
Improved FULMS Algorithm for Multi-Modal Active Control of Compressor Vibration and Noise Reduction


Abstract
:1. Introduction
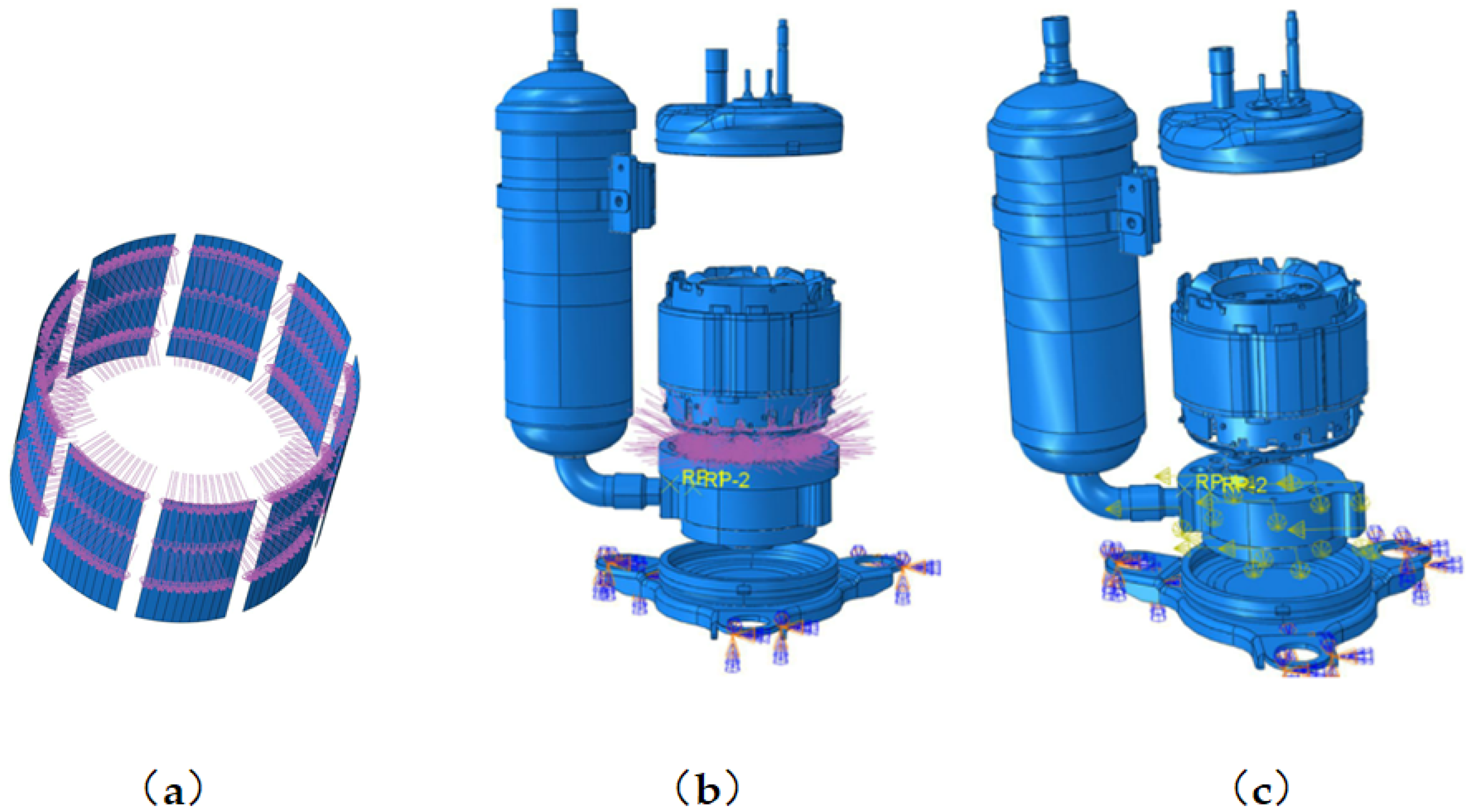
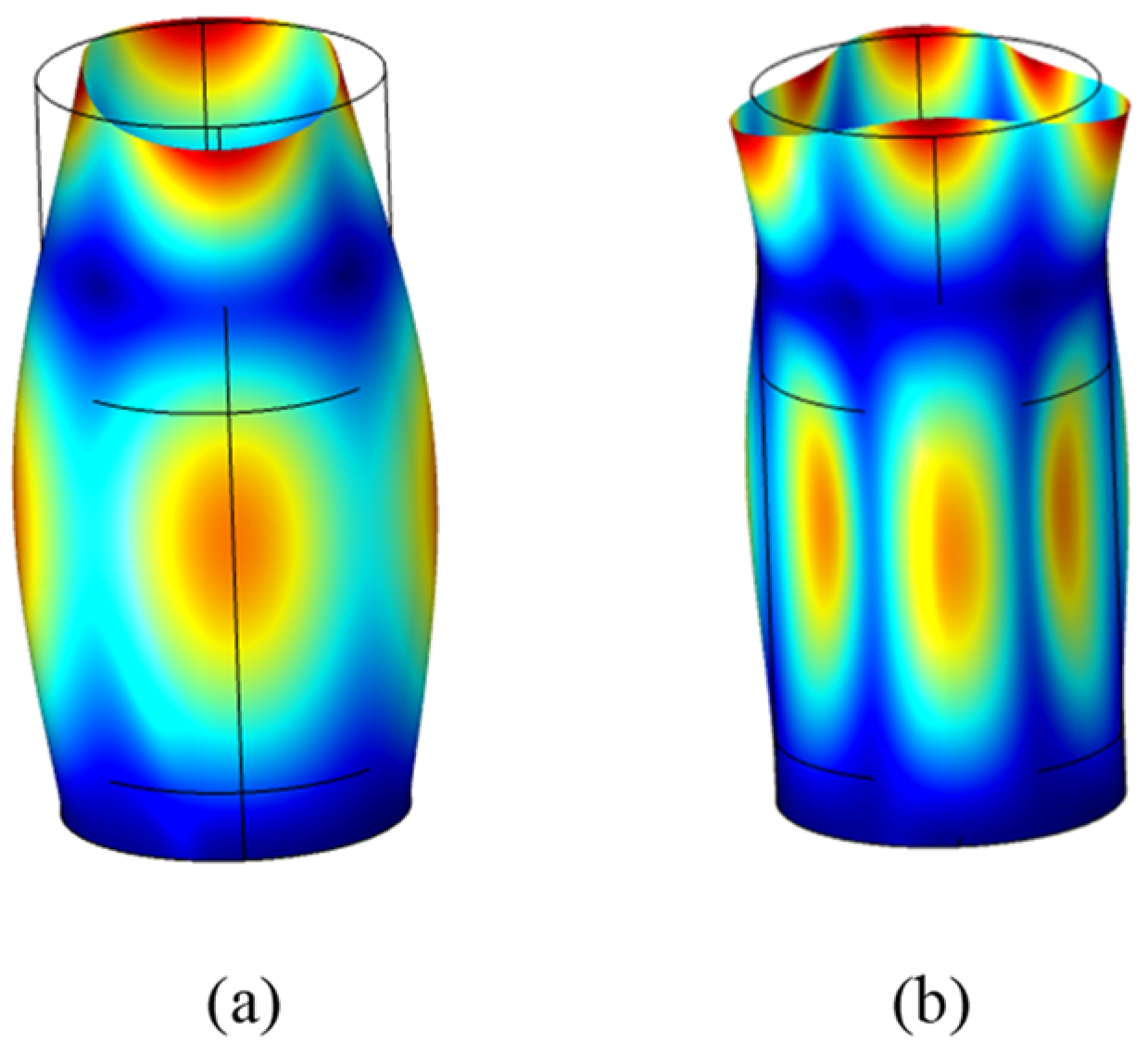
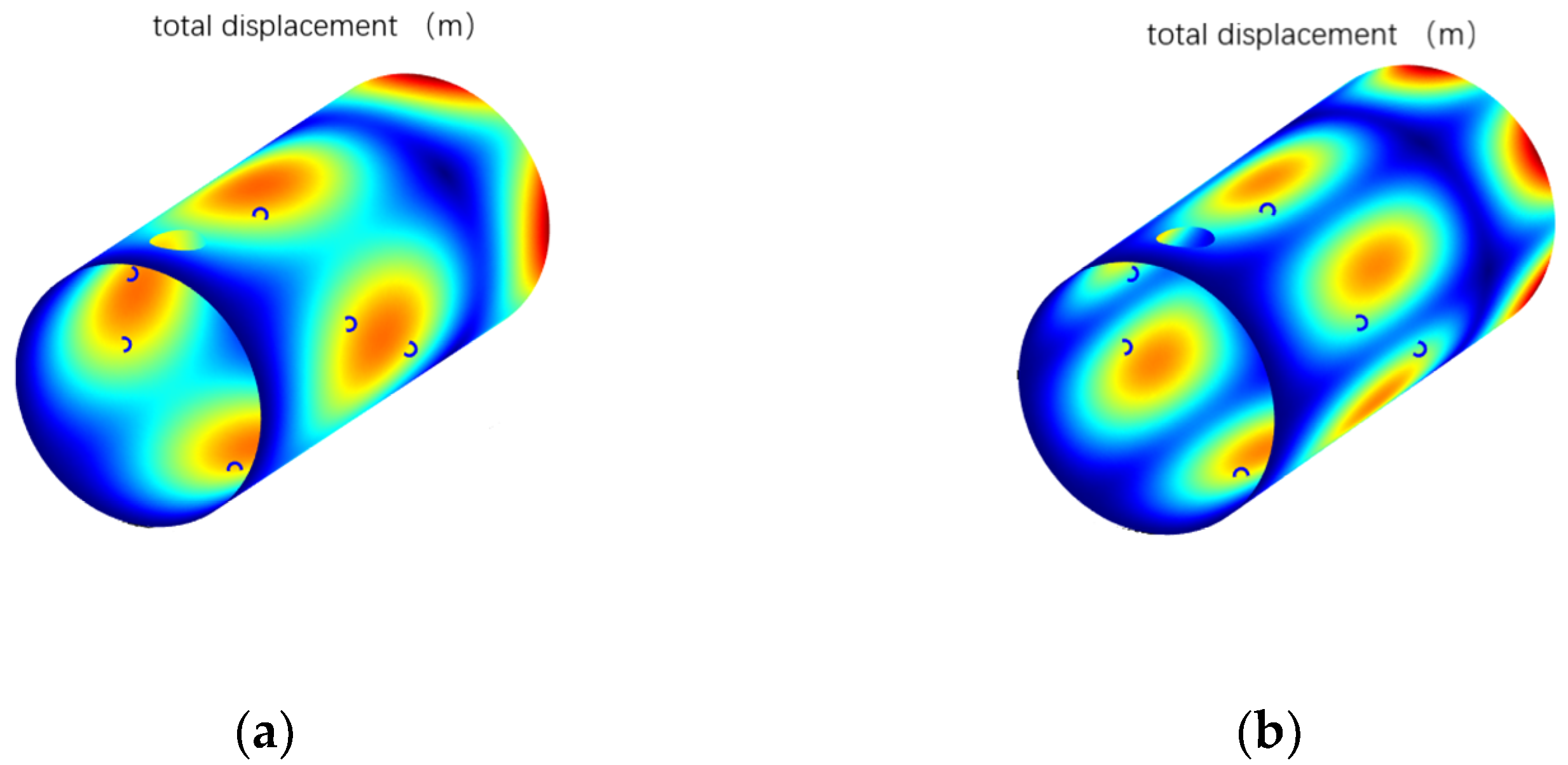
2. Modal Analysis of Vibration and Sound Radiation
