
Actuation Mechanisms and Applications for Soft Robots: A Comprehensive Review


Abstract
:1. Introduction
- (i)
- The actuation materials and mechanisms of soft robots are summarised according to seven categories, i.e., SMA, fluid, EAP, electric and magnetic, light, sound, and chemical;
- (ii)
- Furthermore, according to the progress of soft robots in recent years, extra categories, including SMA-based wire, spring design, origami-based pneumatic, and dielectric elastomer actuator (part of EAP), are also summed up;
- (iii)
- The actuations of soft robotics under the above categories are reviewed in terms of characteristics, mechanisms, and typical structures. The advantages and disadvantages of the categories are analysed quantitatively and qualitatively;
- (iv)
- In addition, challenges for the future development of soft robots are put forward to bring more insights to practitioners and researchers.
2. Actuation Materials and Mechanisms for Soft Robots
2.1. Shape Memory Alloy (SMA)
2.1.1. SMA Spring
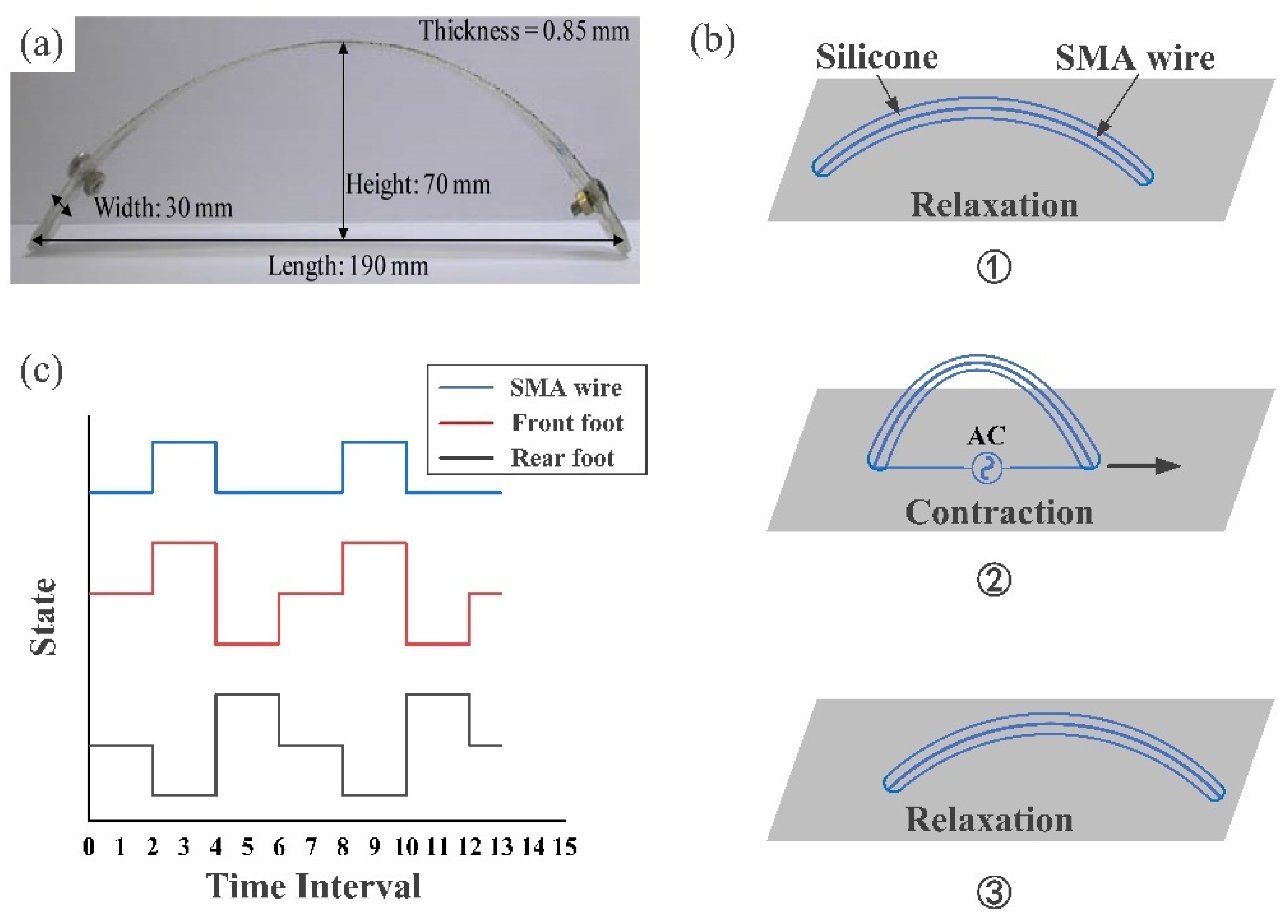
2.1.2. SMA Wire
2.2. Fluid
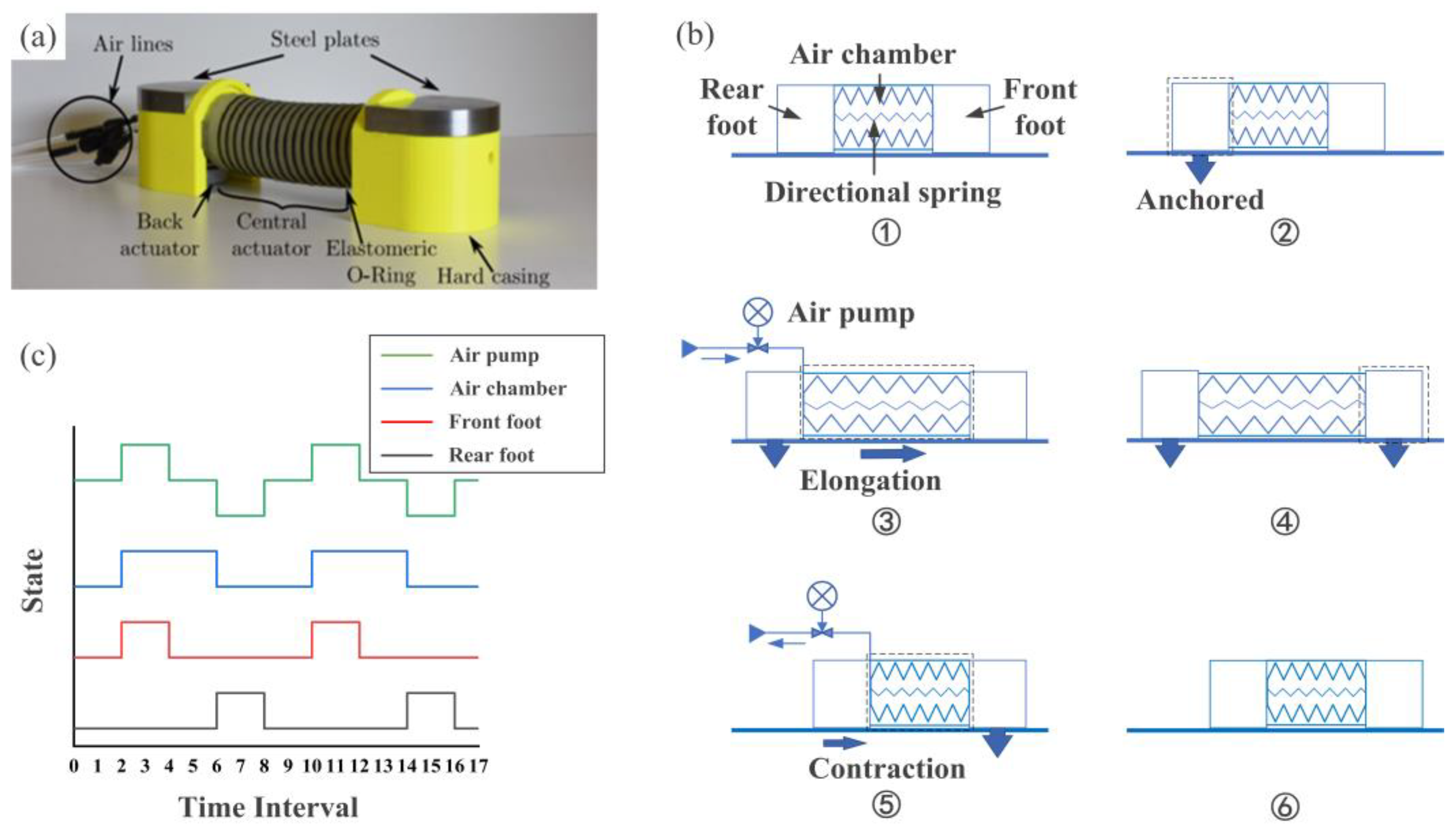
2.2.1. Pneumatic
2.2.2. Origami-Based Pneumatic
2.2.3. Hydraulic
2.2.4. Pneumatic–Hydraulic
2.3. Electroactive Polymer (EAP)
2.3.1. Dielectric Elastomer
2.3.2. Liquid Crystal Polymer
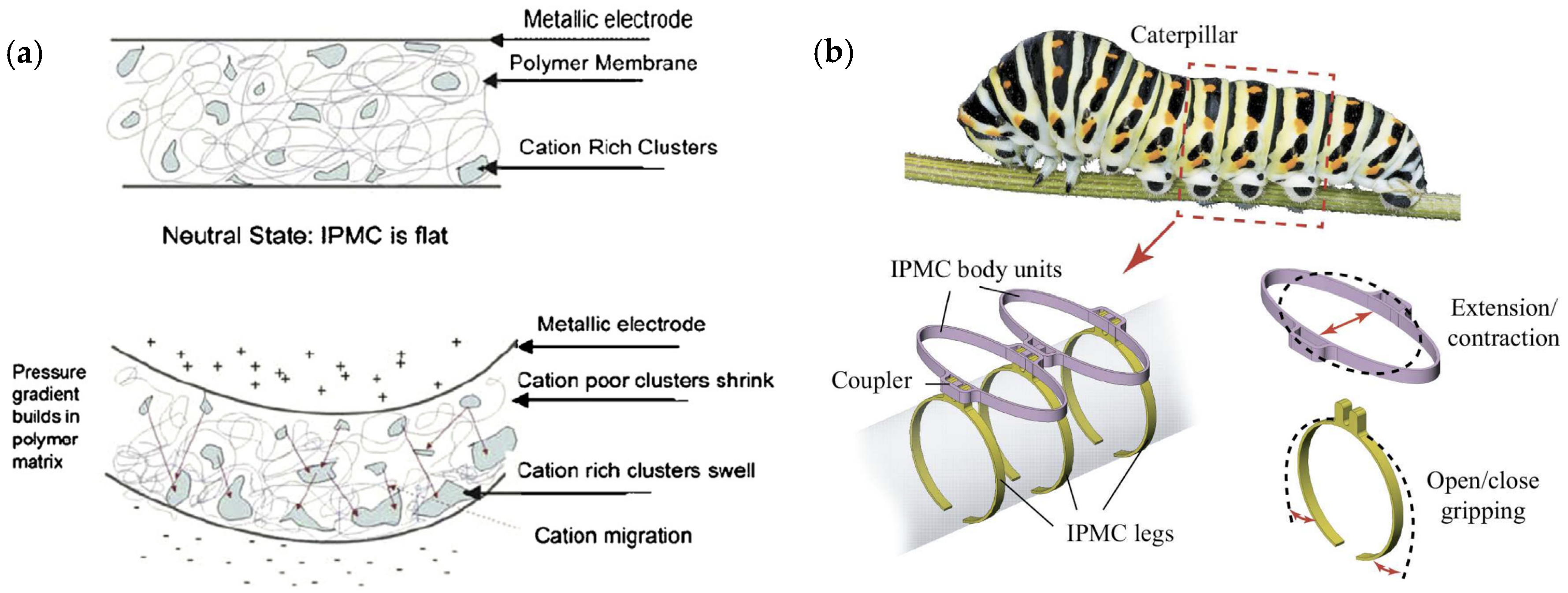
2.3.3. Ionic Polymer–Metal Composite (IPMC)
2.3.4. Ionic Gel
- (1)
- It requires a high voltage above kilovolts with high power consumption;
- (2)
- It has a slow response time, which needs much time to deform;
- (3)
- Because of the softness of these polymers, their load-bearing capacities are less than other actuations.
