
Research on Magnetic Coupling Flywheel Energy Storage Device for Vehicles


Abstract
:1. Introduction
2. The Structure and Function of the Device
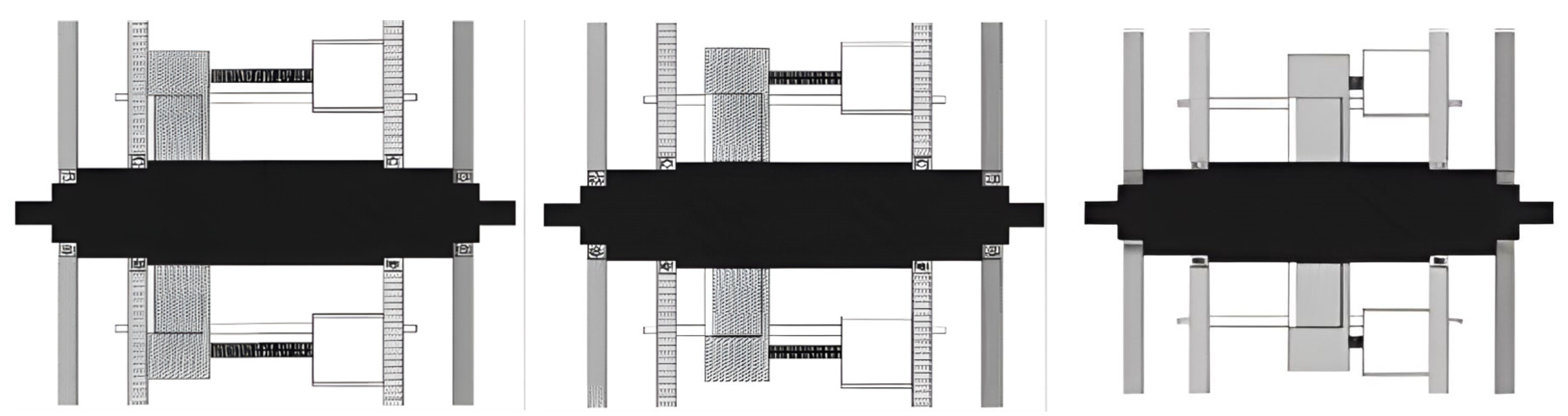
2.1. Structural Features of the Device
2.2. The Working Process of the Device
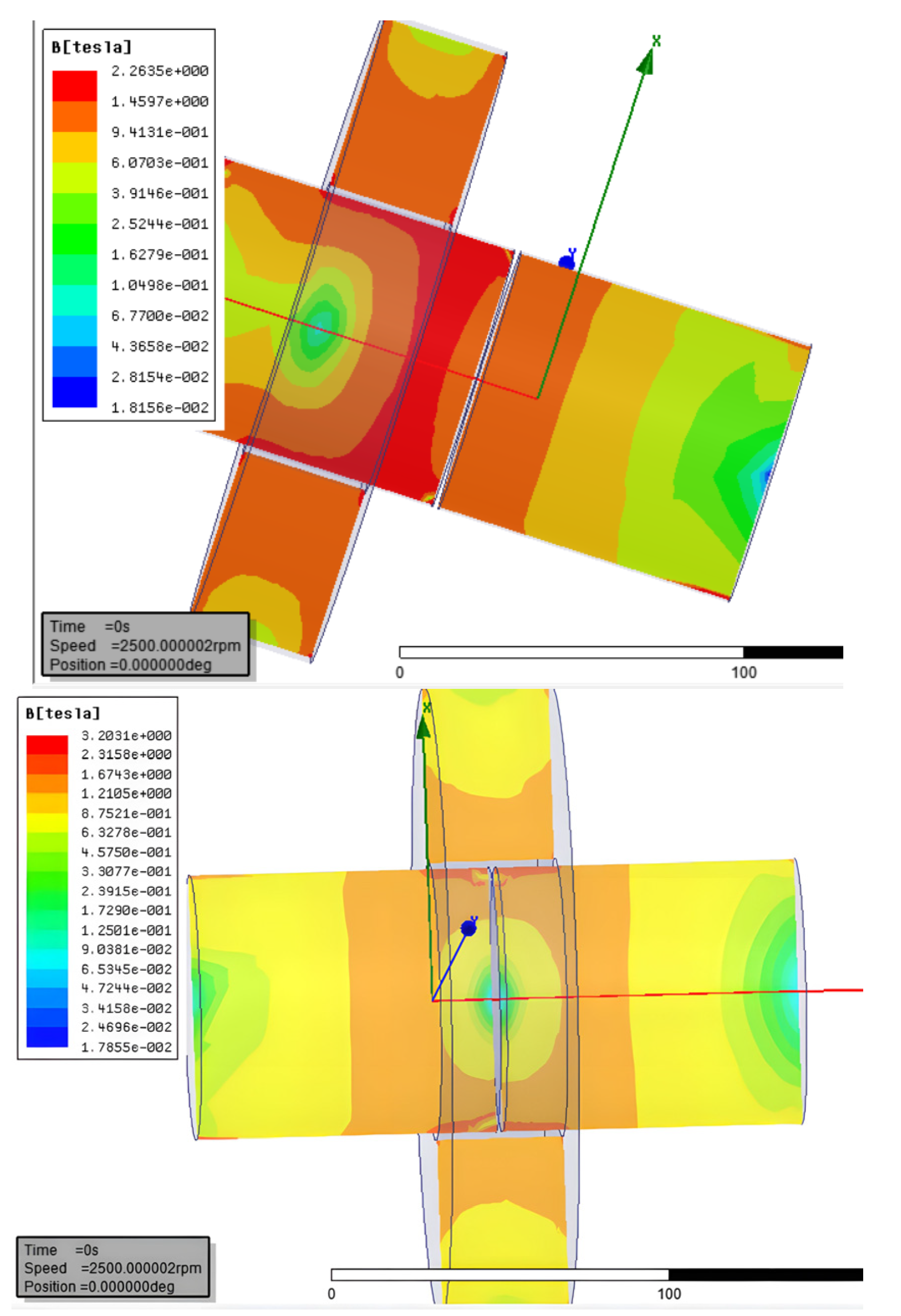
2.3. Simulation Analysis
3. Core Component Performance Test
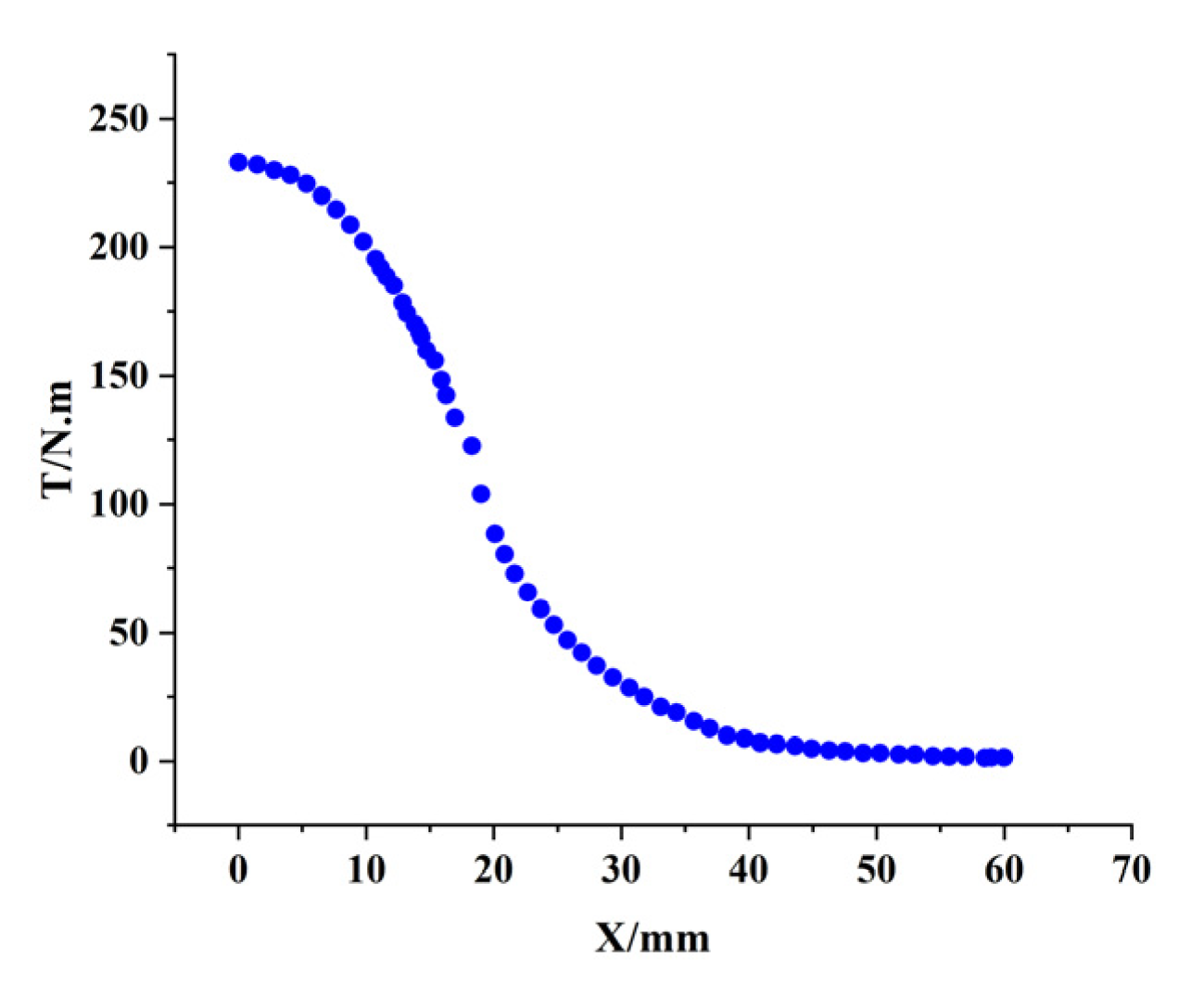
3.1. Transmission Characteristics
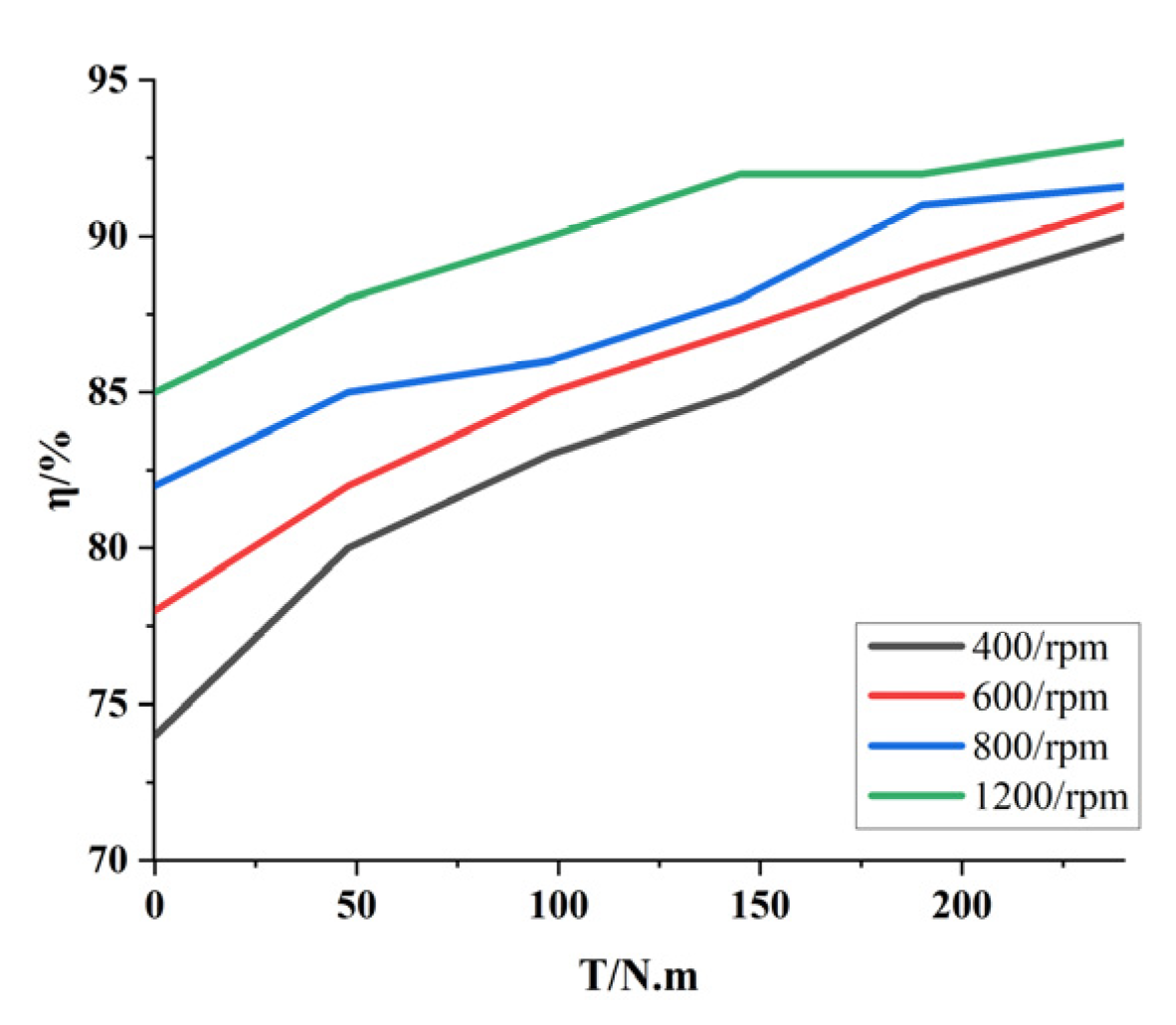
3.2. Efficiency Characteristics
3.3. Error Analysis
4. Principles and Strategies of Energy Recovery
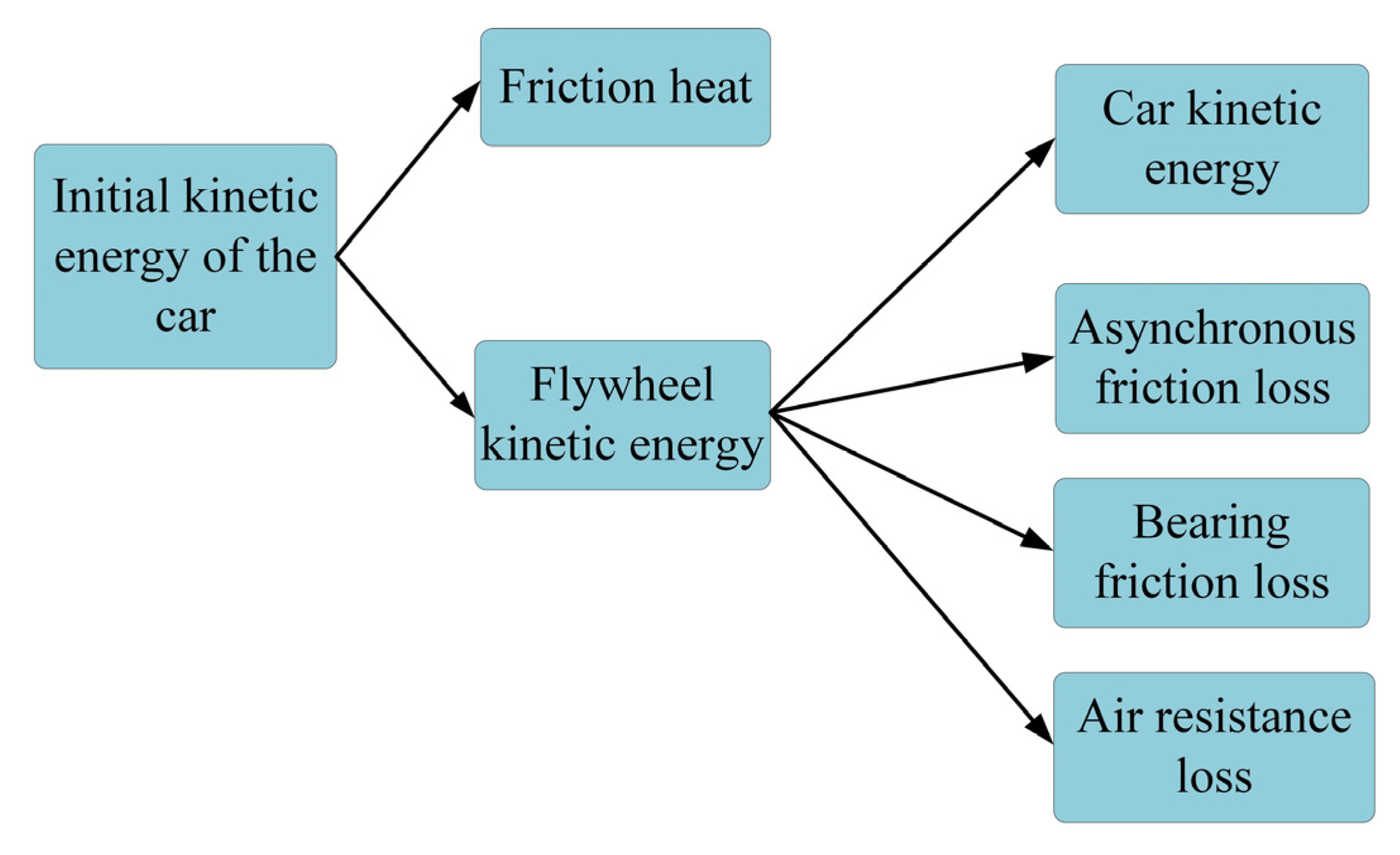
4.1. The Principle of Energy Recovery
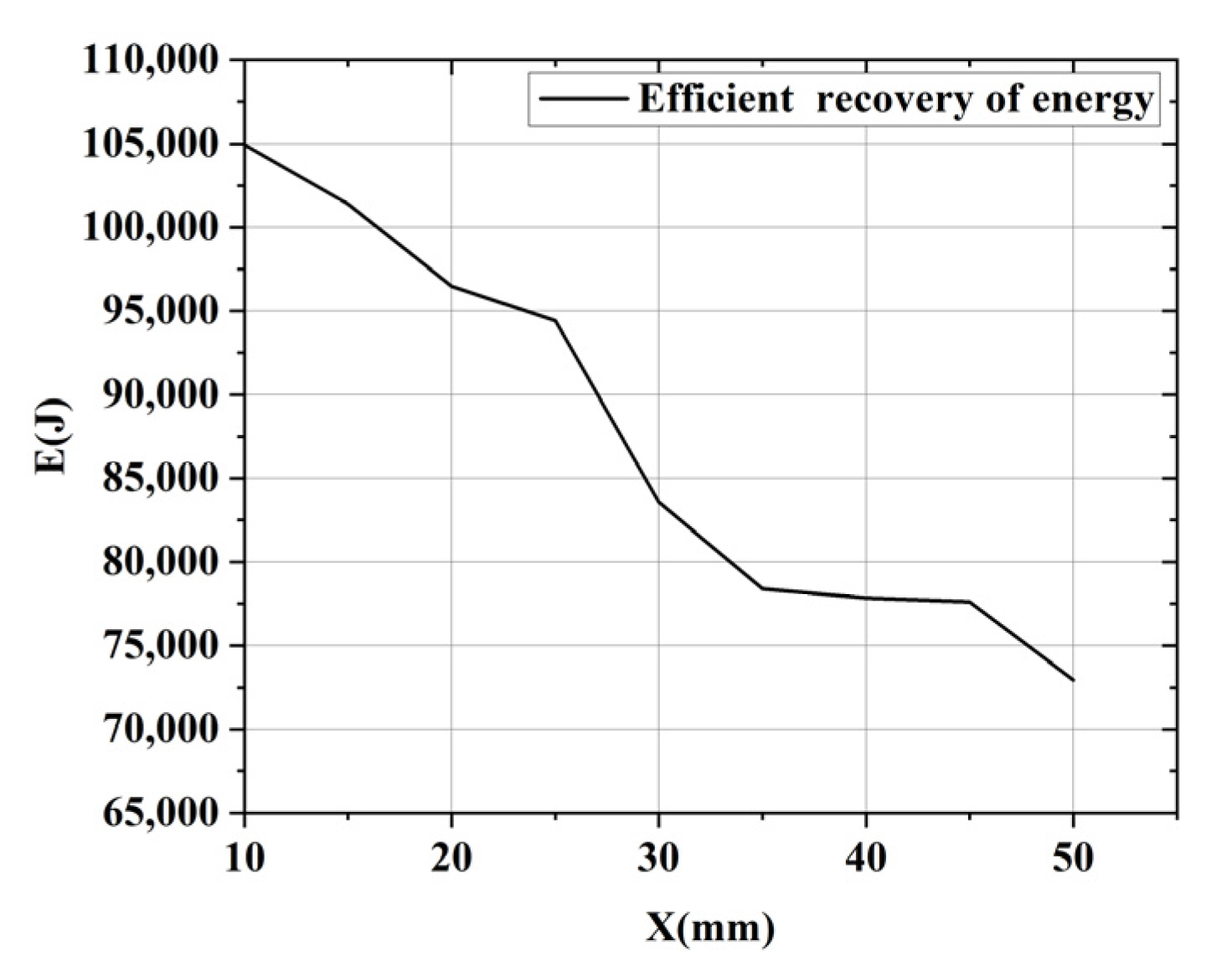
4.2. Efficient Recovery of Energy
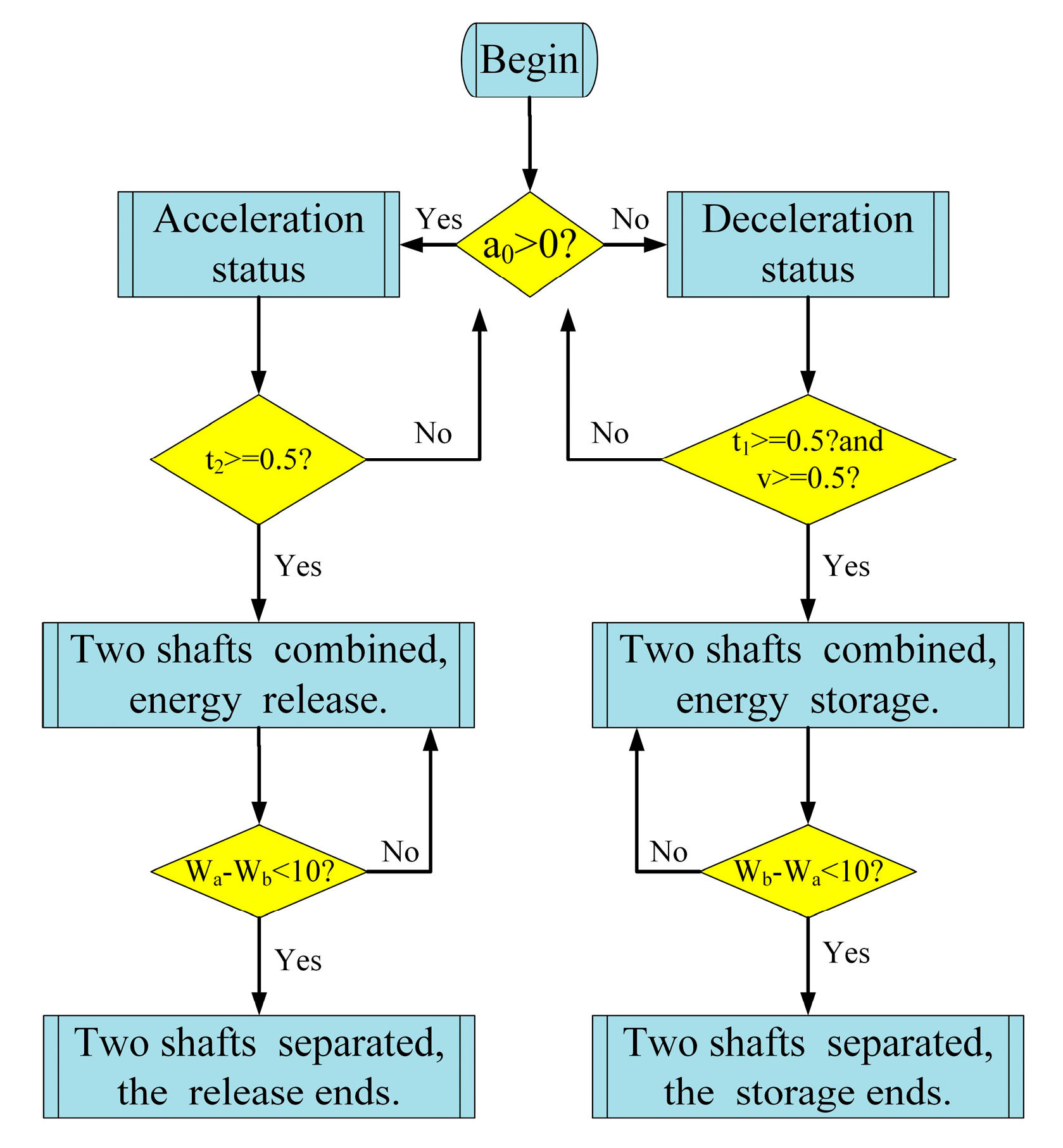
4.3. Energy Recovery Strategies
5. Analysis of the Effect of Energy Recovery
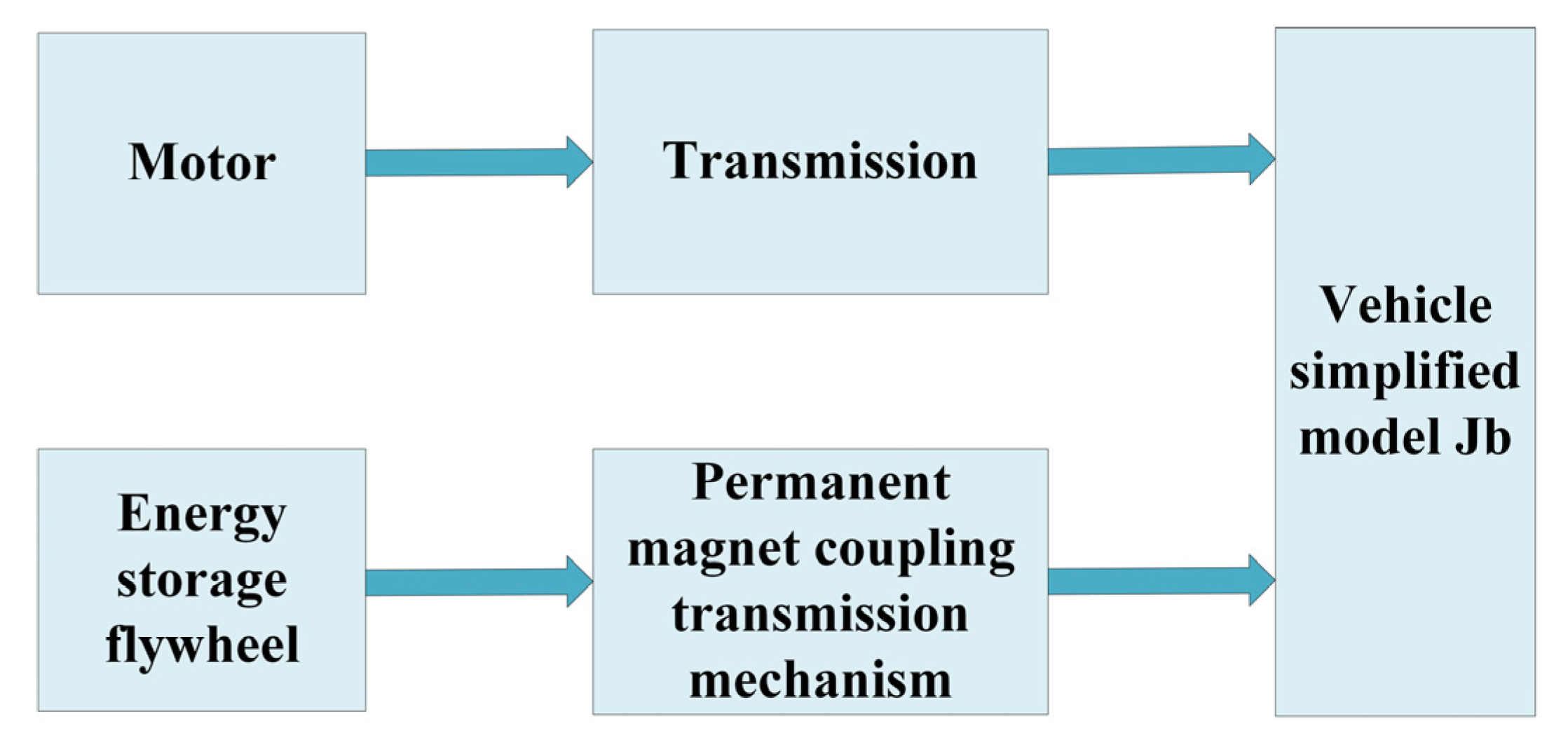
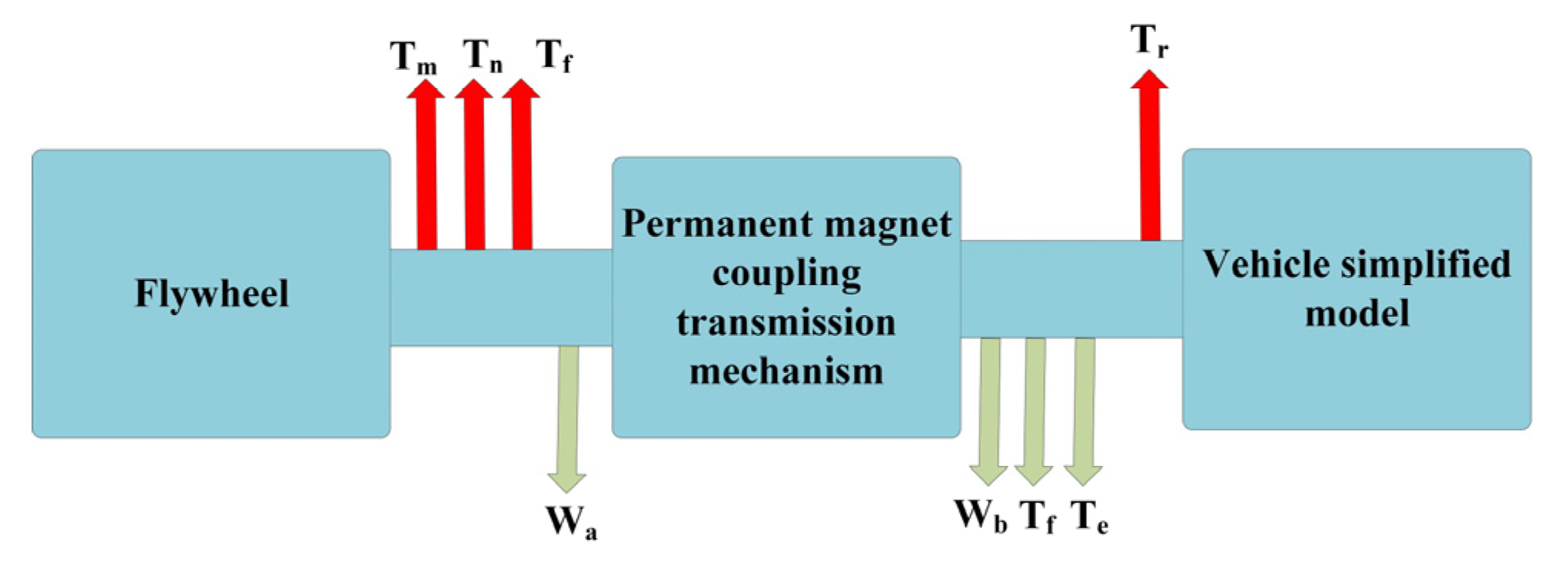
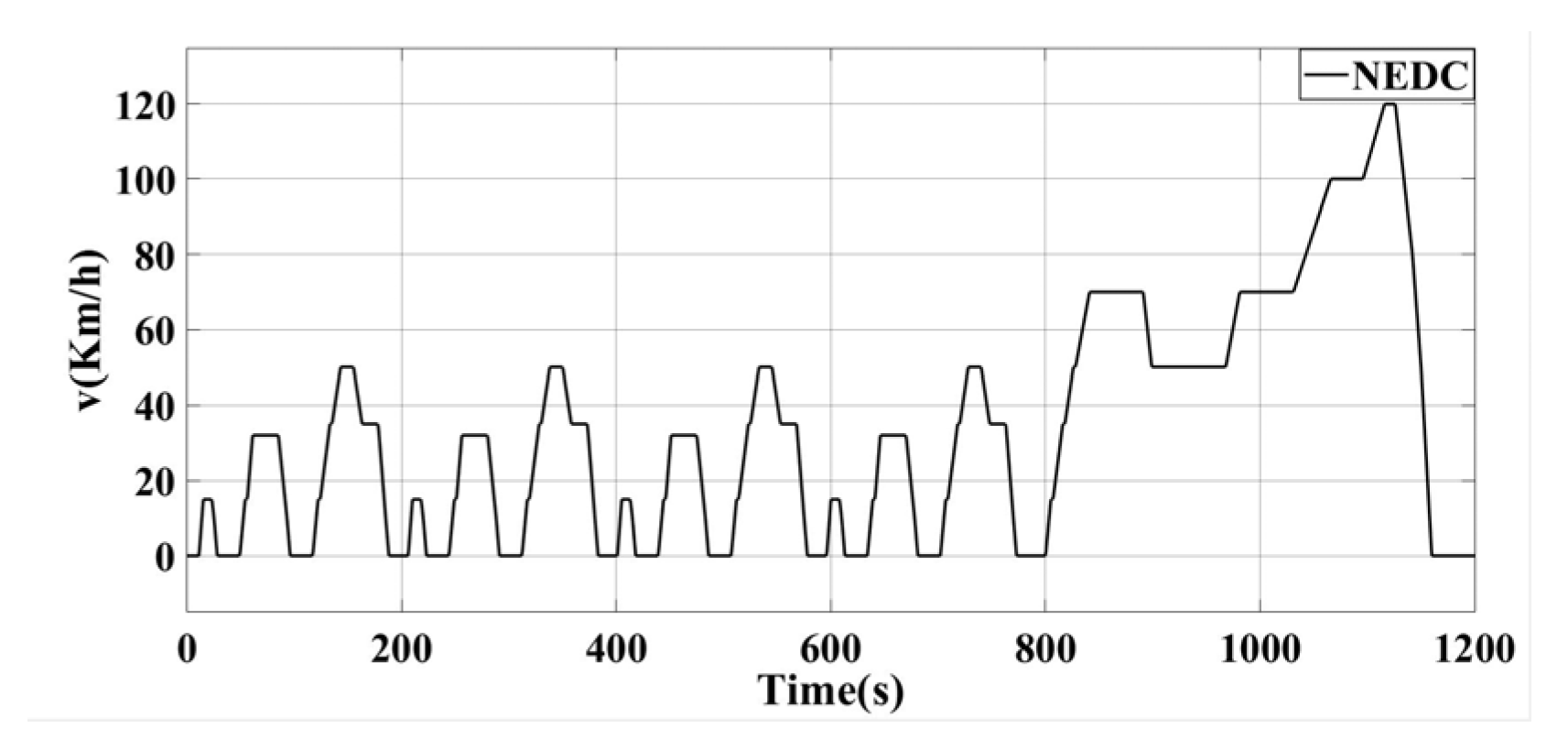
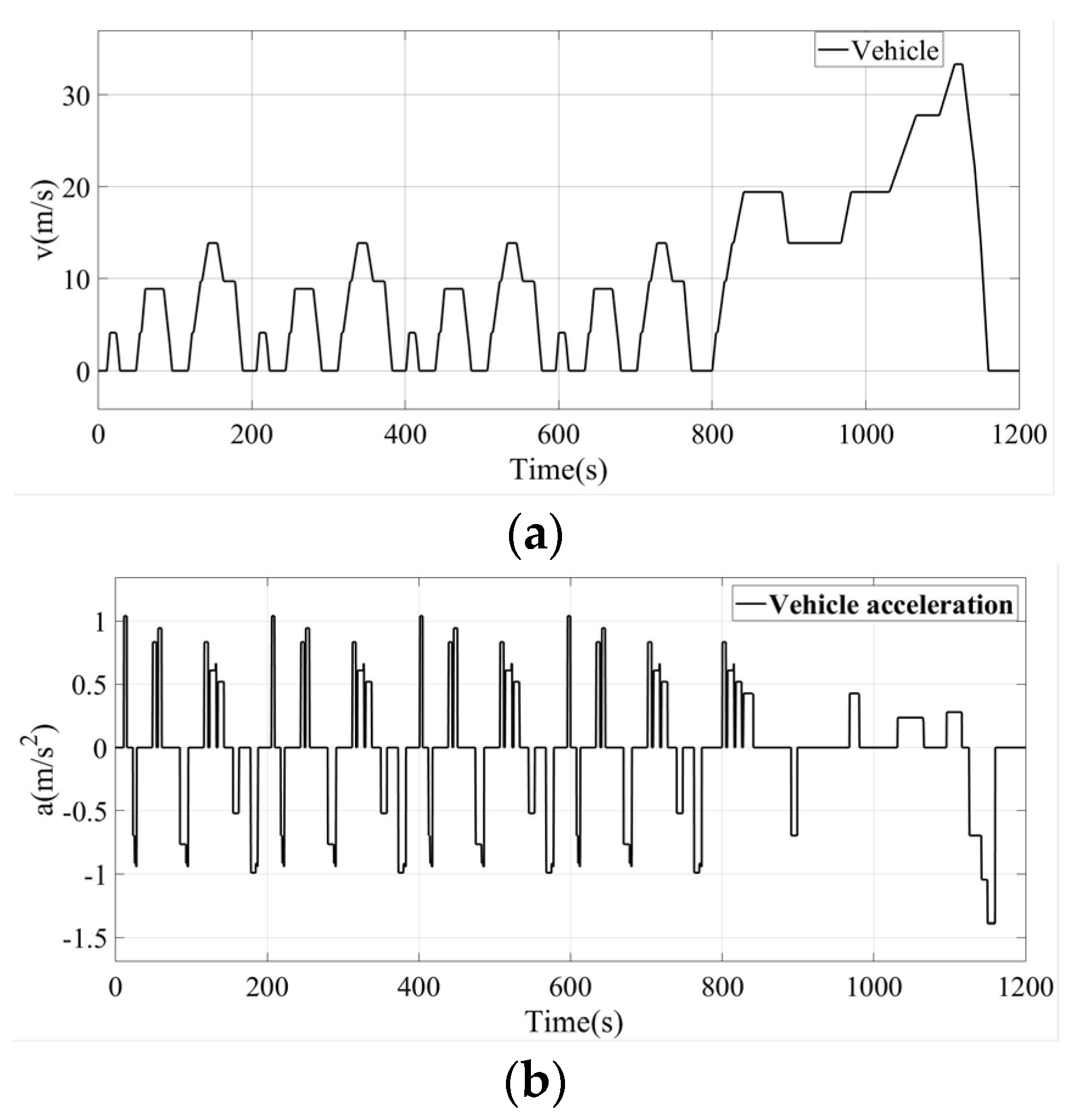