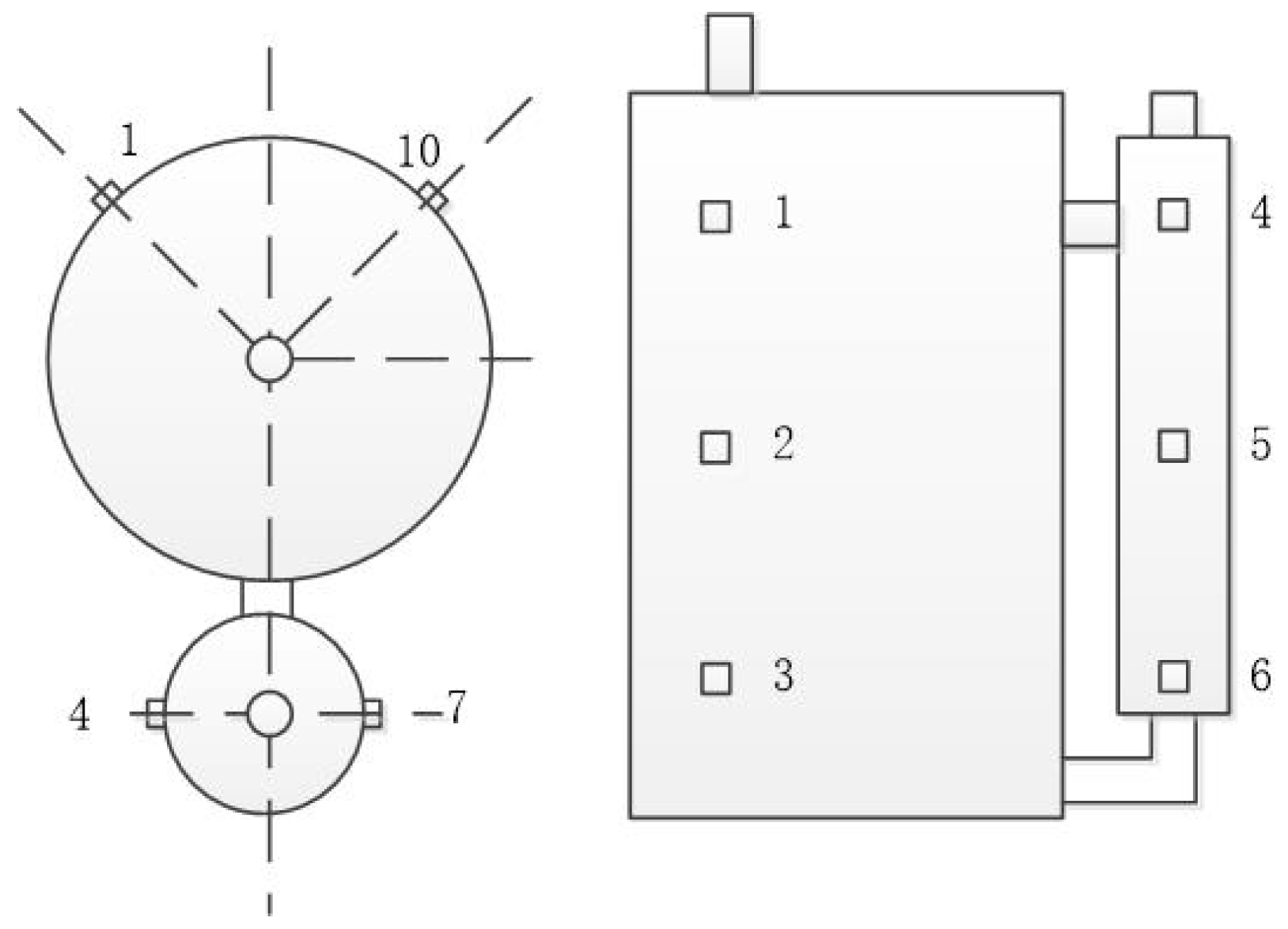
3. Test and Analysis of Compressor Excitation Signal
3.1. Full Band Noise Analysis
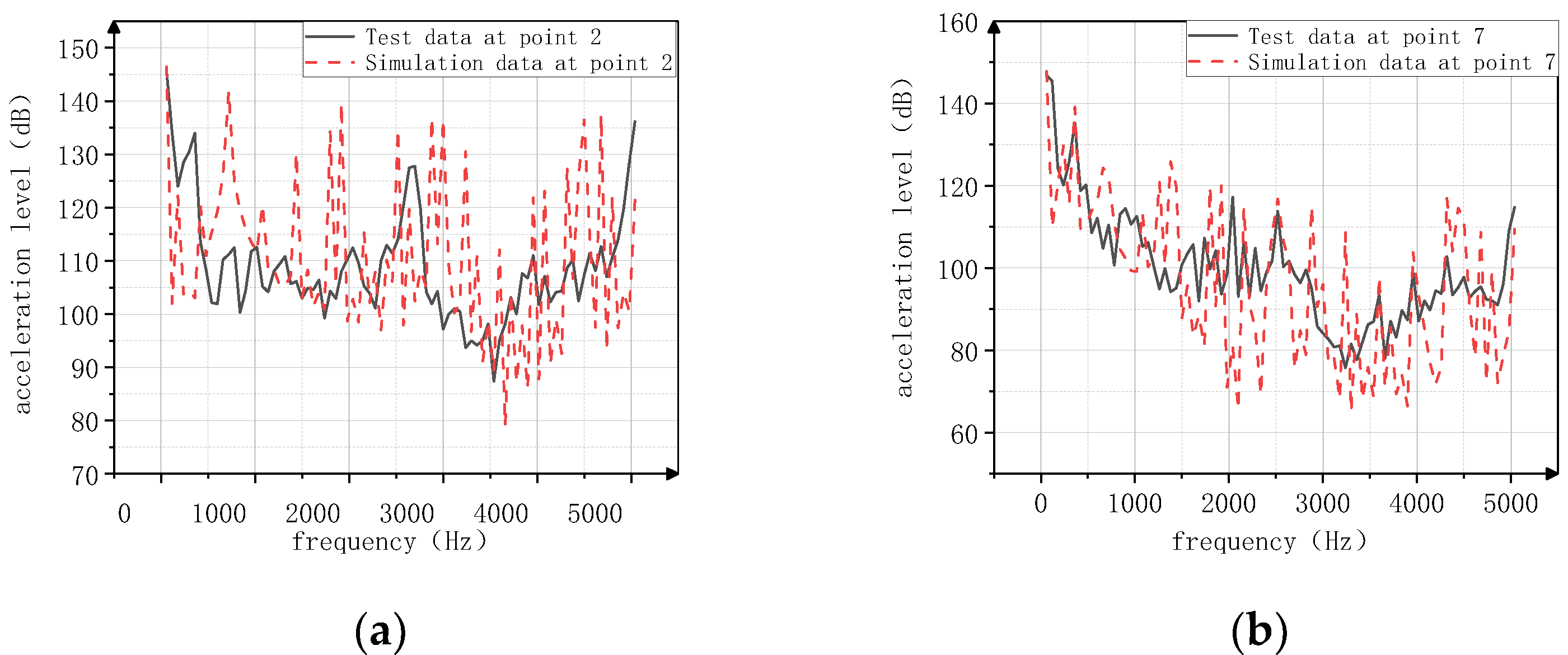
3.2. Simulation Analysis of Excitation Signal
4. Improved FULMS Algorithm Active Control
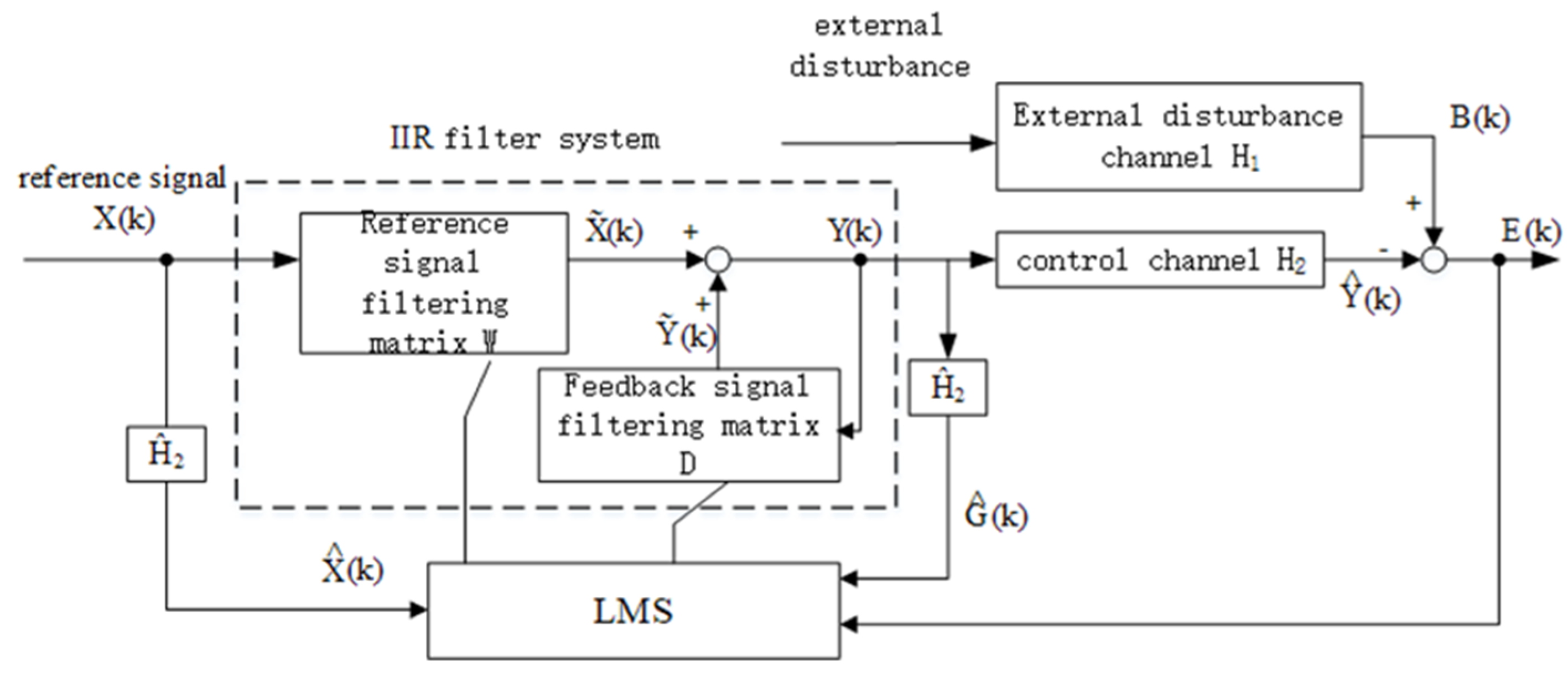
4.1. Improved FULMS Algorithm Based on Nadam
- (1)
- Term B(k) is the n-dimensional response vector generated by the external disturbance signal through the external disturbance channel;
- (2)
- After the reference signal X(k) with a high degree of correlation with the external disturbance signal is adaptively filtered by the IIR filtering system, an n-dimensional control vector is generated, corresponding to the signal input of n actuators respectively, and then the control signal is generated through the control channel Ŷ(k);
- (3)
- Term E(k) is the difference between the two signals; when the system has not controlled, there is E(k) = B(k);
- (4)
- Terms H1 and H2 are the transfer functions of the primary channel and the secondary channel, respectively. Term 2 is the modeling matrix of the secondary channel. In an ideal case, 2 = H2, and they are all n × n-dimensional arrays. Each array has n-dimensional vectors, corresponding to the filter length of each filter.
