
A Robust Control Strategy for the Automatic Load Commutation Device Considering Uncertainties of Source and Load
 , ,
, ,
Abstract
:1. Introduction
2. The Uncertainty Models of Renewable Energy and Load Demand
2.1. The Model of Uncertainty for the Output of Photovoltaic Power Generation System
2.2. The Model of Uncertainty for the Output of Wind Power Generation System
2.3. The Model of Uncertainty for Load Demand
3. The Robust Control Model of Automatic Load Commutation Devices Considering the Uncertainties of Source and Load
3.1. The Objective Function of the Robust Control Model for Automatic Load Commutation Devices
3.2. The Constraints of the Robust Control Model for Automatic Load Commutation Devices
- (1)
- Constraints on power balance
- (2)
- Security constraints on node voltage and branch current
- (3)
- Constraint on the output power of root node
- (4)
- Constraint on the number of commutation switch operations
- (5)
- Constraints on the power fluctuations of renewable energy and load demand considering the uncertainties
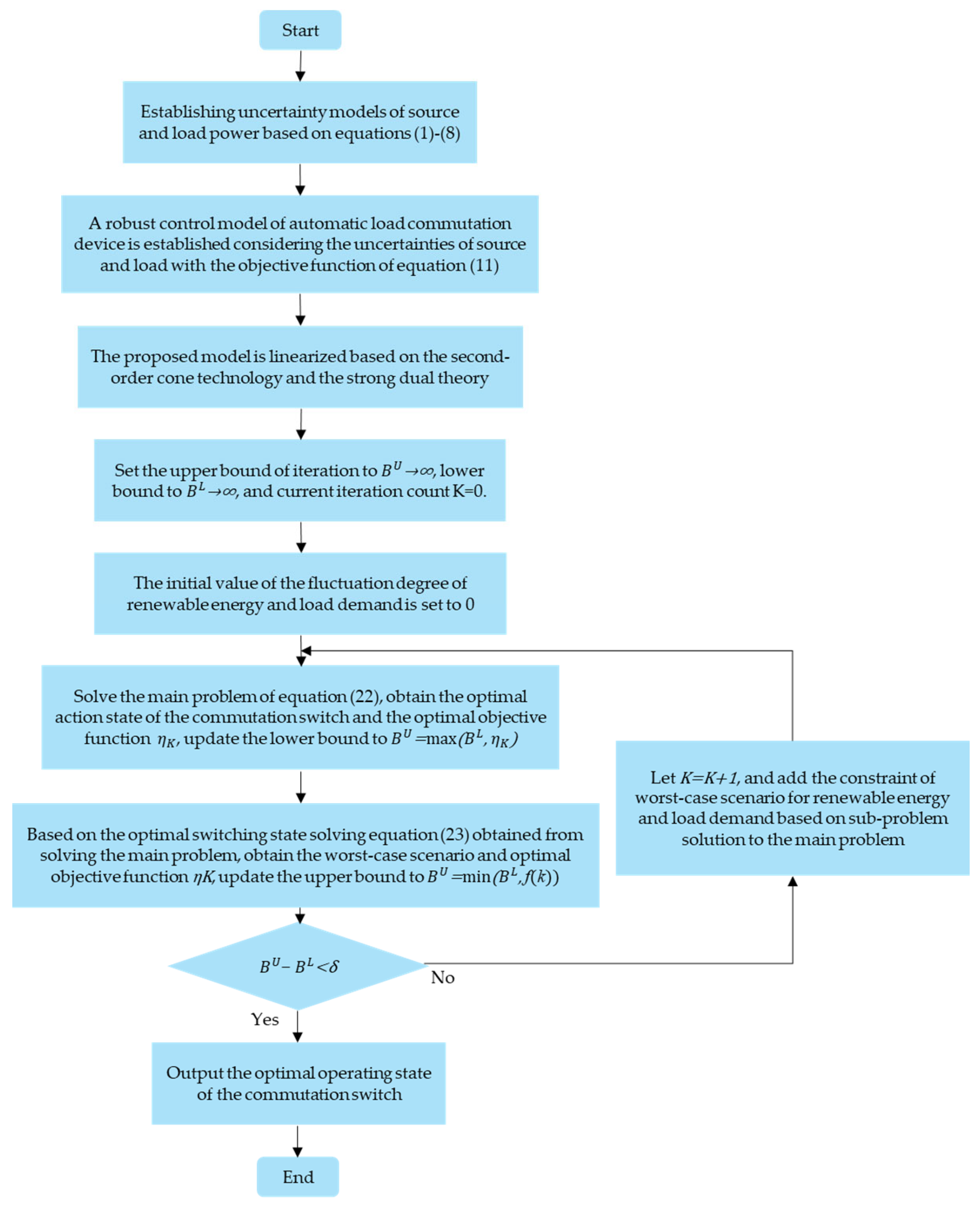
3.3. Solution Algorithm for the Robust Control Model
4. Case Studies
4.1. Case and Parameter Settings
4.2. Result Analysis for Robust Control Implementation in Automatic Load Commutation Devices
4.3. Sensitivity Analysis of Parameters within Uncertainty Sets
5. Conclusions
- (1)
- The selection method of the optimal uncertainty is not considered in this work. The optimal uncertainty can be selected on the basis of the commutation strategy, reasonably reduce the size of the uncertainty set, and weigh the conservatism of the robust control.
- (2)
- The whole optimization cycle for optimization is taken as 24 h in this work, which reduces the number of actions of the commutation device. How to reasonably divide the commutation cycle of the load automatic commutation device within a day to further improve the economy of distribution system operation needs to be studied in the future.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zahedmanesh, A.; Muttaqi, K.M.; Sutanto, D. An adaptable correlated control for maintaining voltage quality in low-voltage distribution grids containing PVs and PEVs. IEEE Trans. Ind. Inform. 2022, 18, 5804–5814. [Google Scholar] [CrossRef]
- Zhang, T.; Liu, S.; Qiu, W.; Lin, Z.; Zhu, L.; Zhao, D.; Qian, M.; Yang, L. KPI-based real-time situational awareness for power systems with a high proportion of renewable energy sources. CSEE J. Power Energy Syst. 2022, 8, 1060–1073. [Google Scholar]
