This section describes the analysis of the measurement series. First, the segmentation of the data sets is presented in order to create comparable signals. Subsequently, the segmented signals in the time domain are compared with regard to the recognisability of the damage. Finally, the signals are examined in the frequency domain.
3.1. Data Segmentation
In the following, the vibration signal of one gear revolution at a rotational speed approximately of 200 rpm is considered as an example for each gear. For this purpose, the recorded vibration signal is transformed into the time–frequency domain as a spectrogram. Spectrograms of vibration signals are determined in digital signal processing via the discrete short-time Fourier transform (STFT). The discrete STFT
[
19] is given by
Here,
describes a discrete-time signal and
a time- and frequency-shifted window function in the considered interval
. Since only discrete frequencies and time points are considered,
applies.
describes the considered window size. The complex-valued short-time Fourier transform is converted into real numbers via the magnitude square for the pictorial representation in a spectrogram
:
The spectrogram in decibels
results in
. First, in
Figure 6, the vibration signal is considered above and the corresponding spectrogram for the measurement of the gearbox with synthetic damage to gear
is considered below.
The vibration signal shown was sampled at 51.2 kHz. A resampling to 44 kHz was applied. For the calculation of the following spectrograms, an FFT length of 512 values, a Blackman window function with a length of 512 values and an overlap of 511 values were chosen. Due to the short FFT length and the large overlap, a good temporal resolution can be achieved, which is necessary for the assignment of the individual teeth. Furthermore, the black lines show the parts of the signal in which the tooth meshes of the synthetically damaged teeth occur. These time windows are labelled according to the damaged teeth
,
,
,
from
Section 2.3. The highlighted signal parts were determined based on the spectrogram, the rotational speed and the known geometry of the synthetic damage. The highlighted areas correspond to the proportionate duration of the respective teeth meshes. The largest damage (
) was determined in the spectrogram via its period duration and subsequently the positions of
,
,
were calculated. The procedure for selecting the time windows will be discussed in more detail later in this section.
The signal in the time domain shows the vibrations over a time interval of about 200 ms. The vibration signal is composed of many individual transients, which are caused by the metallic contacts of the tooth meshes and roller bearings. In , a more distinctive transient can be seen compared to the rest of the signal. In terms of amplitude, however, this can hardly be distinguished from the other transients. For , and , no differences to the undamaged tooth meshes can be seen in the time domain. In the spectrogram of the vibration signal, the tooth mesh of the synthetic damaged tooth in can be clearly recognised by the more distinctive frequency components in a range from 1 kHz to 7 kHz. This transient can be clearly separated from the entire signal shown. shows smaller distinct frequency ranges which cannot be clearly assigned to the damage due to its comparable occurrence in the intact tooth meshes. For and , no noticeable distinctive frequencies occur.
An analogous consideration for the gearbox with artificially damaged gear
is shown in
Figure 7.
Here again, one gear revolution is considered. Compared to the previous observation, this results in a length of about 900 ms due to the gear ratio . In this observation, no concrete deviation from the rest of the signal can be recognised in the time domain even in the time window of the greatest damage. Only when looking at the time–frequency domain in the bottom illustration, can the differences be recognised. Above all, is characterised by strongly distinctive frequencies in the range of about 1 kHz. This distinctive frequency range also occurs for . and show no differences to the intact tooth meshes.