- (5)
- Terms (k) and (k)are, respectively, X(k) and Y(k) obtained after the secondary channel simulation, which are the control signals updated by the algorithm.
4.2. Secondary Source Configurations
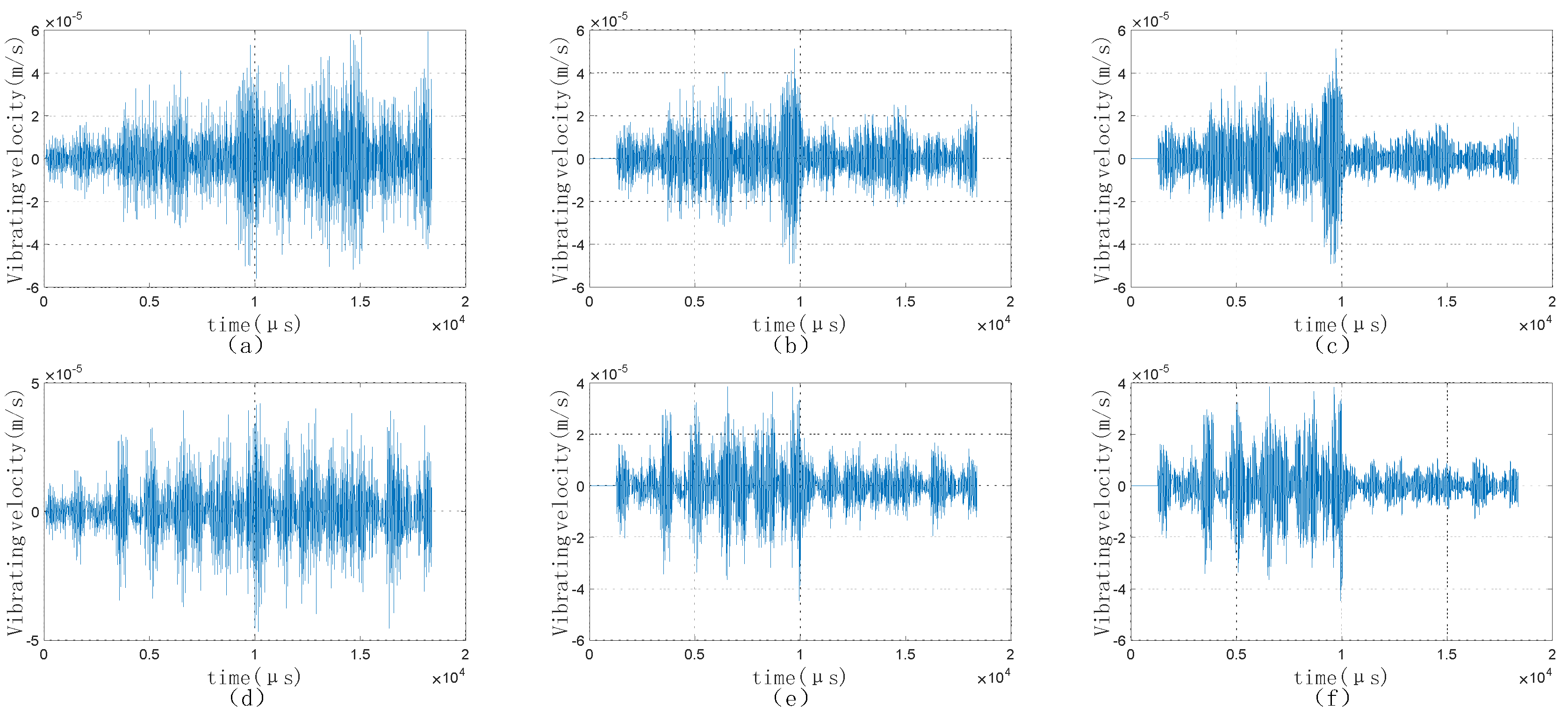
4.3. Joint Simulation Analyses
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| FULMS | The Filtered-U least mean square |
| NADAM | The Nesterov accelerated adaptive moment estimation |
| LMS | The Least Mean Squares |
| NLMS | The Normalized Least Mean Squares |
| FXLMS | The Filtered-X Least Mean Squares |
| Adam | adaptive moment estimation |
| HMVSS | Harmonic Mean dependent Variable Step-Size |
| CM | Classical Momentum |
| NAG | Nesterov’s accelerated gradient |
| FUNLMS | The Filtered-U Normalized Least Mean Squares |
| [m] | the mass matrix |
| [k] | the stiffness matrix |
| {Q(t)} | the excitation matrix |
| {x(t)} | the displacement matrix |
| ω | the excitation frequency |
| ωr | the r-th natural frequency |
| {ur} | the r-th modal vector |
| N0r | the generalized force vector |
| W | acoustical power |
| Q | the characteristic matrix |
| Λ | the diagonal matrix |
| ν | the normal velocity vector |
| λ | the eigenvalue |
| S | area |
| ρ | density |
| c | velocity of sound |
| σ | the radiation ratio |
| R | the acoustic radiation resistance matrix |
| A | the velocity amplitude |
| Φ | vibration mode |
| q | the acoustic radiation mode |
| Lp | sound pressure level |
| p | sound pressure |
| pe | the effective sound pressure |
| ε | energy density of sound |
References
- Ooi, K.; Wong, T. A computer simulation of a rotary compressor for household refrigerators. Appl. Therm. Eng. 1997, 17, 65–78. [Google Scholar] [CrossRef]
- Ooi, K. Design optimization of a rolling piston compressor for refrigerators. Appl. Therm. Eng. 2005, 25, 813–829. [Google Scholar] [CrossRef]
- Ferraris, G.; Andrianoely, M.A.; Berlioz, A.; Dufour, R. Influence of cylinder pressure on the balancing of a rotary compressor. J. Sound Vib. 2006, 292, 899–910. [Google Scholar] [CrossRef]
- Kim, H.J. Transmission Loss and Back Pressure Characteristics for Compressor Mufflers. In Proceedings of the 1992 International Compressor Engineering Conference at Purdue, Purdue University, West Lafayette, IN, USA, 14–17 July 1992; pp. 1455–1462. [Google Scholar]
- Dreiman, N.; Herrick, K. Vibration and control of a rotary compressor. In Proceedings of the 1998 International Compressor Engineering Conference at Purdue University, West Lafayette, IN, USA, 14–17 July 1998; pp. 685–690. [Google Scholar]
- Widrow, B. A Review of Adaptive Antennas. In Proceedings of the IEEE International Conference on Acoustics, Washington, DC, USA, 2–4 April 1979; pp. 273–278. [Google Scholar]
- Morgan, D. An analysis of multiple correlation cancellation loops with a filter in the auxiliary path. IEEE Trans. Acoust. Speech Signal Process. 1980, 28, 454–467. [Google Scholar] [CrossRef]
