
Proactive Mission Planning of Unmanned Aerial Vehicle Fleets Used in Offshore Wind Farm Maintenance
 , , and
, , and
Abstract
:1. Introduction
- A declarative reference model of OWF maintenance logistics enabling the integration of operation vessel routing and scheduling problems with UAV delivery and monitoring mission planning problems;
- Procedures for proactive/reactive cruise planning of vessel mooring to selected WTs, including when service teams disembark and return to the vessel, as well as the use of drones for delivery and monitoring purposes;
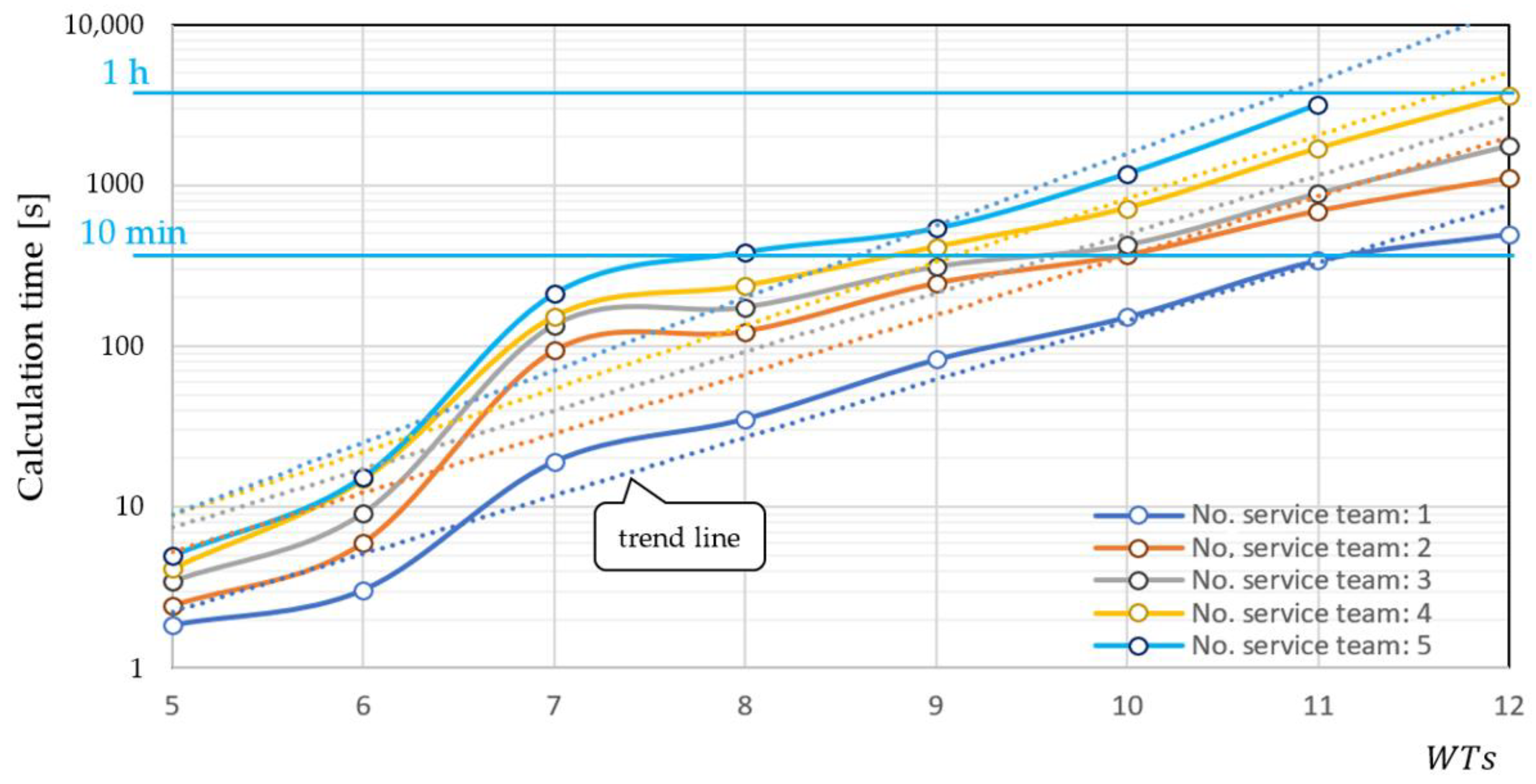
- The results of many computer experiments, illustrating the possibility of using the presented approach to generate alternative scenarios of OWF maintenance logistics, as well as its scalability.
