
Summarization of Remaining Life Prediction Methods for Special Power Plants

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
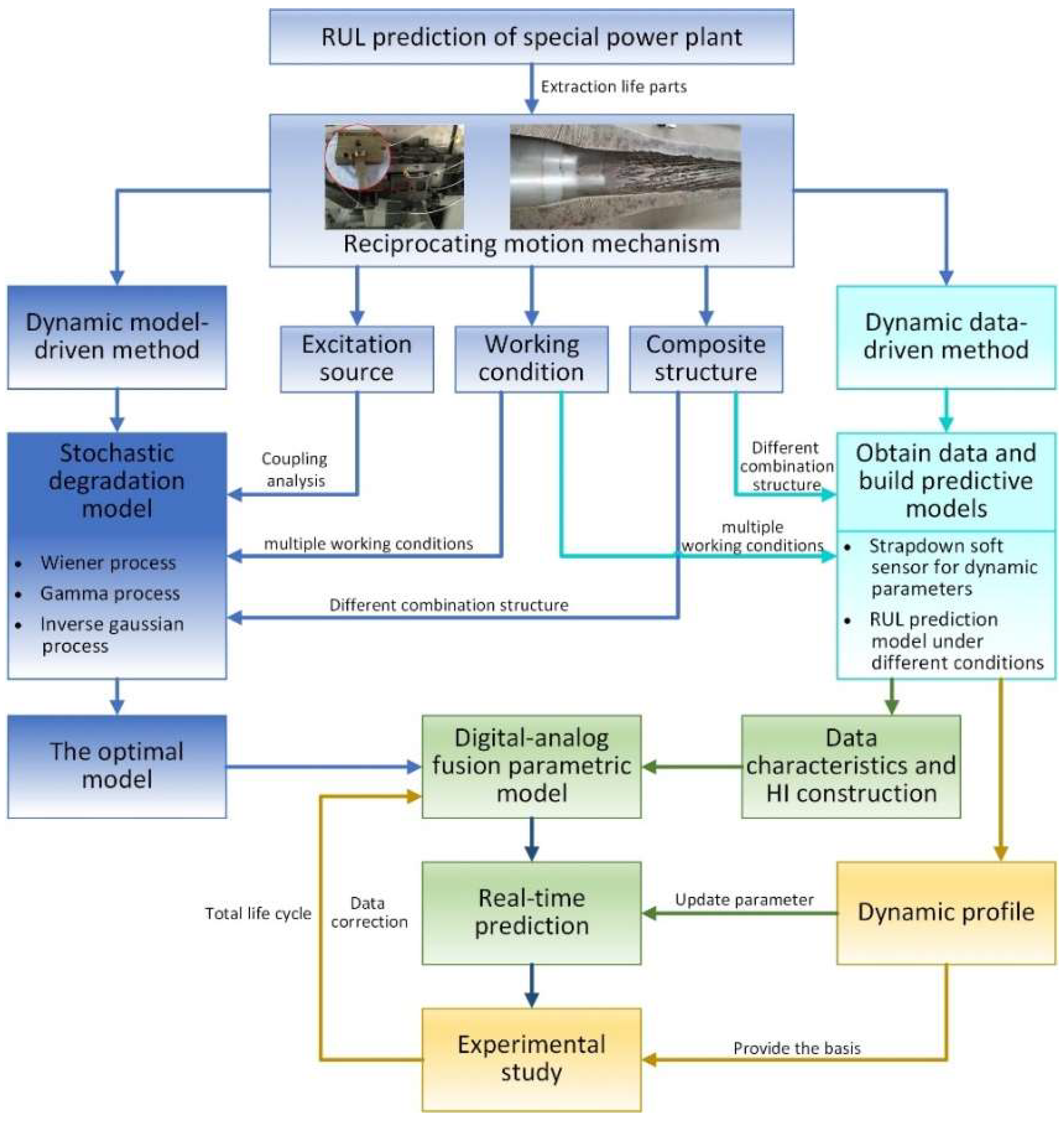
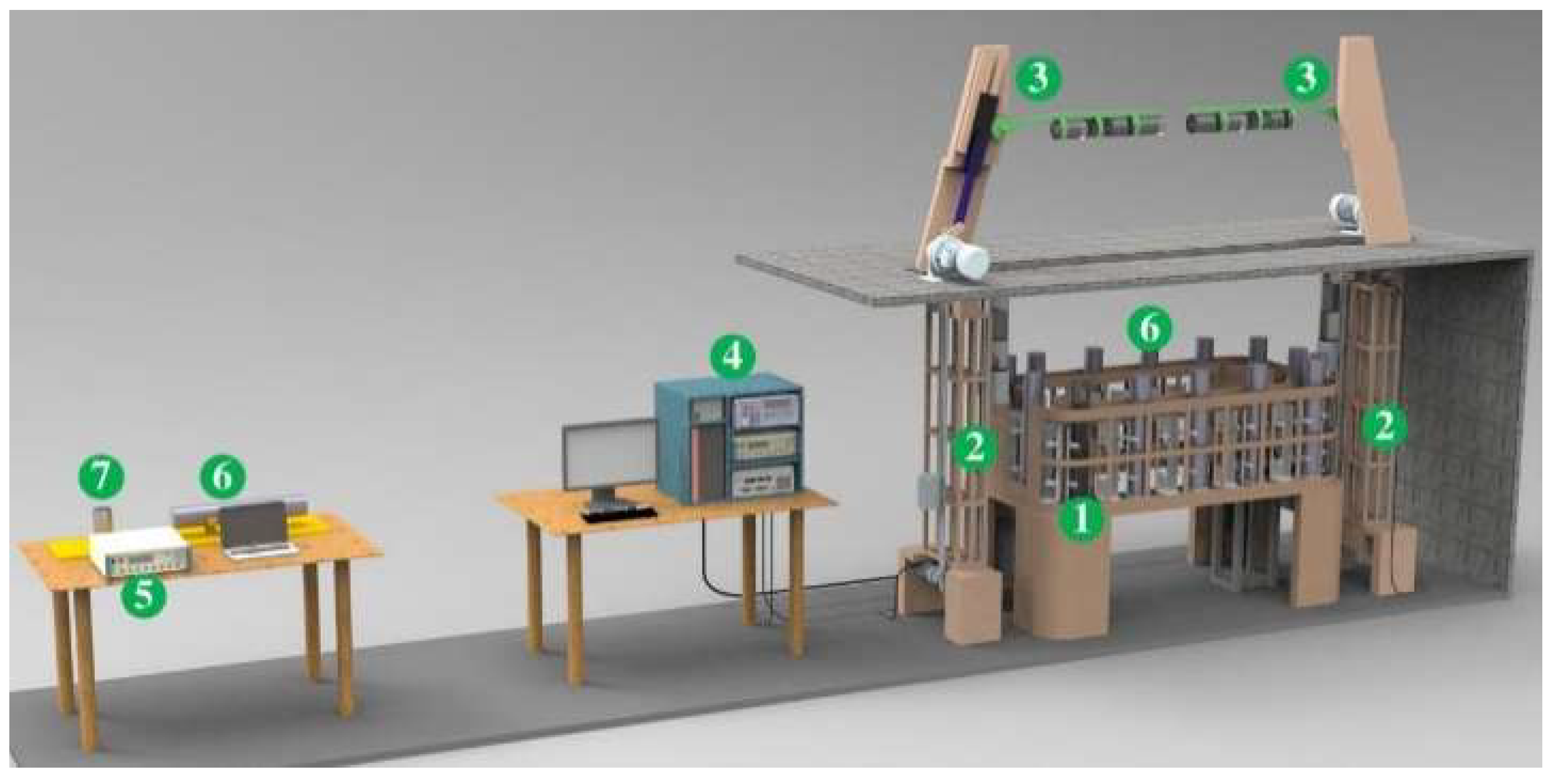
- Different from rotating motion mechanisms such as those of gear boxes and rolling bearings, most parts of special power plants with structural wear or damage are reciprocating motion parts (Figure 1 and Figure 2), and the related research results [6,7] are not fully applicable in this field. Practical experience has shown that, due to the particularities of the working environment and the complexity of the task profile, the “internal injury” of special power plants is affected not only by the material and structure but also by dynamic parameters such as vibration, impact, and pressure in the process of work [8,9,10]. The degradation mechanism of these influencing factors in the reciprocating motion process is due to the different carriers of action. In the existing research process, the research theory of ordinary power plants cannot be fully followed, and improvements need to be made based on the motion characteristics of reciprocating mechanisms [11]. Therefore, the mapping relationship between a dynamic model constructed by integrating multiple degradation factors and equipment RUL is one of the key challenges in current research [12].
- (2)
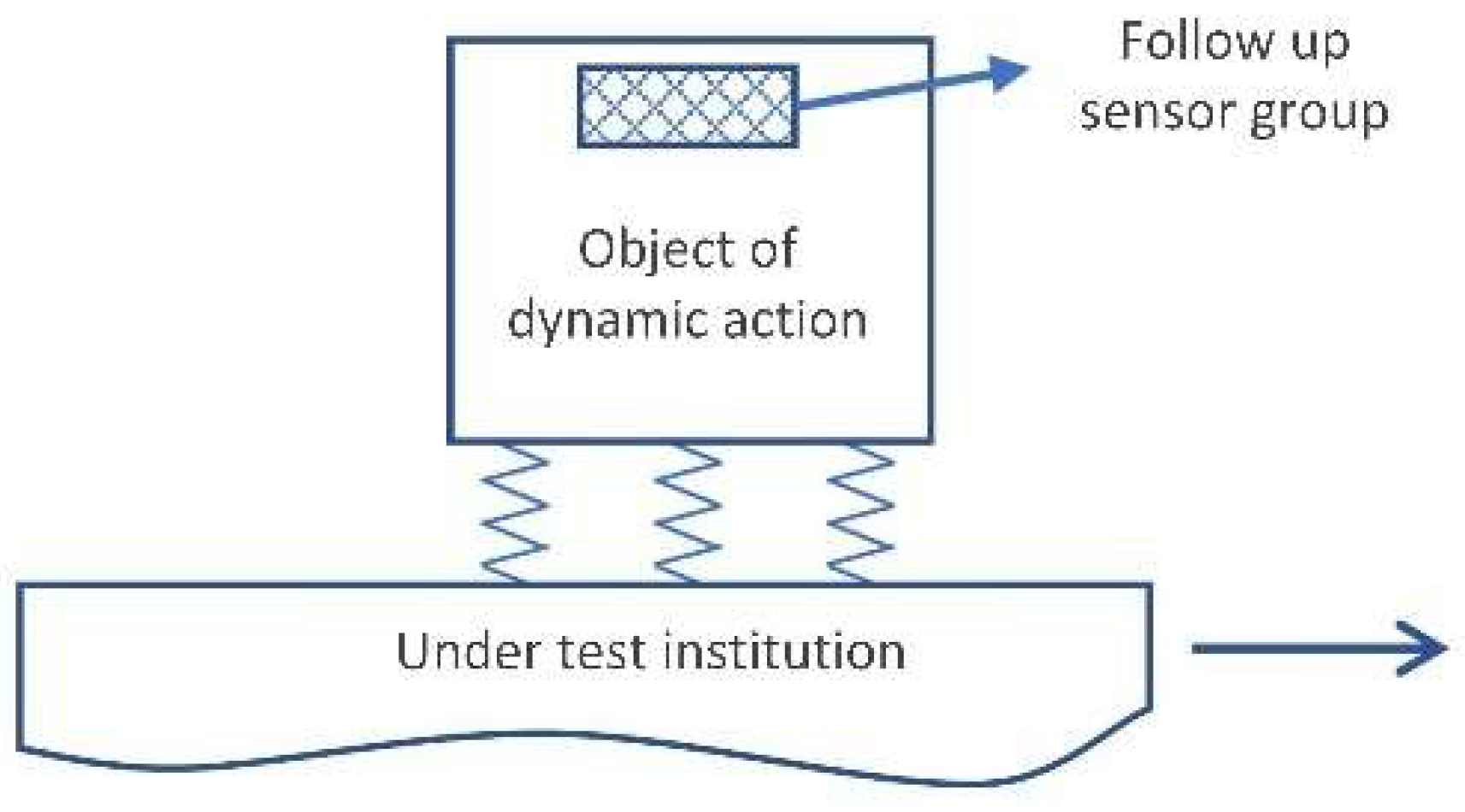
- After constructing the mapping relationship between the dynamic model and the RUL of mechanical equipment, it is necessary to build a prediction model through multi-scale and multi-source data monitoring to realize the real-time prediction of the RUL of special power plants [13]. However, due to the generally poor working conditions of special power plants, traditional measurement methods for the dynamic parameters of power plants are usually not applicable in this environment, making it difficult to directly measure the dynamic parameters. This means that data acquisition methods are lacking [14]. At the same time, the traditional method of installing wired or wireless sensors at key structural points, collecting operational data, and analyzing modes or responses in power plants cannot effectively and objectively reflect the actual dynamic parameters, such as the vibration, impact, pressure, etc., of the special power plants’ internal mechanisms due to the complex transmission characteristics of the internal and external mechanisms. At this point, it is necessary to use soft-sensing technology to indirectly obtain dynamic data [15]. The so-called soft measurement method aims to obtain dynamic parameters that are difficult to measure for special power plants. Through the selection of auxiliary variables, data acquisition and processing, the construction of soft measurement models, and real-time correction, these parameters can be inferred or estimated [16]. Therefore, the question of how to soft-measure the dynamic parameters of special power plants and construct a mapping relationship between dynamic data and RUL is currently one of the key challenges in research [17].