- Liu, S.; You, S.; Lin, Z.; Zeng, C.; Li, H.; Wang, W.; Hu, X.; Liu, Y. Data-driven event identification in the US power systems based on 2D-OLPP and RUSBoosted trees. IEEE Trans. Power Syst. 2022, 37, 94–105. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, Y.; Song, G.; Li, P.; Wang, C.; Wu, J. Congestion management method of low- voltage active distribution networks based on distribution locational marginal price. IEEE Access 2019, 7, 32240–32255. [Google Scholar] [CrossRef]
- Su, X.; Masoum, M.A.S.; Wolfs, P.J. Optimal pv inverter reactive power control and real power curtailment to improve performance of unbalanced four-wire lv distribution networks. IEEE Trans. Sustain. Energy 2014, 5, 967–977. [Google Scholar] [CrossRef]
- Ferreira, P.D.F.; Carvalho, P.M.S.; Ferreira, L.A.F.M.; Ilic, M.D. Distributed energy resources integration challenges in low-voltage networks: Voltage control limitations and risk of cascading. IEEE Trans. Sustain. Energy 2013, 4, 82–88. [Google Scholar] [CrossRef]
- Djerioui, A.; Houari, A.; Saim, A.; Ait-Ahmed, M.; Pierfederici, S.; Benkhoris, M.F.; Machmoum, M.; Ghanes, M. Flatness based grey wolf control for load voltage unbalance mitigation in three-phase four-leg voltage source inverters. IEEE Trans. Ind. Appl. 2020, 56, 1869–1881. [Google Scholar] [CrossRef]
- Chen, Y.; Lao, K.-W.; Qi, D.; Hui, H.; Yang, S.; Yan, Y.; Zheng, Y. Distributed self-triggered control for frequency restoration and active power sharing in islanded microgrids. IEEE Trans. Ind. Inform. 2023, 1–12. [Google Scholar] [CrossRef]
- Chu, Z.; Cui, X.; Zhai, X.; Liu, S.; Qiu, W.; Waseem, M.; Aziz, T.; Wang, Q.; Lin, Z. Anomaly detection and clustering-based identification method for consumer–transformer relationship and associated phase in low-voltage distribution systems. Energy Convers. Econ. 2022, 3, 392–402. [Google Scholar] [CrossRef]
- Guo, Z.C.; Che, J.T.; Guo, Q.D. Adjustment of three-phase unbalanced load in distribution network based on its historical power data and power consumption. Power Syst. Prot. Control 2018, 46, 86–95. [Google Scholar]
- Liu, S.; Jin, R.; Qiu, H.; Cui, X.; Lin, Z.; Lian, Z.; Lin, Z.; Wen, F.; Ding, Y.; Wang, Q.; et al. Practical method for mitigating three-phase unbalance based on data-driven user phase identification. IEEE Trans. Power Syst. 2020, 35, 1653–1656. [Google Scholar] [CrossRef]