For a statistical evaluation of the tooth meshing of the synthetically damaged teeth, the individual measurements are first segmented. Based on the previous observation, it could be shown that for the two examined gears, the most severe damage
is recognisable in each case by a more distinctive frequency behaviour in the spectrogram. In order to first determine the times of these damaged tooth meshes, the mean signal power of the spectrogram
in the dominant frequency ranges
, which were previously derived, is calculated according to
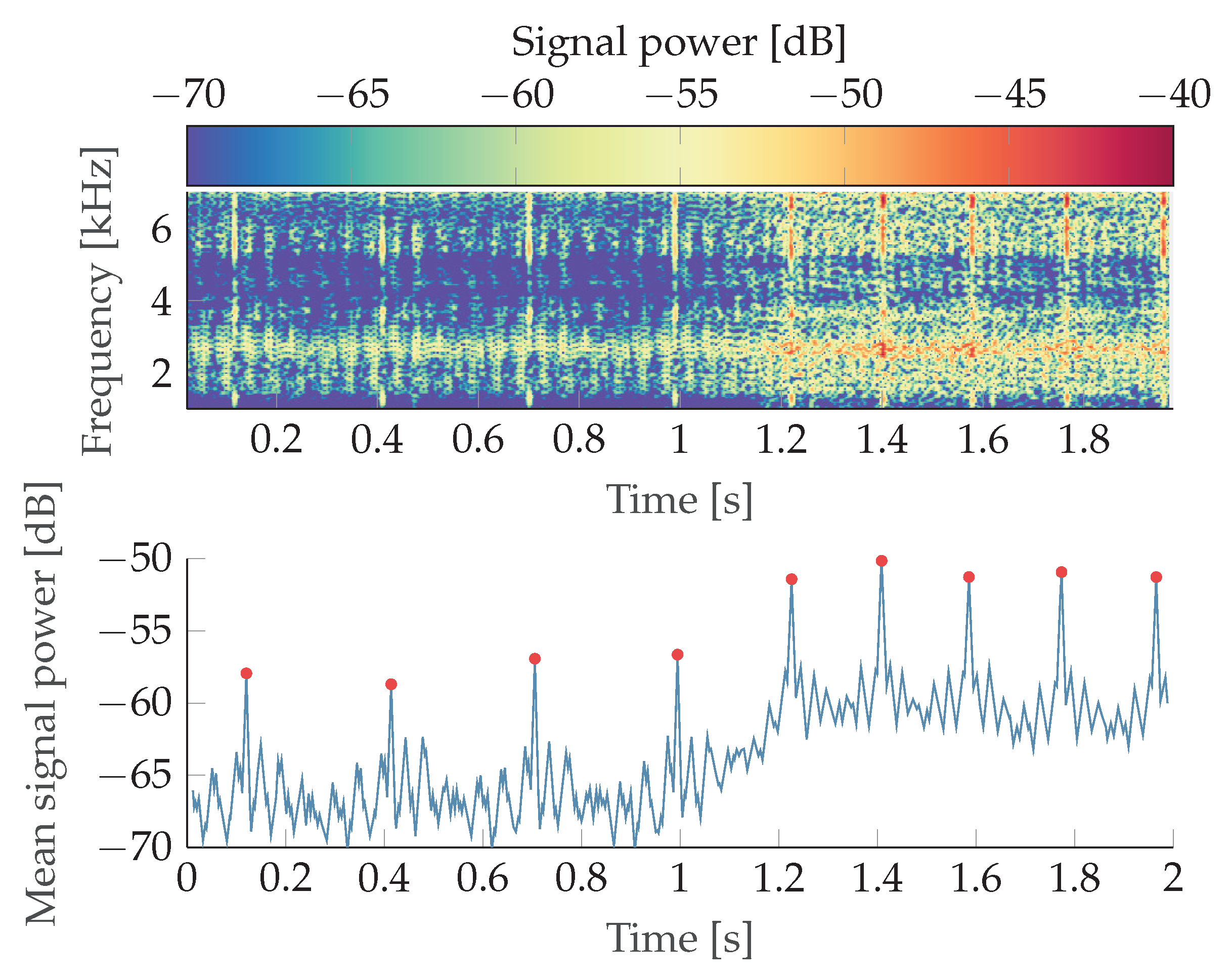
As an example for the segmentation of the tooth meshes of the damage
, a spectrogram as well as the mean signal power
in the range of 1 kHz to 7 kHz is shown in
Figure 8. The peaks in the bottom plot correspond to the damaged tooth meshes. In addition, it can be seen that there are no anomalies in the signals in the areas after the damage, and thus the intact meshes are not influenced by the damaged ones before them. The vibration signal used for this spectrogram was recorded at the gearbox with damage to gear
. The measured speed is initially constant at 207 rpm and increases to 322 rpm after about one second.
