
Experimental Analysis on the Impact of Current on the Strength and Lifespan of a Ni-Ti Element


 ,
, 
 , and
, and
Abstract
:1. Introduction
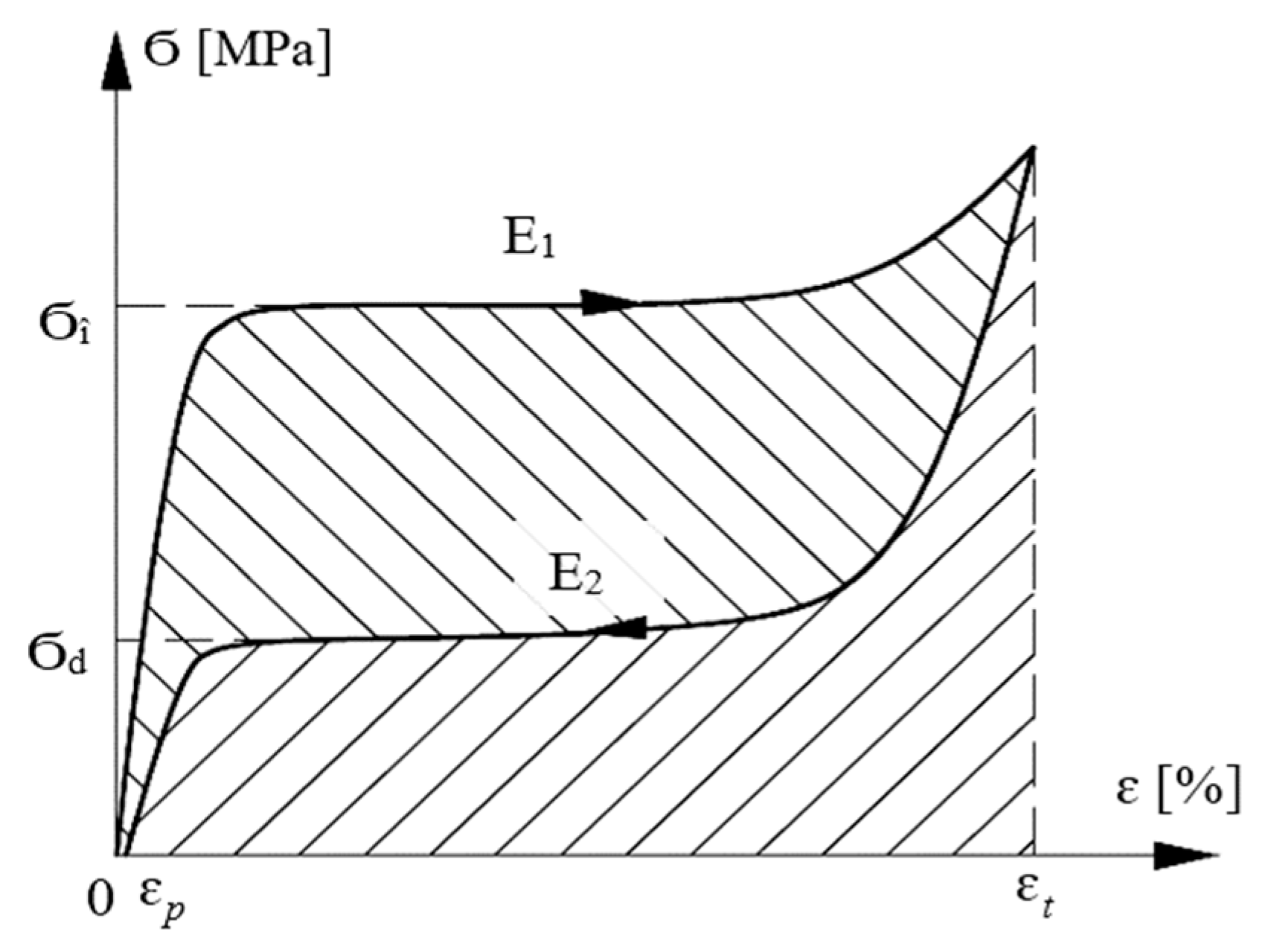
2. Thermomechanical Behavior of the Ni-Ti Material
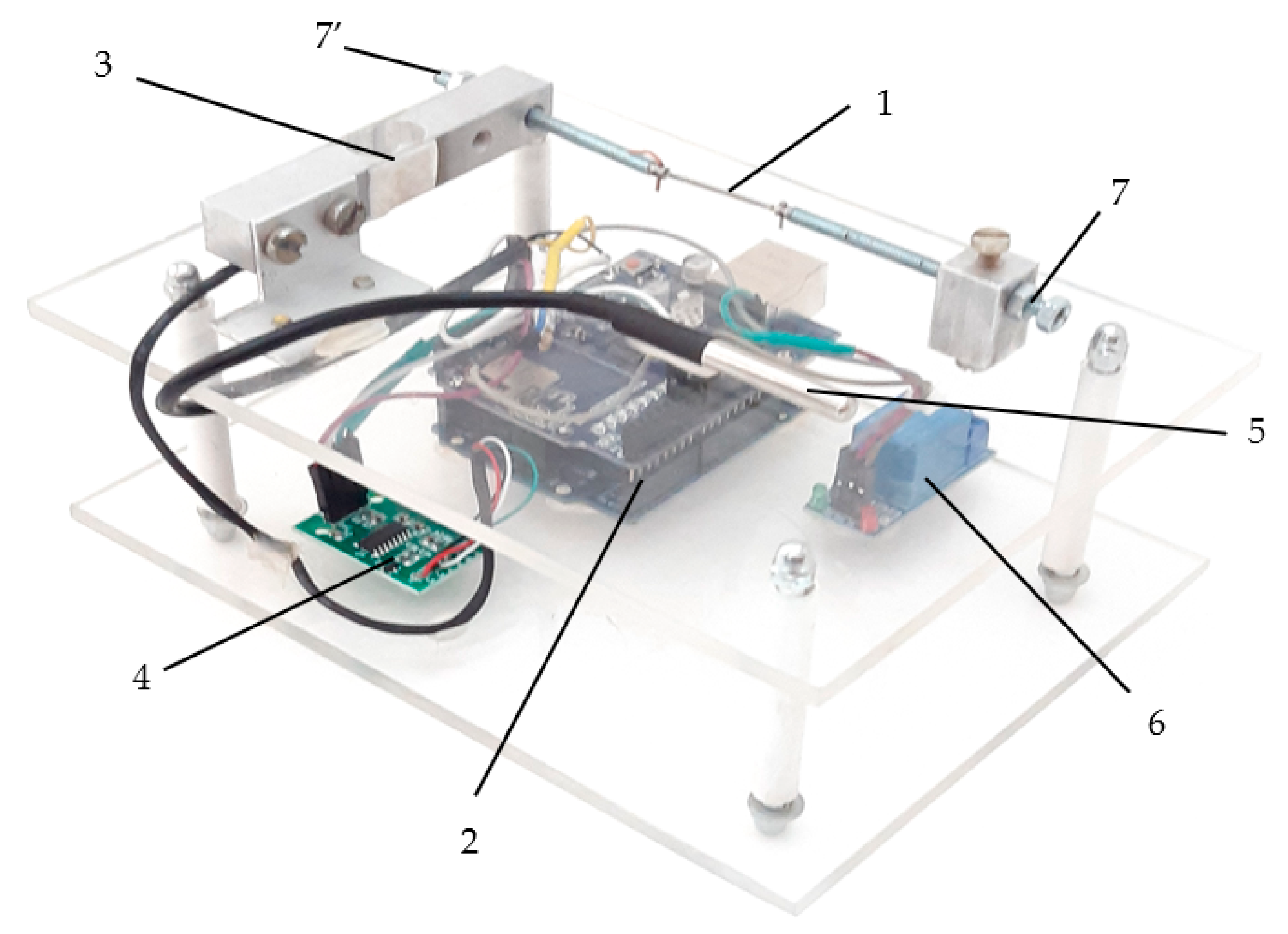
3. Ni-Ti Spring Test Platform
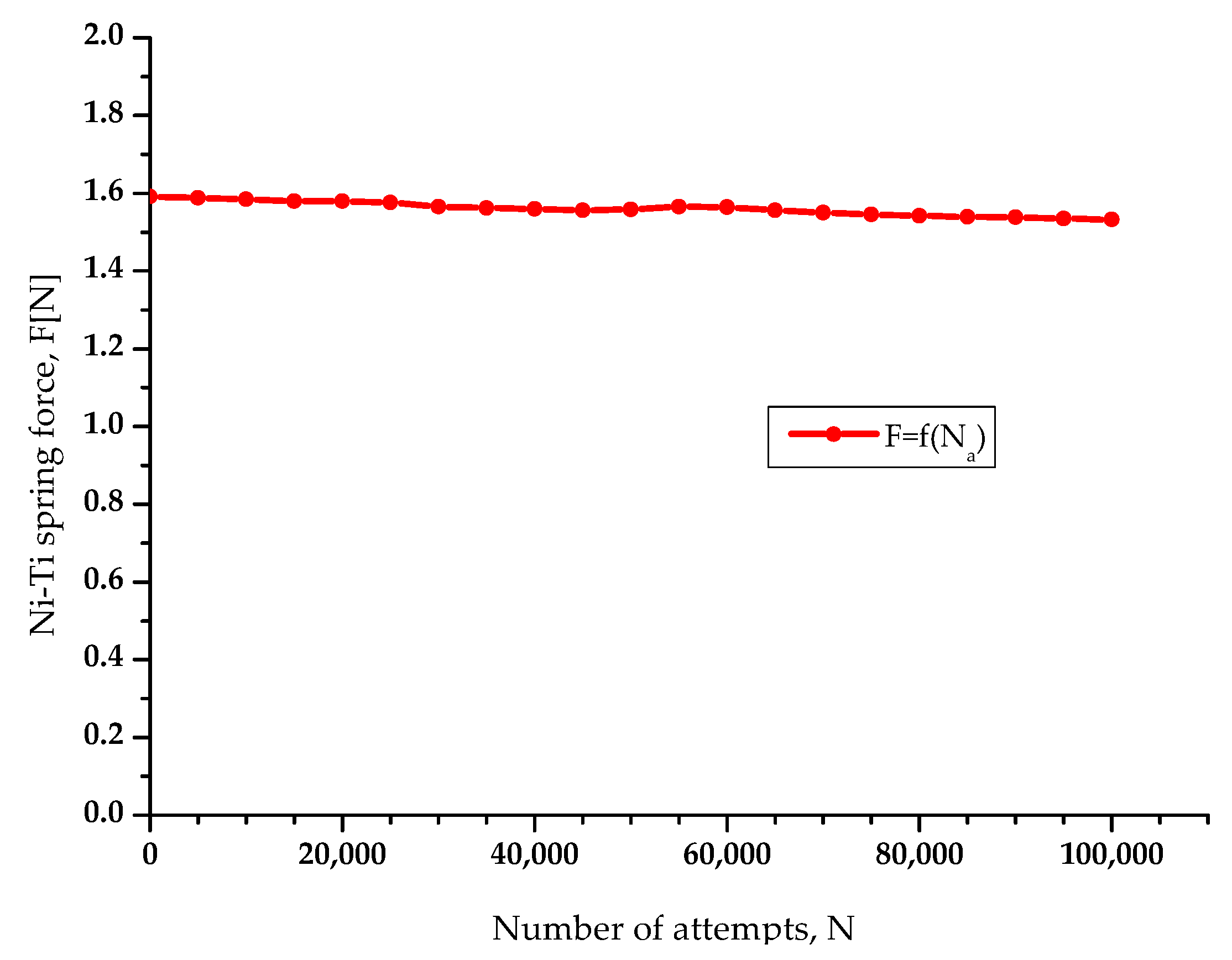
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cernușcă, D.; Poienar, M.; Milici, D.L.; Pața, S.D.; Ungureanu, C.; Pentiuc, R.D.; Popa, C.D. Test Stand. Patent Application No. A/00717, 10 October 2016. [Google Scholar]
- Cernușcă, D.; Milici, D.L.; Poienar, M. Developement of Special Actuators Using Smart Materials. In Proceedings of the 9th International Conference on Electrical and Power Engineering, Iasi, Romania, 20–22 October 2016. [Google Scholar]
- Cernușcă, D.; Milici, L.D.; Poienar, M. Researches on the realization of a electromechanical micropump. In Proceedings of the 2018 International Conference and Exposition on Electrical And Power Engineering (EPE), Iasi, Romania, 18–19 October 2018. [Google Scholar]
- Cernuşcă, D.; Milici, L.D.; Pentiuc, R.D.; Popa, C.; Toader, V.E. Research on the Realization of a Electromechanical Pressure Micropump Used in Electrical Equipment. In Proceedings of the 2019 8th International Conference on Modern Power Systems (MPS), Cluj-Napoca, Romania, 21–23 May 2019. [Google Scholar]
