
Reliability Enhancement Driven by ANN for Lighting Control System in Highway Tunnels

Abstract
:1. Introduction
2. Research Status of Tunnel Lighting System
2.1. Evolution of Tunnel Lights
2.2. Key Requirements of Tunnel Lighting System
- Color temperature and color rendering index.
- Luminance reduction factor.
- Road surface luminance.
- Uniformity of road surface luminance.
- Visual cognition distance.
- Greatly enhanced cyber security to ensure reliable operation and data transfer.
- Meet the highest tunnel safety standards to improve driver safety.
- Helpful to reduce traffic accidents and tunnel closures.
- Dynamic and real-time response to light conditions to help drivers’ eyes acclimatize as they enter and exit the tunnel.
- Correct lighting levels at every stage.
- Manage lighting easily with intelligent control and online diagnostics.
- Less downtime and minimized disruption of traffic flow.
- Nearly always ready for unexpected events.
- Simple process to refurbish tunnel lights and upgrade components of the lighting system.
- Easy to manage and operate components of the lighting system remotely.
- Lower MTBF with both tunnel lights and control system.
- Reduced carbon footprint.
- Decrease in maintenance costs.
- Enhanced driving experience and safety guarantee without significant cost increase.
- Balance of the main requirements of tunnel lighting, ensuring visual comfort and uniformity of light distribution, energy efficiency and ease of maintenance.
2.3. Progress of Tunnel Lighting Strategies
2.3.1. Characteristics of Visual Adaption in Highway Tunnels
Light and Dark Adaption
Driver Adaption in Daytime and Nighttime
Restriction of Glare and Flicker Effect
- (1)
- Unreasonable design of the tunnel lighting, for example, improper location and angle of the lighting fixtures.
- (2)
- Reflected light from a mirror or reflective material on the side wall.
- (3)
- Strong intensity of the active luminous sign profile, especially in the tunnel curve section.
- (4)
- Direct sunlight from the tunnel exit.
- (5)
- Dense vehicle exhaust fumes illuminated by high-power lights.
- (6)
- Sudden increase in the luminance level when approaching the tunnel exit.
- (1)
- Reasonable tunnel orientation to avoid direct sunlight from the tunnel exit.
- (2)
- Similar color temperature in interior zone and outside tunnel.
- (3)
- All enhanced lighting fixtures switched off at nighttime.
- (4)
- Use of tunnel portals with lower reflectivity.
- (5)
- Dark material used for pavement inside tunnel.
- (6)
- Dark material paving at least one stopping distance in the access zone and parting zone.
- (7)
- Vegetation or shrubs planted around the tunnel portals.
- (8)
- Buildup of anti-glare structures, such as shading shed or shading panel, etc.
- (1)
- Number of luminance changes per second (flicker frequency).
- (2)
- Duration of this flicker effect.
- (3)
- Ratio of peak luminance to trough luminance.
2.3.2. Existing Lighting Strategies on Luminance Level
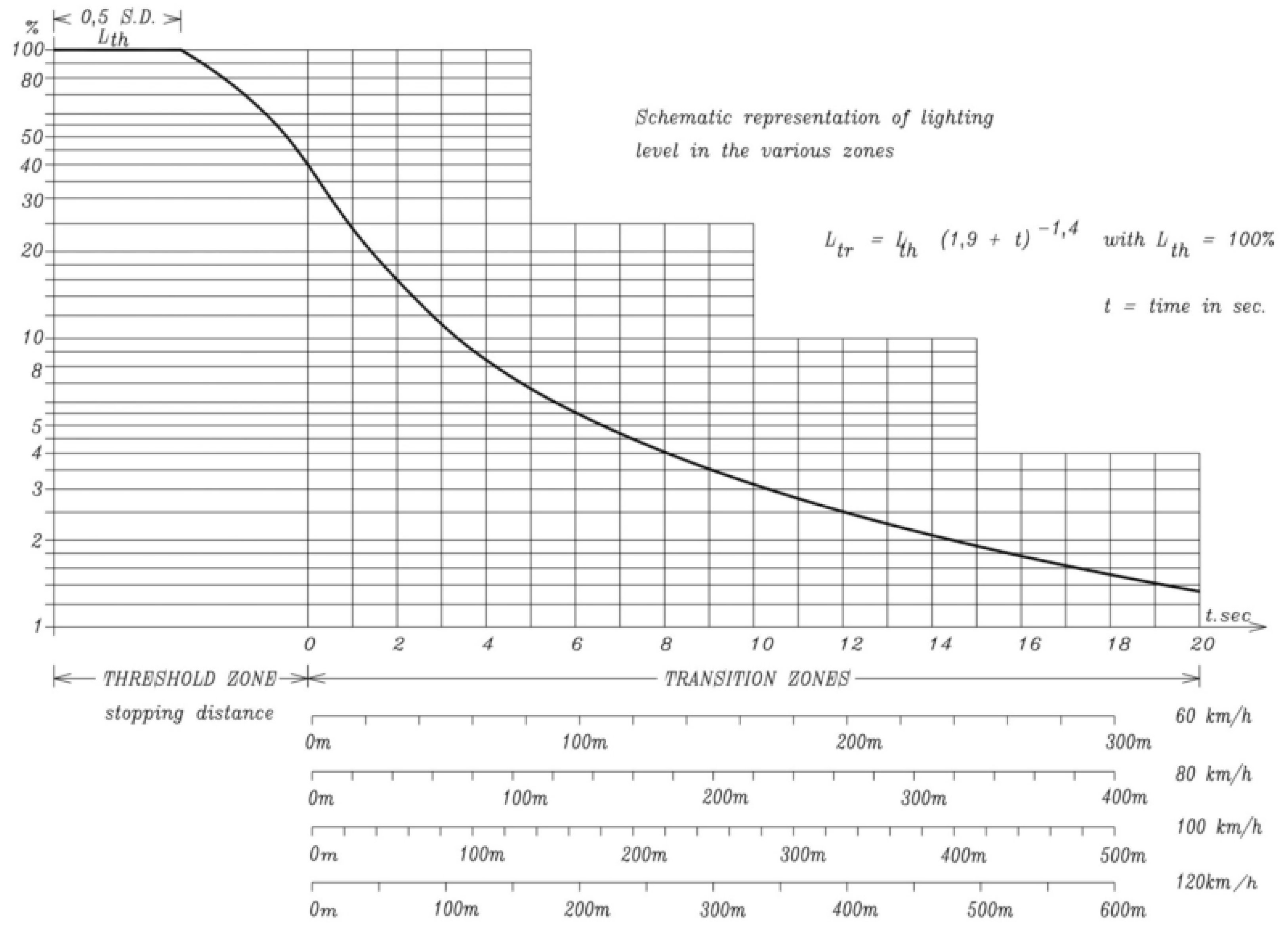
CIE Visual Adaptation Curve and Reduction in Luminance Level
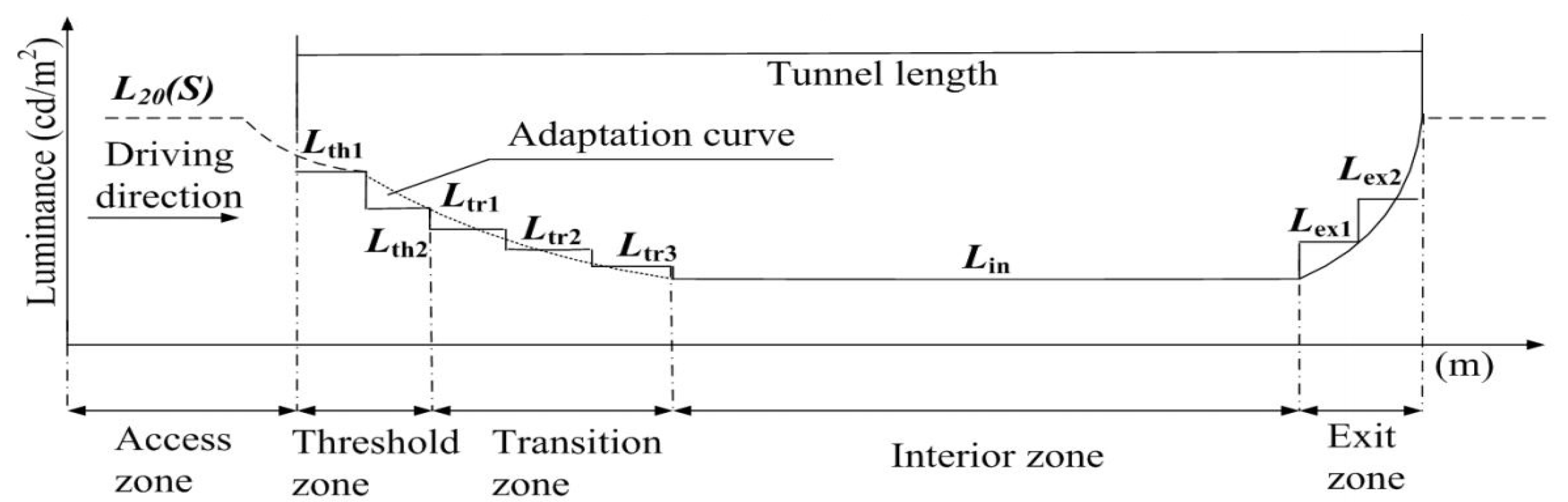
Chinese Guidelines for Tunnel Lighting and Segments of Lighting Area
- (1).
