
The Teaching Application of the Backward Design Method in Chinese National Undergraduate Engineering Training Integration Ability Competition: Take the Double 8 Carbon-Free Car as an Example

Abstract
:1. Introduction
2. Materials and Methods
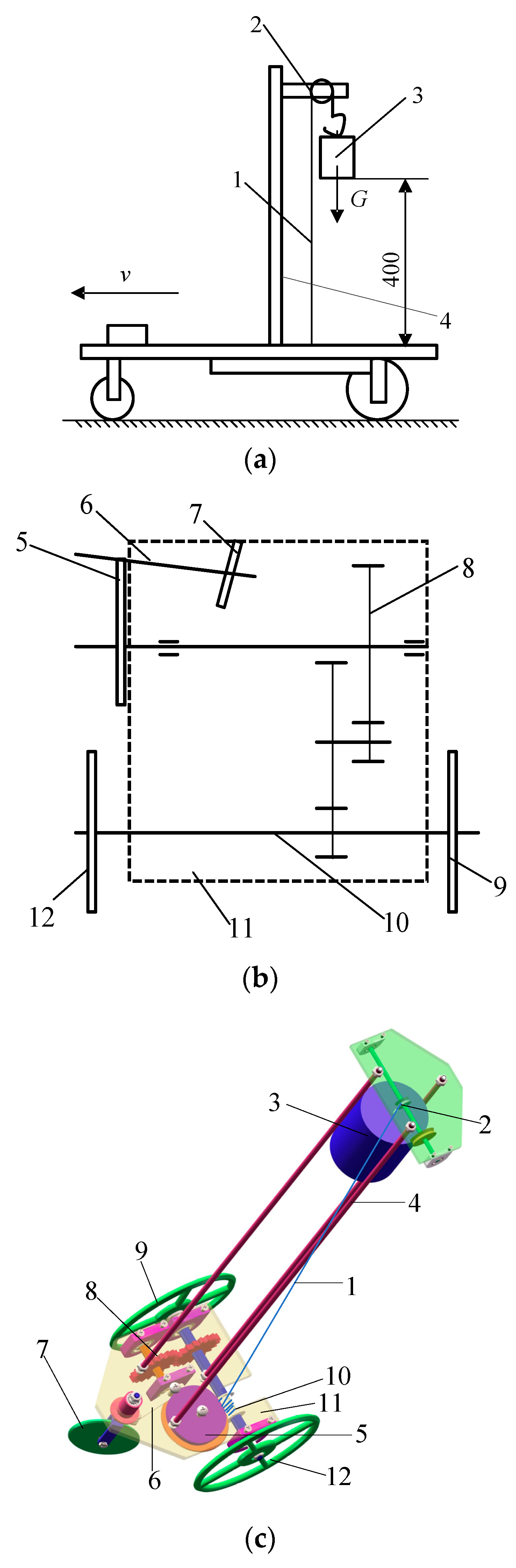
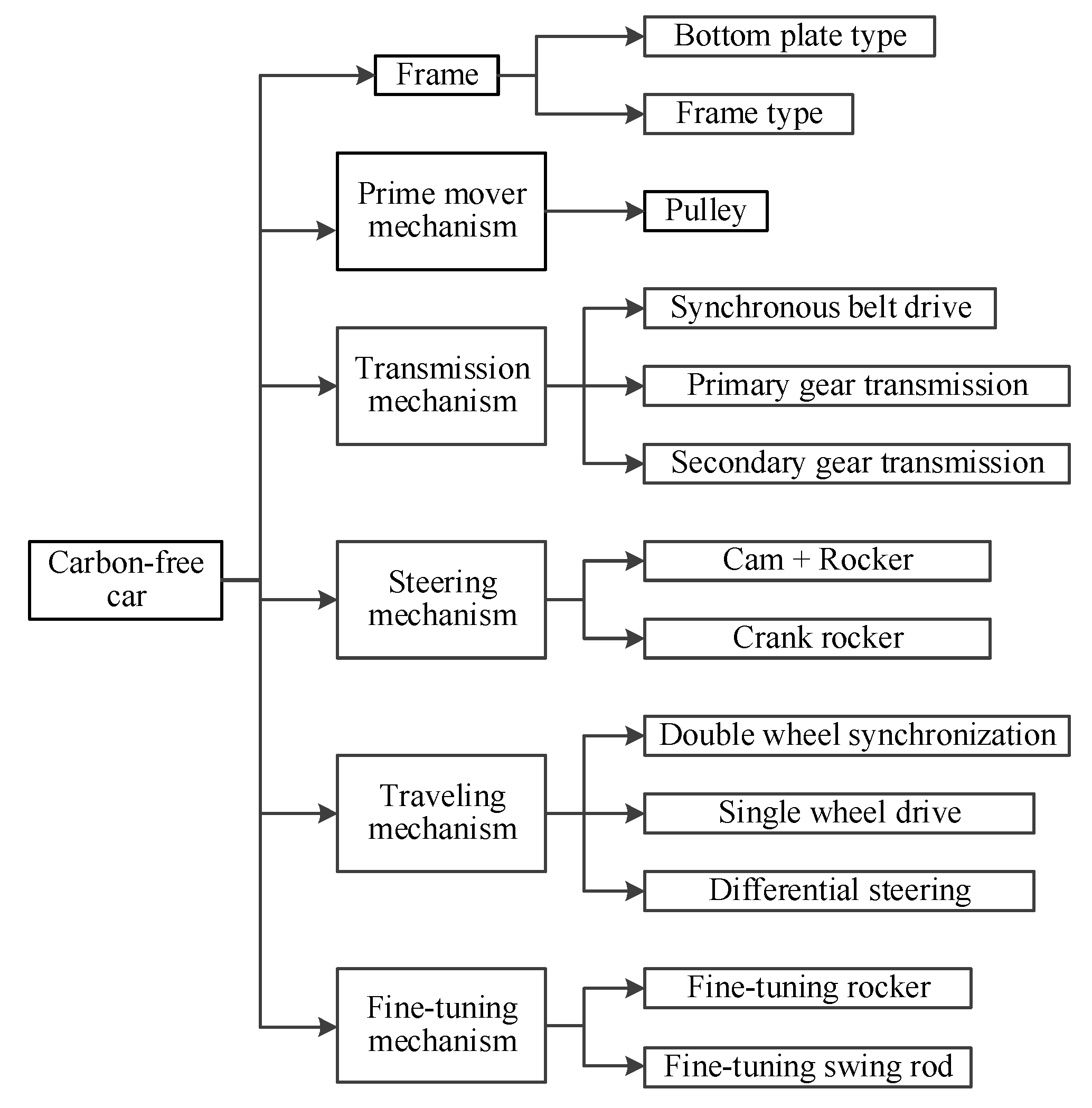
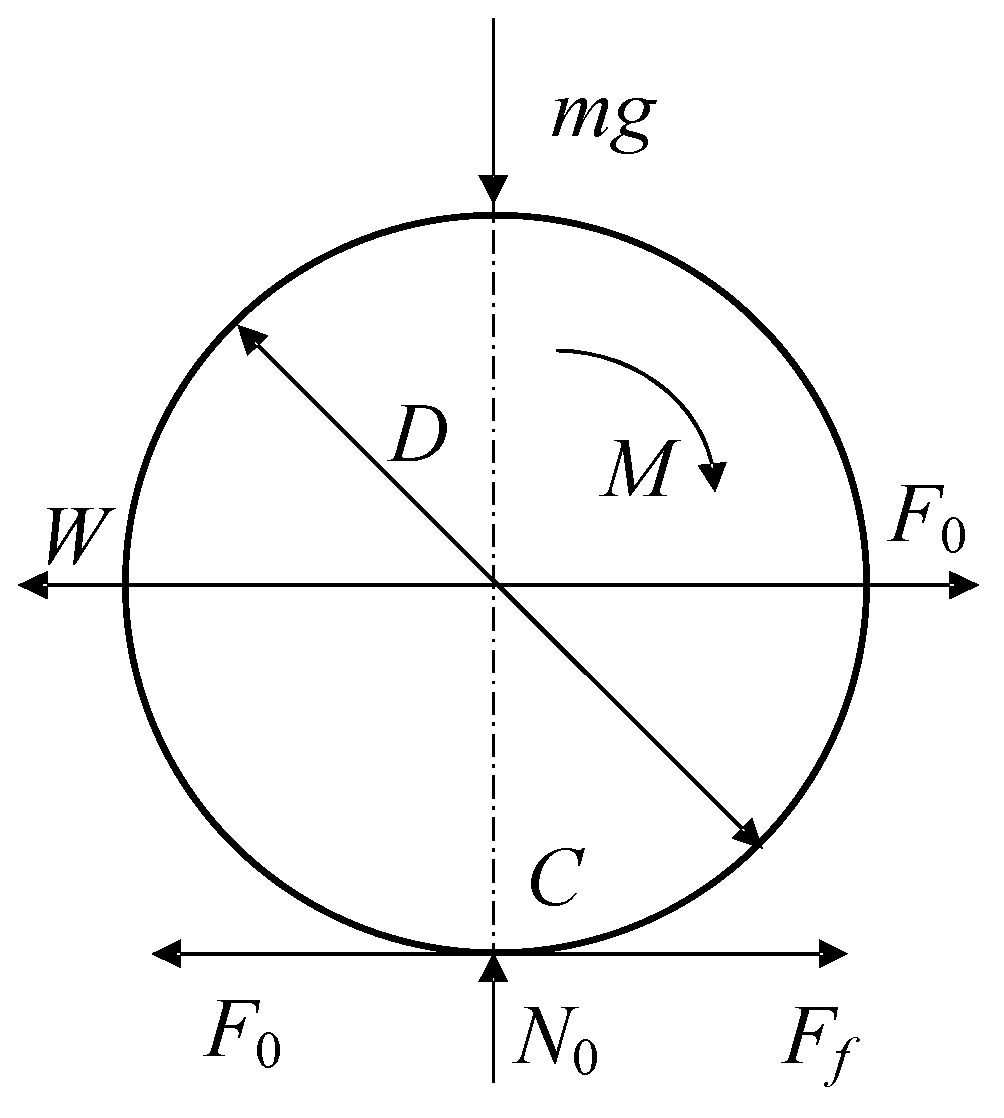
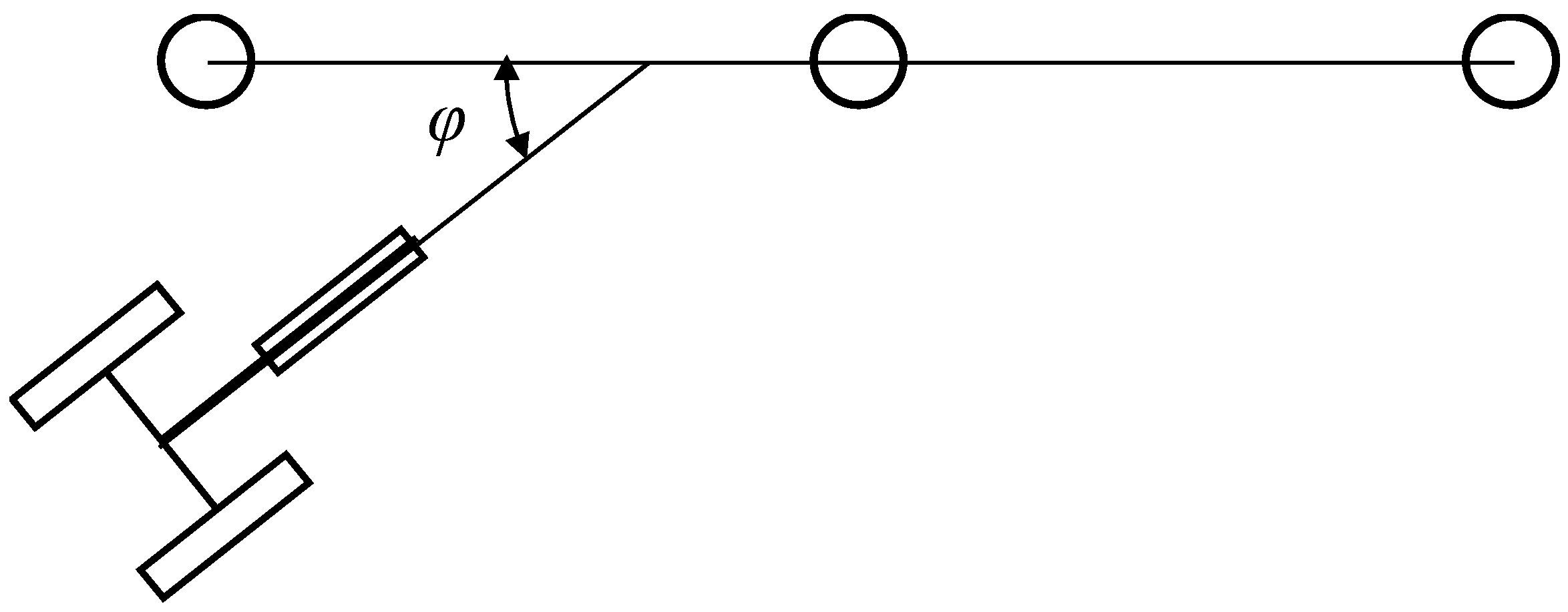
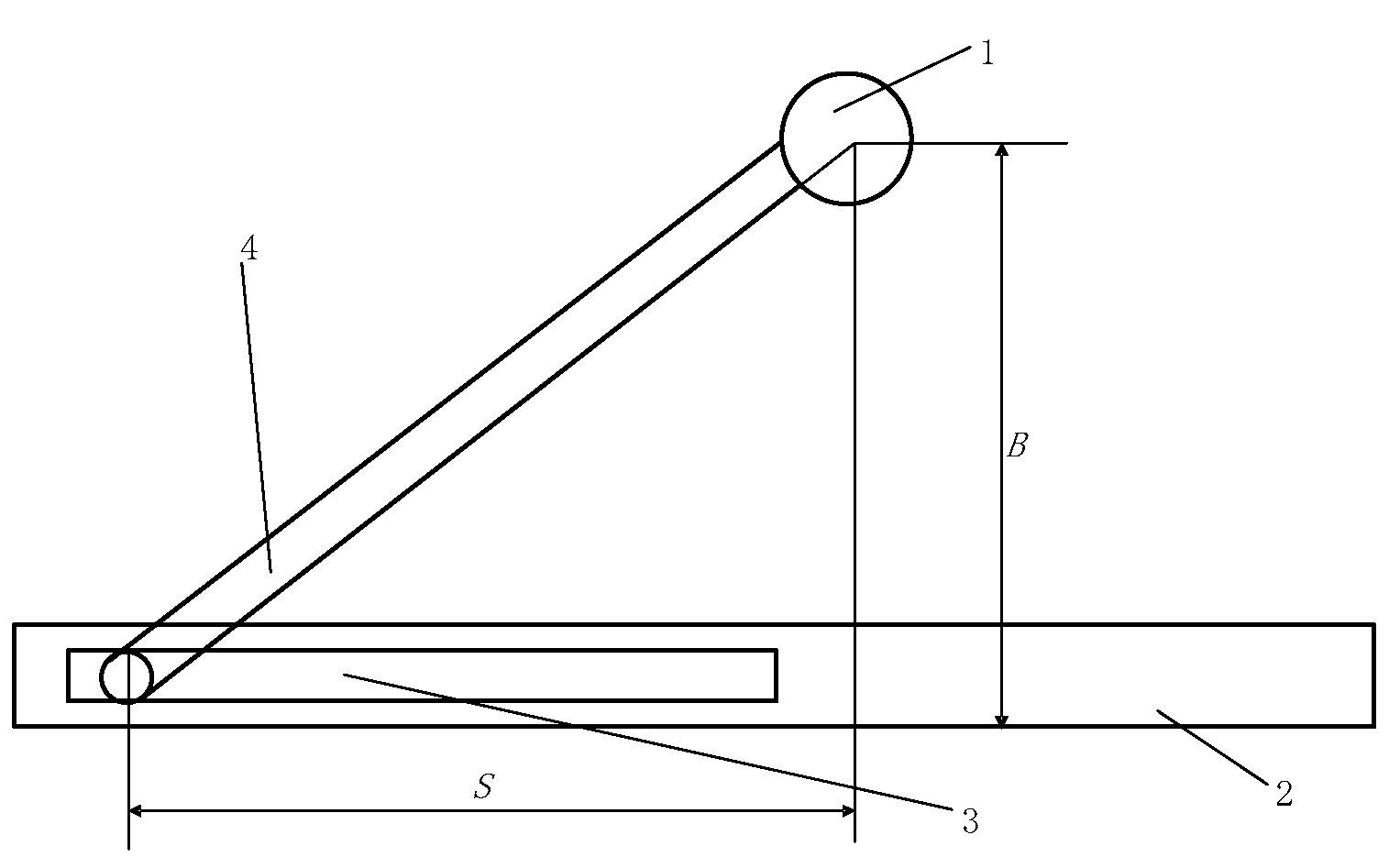
3. Overall Structure Design and Force Analysis
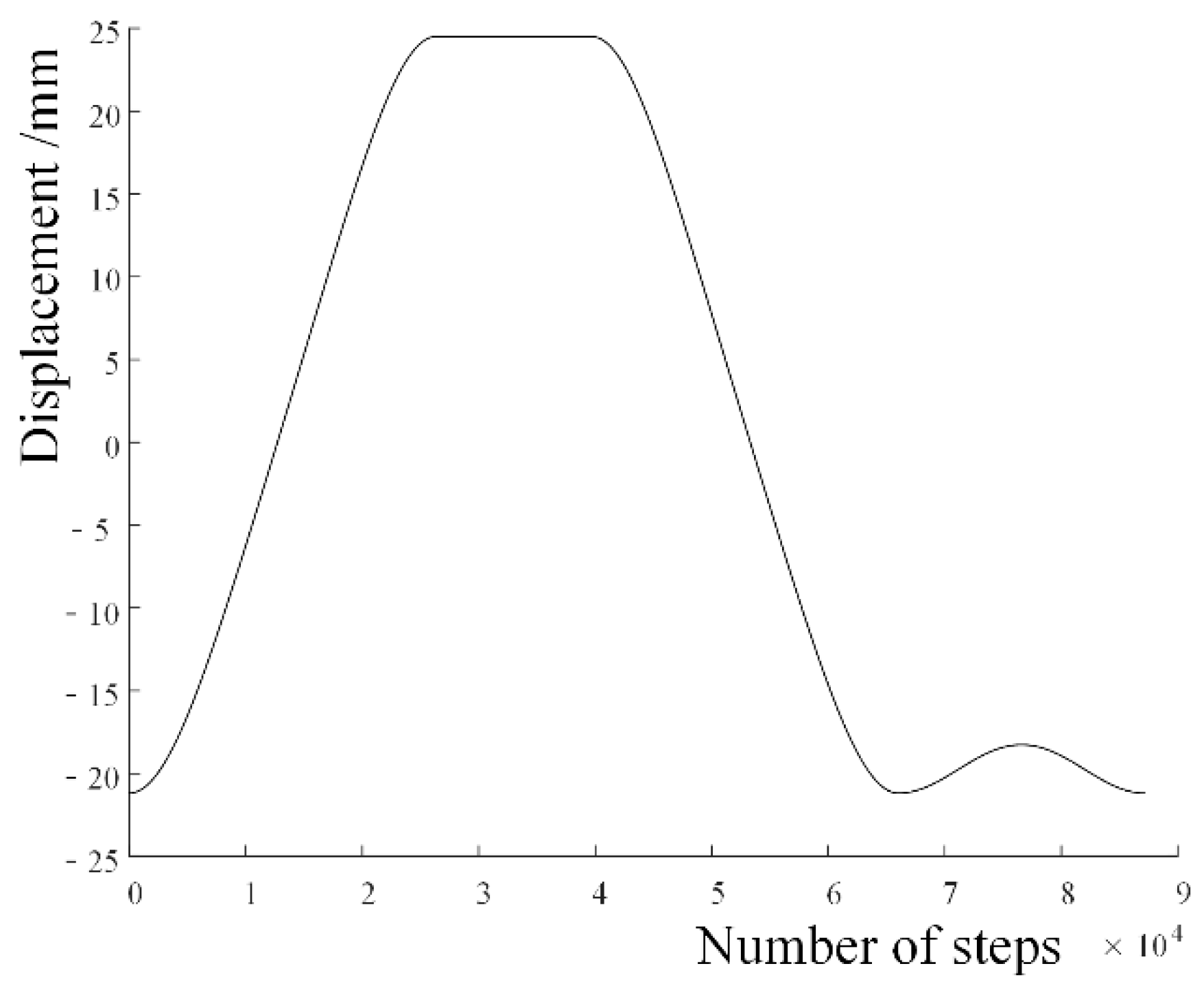
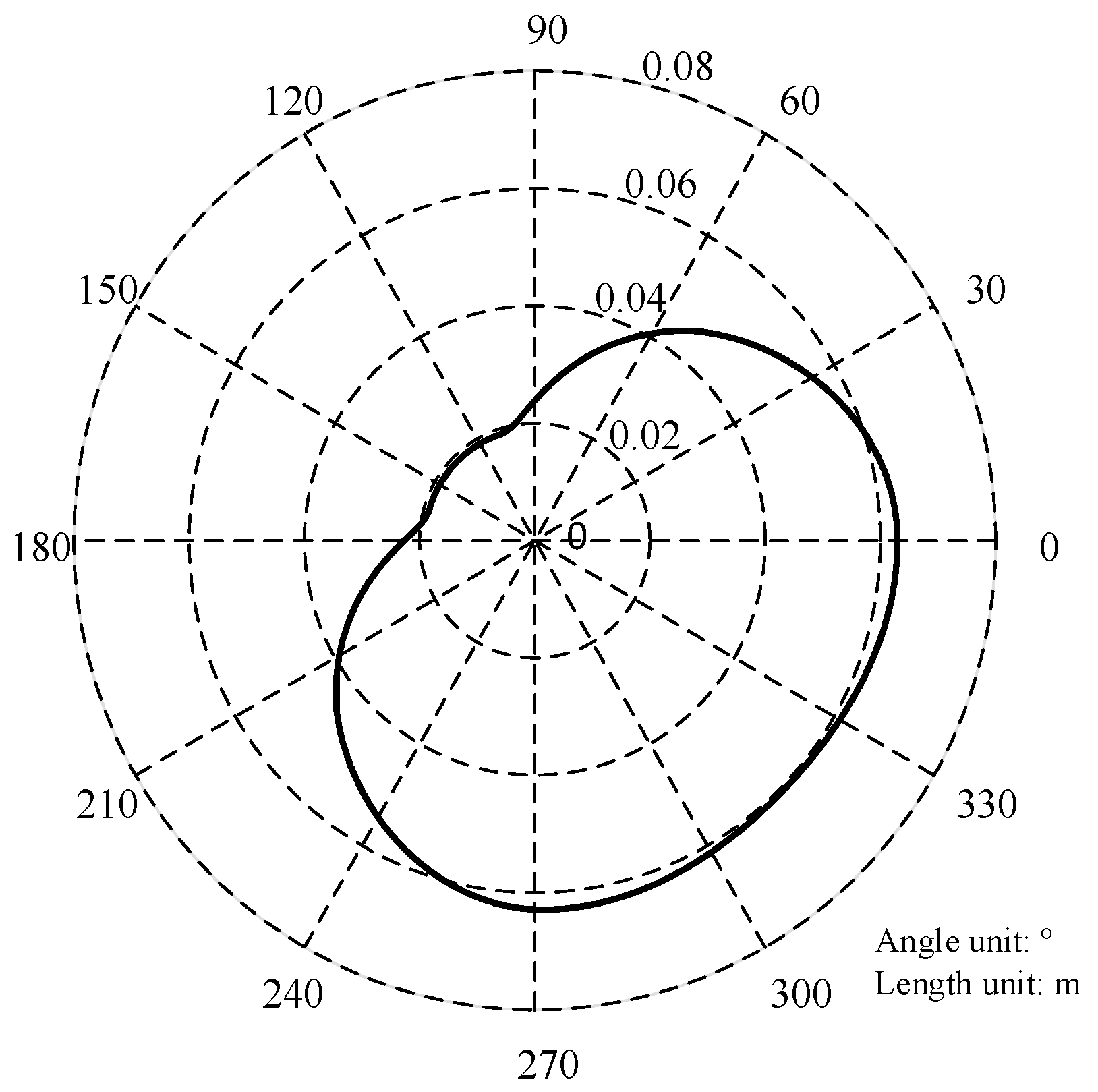
4. Cam Profile Design of the Carbon-Free Car for Double 8-Shaped Track
