
Cross-View Attention Interaction Fusion Algorithm for Stereo Super-Resolution
Abstract
:1. Introduction
2. Network Architecture
2.1. Attention Stereo Fusion Module
2.2. Enhanced Cross-View Interaction Strategy
3. Experimental Results
3.1. Experimental Setup
3.2. Ablation Analysis
3.2.1. Ablation Analysis of Attention Stereo Fusion Module
3.2.2. Ablation Analysis of Enhanced Cross-View Interaction Strategy
3.3. Quantitative Analysis
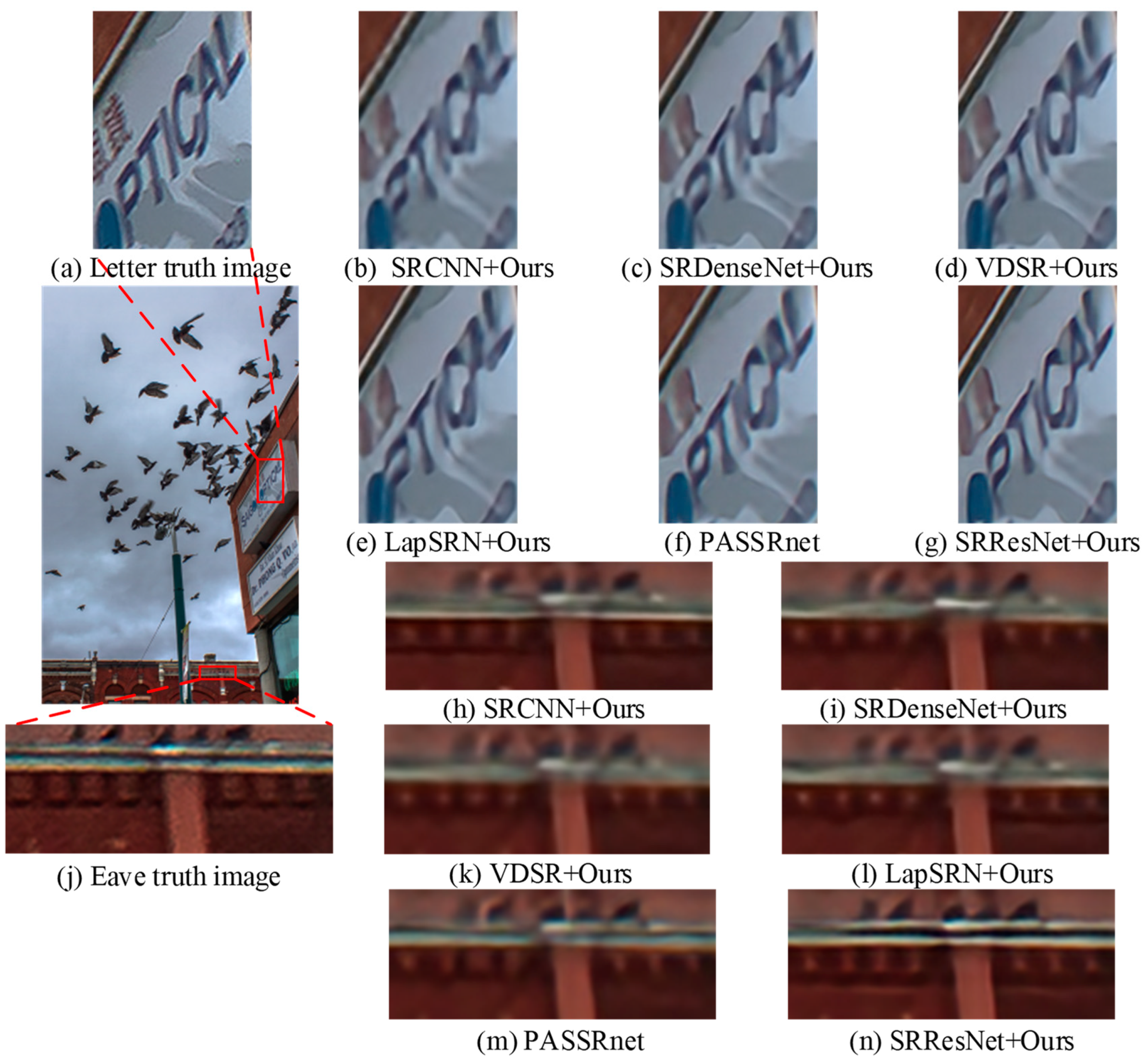
3.4. Qualitative Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shi, S.; Xiangli, B.; Yin, Z. Multiframe super-resolution of color images based on cross channel prior. Symmetry 2021, 13, 901. [Google Scholar] [CrossRef]
- Mastylo, M.; Silva, E. Interpolation of the measure of noncompactness of bilinear operators. Trans. Am. Math. Soc. 2018, 370, 8979–8997. [Google Scholar] [CrossRef]
- Katsuki, T.; Torii, A.; Inoue, M. Posterior-mean super-resolution with a causal gaussian markov random field prior. IEEE Trans. Image Process. 2012, 21, 3182–3193. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chakrabarti, A.; Rajagopalan, A.; Chellappa, R. Super-resolution of face images using kernel PCA-based prior. IEEE Trans. Multimed. 2007, 9, 888–892. [Google Scholar] [CrossRef] [Green Version]
- Esmaeilzehi, A.; Ahmad, M.; Swamy, M. FPNet: A deep light-weight interpretable neural network using forward prediction filtering for efficient single image super resolution. IEEE Trans. Circuits Syst. Ii-Express Briefs 2022, 69, 1937–1941. [Google Scholar] [CrossRef]
- Zhang, Q.; Feng, L.; Liang, H.; Yang, Y. Hybrid domain attention network for efficient super-resolution. Symmetry 2022, 14, 697. [Google Scholar] [CrossRef]
- Dong, C.; Loy, C.; He, K.; Tang, X. Image super-resolution using deep convolutional networks. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 38, 295–307. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, J.; Lee, J.; Lee, K. Accurate image super-resolution using very deep convolutional networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 1646–1654. [Google Scholar]
- Tong, T.; Li, G.; Liu, X.; Gao, Q. Image super-resolution using dense skip connections. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 4809–4817. [Google Scholar]