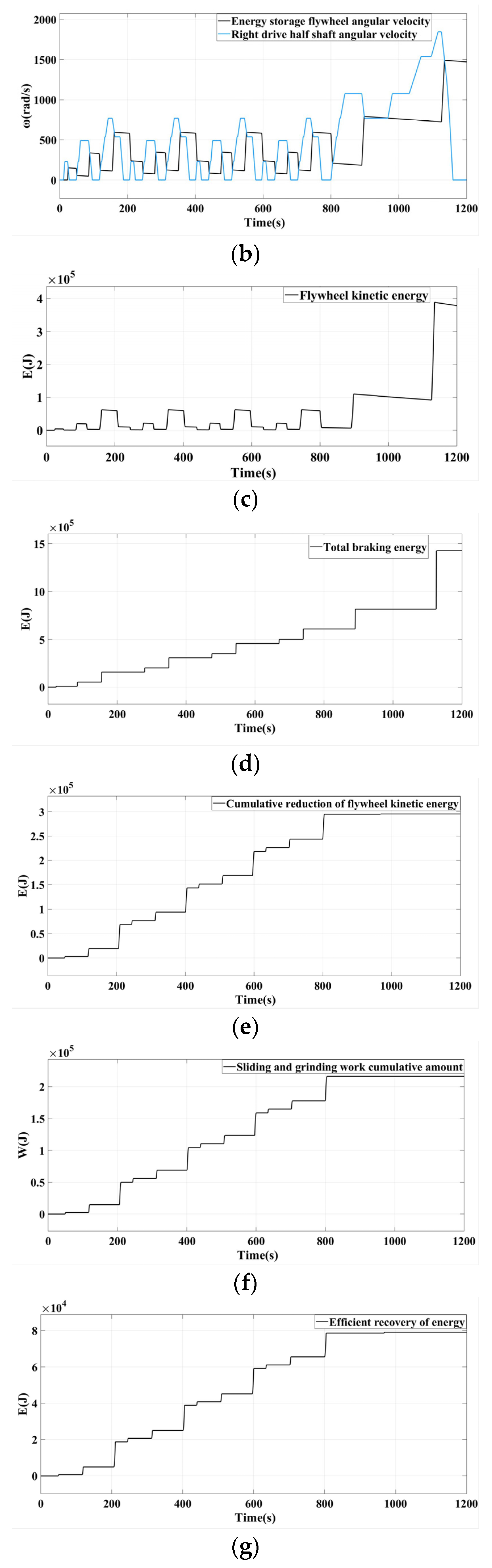
5.1. Model Building
5.2. Simulation Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hong, Z.-F. Design of High-Speed Permanent Magnet Brushless DC Motor for Flywheel Energy Storage; Zhejiang University: Hangzhou, China, 2021. [Google Scholar]
- Xu, F.-F. Study on Brake Energy Recycling in Subway Vehicles; Southeast University: Nanjing, China, 2017. [Google Scholar]
- Hu, Y.-K. High-Power Energy Storage Flywheel Control and Application in Thermal Power Systems; North China Electric Power University: Beijing, China, 2021. [Google Scholar]
- Li, Z.; Nie, Z.; Ai, S.; Xu, J.; Cao, M. An Optimized Charging Control Strategy for Flywheel Energy Storage System Based on Nonlinear Disturbance Observer. Trans. China Electrotech. Soc. 2023, 38, 1506–1518. [Google Scholar]
- Li, B.; Ye, J.-L.; Zhang, Y.; Shi, S.-S.; Wang, H.-J.; Liu, L.-L.; Li, M.-Z. Research on microgrid coordinated control strategy with distributed new energy and electro-mechanical hybrid energy storage. Energy Storage Sci. Technol. 2023, 1–7. [Google Scholar]