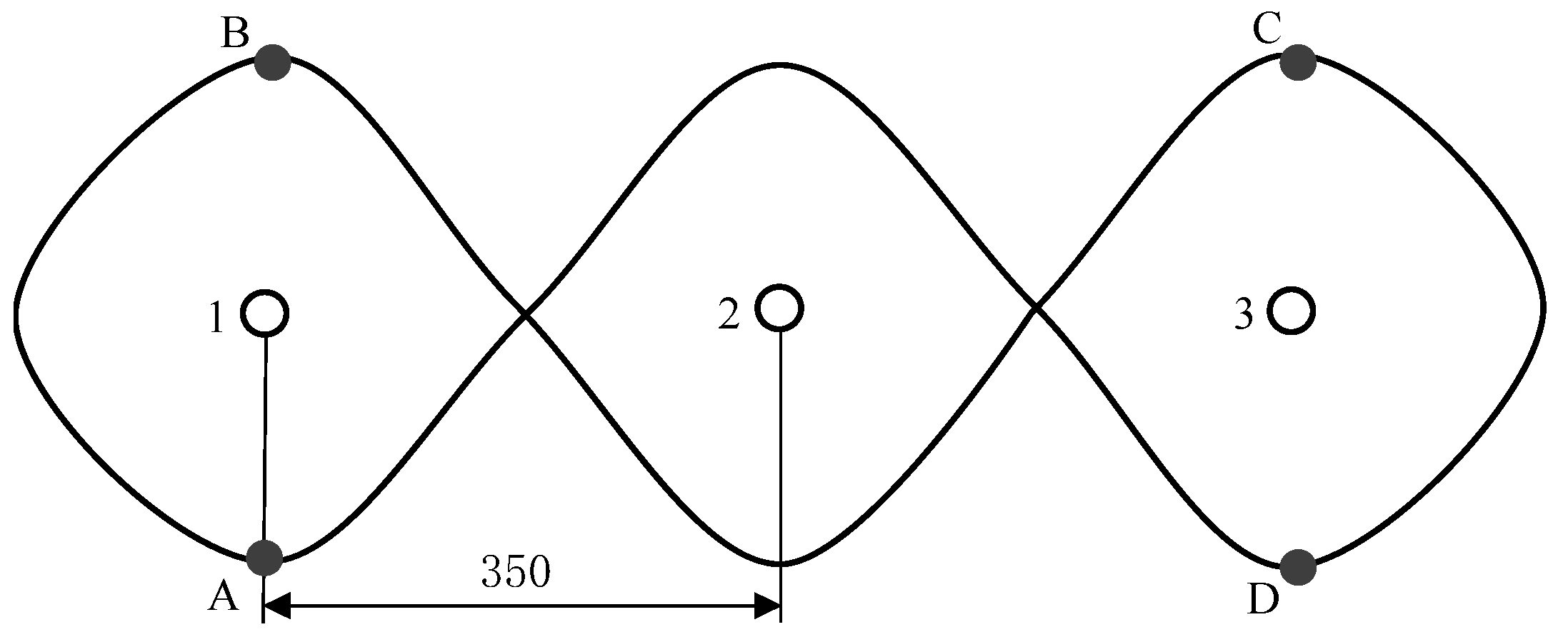
4.1. Running Track Analysis of the Carbon-Free Car
4.2. Cam Structure Design of the Carbon-Free Car
φ2 = φ1 + l1·ρ1
φ3 = φ2 + l2·ρ2
…
φ(n+1) = φn + ln·ρn
y(n+1) = yn + ln·sin φn
yc(n+1) = ycn + lcn·sin φn
yz(n+1) = yzn + lzn·sin φn
yq(n+1) = yqn + lqn·sin (φn + θn)
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, Y.F.; Xia, Y.L.; Liang, Z.H.; Chen, L.; Li, X.B. Track simulation and structural design of the double 8-typed carbon-free car based on MATLAB. J. Mach. Des. 2020, 37, 8–13. [Google Scholar]
