
Tire Contact Force Equations for Vision-Based Vehicle Weight Identification

 , ,
, ,
Abstract
:1. Introduction
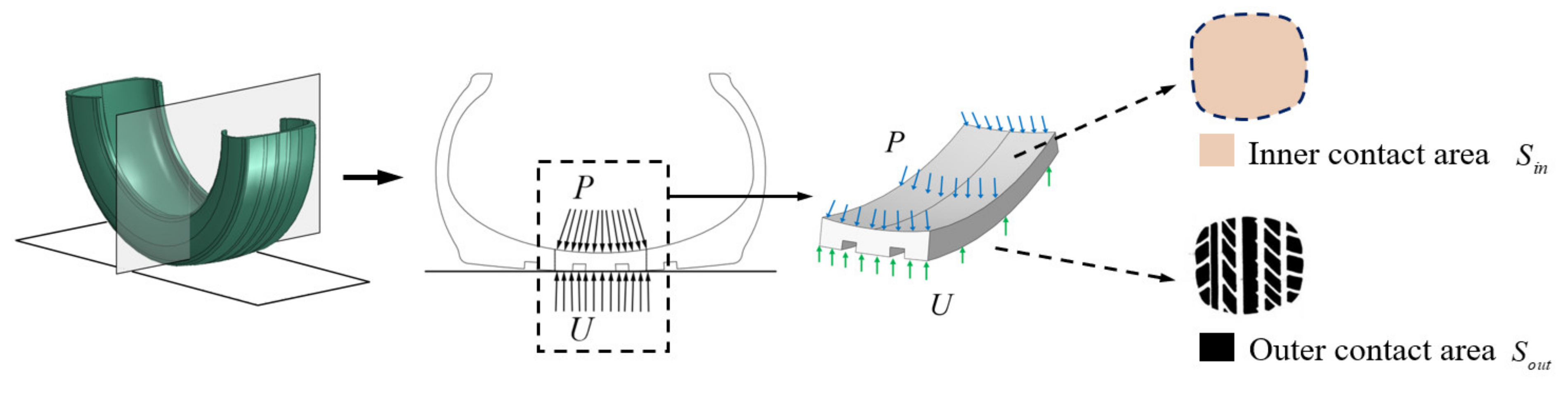
2. Theoretical Analysis of Tire–Road Contact Mechanism
3. Tire–Road Contact Force Equations through Numerical Analysis
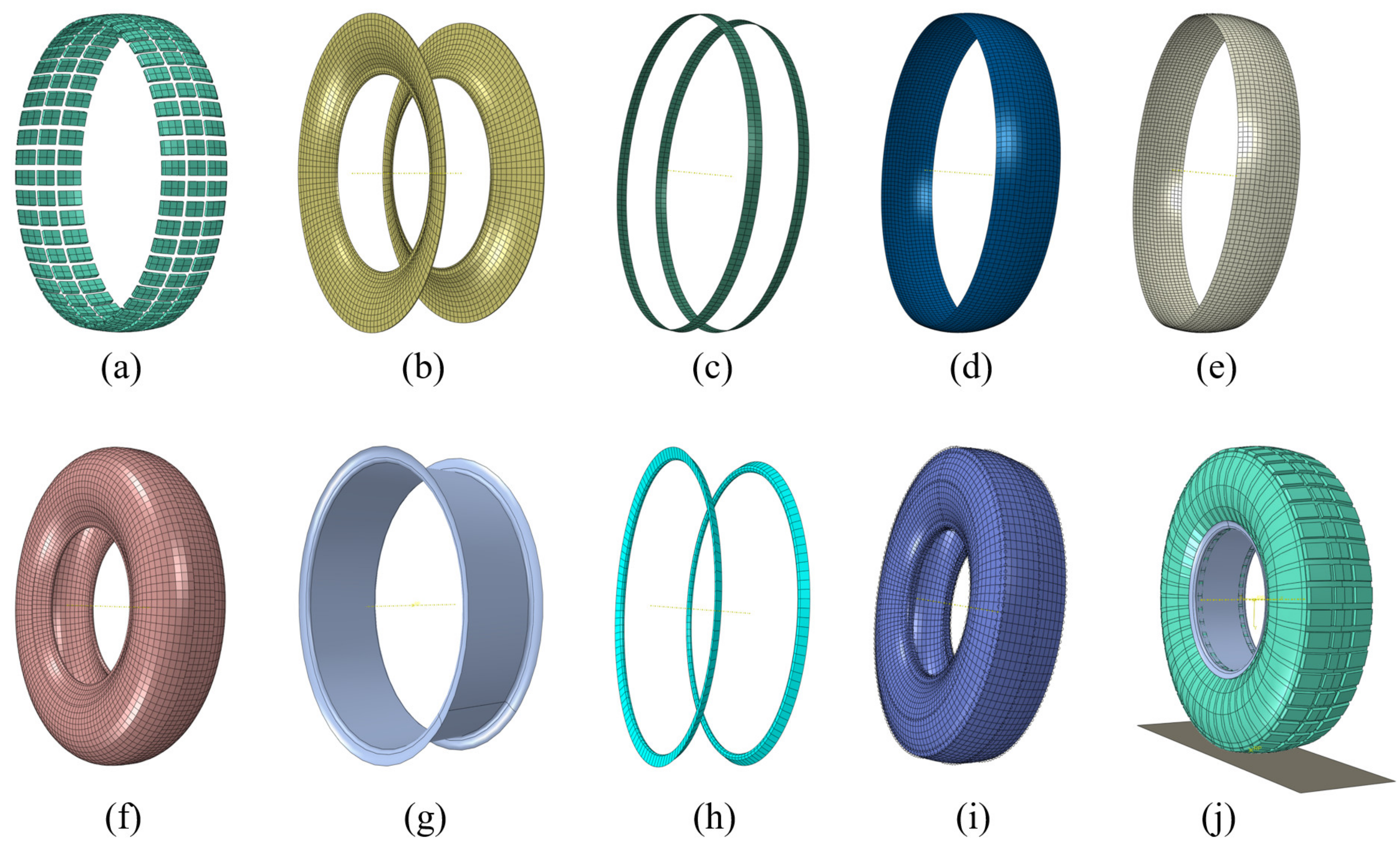
3.1. Establishment of Tire FE Model
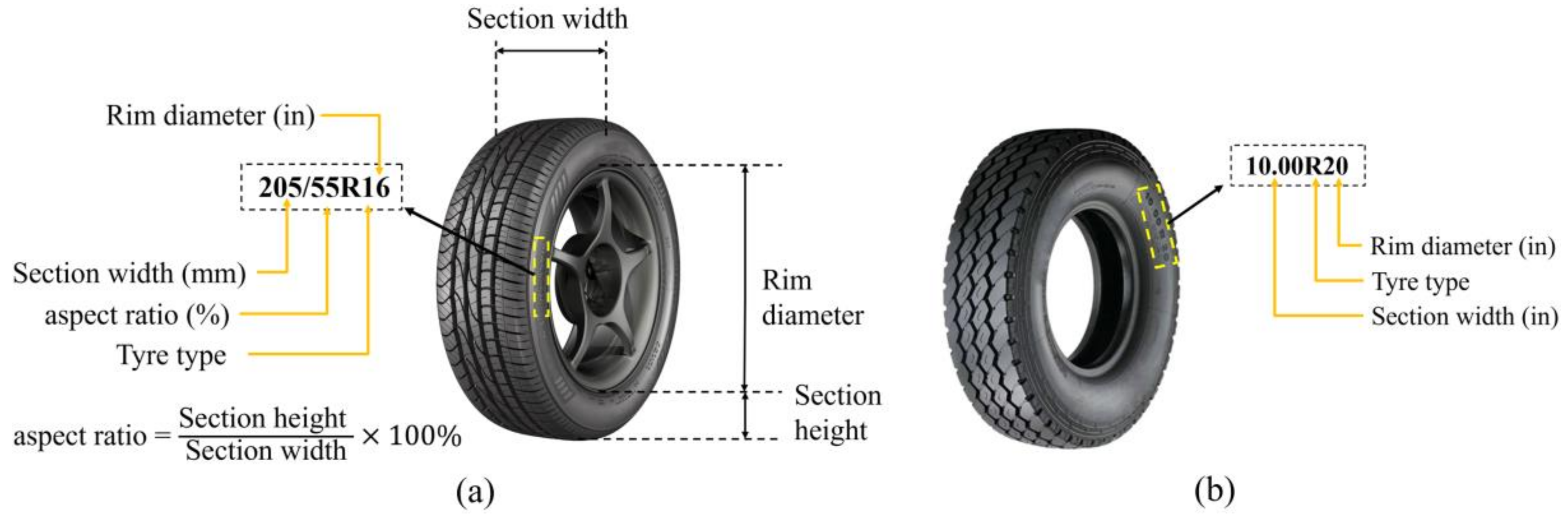