- (3)
- Compared with ordinary power plants, the operating conditions of special power plants have state characteristics such as time-varying and discontinuous status. Moreover, their dynamic parameter measurement data have the characteristics of being non-stationary, single-measurement data and imbalanced, multiple-measurement data [18]. These specific features result in the inability to accurately characterize the complexity and randomness of the degradation process of conventional power plants based on their mapping relationship with RUL. The mapping relationship between the dynamic data established based on conventional power plants and RUL lacks interpretability, generalization, etc. [19]. In view of this, by combining the dynamic data of special plants with their structural characteristics and integrating the dynamic model-driven RUL prediction method with the dynamic data-driven RUL prediction method, breakthroughs can be made in terms of the interpretability and generalization of the model, and the expected results can be obtained [20]. Therefore, the question of how to effectively integrate dynamic models and data in order to establish RUL prediction methods is currently one of the key challenges in research [21,22].
2. Research Status at Home and Abroad
2.1. State of Research on Dynamic Model-Driven RUL Prediction Methods
2.2. State of Research on Dynamic Data-Driven RUL Prediction Methods
- (1)
- A convolutional neural network can process a large amount of raw data, which makes it suitable for large model computing processes.
- (2)
- Convolutional neural networks can realize automatic feature extraction and recognition without supervision and without human intervention.
- (3)
- A convolutional neural network has a strong processing ability with regard to mechanical signals, vibration signals, noise signals, optical signals, and other high-dimensional signals, and it has the function of automatic noise reduction during data processing.
- (4)
- A convolutional neural network has a relatively small number of parameters, which makes training more convenient and efficient and facilitates the construction of a deeper network structure.
- (5)
- A convolutional neural network is insufficient for data on time series feature extraction ability. Special power plants and other types of equipment with random degradation processes regarding the data information and characteristics of the equipment are often time-series-related, making it easy to lose important feature factors.
- (6)
- Convolutional neural network RUL prediction cannot quantitatively provide RUL uncertainty; thus, in this stage of the convolutional neural network, RUL prediction is often used in combination with other intelligent algorithms.
- (1)
- A deep belief network can solve the training difficulty problems of the depth model. Through layer-by-layer pre-training and the reverse fine-tuning strategy, the feature representation and extraction of data ranging from shallow to deep can be realized, and the distributed features of the input data can be discovered. The use of this method in the time domain signal does not need to satisfy the requirements of periodicity. The information from data on deep-level feature extraction plays a greater role.
- (2)
- The short-term prediction performance of the deep belief network is better, while the long-term prediction performance is worse.
- (3)
- The RUL prediction results obtained with deep belief networks cannot reflect the uncertainty of the prediction results and generally need to be combined with other prediction methods to reflect the uncertainty of the prediction results.
- (1)
- In RUL prediction, recurrent neural networks are able to fuse the original learning samples with the updated learning model, which can retrain the samples and has the characteristics of a fast convergence speed and high stability while improving accuracy.
- (2)
- Recurrent neural networks have certain advantages in dealing with time-series data or before-and-after dependent degradation data but struggle to analyze and process multidimensional data.
- (3)
- Recurrent neural networks can effectively reduce the uncertainty caused by environmental perturbations through their unique gate structure. However, they can only realize the point estimation of RUL, and it is difficult to assess the confidence of the prediction results. The existing studies focus on the effect of network training rather than the time-varying stochastic and dynamic characteristics inherent in equipment performance degradation.
- (1)
- Transfer learning can ignore the requirements regarding the same feature distribution of the model data and application data in traditional degradation models and data-driven models. The full-life performance degradation data of similar equipment types can be utilized, and their features can be transferred to the historical data of the target equipment through learning to realize the RUL prediction of the target equipment.
- (2)
- In this stage, transfer learning mainly focuses on research based on the deep transfer model and feature transfer model. The former reduces the complexity of the deep network to a certain extent, but the transfer effect mostly depends on the quality of the trained network. The latter requires prior knowledge of the characteristic differences in data distribution between the domains and an exploration of suitable mapping models. There are fewer reasonable explanations for transfer components and transfer tasks, and the theoretical research base is weak.
- (3)
- The effect of transfer learning is related to factors such as the volume of data, the quality of data, and the selection of transfer source domains. The applicability of the model under different conditions varies to some extent, and an adaptive adjustment of the transfer parameters is mostly used at present, which leads to a lack of theoretical explanations for the parameters of the model.
- (4)
- If there are large, dynamic changes in the learning source domain and target prediction domain of transfer learning, the iterative updating performance of transfer learning will become weak, resulting in a low prediction performance. The addition of an intermediate domain can reduce the impacts of dynamic changes on the transfer learning model, but the intermediate domain increases the complexity of the model; thus, the balancing of these two factors is a research focus at present.
2.3. State of Research on Data–Model-Fusion-Driven RUL Prediction Methods
2.4. Existing Problems
- (1)
- The complexity of the special power plant and the variability of the operating conditions cause the coupling interference of a variety of degradation factors, which is not conducive to describing the degradation trends in the plant’s dynamic performance. This makes it difficult to obtain an accurate and generalized degradation model.
- (2)
- The RUL prediction of data-driven mechanical equipment requires one to monitor big data; thus, the data acquisition method is the first problem that needs to be solved. The existing data acquisition method often uses mechanical equipment with wired or wireless sensor external measuring equipment that runs incentive response parameters. This method of obtaining data leads to a high degree of random noise, and only the internal mechanism dynamic process is passed on to the external data. Therefore, this method cannot directly and effectively reflect the actual dynamic state of the internal mechanism.
- (3)
- For special power plants, the RUL prediction method driven by the dynamic model mainly builds a parametric mathematical model based on the dynamic degradation process but fails to combine the real-time monitoring data. This makes it difficult to reflect the actual state of the current operation; therefore, the prediction deviation is significant. The RUL prediction method driven by dynamic data lacks a strict dynamic theoretical basis and interpretability and has a poor generalization ability. Additionally, it is difficult to design hyperparameters for the network.