- Zhang, Y.; Tian, Y.; Kong, Y.; Zhong, B.; Fu, Y. Residual dense network for image restoration. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 13, 1–16. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guo, Y.; Chen, J.; Wang, J.; Chen, Q.; Cao, J.; Deng, Z.; Xu, Y.; Tan, M. Closed-loop matters: Dual regression networks for single image super-resolution. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 5406–5414. [Google Scholar]
- He, Y.; Cao, W.; Du, X.; Chen, C. Internal learning for image super-resolution by adaptive feature transform. Symmetry 2020, 12, 1686. [Google Scholar] [CrossRef]
- Xu, R.; Xiao, Z.; Yao, M.; Zhang, Y.; Xiong, Z. Stereo video super-resolution via exploiting view-temporal correlations. In Proceedings of the 29th ACM International Conference on Multimedia, Virtual, 20–24 October 2021; pp. 460–468. [Google Scholar]
- Ahn, H.; Jeong, J.; Kim, J.; Kwon, S.; Yoo, J. A fast 4K video frame interpolation using a multi-scale optical flow reconstruction network. Symmetry 2019, 11, 1251. [Google Scholar] [CrossRef] [Green Version]
- Jeon, D.; Beak, S.; Choi, I.; Kim, M. Enhancing the spatial resolution of stereo images using a parallax prior. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 1721–1730. [Google Scholar]
- Wang, L.; Wang, Y.; Liang, Z.; Lin, Z.; Yang, J.; An, W.; Guo, Y. Learning parallax attention for stereo image super-resolution. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 12242–12251. [Google Scholar]
- Duan, C.; Xiao, N. Parallax-based spatial and channel attention for stereo image super-resolution. IEEE Access 2019, 7, 183672–183679. [Google Scholar] [CrossRef]
- Song, W.; Choi, S.; Jeong, S. Stereoscopic image super-resolution with stereo consistent feature. Proc. AAAI Conf. Artif. Intell. 2020, 34, 12031–12038. [Google Scholar] [CrossRef]
- Ying, X.; Wang, Y.; Wang, L.; Sheng, W.; An, W.; Guo, Y. A stereo attention module for stereo image super-resolution. IEEE Signal Process. Lett. 2020, 27, 496–500. [Google Scholar] [CrossRef]
- Wang, Y.; Ying, X.; Wang, L.; Yang, J.; An, W.; Guo, Y. Symmetric parallax attention for stereo image super-resolution. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 19–25 June 2020; pp. 1–13. [Google Scholar]
- Dan, J.; Qu, Z.; Wang, X. A disparity feature alignment module for stereo image super-resolution. IEEE Signal Process. Lett. 2021, 28, 1285–1289. [Google Scholar] [CrossRef]
- Zhu, X.; Guo, K.; Fang, H.; Chen, L.; Ren, S.; Hu, B. Cross view capture for stereo image super-resolution. IEEE Trans. Multimed. 2022, 24, 3074–3086. [Google Scholar] [CrossRef]