In the spectrogram, recurring significant distinct frequencies can be recognised. Furthermore, an increase in the total signal power can be seen from about one second onwards, due to the increase in rotational speed at this point. The average calculated signal power in the range of 1–7 kHz also shows the signal peaks. The total average power increase due to the increased speed can also be seen in this diagram. Furthermore, it can be seen that the period duration decreases due to the increasing speed. The average period
between the determined signal peaks in the range of the measured speed of
is
. The theoretical period duration
for the occurrence of the damage at
is given by
and thus coincides within the scope of the measurement accuracy with the period durations determined via the average signal power. The mean period between the signal peaks in the speed range of 322 rpm is
. This again coincides with the theoretical period duration of
for this speed. As a result, the signal peaks can be assigned to the damage
. The signal peaks are defined as the times
of the tooth meshes
. Based on the geometry and the known number of teeth being 14, the times
,
and
of the damaged tooth meshes
,
and
are given by
In addition, the time
of intact tooth meshes was determined as a reference for the following consideration according to
The length of the respective signals is
, as this corresponds to the part of the respective tooth during one gear revolution. The signals of the tooth meshes are segmented based on these times and the interval length
. An analogous consideration for determining the signals was carried out for the measurement series of the gearbox with damage to gear
. The total number of signals
recorded for each of the four damages on gear
and the number
for damages on gear
for the respective rotational speeds can be taken from
Table 3.
For each rotational speed, a statistically representative set of signals was thus determined for each damage level.
3.2. Recognisability of Gear Damage in the Time Domain
In order to examine the experimentally possible recognisability of the synthetic damages, the segmented signals are examined more closely in the time domain. For this purpose, the cross-correlation between the individual signals determined beforehand is calculated in order to use the correlation coefficients to make statements about the damage levels and the recognisability of damage. The cross-correlation function (CCF) is a modification of an autocorrelation function (ACF). A discrete autocorrelation
describes the correlation of a signal
with itself at another time
over a considered interval
and is described by
The autocorrelation function thus describes the similarity of a signal part to previous times in the signal [
20]. The cross correlation is an extension of the ACF in which a signal
is compared with a second different signal
[