2. Related Work
3. Model Formulation
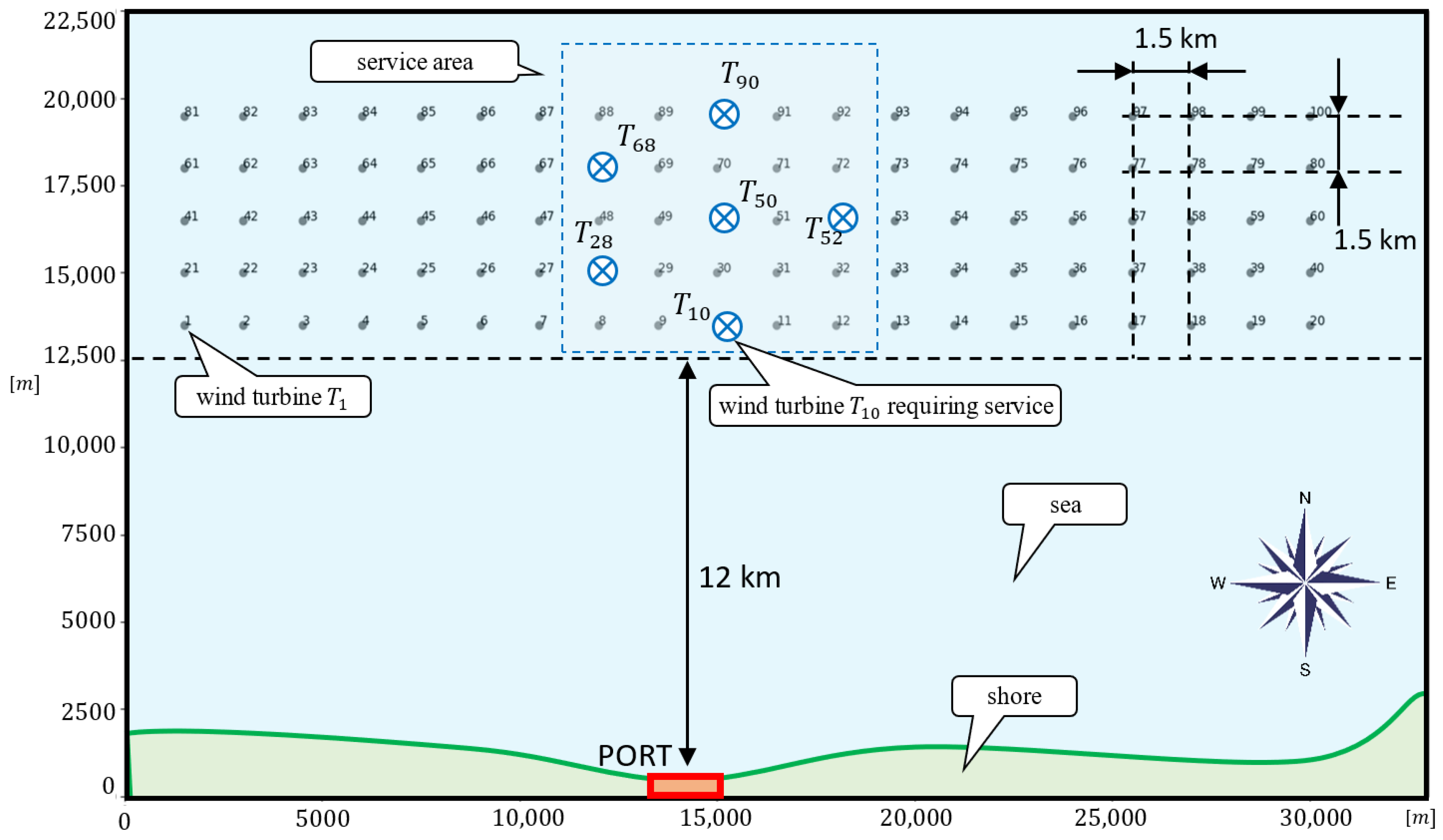
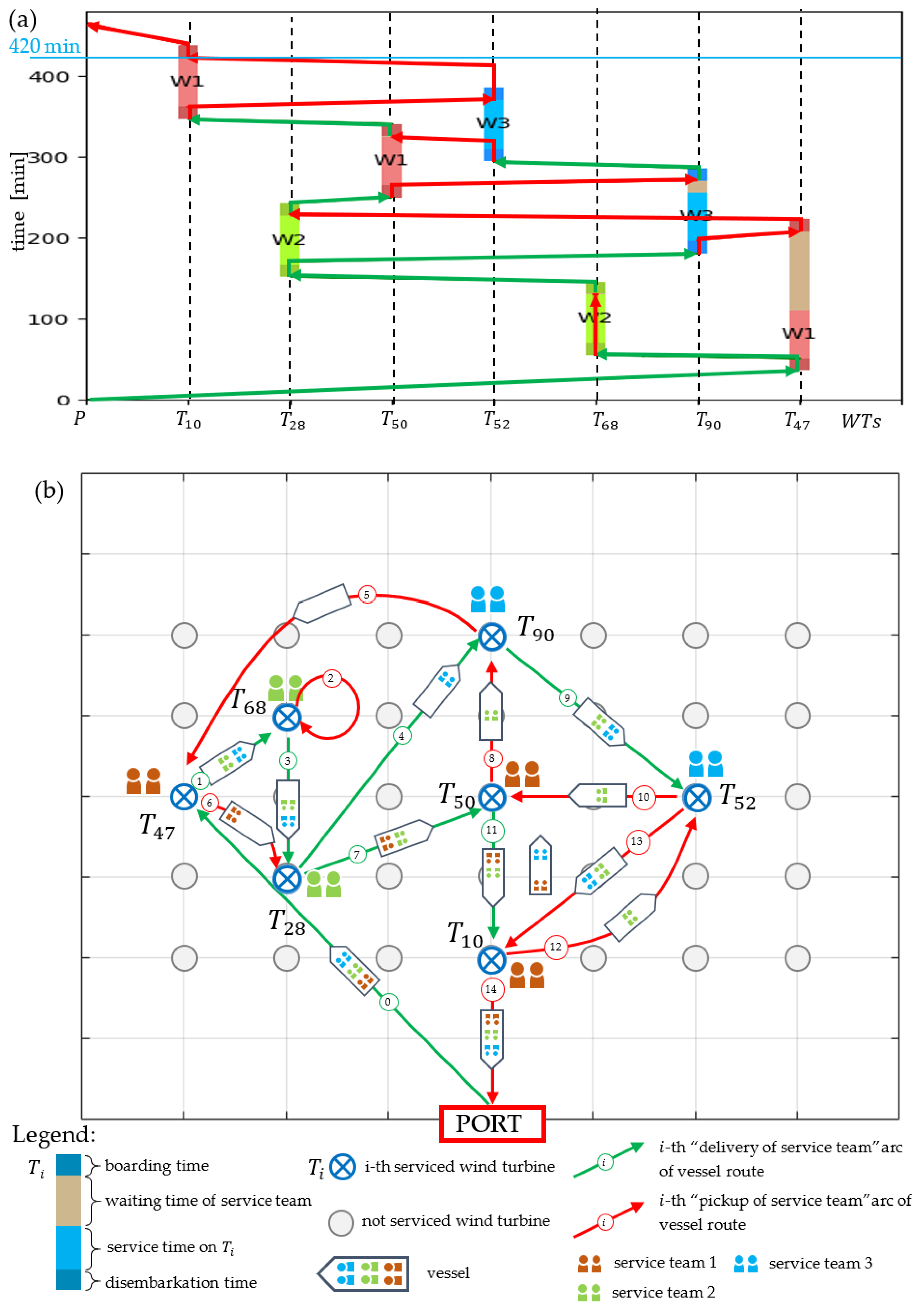
3.1. Illustrative Example
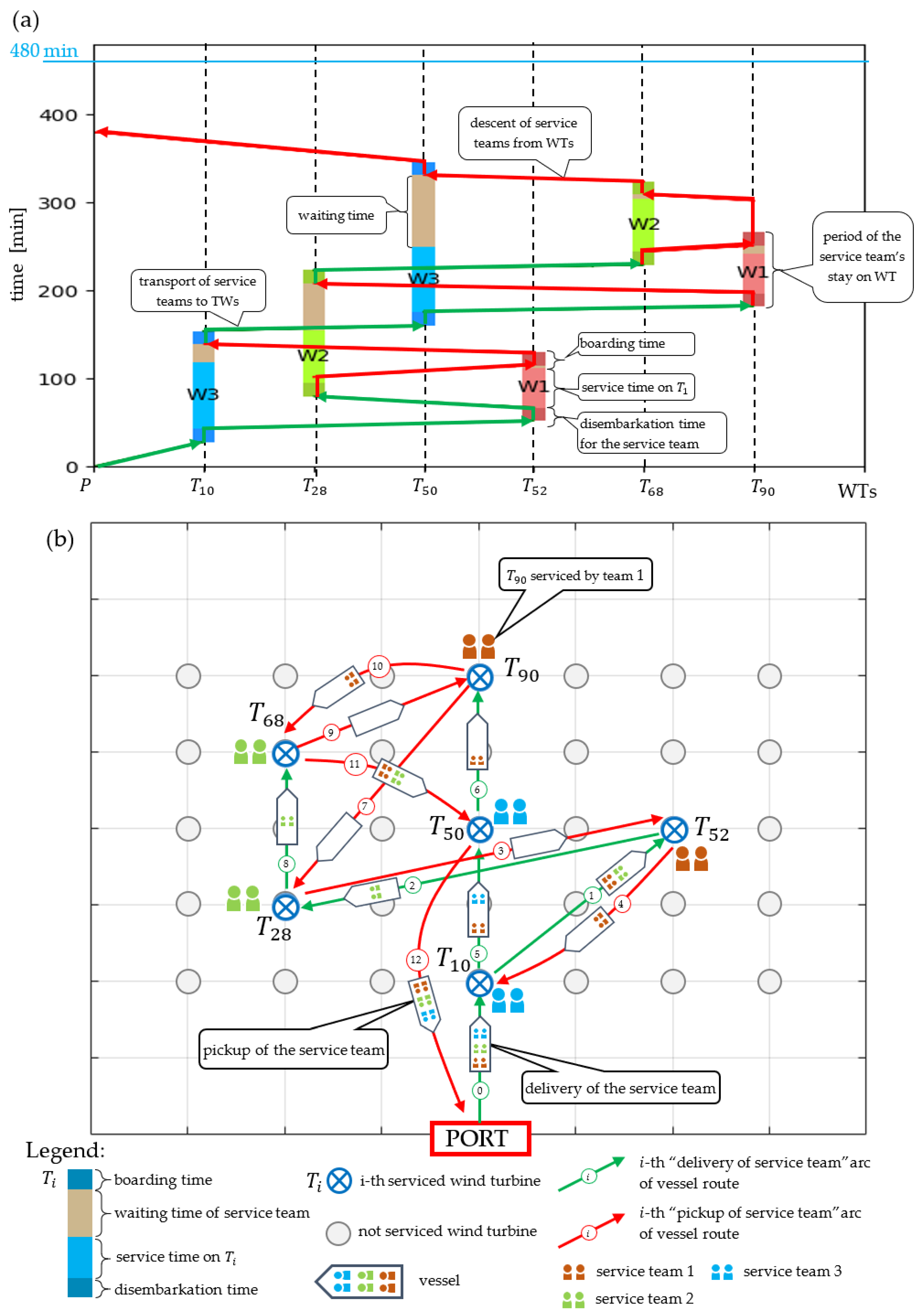
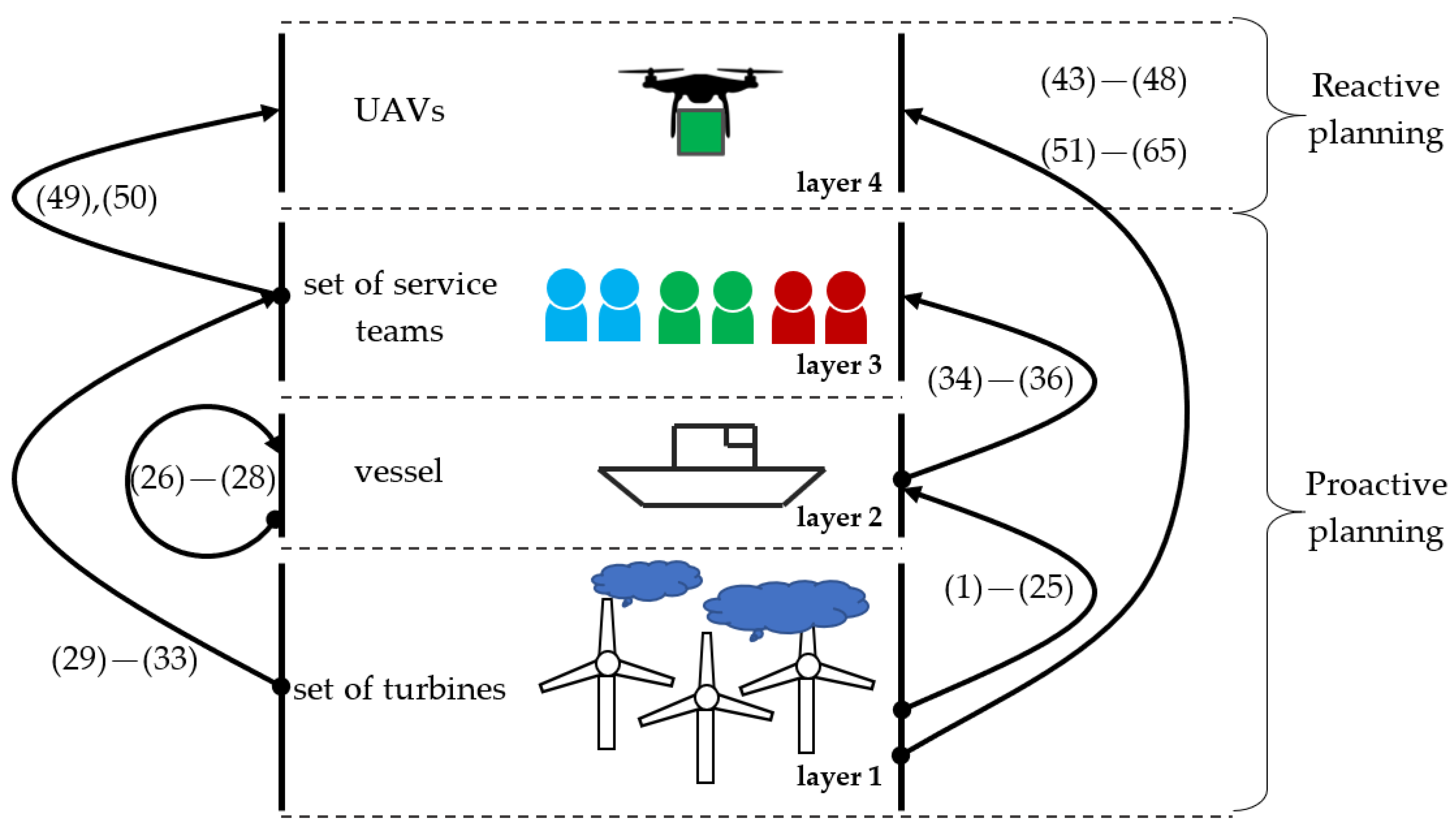
- Proactive planning: The pre-mission stage in which the vessel’s route and the assignment of service teams to WTs are planned. Only teams