- Wang, L.; Guo, Y.; Wang, Y.; Liang, Z.; Lin, Z.; Yang, J.; An, W. Parallax attention for unsupervised stereo correspondence learning. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 44, 2108–2125. [Google Scholar] [CrossRef] [PubMed]
- Jin, K.; Wei, Z.; Yang, A.; Guo, S.; Gao, M.; Zhou, X.; Guo, G. SwiniPASSR: Swin transformer based parallax attention network for stereo image super-resolution. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 19–20 June 2022; pp. 919–928. [Google Scholar]
- Chu, X.; Chen, L.; Yu, W. NAFSSR: Stereo image super-resolution using NAFNet. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 1238–1247. [Google Scholar]
- Shi, W.; Caballero, J.; Theis, L.; Huszar, F.; Aitken, A.; Ledig, C.; Wang, Z. Is the deconvolution layer the same as a convolutional layer? arXiv 2016, arXiv:1609.07009. [Google Scholar]
- Huang, G.; Liu, Z.; Weinberger, K. Densely connected convolutional networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2261–2269. [Google Scholar]
- Lai, W.; Huang, J.; Ahuja, N.; Yang, M. Deep laplacian pyramid networks for fast and accurate super-resolution. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 5835–5843. [Google Scholar]
- Wang, Y.; Wang, L.; Yang, J.; An, W.; Guo, Y. Flickr1024: A large-scale dataset for stereo image super-resolution. In Proceedings of the IEEE International Conference on Computer Vision Workshops, Seoul, Republic of Korea, 27–28 October 2019; pp. 3852–3857. [Google Scholar]
- Geiger, A.; Lenz, P.; Urtasun, R. Are we ready for autonomous driving? The KITTI vision benchmark suite. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 3354–3361. [Google Scholar]
- Menze, M.; Geiger, A. Object scene flow for autonomous vehicles. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3061–3070. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Setting of Attention Module | KITTI 2015 | Middlebury | ||
|---|---|---|---|---|
| PSNR (dB) | SSIM | PSNR (dB) | SSIM | |
| PA_1 | 24.98 | 0.849 | 27.94 | 0.886 |
| PA_2 | 25.02 | 0.849 | 27.95 | 0.886 |
| PA_3 | 25.10 | 0.850 | 28.00 | 0.886 |
| (PA + CA)_1 | 25.12 | 0.851 | 28.04 | 0.886 |
| (PA + CA)_2 | 25.16 | 0.851 | 28.10 | 0.886 |
| (PA + CA)_3 | 25.19 | 0.854 | 28.15 | 0.887 |
| (PA + TA)_1 | 25.14 | 0.851 | 28.11 | 0.886 |
| (PA + TA)_2 | 25.23 | 0.856 | 28.21 | 0.886 |