- Hong, Y.-Y.; Shi, W.-F. Impulse Load Energy Supply Strategy of Ship Regional Distribution Power System Based on Flywheel Energy Storage Technology. Ship Eng. 2023, 45, 103–109. [Google Scholar]
- Chen, S.-Z.; Wang, Y.-J.; Jiang, X.-Z.; Liu, Z.-L.; Lu, X.-Q. Two-stage flywheel energy storage system based on hybrid vehicle energy recovery. Technol. Innov. Appl. 2021, 11, 10–13+17. [Google Scholar]
- Fu, L.; Sun, S.-F.; Yang, J. Control Strategy of EV Flywheel Energy Storage System. Mach. Des. Manuf. 2019, 7, 258–262. [Google Scholar]
- Wang, S.-Y.; Guo, P.; Xu, Z.-N.; An, L.-C. A review of automotive braking energy recovery system research. Auto Time 2023, 402, 105–108+156. [Google Scholar]
- Xu, S.; Zhao, X.; Yang, N.; Bai, Z. Control Strategy of Braking Energy Recovery for Range-Extended Electric Commercial Vehicles by Considering Braking Intention Recognition and Electropneumatic Braking Compensation. Energy Technol. 2020, 8, 2000407. [Google Scholar] [CrossRef]
- Li, S.; Yu, B.; Feng, X. Research on braking energy recovery strategy of electric vehicle based on ECE regulation and I curve. Sci. Prog. 2019, 103, 1–17. [Google Scholar] [CrossRef]
- Hao, L.; Li, F.; Li, H.-J.; Zhang, X.-L. Regenerative Braking Strategy and Energy Recovery Analysis of Electric Vehicle Based on ESC. Mach. Des. Manuf. 2023, 1–5. [Google Scholar] [CrossRef]
- Wang, W.-Q.; Yu, T.-C.; Yan, Y.-B. Research on Regeneration Braking Energy Recovery Strategy of Electric Bus. Mach. Des. Manuf. 2023, 384, 127–131. [Google Scholar]
- Xiong, H.-Y.; Liu, Z.-W.; He, S. Research on Braking Energy Recovery Strategy of Double axle Drive Pure Electric Vehicle. Comput. Integr. Manuf. Syst. 2019, 36, 6. [Google Scholar]
- Zhou, S.; Xu, C.-L. Research on Brake Energy Recovery Strategy of Pure Electric Vehicle Based on Amesim. Manuf. Upgrad. Today 2021, 132, 56–58. [Google Scholar]
- Zhu, Q.-M.; Yang, J.-X.; Zhu, B.-Q.; Duan, C.-D. Research on Brake Energy Recovery System of Hydrostatic Loader. Constr. Mach. Equip. 2021, 52, 93–99+12. [Google Scholar]