- Wang, D.W.; Hou, J.H.; Guo, C.Y.; Shen, X.P.; Zhu, Y.P. Design of double 8-typed obstacle-avoiding carbonless car based on the RSSR mechanism. J. Mach. Des. 2020, 37, 20–26. [Google Scholar]
- Han, S.K.; Jie, M.Y.; Lin, C.X.; Zhang, S.J. The Key Structure Design and System of “Double 8 -Shaped” Trajectory Carbon-Free Car. Mach. Des. Manuf. 2019, 43, 60–64. [Google Scholar]
- Zeng, D.H.; Zhang, D. Double 8-shaped carbon-free car based on cam control. Machinery 2020, 58, 58–62. [Google Scholar]
- Zhang, K.Q.; Xiu, F.Y.; Zhang, Y.; Su, L.; Yang, X.J. Design of double 8-shaped trajectory carbon-free car based on cam mechanism. J. Mach. Des. 2020, 37, 24–28. [Google Scholar]
- He, R.H.; Xiao, J.C.; Du, K.Q.; Yue, J.H.; Lan, M.H. Structural Design and Analysis of S-Ring Carbon-Free Cars. J. Mach. Des. 2023, 40, 48–54. [Google Scholar]
- Li, J. Universal Design Method of Carbon-free Car Based on 3D Motion Simulation. Mach. Des. Res. 2022, 38, 46–48+52. [Google Scholar]
- Huang, H.L.; Zhu, H. Design of carbon-free car on S-shaped circular track based on cam mechanism. Exp. Technol. Manag. 2023, 40, 136–140. [Google Scholar]
- Sun, G.X.; Zhou, X.S.; Qiao, G.B.; Xu, Z.R. CAM mechanism and its design method for the “double 8” trajectory. J. Mach. Des. 2019, 36, 30–35. [Google Scholar]