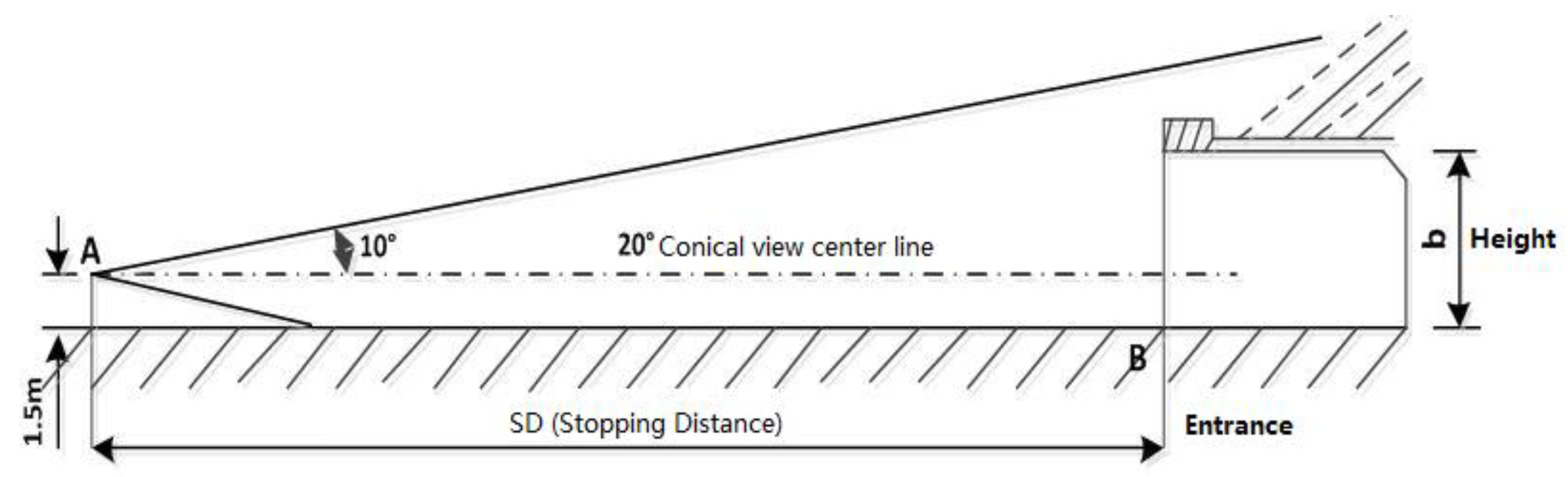
- Daytime, threshold zone: luminance level and length.
- (2).
- Daytime, transition zone: luminance level and length are defined in Table 3.
- (3).
- (4).
- Daytime, exit zone: luminance level and length are defined in Table 6.
- (5).
- Nighttime, access or parting zone, luminance level and length.
- (6).
- Nighttime, inside tunnel, luminance level and length.
2.4. Progress of Tunnel Lighting Control System
2.5. Influences of Color Temperature on Driver Behavior
2.5.1. Necessity of Considering the Influences of Color Temperature
- (1)
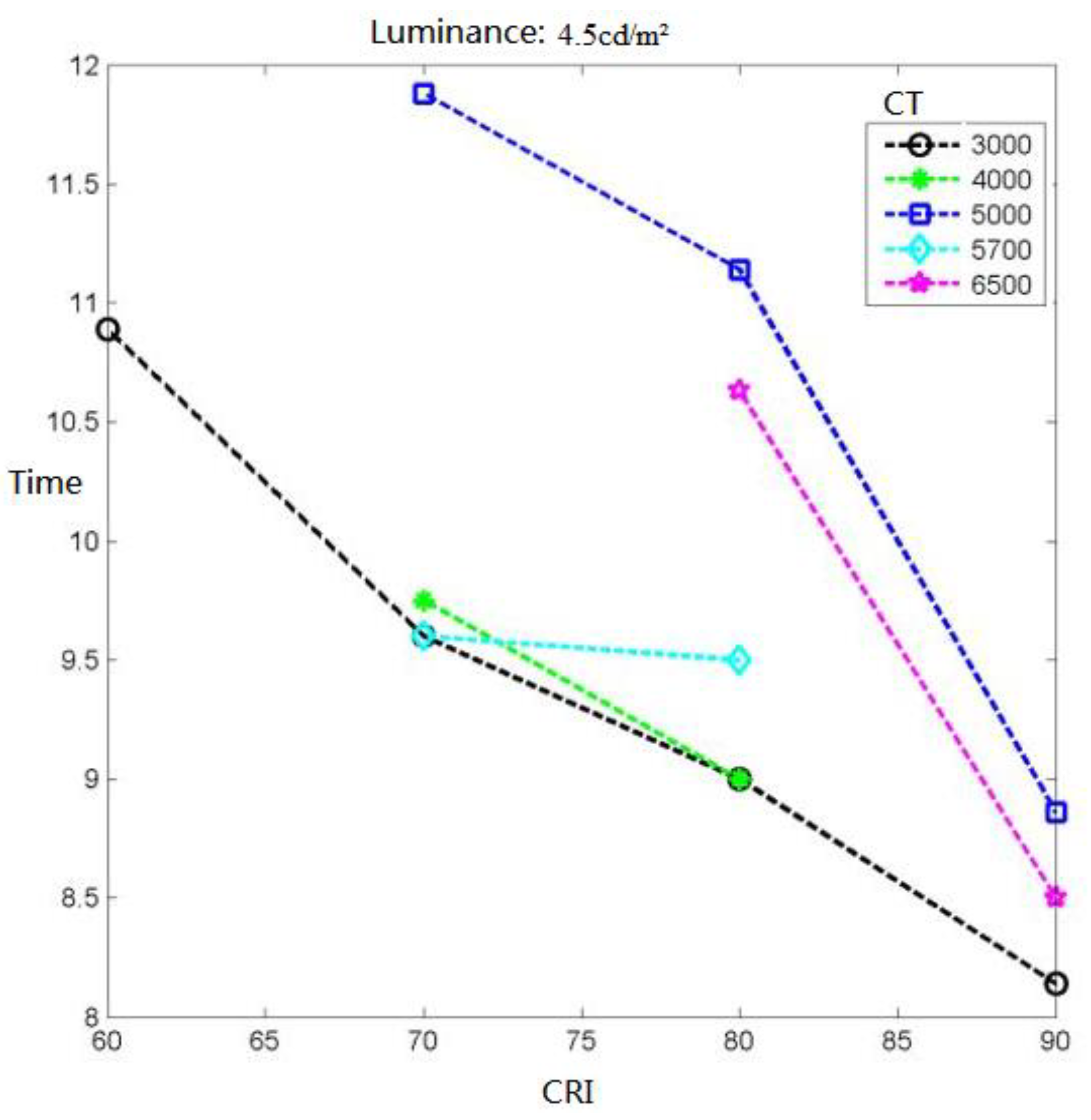
- With the increase in luminance level and CRI of light sources, driver visual performance relating to target objects is improved, which proves that in practical engineering it is an effective energy-saving method to enhance the CRI of light sources, increasing visual visibility without increasing the power of the light sources.