- Burgess, J.C. Active adaptive sound control in a duct: A computer simulation. J. Acoust. Soc. Am. 1981, 70, 715–726. [Google Scholar] [CrossRef]
- Saito, N.; Sone, T. Influence of modeling error on noise reduction performance of active noise control systems using filtered-X LMS algorithm. J. Acoust. Soc. Jpn. (E) 1996, 17, 195–202. [Google Scholar] [CrossRef] [Green Version]
- Douglas, S. Fast implementations of the filtered-X LMS and LMS algorithms for multichannel active noise control. IEEE Trans. Speech Audio Process. 1999, 7, 454–465. [Google Scholar] [CrossRef] [Green Version]
- Das, D.; Kuo, S.; Panda, G. New block filtered-X LMS algorithms for active noise control systems. IET Signal Process. 2007, 1, 73–81. [Google Scholar] [CrossRef]
- Eriksson, L.J. The development of the filtered-U algorithm for active noise control. J. Acoust. Soc. Am. 1991, 89, 257–262. [Google Scholar] [CrossRef]
- Kim, I.; Na, H. Constraint filtered-x and filtered-u least-mean-square algorithms for the active control of noise in ducts. J. Acoust. Soc. Am. 1994, 95, 3379–3389. [Google Scholar] [CrossRef]
- Suman, T.; Venkatanarayana, M. Active Noise Control for PVC Duct Using Robust Feedback Neutralization F×LMS Approach. J. Control. Autom. Electr. Syst. 2021, 32, 1189–1203. [Google Scholar] [CrossRef]
- Ospel, M.W.; Werner, P.; Wurm, F.H.; Witte, M. Simulation of active noise control using transform domain adaptive filter algorithms linked with the inhomogeneous Helmholtz equation. Appl. Acoust. 2021, 182, 108250. [Google Scholar] [CrossRef]
- Ramos, L.P.; Martín, F.R.; Arranz, M.F.; Palacios, -N.G. An Alternative Approach to Obtain a New Gain in Step-Size of LMS Filters Dealing with Periodic Signals. Appl. Sci. 2021, 11, 5618. [Google Scholar] [CrossRef]
- Gaiotto, S.; Laudani, A.; Lozito, G.M.; Riganti, F.F. A Computationally Efficient Algorithm for Feedforward Active Noise Control Systems. Electronics 2020, 9, 1504. [Google Scholar] [CrossRef]
- Mondal, K.; Das, S.; Hamada, N.; Abu, A.B.; Das, S.; Faris, W.F.; Toh, H.T. Ahmad, A. An improved narrowband active noise control system without secondary path modelling based on the time domain. Int, J. Veh, Noise Vib. 2019, 15, 110–132. [Google Scholar] [CrossRef]
- Elliott, S.J.; Johnson, M.E. Radiation modes and the active control of sound power. J. Acoust. Soc. Am. 1993, 94, 2194–2204. [Google Scholar] [CrossRef]
- Currey, M.N.; Cunefare, K.A. The radiation modes of baffled finite plates. J. Acoust. Soc. Am. 1994, 98, 1570–1580. [Google Scholar] [CrossRef]
- Blake, W.K. Mechanics of Flow-Induced Sound and Vibration; Inc. (London) Ltd.: London, UK; Academic Press: Cambridge, MA, USA, 1986. [Google Scholar]
- Xie, L.; Qiu, Z.-C.; Zhang, X.-M. Vibration control of a flexible clamped-clamped plate based on an improved FULMS algorithm and laser displacement measurement. Mech. Syst. Signal Process. 2016, 75, 209–227. [Google Scholar] [CrossRef]