- Xiaoyun, Z.; Hongbo, Z.; Dingli, L.; Guanhua, S.; Jian, L. Study on the application of phasing rotation technology in three-phase imbalance control. Power Capacit. React. Power Compens. 2019, 40, 131–135+159. [Google Scholar]
- Fang, H.; Sheng, W.; Wang, J.; Liang, Y.; Wang, S. Research on the method for real-time online control of three-phase unbalanced load in distribution area. CSEE J. Power Energy Syst. 2015, 35, 2185–2193. [Google Scholar]
- Tang, D.; Hao, J.; Liu, R.; Ma, T.; Li, H.; Liu, Y. Control method of three phase load imbalance in a distribution station area based on dynamic programming. Power Syst. Prot. Control 2020, 48, 58–66. [Google Scholar]
- Pingping, H.; Wei, P.; Nan, Z.; Hongbin, W.; Rujia, C. Optimization method for artificial phase sequence based on load forecasting and non-dominated sorting genetic algorithm. Autom. Electr. Power Syst. 2020, 44, 71–78. [Google Scholar]
- Jie, T.; Yin, Y.; Siliang, L.; Yongjun, Z.; Qinhao, L. On-line optimization method for phase sequence in station area based on improved support vector machine and non-dominated sorting genetic algorithm—III. Autom. Electr. Power Syst. 2022, 46, 50–58. [Google Scholar]
- Gutierrez-Lagos, L.; Ochoa, L.F. OPF-based CVR operation in PV-rich MV-LV distribution networks. IEEE Trans. Power Syst. 2019, 34, 2778–2789. [Google Scholar] [CrossRef] [Green Version]
- Ding, J.; Xie, K.; Hu, B.; Shao, C.; Niu, T.; Li, C.; Pan, C. Mixed aleatory-epistemic uncertainty modeling of wind power forecast errors in operation reliability evaluation of power systems. J. Mod. Power Syst. Clean Energy 2022, 10, 1174–1183. [Google Scholar] [CrossRef]
- Surinkaew, T.; Ngamroo, I. Coordinated robust control of dfig wind turbine and pss for stabilization of power oscillations considering system uncertainties. IEEE Trans. Sustain. Energy 2014, 5, 823–833. [Google Scholar] [CrossRef]
- Faustine, A.; Pereira, L. FPSeq2Q: Fully parameterized sequence to quantile regression for net-load forecasting with uncertainty estimates. IEEE Trans. Smart Grid 2022, 13, 2440–2451. [Google Scholar] [CrossRef]
- Baran, M.E.; Wu, F.F. Network reconfiguration in distribution systems for loss reduction and load balance. IEEE Trans. Power Deliv. 1989, 4, 1401–1407. [Google Scholar] [CrossRef]
- Wan, C.; Lin, J.; Song, Y.; Xu, Z.; Yang, G. Probabilistic forecasting of photovoltaic generation: An efficient statistical approach. IEEE Trans. Power Syst. 2017, 32, 2471–2472. [Google Scholar] [CrossRef] [Green Version]