- Valiev, R.Z.; Prokofiev, E.A.; Kazarinov, N.A.; Raab, G.I.; Minasov, T.B.; Strasky, J. Developing Nanostructured Ti Alloys for Innovative Implantable Medical Devices. Materials 2020, 13, 967. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dang, N.M.; Wang, Z.-Y.; Wu, T.-Y.; Nguyen, T.A.K.; Lin, M.-T. Measurement of Effects of Different Substrates on the Mechanical Properties of Submicron Titanium Nickel Shape Memory Alloy Thin Film Using the Bulge Test. Micromachines 2021, 12, 85. [Google Scholar] [CrossRef] [PubMed]
- Rudolf, R.; Stamboli’c, A.; Kocijan, A. Atomic Layer Deposition of aTiO2 Layer on Nitinol and Its Corrosion Resistance in a Simulated Body Fluid. Metals 2021, 11, 659. [Google Scholar] [CrossRef]
- Santiago, J.A. Large Force Shape Memory Alloy Linear Actuator. Ph.D. Dissertation, University of Florida, Gainesville, FL, USA, 2002. [Google Scholar]
- Dezellus, A.; Ochin, P. Shape memory thin round wires produced by the inrotating water melt-spinning technique. Acta Mater. 2006, 54, 1877–1885. [Google Scholar]
- Furuya, Y.; Shimada, H. Shape Memory Actuators for Robotic Applications; Butterworth-Heinemann: London, UK, 1990. [Google Scholar]
- Schiller, E.H. Heat Engine Driven by Shape Memory Alloys: Prototiping and Design. Masters Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 2002. [Google Scholar]
- Cydzik, E. The Design of Electrical Interconnection Systems with Shape Memory Alloys; Raychem Corporation: Menlo Park, CA, USA, 1990. [Google Scholar]
- Lee, J.Y.; Kwak, S.W.; Ha, J.-H.; Kim, H.-C. Ex-Vivo Comparison of Torsional Stress on Nickel–Titanium Instruments Activated by Continuous Rotation or Adaptive Motion. Materials 2020, 13, 1900. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Burtscher, M.; Klein, T.; Lindermann, J.; Lehmann, O.; Fellmann, H.; Guther, V.; Clemens, H.; Mayer, S. An Advanced TiAl Alloy for High-Performance Racing Applications. Materials 2020, 13, 4720. [Google Scholar] [CrossRef] [PubMed]