- Huang, Q.; Luo, J.; Li, H.; Wang, X. Analysis and implementation of a structural vibration control algorithm based on an IIR adaptive filter. Smart Mater. Struct. 2013, 22, 85008. [Google Scholar] [CrossRef]
- Polyak, B. Some methods of speeding up the convergence of iteration methods. USSR Comput. Math. Math. Phys. 1964, 4, 1–17. [Google Scholar] [CrossRef]
- Duchi, J.; Hazan, E.; Singer, Y. Adaptive Subgradient Methods for Online Learning and Stochastic Optimization. In Proceedings of the COLT 2010—The 23rd Conference on Learning Theory, Haifa, Israel, 27–29 June 2010. [Google Scholar]
- Kingma, D.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2004, arXiv:1412.6980. Available online: https://arxiv.org/pdf/1412.6980.pdf (accessed on 16 February 2022).
- Nesterov, Y.E. A method of solving a convex programming problem with convergence rate O (1/k2). Soviet Math. Doklady. 1983, 27, 372–376. [Google Scholar]
- Dozat, T. Incorporating Nesterov Momentum into Adam. Workshop Track—ICLR 2016. Available online: https://openreview.net/forum?id=OM0jvwB8jIp57ZJjtNEZ (accessed on 16 February 2022).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic Frequency | Corresponding Energy | Energy Proportion |
|---|---|---|
| 3672 | 1.71 × 10−6 | 77.1171% |
| 3469 | 5.06 × 10−7 | 22.8296% |
| 1231 | 8.48 × 10−10 | 0.0383% |
| 2884 | 1.58 × 10−10 | 0.0071% |
| 3660 | 1.03 × 10−10 | 0.0046% |
| 2885 | 5.98 × 10−11 | 0.0027% |
| 1741 | 5.66 × 10−12 | 0.0003% |
| 3376 | 2.86 × 10−12 | 0.0001% |
| 3966 | 2.30 × 10−12 | 0.0001% |
| 1242 | 9.76 × 10−13 | 0.0000% |
| 1760 | 1.77 × 10−13 | 0.0000% |
| Point Serial Number | X (m) | Y (m) | Z (m) |
|---|---|---|---|
| 1 | 0.0453 | 0.0650 | 0.0121 |
| 2 | 0.0118 | 0.0648 | 0.0453 |
| 3 | −0.0461 | 0.0809 | 0.0086 |
| 4 | −0.0447 | 0.0735 | −0.0142 |
| 5 | 0.0036 | 0.0621 | −0.0467 |
| 6 | 0.0455 | 0.1075 | −0.0111 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, X.; Li, C.; Huang, Y.; Yang, M.; Huang, Q. Improved FULMS Algorithm for Multi-Modal Active Control of Compressor Vibration and Noise Reduction. Appl. Sci. 2022, 12, 3941. https://doi.org/10.3390/app12083941
Wu X, Li C, Huang Y, Yang M, Huang Q. Improved FULMS Algorithm for Multi-Modal Active Control of Compressor Vibration and Noise Reduction. Applied Sciences. 2022; 12(8):3941. https://doi.org/10.3390/app12083941
Chicago/Turabian StyleWu, Xiaowen, Chaopeng Li, Yizhe Huang, Mingquan Yang, and Qibai Huang. 2022. "Improved FULMS Algorithm for Multi-Modal Active Control of Compressor Vibration and Noise Reduction" Applied Sciences 12, no. 8: 3941. https://doi.org/10.3390/app12083941
APA StyleWu, X., Li, C., Huang, Y., Yang, M., & Huang, Q. (2022). Improved FULMS Algorithm for Multi-Modal Active Control of Compressor Vibration and Noise Reduction. Applied Sciences, 12(8), 3941. https://doi.org/10.3390/app12083941