3.1.1. Tire Classification and Selection
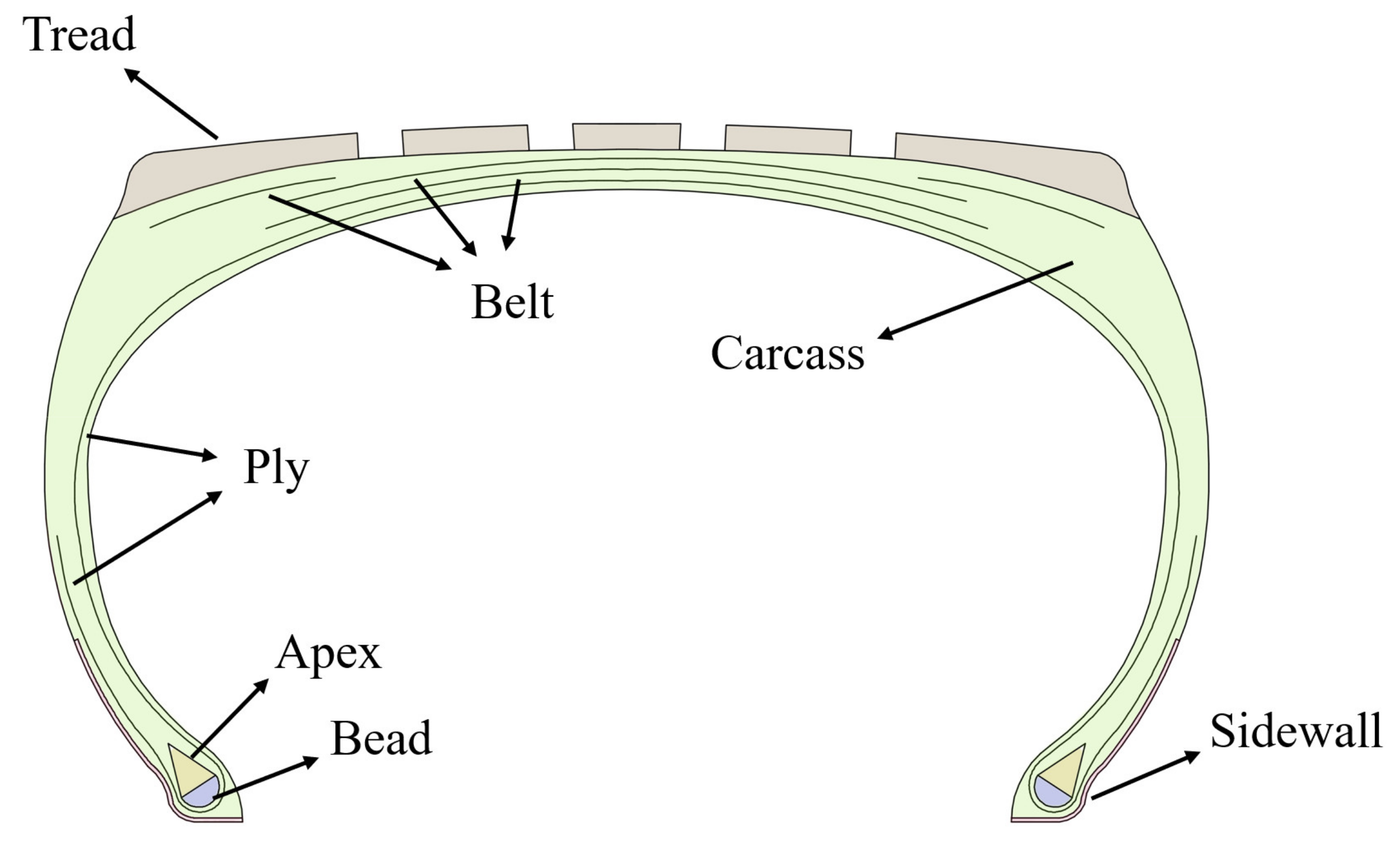
3.1.2. Tire Section and Material
D Tire Model
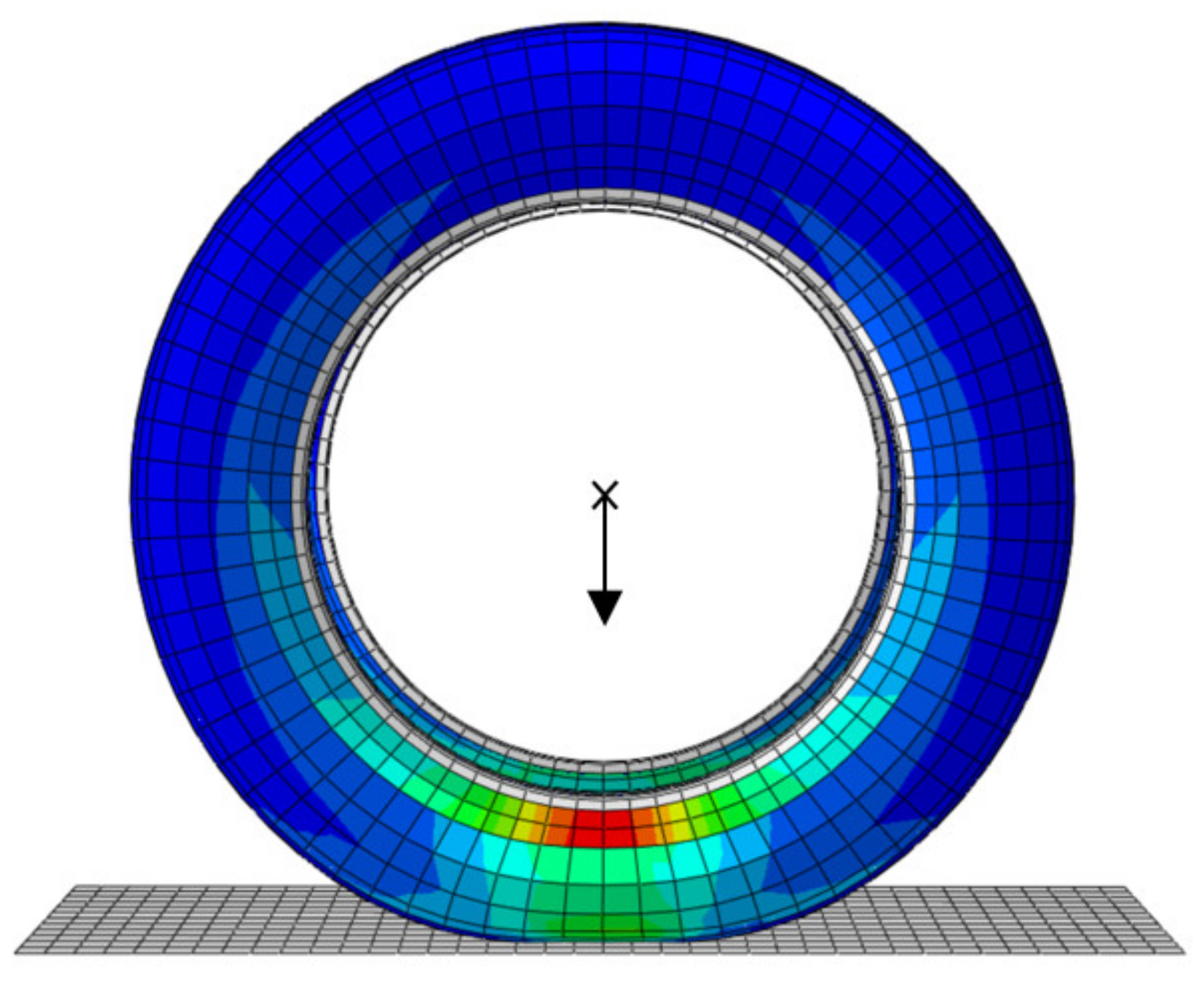
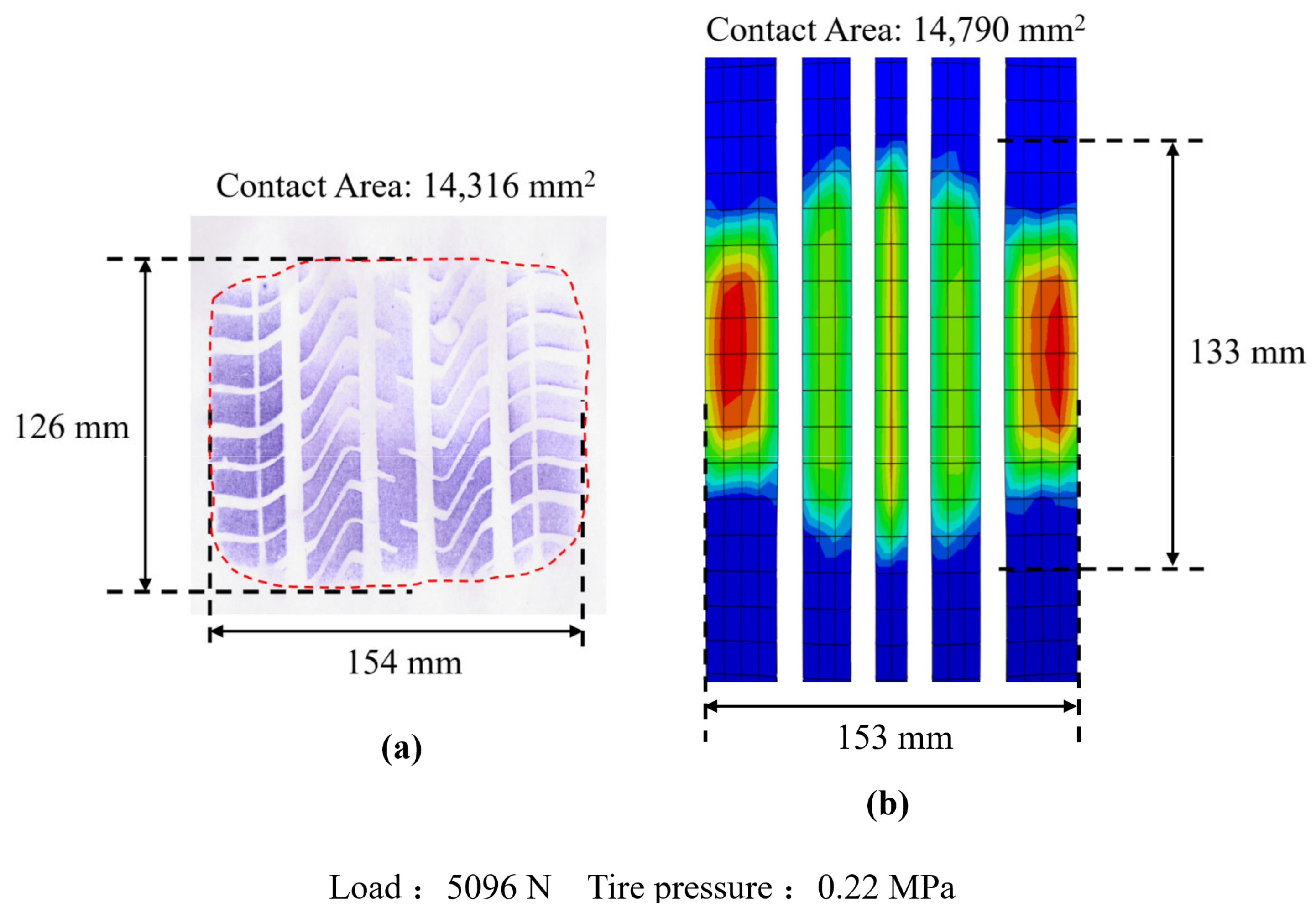
3.2. Verification of Tire FE Model
3.3. Tire Contact Force Equations
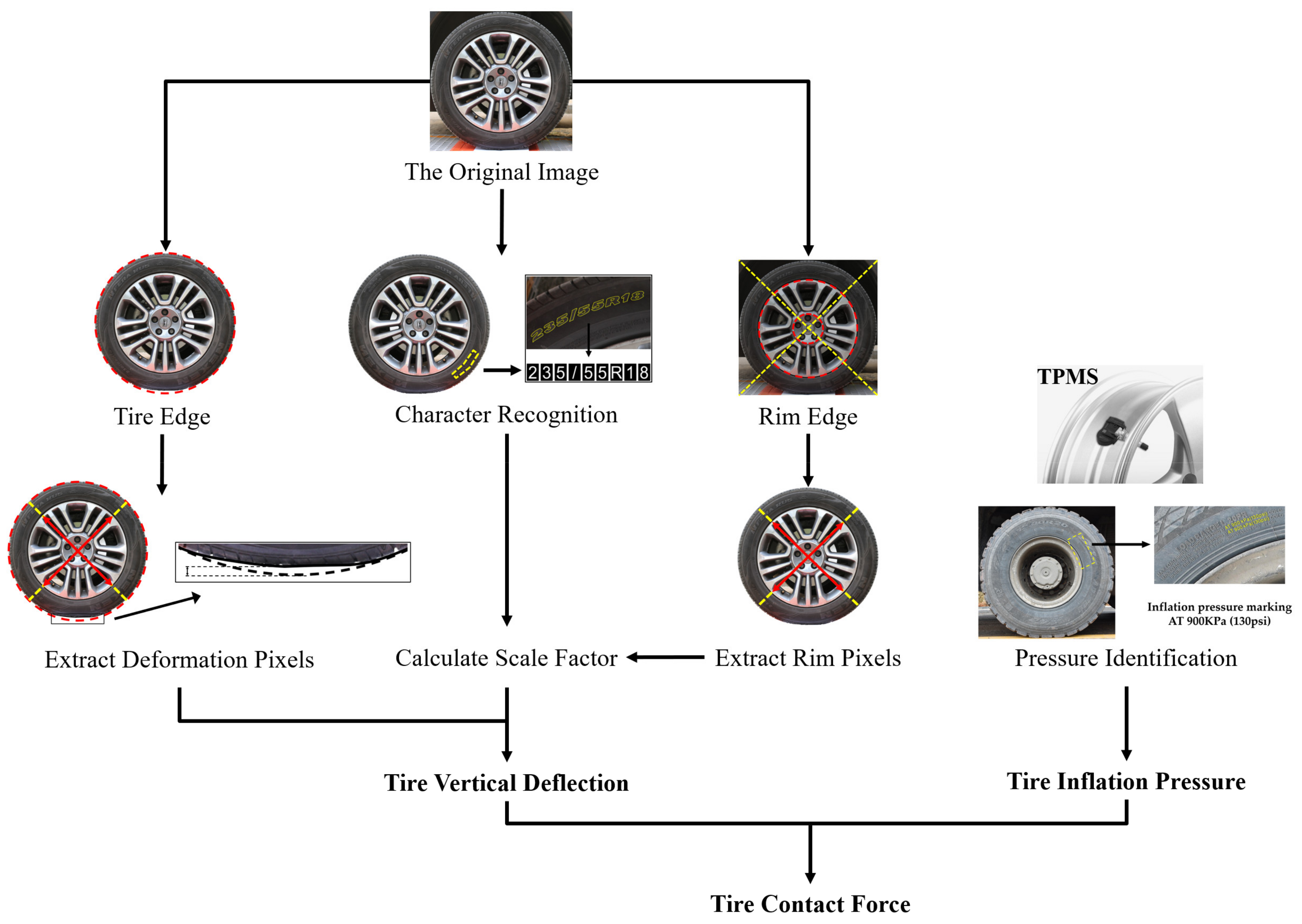
4. Methodology of Vision-Based Vehicle Weight Identification