3. Future Research Directions
3.1. Dynamic Model-Driven RUL Prediction Methods
- (1)
- A study was carried out on a stochastic degradation model of dynamics under single-factor stochastic excitation;
- (2)
- A study was conducted on a stochastic degradation model of dynamics under multi-factor coupling excitation;
- (3)
- A study was conducted on a random degradation model under multi-working conditions;
- (4)
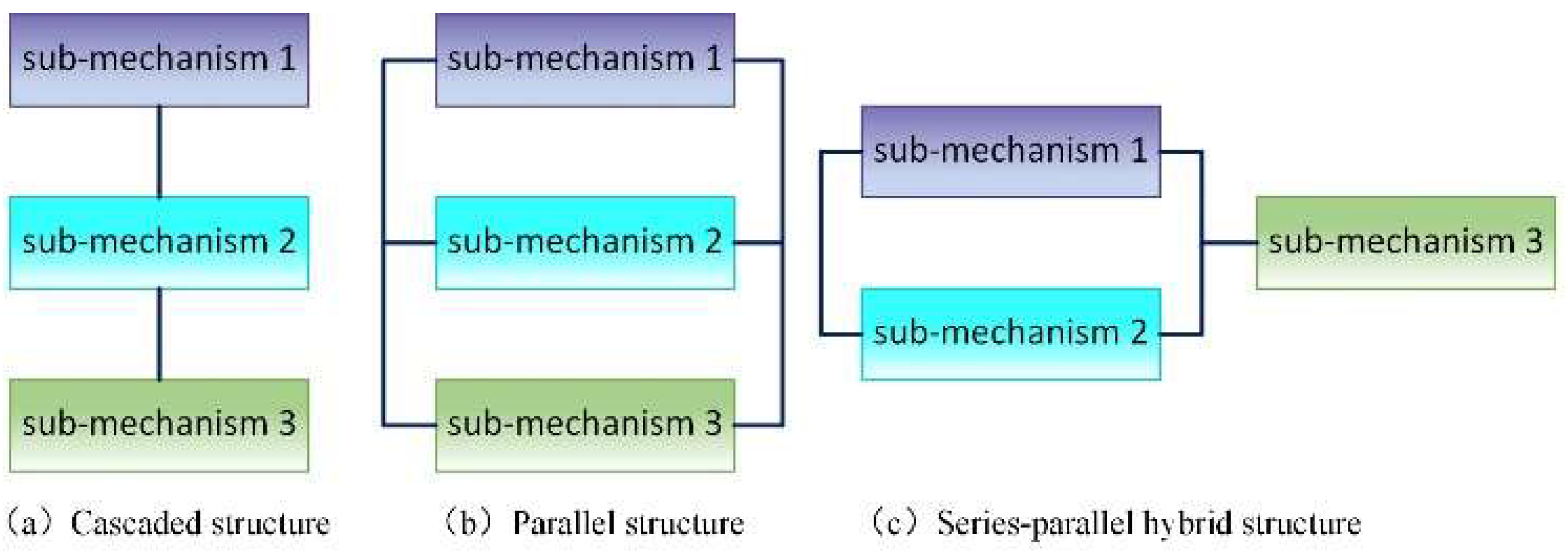
- A study was conducted on a stochastic degradation model with a combinatorial structure.
3.1.1. Dynamic Stochastic Degradation Process under Single-Factor Random Excitation
3.1.2. Dynamic Stochastic Degradation Process under Multi-Factor Coupling Excitation
3.1.3. RUL Prediction Model under Multiple Working Conditions
3.1.4. RUL Prediction Model for Different Combined Structures
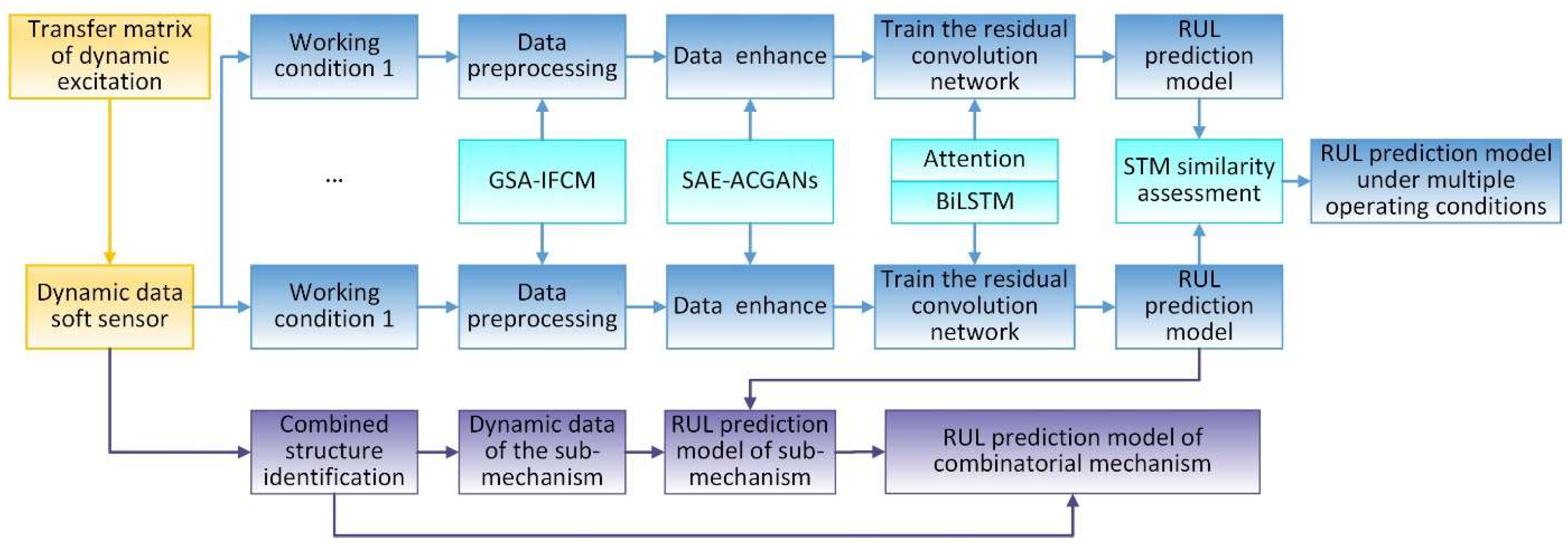
3.2. Dynamic Data-Driven RUL Prediction Method
- (1)
- Theoretical research is conducted on the soft measurement method for the follow-up dynamic parameters;
- (2)
- Research is conducted on RUL prediction methods using small samples and non-equilibrium data conditions;
- (3)
- Research is conducted on the RUL prediction method driven by dynamic data under multiple working conditions;
- (4)
- Research is conducted on the RUL prediction method driven by dynamic data under different combination structures.