2.4. Electric and Magnetic
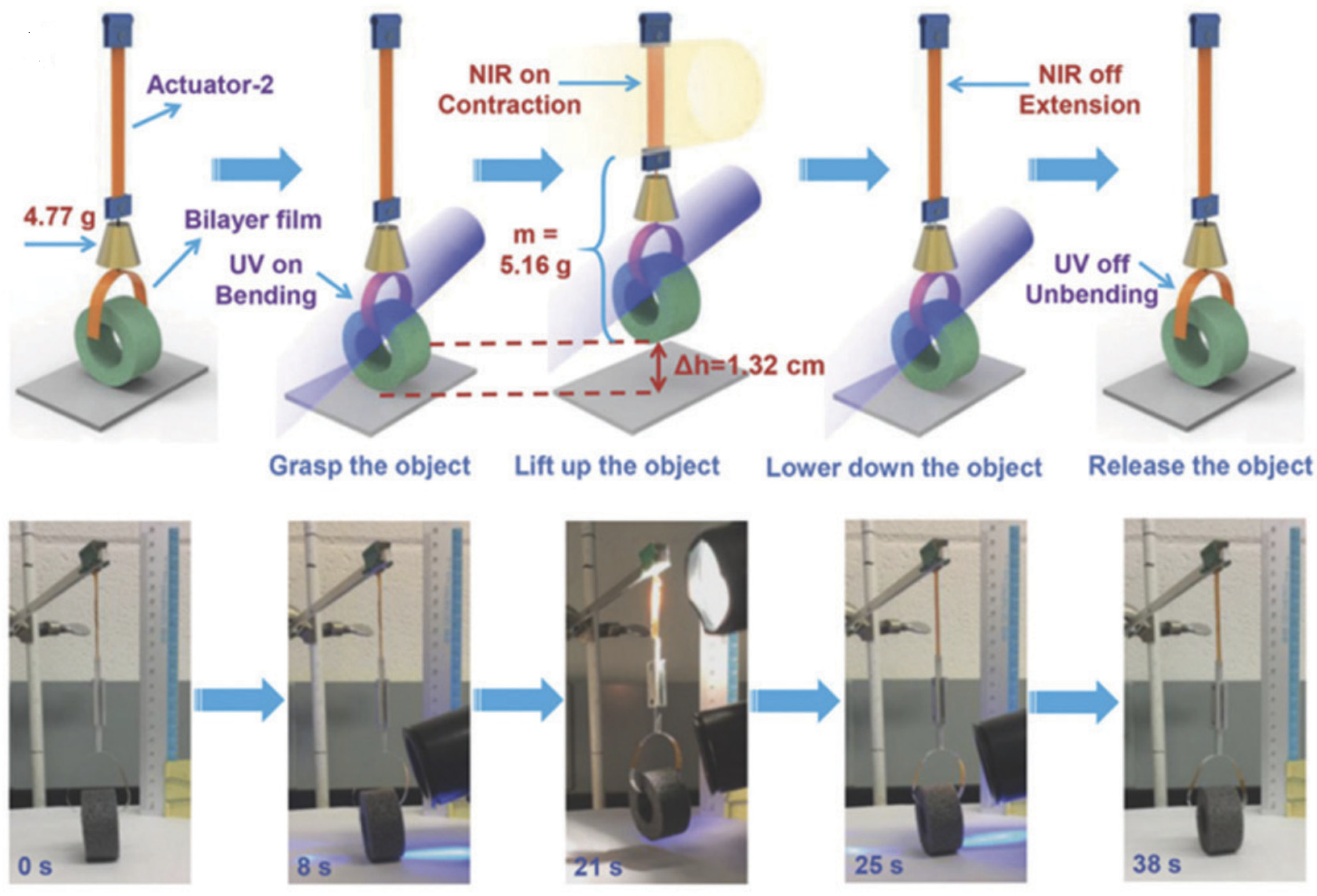
2.5. Light
2.6. Sound
2.7. Chemical
- (1)
- Chemical soft robots include reaction devices, which are difficult to miniaturise;
- (2)
- Some robots driven by explosions are designed for jumping purposes, but the positioning accuracy of the robots is not high.
3. Applications
3.1. Bionic and Motion
3.2. Medical and Rehabilitation
3.3. Control and Exploration
3.4. Industry and Production
3.5. Human–Robot Collaboration
4. Further Discussions

| Actuations | Advantages | Disadvantages | Applications |
|---|---|---|---|
| Shape Memory Alloys (SMAs) [187,188,189,190] | High thermal stability. Recoverable strain. Strong corrosion resistance. Easy to automate. Able to be additively manufactured. | Slow response. High energy consumption and low efficiency. Affected by temperature. | Aerospace, automotive, biomedicine, and robotics. |
| Fluids | Grabbing devices such as robotic hands and robotic arms. Swimming robot. | ||
| Pneumatic [191,192,193,194] | Fast response. High security. Strong flexibility. | Need external air pumps. Difficult to miniaturize. | |
| Origami-based Pneumatic [100] | Low cost. Light weight. Quick response. Able to be programmable. | Easy to be vulnerable. Low reuse rate. | |
| Hydraulic [107,195] | Good driving force. | Large weight. Complex structural elements. Inconvenient to maintain. | |
| Pneumatic-hydraulic [103] | Both pneumatic and hydraulic advantages. | Difficult to miniaturize. | |
| Electroactive polymers (EAPs) | Robot gripper. Creeping, underwater, aerial robots. Soft actuators such as artificial muscles. | ||
| Electronic [196,197,198] | High energy density. Quick response. Long operating time. Able to perceive itself. | High drive voltage. Prone to aging and failure. | |
| Ionic [10,199] | Low driving voltage. Large bending displacement. | Response time is longer than electronic. Small output force. | |
| Electric & Magnetic [200,201,202] | Automatic control. Fast response. Adapt to enclosed areas. | Large external coil that generates the magnetic field. High power consumption. Small controllable area. | Drug delivery and surgery. Robot crawling device, swimming device, and micro-pump. |
| Light [128,133] | Able to be controlled wirelessly and remotely. Easy to miniaturize. Have access to human–computer interaction. | Need high-intensity light. Low light-to-heat conversion efficiency of actuation material. | Biomedical applications, multi-modal motion of underwater robots |
| Sound [203] | Transfer energy through vibration. In-module communication. | Vulnerable to external unrequired noise. Limited mobility. | Sound monitoring, communication, and search and rescue. |
| Chemical [164,204] | High energy density. Quick response. Untethered. Greater obstacle avoidance capability. | Need to be refueled regularly. High requirements for impact resistance of materials. | Robotic movement and directional jumping. |
| Actuation | Speed (m/s) | Source of Energy | Weight (g) | Carrying Capacity (g) | Output Force | Max Displacement per Step | Dimension | Refs. | |
|---|---|---|---|---|---|---|---|---|---|
| SMARoll robot | SMA | 0.13 | <10 V DC | 191.2 | - | - | 50 mm | 100 × 50 × 8 mm3 | [53] |
| GoQBot | SMA | 0.5 | <10 V DC | 5–6.2 | - | 0.05 N | 25 cm | 100 mm (Length) | [82] |
| Inchworm robot | Fluid | 0.0022 | Air pressure | - | 50 | 0.5 N | 2 mm | 98 × 25 × 17 mm3 | [94] |
| Tube climber | Fluid | 0.006 | Air pressure | 98 | 1381 | 13.8 N | 2.4 cm | 70–90 mm (Length) | [96] |
| Jellyfish robot | Fluid and EAP | 0.009 | Gas–liquid pressure difference | 261 | 241 | 0.15 N | 18 cm | 140 mm (Height) 59 mm (Radius) | [103] |
| Annelid robot | EAP | 0.0053 | 3 kV DC | 10.3 | - | 2 MPa | 9 mm | 170 mm (Length) | [125] |
| RSR | EAP | 0.03627 | 3.2 kV DC | 0.88 | - | - | 145.09 mm | 24.83 mm (Radius) | [126] |
| Multi-material robot | Magnetic | 0.0031 | Magnetic field | 0.23 | 3 | - | 5.5 mm | 40 × 5 × 2 mm3 | [25] |
| C-Balls | Magnetic | 0.046 | Magnetic field | 30 | - | - | - | - | [180] |
| Helical robot | Magnetic | 0.01 | Magnetic field | 0.04 | - | - | 19.45 cm | 30 mm (Length) 4.5 mm (Diameter) | [182] |
| Inching robot | Light | 0.00025 | 200 mW·cm−2 (Light intensity) | - | - | - | 2.7 mm | 17 mm (Length) | [23] |
| Transporter robot | Light | 0.0005 | 150–250 mW·cm−2 (Light intensity) | 0.02 | 0.005 | 0.05 N | 4 mm | 20 mm (Span) | [133] |
| Wormbot | Sound | 0.056 | 300 mAh 7.4 V (Battery) | - | - | - | 6 mm | 160 mm (Length) 27 mm (Radius) | [162] |
| Tripedal robot | Chemical | 3.6 | Methane | - | - | 71 kPa | 30 cm | 130 mm (Length) 10 mm (Height) | [164] |
| Jumping robot | Chemical | 0.43 (Horizontal) 0.86 (Vertical) | Butane | 510 | - | 138 kPa | 0.6 m | 150 mm (Radius) 80 mm (Height) | [52] |
| Years | SMAs | Fluids | EAPs | |
|---|---|---|---|---|
| 2006 |  | Earthworm robot [77] | Swimming robot [139] | |
| 2007 | Jellyfish microrobot [205] | Annelid robot [123] | ||
| 2008 | Six-legged robot [206] | Robotic eye [207] | ||
| 2009 | Omegabot [29] | Miniature soft hand [208] | Jellyfish robot [140] | |
| 2010 | GoQBot [82] | Tankbot [145] | ||
| 2011 | ∩-shaped robot [80] | Multigait soft robot [209] | ||
| 2012 | Grasping hand [210] | |||
| 2013 | Meshworm [211] | Snake robot [27] | Folding robot [212] | |
| 2014 | Starfish robot [213] | Micro inchworm robot [101] | Quadruped robot [124] | |
| 2015 | Robotic hand [83] | Oral robot [170] | Aligned fibers robot [166] | |
| 2016 | Soft morphing hand [214] | Tube-climbing robot [96] | Versatile soft grippers [196] | |
| 2017 | Curved gripper [215] | Self-healing robot [95] | Electronic fish [197] | |
| 2018 | Gecko-inspired gripper [216] | Caterpillar robot [217] | Feedback control robot [218] | |
| 2019 | Spherical robot [79] | Soft robotic manipulator [219] | Millimetre-scale snail robot [131] | |
| 2020 | RoBeetle [86] | Balloon-type robot [99] | Capsule underwater robot [141] |
5. Conclusions and Outlook
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cianchetti, M.; Laschi, C.; Menciassi, A.; Dario, P. Biomedical applications of soft robotics. Nat. Rev. Mater. 2018, 3, 143–153. [Google Scholar] [CrossRef]
- Hann, S.Y.; Cui, H.; Nowicki, M.; Zhang, L.G. 4D printing soft robotics for biomedical applications. Addit. Manuf. 2020, 36, 101567. [Google Scholar] [CrossRef]
- Zhang, Y.; Lu, M. A review of recent advancements in soft and flexible robots for medical applications. Int. J. Med. Robot. Comput. Assist. Surg. 2020, 16, e2096. [Google Scholar] [CrossRef] [PubMed]
- Whitesides, G.M. Soft Robotics. Angew. Chem. Int. Ed. 2018, 57, 4258–4273. [Google Scholar] [CrossRef]
- Wallin, T.J.; Pikul, J.; Shepherd, R.F. 3D printing of soft robotic systems. Nat. Rev. Mater. 2018, 3, 84–100. [Google Scholar] [CrossRef]
- Zolfagharian, A.; Kaynak, A.; Kouzani, A. Closed-loop 4D-printed soft robots. Mater. Des. 2020, 188, 108411. [Google Scholar] [CrossRef]
- Elango, N.; Faudzi, A.A.M. A review article: Investigations on soft materials for soft robot manipulations. Int. J. Adv. Manuf. Technol. 2015, 80, 1027–1037. [Google Scholar] [CrossRef] [Green Version]
- Hines, L.; Petersen, K.H.; Lum, G.Z.; Sitti, M. Soft Actuators for Small-Scale Robotics. Adv. Mater. 2017, 29, 1603483. [Google Scholar] [CrossRef]
- Du, X.; Cui, H.; Xu, T.; Huang, C.; Wang, Y.; Zhao, Q.; Xu, Y.; Wu, X. Reconfiguration, Camouflage, and Color-Shifting for Bioinspired Adaptive Hydrogel-Based Millirobots. Adv. Funct. Mater. 2020, 30, 1909202. [Google Scholar] [CrossRef]