- Jo, J.H.; Kwak, W.S.; Kim, H.-C.; Kim, S.K.; Ha, J.-H. Torsional Resistance of Heat-Treated Nickel-Titanium Instruments under Different Temperature Conditions. Materials 2021, 14, 5295. [Google Scholar] [CrossRef] [PubMed]
- Duering, T.W.; Melton, K.N.; Stockel, D. Engineering Aspects of Shape Memory Alloys; Butterworth-Helnemann: London, UK, 1990. [Google Scholar]
- Radulescu, M. The Study of Metals; Didactic and Pedagogical Publishing House: Bucharest, Romania, 1982. [Google Scholar]
- Bujoreanu, L.G. Smart Materials; Junimea Publishing House: Iasi, Romania, 2002. [Google Scholar]
- Calugaru, G.; Bujoreanu, L.G.; Stanciu, S.; Hopulele, I.; Căliman, R.; Turcu, O.L.; Apachiţei, I. Shape Memory. Phenomena and Applications in Materials Science; “Plumb” Publishing House: Bacău, Romania, 1995; ISBN 973-9150-50-0. [Google Scholar]
- Burklein, S.; Zupanc, L.; Donnermeyer, D.; Tegtmeyer, K.; Schafer, E. Effect of Core Mass and Alloy on Cyclic Fatigue Resistance of Different Nickel-Titanium Endodontic Instruments in Matching Artificial Canals. Materials 2021, 14, 5734. [Google Scholar] [CrossRef] [PubMed]
- Perkins, J. Shape Memory Effects in Alloys; Plenum Press: New York, NY, USA; London, UK, 1975. [Google Scholar]
- Patoor, E.; Eberhardt, A. Comportament Pseudoelastique et Effet de Memoire de Forme Double Sens. Application ala Torsion du Barreau Cilindirque. Traitement Thermique 1990, 234, 43–48. [Google Scholar]