5. Experimental Validation
- (1)
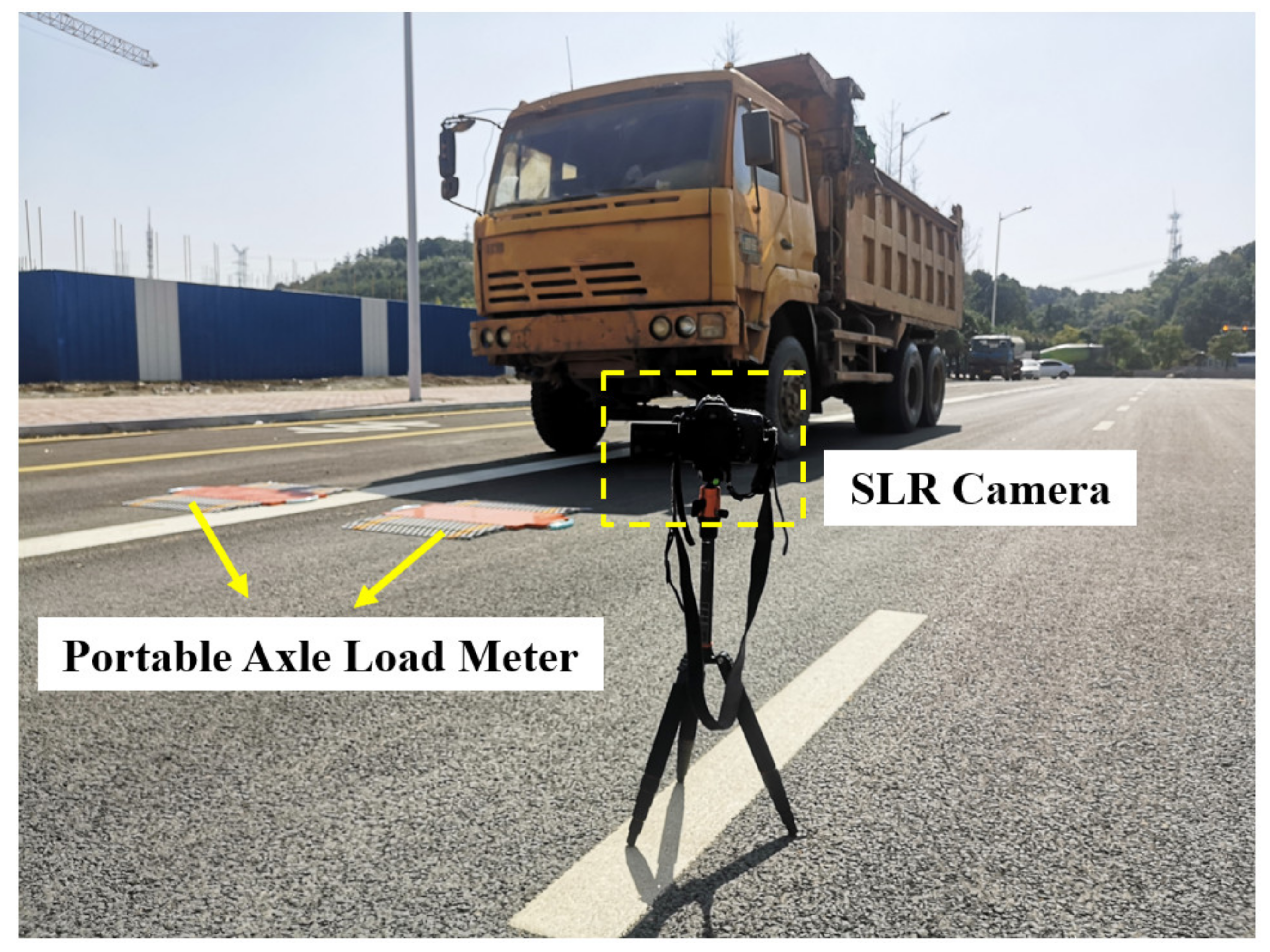
- Actual weight measurement: the portable wireless axle weigh pad was used to measure the stationary axle weight and gross weight of the vehicle. It should be noted that the vehicles were all controlled by the same driver to eliminate the influence of the driver’s weight.