- Marchese, A.D.; Katzschmann, R.; Rus, D.L. A Recipe for Soft Fluidic Elastomer Robots. Soft Robot. 2015, 2, 7–25. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rich, S.I.; Wood, R.J.; Majidi, C. Untethered soft robotics. Nat. Electron. 2018, 1, 102–112. [Google Scholar] [CrossRef]
- El-Atab, N.; Mishra, R.B.; Al-Modaf, F.; Joharji, L.; Alsharif, A.A.; Alamoudi, H.; Diaz, M.; Qaiser, N.; Hussain, M.M. Soft Actuators for Soft Robotic Applications: A Review. Adv. Intell. Syst. 2020, 2, 2000128. [Google Scholar] [CrossRef]
- Kim, S.; Laschi, C.; Trimmer, B. Soft robotics: A bioinspired evolution in robotics. Trends Biotechnol. 2013, 31, 287–294. [Google Scholar] [CrossRef] [PubMed]
- Huang, X.; Kumar, K.; Jawed, M.K.; Nasab, A.M.; Ye, Z.; Shan, W.; Majidi, C. Highly Dynamic Shape Memory Alloy Actuator for Fast Moving Soft Robots. Adv. Mater. Technol. 2019, 4, 1800540. [Google Scholar] [CrossRef]
- Wang, W.; Rodrigue, H.; Kim, H.-I.; Han, M.-W.; Ahn, S.-H. Soft composite hinge actuator and application to compliant robotic gripper. Compos. Part B Eng. 2016, 98, 397–405. [Google Scholar] [CrossRef]
- Olson, G.; Hatton, R.L.; Adams, J.A.; Mengüç, Y. An Euler–Bernoulli beam model for soft robot arms bent through self-stress and external loads. Int. J. Solids Struct. 2020, 207, 113–131. [Google Scholar] [CrossRef]
- Chi, Y.; Tang, Y.; Liu, H.; Yin, J. Leveraging Monostable and Bistable Pre-Curved Bilayer Actuators for High-Performance Multitask Soft Robots. Adv. Mater. Technol. 2020, 5, 2000370. [Google Scholar] [CrossRef]
- Reinhart, R.F.; Steil, J.J. Hybrid Mechanical and Data-driven Modeling Improves Inverse Kinematic Control of a Soft Robot. Procedia Technol. 2016, 26, 12–19. [Google Scholar] [CrossRef]
- Cianchetti, M.; Arienti, A.; Follador, M.; Mazzolai, B.; Dario, P.; Laschi, C. Design concept and validation of a robotic arm inspired by the octopus. Mater. Sci. Eng. C 2011, 31, 1230–1239. [Google Scholar] [CrossRef]
- Sun, W.; Li, B.; Zhang, F.; Fang, C.; Lu, Y.; Gao, X.; Cao, C.; Chen, G.; Zhang, C.; Wang, Z.L. TENG-Bot: Triboelectric nanogenerator powered soft robot made of uni-directional dielectric elastomer. Nano Energy 2021, 85, 106012. [Google Scholar] [CrossRef]
- Tang, X.; Li, K.; Liu, Y.; Zhou, D.; Zhao, J. A soft crawling robot driven by single twisted and coiled actuator. Sens. Actuators A Phys. 2019, 291, 80–86. [Google Scholar] [CrossRef]
- Zeng, H.; Wani, O.M.; Wasylczyk, P.; Priimagi, A. Light-Driven, Caterpillar-Inspired Miniature Inching Robot. Macromol. Rapid Commun. 2018, 39, 1700224. [Google Scholar] [CrossRef]
- Lee, K.-M.; Kim, Y.; Paik, J.K.; Shin, B. Clawed Miniature Inchworm Robot Driven by Electromagnetic Oscillatory Actuator. J. Bionic Eng. 2015, 12, 519–526. [Google Scholar] [CrossRef]
- Joyee, E.B.; Pan, Y. Additive manufacturing of multi-material soft robot for on-demand drug delivery applications. J. Manuf. Process. 2020, 56, 1178–1184. [Google Scholar] [CrossRef]
- Li, J.; Godaba, H.; Zhang, Z.; Foo, C.; Zhu, J. A soft active origami robot. Extreme Mech. Lett. 2018, 24, 30–37. [Google Scholar] [CrossRef]
- Onal, C.D.; Rus, D. Autonomous undulatory serpentine locomotion utilizing body dynamics of a fluidic soft robot. Bioinspir. Biomim. 2013, 8, 026003. [Google Scholar] [CrossRef]
- Mann, M.P.; Damti, L.; Tirosh, G.; Zarrouk, D. Minimally actuated serial robot. Robotica 2017, 36, 408–426. [Google Scholar] [CrossRef] [Green Version]
- Koh, J.-S.; Cho, K.-J. Omegabot: Biomimetic inchworm robot using SMA coil actuator and smart composite microstructures (SCM). In Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guilin, China, 19–23 December 2009; pp. 1154–1159. [Google Scholar] [CrossRef]
- Koh, J.-S.; Cho, K.-J. Omegabot: Crawling robot inspired by Ascotis Selenaria. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 109–114. [Google Scholar] [CrossRef]
- Horchler, A.D.; Kandhari, A.; Daltorio, K.A.; Moses, K.C.; Andersen, K.B.; Bunnelle, H.; Kershaw, J.; Tavel, W.H.; Bachmann, R.J.; Chiel, H.J.; et al. Worm-Like Robotic Locomotion with a Compliant Modular Mesh. In Biomimetic and Biohybrid Systems: 4th International Conference, Living Machines 2015, Barcelona, Spain, 28–31 July 2015; Lecture Notes in Computer Science; Wilson, S.P., Verschure, P.F.M.J., Mura, A., Prescott, T.J., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 26–37. [Google Scholar] [CrossRef]
- Jiang, F.; Zhang, Z.; Wang, X.; Cheng, G.; Zhang, Z.; Ding, J. Pneumatically Actuated Self-Healing Bionic Crawling Soft Robot. J. Intell. Robot. Syst. 2020, 100, 445–454. [Google Scholar] [CrossRef]
- Godaba, H.; Wang, Y.; Cao, J.; Zhu, J. Development of soft robots using dielectric elastomer actuators. In Electroactive Polymer Actuators and Devices; Bar-Cohen, Y., Vidal, F., Eds.; 97981T–97981T-9; SPIE: Bellingham, DC, USA, 2016. [Google Scholar] [CrossRef]
- Ren, Z.; Hu, W.; Dong, X.; Sitti, M. Multi-functional soft-bodied jellyfish-like swimming. Nat. Commun. 2019, 10, 2703. [Google Scholar] [CrossRef] [Green Version]
- Christianson, C.; Bayag, C.; Li, G.; Jadhav, S.; Giri, A.; Agba, C.; Li, T.; Tolley, M.T. Jellyfish-Inspired Soft Robot Driven by Fluid Electrode Dielectric Organic Robotic Actuators. Front. Robot. AI 2019, 6, 126. [Google Scholar] [CrossRef] [Green Version]
- Preechayasomboon, P.; Rombokas, E. Negshell casting: 3D-printed structured and sacrificial cores for soft robot fabrication. PLoS ONE 2020, 15, e0234354. [Google Scholar] [CrossRef]
- Alspach, A.; Kim, J.; Yamane, K. Design and fabrication of a soft robotic hand and arm system. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 369–375. [Google Scholar] [CrossRef]
- Ariyanto, M.; Setiawan, J.D.; Ismail, R.; Haryanto, I.; Febrina, T.; Saksono, D.R. Design and Characterization of Low-Cost Soft Pneumatic Bending Actuator for Hand Rehabilitation. In Proceedings of the 2018 5th International Conference on Information Technology, Computer, and Electrical Engineering (ICITACEE), Semarang, Indonesia, 27–28 September 2018; pp. 45–50. [Google Scholar] [CrossRef]
- Hong, T.H.; Park, S.-H.; Park, J.-H.; Paik, N.-J.; Park, Y.-L. Design of Pneumatic Origami Muscle Actuators (POMAs) for A Soft Robotic Hand Orthosis for Grasping Assistance. In Proceedings of the 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 15 May–15 July 2020; pp. 627–632. [Google Scholar] [CrossRef]
- Shahid, T.; Gouwanda, D.; Nurzaman, S.G.; Gopalai, A.A. Moving toward Soft Robotics: A Decade Review of the Design of Hand Exoskeletons. Biomimetics 2018, 3, 17. [Google Scholar] [CrossRef] [Green Version]
- Yap, H.K.; Lim, J.H.; Goh, J.C.H.; Yeow, C.-H. Design of a Soft Robotic Glove for Hand Rehabilitation of Stroke Patients With Clenched Fist Deformity Using Inflatable Plastic Actuators. J. Med. Devices 2016, 10, 044504. [Google Scholar] [CrossRef]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft Robotic Grippers. Adv. Mater. 2018, 30, e1707035. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cappello, L.; Meyer, J.T.; Galloway, K.C.; Peisner, J.D.; Granberry, R.; Wagner, D.A.; Engelhardt, S.; Paganoni, S.; Walsh, C.J. Assisting hand function after spinal cord injury with a fabric-based soft robotic glove. J. Neuroeng. Rehabil. 2018, 15, 59. [Google Scholar] [CrossRef] [PubMed]
- Lambrecht, B.; Horchler, A.; Quinn, R. A Small, Insect-Inspired Robot that Runs and Jumps. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 1240–1245. [Google Scholar] [CrossRef]