responsible for servicing turbines are considered.The vessel’s mission is determined, guaranteeing minimal cost of servicing a given set of WTs by a given set of service teams.
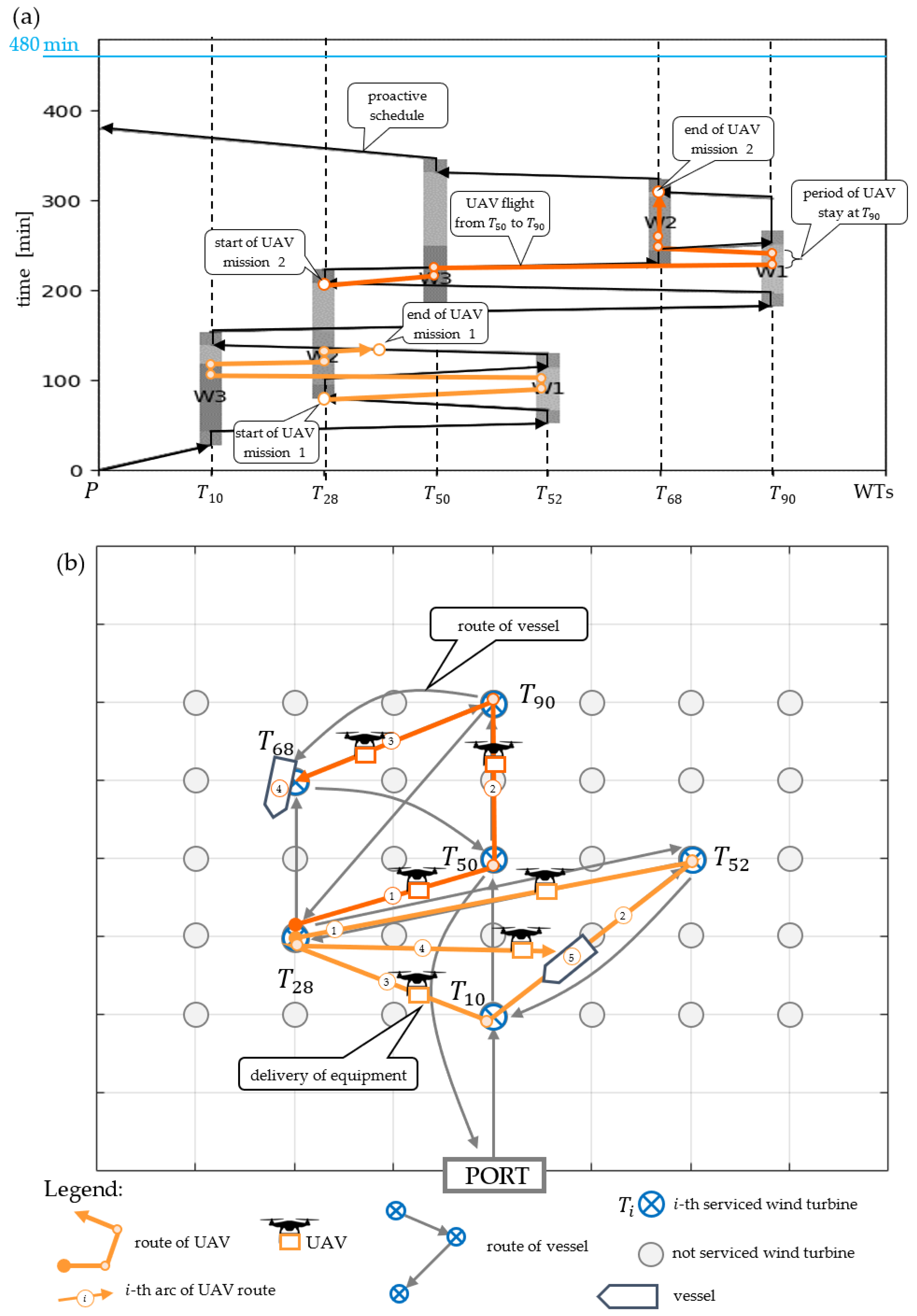
- Reactive planning: This stage is carried out during the implementation of the mission. During the mission, requests are received from service teams (servicing WTs) regarding spare parts required for delivery to WT. A fleet of UAVs and service teams are available on the vessel. The position of the vessel, its route, and the weather conditions are known.
- The set of WTs that require service (specified by data such as WT position, estimated service time, and WT demand for parts transported by UAVs) is known.