20]. For the discrete case, the cross correlation
between two signals is calculated according to
The cross correlation describes the similarity of two signals
and
. The cross correlation is normalised over the values of the ACF without shift
and
of both signals to
This results in values in the range
for the normalised CCF, which are thus comparable to the values of the correlation coefficients of the Pearson correlation [
21]. Since it cannot be assumed that all signals recorded are ideally aligned, the maximum value of the CCF is calculated. Signals can be aligned via the associated temporal offset of the maximum value [
22]. The maximum value of the cross correlation function
thus describes the similarity of two signals aligned to each other and results in
In the following, a correlation matrix of the recorded vibration signals of the gearbox with damage to gear
at a rotational speed of 200 rpm is first considered as an example. For this purpose, 34 signals are considered for each damage level
,
,
and
, as well as for the reference tooth mesh of the intact teeth
.
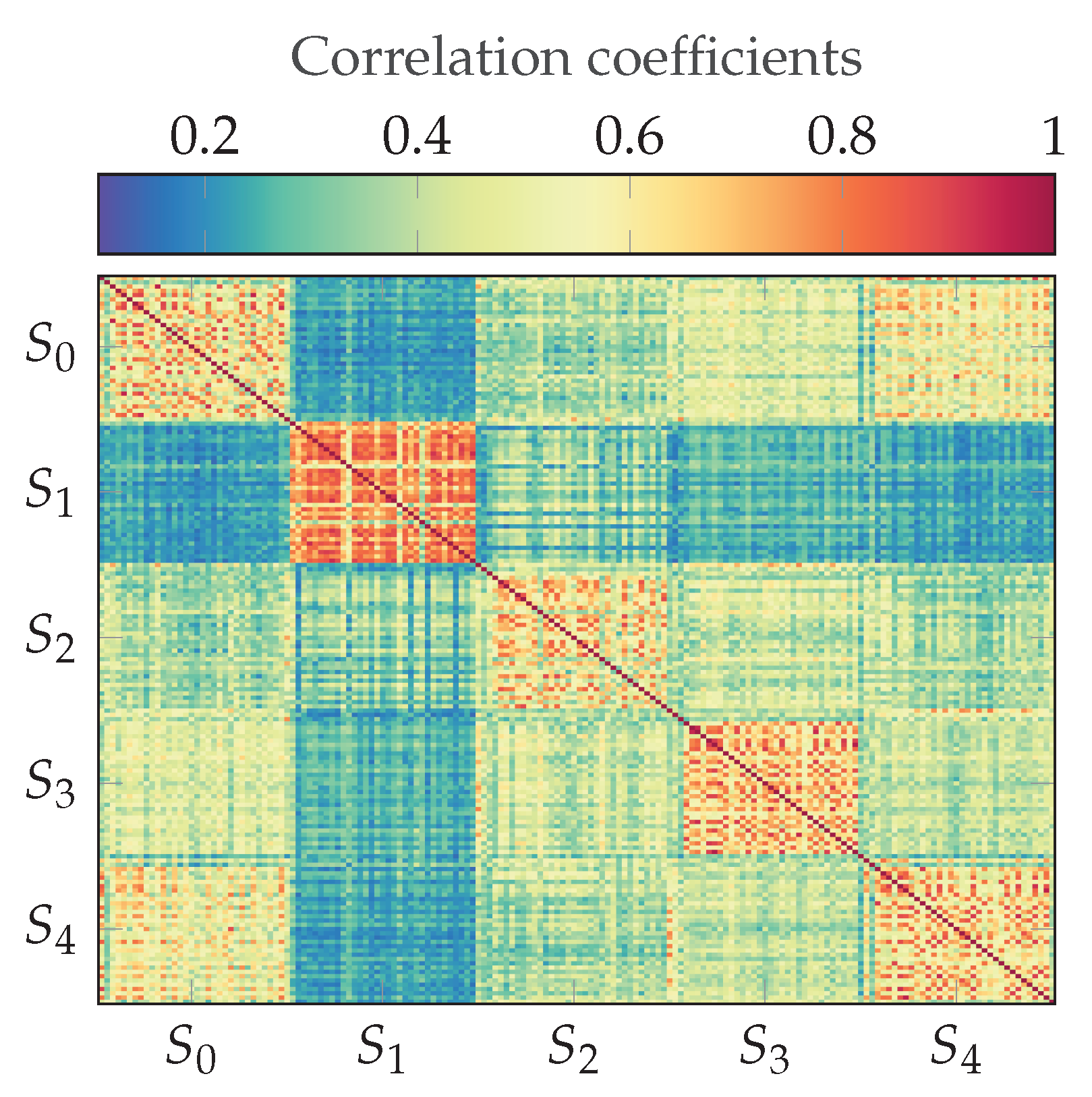
Figure 9 shows the correlation matrix for all 170 signals considered. This allows for the different vibration behaviour of the individual damage levels (
–
) of the gear to be compared with the intact tooth mesh
. Based on the periodic behaviour of the tooth meshes, a statistically representative set of 34 meshes of each damage level as well as the intact mesh were recorded.The individual damage levels are summarised as blocks and labelled on the y- and x-axis in the figure.
The main diagonal of the matrix shows the correlation of the respective signal with itself. Accordingly, the main diagonal shows correlation coefficients of 1. Furthermore, the blocks on the main diagonal also show increased values, due to the similarity of the individual signals of a damage level. The other blocks thus show the similarity between the individual damage levels. Noticeably, the block from
to
shows a very high overall correlation. This can be explained by the more distinctive, recurring vibration signal that occurs due to the damage. Furthermore, the blocks between
and
to
show very low correlations overall and thus little similarity to the vibration signal of the damaged meshing. A slightly increased similarity occurs between
and
. In order to make a better statement about the behaviour of the individual damage classes in relation to each other, the correlation coefficients of the individual blocks are averaged. Furthermore, these correlation matrices are determined for all investigated rotational speeds. These matrices are also averaged.
Figure 10 shows the correlation matrices of the measurements of the gearbox with damage at gear
(left) and gear
(right) averaged over the speeds. In addition, the mean correlation coefficients are shown in the blocks.