- Tolley, M.T.; Shepherd, R.F.; Mosadegh, B.; Galloway, K.C.; Wehner, M.; Karpelson, M.; Wood, R.J.; Whitesides, G.M.; Garriga-Casanovas, A.; Collison, I.; et al. A Resilient, Untethered Soft Robot. Soft Robot. 2014, 1, 213–223. [Google Scholar] [CrossRef] [Green Version]
- Lu, H.; Zhang, M.; Yang, Y.; Huang, Q.; Fukuda, T.; Wang, Z.; Shen, Y. A bioinspired multilegged soft millirobot that functions in both dry and wet conditions. Nat. Commun. 2018, 9, 3944. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Meng, L.; Kang, R.; Gan, D.; Chen, G.; Chen, L.; Branson, D.T.; Dai, J.S. A Mechanically Intelligent Crawling Robot Driven by Shape Memory Alloy and Compliant Bistable Mechanism. J. Mech. Robot. 2020, 12, 061005. [Google Scholar] [CrossRef]
- Qi, Q.; Teng, Y.; Li, X. Design and characteristic study of a pneumatically actuated earthworm-like soft robot. In Proceedings of the 2015 International Conference on Fluid Power and Mechatron. (FPM), Harbin, China, 5–7 August 2015; pp. 435–439. [Google Scholar] [CrossRef]
- Hu, W.; Lum, G.Z.; Mastrangeli, M.; Sitti, M. Small-scale soft-bodied robot with multimodal locomotion. Nature 2018, 554, 81–85. [Google Scholar] [CrossRef] [PubMed]
- Song, C.-W.; Lee, D.-J.; Lee, S.-Y. Bioinspired segment robot with earthworm-like plane locomotion. J. Bionic Eng. 2016, 13, 292–302. [Google Scholar] [CrossRef]
- Jung, G.-P.; Casarez, C.S.; Jung, S.-P.; Fearing, R.S.; Cho, K.-J. An integrated jumping-crawling robot using height-adjustable jumping module. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 4680–4685. [Google Scholar] [CrossRef]
- Tolley, M.T.; Shepherd, R.F.; Karpelson, M.; Bartlett, N.W.; Galloway, K.C.; Wehner, M.; Nunes, R.; Whitesides, G.M.; Wood, R.J. An untethered jumping soft robot. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 561–566. [Google Scholar] [CrossRef]
- Mansour, N.A.; Jang, T.; Baek, H.; Shin, B.; Ryu, B.; Kim, Y. Compliant closed-chain rolling robot using modular unidirectional SMA actuators. Sens. Actuators A Phys. 2020, 310, 112024. [Google Scholar] [CrossRef]
- Kim, K.; Agogino, A.K.; Agogino, A.M.; Feng, R.; Zhang, Y.; Liu, J.; Zhang, Y.; Li, J.; Baoyin, H.; Shah, D.S.; et al. Rolling Locomotion of Cable-Driven Soft Spherical Tensegrity Robots. Soft Robot. 2020, 7, 346–361. [Google Scholar] [CrossRef] [PubMed]
- Zhou, J.; Li, X.; Xu, J.; Tian, Y.; Zhao, H.; Liu, X.-J. A Soft Crawling Robot Inspired by Inchworms. In Proceedings of the 2019 IEEE 9th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Suzhou, China, 29 July–2 August 2019; pp. 209–214. [Google Scholar] [CrossRef]
- Du, Y.; Xu, M.; Dong, E.; Zhang, S.; Yang, J. A novel soft robot with three locomotion modes. In Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics, Karon Beach, Thailand, 7–11 December 2011; pp. 98–103. [Google Scholar] [CrossRef]
- Chen, S.; Cao, Y.; Sarparast, M.; Yuan, H.; Dong, L.; Tan, X.; Cao, C. Soft Crawling Robots: Design, Actuation, and Locomotion. Adv. Mater. Technol. 2020, 5, 1900837. [Google Scholar] [CrossRef]
- Farber, E.; Zhu, J.-N.; Popovich, A.; Popovich, V. A review of NiTi shape memory alloy as a smart material produced by additive manufacturing. Mater. Today Proc. 2020, 30, 761–767. [Google Scholar] [CrossRef]
- Gupta, U.; Qin, L.; Wang, Y.; Godaba, H.; Zhu, J. Soft robots based on dielectric elastomer actuators: A review. Smart Mater. Struct. 2019, 28, 103002. [Google Scholar] [CrossRef]
- Polygerinos, P.; Correll, N.; Morin, S.A.; Mosadegh, B.; Onal, C.D.; Petersen, K.; Cianchetti, M.; Tolley, M.T.; Shepherd, R.F. Soft Robotics: Review of Fluid-Driven Intrinsically Soft Devices; Manufacturing, Sensing, Control, and Applications in Human-Robot Interaction: Review of Fluid-Driven Intrinsically Soft Robots. Adv. Eng. Mater. 2017, 19, 1700016. [Google Scholar] [CrossRef]
- Ebrahimi, N.; Bi, C.; Cappelleri, D.J.; Ciuti, G.; Conn, A.T.; Faivre, D.; Habibi, N.; Hošovský, A.; Iacovacci, V.; Khalil, I.S.M.; et al. Magnetic Actuation Methods in Bio/Soft Robotics. Adv. Funct. Mater. 2020, 31, 2005137. [Google Scholar] [CrossRef]
- Lee, C.; Kim, M.; Kim, Y.J.; Hong, N.; Ryu, S.; Kim, H.J.; Kim, S. Soft robot review. Int. J. Control. Autom. Syst. 2017, 15, 3–15. [Google Scholar] [CrossRef]
- Ahn, C.; Liang, X.; Cai, S. Bioinspired Design of Light-Powered Crawling, Squeezing, and Jumping Untethered Soft Robot. Adv. Mater. Technol. 2019, 4, 1900185. [Google Scholar] [CrossRef]
- Wang, R.; Han, L.; Wu, C.; Dong, Y.; Zhao, X. Localizable, Identifiable, and Perceptive Untethered Light-Driven Soft Crawling Robot. ACS Appl. Mater. Interfaces 2022, 14, 6138–6147. [Google Scholar] [CrossRef] [PubMed]
- Ilievski, F.; Mazzeo, A.D.; Shepherd, R.F.; Chen, X.; Whitesides, G.M. Soft Robotics for Chemists. Angew. Chem. Int. Ed. 2011, 50, 1890–1895. [Google Scholar] [CrossRef] [PubMed]
- Suhail, R.; Amato, G.; McCrum, D. Heat-activated prestressing of NiTiNb shape memory alloy wires. Eng. Struct. 2020, 206, 110128. [Google Scholar] [CrossRef]
- Kök, M.; Al-Jaf, A.O.A.; Çirak, Z.D.; Qader, I.N.; Özen, E. Effects of heat treatment temperatures on phase transformation, thermodynamical parameters, crystal microstructure, and electrical resistivity of NiTiV shape memory alloy. J. Therm. Anal. Calorim. 2019, 139, 3405–3413. [Google Scholar] [CrossRef]
- Cisse, C.; Zaki, W.; Ben Zineb, T. A review of constitutive models and modeling techniques for shape memory alloys. Int. J. Plast. 2016, 76, 244–284. [Google Scholar] [CrossRef]
- Kumari, S.; Dinbandhu; Abhishek, K. Study of machinability aspects of shape memory alloys: A critical review. Mater. Today Proc. 2021, 44, 1336–1343. [Google Scholar] [CrossRef]
- Mohd-Jani, J.; Leary, M.; Subic, A.; Gibson, M.A. A review of shape memory alloy research, applications and opportunities. Mater. Des. 2014, 56, 1078–1113. [Google Scholar] [CrossRef]
- Huang, X.; Ford, M.; Patterson, Z.J.; Zarepoor, M.; Pan, C.; Majidi, C. Shape memory materials for electrically-powered soft machines. J. Mater. Chem. B 2020, 8, 4539–4551. [Google Scholar] [CrossRef]
- Karami, M.; Chen, X. Nanomechanics of shape memory alloys. Mater. Today Adv. 2021, 10, 100141. [Google Scholar] [CrossRef]
- Wilkes, K.E.; Liaw, P.K. The fatigue behavior of shape-memory alloys. JOM 2000, 52, 45–51. [Google Scholar] [CrossRef]
- Huang, W. On the selection of shape memory alloys for actuators. Mater. Des. 2002, 23, 11–19. [Google Scholar] [CrossRef]
- Malik, V.; Srivastava, S.; Gupta, S.; Sharma, V.; Vishnoi, M.; Mamatha, T. A novel review on shape memory alloy and their applications in extraterrestrial roving missions. Mater. Today Proc. 2020, 44, 4961–4965. [Google Scholar] [CrossRef]
- Clithy, E. Application of Shape Memory Alloy. Sci. Insights 2020, 33, 167–174. [Google Scholar] [CrossRef]
- Kim, B.; Lee, M.G.; Lee, Y.P.; Kim, Y.; Lee, G. An earthworm-like micro robot using shape memory alloy actuator. Sens. Actuators A Phys. 2006, 125, 429–437. [Google Scholar] [CrossRef]
- Yuk, H.; Kim, D.; Lee, H.; Jo, S.; Shin, J.H. Shape memory alloy-based small crawling robots inspired by C. elegans. Bioinspir. Biomim. 2011, 6, 046002. [Google Scholar] [CrossRef] [PubMed]
- Pan, J.; Shi, Z.; Wang, T. Variable-model SMA-driven spherical robot. Sci. China Technol. Sci. 2019, 62, 1401–1411. [Google Scholar] [CrossRef]
- Kim, M.-S.; Chu, W.-S.; Lee, J.-H.; Kim, Y.-M.; Ahn, S.-H. Manufacturing of inchworm robot using shape memory alloy (SMA) embedded composite structure. Int. J. Precis. Eng. Manuf. 2011, 12, 565–568. [Google Scholar] [CrossRef]