- (2)
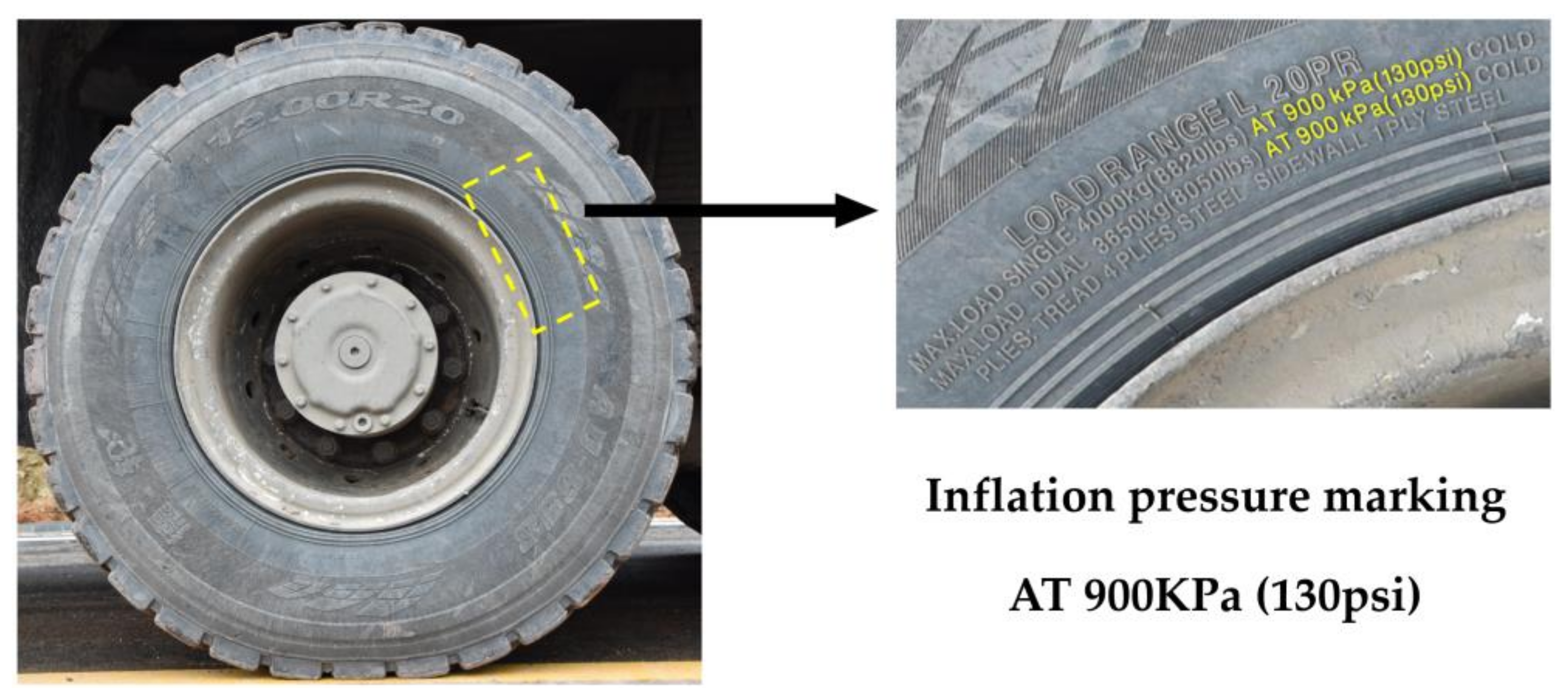
- Actual inflation pressure measurement: since most trucks do not have a TMPS, the actual inflation pressure of each truck tire was measured by the pressure detector, which was also used to calibrate the pressure identified using the computer vision method mentioned in Section 4.
- (3)
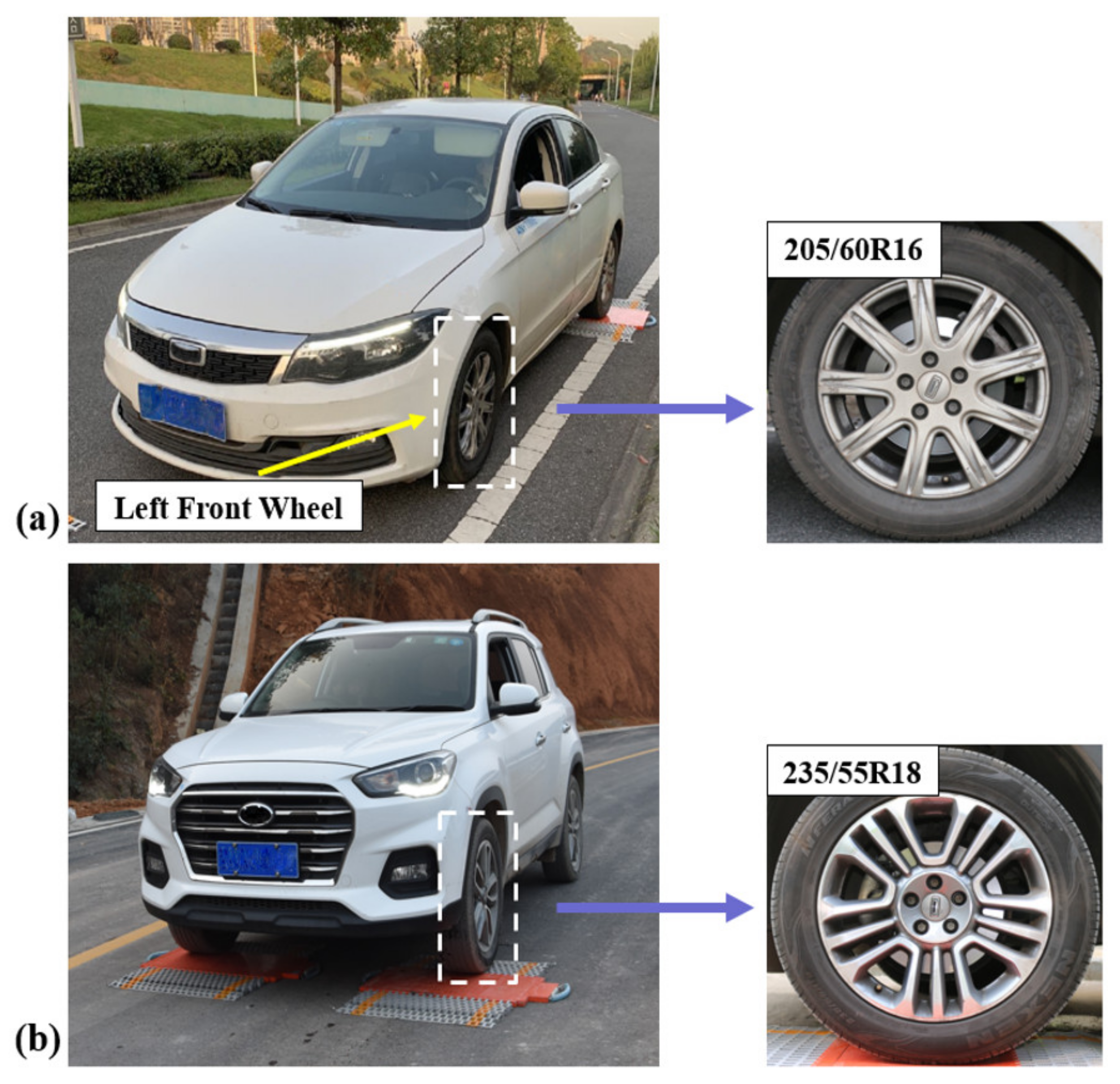
- Image acquisition: the tested vehicles traveled on the road at a speed of approximately 15 km/h. The camera was set up on the roadside 5–7 m away from the vehicle and the optical axis was configured as perpendicular to the vehicle traveling direction. Tire images with a resolution of 6000 × 4000 pixels were captured.
