15 | 0.02 | 0.94 | −0.79 | 0.44 | |
| Meditation Computer Problem Solving (M-CPS) Meditation VR (M-VR) | 15 | 0.49 | 0.06 | 0.31 | 0.75 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Veber, M.; Pesek, I.; Aberšek, B. Implementation of the Modern Immersive Learning Model CPLM. Appl. Sci. 2022, 12, 3090. https://doi.org/10.3390/app12063090
Veber M, Pesek I, Aberšek B. Implementation of the Modern Immersive Learning Model CPLM. Applied Sciences. 2022; 12(6):3090. https://doi.org/10.3390/app12063090
Chicago/Turabian StyleVeber, Matej, Igor Pesek, and Boris Aberšek. 2022. "Implementation of the Modern Immersive Learning Model CPLM" Applied Sciences 12, no. 6: 3090. https://doi.org/10.3390/app12063090
APA StyleVeber, M., Pesek, I., & Aberšek, B. (2022). Implementation of the Modern Immersive Learning Model CPLM. Applied Sciences, 12(6), 3090. https://doi.org/10.3390/app12063090