- Jiang, G.-H. Research on braking energy recovery and storage strategy of pure electric vehicle. Energy Conserv. Environ. Prot. Transp. 2021, 17, 18–20. [Google Scholar]
- Li, H.-L.; Chu, J.-W.; Li, H.-G. Energy recovery characteristics of vehicle flywheel energy storage systems. J. Huazhong Univ. Sci. Technol. 2017, 45, 7. [Google Scholar]
- Li, H.; Chu, J.-W.; Yuan, S.-K. Performance of electromagnetic coupling flywheel energy storage devices for vehicles. J. South China Univ. Technol. 2020, 48, 8. [Google Scholar]
- Zhao, X.-T.; Chu, J.-W.; Yuan, S.-K. Analysis of a two-stage flywheel unit for automobile braking energy recovery. Energy Storage Sci. Technol. 2019, 8, 567–574. [Google Scholar]
- Sun, B.-B.; Gu, T.-Q.; Li, B.; Wang, P.-W.; Gao, S.; Wei, S.-B. Design and application of electromechanical flywheel hybrid device for electric vehicle. Energy Rep. 2022, 8, 12570–12582. [Google Scholar] [CrossRef]
- Li, J.-G. Study of Magnetic Force and Magnetic Moment between Permanent Magnets; Jilin University: Changchun, China, 2015. [Google Scholar]