- (4)
- Results and evaluation: the proposed CV-based method was used to calculate the tire contact force in each tire. The absolute error was used to evaluate the accuracy of the weight estimates
5.1. Weight Identification of Passenger Cars
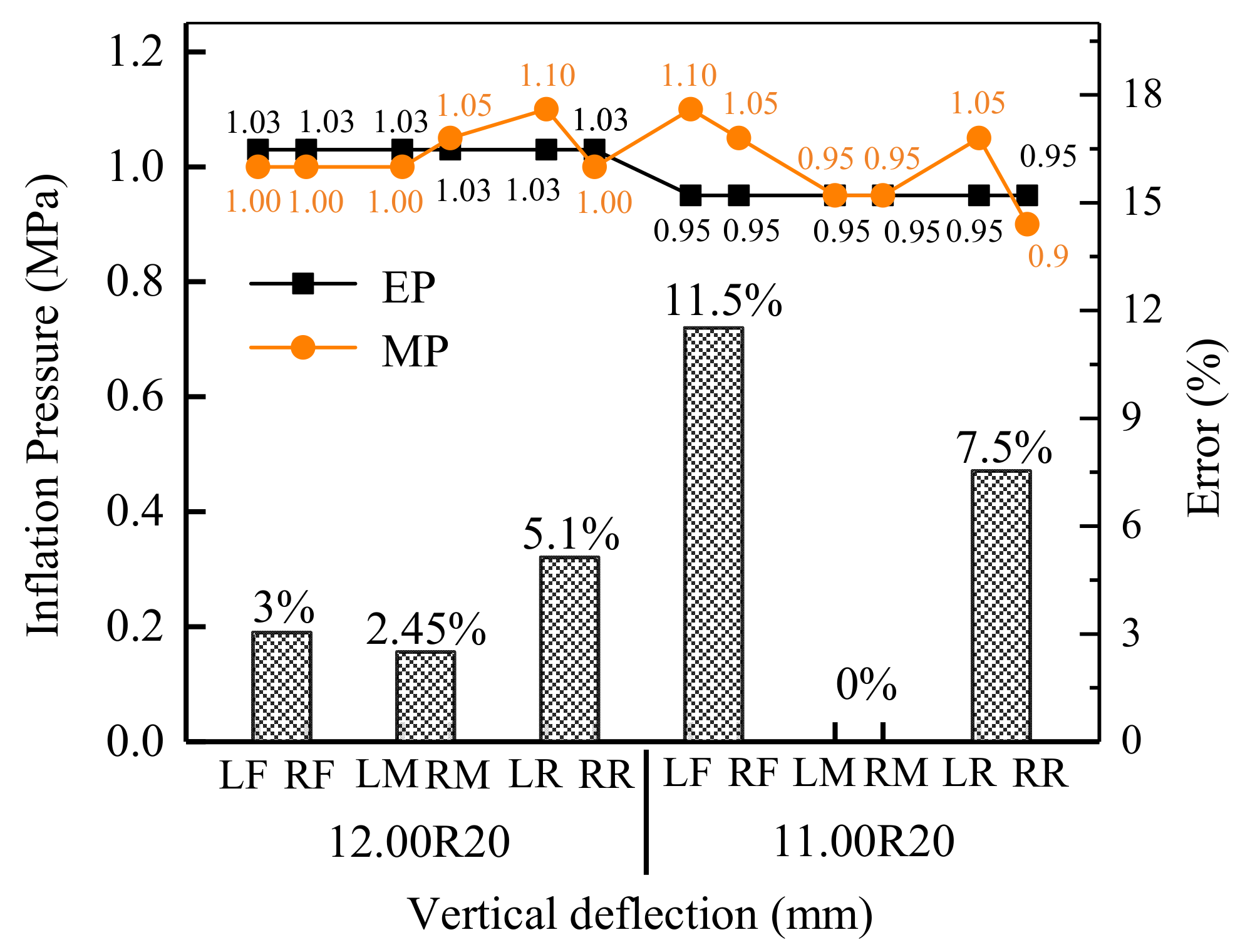
5.2. Weight Identification of Trucks
5.3. Remarks
6. Conclusions
- (1)
- The theoretical equation for the tire contact forces was developed based on the tire–road contact mechanics. The relationship between the contact force and the tire inflation pressure, tire vertical deflection, and other physical parameters was established for the vehicle weight identification.
- (2)
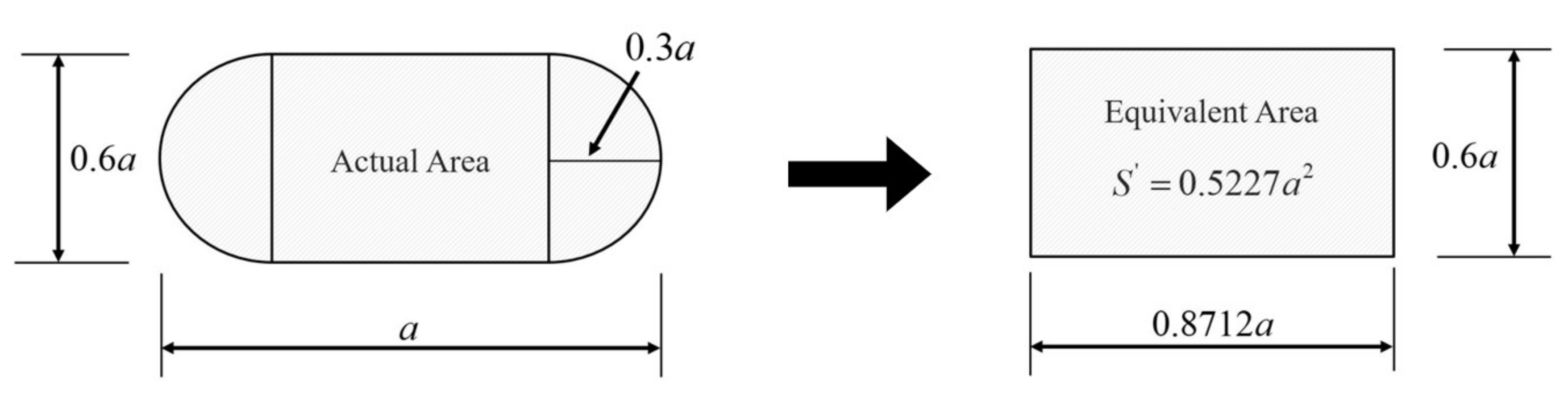
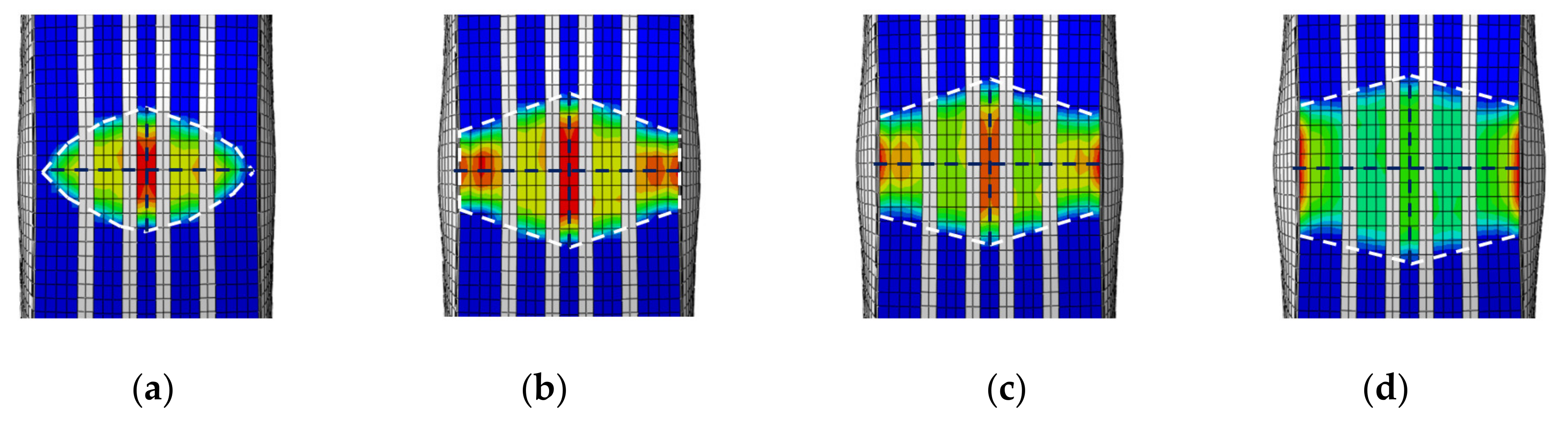
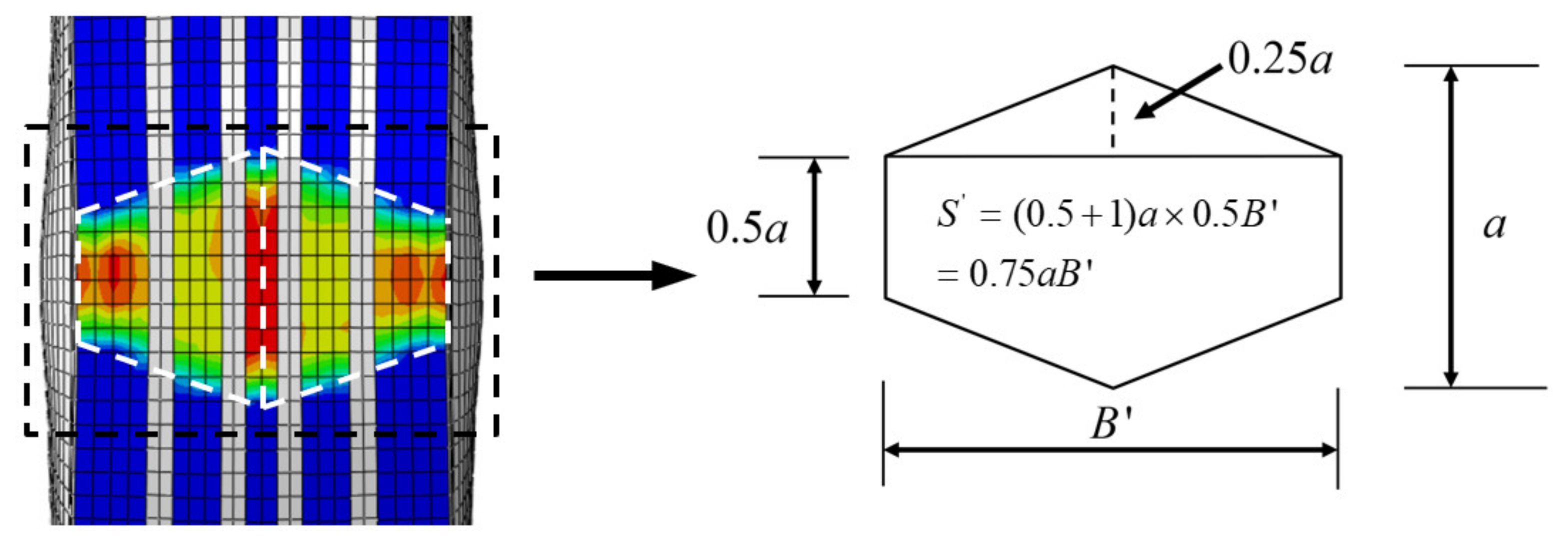
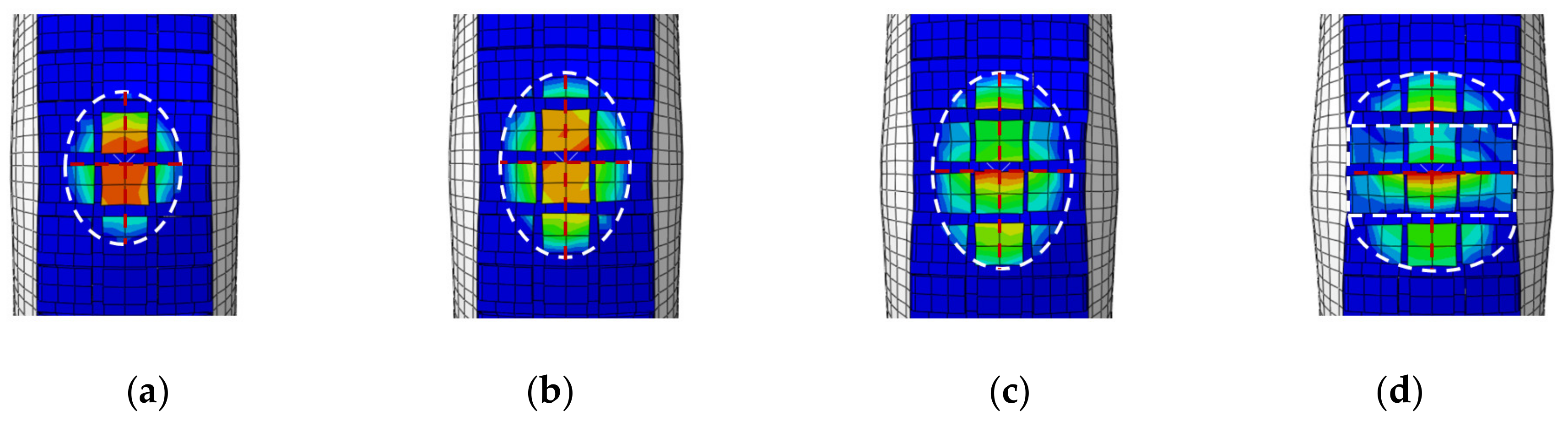
- Numerical 3D models for different types of tires were established to analyze the deformation process of the tire. Simulation results show that the tire footprint approximates different shapes at different deformation stages. For passenger cars, the tire footprint is not a constant oval shape as assumed. It is actually a rhombus when the contact width is smaller than the tread width, and a hexagon when the contact width reaches the tread width. As for the tires of heavy trucks, the footprint is an oval when the contact width is smaller than the tread width, and a rectangle with two half circles on each side afterward.
- (3)
- The vision-based vehicle weight identification method was established by combining the derived theoretical equations and computer vision techniques. The tire vertical deflection, inflation pressure, and tire specification can be extracted from the tire image using computer vision techniques, which are then input into the theoretical equation to calculate the contact force of each tire, and finally, estimate the vehicle weight by summing the contact forces of all the tires.
- (4)
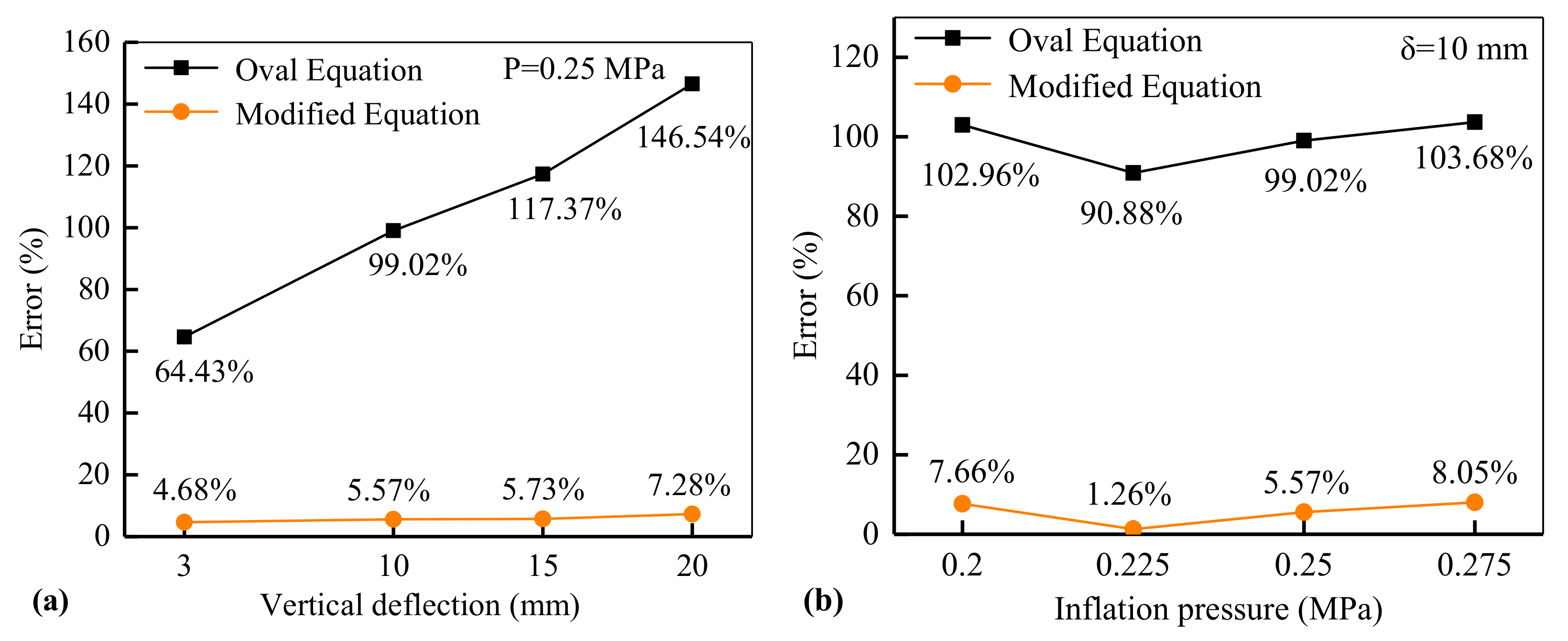
- Two passenger cars and two trucks with tires of different specifications were used in field tests to verify the accuracy of the proposed method. The results showed that the identified weights were in good agreement with the actual measured weights, which proves the performance of the proposed method.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Han, Y.; Li, K.; Cai, C.S.; Wang, L.; Xu, G. Fatigue reliability assessment of long-span steel-truss suspension bridges under the combined action of random traffic and wind loads. J. Bridge Eng. 2020, 25, 04020003. [Google Scholar] [CrossRef]
- Stawska, S.; Chmielewski, J.; Bacharz, M.; Bacharz, K.; Nowak, A. Comparative accuracy analysis of truck weight measurement techniques. Appl. Sci. 2021, 11, 745. [Google Scholar] [CrossRef]
- Xiong, H.; Zhang, Y. Feasibility study for using piezoelectric-based weigh-in-motion (wim) system on public roadway. Appl. Sci. 2019, 9, 3098. [Google Scholar] [CrossRef] [Green Version]
- Richardson, J.; Jones, S.; Brown, A.; O’Brien, E.; Hajializadeh, D. On the use of bridge weigh-in-motion for overweight truck enforcement. Int. J. Heavy Veh. Syst. 2014, 21, 83–104. [Google Scholar] [CrossRef]