3.2.1. Theoretical Research on the Soft Measurement Method of Follow-Up Dynamic Parameters
3.2.2. RUL Prediction Method under Small-Sample and Non-Equilibrium Data Conditions
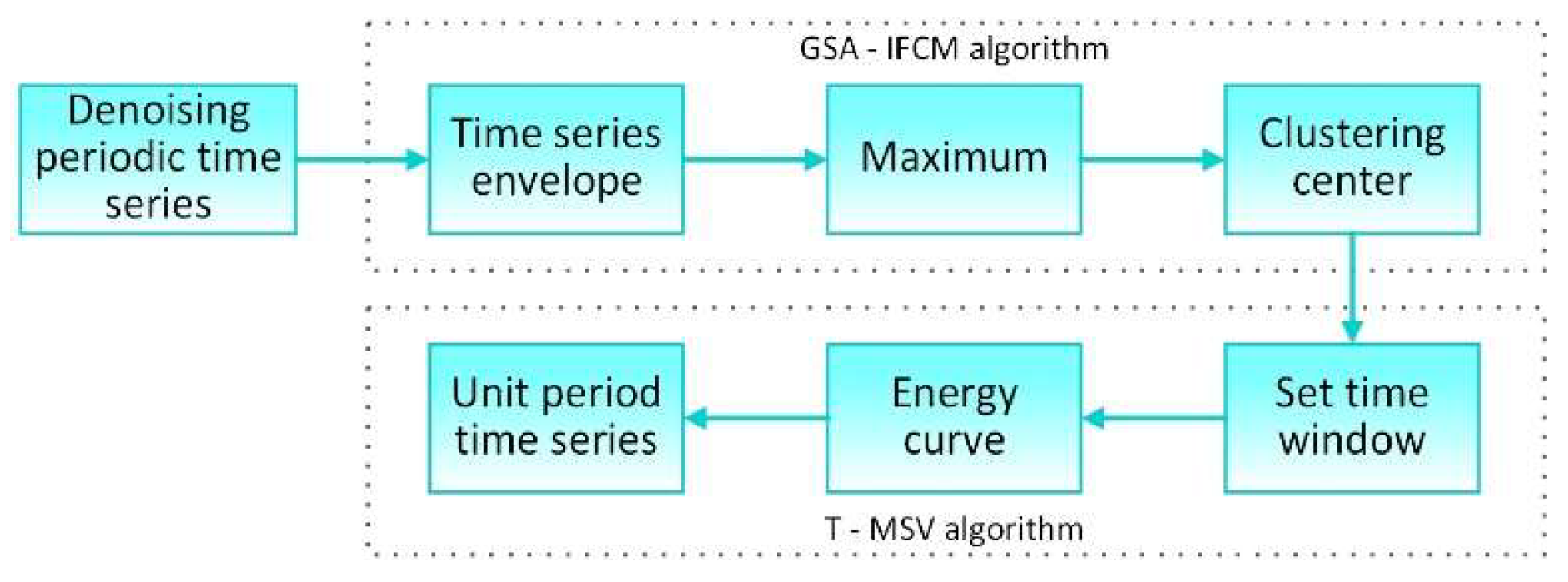
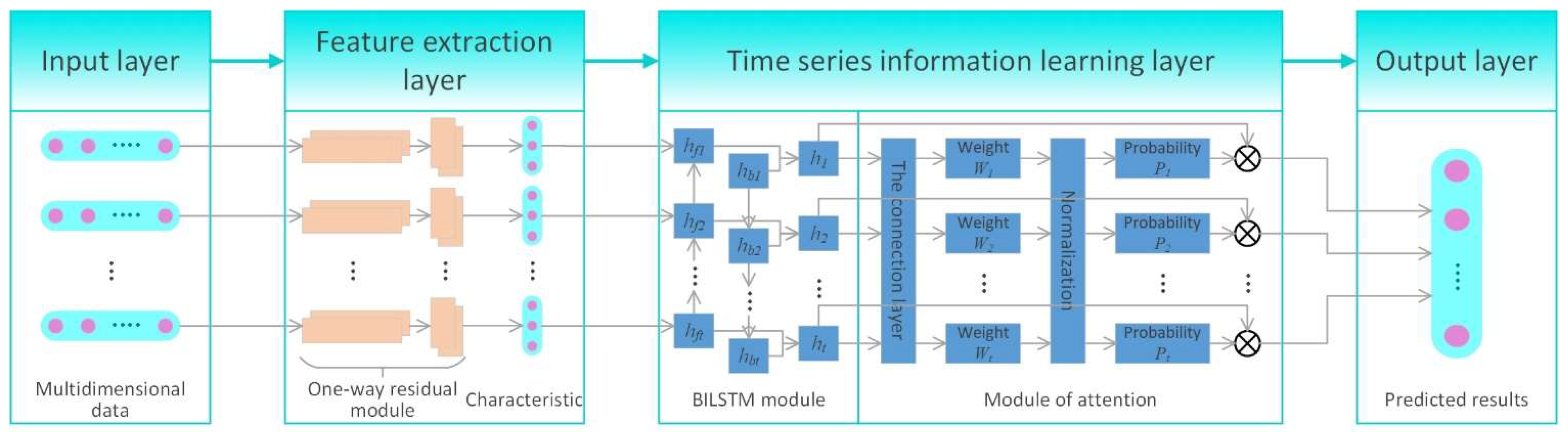
- (1)
- Data preprocessing based on the GSA-IFCM method.
- (2)
- Data enhancement based on the SAE-ACGAN method.
- (3)
- Construction of an RUL prediction model based on the RCNN-ABi-LSTM method.
3.2.3. RUL Prediction Method under Multi-Working Conditions
3.2.4. RUL Prediction Methods under Different Combined Structure Conditions
3.3. RUL Prediction Method Driven by Data–Model Fusion
- (1)
- Research on the construction method of health indicators under multi-factor coupling excitation;
- (2)
- Research on the parameterized RUL prediction model based on health indicators;
- (3)
- Research on the real-time prediction method of RUL based on complex task profiles.