- (2)
- Given a certain luminance level, yellow light sources with low color temperature 3000~4000 K help to increase the photochromic contrast between target objects and background more than white light sources with high color temperature 5000~6500 K. To some degree, this enhances driver visual acuity and visual performance, and eventually contributes to recognizing target objects more easily.
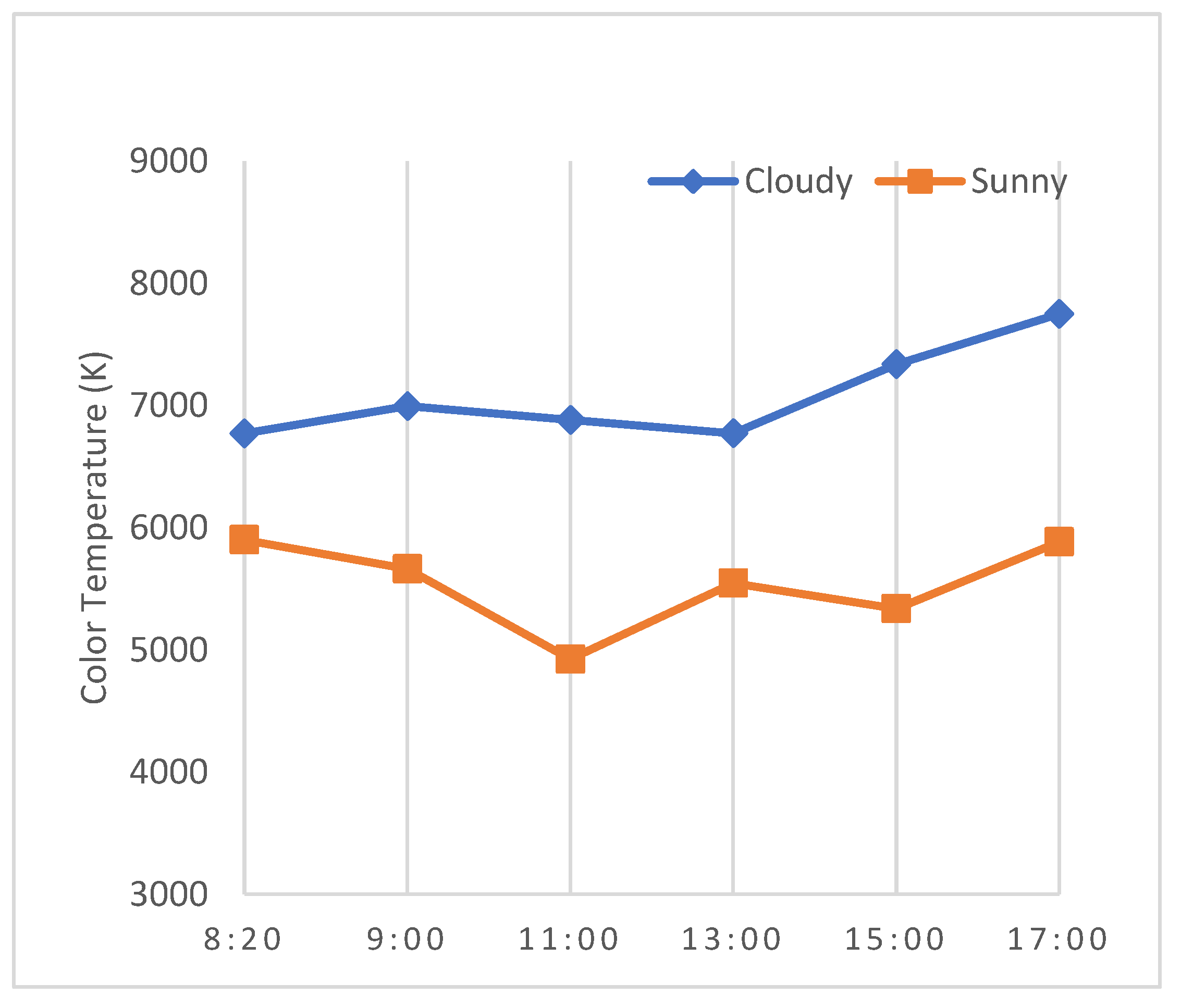
2.5.2. Measurement of Outside Color Temperature
3. Reliability of Tunnel Lighting System
3.1. Definition and Objectives of Reliability
3.2. Main Problems of Existing Tunnel Lighting Modes
- Some modes pay too much attention to saving energy.
- Some modes take less care in handling equipment failures.
- In most cases, tunnel operation relies heavily on the field experience of the operation manager without sufficient theoretical support.
- In most cases, inadequate attention is paid to monitoring whether the inside lighting adjustment is accurately performing as the preset dimming strategy expects.
- There is still insufficient emphasis on the reliability of lighting systems.