- Miyazaki, S.; Igo, Y. Effect of thermal cycling on the transformation temperature of NiTi alloys. Acta Metall. 1986, 34, 2045–2051. [Google Scholar] [CrossRef]
- Evanger, J.A. Energy Conversion Apparatus. Int. Cl.5: F03B 9/00. U.S. Patent No. 5,125,233, 30 June 1992. [Google Scholar]
- Melton, K.N.; Mercier, O. Fatigue of NiTi thermoelastic martensites. Acta Metall. 1979, 27, 137–144. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reading Time | Number of Readings of ThingSpeak | Number of Attempts | Operating Time (ms) | Rest Time (ms) | Ambient Temperature (°C) | Force (N) |
|---|---|---|---|---|---|---|
| 16 June 2020 16:35:05 | 1 | 8 | 5000 | 10,000 | 25.88 | 1.60 |
| 16 June 2020 16:58:35 | 62 | 100 | 5000 | 10,000 | 26.13 | 1.54 |
| 16 June 2020 20:45:55 | 662 | 1000 | 5000 | 10,000 | 26.31 | 1.55 |
| 17 June 2020 13:32:11 | 3284 | 5001 | 5000 | 10,000 | 26.13 | 1.58 |
| 18 June 2020 10:26:41 | 6619 | 10,000 | 5000 | 10,000 | 26.19 | 1.58 |
| 19 June 2020 07:22:38 | 9903 | 15,000 | 5000 | 10,000 | 26.31 | 1.58 |
| 20 June 2020 04:22:09 | 13,229 | 20,001 | 5000 | 10,000 | 26.19 | 1.58 |
| 21 June 2020 01:13:35 | 16,494 | 25,000 | 5000 | 10,000 | 25.94 | 1.58 |
| 21 June 2020 22:08:10 | 19,827 | 30,000 | 5000 | 10,000 | 25.81 | 1.58 |
| 22 June 2020 19:24:37 | 23,182 | 35,001 | 5000 | 10,000 | 26.63 | 1.56 |
| 23 June 2020 16:32:46 | 26,587 | 40,001 | 5000 | 10,000 | 27.44 | 1.53 |
| 24 June 2020 12:52:15 | 29,991 | 45,000 | 5000 | 10,000 | 26.5 | 1.56 |
| 25 June 2020 09:37:04 | 33,396 | 50,000 | 5000 | 10,000 | 26.31 | 1.57 |
| 26 June 2020 06:29:10 | 36,801 | 55,000 | 5000 | 10,000 | 26.63 | 1.56 |