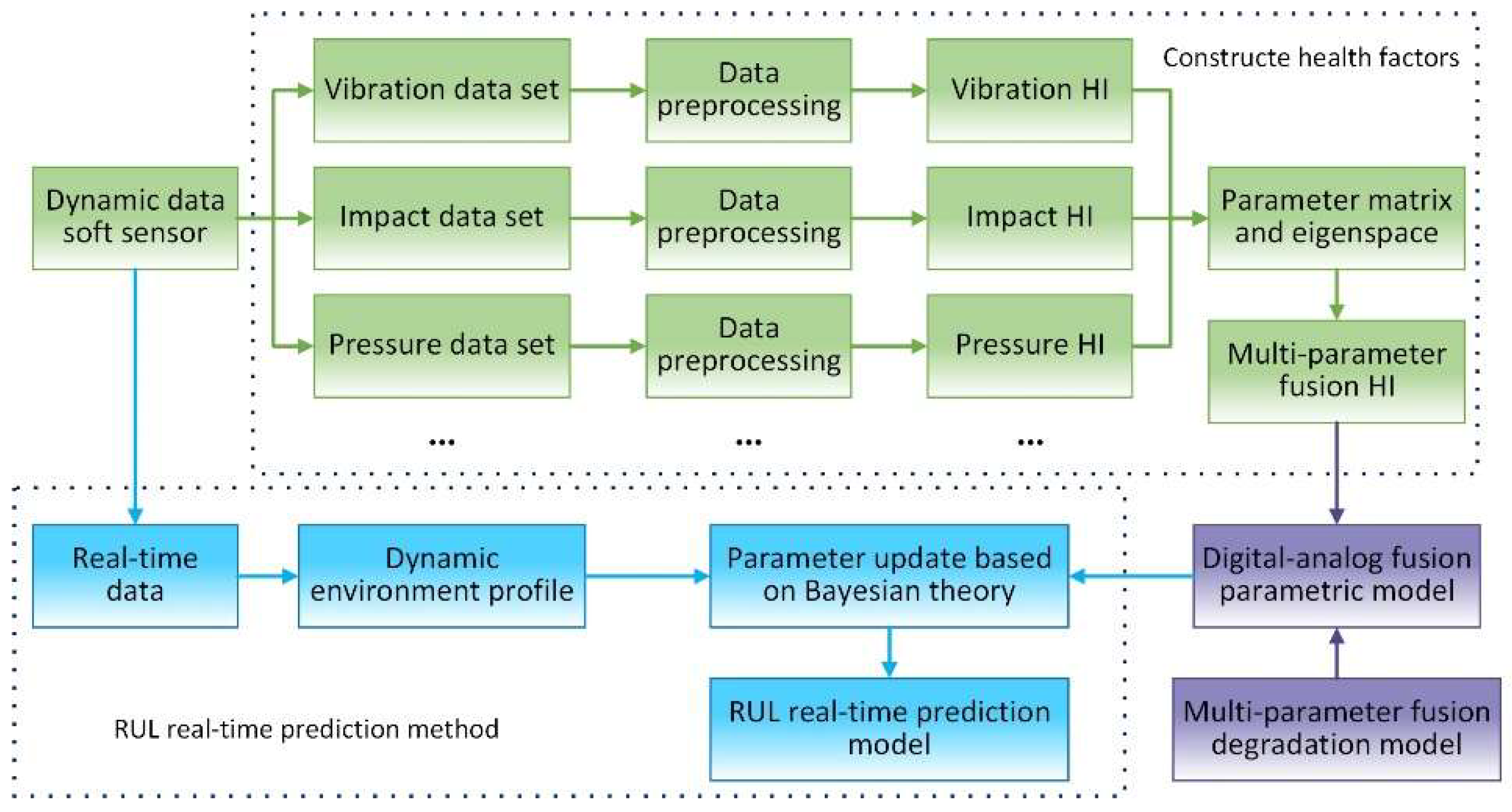
- (1)
- Study of health indicators under multi-factor coupling incentives
- (a)
- The dynamic excitation transfer matrix constructed based on the research contents described in Section 3.2 is used to infer the actual dynamic data of the device.
- (b)
- Considering the degradation process of the dynamic performance of the device as a random process, the parameter variables of the stochastic processes are taken as the health indicators of institutions. Vibration HI, impact HI, pressure HI, etc., are extracted based on the vibration data set, impact data set, and pressure data set, respectively. These HIs have practical physical significance, and the change process is highly interpretable.
- (c)
- The parameter matrix is constructed using each HI constructed based on the random process parameter (b), and the eigenspace is constructed by solving the eigenvalues of the parameter matrix.
- (d)
- After optimizing the feature space with the parameters, HI can be fused with multiple parameters. This parameter contains the feature information on dynamic performance degradation, and the degree of degradation is positively related to its value.
- (2)
- Research on the RUL parametric prediction model based on health indicators
- (3)
- Research on the real-time prediction method of RUL for a complex task profile
- (a)
- The real-time dynamic measurement data of a complex task profile can be extracted and preprocessed. The actual dynamic data of special power plants can be obtained, and the dynamic section can be constructed.
- (b)
- One extracts the random parameters based on the dynamic profile and the parametric model constructed in (2).
- (c)
- Based on Bayesian theory, the random parameters of the data–model-fusion-parameterized model are updated to obtain a real-time RUL prediction model for special power plants.
3.4. Research on RUL Prediction Tests Aided by Soft Measurements
- (1)
- Trial production and test research on soft measuring equipment with follow-up dynamic parameters;
- (2)
- Research measuring the full life-cycle dynamic parameters of the special power plant.
- (1)
- Trial production and the testing of soft measuring equipment for the accompanying dynamic parameters.
- (2)
- Testing of dynamic parameters’ measurement throughout the whole life-cycle of special power plants.
4. Conclusions
- (1)
- On the basis of the existing research on random degradation models, the mechanism and theory of the effects of dynamic degradation factors could be explored further, and a degradation effect model that is more aligned with special power plants could be constructed, objectively and effectively furthering RUL prediction research for special power plants.
- (2)
- Focusing on special power plants, a reasonable and effective soft sensor method could be designed for dynamic environments to directly measure dynamic data and then predict the RUL based on the dynamic data.