3.3. Dilemma to Balance Reliability and Sustainability
3.4. Reliability Evaluation of Tunnel Lighting System
- Hybrid series–parallel system: assume that the system is n level in series, and each level is j level in parallel,
- Hybrid parallel–series system: assume that the system is m level in parallel, and each stage is j level in series,
3.5. Reliability Model Created in This Research
4. Theoretical Basis for ANNs to Improve Lighting System Reliability
4.1. Brief of ANNs
4.2. Feasibility of Lighting Control Aided by ANNs
4.3. Parametric Characteristics of Tunnel Lighting System
5. Model Training of Tunnel Lighting ANN
5.1. Process of Model Training
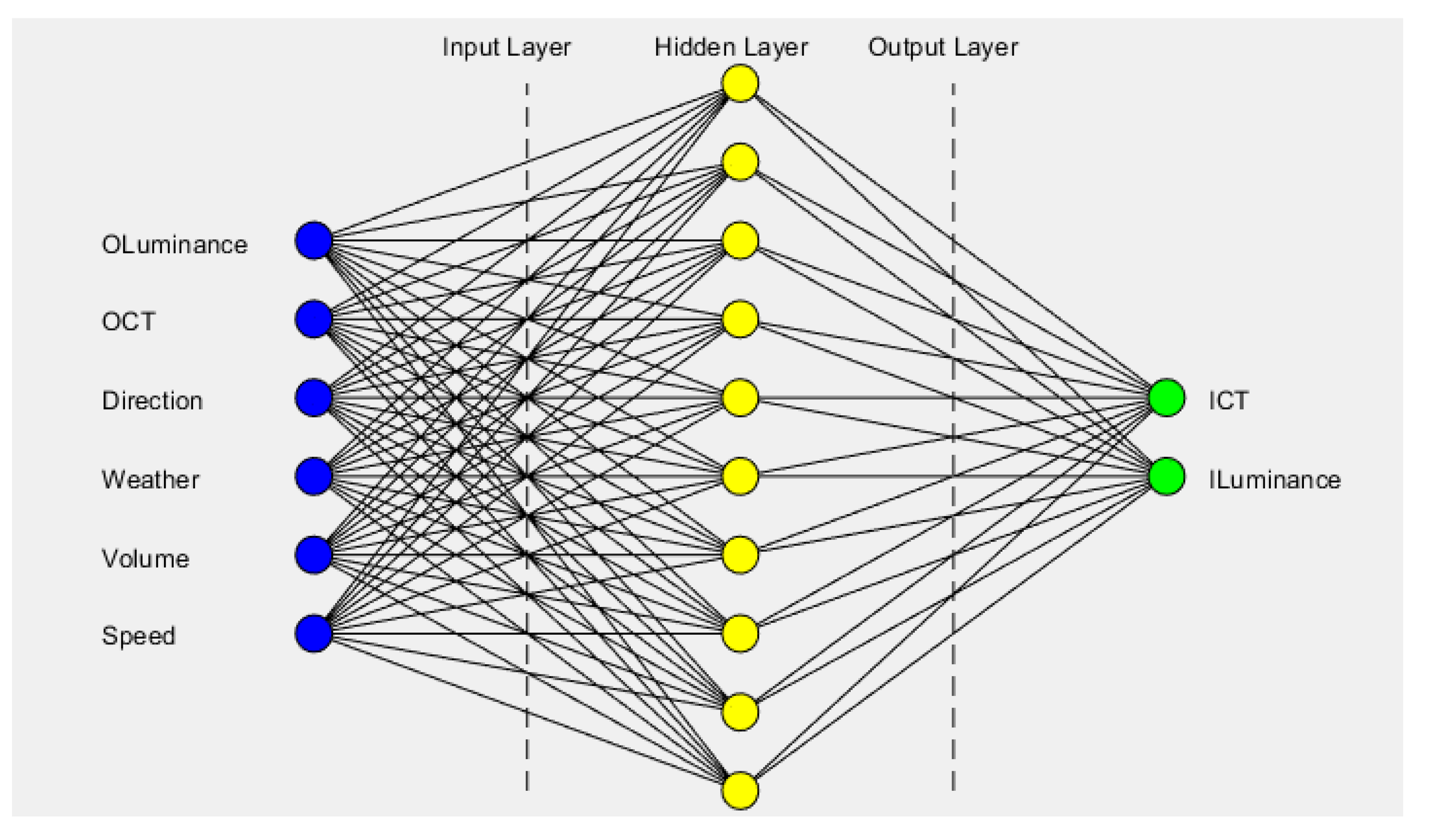
5.1.1. Model Simplifying and Parameters Preprocessing
- Six input-layer parameters and two output-layer parameters are distributed in a wide range without uniform units.
- Both input- and output-layer parameters are mixed types of discrete and continuous parameters.
- Various parameter types and numerical ranges have an unbalanced influence on the link weights of network neurons and often cause the jitter of training process.
- Direction is determined, either unidirectional or bidirectional.
- Design traffic volume is determined.
- Design speed is determined.
- The target lighting parameters do not fluctuate obviously under the influence of the three above parameters, but are deeply affected by real-time weather, OCT and O Luminance.
5.1.2. Training Experiments
- (1)
- After one-hot processing, input and output parameters are both transformed into 3-degree data.
- (2)
- Before training starts, 2000 data labels are divided into 1500 training sets, 300 test sets, and 200 validation sets.
- (3)
- When training with Matlab, a neural network is created with the following statement:
- (4)
- Training parameters are set as in Table 16.
- (5)
- (1)
- When the number of hidden layers (depth) is extended, with increase in this number, network regression result and fitting degree of luminance and color temperature are basically similar, with no significant changes, but they can all meet the fitting target of color temperature and luminance (R > 0.995).
- (2)
- When the dimension of hidden layer is extended (1 hidden layer is maintained), the regression change is not obvious when the number of neurons is greater than five (both are greater than 0.995). However, when the number of neurons is 10, the fitting degree of luminance and color temperature is better than that when the number of neurons is 5 or 20. Especially in the case of low luminance label, the deviation degree of fitting is better than the other two cases.
- (3)
- In the two tests, the fitting between the actual luminance of the lighting system and the predicted value of the trained neural network basically meets the following function (Equation (14)), that is, the predicted and actual values basically conform to unary linear regression with only slight deviations for a and b.
- (4)
- Both tests achieved a 100% recognition rate for color temperature.