- Farivar, M.; Low, S.H. Branch flow model: Relaxations and convexification—Part I. IEEE Trans. Power Syst. 2013, 28, 2565–2572. [Google Scholar] [CrossRef]
- Li, N.; Chen, L.J.; Low, S.H. Exact convex relaxation of OPF for radial networks using branch flow model. In Proceedings of the IEEE Third International Conference on Smart Grid Communications (SmartGridComm), Tainan, Taiwan, 5–8 November 2012; pp. 7–12. [Google Scholar]
- Arya, L.D.; Koshti, A.; Choube, S.C. Distributed generation planning using differential evolution accounting voltage stability consideration. Int. J. Electr. Power Energy Syst. 2012, 42, 196–207. [Google Scholar] [CrossRef]
- Zeng, B.; Zhao, L. Solving two-stage robust optimization problems using a column-and- constraint generation method. Oper. Res. Lett. 2013, 41, 457–461. [Google Scholar] [CrossRef]
- Lee, C.; Liu, C.; Mehrotra, S.; Bie, Z. Robust distribution network reconfiguration. IEEE Trans. Smart Grid 2015, 6, 836–842. [Google Scholar] [CrossRef]
- Haghighat, Z.B. Distribution system reconfiguration under uncertain load and renewable generation. IEEE Trans. Power Syst. 2016, 31, 2666–2675. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, N.; Li, H.; Yang, J.; Kang, C. Linear three-phase power flow for unbalanced active distribution networks with PV nodes. CSEE J. Power Energy Syst. 2017, 3, 321–324. [Google Scholar] [CrossRef]
- Chen, X.; Wu, W.; Zhang, B. Robust restoration method for active distribution networks. IEEE Trans. Power Syst. 2016, 31, 4005–4015. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
| Branch | Head Node | End Node | Branch Impedance/Ω | Load of End Node/(kW, kvar) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Zaa | Zbb | Zcc | Zab = Zba | Zac = Zca | Zbc = Zcb | Phase A | Phase B | Phase C | |||
| 1 | 1 | 2 | 0.0935 + j0.0477 | 0.0933 + j0.0475 | 0.0931 + j0.0474 | 0.0009 + j0.0004 | 0.0013 + j0.0007 | 0.0011 + j0.0005 | 32 + 19j | 33 + 20j | 35 + 21j |
| 2 | 2 | 3 | 0.5003 + j0.2548 | 0.4989 + j0.2541 | 0.4979 + j0.2536 | 0.0049 + j0.0025 | 0.0073 + j0.0037 | 0.0059 + j0.0030 | 30 + 13j | 31 + 15j | 29 + 13j |
| 3 | 3 | 4 | 0.3714 + j0.1891 | 0.3704 + j0.1886 | 0.3696 + j0.1882 | 0.0036 + j0.0018 | 0.0054 + j0.0027 | 0.0043 + j0.0022 | 45 + 30j | 0 + 0j | 35 + 24j |
| 4 | 4 | 5 | 0.3868 + j0.1970 | 0.3856 + j0.1964 | 0.3849 + j0.1960 | 0.0038 + 0.0019 | 0.0057 + j0.0029 | 0.0045 + j0.0023 | 20 + 10j | 20 + 10j | 20 + 10j |