- The fleet of vessels transporting service teams (in the considered case, the fleet contains only one vessel), specified by technical data such as vessel travel times between WTs and the base (port) and the costs of vessel usage (distinguishing two kinds of cost: one when the ship is traveling and the second when the ship is moored, e.g., during boarding/disembarking operations of service teams), is known.
- The service teams, as subsets of the set (specified by data such as the competence of the service personnel, the costs associated with employment, and the approximate times needed to perform the same activity), are known.
- The available fleet of UAVs transporting parts to the WT (in the considered case, the fleet contains only one UAV), specified by technical data about the UAVs and their cost of usage, are known.
- All assumed WTs (from a set ) must be serviced.
- One team of technicians can service only one WT at a time.
- Parts for WTs should be delivered when the work is carried out by the service team.
- Milk-run UAV routes are allowed (UAVs can deliver and receive parts for several WTs (i.e., pick and place mode) as long as the cumulative weight of the components does not exceed the weight capacity).
- The requirements for WT spare parts are known in advance.
3.2. Declarative Model Description
- Constraints determining the permissible routes of the vessel:
- Constraints that, if fulfilled, guarantee the timely delivery and pick-up of service teams:
- Constraints determining the allocation of service teams to WTs and the schedule of tasks carried out by them in a given time horizon:
- Cost constraints:
- Constraints determining the route and schedule of deliveries carried out by the UAVs:
- Constraints on the amount of equipment to be supplied:
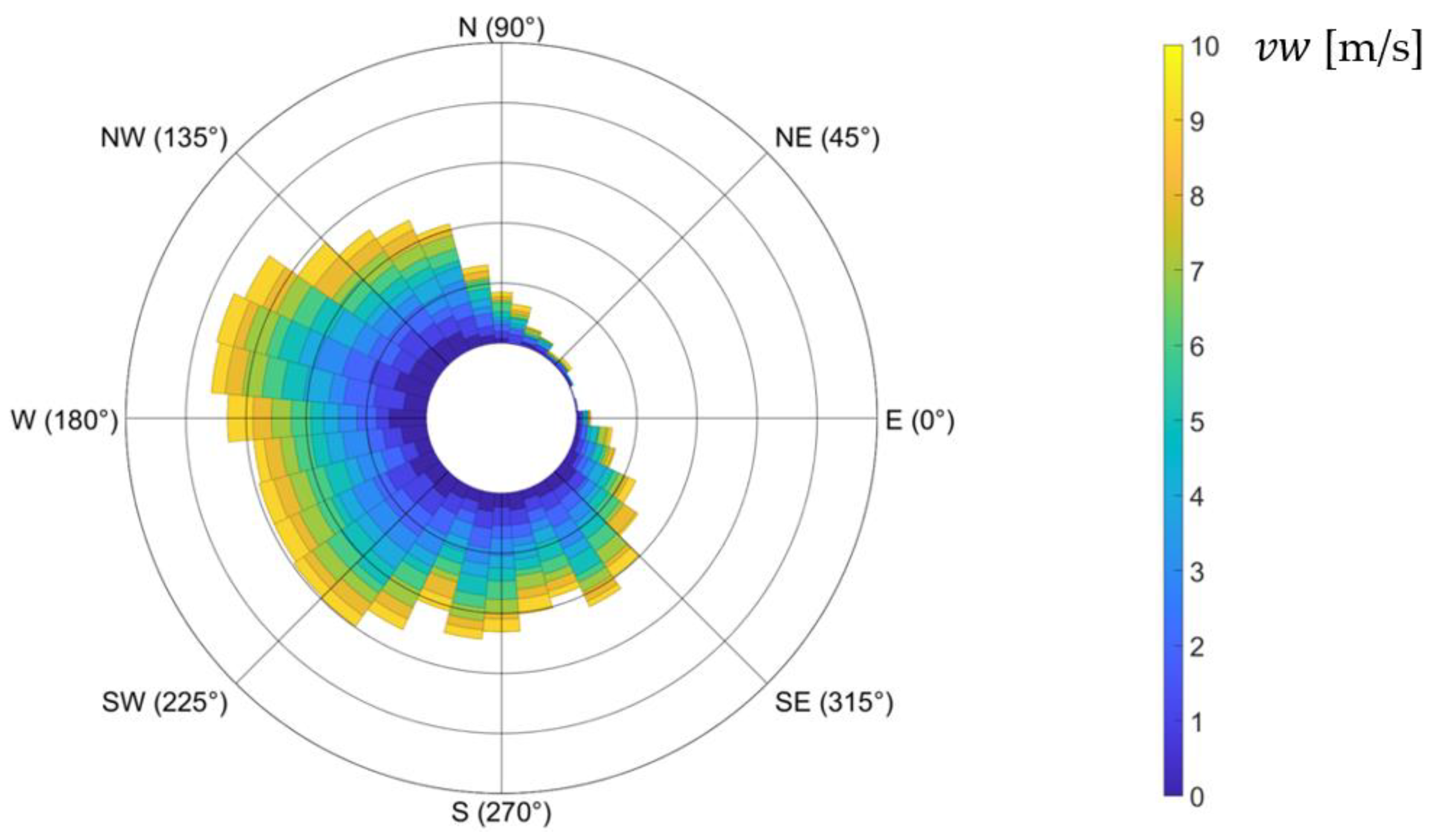
- Constraints that, if fulfilled, guarantee the implementation of the desired deliveries in the forecasted weather conditions:where and depend on the assumed goods delivery strategy.
3.3. Problem Statement
- The analysis problem comes down to searching for answers to the following questions: Do the available resources (vessels, service teams, and UAV fleets) allow for the servicing of a given set of WTs in the assumed time horizon ? And, if so, what is the service plan that guarantees minimal cost ?
- The synthesis problem comes down to the search for an answer to the following question: What is/are the structure/parameters of the used resources (vessels, service teams, and UAV fleets) that guarantee the service of a given set of WTs in the assumed time horizon and the given cost ?