- Zhong, Z.R.; Wan, J.G.; Zhu, W.H. Error Analysis and Optimization for Carbon-Free Car. Mach. Des. Manuf. 2022, 380, 246–250. [Google Scholar]
- Xu, H.Z.; Jiao, H.B.; Liu, J.D.; Niu, Z.H. Reverse design and analysis of gear five-bar planting mechanism based on agronomic requirement. Pak. J. Agric. Sci. 2022, 59, 329–337. [Google Scholar]
- Zhang, Y.L.; Tian, S.; Yao, Y.F. The Structural Design and Trajectory Analysis of Double “8” Carbon-free Dolly. J. Xi’an Univ. (Nat. Sci. Ed.) 2020, 23, 24–29. [Google Scholar]
- Ai, X.J.; Wang, C.H.; Su, L.; Zhao, L.M. Design for Gravity-Driven and Direction-Control Carbon-Free Vehicle. Mach. Des. Manuf. 2016, 54, 157–160. [Google Scholar]
- Wang, X.N.; Zhou, H. Design and Simulation of carbon-free car with double 8-shaped track. Intern. Combust. Engine Parts 2019, 118–121. [Google Scholar]
- Zhou, C.; Gao, K.S.; Ju, C.M.; Zhang, Y.L. Dynamic Simulation of Carbon-Free Caron ADAMS. Mach. Des. Manuf. 2015, 8, 197–199+205. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| University | Distance between Front and Rear Axles A/mm | Driving Wheel Offset eL/mm |
|---|---|---|
| Jiangsu University | 111.5 | 68 |
| Northeast Forestry University | 115 | 73 |
| Shenyang Agricultural University | 113.5 | 67 |
| Changchun University of Technology | 113 | 71 |