- Wang, W.; Lee, J.-Y.; Rodrigue, H.; Song, S.-H.; Chu, W.-S.; Ahn, S.-H. Locomotion of inchworm-inspired robot made of smart soft composite (SSC). Bioinspir. Biomim. 2014, 9, 046006. [Google Scholar] [CrossRef]
- Lin, H.-T.; Leisk, G.G.; Trimmer, B. GoQBot: A caterpillar-inspired soft-bodied rolling robot. Bioinspir. Biomim. 2011, 6, 026007. [Google Scholar] [CrossRef]
- She, Y.; Li, C.; Cleary, J.; Su, H.-J. Design and Fabrication of a Soft Robotic Hand With Embedded Actuators and Sensors. J. Mech. Robot. 2015, 7, 021007. [Google Scholar] [CrossRef]
- Umedachi, T.; Vikas, V.; Trimmer, B.A. Highly deformable 3-D printed soft robot generating inching and crawling locomotions with variable friction legs. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 4590–4595. [Google Scholar] [CrossRef]
- Villanueva, A.; Smith, C.; Priya, S. A biomimetic robotic jellyfish (Robojelly) actuated by shape memory alloy composite actuators. Bioinspir. Biomim. 2011, 6, 036004. [Google Scholar] [CrossRef]
- Yang, X.; Chang, L.; Pérez-Arancibia, N.O. An 88-milligram insect-scale autonomous crawling robot driven by a catalytic artificial muscle. Sci. Robot. 2020, 5, eaba0015. [Google Scholar] [CrossRef]
- Rao, A.; Srinivasa, A.R. Experiments on functional fatigue of thermally activated shape memory alloy springs and correlations with driving force intensity. In Proceedings of the Behavior and Mechanics of Multifunctional Materials and Composites 2013, San Diego, CA, USA, 10–14 March 2013; Volume 8689, pp. 198–206. [Google Scholar] [CrossRef]
- Jugo, J.; Feuchtwanger, J.; Corres, J. Numerical optimization based control design for a ferromagnetic shape memory alloy actuator. Sens. Actuators A Phys. 2021, 331, 112835. [Google Scholar] [CrossRef]
- Ranzani, T.; Russo, S.; Bartlett, N.W.; Wehner, M.; Wood, R.J. Increasing the Dimensionality of Soft Microstructures through Injection-Induced Self-Folding. Adv. Mater. 2018, 30, e1802739. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Belforte, G.; Eula, G.; Ivanov, A.; Sirolli, S. Soft Pneumatic Actuators for Rehabilitation. Actuators 2014, 3, 84–106. [Google Scholar] [CrossRef] [Green Version]
- Xu, Q.; Liu, J. Effective enhanced model for a large deformable soft pneumatic actuator. Acta Mech. Sin. 2020, 36, 245–255. [Google Scholar] [CrossRef]
- Breitman, P.; Matia, Y.; Gat, A.D. Fluid Mechanics of Pneumatic Soft Robots. Soft Robot. 2021, 8, 519–530. [Google Scholar] [CrossRef]
- Ge, J.Z.; Calderon, A.A.; Perez-Arancibia, N.O. An earthworm-inspired soft crawling robot controlled by friction. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 5–8 December 2017; pp. 834–841. [Google Scholar] [CrossRef] [Green Version]
- Jinqiang, N.; Chaoyang, T.; Yuxiang, L. Inchworm Inspired Pneumatic Soft Robot Based on Friction Hysteresis. J. Robot. Autom. 2017, 1, 54–63. [Google Scholar] [CrossRef]
- Terryn, S.; Brancart, J.; Lefeber, D.; Van Assche, G.; Vanderborght, B. Self-healing soft pneumatic robots. Sci. Robot. 2017, 2, eaan4268. [Google Scholar] [CrossRef]
- Verma, M.S.; Ainla, A.; Yang, D.; Harburg, D.; Whitesides, G.M.; Ohta, P.; Valle, L.; King, J.; Low, K.; Yi, J.; et al. A Soft Tube-Climbing Robot. Soft Robot. 2018, 5, 133–137. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, X.; Wang, S.; Meng, D.; Liang, B. Design and Modeling of a Parallel-Pipe-Crawling Pneumatic Soft Robot. IEEE Access 2019, 7, 134301–134317. [Google Scholar] [CrossRef]
- Hawkes, E.W.; Blumenschein, L.H.; Greer, J.D.; Okamura, A.M. A soft robot that navigates its environment through growth. Sci. Robot. 2017, 2, eaan3028. [Google Scholar] [CrossRef]
- Nakajima, T.; Yamaguchi, T.; Wakabayashi, S.; Arie, T.; Akita, S.; Takei, K. Transformable Pneumatic Balloon-Type Soft Robot Using Attachable Shells. Adv. Mater. Technol. 2020, 5, 2000201. [Google Scholar] [CrossRef]
- Yu, M.; Yang, W.; Yu, Y.; Cheng, X.; Jiao, Z. A Crawling Soft Robot Driven by Pneumatic Foldable Actuators Based on Miura-Ori. Actuators 2020, 9, 26. [Google Scholar] [CrossRef] [Green Version]
- Ueno, S.; Takemura, K.; Yokota, S.; Edamura, K. Micro inchworm robot using electro-conjugate fluid. Sens. Actuators A Phys. 2014, 216, 36–42. [Google Scholar] [CrossRef]
- Lu, S.; Chen, D.; Hao, R.; Luo, S.; Wang, M. Design, fabrication and characterization of soft sensors through EGaIn for soft pneumatic actuators. Measurement 2020, 164, 107996. [Google Scholar] [CrossRef]
- Godaba, H.; Li, J.; Wang, Y.; Zhu, J. A Soft Jellyfish Robot Driven by a Dielectric Elastomer Actuator. IEEE Robot. Autom. Lett. 2016, 1, 624–631. [Google Scholar] [CrossRef]
- Deimel, R.; Brock, O. A novel type of compliant and underactuated robotic hand for dexterous grasping. Int. J. Robot. Res. 2016, 35, 161–185. [Google Scholar] [CrossRef] [Green Version]
- Xie, M.; Zhu, M.; Yang, Z.; Okada, S.; Kawamura, S. Flexible self-powered multifunctional sensor for stiffness-tunable soft robotic gripper by multimaterial 3D printing. Nano Energy 2020, 79, 105438. [Google Scholar] [CrossRef]
- Jin, G.; Sun, Y.; Geng, J.; Yuan, X.; Chen, T.; Liu, H.; Wang, F.; Sun, L. Bioinspired soft caterpillar robot with ultra-stretchable bionic sensors based on functional liquid metal. Nano Energy 2021, 84, 105896. [Google Scholar] [CrossRef]
- Chen, G.; Yang, X.; Zhang, X.; Hu, H. Water hydraulic soft actuators for underwater autonomous robotic systems. Appl. Ocean Res. 2021, 109, 102551. [Google Scholar] [CrossRef]
- Duduta, M.; Hajiesmaili, E.; Zhao, H.; Wood, R.J.; Clarke, D.R. Realizing the potential of dielectric elastomer artificial muscles. Proc. Natl. Acad. Sci. USA 2019, 116, 2476–2481. [Google Scholar] [CrossRef] [Green Version]
- Kumar, R.; Senthamaraikannan, P.; Saravanakumar, S.; Khan, A.; Ganesh, K.; Ananth, S.V. Electroactive polymer composites and applications. In Polymer Nanocomposite-Based Smart Materials; Elsevier: Amsterdam, The Netherlands, 2020; pp. 149–156. [Google Scholar] [CrossRef]
- Cheng, Z.; Zhang, Q. Field-Activated Electroactive Polymers. MRS Bull. 2008, 33, 183–187. [Google Scholar] [CrossRef]
- Chang, L.; Liu, Y.; Yang, Q.; Yu, L.; Liu, J.; Zhu, Z.; Lu, P.; Wu, Y.; Hu, Y. Ionic Electroactive Polymers Used in Bionic Robots: A Review. J. Bionic Eng. 2018, 15, 765–782. [Google Scholar] [CrossRef]
- O’halloran, A.; O’malley, F.; McHugh, P. A review on dielectric elastomer actuators, technology, applications, and challenges. J. Appl. Phys. 2008, 104, 071101. [Google Scholar] [CrossRef]
- Brochu, P.; Pei, Q. Dielectric Elastomers for Actuators and Artificial Muscles. In Electroactivity in Polymeric Materials; Springer: Boston, MA, USA, 2012; pp. 1–56. [Google Scholar]
- Anderson, I.A.; Gisby, T.A.; McKay, T.G.; O’brien, B.M.; Calius, E.P. Multi-functional dielectric elastomer artificial muscles for soft and smart machines. J. Appl. Phys. 2012, 112, 041101. [Google Scholar] [CrossRef]
- Rosset, S.; Shea, H.R. Flexible and stretchable electrodes for dielectric elastomer actuators. Appl. Phys. A 2013, 110, 281–307. [Google Scholar] [CrossRef] [Green Version]
- Brochu, P.; Pei, Q. Advances in Dielectric Elastomers for Actuators and Artificial Muscles. Macromol. Rapid Commun. 2010, 31, 10–36. [Google Scholar] [CrossRef]
- Gu, G.-Y.; Zhu, J.; Zhu, L.-M.; Zhu, X. A survey on dielectric elastomer actuators for soft robots. Bioinspir. Biomim. 2017, 12, 011003. [Google Scholar] [CrossRef]
- Wang, N.; Cui, C.; Guo, H.; Chen, B.; Zhang, X. Advances in dielectric elastomer actuation technology. Sci. China Technol. Sci. 2018, 61, 1512–1527. [Google Scholar] [CrossRef]