| 27 June 2020 03:50:14 | 40,206 | 60,000 | 5000 | 10,000 | 26.94 | 1.57 |
| 28 June 2020 00:41:39 | 43,611 | 65,000 | 5000 | 10,000 | 26.88 | 1.57 |
| 28 June 2020 21:37:50 | 47,016 | 70,000 | 5000 | 10,000 | 27.31 | 1.55 |
| 29 June 2020 19:04:45 | 50,421 | 75,001 | 5000 | 10,000 | 28.06 | 1.53 |
| 30 June 2020 15:33:44 | 53,826 | 80,001 | 5000 | 10,000 | 27.81 | 1.53 |
| 1 July 2020 12:30:43 | 57,231 | 85,001 | 5000 | 10,000 | 27.38 | 1.55 |
| 2 July 2020 08:55:03 | 60,635 | 90,000 | 5000 | 10,000 | 27.38 | 1.55 |
| 3 July 2020 04:58:03 | 64,040 | 95,000 | 5000 | 10,000 | 28.25 | 1.54 |
| 4 July 2020 01:43:16 | 67,445 | 100,000 | 5000 | 10,000 | 28.56 | 1.52 |
| 4 July 2020 07:56:24 | 68,461 | 101,492 | 5000 | 10,000 | 28.31 | 1.53 |
| Reading Time | Number of Readings of ThingSpeak | Number of Attempts | Operating Time (ms) | Rest Time (ms) | Ambient Temperature (°C) | Force (N) |
|---|---|---|---|---|---|---|
| 6 August 2020 16:50:42 | 30 | 5 | 5000 | 10,000 | 26.81 | 4.30 |
| 6 August 2020 17:14:28 | 103 | 100 | 5000 | 10,000 | 27.06 | 4.15 |
| 6 August 2020 21:00:02 | 804 | 1000 | 5000 | 10,000 | 27.06 | 3.66 |
| 7 August 2020 01:10:22 | 1585 | 2000 | 5000 | 10,000 | 26.88 | 3.79 |
| 7 August 2020 09:31:17 | 3157 | 4000 | 5000 | 10,000 | 26.63 | 3.83 |
| 7 August 2020 17:54:35 | 4678 | 6000 | 5000 | 10,000 | 27.19 | 3.31 |
| 8 August 2020 02:15:01 | 6251 | 8000 | 5000 | 10,000 | 27.06 | 3.32 |
| 8 August 2020 10:35:56 | 7843 | 10,001 | 5000 | 10,000 | 26.69 | 3.30 |
| 8 August 2020 18:56:53 | 9405 | 12,000 | 5000 | 10,000 | 27.5 | 2.98 |
| 9 August 2020 03:17:49 | 11,003 | 14,000 | 5000 | 10,000 | 27.06 | 2.84 |