- Ji, P.; Liu, J.-L. Design and research of magnetized reversing transmission device. Coal Mine Mach. 2021, 42, 12–14. [Google Scholar]
- Shu, H.-W. Performance Analysis of Permanent Magnet Eddy Current Couplings; Jilin University: Changchun, China, 2013. [Google Scholar]
- Pan, Y.-S. Mechanical Principles; Chongqing University Press: Chongqing, China, 2016. [Google Scholar]
- Wang, T.-F.; Li, H.-J. The bearing stress field finite factor calculation of high-power direct drive wind turbine. Small Spec. Electr. Mach. 2021, 49, 24–27. [Google Scholar]
- Huang, J.-H.; Wang, F.-Z.; Yang, J.-P. Research on the brake energy recovery system of flywheel vehicles. J. Syst. Simul. 2016, 28, 1197–1205. [Google Scholar]
- Yuan, L.-H.; Zhong, R.-M.; Huang, Z.-P. Research on energy feedback calibration of pure electric vehicles based on NEDC. Intern. Combust. Engine Parts 2021, 342, 182–183. [Google Scholar]
- Ma, X.-N.; Ji, C.-Y.; Xu, E.-Y.; Zheng, W.-G. Research on Brake Energy Recovery Strategy of Rear-drive Pure Electric Vehicle. Mach. Des. Manuf. 2023, 1–4. [Google Scholar] [CrossRef]