- Chortos, A.; Hajiesmaili, E.; Morales, J.; Clarke, D.R.; Lewis, J.A. 3D Printing of Interdigitated Dielectric Elastomer Actuators. Adv. Funct. Mater. 2020, 30, 1907375. [Google Scholar] [CrossRef]
- Gu, G.; Zou, J.; Zhao, R.; Zhao, X.; Zhu, X. Soft wall-climbing robots. Sci. Robot. 2018, 3, eaat2874. [Google Scholar] [CrossRef] [PubMed]
- Shintake, J.; Shea, H.; Floreano, D. Biomimetic underwater robots based on dielectric elastomer actuators. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 4957–4962. [Google Scholar] [CrossRef] [Green Version]
- Christianson, C.; Goldberg, N.N.; Deheyn, D.D.; Cai, S.; Tolley, M.T. Translucent soft robots driven by frameless fluid electrode dielectric elastomer actuators. Sci. Robot. 2018, 3, eaat1893. [Google Scholar] [CrossRef]
- Jung, K.; Koo, J.C.; Nam, J.-D.; Lee, Y.K.; Choi, H.R. Artificial annelid robot driven by soft actuators. Biomimetics 2007, 2, S42. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nguyen, C.T.; Phung, H.; Nguyen, T.D.; Lee, C.; Kim, U.; Lee, D.; Moon, H.; Koo, J.; Nam, J.-D.; Choi, H.R. A small biomimetic quadruped robot driven by multistacked dielectric elastomer actuators. Smart Mater. Struct. 2014, 23, 065005. [Google Scholar] [CrossRef]
- Xu, L.; Chen, H.-Q.; Zou, J.; Dong, W.-T.; Gu, G.-Y.; Zhu, L.-M.; Zhu, X.-Y. Bio-inspired annelid robot: A dielectric elastomer actuated soft robot. Bioinspir. Biomim. 2017, 12, 025003. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, W.-B.; Zhang, W.-M.; Zou, H.-X.; Peng, Z.-K.; Meng, G. A Fast Rolling Soft Robot Driven by Dielectric Elastomer. IEEE/ASME Trans. Mechatron. 2018, 23, 1630–1640. [Google Scholar] [CrossRef]
- Henke, E.-F.M.; Schlatter, S.; Anderson, I.A.; Nasab, A.M.; Sabzehzar, A.; Tatari, M.; Majidi, C.; Shan, W.; Ainla, A.; Verma, M.S.; et al. Soft Dielectric Elastomer Oscillators Driving Bioinspired Robots. Soft Robot. 2017, 4, 353–366. [Google Scholar] [CrossRef] [Green Version]
- da Cunha, M.P.; Debije, M.G.; Schenning, A.P.H.J. Bioinspired light-driven soft robots based on liquid crystal polymers. Chem. Soc. Rev. 2020, 49, 6568–6578. [Google Scholar] [CrossRef]
- Ohm, C.; Brehmer, M.; Zentel, R. Liquid Crystalline Elastomers as Actuators and Sensors. Adv. Mater. 2010, 22, 3366–3387. [Google Scholar] [CrossRef]
- Cui, Y.; Yin, Y.; Wang, C.; Sim, K.; Li, Y.; Yu, C.; Song, J. Transient thermo-mechanical analysis for bimorph soft robot based on thermally responsive liquid crystal elastomers. Appl. Math. Mech. 2019, 40, 943–952. [Google Scholar] [CrossRef]
- Rogóż, M.; Dradrach, K.; Xuan, C.; Wasylczyk, P. A Millimeter-Scale Snail Robot Based on a Light-Powered Liquid Crystal Elastomer Continuous Actuator. Macromol. Rapid Commun. 2019, 40, 1900279. [Google Scholar] [CrossRef] [PubMed]
- Rogóż, M.; Zeng, H.; Xuan, C.; Wiersma, D.S.; Wasylczyk, P. Light-Driven Soft Robot Mimics Caterpillar Locomotion in Natural Scale. Adv. Opt. Mater. 2016, 4, 1689–1694. [Google Scholar] [CrossRef]
- da Cunha, M.P.; Ambergen, S.; Debije, M.G.; Homburg, E.F.G.A.; Toonder, J.M.J.D.; Schenning, A.P.H.J. A Soft Transporter Robot Fueled by Light. Adv. Sci. 2020, 7, 1902842. [Google Scholar] [CrossRef] [Green Version]
- Wei, W.; Zhang, Z.; Wei, J.; Li, X.; Guo, J. Phototriggered Selective Actuation and Self-Oscillating in Dual-Phase Liquid Crystal Photonic Actuators. Adv. Opt. Mater. 2018, 6, 1800131. [Google Scholar] [CrossRef]
- Bhandari, B.; Lee, G.-Y.; Ahn, S.-H. A review on IPMC material as actuators and sensors: Fabrications, characteristics and applications. Int. J. Precis. Eng. Manuf. 2012, 13, 141–163. [Google Scholar] [CrossRef]
- Haq, M.U.; Gang, Z. Ionic polymer–metal composite applications. Emerg. Mater. Res. 2016, 5, 153–164. [Google Scholar] [CrossRef] [Green Version]
- Jo, C.; Pugal, D.; Oh, I.-K.; Kim, K.J.; Asaka, K. Recent advances in ionic polymer–metal composite actuators and their modeling and applications. Prog. Polym. Sci. 2013, 38, 1037–1066. [Google Scholar] [CrossRef]
- Carrico, J.D.; Kim, K.J.; Leang, K.K. 3D-printed ionic polymer-metal composite soft crawling robot. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 4313–4320. [Google Scholar] [CrossRef]
- Guo, S.; Ge, Y.; Li, L.; Liu, S. Underwater Swimming Micro Robot Using IPMC Actuator. In Proceedings of the 2006 International Conference on Mechatron. and Automation, Luoyang, China, 25–28 June 2006; pp. 249–254. [Google Scholar] [CrossRef]
- Yeom, S.-W.; Oh, I.-K. A biomimetic jellyfish robot based on ionic polymer metal composite actuators. Smart Mater. Struct. 2009, 18, 085002. [Google Scholar] [CrossRef]
- Li, H.; Fan, M.; Yue, Y.; Hu, G.; He, Q.; Yu, M. Motion Control of Capsule-like Underwater Robot Utilizing the Swing Properties of Ionic Polymer Metal Composite Actuators. J. Bionic Eng. 2020, 17, 281–289. [Google Scholar] [CrossRef]
- Naga, N.; Ishida, T.; Hayakawa, T. Synthesis of Joint-Linker Type Ionic Gels Containing Imidazole Units in the Network. ECS Trans. 2018, 88, 107–118. [Google Scholar] [CrossRef]
- Fukagawa, M.; Koshiba, Y.; Fukushima, T.; Morimoto, M.; Ishida, K. Anomalous piezoelectric properties of poly(vinylidene fluoride–trifluoroethylene)/ionic liquid gels. Jpn. J. Appl. Phys. 2018, 57, 04FL06. [Google Scholar] [CrossRef] [Green Version]
- Hara, Y.; Yoshida, K.; Khosla, A.; Kawakami, M.; Hosoda, K.; Furukawa, H. Very Wide Sensing Range and Hysteresis Behaviors of Tactile Sensor Developed by Embedding Soft Ionic Gels in Soft Silicone Elastomers. ECS J. Solid State Sci. Technol. 2020, 9, 061024. [Google Scholar] [CrossRef]
- Unver, O.; Sitti, M. Tankbot: A Palm-size, Tank-like Climbing Robot using Soft Elastomer Adhesive Treads. Int. J. Robot. Res. 2010, 29, 1761–1777. [Google Scholar] [CrossRef]
- Sun, J.; Tighe, B.; Liu, Y.; Zhao, J. Twisted-and-Coiled Actuators with Free Strokes Enable Soft Robots with Programmable Motions. Soft Robot. 2021, 8, 213–225. [Google Scholar] [CrossRef]
- Onal, C.D.; Chen, X.; Whitesides, G.M.; Rus, D. Soft Mobile Robots with On-Board Chemical Pressure Generation. In Robotics Research; Springer Tracts in Advanced Robotics; Springer International Publishing: Cham, Switzerland, 2016; pp. 525–540. [Google Scholar] [CrossRef]
- Lam, T.L.; Xu, Y. A flexible tree climbing robot: Treebot—Design and implementation. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 5849–5854. [Google Scholar] [CrossRef]
- Calisti, M.; Giorelli, M.; Laschi, C. A Locomotion Strategy for an Octopus-Bioinspired Robot. In Biomimetic and Biohybrid Systems: First International Conference, Living Machines 2012, Barcelona, Spain, 9–12 July 2012. Proceedings; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2012; Volume 7375, pp. 337–338. [Google Scholar] [CrossRef]
- Moreira, F.; Abundis, A.; Aguirre, M.; Castillo, J.; Bhounsule, P.A. An Inchworm-inspired Robot Based on Modular Body, Electronics and Passive Friction Pads Performing the Two-anchor Crawl Gait. J. Bionic Eng. 2018, 15, 820–826. [Google Scholar] [CrossRef]
- Chen, R.; Liu, R.; Chen, J.; Zhang, J. A gecko inspired wall-climbing robot based on electrostatic adhesion mechanism. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12–14 December 2013; pp. 396–401. [Google Scholar] [CrossRef]
- Sun, Y.; Liu, Y.; Pancheri, F.; Lueth, T.C. LARG: A Lightweight Robotic Gripper With 3-D Topology Optimized Adaptive Fingers. IEEE/ASME Trans. Mechatron. 2022, 27, 2026–2034. [Google Scholar] [CrossRef]
- Liu, C.-H.; Chung, F.-M.; Chen, Y.; Chiu, C.-H.; Chen, T.-L. Optimal Design of a Motor-Driven Three-Finger Soft Robotic Gripper. IEEE/ASME Trans. Mechatron. 2020, 25, 1830–1840. [Google Scholar] [CrossRef]