- (3)
- Furthermore, the dynamic models and data should be effectively fused to develop an RUL prediction method for special power plants with interpretability and generalization ability.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fei, H.; Hu, C.H.; Si, X.S.; Zhang, J.X.; Pang, Z.N.; Zhang, P. Summary of machine learning-based device RUL prediction methods. J. Mech. Eng. 2019, 55, 1–13. [Google Scholar] [CrossRef]
- Tu, S.D. Advanced design and manufacturing technology frontier: The reliability guarantee of important equipment column preface. J. Mech. Eng. 2021, 57, 1–13. [Google Scholar]
- Meng, G.; You, M.Y. Review on condition-based equipment RUL prediction and preventive maintenance scheduling. J. Vib. Shock. 2011, 30, 1–11. [Google Scholar] [CrossRef]
- Xuan, F.Z.; Zhu, M.L.; Wang, G.B. Retrospect and prospect on century-long research of structural fatigue. J. Mech. Eng. 2021, 57, 26–51. [Google Scholar] [CrossRef]
- Feng, Z.P.; Song, X.G.; Xue, D.X.; Xie, Y.; Deng, D.F. Survey of vibration fault diagnosis of rotational machinery. J. Vib. Shock 2001, 20, 34–39. [Google Scholar] [CrossRef]
- Deng, F.Y.; Bi, Y.; Liu, Y.Q.; Yang, S. Deep-Learning-Based Remaining Useful Life Prediction Based on a Multi-Scale Dilated Convolution Network. Mathematics 2021, 9, 3035. [Google Scholar] [CrossRef]
- Ragab, M.; Chen, Z.H.; Wu, M. Attention-Based Sequence to Sequence Model for Machine Remaining Useful Life Prediction. Neurocomputing 2021, 466, 58–68. [Google Scholar] [CrossRef]
- Han, Z.Y.; Zou, Y.J.; Zhu, W.H.; Pang, S.W. Evolution of the spacecraft mechanical environment predication & test technology. Sci. Sin. Phys. Mech. Astron. 2019, 49, 6–22. [Google Scholar] [CrossRef]
- Becker, T.H.; Kumar, P. Fracture and Fatigue in Additively Manufactured Metals. Acta Mater. 2021, 219, 117240. [Google Scholar] [CrossRef]
- Lucon, E. An Assessment of Different Approaches for Measuring Crack Sizes in Fatigue and Fracture Mechanics Specimens. Theor. Appl. Fract. Mech. 2021, 116, 103119. [Google Scholar] [CrossRef]
- Cheng, X.L.; Zhao, H.; Jiao, M.; Ye, H.F.; Li, L.C. Dynamic response characteristics of the protection system for a projectile borne recorder under high impact loading. Explos. Shock. Waves 2019, 39, 117–125. [Google Scholar] [CrossRef]
- Wei, S.; Han, Q.K.; Chu, F.L. Review on research of uncertain dynamics for gear system. J. Mech. Eng. 2016, 52, 1–19. [Google Scholar] [CrossRef]
- Kusiak, A. Smart Manufacturing Must Embrace Big Data. Nature 2017, 544, 23–25. [Google Scholar] [CrossRef] [PubMed]
- Xu, Y.X.; Wang, Y.; Yan, T.H.; He, Y.; Wang, J.; Gu, D.; Du, H.; Li, W. Quality-Related Locally Weighted Soft Sensing for Non-Stationary Processes by a Supervised Bayesian Network with Latent Variables. Front. Inform. Technol. Electron. Eng. 2021, 22, 1234–1246. [Google Scholar] [CrossRef]
- Ying, Y.L.; Li, J.C.; Pang, J.L.; Yu, T.; Liu, Y. Review of gas turbine gas-path fault diagnosis and prognosis based on thermodynamic model. Proc. CSEE 2019, 39, 731–743+952. [Google Scholar] [CrossRef]
- Shui, G.S.; Wang, Y.S.; Qu, J.M. Advances in nondestructive test and evaluation of material degradation using nonlinear ultrasound. Adv. Mech. 2005, 35, 52–68. [Google Scholar] [CrossRef]
- Han, X.Y.; Niu, C.P.; He, H.L.; Wu, J.B.; Chen, Z.W. Review of state monitoring and intelligent evaluation technology of electromagnetic circuit breaker. Electrotech. J. 2023, 38, 2191–2210. [Google Scholar] [CrossRef]
- Zhou, J.M.; Yin, W.H.; You, T.; Li, J.H.; Gao, S.; Du, Y.B. Evaluation of data-driven rolling bearings. Mod. Manuf. Eng. 2021, 146–153+160. [Google Scholar] [CrossRef]
- Nor, A.K.M.; Pedapati, S.R.; Muhammad, M.; Leiva, V. Overview of Explainable Artificial Intelligence for Prognostic and Health Management of Industrial Assets Based on Preferred Reporting Items for Systematic Reviews and Meta-Analyses. Sensors 2021, 21, 8020. [Google Scholar] [CrossRef]
- Zhang, B.; Zhu, J.; Su, H. Toward the third generation of artificial intelligence. Sci. Sin. Inform. 2020, 50, 1281–1302. [Google Scholar] [CrossRef]
- Tao, F.; Liu, W.; Zhang, M.; Hu, T.L.; Qi, Q.; Zhang, H.; Sui, F.; Wang, T.; Xu, H.; Huang, Z. Five-dimension digital twin model and its ten applications. Comput. Integr. Manuf. Syst. 2019, 25, 1–18. [Google Scholar] [CrossRef]
- Tao, F.; Liu, W.; Liu, J.; Liu, X.; Liu, Q.; Qu, T.; Hu, T.; Zhang, Z.; Xiang, F.; Xu, W. Digital twin and its potential application exploration. Comput. Integr. Manuf. Syst. 2018, 24, 1–18. [Google Scholar] [CrossRef]
- Villalón-Falcón, A.; Prieto-Moreno, A.; Quiñones-Grueiro, M.; Llanes-Santiago, O. Computational Adaptive Multivariable Degradation Model for Improving the Remaining Useful Life Prediction in Industrial Systems. Comp. Appl. Math. 2022, 41, 48. [Google Scholar] [CrossRef]
- Zhou, F.Y.; Jin, L.P.; Dong, J. Review of convolutional neural network. Chin. J. Comput. 2017, 40, 1229–1251. [Google Scholar]
- Li, N.P.; Cai, X.; Lei, Y.G.; Xu, P.C.; Wang, W.T.; Wang, B. A Model-data-fusion Remaining Useful Life Prediction Method with Multi-sensor Fusion for Machinery. J. Mech. Eng. 2021, 57, 29–37+46. [Google Scholar] [CrossRef]
- Wang, L.B.; Wang, Q.L.; Zhu, Z.; Zhao, Y. Current status and prospects of research on bridge health monitoring technology. China J. Highw. Transp. 2021, 34, 25–45. [Google Scholar] [CrossRef]
- Hu, Y.G.; Liu, H.S.; Shi, P.P.; Chen, X.G.; Fang, C.; Li, H.; Ran, J. Overview of fault diagnosis and life prediction for wind turbine yaw system. Proc. CSEE 2022, 42, 4871–4884. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhang, Y.; Ding, H. Research on key technology of industrial artificial intelligence and its application in predictive maintenance. Acta Autom. Sin. 2020, 46, 2013–2030. [Google Scholar] [CrossRef]
- Wu, B.; Liu, B.J.; Zheng, J.; Wang, T.; Chen, R.; Chen, X.; Zhang, K.; Zou, Z. Strain-Based Health Monitoring and Remaining Life Prediction of Large Caliber Gun Barrel. Measurement 2018, 122, 297–311. [Google Scholar] [CrossRef]
- Lei, F. The Structure Dynamics Analysis of the Inertial Reciprocation Vibration Machine and Its Application. Henan University of Technology. 2010. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?FileName=1016100140.nh&DbName=CDFD2016 (accessed on 15 August 2022).