- Wang, Y.-D.; Pei, K.-Y. Research on Optimization of Braking Energy Recovery Strategy for Pure Electric Vehicles. Mech. Sci. Technol. Aerosp. Eng. 2022, 41, 1436–1441. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Status | Start | Brake Deceleration | Accelerate after Deceleration |
|---|---|---|---|
| Permanent magnet coupling transmission mechanism status | Disconnection | Combine and then disconnect | Combine and then disconnect |
| Energy storage Flywheel status | There is damping for free rotation | Storage energy | Release energy |
| Drive mode | Motor | No | Motor and flywheel |
| Time division | (0,t1) | (t1,t2) and (t2,t3) | (t3,t4) and (t4,t5) |
| Parameter Name | Value |
|---|---|
| Tire roll radius (r/mm) | 0.362 |
| Vehicle mass (/kg) | 1100 |
| Main deceleration ratio | 4 |
| Transmission efficiency | 92 |
| Pavement slope () | 0 |
| Air resistance coefficient © | 0.32 |
| Windward area (A/m2) | 2 |
| Pavement adhesion coefficient | 0.75~0.9 |
| Magnetic ring position (a/mm) | 35 |
| Friction torque () | 30 |
| Gear train reduction ratio | 5 |
| The moment of inertia of the flywheel () | 0.35 |
| Energy storage flywheel quality (/kg) | 40.14 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, P.; Nie, W.-W.; Liu, J.-L. Research on Magnetic Coupling Flywheel Energy Storage Device for Vehicles. Appl. Sci. 2023, 13, 6036. https://doi.org/10.3390/app13106036
Ji P, Nie W-W, Liu J-L. Research on Magnetic Coupling Flywheel Energy Storage Device for Vehicles. Applied Sciences. 2023; 13(10):6036. https://doi.org/10.3390/app13106036
Chicago/Turabian StyleJi, Peng, Wei-Wen Nie, and Jia-Lu Liu. 2023. "Research on Magnetic Coupling Flywheel Energy Storage Device for Vehicles" Applied Sciences 13, no. 10: 6036. https://doi.org/10.3390/app13106036
APA StyleJi, P., Nie, W.-W., & Liu, J.-L. (2023). Research on Magnetic Coupling Flywheel Energy Storage Device for Vehicles. Applied Sciences, 13(10), 6036. https://doi.org/10.3390/app13106036