5.1.3. Training Results
5.2. Simulation Analysis
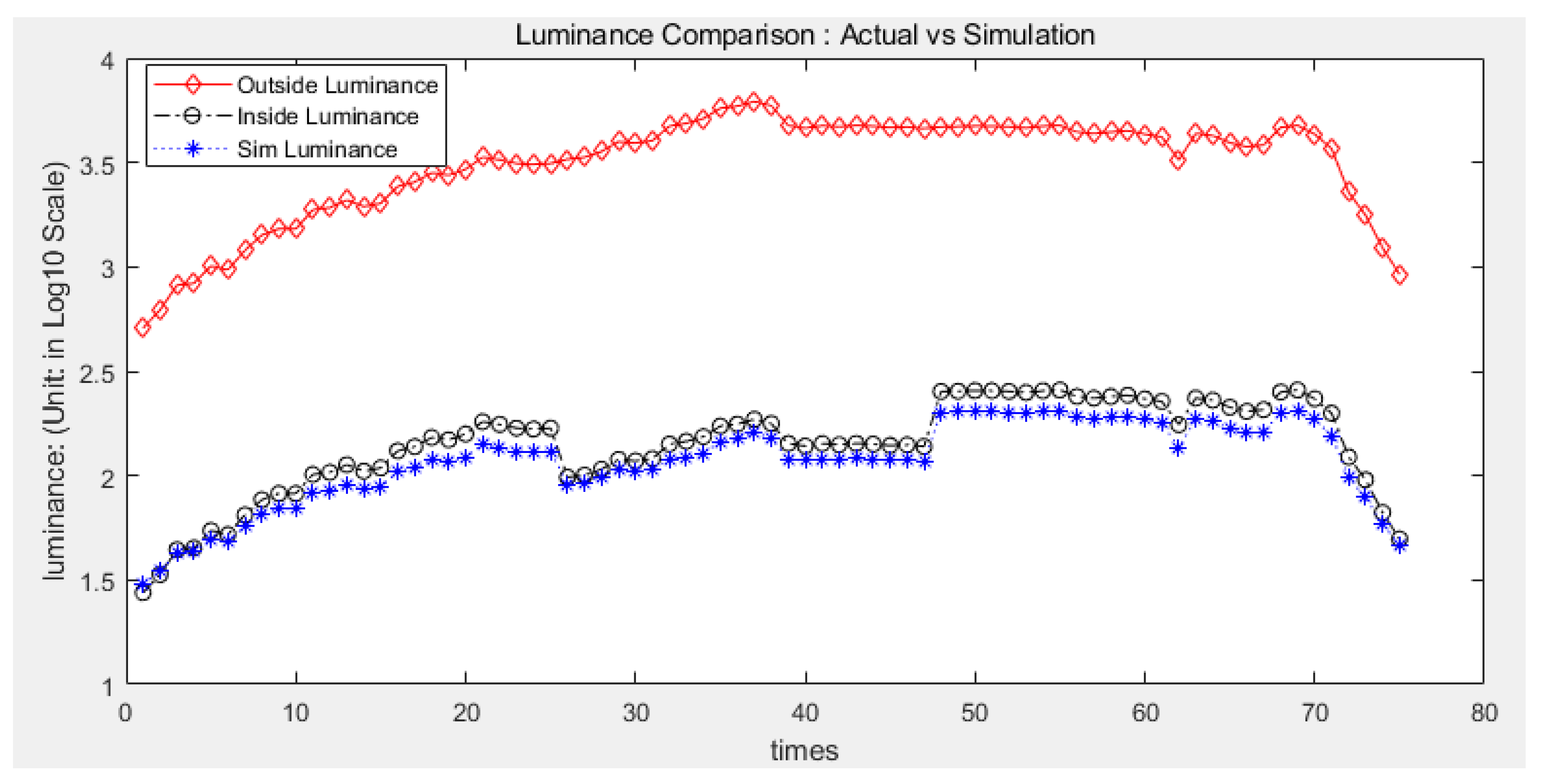
5.2.1. Simulation of Inside Luminance
- (1)
- The prediction of this training model is basically consistent with the regulation of the actual lighting system with a high degree of fit.
- (2)
- The prediction curve of this training model is comparatively flatter than that of the actual lighting system, which effectively weakens the luminance jitter at the moment of dimming.
- (3)
- Except for the dimming moments when outside illuminations are fairly low, the predicted values of this training model are lower than the actual outputs of this lighting control system, which helps to achieve a smooth transition between dimming moments and indirectly reduce the energy consumption.
- (4)
- Actual and simulation luminance curves shift slightly at the moment when color temperature transitions between 6000 K and 3500 K; this is because different L20 luminance reduction coefficients are assigned in the actual lighting strategy to make up for color temperature fluctuation in the daytime under normal weather conditions. Meanwhile, since the target lighting parameters are possibly adjusted in multiple steps, a large gradient change in luminance or color temperature is subdivided into several time slices with smaller granularity in each regulation period, which effectively weakens the harm to visual comfort that large gradient luminance or color temperature jitter may cause.
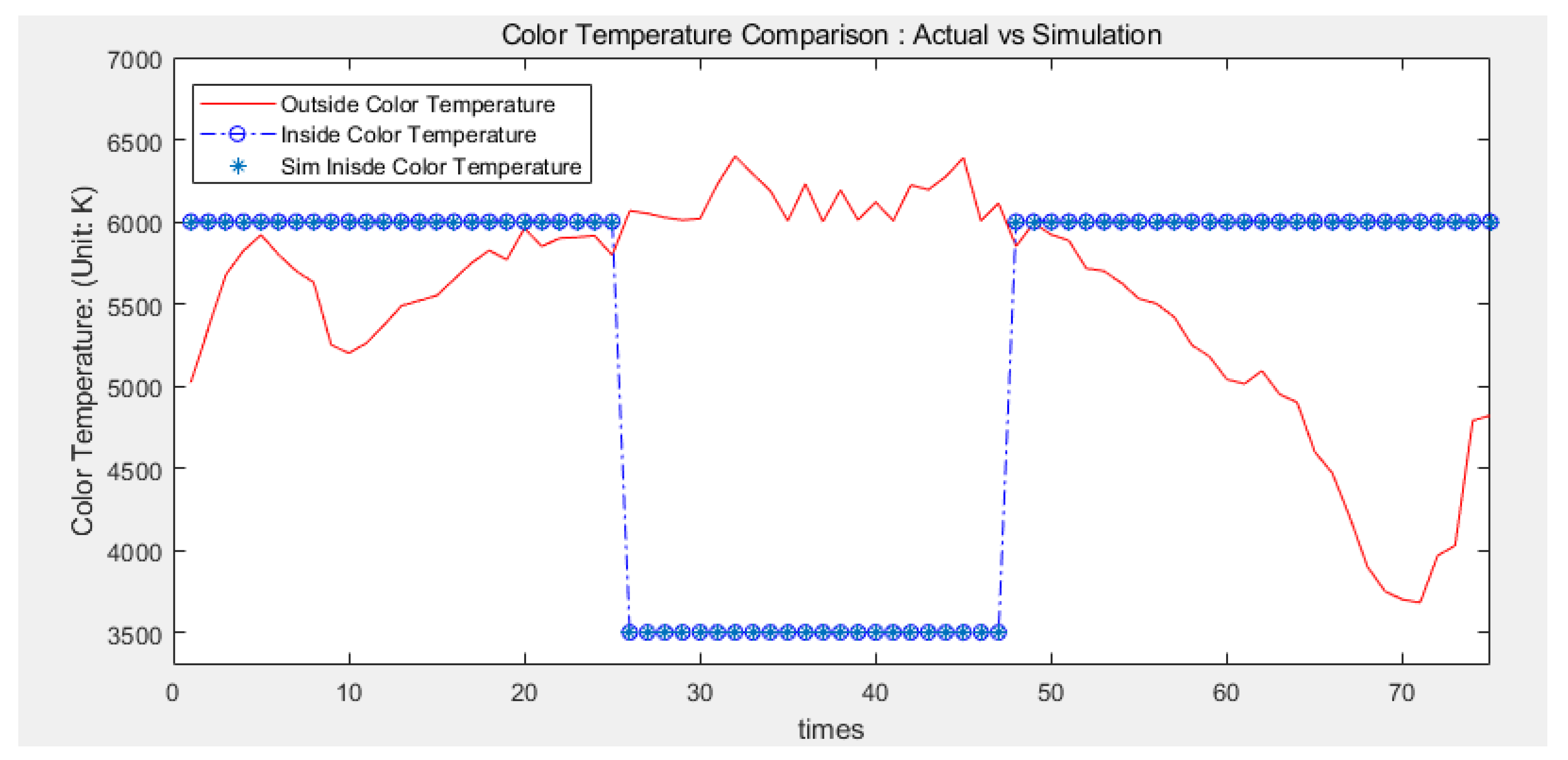
5.2.2. Simulation of inside color temperature
- (1)
- Actual inside color temperature of the threshold zone is 100% consistent with the prediction of the training model, that is, the color temperature classifier has a 100% recognition rate.