- He, W.; Ling, T.; OBrien, E.J.; Deng, L. Virtual axle method for bridge weigh-in-motion systems requiring no axle detector. J. Bridge Eng. 2019, 24, 04019086. [Google Scholar] [CrossRef]
- O’Brien, E.J.; Znidaric, A.; Dempsey, A.T. Comparison of two independently developed bridge weigh-in-motion systems. Int. J. Heavy Veh. Syst. 1999, 6, 147–161. [Google Scholar] [CrossRef] [Green Version]
- Jacob, B.; Feypell-de La Beaumelle, V. Improving truck safety: Potential of weigh-in-motion technology. IATSS Res. 2010, 34, 9–15. [Google Scholar] [CrossRef] [Green Version]
- Moses, F. Weigh-in-motion system using instrumented bridges. Transp. Eng. J. ASCE 1979, 105, 233–249. [Google Scholar] [CrossRef]
- Yu, Y.; Cai, C.S.; Deng, L. State-of-the-art review on bridge weigh-in-motion technology. Adv. Struct. Eng. 2016, 19, 1514–1530. [Google Scholar] [CrossRef]
- Lydon, M.; Taylor, S.E.; Robinson, D.; Mufti, A.; Brien, E.J.O. Recent developments in bridge weigh in motion (B-WIM). J. Civ. Struct. Health Monit. 2016, 6, 69–81. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Li, H.; Bao, Y.; Li, N.; Jin, Y. Identification of spatio-temporal distribution of vehicle loads on long-span bridges using computer vision technology. Struct. Control Health Monit. 2015, 23, 517–534. [Google Scholar] [CrossRef]
- Ojio, T.; Carey, C.H.; OBrien, E.J.; Doherty, C.; Taylor, S.E. Contactless bridge weigh-in-motion. J. Bridge Eng. 2016, 21, 04016032. [Google Scholar] [CrossRef] [Green Version]
- Dan, D.; Ge, L.; Yan, X. Identification of moving loads based on the information fusion of weigh-in-motion system and multiple camera machine vision. Measurement 2019, 144, 155–166. [Google Scholar] [CrossRef]
- Ge, L.; Dan, D.; Li, H. An accurate and robust monitoring method of full-bridge traffic load distribution based on yolo-v3 machine vision. Struct. Control Health Monit. 2020, 27, e2636. [Google Scholar] [CrossRef]
- Feng, M.Q.; Leung, R.Y. Application of computer vision for estimation of moving vehicle weight. IEEE Sens. J. 2020, 21, 11588–11597. [Google Scholar] [CrossRef]
- Feng, M.Q.; Leung, R.Y.; Eckersley, C.M. Non-contact vehicle weigh-in-motion using computer vision. Measurement 2020, 153, 107415. [Google Scholar] [CrossRef]
- Pacejka, H.B.; Besselink, I.J.M. Magic formula tyre model with transient properties. Veh. Syst. Dyn. 1997, 27, 234–249. [Google Scholar] [CrossRef]
- Pacejka, H.B.; Bakker, E. The magic formula tyre model. Veh. Syst. Dyn. 1992, 21, 1–18. [Google Scholar] [CrossRef]
- Kiencke, U.; Nielsen, L. Automotive Control Systems: For Engine, Driveline, and Vehicle; Springer: New York, NY, USA, 2000. [Google Scholar]
- Brach, R.M.; Brach, R.M. Modeling Combined Braking and Steering Tire Forces; Technical Paper 2000-01-0357; SAE International: Warrendale, PA, USA, 2000. [Google Scholar] [CrossRef] [Green Version]
- Canudas-de-Wit, C.; Tsiotras, P.; Velenis, E.; Basset, M.; Gissinger, G. Dynamic friction models for road/tire longitudinal interaction. Veh. Syst. Dyn. 2003, 39, 189–226. [Google Scholar] [CrossRef]