| Taiyuan University of Technology | 112 | 65 |
| Key Parameters of the Carbon-Free Car | Symbol |
|---|---|
| Front-wheel swing angle | θ |
| Body swing angle | φ |
| Distance between front and rear axles | A |
| Driving wheel offset | eL |
| Driven wheel offset | eL′ |
| Distance between nodes (Step distance) | LT |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, X.; Wang, X.; Zhang, H.; Li, H. The Teaching Application of the Backward Design Method in Chinese National Undergraduate Engineering Training Integration Ability Competition: Take the Double 8 Carbon-Free Car as an Example. Appl. Sci. 2023, 13, 8829. https://doi.org/10.3390/app13158829
Ma X, Wang X, Zhang H, Li H. The Teaching Application of the Backward Design Method in Chinese National Undergraduate Engineering Training Integration Ability Competition: Take the Double 8 Carbon-Free Car as an Example. Applied Sciences. 2023; 13(15):8829. https://doi.org/10.3390/app13158829
Chicago/Turabian StyleMa, Xueting, Xufeng Wang, Hong Zhang, and Hong Li. 2023. "The Teaching Application of the Backward Design Method in Chinese National Undergraduate Engineering Training Integration Ability Competition: Take the Double 8 Carbon-Free Car as an Example" Applied Sciences 13, no. 15: 8829. https://doi.org/10.3390/app13158829