The main diagonals of both correlation matrices show the highest values of the respective damage levels in this observation. This can be explained by the high similarity of the periodically occurring gear meshing. Overall, the mean correlation coefficients of the gearbox with damage to gear show significantly higher correlation coefficients than those of the gearbox with damage to gear , due to the longer signal length caused by the slower rotational speed. For the correlation matrix of the measurement series on the gearbox with damage to , it can be seen that the damage level clearly distinguishes itself from the others. It shows an increased correlation of 0.71 to the signals among each other. Furthermore, clearly differs from , and . The slight similarity of to indicates that the damage level also exhibits recognisable characteristics. The damages and show the highest similarity to the reference signal . From this it is concluded that these two signals do not show clear distinguishability and thus the damage level cannot be detected. The correlation matrix of the measurement series on the gearbox with damage to shows a comparable pattern. Here, especially damages and , stand out from the other damages and show an increased correlation to each other. Furthermore, damage shows the highest correlation among the signals, due to the distinctive signal behaviour already recognised in the spectrograms. Since damages and show the greatest similarity to the reference signals , no distinguishability of the damages appears to be possible.
Overall, based on this investigation, damages and show a recognisable behaviour in the time domain for both gears, since they stand out due to their increased correlation to each other and also due to their lower correlation to damages and , as well as the signals of the intact tooth meshing .
3.3. Recognisability of Gear Damage in the Frequency Domain
In this section, the previously segmented signals will be compared in the frequency domain in order to make statements about the recognisability of the damages via a further distinguishing feature. For the investigations in the frequency domain, the segmented signals are transformed into the frequency domain. For this, the discrete Fourier transformation
of a discrete signal
is used. This was already implicitly used in the calculation of the STFT in
Section 2.2. It results in
N describes the number of frequencies. A window function is used to avoid spectral leakage. The discrete Fourier transformation (DFT) of the windowed signal
therefore results in
describes the window function. The FFT is used as an implementation of the DFT. To avoid unequal signal lengths in the frequency range, zero padding [
23] is used and zeros are added to the vector after the windowing. The information content of the resulting frequency signal is not changed by zero padding, but the spectrum is smoothed by the increased frequency resolution. The new vector length is chosen based on the longest signal (at a rotational speed of 100 rpm) to the next higher power of two. After calculating all spectra
for each damage level and rotational speed, an averaged spectrum
of the respective damage level is calculated.
In the following, the averaged spectra for the measurement series of the gearbox with damage to the gear and subsequently that for damage to the gear are considered. The considered frequency range up to 22 kHz results from the linear range of the sensor up to this frequency.
Figure 11 shows that all spectra have a more distinctive behaviour in the lower frequency range. Overall, the higher frequencies show lower amplitudes. In the range below 1 kHz and above 13.5 kHz, the spectra hardly show a distinguishable behaviour. The figure shows that the largest damage,
, results in a particularly significant difference. The frequency range between 1 kHz and 9 kHz shows clearly more distinctive amplitudes. Further, smaller distinctive frequency bands occur at approximately 10 kHz, 11.5 kHz and 13 kHz. For the spectrum of the second largest damage
, differences in the spectra are also noticeable. The frequency bands around 1.5 kHz and 7 kHz especially show higher amplitudes. The spectra of damages
and
show no recognisable differences to the reference signal at all.
Figure 12 shows a significantly better resolution compared to the previous observation, due to the longer signal length resulting from the lower speed during the second gearbox stage. Furthermore, a decreasing signal amplitude can be recognised at higher frequencies. When comparing the spectra, a very similar spectra pattern can be observed for frequencies above 5 kHz, which do not show a clear differentiation. The greatest difference can once again be determined for damage level
. From 0.5 kHz to 2.5 kHz, several distinctive frequency bands appear. Another distinct frequency band occurs at approximately 3.7 kHz. Likewise, more distinctive frequency bands also occur for damage level
. These are mainly in ranges from 0.5 kHz to 1.5 kHz, 2.1 kHz to 2.5 kHz and at about 3.7 kHz. For damage levels
and
, there are no noticeable differences to the reference signal. Overall, based on this investigation, damage levels
and
of both gearboxes show a recognisable behaviour in the frequency domain, as they stand out due to their distinctive frequencies. Damages
and
of this gearbox do not show any differences to the reference signal. Since the examinations in the time and frequency domain coincide with regard to the recognisable damage levels, it is assumed that only damage levels
and
are recognisable for both gears. When comparing the values from
Table 2, it can be implied that no generally applicable value can be given for the recognisability of damage levels. Different gears therefore show different behaviour in vibration signals with regard to recognisability.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}