- Velenis, E.; Tsiotras, P. Extension of the lugre dynamic tire friction model to 2d motion. In Proceedings of the 10th IEEE Mediterranean Conference on Control and Automation-MED, Lisbon, Portugal, 9–12 July 2002; pp. 9–12. [Google Scholar]
- Guo, K.; Lu, D.; Chen, S.; Lin, W.; Lu, X. The unitire model: A nonlinear and non-steady-state tyre model for vehicle dynamics simulation. Veh. Syst. Dyn. 2005, 43, 341–358. [Google Scholar] [CrossRef]
- Ghandour, R.; Victorino, a.; Doumiati, M.; Charara, A. Tire/road friction coefficient estimation applied to road safety. In Proceedings of the 18th Mediterranean Conference on Control and Automation, MED’10, Marrakech, Morocco, 23–25 June 2010; pp. 1485–1490. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Al-Qadi, I.; Stanciulescu, I. Simulation of tyre-pavement interaction for predicting contact stresses at static and various rolling conditions. Int. J. Pavement Eng. 2012, 13, 310–321. [Google Scholar] [CrossRef]
- Cao, P.; Zhou, C.; Jin, F.; Feng, D.; Fan, X. Tire-pavement contact stress with 3d finite-element model—Part 1: Semi-steel radial tires on light vehicles. J. Test. Eval. 2016, 44, 788–800. [Google Scholar] [CrossRef]
- He, H.; Li, R.; Yang, Q.; Pei, J.; Guo, F. Analysis of the tire-pavement contact stress characteristics during vehicle maneuvering. KSCE J. Civ. Eng. 2021, 25, 2451–2463. [Google Scholar] [CrossRef]
- Kong, X.; Zhang, J.; Wang, T.; Deng, L.; Cai, C. Non-contact vehicle weighing method based on tire-road contact model and computer vision techniques. Mech. Syst. Signal Process. 2022, 174, 109093. [Google Scholar] [CrossRef]
- Huang, Y.H. Pavement Analysis and Design; Prentice Hall: Englewood Cliffs, NJ, USA, 1993. [Google Scholar]
- Liang, S. Handbook of Rubber Industry; Chemical Industry Press, Inc.: Beijing, China, 1989. [Google Scholar]
- GB/T 2977-2016; Size Designation, Dimensions, Inflation Pressure and Load Capacity for Truck Tires. Available online: http://openstd.samr.gov.cn/bzgk/gb/newGbInfo?hcno=B36BB626FA9AC00F746BFBF0FDED8884 (accessed on 1 June 2021).
- Puhn, F. How to Make Your Car Handle; HPBooks: New York, NY, USA, 1976. [Google Scholar]
- Gent, A.N.; Walter, J.D. The Pneumatic Tire; US Department of Transportation: Washington, DC, USA, 2006.
- Yoder, E.J.; Witczak, M.W. Principles of Pavement Design; Wiley: New York, NY, USA, 1974. [Google Scholar]
- GB/T 2978-2014; Size Designation, Dimensions, Inflation Pressure and Load Capacity for Passenger Car Tires. Available online: http://openstd.samr.gov.cn/bzgk/gb/newGbInfo?hcno=77D4C9A3881377D0EF3E7B63E399E373 (accessed on 1 June 2021).
- GB/T 2980-2018; Size Designation, Dimensions, Inflation Pressure and Load Capacity for Earth-Mover Tyres. Available online: http://openstd.samr.gov.cn/bzgk/gb/newGbInfo?hcno=1D55E028BDF80844A1DAC1280950895F (accessed on 1 June 2021).
- GB/T 2979-2017; Size Designation, Dimensions, Inflation Pressure and Load Capacity for Agricultural Tyres. Available online: http://openstd.samr.gov.cn/bzgk/gb/newGbInfo?hcno=4AB2DE151CB5F28CD997BD69E0F07A9B (accessed on 1 June 2021).