| 5 | 5 | 6 | 0.8312 + j0.7176 | 0.8288 + j0.7154 | 0.8271 + j0.7140 | 0.0081 + j0.0070 | 0.0122 + j0.0106 | 0.0098 + j0.0084 | 20 + 6j | 20 + 7j | 20 + 7j |
| 6 | 6 | 7 | 0.1900 + j0.6280 | 0.1894 + j0.6262 | 0.1890 + j0.6249 | 0.0018 + j0.0061 | 0.0028 + j0.0092 | 0.0022 + j0.0074 | 65 + 33j | 70 + 34j | 65 + 33j |
| 7 | 7 | 8 | 0.7220 + j0.2386 | 0.7199 + j0.2379 | 0.7185 + j0.2374 | 0.0071 + j0.0023 | 0.0106 + j0.0035 | 0.0085 + j0.0028 | 70 + 34j | 65 + 33j | 65 + 33j |
| 8 | 8 | 9 | 1.0454 + j0.7510 | 1.0423 + j0.7488 | 1.0403 + j0.7473 | 0.0103 + j0.0074 | 0.0154 + j0.0110 | 0.0123 + j0.0088 | 20 + 7j | 18 + 6j | 22 + 7j |
| 9 | 9 | 10 | 1.0596 + j0.7510 | 1.0565 + j0.7488 | 1.0544 + j0.7473 | 0.0104 + j0.0074 | 0.0156 + j0.0110 | 0.0125 + j0.0088 | 21 + 7j | 20 + 7j | 0 + 0j |
| 10 | 10 | 11 | 0.1995 + j0.0659 | 0.1989 + j0.0657 | 0.1985 + j0.0656 | 0.0019 + j0.0006 | 0.0029 + j0.0009 | 0.0023 + j0.0007 | 14 + 9j | 16 + 11j | 15 + 10j |
| 11 | 11 | 12 | 0.3800 + j0.1256 | 0.3788 + j0.1252 | 0.3781 + j0.1250 | 0.0037 + j0.0012 | 0.0056 + j0.0018 | 0.0044 + j0.0014 | 20 + 11j | 20 + 12j | 20 + 12j |
| 12 | 12 | 13 | 1.4900 + j1.1723 | 1.4856 + j1.1688 | 1.4826 + j1.1665 | 0.0146 + j0.0115 | 0.0220 + j0.0173 | 0.0176 + j0.0138 | 21 + 12j | 19 + 11j | 20 + 12j |
| 13 | 13 | 14 | 0.5497 + j0.7235 | 0.5480 + j0.7214 | 0.5470 + j0.7200 | 0.0054 + j0.0071 | 0.0081 + j0.0106 | 0.0064 + j0.0085 | 40 + 28j | 38 + 27j | 42 + 25j |
| 14 | 14 | 15 | 0.5998 + j0.5338 | 0.5980 + j0.5323 | 0.5969 + j0.5312 | 0.0059 + j0.0052 | 0.0088 + j0.0078 | 0.0070 + j0.0063 | 0 + 0j | 19 + 3j | 20 + 3j |
| 15 | 15 | 16 | 0.7514 + j0.5531 | 0.7491 + j0.5515 | 0.7477 + j0.5504 | 0.0074 + j0.0054 | 0.0111 + j0.0081 | 0.0088 + j0.0065 | 19 + 6j | 20 + 7j | 21 + 7j |
| 16 | 16 | 17 | 1.3083 + j1.7468 | 1.3044 + j1.7416 | 1.3018 + j1.7382 | 0.0128 + j0.0172 | 0.0193 + j0.0258 | 0.0154 + j0.0206 | 19 + 6j | 21 + 7j | 20 + 7j |
| 17 | 17 | 18 | 0.7429 + j0.5826 | 0.7407 + j0.5808 | 0.7393 + j0.5797 | 0.0073 + j0.0057 | 0.0109 + j0.0086 | 0.0087 + j0.0068 | 30 + 14j | 30 + 13j | 30 + 13j |
| 18 | 2 | 19 | 0.1664 + j0.1588 | 0.1659 + j0.1583 | 0.1656 + j0.1580 | 0.0016 + j0.0015 | 0.0024 + j0.0023 | 0.0019 + j0.0018 | 33 + 15j | 29 + 13j | 28 + 12j |
| 19 | 19 | 20 | 1.5267 + j1.3757 | 1.5222 + j1.3716 | 1.5192 + j1.3689 | 0.0150 + j0.0135 | 0.0225 + j0.0203 | 0.0180 + j0.0162 | 29 + 13j | 28 + 12j | 33 + 15j |