- For proactive planning:where
- —a set of decision variables that determine the plan of mission :
- ○
- a set containing the variables of the vessel route: ;
- ○
- —the schedule of a vessel: ;
- ○
- —an assignment for the service teams: ;
- ○
- —a schedule for the service teams: ;
- —a finite set of decision variable domain descriptions: , ;
- a set of constraints specifying the relationships between the vessels, service teams and routes, and turbine networks (1)–(42).
- For reactive planning:where
- —a set of decision variables that determine the plan of mission :
- ○
- a set containing the variables of the UAV route: ;
- ○
- —the schedule of a UAV: ;
- ○
- —the weight of the delivered equipment: ;
- —a finite set of decision variable domain descriptions: , ;
- —a set of constraints specifying the relationships between the UAVs, transported equipment, and proactive plans (43)–(65).
4. Case Study
4.1. Wind Turbine Service
4.2. Spare-Part Distribution
- Stage 1: The UAV takes off from the vessel at the 94th minute and flies to ; after unloading the equipment, it flies on to and and then returns to the vessel.
- Stage 2: The UAV takes off from the vessel at the 182nd minute and flies to ; after unloading the equipment, it flies on to and then returns to the vessel.
- Stage 3: The UAV takes off from the vessel at the 294th minutes and flies to ; after unloading the equipment, it flies on to and then returns to the vessel.
5. Scalability Assessment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Glossary
| Parameters | |
| a set of points visited by vessel (WTs and port); , where is a point representing the port and are the points representing the wind turbines | |
| a set of points visited by the UAV (wind turbines and vessel); , where is a point representing the vessel and , | |
| the vessel travel time between points and | |
| the UAV travel time between points and | |
| the vessel wait time at point | |
| the UAV wait time at point | |
| the nominal service time of point | |
| W | the set of service teams; |
| the time of entry onto/exit from the ship | |
| the impact of team on the time of service operation | |
| the time horizon | |
| the demand at point , | |
| the maximum loading capacity of a UAV | |
| the front-facing area of a UAV | |
| the aerodynamic drag coefficient | |
| the empty weight of a UAV | |
| air density | |
| gravitational acceleration | |
| the forecasted wind speed | |
| the width of a UAV | |
| the energy capacity of a UAV | |
| the air speed between points and | |
| the ground speed between points and | |
| the heading angle of vector | |
| the course angle of vector | |
| the cost per hour for vessel operation | |
| the cost per hour for vessel parking | |
| the cost per hour for work performed by service team | |
| the cost hour of waiting by service team | |
| the cost per hour for UAV use | |
| Decision variables | |
| the binary variable used to indicate if the vessel travels to from in order to deliver a service team | |
| the binary variable used to indicate if the vessel travels to from in order to pick up a service team | |
| the binary variable used to indicate if the travels between points and | |
| the time at which the vessel arrives at point in order to deliver a service team | |
| the time at which the vessel starts traveling to point in order to deliver a service team | |
| the time at which the vessel arrives at point in order to pick up a service team | |
| the time at which the vessel starts traveling to point in order to pick up a service team | |
| the time at which the service team stops working at point | |
| the time at which the service team starts working at point | |
| s | the take-off time of the |
| the time at which the UAV arrives at point | |
| the time at which the UAV departs from point | |
| the service time of point | |
| the binary variable used to indicate if team is assigned to service | |
| the weight of the equipment delivered to point | |
| the weather resistance function | |
| the cost of sailing the vessel to point | |
| the cost of the vessel waiting at point | |
| the cost of using service team at point | |
| the cost of service team waiting at point | |
| the cost of the UAV travelling to point | |
| the total cost of the mission | |
References
- Shafiee, M. Maintenance logistics organization for offshore wind energy: Current progress and future perspectives. Renew. Energy 2015, 77, 182–193. [Google Scholar] [CrossRef]
- George, B.; Loo, J.; Jie, W. Recent advances and future trends on maintenance strategies and optimisation solution techniques for offshore sector. Ocean. Eng. 2022, 250, 110986. [Google Scholar] [CrossRef]
- Tracht, K.; Westerholt, J.; Schuh, P. Spare Parts Planning for Offshore Wind Turbines Subject to Restrictive Maintenance Conditions. Proc. CIRP 2013, 7, 563–568. [Google Scholar] [CrossRef] [Green Version]
- Rajabi, M.S.; Beigi, P.; Aghakhani, S. Drone Delivery Systems and Energy Management: A Review and Future Trends. In Handbook of Smart Energy Systems; Springer: Berlin/Heidelberg, Germany, 2022; pp. 1–19. [Google Scholar] [CrossRef]
- Shafiee, M.; Zhou, Z.; Mei, L.; Dinmohammadi, F.; Karama, J.; Flynn, D. Unmanned Aerial Drones for Inspection of Offshore Wind Turbines: A Mission-Critical Failure Analysis. Robotics 2021, 10, 26. [Google Scholar] [CrossRef]