| 9 August 2020 11:38:30 | 12,628 | 16,000 | 5000 | 10,000 | 26.75 | 2.91 |
| 9 August 2020 19:58:41 | 14,207 | 18,000 | 5000 | 10,000 | 27.19 | 2.83 |
| 10 August 2020 04:19:36 | 15,787 | 20,000 | 5000 | 10,000 | 27.13 | 2.79 |
| 10 August 2020 12:42:16 | 17,344 | 22,001 | 5000 | 10,000 | 27.19 | 2.62 |
| 10 August 2020 22:30:03 | 18,149 | 23,909 | 5000 | 10,000 | 27.13 | 0.02 |
| 11 August 2020 09:25:54 | 18,161 | 25,643 | 5000 | 10,000 | 26.81 | 0.01 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dumitru, C.; Milici, L.D.; Pentiuc, R.D.; Atănăsoae, P.; Ungureanu, C.; Hopulele, E. Experimental Analysis on the Impact of Current on the Strength and Lifespan of a Ni-Ti Element. Appl. Sci. 2022, 12, 3185. https://doi.org/10.3390/app12063185
Dumitru C, Milici LD, Pentiuc RD, Atănăsoae P, Ungureanu C, Hopulele E. Experimental Analysis on the Impact of Current on the Strength and Lifespan of a Ni-Ti Element. Applied Sciences. 2022; 12(6):3185. https://doi.org/10.3390/app12063185
Chicago/Turabian StyleDumitru, Cernusca, Laurențiu Dan Milici, Radu Dumitru Pentiuc, Pavel Atănăsoae, Constantin Ungureanu, and Eugen Hopulele. 2022. "Experimental Analysis on the Impact of Current on the Strength and Lifespan of a Ni-Ti Element" Applied Sciences 12, no. 6: 3185. https://doi.org/10.3390/app12063185
APA StyleDumitru, C., Milici, L. D., Pentiuc, R. D., Atănăsoae, P., Ungureanu, C., & Hopulele, E. (2022). Experimental Analysis on the Impact of Current on the Strength and Lifespan of a Ni-Ti Element. Applied Sciences, 12(6), 3185. https://doi.org/10.3390/app12063185