| 20 | 20 | 21 | 0.4156 + j0.4855 | 0.4144 + j0.4841 | 0.4135 + j0.4831 | 0.0040 + j0.0047 | 0.0061 + j0.0071 | 0.0049 + j0.0057 | 29 + 12j | 30 + 13j | 31 + 15j |
| 21 | 21 | 22 | 0.7195 + j0.9513 | 0.7174 + j0.9485 | 0.7159 + j0.9466 | 0.0070 + j0.0093 | 0.0106 + j0.0140 | 0.0085 + j0.0112 | 28 + 12j | 33 + 15j | 29 + 13j |
| 22 | 3 | 23 | 0.4579 + j0.3129 | 0.4566 + j0.3119 | 0.4557 + j0.3113 | 0.0045 + j0.0030 | 0.0067 + j0.0046 | 0.0054 + j0.0036 | 30 + 16j | 31 + 17j | 29 + 17j |
| 23 | 23 | 24 | 0.9114 + j0.7197 | 0.9087 + j0.7176 | 0.9069 + j0.7161 | 0.0089 + j0.0070 | 0.0134 + j0.0106 | 0.0107 + j0.0085 | 130 + 60j | 140 + 70j | 150 + 70j |
| 24 | 24 | 25 | 0.9094 + j0.7116 | 0.9067 + j0.7095 | 0.9049 + j0.7081 | 0.0089 + j0.0070 | 0.0134 + j0.0105 | 0.0107 + j0.0084 | 150 + 70j | 130 + 70j | 140 + 60j |
| 25 | 6 | 26 | 0.2060 + j0.1049 | 0.2054 + j0.1046 | 0.2050 + j0.1044 | 0.0020 + j0.0010 | 0.0030 + j0.0015 | 0.0024 + j0.1044 | 20 + 8j | 20 + 8j | 20 + 9j |
| 26 | 26 | 27 | 0.2884 + j0.1468 | 0.2876 + j0.1464 | 0.2870 + j0.1461 | 0.0028 + j0.0014 | 0.0042 + j0.0021 | 0.0034 + j0.0017 | 18 + 7j | 22 + 9j | 20 + 9j |
| 27 | 27 | 28 | 1.0748 + j0.9477 | 1.0717 + j0.9449 | 1.0695 + j0.9430 | 0.0105 + j0.0093 | 0.0158 + j0.0140 | 0.0127 + j0.0112 | 19 + 6j | 22 + 8j | 19 + 6j |
| 28 | 28 | 29 | 0.8162 + j0.7111 | 0.8138 + j0.7090 | 0.8122 + j0.7076 | 0.0080 + j0.0070 | 0.0120 + j0.0105 | 0.0096 + j0.0084 | 38 + 23j | 42 + 25j | 40 + 22j |
| 29 | 29 | 30 | 0.5151 + j0.2623 | 0.5135 + j0.2616 | 0.5125 + j0.2610 | 0.0050 + j0.0025 | 0.0076 + j0.0038 | 0.0060 + j0.0031 | 60 + 180j | 70 + 210j | 70 + 210j |
| 30 | 30 | 31 | 0.9890 + j0.9774 | 0.9860 + j0.9745 | 0.9841 + j0.9726 | 0.0097 + j0.0096 | 0.0146 + j0.0144 | 0.0116 + j0.0115 | 45 + 20j | 51 + 23j | 54 + 27j |
| 31 | 31 | 32 | 0.3151 + j0.3637 | 0.3142 + j0.3662 | 0.3136 + j0.3655 | 0.0031 + j0.0036 | 0.0046 + j0.0054 | 0.0037 + j0.0043 | 70 + 33j | 72 + 35j | 68 + 32j |
| 32 | 32 | 33 | 0.3461 + j0.5381 | 0.3450 + j0.5365 | 0.3444 + j0.5355 | 0.0034 + j0.0053 | 0.0051 + j0.0079 | 0.0040 + j0.0063 | 20 + 13j | 20 + 14j | 20 + 13j |
| Commutation Load Node | Robust Control Model | Deterministic Control Model | ||
|---|---|---|---|---|
| Load Phase before Commutation | Load Phase after Commutation | Load Phase before Commutation | Load Phase after Commutation | |
| 1 | A | A | A | A |
| 2 | A | A | A | A |
| 3 | A | A | A | A |
| 4 | A | A | A | A |
| 5 | A | A | A | A |