| (PA + TA)_3 | 25.29 | 0.861 | 28.28 | 0.890 |
| Connection and Fusion Settings | Middlebury | KITTI 2015 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| VSC | VDC | TSC | TDC | FS | Ours | PSNR (dB) | SSIM | PSNR (dB) | SSIM |
| ✔ | ✔ | ✔ | 28.21 | 0.880 | 25.23 | 0.851 | |||
| ✔ | ✔ | ✔ | 28.23 | 0.883 | 25.26 | 0.854 | |||
| ✔ | ✔ | ✔ | 28.28 | 0.890 | 25.29 | 0.861 | |||
| ✔ | ✔ | ✔ | 28.29 | 0.889 | 25.29 | 0.860 | |||
| ✔ | ✔ | ✔ | 28.24 | 0.883 | 25.24 | 0.855 | |||
| Models | Middlebury | KITTI 2012 | KITTI 2015 | Average Value |
|---|---|---|---|---|
| ×4 | ×4 | ×4 | ||
| PASSRnet [16] | 28.62 | 26.26 | 25.42 | 26.77 |
| 0.893 | 0.826 | 0.860 | 0.860 | |
| SPAM [18] | 29.36 | 26.31 | 24.81 | 26.83 |
| 0.912 | 0.869 | 0.860 | 0.880 | |
| iPASSR [20] | 29.11 | 26.35 | 25.25 | 26.90 |
| 0.835 | 0.803 | 0.807 | 0.815 | |
| SRCNN [7] + SAM [19] | 27.70 | 25.64 | 24.77 | 26.04 |
| 0.875 | 0.857 | 0.843 | 0.858 | |
| SRCNN [7] + Ours | 27.75 | 25.70 | 24.79 | 26.08 |
| 0.881 | 0.860 | 0.848 | 0.863 | |
| VDSR [8] + SAM [19] | 28.25 | 26.15 | 25.22 | 26.54 |
| 0.887 | 0.868 | 0.855 | 0.870 | |
| VDSR [8] + Ours | 28.28 | 26.21 | 25.29 | 26.59 |
| 0.890 | 0.872 | 0.861 | 0.874 | |
| SRDenseNet [9] + SAM [19] | 28.14 | 26.10 | 25.17 | 26.47 |
| 0.885 | 0.866 | 0.853 | 0.868 | |
| SRDenseNet [9] + Ours | 28.19 | 26.17 | 25.22 | 26.53 |
| 0.892 | 0.872 | 0.859 | 0.874 | |
| LapSRN [28] + SAM [19] | 28.25 | 26.15 | 25.20 | 26.53 |
| 0.888 | 0.868 | 0.855 | 0.870 | |
| LapSRN [28] + Ours | 28.30 | 26.19 | 25.26 | 26.58 |
| 0.894 | 0.872 | 0.861 | 0.876 | |
| SRResNet [26] + SAM [19] | 28.81 | 26.35 | 25.53 | 26.90 |
| 0.897 | 0.873 | 0.863 | 0.878 | |
| SRResNet [26] + Ours | 28.92 | 26.42 | 25.61 | 26.99 |
| 0.905 | 0.881 | 0.872 | 0.886 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Liu, J.; Zhang, T.; Zhao, Z. Cross-View Attention Interaction Fusion Algorithm for Stereo Super-Resolution. Appl. Sci. 2023, 13, 7265. https://doi.org/10.3390/app13127265
Zhang Y, Liu J, Zhang T, Zhao Z. Cross-View Attention Interaction Fusion Algorithm for Stereo Super-Resolution. Applied Sciences. 2023; 13(12):7265. https://doi.org/10.3390/app13127265
Chicago/Turabian StyleZhang, Yaru, Jiantao Liu, Tong Zhang, and Zhibiao Zhao. 2023. "Cross-View Attention Interaction Fusion Algorithm for Stereo Super-Resolution" Applied Sciences 13, no. 12: 7265. https://doi.org/10.3390/app13127265