- Galleguillos, C.; Zorrilla, A.; Jimenez, A.; Diaz, L.; Montiano, Á.L.; Barroso, M.; Viguria, A.; Lasagni, F. Thermographic non-destructive inspection of wind turbine blades using unmanned aerial systems. Plast. Rubber Compos. 2015, 44, 98–103. [Google Scholar] [CrossRef]
- Nordin, M.H.; Sharma, S.; Khan, A.; Gianni, M.; Rajendran, S.; Sutton, R. Collaborative Unmanned Vehicles for Inspection, Maintenance; Repairs of Offshore Wind Turbines. Drones 2022, 6, 137. [Google Scholar] [CrossRef]
- Yu, X. Modelling Offshore Wind Farm Operation and Maintenance: The Benefits of Condition Monitoring; Cambridge Scholars Publishing: Cambridge, UK, 2019. [Google Scholar]
- Costa, Á.M.; Orosa, J.A.; Vergara, D.; Fernández-Arias, P. New Tendencies in Wind Energy Operation and Maintenance. Appl. Sci. 2021, 11, 1386. [Google Scholar] [CrossRef]
- Ollero, A.; Heredia, G.; Franchi, A.; Antonelli, G.; Kondak, K.; Sanfeliu, A.; Viguria, A.; Martinez-de Dios, J.R.; Pierri, F.; Cortés, J.; et al. The AEROARMS Project: Aerial Robots with Advanced Manipulation Capabilities for Inspection and Maintenance. IEEE Robot. Autom. Mag. 2018, 25, 12–23. [Google Scholar] [CrossRef] [Green Version]
- Hricko, J.; Havlik, S. Exchange of effectors for small mobile robots and UAV. Mech. Mach. Sci. 2019, 67, 308–315. [Google Scholar]
- Endrerud, O.E.V.; Liyanage, J.P.; Keseric, N. Marine Logistics Decision Support for Operation and Maintenance of Offshore Wind Parks with a Multi Method Simulation Model. In Proceedings of the Winter Simulation Conference, Huntington Beach, CA, USA, 6–9 December 2015; pp. 1712–1722. [Google Scholar] [CrossRef]
- Dai, L.; Stålhane, M.; Utne, I. Routing and Scheduling of Maintenance Fleet for Offshore Wind Farms. Wind. Eng. 2015, 39, 15–30. [Google Scholar] [CrossRef]
- Udo, W.; Muhammad, Y. Data-Driven Predictive Maintenance of Wind Turbine Based on SCADA Data. IEEE Access 2021, 9, 162370–162388. [Google Scholar] [CrossRef]
- Pandit, R.K.; Astolfi, D.; Cardenas, I.D. A Review of Predictive Techniques Used to Support Decision Making for Maintenance Operations of Wind Turbines. Energies 2023, 16, 1654. [Google Scholar] [CrossRef]
- Neves-Moreira, F.; Veldman, J.; Teunter, R.H. Service operation vessels for offshore wind farm maintenance: Optimal stock levels. Renew. Sustain. Energy Rev. 2021, 146, 111158. [Google Scholar] [CrossRef]
- Zhu, W.; Castanier, B.; Bettayeb, B. A dynamic programming-based maintenance model of offshore wind turbine considering logistic delay and weather condition. Reliab. Eng. Syst. Saf. 2019, 190, 106512. [Google Scholar] [CrossRef]
- Radzki, G.; Bocewicz, G.; Banaszak, Z. Proactive-Reactive Approach to Disruption-Driven UAV Routing Problem; Springer: Cham, Switzerland, 2023; pp. 51–61. [Google Scholar] [CrossRef]
- Thibbotuwawa, A.; Bocewicz, G.; Radzki, G.; Nielsen, P.; Banaszak, Z. UAV mission planning resistant to weather uncertainty. Sensors 2020, 20, 515. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Chen, J.; Wang, F.; Bai, M. Ground-vehicle and unmanned-aerial-vehicle routing problems from two-echelon scheme perspective: A review. Eur. J. Oper. Res. 2021, 294, 1078–1095. [Google Scholar] [CrossRef]
- Boysen, N.; Briskorn, D.; Fedtke, S.; Schwerdfeger, S. Drone delivery from trucks: Drone scheduling for given truck routes. Networks 2018, 72, 506–527. [Google Scholar] [CrossRef]
- Campbell, J.F.; Sweeney, D.C.; Zhang, J. Strategic Design for Delivery with Trucks and Drones. 2017. Available online: https://www.researchgate.net/publication/316169890_Strategic_Design_for_Delivery_with_Trucks_and_Drones (accessed on 3 July 2023).
- Chang, Y.S.; Lee, H.J. Optimal delivery routing with wider drone-delivery areas along a shorter truck-route. Expert Syst. Appl. 2018, 104, 307–317. [Google Scholar] [CrossRef]
- Das, D.N.; Sewani, R.; Wang, J.; Tiwari, M.K. Synchronized Truck and Drone Routing in Package Delivery Logistics. IEEE Trans. Intell. Transp. Syst. 2021, 22, 5772–5782. [Google Scholar] [CrossRef]
- Bocewicz, G.; Nielsen, P.; Banaszak, Z.; Thibbotuwawa, A. A declarative modelling framework for routing of multiple UAVs in a system with mobile battery swapping stations. Adv. Intell. Syst. Comput. 2019, 835, 429–441. [Google Scholar]
- Radoglou-Grammatikis, P.; Sarigiannidis, P.; Lagkas, T.; Moscholios, I. A compilation of UAV applications for precision agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar] [CrossRef]
- Nikhil, N.; Shreyas, S.M.; Vyshnavi, G.; Yadav, S. Unmanned Aerial Vehicles (UAV) in Disaster Management Applications. In Proceedings of the 3rd International Conference on Smart Systems and Inventive Technology, ICSSIT 2020, Tirunelveli, India, 20–22 August 2020; pp. 140–148. [Google Scholar] [CrossRef]
- Savva, A.; Zacharia, A.; Makrigiorgis, R.; Anastasiou, A.; Kyrkou, C.; Kolios, P.; Panayiotou, C.; Theocharides, T. ICARUS: Automatic Autonomous Power Infrastructure Inspection with UAVs. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems, ICUAS 2021, Athens, Greece, 15–18 June 2021; pp. 918–926. [Google Scholar] [CrossRef]
- Lu, F.; Feng, W.; Gao, M.; Bi, H.; Wang, S. Corrigendum: The Fourth-Party Logistics Routing Problem Using Ant Colony System-Improved Grey Wolf Optimization. J. Adv. Transp. 2022, 2022, 9864064. [Google Scholar] [CrossRef]