| 6 | A | A | A | A |
| 7 | A | A | A | A |
| 8 | A | A | A | A |
| 9 | B | B | B | B |
| 10 | B | B | B | B |
| 11 | B | B | B | B |
| 12 | B | B | B | B |
| 13 | B | B | B | B |
| 14 | B | B | B | B |
| 15 | B | B | B | B |
| 16 | B | B | B | B |
| 17 | B | B | B | B |
| 18 | B | B | B | B |
| 19 | B | B | B | B |
| 20 | B | B | B | B |
| 21 | C | C | C | C |
| 22 | C | C | C | C |
| 23 | C | C | C | C |
| 24 | C | B | C | C |
| 25 | C | C | C | C |
| 26 | C | C | C | C |
| 27 | C | C | C | C |
| 28 | C | C | C | C |
| 29 | C | A | C | C |
| 30 | C | A | C | C |
| 31 | C | C | C | C |
| 32 | C | A | C | A |
| Three-phase Total Network Loss | 842.41 kW | 748.29 kW·h | 442.74 kW·h | 371.11 kW·h |
| Total Number of Commutation Times | 0 | 4 | 0 | 1 |
| Model for Solving | Value of Objective Function/USD | |
|---|---|---|
| Predictive Output Scenario | Worst-Case Scenario | |
| Deterministic Control Model | 297.89 | 665.88 |
| Robust Control Model | 322.75 | 602.63 |
| Uncertainty Factor | Deviation Amount/% | Objective Function Value of the Deterministic Control Model/USD | Objective Function Value of Robust Control Model/USD |
|---|---|---|---|
| Uncertainty of Load Demand | 10 | 366.17 | 337.09 |
| 20 | 442.95 | 403.58 | |
| 30 | 528.42 | 483.59 | |
| 40 | 622.66 | 569.20 | |
| Uncertainty of Renewable Energy Output | 10 | 294.73 | 315.61 |
| 20 | 293.84 | 314.92 | |
| 30 | 288.71 | 310.96 |
| Uncertainty | Objective Function Value Corresponding to the | ||
|---|---|---|---|
| 0.6 | 0.8 | 1.0 | |
| 0.6 | 494.76 | 538.32 | 583.33 |
| 0.8 | 502.05 | 546.65 | 592.74 |
| 1.0 | 509.93 | 555.52 | 602.63 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Chu, Z.; Chen, G.; Zhang, T.; Ma, Y.; Chen, C.; Lin, Z. A Robust Control Strategy for the Automatic Load Commutation Device Considering Uncertainties of Source and Load. Appl. Sci. 2023, 13, 7390. https://doi.org/10.3390/app13137390
Wang Y, Chu Z, Chen G, Zhang T, Ma Y, Chen C, Lin Z. A Robust Control Strategy for the Automatic Load Commutation Device Considering Uncertainties of Source and Load. Applied Sciences. 2023; 13(13):7390. https://doi.org/10.3390/app13137390
Chicago/Turabian StyleWang, Yicheng, Zhenyue Chu, Guang Chen, Tianhan Zhang, Yuanqian Ma, Changming Chen, and Zhenzhi Lin. 2023. "A Robust Control Strategy for the Automatic Load Commutation Device Considering Uncertainties of Source and Load" Applied Sciences 13, no. 13: 7390. https://doi.org/10.3390/app13137390