- (2)
- In this variable color temperature lighting regulation strategy, the color temperature of the threshold zone only switches among limited enumerated values (3500 K and 6000 K). If the actual color temperature needs to be changed (for instance, from 3500 K to 4000 K), the corresponding network model can be trained and switched instantly.
- (3)
- With the co-training process of color temperature recognition as a discrete parameter and luminance fitting as a continuous parameter, color temperature classification recognition and luminance fitting maintain relative independence and have no adverse impact on each other.
- (4)
- Color temperature transitions twice between 6000 K and 3500 K, 3500 K lasts roughly for the midday duration. During this time window, drivers are prone to struggle with visual fatigue; this transition of color temperature between the threshold zone and open space greatly helps to stimulate drivers’ excitement and make them concentrate on driving carefully, keeping the driving process safe and smooth in the tunnel area.
6. Discussion
6.1. Evaluation of This Network Model
6.2. Application of This Network Model
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ministry of Transport PRC. Statistics Report of Transportation in China. 2022. Available online: https://xxgk.mot.gov.cn/2020/jigou/zhghs/202205/t20220524_3656659.html (accessed on 25 May 2022).
- 2019 Road Traffic Accident Statistical Annual Report of the People’s Republic of China; Traffic Management Bureau of the Ministry of Public Security: Beijing, China, 2020.
- Zhang, X.Q.; Hu, J.B. Analysis of theory for highway tunnel lighting set and evaluation method situation. Highway 2016, 61, 5. [Google Scholar]
- Pervez, A.; Huang, H.; Han, C.; Wang, J.; Li, Y. Revisiting freeway single tunnel crash characteristics analysis: A six-zone analytic approach. Accid. Anal. Prev. 2020, 142, 105542. [Google Scholar] [CrossRef]
- Shy, B. Overview of traffic safety aspects and design in road tunnels. IATSS Res. 2016, 40, 35–46. [Google Scholar]
- From Torches to LED Fixtures, Explore the History and Future of Tunnel Lighting. Available online: https://www.sohu.com/a/166463858_139987 (accessed on 22 August 2017).
- Tan, K.Z.; Lee, S.K.; Low, H.C. LED Lifetime Prediction Under Thermal-Electrical Stress. IEEE Trans. Device Mater. Reliab. 2021, 21, 310–319. [Google Scholar] [CrossRef]
- Kyak, S.; Gkmen, G.; Koyiit, G. Lifetime Prediction for a Cell-on-Board (COB) Light Source Based on the Adaptive Neuro-Fuzzy Inference System (ANFIS). J. Nanomater. 2021, 2021, 6681335. [Google Scholar] [CrossRef]
- Bertin, K.; Canale, L.; Ben Abdellah, O.; Méquignon, M.-A.; Zissis, G. Life Cycle Assessment of Lighting Systems and Light Loss Factor: A Case Study for Indoor Workplaces in France. Electronics 2019, 8, 1278. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Hu, J.; Wang, R.; Gao, X.; He, L. The comprehensive efficiency analysis of tunnel lighting based on visual performance. Adv. Mech. Eng. 2017, 9, 1687814017696449. [Google Scholar] [CrossRef] [Green Version]
- CIE Technical Committee. Guide for the Lighting of Road Tunnels and Underpasses, 2nd ed.; CIE Technical Committee: Vienna, Austria, 2004. [Google Scholar]
- JTG/TD70/2-01-2014; Guidelines for Design of Lighting of Highway Tunnels. Communications Press Co., Ltd.: Beijing, China, 2014.
- Su, B.; Hu, J.; Zeng, J.; Wang, R. Traffic Safety Improvement via Optimizing Light Environment in Highway Tunnels. Int. J. Environ. Res. Public Health 2022, 19, 8517. [Google Scholar] [CrossRef]
- Van Winsum, W. The Effects of Cognitive and Visual Workload on Peripheral Detection in the Detection Response Task. Hum. Factors 2018, 61, 992–1003. [Google Scholar] [CrossRef]
- Roy Choudhury, A.K. Principles of Colour and Appearance Measurement. 2015. Available online: https://www.sciencedirect.com/topics/engineering/light-adaptation (accessed on 30 November 2022).
- Liu, C.; Wang, Q. Research on Light-Dark Adaptation of Human Vision in Tunnel Portals. Mapp. Intimacies 2021. ahead of print. [Google Scholar] [CrossRef]
- Reyes, M.A.; Gallagher, S.; Sammarco, J.J. Evaluation of Visual Performance When Using Incandescent, Fluorescent, and LED Machine Lights in Mesopic Conditions. IEEE Trans. Ind. Appl. 2013, 49, 1992–1999. [Google Scholar] [CrossRef]
- Qin, L.; Dong, L.; Xu, W.; Zhang, L.; Leon, A.S. An Intelligent Luminance Control Method for Tunnel Lighting Based on Traffic Volume. Sustainability 2017, 9, 2208. [Google Scholar] [CrossRef]
- Guo, Y.W.; Fu, D.X. Research on comprehensive energy saving technology of ventilation and lighting linkage in highway tunnel. Build. Energy Conserv. 2018, 45, 4. [Google Scholar]
- Wang, Y.; Qin, H.B.; Hu, Y.Z. Design of tunnel color temperature lighting control system. Softw. Guide 2018, 17, 157–161. [Google Scholar]
- Du, J.; Zhou, S.K.; Chen, C.G. LED lighting technology of Hong Kong-Zhuhai-Macao Bridge lighting project. Zhaoming Gongcheng Xuebao 2020, 31, 11. [Google Scholar]
- Zhang, Y.; Li, S. Study on Illumination Measurement Method of Lighting Environment Based on RBF Neural Network. J. Phys. Conf. Ser. 2022, 2196, 012004. [Google Scholar] [CrossRef]
- Li, Z.; Liu, W.; Du, Y.; Xu, S. Design of Underground Tunnel Monitoring System Based on CAN BUS Local Area Network. In Proceedings of the 2021 4th World Conference on Mechanical Engineering and Intelligent Manufacturing (WCMEIM), Shanghai, China, 12–14 November 2021; pp. 613–617. [Google Scholar]
- Doulos, L.T.; Sioutis, I.; Tsangrassoulis, A.; Canale, L.; Faidas, K. Revision of Threshold Luminance Levels in Tunnels Aiming to Minimize Energy Consumption at No Cost: Methodology and Case Studies. Energies 2020, 13, 1707. [Google Scholar] [CrossRef] [Green Version]
- Edward, I.A.; Mok, W.Y. Enhancement of the Lighting and Control System of Aberdeen Tunnel. 2014. Available online: https://www.semanticscholar.org/paper/Enhancement-of-the-Lighting-and-Control-System-of-Edward-Mok/05fa3450a376618dbb30d2bc1358ee098d7e6aba#citing-papers (accessed on 20 June 2021).