- GB/T 2982-2014; Designation, Dimensions, Inflation Pressure and Load Capacity of Pneumatic Tyres for Industrial Vehicles. Available online: http://openstd.samr.gov.cn/bzgk/gb/newGbInfo?hcno=2E8D3B65DC6561A6A2C2445E84AFE0C0 (accessed on 1 June 2021).
- Federal Register. Tire Safety Information. 2002. Available online: https://www.federalregister.gov/documents/2003/06/26/03-15875/tire-safety-information (accessed on 1 June 2021).
- Guo, M.; Zhou, X. Tire-pavement contact stress characteristics and critical slip ratio at multiple working conditions. Adv. Mater. Sci. Eng. 2019, 2019, 5178516. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Xie, Z.; Zhang, J. Measurement of vehicle-bridge-interaction force using dynamic tire pressure monitoring. Mech. Syst. Signal Process. 2018, 104, 370–383. [Google Scholar] [CrossRef]
- Xu, Y.; Wei, M. Multi-view clustering toward aerial images by combining spectral analysis and local refinement. Future Gener. Comput. Syst. 2021, 117, 138–144. [Google Scholar] [CrossRef]
- Revol, C.; Jourlin, M. A new minimum variance region growing algorithm for image segmentation. Pattern Recognit. Lett. 1997, 18, 249–258. [Google Scholar] [CrossRef]
- Phornphatcharaphong, W.; Eua-Anant, N. Edge-based color image segmentation using particle motion in a vector image field derived from local color distance images. J. Imaging 2020, 6, 72. [Google Scholar] [CrossRef]
- Chen, R.; Luo, Y. An improved license plate location method based on edge detection. Phys. Procedia 2012, 24, 1350–1356. [Google Scholar] [CrossRef] [Green Version]
- De Beer, M.; Fisher, C. Stress-in-motion (SIM) system for capturing tri-axial tyre–road interaction in the contact patch. Measurement 2013, 46, 2155–2173. [Google Scholar] [CrossRef]
- De Beer, M.; Sallie, I.M. An appraisal of mass differences between individual tyres, axles and axle groups of a selection of heavy vehicles in South Africa. In Proceedings of the International Conference on Weigh-In-Motion: ICWIM6 (Organized with NATMEC 2012), Dallas, TX, USA, 4–7 June 2012; pp. 514–523. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Type | Tire Specification | |
|---|---|---|
| Passenger Car | 195/55R16 | 205/55R16 |
| 225/55R16 | 225/60R18 | |
| 235/65R18 | 245/60R17 | |
| Truck | 8.00R20 | 9.00R20 |
| 10.00R20 | 11.00R20 | |
| 11.00R22 | 12.00R20 | |
| Contact Length | Contact Width | Contact Area | |
|---|---|---|---|
| Simulation results | 133 mm | 153 mm | 14,790 mm |
| Measured results | 126 mm | 154 mm | 14,316 mm |
| Absolute error (AE) | 5.2% | 0.6% | 3.3% |
| Tire Type | Inflation Pressure (MPa) | Vertical Deflection (mm) | Simulation Force (N) | Oval Equation (N) | Modified Equation (N) |
|---|---|---|---|---|---|
| 205/50R16 | 0.25 | 3 | 1549.5 | 2547.9 | 1622.0 |
| 0.25 | 10 | 4235.1 | 8428.5 | 4471.2 | |
| 0.25 | 15 | 5784.6 | 12,573.6 | 5453.3 | |
| 0.25 | 20 | 6762.7 | 16,672.6 | 6270.5 | |
| 0.2 | 10 | 3322.3 | 6742.8 | 3576.9 | |
| 0.225 | 10 | 3974.1 | 7585.6 | 4024.1 | |
| 0.275 | 10 | 4552.0 | 9271.3 | 4918.3 |
| Tire Type | Inflation Pressure (MPa) | Vertical Deflection (mm) | Simulation Force (N) | Rectangular Equation (N) | Huang Equation (N) | Modified Equation (N) |
|---|---|---|---|---|---|---|
| 11.00R20 | 0.8 | 10 | 14,758.4 | 37,623.7 | 17,676.5 | 15,936.2 |
| 0.8 | 15 | 23,037.7 | 56,194.2 | 26,389.2 | 23,791.1 | |
| 0.8 | 20 | 31,357.9 | 74,603.8 | 35,018.4 | 31,570.7 | |
| 0.8 | 25 | 38,156.4 | 92,852.4 | 43,563.9 | 39,274.9 | |
| 0.7 | 20 | 26,268.3 | 65,278.3 | 30,641.1 | 27,624.4 | |
| 0.9 | 20 | 34,197.8 | 83,929.3 | 39,395.7 | 35,517.1 | |
| 1 | 20 | 36,414.2 | 93,254.7 | 43,773.0 | 39,463.4 |
| Type | Position | Inflation Pressure (MPa) | Vertical Deflection (mm) | Actual Weight (N) | Oval Equation | Modified Equation | ||
|---|---|---|---|---|---|---|---|---|
| Calculated Weight (N) | Error | Calculated Weight (N) | Error | |||||
| Sedan | LF | 0.22 | 16.6 | 9310 | 20,584 | 121.1% | 9624 | 3.3% |
| RF | 0.2 | 14.3 | ||||||
| LR | 0.19 | 10.8 | 6321 | 12,034 | 90.4% | 6812 | 7.7% | |
| RR | 0.17 | 10.2 | ||||||
| SUV | LF | 0.2 | 13.6 | 9996 | 20,339 | 103.5% | 10,646 | 6.5% |
| RF | 0.22 | 12.5 | ||||||
| LR | 0.18 | 10.6 | 8134 | 14,348 | 76.4% | 8723 | 7.2% | |
| RR | 0.2 | 9.7 | ||||||
| Type | Actual Weight (N) | Oval Equation | Modified Equation (N) | ||
|---|---|---|---|---|---|
| Calculated Weight (N) | Error | Calculated Weight (N) | Error | ||
| Sedan | 15,631 | 32,617 | 108.6% | 16,436 | 5.1% |
| SUV | 18,130 | 34,687 | 91.3% | 19,369 | 6.8% |
| Specification | Position | Estimated Pressure (MPa) | Deflection (mm) | Actual Weight (N) | Rectangular Equation | Huang Equation | Modified Equation | |||
|---|---|---|---|---|---|---|---|---|---|---|
| Calculated Weight (N) | Error | Calculated Weight (N) | Error | Calculated Weight (N) | Error | |||||
| 12.00R20 | LF | 1.03 | 18.0 | 77,224 | 205,052 | 165.5% | 94,299 | 22.1% | 84,642 | 9.6% |
| RF | 1.03 | 21.9 | ||||||||
| LM | 1.03 | 20.2 | 165,228 | 433,395 | 162.3% | 199,290 | 20.6% | 179,669 | 8.7% | |
| RM | 1.03 | 22.0 | ||||||||
| LR | 1.03 | 19.6 | 170,618 | 432,364 | 153.4% | 198,816 | 16.5% | 179,242 | 5.1% | |
| RR | 1.03 | 22.5 | ||||||||
| 11.00R20 | LF | 0.95 | 14.1 | 60,074 | 133,455 | 122.2% | 62671 | 4.3% | 56,501 | 6.0% |
| RF | 0.95 | 15.9 | ||||||||
| LM | 0.95 | 20.5 | 127,890 | 326,401 | 155.2% | 153,229 | 19.8% | 138,143 | 8.0% | |
| RM | 0.95 | 16.3 | ||||||||
| LR | 0.95 | 21.0 | 136,122 | 334,253 | 145.6% | 156,908 | 15.3% | 141,460 | 3.9% | |
| RR | 0.95 | 16.7 | ||||||||
| Specification | Actual Weight (N) | Rectangular Equation | Huang Equation | Modified Equation | |||
|---|---|---|---|---|---|---|---|
| Calculated Weight (N) | Error | Calculated Weight (N) | Error | Calculated Weight (N) | Error | ||
| 12.00R20 | 413,070 | 1,070,811 | 159.2% | 492,406 | 19.2% | 443,554 | 7.4% |
| 11.00R20 | 324,086 | 794,109 | 145.0% | 372,809 | 15.0% | 336,105 | 3.7% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, X.; Wang, T.; Zhang, J.; Deng, L.; Zhong, J.; Cui, Y.; Xia, S. Tire Contact Force Equations for Vision-Based Vehicle Weight Identification. Appl. Sci. 2022, 12, 4487. https://doi.org/10.3390/app12094487
Kong X, Wang T, Zhang J, Deng L, Zhong J, Cui Y, Xia S. Tire Contact Force Equations for Vision-Based Vehicle Weight Identification. Applied Sciences. 2022; 12(9):4487. https://doi.org/10.3390/app12094487
Chicago/Turabian StyleKong, Xuan, Tengyi Wang, Jie Zhang, Lu Deng, Jiwei Zhong, Yuping Cui, and Shudong Xia. 2022. "Tire Contact Force Equations for Vision-Based Vehicle Weight Identification" Applied Sciences 12, no. 9: 4487. https://doi.org/10.3390/app12094487