- Ni, J.; Tang, J.; Wang, R. Hybrid Algorithm of Improved Beetle Antenna Search and Artificial Fish Swarm. Appl. Sci. 2022, 12, 13044. [Google Scholar] [CrossRef]
- Hou, Y.; Gao, H.; Wang, Z.; Du, C. Improved Grey Wolf Optimization Algorithm and Application. Sensors 2022, 22, 3810. [Google Scholar] [CrossRef] [PubMed]
- Hao, Z.; Zhang, H.; Zhang, Y. Stock Portfolio Management by Using Fuzzy Ensemble Deep Reinforcement Learning Algorithm. J. Risk Financ. Manag. 2023, 16, 201. [Google Scholar] [CrossRef]
- Praseeda, C.K.; Shivakumar, B.L. Fuzzy particle swarm optimization (FPSO) based feature selection and hybrid kernel distance based possibilistic fuzzy local information C-means (HKD-PFLICM) clustering for churn prediction in telecom industry. SN Appl. Sci. 2021, 3, 1–18. [Google Scholar]
- Tian, D.P.; Li, N.Q. Fuzzy Particle Swarm Optimization Algorithm. In Proceedings of the IJCAI International Joint Conference on Artificial Intelligence, Pasadena, CA, USA, 11–17 July 2009; pp. 263–267. [Google Scholar] [CrossRef]
- Askari, S. Fuzzy C-Means clustering algorithm for data with unequal cluster sizes and contaminated with noise and outliers: Review and development. Expert Syst. Appl. 2021, 165, 113856. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, L.; Guo, Y. A Declarative Approach for Modeling Logistics Service Processes. In Proceedings of the 2nd International Conference on Logistics, Informatics and Service Science, Beijing, China, 12–15 July 2013; pp. 301–307. [Google Scholar]
- Ren, Z.; Verma, A.S.; Li, Y.; Teuwen, J.J.E.; Jiang, Z. Offshore wind turbine operations and maintenance: A state-of-the-art review. Renew. Sustain. Energy Rev. 2021, 144, 110886. [Google Scholar] [CrossRef]
- Grzegorz, R.; Grzegorz, B.; Bogdan, D.; Zbigniew, B. Reactive Planning-Driven Approach to Online UAVs Mission Rerouting and Rescheduling. Appl. Sci. 2021, 11, 8898. [Google Scholar] [CrossRef]
- Radzki, G.; Nielsen, I.; Golińska-dawson, P.; Bocewicz, G.; Banaszak, Z. Reactive UAV fleet’s mission planning in highly dynamic and unpredictable environments. Sustainability 2021, 13, 5228. [Google Scholar] [CrossRef]
- Radzki, G.; Relich, M.; Bocewicz, G.; Banaszak, Z. Declarative Approach to UAVs Mission Contingency Planning in Dynamic Environments. In Distributed Computing and Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2022. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Effect on Nominal Operation Time [min] | Cost of an Employee Performing a Service Order [u.m./h] | The Cost of an Employee Waiting for a Service Order [u.m./h] | |
|---|---|---|---|
| −15 | 60 | 50 | |
| 0 | 40 | 30 | |
| 15 | 20 | 10 |
| UAV | Max Speed [m/s] | Weight Capacity [kg] | Load/Unload Time [min] | Cost [u.m./h] |
|---|---|---|---|---|
| 16 | 120 | 10 | 50 |
| Effect on Nominal Operation Time [min] | Cost of an Employee Performing a Service Order [u.m./h] | The Cost of an Employee Waiting for a Service Order [u.m./h] | |
|---|---|---|---|
| 0 | 40 | 30 | |
| 0 | 40 | 30 | |
| 0 | 40 | 30 |
| No. of Service Teams | Mission Duration MD [min] | Acceptable Solution MD ≤ 420 | Mission Cost C [u.m.] | Sum of Service Team’s Wait Times [min] |
|---|---|---|---|---|
| 1 | 734 | NO | 1174 | 0 |
| 2 | 457 | NO | 1448 | 140 |
| 3 | 466 | NO | 1618 | 222 |
| 4 | 420 | YES | 1817 | 289 |
| 5 | 394 | YES | 1952 | 512 |
| No. of Service Teams | No. of WTs | TC [s] | No. of Service Teams | No. of WTs | TC [s] |
|---|---|---|---|---|---|
| 1 | 5 | 1.83 | 2 | 5 | 2.45 |
| 1 | 6 | 3.03 | 2 | 6 | 6.03 |
| 1 | 7 | 19.08 | 2 | 7 | 93.79 |
| 1 | 8 | 35.22 | 2 | 8 | 123.35 |
| 1 | 9 | 82.45 | 2 | 9 | 245.56 |
| 1 | 10 | 151.69 | 2 | 10 | 368.00 |
| 1 | 11 | 342.12 | 2 | 11 | 690.50 |
| 1 | 12 | 498.45 | 2 | 12 | 1104.36 |
| No. of Service Teams | No. of WTs | TC [s] | No. of Service Teams | No. of WTs | TC [s] |
| 3 | 5 | 3.43 | 4 | 5 | 4.17 |
| 3 | 6 | 9.13 | 4 | 6 | 14.89 |
| 3 | 7 | 135.26 | 4 | 7 | 152.76 |
| 3 | 8 | 173.98 | 4 | 8 | 237.01 |
| 3 | 9 | 311.24 | 4 | 9 | 414.45 |
| 3 | 10 | 425.12 | 4 | 10 | 721.12 |
| 3 | 11 | 889.56 | 4 | 11 | 1690.87 |
| 3 | 12 | 1758.99 | 4 | 12 | 3577.40 |
| No. of Service Teams | No. of WTs | TC [s] | |||
| 5 | 5 | 4.98 | |||
| 5 | 6 | 15.39 | |||
| 5 | 7 | 211.02 | |||
| 5 | 8 | 383.07 | |||
| 5 | 9 | 537.81 | |||
| 5 | 10 | 1178.39 | |||
| 5 | 11 | 3169.82 | |||
| 5 | 12 | >3600 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Banaszak, Z.; Radzki, G.; Nielsen, I.; Frederiksen, R.; Bocewicz, G. Proactive Mission Planning of Unmanned Aerial Vehicle Fleets Used in Offshore Wind Farm Maintenance. Appl. Sci. 2023, 13, 8449. https://doi.org/10.3390/app13148449
Banaszak Z, Radzki G, Nielsen I, Frederiksen R, Bocewicz G. Proactive Mission Planning of Unmanned Aerial Vehicle Fleets Used in Offshore Wind Farm Maintenance. Applied Sciences. 2023; 13(14):8449. https://doi.org/10.3390/app13148449
Chicago/Turabian StyleBanaszak, Zbigniew, Grzegorz Radzki, Izabela Nielsen, Rasmus Frederiksen, and Grzegorz Bocewicz. 2023. "Proactive Mission Planning of Unmanned Aerial Vehicle Fleets Used in Offshore Wind Farm Maintenance" Applied Sciences 13, no. 14: 8449. https://doi.org/10.3390/app13148449