- Sayed, M.E.; Roberts, J.O.; McKenzie, R.M.; Aracri, S.; Buchoux, A.; Stokes, A.A. Limpet II: A Modular, Untethered Soft Robot. Soft Robot. 2021, 8, 319–339. [Google Scholar] [CrossRef]
- Niu, H.; Feng, R.; Xie, Y.; Jiang, B.; Sheng, Y.; Yu, Y.; Baoyin, H.; Zeng, X. MagWorm: A Biomimetic Magnet Embedded Worm-Like Soft Robot. Soft Robot. 2021, 8, 507–518. [Google Scholar] [CrossRef]
- Wang, C.; Sim, K.; Chen, J.; Kim, H.; Rao, Z.; Li, Y.; Chen, W.; Song, J.; Verduzco, R.; Yu, C. Soft Ultrathin Electronics Innervated Adaptive Fully Soft Robots. Adv. Mater. 2018, 30, e1706695. [Google Scholar] [CrossRef] [Green Version]
- Lu, X.; Zhang, H.; Fei, G.; Yu, B.; Tong, X.; Xia, H.; Zhao, Y. Liquid-Crystalline Dynamic Networks Doped with Gold Nanorods Showing Enhanced Photocontrol of Actuation. Adv. Mater. 2018, 30, e1706597. [Google Scholar] [CrossRef] [PubMed]
- Shahsavan, H.; Aghakhani, A.; Zeng, H.; Guo, Y.; Davidson, Z.S.; Priimagi, A.; Sitti, M. Bioinspired underwater locomotion of light-driven liquid crystal gels. Proc. Natl. Acad. Sci. USA 2020, 117, 5125–5133. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, Y.; Yu, Q.; Su, C.; Jiang, J.; Chen, N.; Shao, H. Light-Responsive Soft Actuators: Mechanism, Materials, Fabrication, and Applications. Actuators 2021, 10, 298. [Google Scholar] [CrossRef]
- Huang, F.; Weng, M.; Feng, Z.; Li, X.; Zhang, W.; Chen, L. Transparent photoactuators based on localized-surface-plasmon-resonant semiconductor nanocrystals: A platform for camouflage soft robots. Nanoscale 2020, 12, 11878–11886. [Google Scholar] [CrossRef]
- Wang, X.; Chan, K.H.; Cheng, Y.; Ding, T.; Li, T.; Achavananthadith, S.; Ahmet, S.; Ho, J.S.; Ho, G.W. Somatosensory, Light-Driven, Thin-Film Robots Capable of Integrated Perception and Motility. Adv. Mater. 2020, 32, e2000351. [Google Scholar] [CrossRef] [PubMed]
- Nemitz, M.P.; Mihaylov, P.; Barraclough, T.W.; Ross, D.; Stokes, A.A.; Kandhari, A.; Wang, Y.; Chiel, H.J.; Quinn, R.D.; Daltorio, K.A.; et al. Using Voice Coils to Actuate Modular Soft Robots: Wormbot, an Example. Soft Robot. 2016, 3, 198–204. [Google Scholar] [CrossRef]
- Bartlett, N.W.; Tolley, M.T.; Overvelde, J.T.B.; Weaver, J.C.; Mosadegh, B.; Bertoldi, K.; Whitesides, G.M.; Wood, R.J. A 3D-printed, functionally graded soft robot powered by combustion. Science 2015, 349, 161–165. [Google Scholar] [CrossRef] [Green Version]
- Shepherd, R.F.; Stokes, A.A.; Freake, J.; Barber, J.; Snyder, P.W.; Mazzeo, A.D.; Cademartiri, L.; Morin, S.A.; Whitesides, G.M. Using Explosions to Power a Soft Robot. Angew. Chem. Int. Ed. 2013, 52, 2892–2896. [Google Scholar] [CrossRef]
- Wehner, M.; Truby, R.L.; Fitzgerald, D.J.; Mosadegh, B.; Whitesides, G.M.; Lewis, J.A.; Wood, R.J. An integrated design and fabrication strategy for entirely soft, autonomous robots. Nature 2016, 536, 451–455. [Google Scholar] [CrossRef] [Green Version]
- Shian, S.; Bertoldi, K.; Clarke, D.R. Use of aligned fibers to enhance the performance of dielectric elastomer inchworm robots. In Electroactive Polymer Actuators and Devices 2015; Bar-Cohen, Y., Ed.; SPIE: Bellingham, DC, USA, 2015; Volume 9430, pp. 417–425. [Google Scholar] [CrossRef]
- Sheng, X.; Xu, H.; Zhang, N.; Ding, N.; Zhu, X.; Gu, G. Multi-material 3D printing of caterpillar-inspired soft crawling robots with the pneumatically bellow-type body and anisotropic friction feet. Sens. Actuators A Phys. 2020, 316, 112398. [Google Scholar] [CrossRef]
- Calisti, M.; Giorelli, M.; Levy, G.; Mazzolai, B.; Hochner, B.; Laschi, C.; Dario, P. An octopus-bioinspired solution to movement and manipulation for soft robots. Bioinspir. Biomim. 2011, 6, 036002. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, Y.; Parada, G.A.; Liu, S.; Zhao, X. Ferromagnetic soft continuum robots. Sci. Robot. 2019, 4, eaax7329. [Google Scholar] [CrossRef] [PubMed]
- Sun, Y.; Lim, C.M.; Tan, H.H.; Ren, H. Soft oral interventional rehabilitation robot based on low-profile soft pneumatic actuator. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 2907–2912. [Google Scholar] [CrossRef]
- Park, Y.-L.; Chen, B.-R.; Pérez-Arancibia, N.O.; Young, D.; Stirling, L.; Wood, R.J.; Goldfield, E.C.; Nagpal, R. Design and control of a bio-inspired soft wearable robotic device for ankle–foot rehabilitation. Bioinspir. Biomim. 2014, 9, 016007. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shi, Z.; Pan, J.; Tian, J.; Huang, H.; Jiang, Y.; Zeng, S. An Inchworm-inspired Crawling Robot. J. Bionic Eng. 2019, 16, 582–592. [Google Scholar] [CrossRef]
- Tanaka, H.; Chen, T.-Y.; Hosoda, K. Dynamic Turning of a Soft Quadruped Robot by Changing Phase Difference. Front. Robot. AI 2021, 8, 629523. [Google Scholar] [CrossRef]
- Salem, M.E.M.; Wang, Q.; Wen, R.; Xiang, M. Design and Characterization of Soft Pneumatic Actuator for Universal Robot Gripper. In Proceedings of the 2018 International Conference on Control and Robots (ICCR), Hong Kong, China, 15–17 September 2018; pp. 6–10. [Google Scholar] [CrossRef]
- Zhang, C.; Zhu, P.; Lin, Y.; Tang, W.; Jiao, Z.; Yang, H.; Zou, J. Fluid-driven artificial muscles: Bio-design, manufacturing, sensing, control, and applications. Bio-Design Manuf. 2021, 4, 123–145. [Google Scholar] [CrossRef]
- Ji, Q.; Fu, S.; Tan, K.; Muralidharan, S.T.; Lagrelius, K.; Danelia, D.; Andrikopoulos, G.; Wang, X.V.; Wang, L.; Feng, L. Synthesizing the optimal gait of a quadruped robot with soft actuators using deep reinforcement learning. Robot. Comput. Manuf. 2022, 78, 102382. [Google Scholar] [CrossRef]
- Petković, D.; Danesh, A.S.; Dadkhah, M.; Misaghian, N.; Shamshirband, S.; Zalnezhad, E.; Pavlović, N.D. Adaptive control algorithm of flexible robotic gripper by extreme learning machine. Robot. Comput. Manuf. 2016, 37, 170–178. [Google Scholar] [CrossRef]
- Greer, J.D.; Blumenschein, L.H.; Alterovitz, R.; Hawkes, E.W.; Okamura, A.M. Robust navigation of a soft growing robot by exploiting contact with the environment. Int. J. Robot. Res. 2020, 39, 1724–1738. [Google Scholar] [CrossRef] [Green Version]
- Man, K.; Damasio, A. Homeostasis and soft robotics in the design of feeling machines. Nat. Mach. Intell. 2019, 1, 446–452. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Zhao, C.; Zhang, Y.; Zhu, Y.; Fan, J.; Zhao, J. C-Balls: A Modular Soft Robot Connected and Driven via Magnet Forced. J. Physics Conf. Ser. 2019, 1207, 012006. [Google Scholar] [CrossRef] [Green Version]
- Hu, X.; Ge, Z.; Wang, X.; Jiao, N.; Tung, S.; Liu, L. Multifunctional thermo-magnetically actuated hybrid soft millirobot based on 4D printing. Compos. Part B Eng. 2022, 228, 109451. [Google Scholar] [CrossRef]
- Park, J.E.; Jeon, J.; Cho, J.H.; Won, S.; Jin, H.-J.; Lee, K.H.; Wie, J.J. Magnetomotility of untethered helical soft robots. RSC Adv. 2019, 9, 11272–11280. [Google Scholar] [CrossRef] [PubMed]
- Miriyev, A.; Stack, K.; Lipson, H. Soft material for soft actuators. Nat. Commun. 2017, 8, 596. [Google Scholar] [CrossRef] [Green Version]
- Gariya, N.; Kumar, P. A review on soft materials utilized for the manufacturing of soft robots. Mater. Today Proc. 2021, 46, 11177–11181. [Google Scholar] [CrossRef]
- Thuruthel, T.G.; Shih, B.; Laschi, C.; Tolley, M.T. Soft robot perception using embedded soft sensors and recurrent neural networks. Sci. Robot. 2019, 4, eaav1488. [Google Scholar] [CrossRef]
- Jin, X.; Feng, C.; Ponnamma, D.; Yi, Z.; Parameswaranpillai, J.; Thomas, S.; Salim, N.V. Review on exploration of graphene in the design and engineering of smart sensors, actuators and soft robotics. Chem. Eng. J. Adv. 2020, 4, 100034. [Google Scholar] [CrossRef]