- Yamamoto, J.; Kobayashi, S.; Nagasawa, T.; Ito, H. Visibility and color-rendering properties of Light sources in tunnel lighting. In Proceedings of the 26th Session of CIE (Volume 2), Beijing, China, 4–11 July 2007. [Google Scholar]
- Yasukouchi, A.; Ishibashi, K. Non-visual Effects of the Color Temperature of Fluorescent Lamps on Physiological Aspects in Humans. J. Physiol. Anthropol. Appl. Hum. Sci. 2005, 24, 41–43. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z. Study on Road Lighting Safety with Citopic. China Illum. Eng. J. 2007, 18, 31–34. [Google Scholar]
- Berman, S.M.; Clear, R.D. Past vision studies can support a novel human photoreceptor. Light Eng. 2008, 16, 88–94. [Google Scholar]
- Navvab, M. Visual Acuity Depends on the Color Temperature of the Surround Lighting. LEUKOS J. Illum. Eng. Soc. N. Am. 2002, 31, 70–84. [Google Scholar] [CrossRef]
- Putcha, C.; Dutta, S.; Gupta, S.K. System Reliability. In Reliability and Risk Analysis in Engineering and Medicine (Transactions on Computational Science and Computational Intelligence); Springer: Cham, Switzerland, 2021. [Google Scholar] [CrossRef]
- Peña-García, A. Sustainable tunnel lighting: One decade of proposals, advances and open points. Tunn. Undergr. Space Technol. 2022, 119, 104227. [Google Scholar] [CrossRef]
- Park, Y.-S.; Lek, S. Chapter 7-Artificial Neural Networks: Multilayer Perceptron for Ecological Modeling. In Developments in Environmental Modelling; Elsevier: Amsterdam, The Netherlands, 2016; Volume 28, pp. 123–140. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 2012 | 2013 | 2014 | 2015 | 2016 | 2017 | 2018 | 2019 | 2020 | 2021 | |
|---|---|---|---|---|---|---|---|---|---|---|
| Total | 10,022 | 11,359 | 12,404 | 14,006 | 15,181 | 16,229 | 17,738 | 19,067 | 21,316 | 23,268 |
| Long | 1944 | 2303 | 2623 | 3138 | 3520 | 3841 | 4315 | 4784 | 5541 | 6211 |
| Extra-long | 441 | 562 | 626 | 744 | 815 | 902 | 1058 | 1175 | 1394 | 1599 |
| Construction Cost | For long tunnels, long-distance power supply, cables, and tunnel lights account for a particularly large ratio of the construction cost of the light distribution system. Use of LED lights can greatly reduce the investment in cables and power distribution facilities. |
| Energy Consumption | LED lights consume 40% less energy than HPSL. |
| Lifespan 1 | Lifespan of LED lights is about 40,000–70,000 H [7,8,9] under ideal conditions, this is longer than HPSL or fluorescent light sources. |
| Maintenance | LED tunnel lights have low daily maintenance costs whose separate ballasts can be replaced independently. |
| Color Rendering | High color rendering index (CRI). Excellent reproduction of photochromic properties. |
| Adjustment | Easy adjustment with wide range, (1). Color temperature (3000–6500 K) and illuminance dimming (0~100%). (2). Step-less mode for color temperature or luminance adjustment. |
| Utilization Factor | Directional luminescence. More than 85% of the luminous flux reaches the ground. |
| Others | Instant startup and restart. High operational reliability. More environmentally friendly than other light sources in use phase [9], pollutant-free (mercury, lead, halogen, etc.). |
| Zone | TR1 | TR2 | TR3 |
|---|---|---|---|
| Luminance 1 | Ltr1 = 0.15 Lth1 | Ltr2 = 0.05 Lth1 | Ltr3 = 0.02 Lth1 |
| Luminance 2 | Ltr1 = 0.30 Lth | Ltr2 = 0.10 Lth | Ltr3 = 0.035 Lth |
| Zone length | Dtr1 = (Dth1+ Dth2)/3 + Vt/1.8 | Dtr2 = 2 Vt/1.8 | Dtr3 = 3 Vt/1.8 |
| Design Speed (km/h) | Lin (cd/m2) | ||
|---|---|---|---|
| Traffic Flow (N): One Way [veh/(h·ln)] | |||
| N ≥ 1200 | 350 < N < 1200 | N ≤ 350 | |
| Traffic Flow: Two Way [veh/(h·ln)] | |||
| N ≥ 650 | 180 < N < 1200 | N ≤ 180 | |
| 120 | 10.0 | 6.0 | 4.5 |
| 100 | 6.5 | 4.5 | 3.0 |
| 80 | 3.5 | 2.5 | 1.5 |
| 60 | 2.0 | 1.5 | 1.0 |
| 20~40 | 1.0 | 1.0 | 1.0 |
| Length (m) | Luminance (cd/m2) | |
|---|---|---|
| 1st part of interior | Din1: driving distance in 30 s. | Lin1= Lin |
| 2nd part of interior | Din2: total interior minus Din1. | 0.5 Lin ≤ Lin2 ≤ 0.8 Lin, and Lin2 > 1.0 |
| Zone | EX1 | EX2 |
|---|---|---|
| Luminance | Lex1 = 3 Lin | Lex2 = 5 Lin |
| Length | 30 m | 30 m |
| Location | Speed (km/h) | Distance | Luminance (cd/m2) | |
|---|---|---|---|---|
| CIE | parting zone | - | over 2 SDs | Lin/3 |
| UK | access zone, parting zone | - | over 1 SD | ≥1.0 |
| USA | access zone, parting zone | - | over 1 SD | Lin/3 |
| CHINA | access zone, parting zone | 120 | 240 | 2.0 < L ≤ 3.9 |
| 100 | 180 | 2.0 < L ≤ 3.9 | ||
| 80 | 130 | 1.0 < L ≤ 3.9 | ||
| 60 | 95 | 0.5 < L ≤ 3.9 |
| Design speed (km/h) | 60 | 80 | 100 | 120 |
| Luminance (cd/m2) | 33 | 33 | 53 | 59 |
| location | Speed (km/h) | Tunnel Length (m) or Traffic Flow [veh/(h·ln) | Luminance (cd/m2) | |
|---|---|---|---|---|
| CIE | threshold zone transition zone interior zone exit zone | - | ≥1.0 | |
| CEN | - | N ≥ 1500 | ≥2.0 | |
| - | 500 ≤ N < 1500 | ≥1.0 | ||
| UK | - | L > 200 m | ≥1.0 | |
| USA | - | - | 2.5 | |
| CHINA | 120 | - | 4.51 | |
| 100 | - | 3.18 | ||
| 80 | - | 1.49 | ||
| 60 | - | 1.09 |
| 1 | Tunnel luminaires provide an ideal solution for extremely corrosive environments. |
| 2 | Increase in visibility for drivers helps to detect potential dangers and enables them to react in advance to guarantee a safe stopping distance. |
| 3 | High performance with high visual comfort at every stage throughout the full life cycle. |
| 4 | Powerful enabler of the complete management of lighting installation. |
| 5 | Precise dimming, switching, data reporting, system monitoring and extremely short commissioning time. |
| 6 | Minimum probability of occurrence of accidents and critical incidents. |
| 7 | Rapid responses to any sudden events inside the tunnel. |
| 8 | Promotion of safety and efficiency while easing operations and reducing costs. |
| 9 | Reduction in tunnel closures and maintenance activities to fully ensure the tunnel experience. |
| 10 | High level of cyber security and communication efficiency to guarantee the safe transmission of critical data. |
| Lighting Mode | Technical Characteristics |
|---|---|
| Fixed | Fixed control policy, takes no care for energy consumption. |
| Time-series-based | Partially flexible control policy with time-series based on natural light statistics rule. Stable lighting mode with slightly lower energy consumption. Hard to track real-time changes in weather or natural light. Poor adaptability to emergencies. |