- Koh, J.-S.; An, S.-M.; Cho, K.-J. Finger-sized climbing robot using artificial proleg. In Proceedings of the 2010 3rd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics, Tokyo, Japan, 26–29 September 2010; pp. 610–615. [Google Scholar] [CrossRef]
- Koh, J.-S.; Cho, K.-J. Omega-Shaped Inchworm-Inspired Crawling Robot With Large-Index-and-Pitch (LIP) SMA Spring Actuators. IEEE/ASME Trans. Mechatron. 2013, 18, 419–429. [Google Scholar] [CrossRef]
- Kadir, M.R.A.; Dewi, D.E.O.; Jamaludin, M.N.; Nafea, M.; Ali, M.S.M. A multi-segmented shape memory alloy-based actuator system for endoscopic applications. Sens. Actuators A Phys. 2019, 296, 92–100. [Google Scholar] [CrossRef]
- Wang, W.; Tang, Y.; Li, C. Controlling bending deformation of a shape memory alloy-based soft planar gripper to grip deformable objects. Int. J. Mech. Sci. 2021, 193, 106181. [Google Scholar] [CrossRef]
- Hošovský, A.; Piteľ, J.; Židek, K.; Tóthová, M.; Sárosi, J.; Cveticanin, L. Dynamic characterization and simulation of two-link soft robot arm with pneumatic muscles. Mech. Mach. Theory 2016, 103, 98–116. [Google Scholar] [CrossRef]
- Miao, Y.; Dong, W.; Du, Z. Design of a Soft Robot with Multiple Motion Patterns Using Soft Pneumatic Actuators. IOP Conf. Series Mater. Sci. Eng. 2017, 269, 012013. [Google Scholar] [CrossRef] [Green Version]
- Ohta, P.; Valle, L.; King, J.; Low, K.; Yi, J.; Atkeson, C.G.; Park, Y.-L. Design of a Lightweight Soft Robotic Arm Using Pneumatic Artificial Muscles and Inflatable Sleeves. Soft Robot. 2018, 5, 204–215. [Google Scholar] [CrossRef] [Green Version]
- Qin, L.; Liang, X.; Huang, H.; Chui, C.K.; Yeow, R.C.-H.; Zhu, J. A Versatile Soft Crawling Robot with Rapid Locomotion. Soft Robot. 2019, 6, 455–467. [Google Scholar] [CrossRef]
- Li, S.; Vogt, D.M.; Rus, D.; Wood, R.J. Fluid-driven origami-inspired artificial muscles. Proc. Natl. Acad. Sci. USA 2017, 114, 13132–13137. [Google Scholar] [CrossRef] [Green Version]
- Shintake, J.; Rosset, S.; Schubert, B.; Floreano, D.; Shea, H. Versatile Soft Grippers with Intrinsic Electroadhesion Based on Multifunctional Polymer Actuators. Adv. Mater. 2016, 28, 231–238. [Google Scholar] [CrossRef]
- Li, T.; Li, G.; Liang, Y.; Cheng, T.; Dai, J.; Yang, X.; Liu, B.; Zeng, Z.; Huang, Z.; Luo, Y.; et al. Fast-moving soft electronic fish. Sci. Adv. 2017, 3, e1602045. [Google Scholar] [CrossRef] [Green Version]
- Terryn, S.; Langenbach, J.; Roels, E.; Brancart, J.; Bakkali-Hassani, C.; Poutrel, Q.-A.; Georgopoulou, A.; Thuruthel, T.G.; Safaei, A.; Ferrentino, P.; et al. A review on self-healing polymers for soft robotics. Mater. Today 2021, 47, 187–205. [Google Scholar] [CrossRef]
- Lee, Y.; Song, W.; Sun, J.-Y. Hydrogel soft robotics. Mater. Today Phys. 2020, 15, 100258. [Google Scholar] [CrossRef]
- Ijaz, S.; Li, H.; Hoang, M.C.; Kim, C.-S.; Bang, D.; Choi, E.; Park, J.-O. Magnetically actuated miniature walking soft robot based on chained magnetic microparticles-embedded elastomer. Sens. Actuators A Phys. 2020, 301, 111707. [Google Scholar] [CrossRef]
- Eshaghi, M.; Ghasemi, M.; Khorshidi, K. Design, manufacturing and applications of small-scale magnetic soft robots. Extreme Mech. Lett. 2021, 44, 101268. [Google Scholar] [CrossRef]
- Venkiteswaran, V.K.; Samaniego, L.F.P.; Sikorski, J.; Misra, S. Bio-Inspired Terrestrial Motion of Magnetic Soft Millirobots. IEEE Robot. Autom. Lett. 2019, 4, 1753–1759. [Google Scholar] [CrossRef] [Green Version]
- Zhang, P.; Zhou, Q. Voice coil based hopping mechanism for microrobot. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3001–3006. [Google Scholar] [CrossRef]
- Loepfe, M.; Schumacher, C.M.; Lustenberger, U.B.; Stark, W.J. An Untethered, Jumping Roly-Poly Soft Robot Driven by Combustion. Soft Robot. 2015, 2, 33–41. [Google Scholar] [CrossRef]
- Yang, Y.; Ye, X.; Guo, S. A new type of jellyfish-like microrobot. In Proceedings of the IEEE International Conference on Integration Technology (ICIT’07), Shenzhen, China, 20–24 March 2007; pp. 673–678. [Google Scholar] [CrossRef]
- Chen, Y.-T.; Yen, J.-Y.; Liu, S.-H. Sensor fusion in a Six-legged Bio-mimicking Robot. IFAC Proc. Vol. 2008, 41, 15624–15629. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.-Y.; Zhang, Y.; Fu, X.-J.; Xiang, G.-S. Design and Kinematic Analysis of a Novel Humanoid Robot Eye Using Pneumatic Artificial Muscles. J. Bionic Eng. 2008, 5, 264–270. [Google Scholar] [CrossRef]
- Wakimoto, S.; Ogura, K.; Suzumori, K.; Nishioka, Y. Miniature soft hand with curling rubber pneumatic actuators. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 556–561. [Google Scholar] [CrossRef]
- Shepherd, R.F.; Ilievski, F.; Choi, W.; Morin, S.A.; Stokes, A.A.; Mazzeo, A.D.; Chen, X.; Wang, M.; Whitesides, G.M. Multigait soft robot. Proc. Natl. Acad. Sci. USA 2011, 108, 20400–20403. [Google Scholar] [CrossRef]
- Yamaguchi, A.; Takemura, K.; Yokota, S.; Edamura, K. A robot hand using electro-conjugate fluid: Grasping experiment with balloon actuators inducing a palm motion of robot hand. Sens. Actuators A Phys. 2012, 174, 181–188. [Google Scholar] [CrossRef]
- Seok, S.; Onal, C.D.; Cho, K.-J.; Wood, R.J.; Rus, D.; Kim, S. Meshworm: A Peristaltic Soft Robot With Antagonistic Nickel Titanium Coil Actuators. IEEE/ASME Trans. Mechatron. 2013, 18, 1485–1497. [Google Scholar] [CrossRef]
- Felton, S.M.; Tolley, M.T.; Onal, C.D.; Rus, D.; Wood, R.J. Robot self-assembly by folding: A printed inchworm robot. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 277–282. [Google Scholar] [CrossRef]
- Mao, S.; Dong, E.; Jin, H.; Xu, M.; Zhang, S.; Yang, J.; Low, K.H. Gait study and pattern generation of a starfish-like soft robot with flexible rays actuated by SMAs. J. Bionic Eng. 2014, 11, 400–411. [Google Scholar] [CrossRef]
- Kim, H.-I.; Han, M.-W.; Song, S.-H.; Ahn, S.-H. Soft morphing hand driven by SMA tendon wire. Compos. Part B Eng. 2016, 105, 138–148. [Google Scholar] [CrossRef]
- Rodrigue, H.; Wang, W.; Kim, D.-R.; Ahn, S.-H. Curved shape memory alloy-based soft actuators and application to soft gripper. Compos. Struct. 2017, 176, 398–406. [Google Scholar] [CrossRef]
- Modabberifar, M.; Spenko, M. A shape memory alloy-actuated gecko-inspired robotic gripper. Sens. Actuators A Phys. 2018, 276, 76–82. [Google Scholar] [CrossRef]
- Zou, J.; Lin, Y.; Ji, C.; Yang, H. A Reconfigurable Omnidirectional Soft Robot Based on Caterpillar Locomotion. Soft Robot. 2018, 5, 164–174. [Google Scholar] [CrossRef] [PubMed]
- Cao, J.; Liang, W.; Ren, Q.; Gupta, U.; Chen, F.; Zhu, J. Modelling and Control of a Novel Soft Crawling Robot Based on a Dielectric Elastomer Actuator. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 1–9. [Google Scholar] [CrossRef]
- Feng, N.; Wang, H.; Hu, F.; Gouda, M.A.; Gong, J.; Wang, F. A fiber-reinforced human-like soft robotic manipulator based on sEMG force estimation. Eng. Appl. Artif. Intell. 2019, 86, 56–67. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Hu, D.; Yang, L. Actuation Mechanisms and Applications for Soft Robots: A Comprehensive Review. Appl. Sci. 2023, 13, 9255. https://doi.org/10.3390/app13169255
Li W, Hu D, Yang L. Actuation Mechanisms and Applications for Soft Robots: A Comprehensive Review. Applied Sciences. 2023; 13(16):9255. https://doi.org/10.3390/app13169255
Chicago/Turabian StyleLi, Weidong, Diangang Hu, and Lei Yang. 2023. "Actuation Mechanisms and Applications for Soft Robots: A Comprehensive Review" Applied Sciences 13, no. 16: 9255. https://doi.org/10.3390/app13169255