| Initially intelligent with adjustable luminance | Illumination perception is introduced to help adjust the inside luminance at constant intervals with fixed reduction coefficient. Initially intelligent mode with lowered energy consumption. Unable to meet drivers’ demand for photochromic properties due to lack of perception with outside color temperature and regulation with inside color temperature. |
| Intelligent with variable color temperature and luminance | The three modes above are unable to effectively reflect real-time changes in natural light, and it is hard to satisfy the physiological and psychological demands of tunnel drivers. This mode dynamically adjusts inside color temperature and luminance to track real-time variation of outside color temperature and illuminance. This mode strives to achieve energy saving and effectively improve driving safety and comfort. |
| |
| 1 | Predefined intelligent lighting strategies reside in TSM. |
| 2 | Real-time response to light data from LESC. |
| 3 | Assembly lighting adjustment command. |
| |
| 1 | Driving direction, bidirectional or unidirectional. |
| 2 | Outside weather conditions, normal or abnormal. |
| 3 | Design speed, 40/60/80/100/120 (km/h). |
| 4 | Traffic volume (veh/(h·ln)). |
| 5 | Outside color temperature (K). |
| 6 | Outside luminance (cd/m2). |
| |
| 1 | Target inside color temperature (K). |
| 2 | Target inside luminance (cd/m2). |
| |
| 1 | Step-less mode for color temperature adjustment. |
| 2 | Step-less mode for luminance adjustment. |
| 3 | Each adjustment of color temperature or luminance finishes within 1 s. |
| 4 | Cycle to adjust color temperature or luminance is configurable with default setting of 10 min. |
| 5 | This strategy works for each tunnel lighting zone. |
| 6 | This strategy can be easily switched to stable time sequence control mode. |
| 7 | This strategy can be easily switched to emergency lighting mode. |
| 8 | This strategy can be easily switched to manual control mode. |
| 9 | This strategy differentiates daytime from night automatically. |
| Classification Criteria | Categories |
|---|---|
| Model structure | Feedforward network (multi-layer perceptron network). Feedback network (Hopfield network). |
| Learning mode | Supervised learning. Unsupervised learning. Semi-supervised learning. |
| Working mode | Deterministic neural network. Stochastic neural network. |
| Time characteristics | Continuous neural network. Discrete neural network. |
| Variable | Description | Characteristics | |
|---|---|---|---|
| O Luminance | Outside tunnel light luminance 1 | Generally noted as L20 [12]. Continuous parameter. Range: 0–18,000 [cd/m2]. | |
| OCT | Outside tunnel color temperature 1 | Continuous parameter. Range: 0–20,000 K. | |
| Direction | Driving direction 2 | Discrete parameter. Range: Bidirectional, Unidirectional. | |
| Weather | Weather condition 2 | Discrete parameter. Range: Normal (Sunny, Cloudy). Abnormal (Rainy, Snowy, Foggy). | |
| Volume | Tunnel design hourly traffic volume per lane 2 | Discrete: Several intervals. | |
| Direction | Volume [veh/(h·ln)] | ||
| Unidirectional | ≤350, 350 < N < 1200, ≥1200 | ||
| Bidirectional | ≤180, 180 < N < 650, ≥650 | ||
| Speed | Tunnel design speed 2 | Discrete parameter Range: 40, 60, 80, 100, 120 [km/h] | |
| ICT | Inside target lighting color temperature | Discrete parameter. Range: 3500 K, 4000 K, 6000 K. | |
| I Luminance | Inside target lighting luminance | Continuous parameter. Converted by OCT with reduction coefficient. | |
| Parameter | Preprocessing and Normalization | |||
|---|---|---|---|---|
| Direction | Unidirectional: (0, 6), Bidirectional: (6, 0) | |||
| Volume [veh/(h·ln)] | Direction | Range 1 | Range 2 | Range 3 |
| Unidirectional | ≤350: (0, 0, 2) | 350 < N < 1200: (0, 2, 0) | ≥1200: (2, 0, 0) | |
| Bidirectional | ≤180: (0, 0, 2) | 180 < N < 650: (0, 2, 0) | ≥650: (2, 0, 0) | |
| OCT (K) | 0–6000: (0, 6), >6000: (6, 0) | |||
| O Luminance | Normalized to the range [−10, 10] | |||
| Weather | Normal: (0, 6), Abnormal: (6, 0). | |||
| Speed (km/h) | 40: (00001), 60: (00010), 80: (00100), 100: (01000), 120: (10000). | |||
| ICT (K) | Either 3500/4000: (0, 6) or 6000: (6, 0). | |||
| I Luminance | Normalized to the range [−10, 10]. | |||
| Parameters | Value | Meaning |
|---|---|---|
| net.trainParam.epochs | 5000 | Maximum number of epochs to train |
| net.trainParam.goal | 1 × 10−12 | Performance goal |
| net.trainParam.lr | 0.01 | Learning rate |
| net.trainParam.max_fail | 6 | Maximum validation failures |
| net.trainParam.mc | 0.9 | Momentum constant |
| net.trainParam.showWindow | true | Show training GUI |
| Order | Hidden Layers | Neuron Number in Hidden Layers | Comparison (Regression, Luminance and CT Fitting) |
|---|---|---|---|
| 1 | 1 | 10 | R > 0.996 for training, test and validation sets. Luminance curve fits well, bigger deviation takes place for lower O Luminance labels. CT achieves a 100% recognition rate. |
| 2 | 2 | 10, 10 | Nearly same targets to above. |
| 3 | 3 | 10, 10, 10 | Nearly same targets to above. |
| Order | Hidden Layers | Neuron Number in Hidden Layers | Comparison (Regression, Luminance and CT Fitting) |
|---|---|---|---|
| 1 | 1 | 5 | R > 0.995 for training, test and validation sets. Luminance curve fits well, but bigger deviations take place for several lower O Luminance labels. CT achieves a 100% recognition rate. |
| 2 | 1 | 10 | R > 0.997 for training, test and validation sets. Luminance curve fits well, and bigger deviations take place for lower O Luminance labels than Test-1. CT achieves a 100% recognition rate. |
| 3 | 1 | 20 | R > 0.996 for Training, Test and Validation Sets. Luminance curve fits well, and bigger deviations take place for several lower O Luminance labels, similar to Test-1. CT achieves a 100% recognition rate. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, B.; Hu, J.; Zeng, J.; Wang, R. Reliability Enhancement Driven by ANN for Lighting Control System in Highway Tunnels. Appl. Sci. 2023, 13, 42. https://doi.org/10.3390/app13010042
Su B, Hu J, Zeng J, Wang R. Reliability Enhancement Driven by ANN for Lighting Control System in Highway Tunnels. Applied Sciences. 2023; 13(1):42. https://doi.org/10.3390/app13010042
Chicago/Turabian StyleSu, Baofeng, Jiangbi Hu, Juncheng Zeng, and Ronghua Wang. 2023. "Reliability Enhancement Driven by ANN for Lighting Control System in Highway Tunnels" Applied Sciences 13, no. 1: 42. https://doi.org/10.3390/app13010042