- Zhang, H.; Li, D.S.; Li, H.N. Progress in finite element model modification: From linear to linearity to nonlinear. Mech. Prog. 2019, 49, 542–575. [Google Scholar] [CrossRef]
- Fei, Q.G.; Li, A.Q.; Zhang, L.M. Study on finite element model updating of nonlinear structures using neural network. J. Astronaut. 2005, 26, 267–269+281. [Google Scholar] [CrossRef]
- Wang, Y.H. Dynamic Analysis of Mechanical Structure with Finite Wlastic Parts. Harbin Institute of Technology. 2016. Available online: https://kns.cnki.net/KCMS/detail/detail.aspx?dbname=CMFD201701&filename=1016774871.nh (accessed on 15 August 2022).
- Li, Y.Y.; Wang, C.; Huang, W.H. Dynamics Analysis of Planar Rigid-Flexible Coupling Deployable Solar Array System with Multiple Revolute Clearance Joints. Mech. Syst. Signal Proc. 2019, 117, 188–209. [Google Scholar] [CrossRef]
- Fan, J.H.; Zhang, D.G.; Shen, H. Research on elastic line method based on absolute nodal coordinate method. Chin. J. Theor. Appl. Mech. 2019, 51, 1455–1465. [Google Scholar] [CrossRef]
- Lu, H.J.; Rui, X.T.; Ding, Y.Y.; Chang, Y.; Chen, Y.H.; Ding, J.G.; Zhang, X.P. A hybrid numerical method for vibration analysis of linear multibody systems with flexible components. Appl. Math. Model. 2022, 101, 748–771. [Google Scholar] [CrossRef]
- Ma, J. Research on Contact-Impact Events between Barrel and Bourrelet of Medium-Large Caliber Howitzers; Nanjing University of Science & Technology: Nanjing, China, 2019. [Google Scholar] [CrossRef]
- Pawlus, W.; Robbersmyr, K.G.; Karimi, H.R.; Fanghol, A. The Performance Investigation of Viscoelastic Hybrid Models in Vehicle Crash Event Representation. IFAC Proc. Vol. 2011, 44, 2138–2143. [Google Scholar] [CrossRef]
- Qian, L.F.; Chen, G.S. The Uncertainty Propagation Analysis of the Projectile-Barrel Coupling Problem. Def. Technol. 2017, 13, 229–233. [Google Scholar] [CrossRef]
- Ma, J.; Qian, L.F. Modeling and Simulation of Planar Multibody Systems Considering Multiple Revolute Clearance Joints. Nonlinear Dyn. 2017, 90, 1907–1940. [Google Scholar] [CrossRef]
- Ding, C.J.; Liu, N.; Zhang, X.Y. A Mesh Generation Method for Worn Gun Barrel and Its Application in Projectile-Barrel Interaction Analysis. Finite Elem. Anal. Des. 2017, 124, 22–32. [Google Scholar] [CrossRef]
- Shen, C.; Zhou, K.D.; Lu, Y.; Li, J.S. Modeling and Simulation of Bullet-Barrel Interaction Process for the Damaged Gun Barrel. Def. Technol. 2019, 15, 972–986. [Google Scholar] [CrossRef]
- Kumar, T.A.; Sidhardha, N.S.G.R.S.; Mathew, A.T.; Devendiran, S.; K.annan, V.; Koka, T.R. Design of Gas Gun Barrel Support Structure by Finite Element Model Updating Using Optimization Techniques. Mater. Today Proc. 2020, 22, 3027–3036. [Google Scholar] [CrossRef]
- Chaturvedi, E. Numerical Investigation of Dynamic Interaction with Projectile and Harmonic Behaviour for T-Finned Machine Gun Barrels. Def. Technol. 2020, 16, 460–469. [Google Scholar] [CrossRef]
- Zhou, J.W. Dynamics and Vibration Control of a Horizontal Axis Wind Turbine Blade and Rotor; Beijing University of Technology: Beijing, China, 2020. [Google Scholar] [CrossRef]
- Zhou, J.W.; Wen, S.R.; Li, F.M.; Zhu, Y. Coupled bending and torsional vibrations of non-uniform thin-walled beams by the transfer differential transform method and experiments. Thin-Walled Struct. 2018, 127, 373–388. [Google Scholar] [CrossRef]
- Ceballes, S.; Abdelkefi, A. Application of Sensitivity Analysis and Uncertainty Quantification Methods on the Dynamic Response of General Nonlocal Beams. Appl. Math. Model. 2021, 97, 322–343. [Google Scholar] [CrossRef]
- Hua, H.L. Study on the Dynamics of Eccentrically Rotating Beam and Axially Moving Cantilever Beam; Nanjing University of Science & Technology: Nanjing, China, 2019. [Google Scholar] [CrossRef]
- Sahraei, A.; Pezeshky, P.; Sasibut, S.; Rong, F.; Mohareb, M. Finite Element Formulation for the Dynamic Analysis of Shear Deformable Thin-Walled Beams. Thin-Walled Struct. 2022, 173, 108989. [Google Scholar] [CrossRef]
- Vo, D.; Borković, A.; Nanakorn, P.; Bui, T.Q. Dynamic Multi-Patch Isogeometric Analysis of Planar Euler–Bernoulli Beams. Comput. Methods Appl. Mech. Eng. 2020, 372, 113435. [Google Scholar] [CrossRef]
- Han, F.; Dan, D.H.; Deng, Z.C. A Dynamic Stiffness-Based Modal Analysis Method for a Double-Beam System with Elastic Supports. Mech. Syst. Signal Process. 2021, 146, 106978. [Google Scholar] [CrossRef]
- Wu, J.G.; Lin, Q.H.; Li, B.M. Dynamic response analysis of conducting rails in electromagnetic rail launcher. J. Vib. Eng. 2019, 32, 120–127. [Google Scholar] [CrossRef]
- Shams, S.; Torabi, A.R.; Narab, M.F.; Atashgah, M.A.A. Free Vibration Analysis of a Laminated Beam Using Dynamic Stiffness Matrix Method Considering Delamination. Thin-Walled Struct. 2021, 166, 107952. [Google Scholar] [CrossRef]
- Jiang, Z.L.; Liu, J.L.; Yuan, C.K.; Chen, H.Y.; Li, X.Y. New progress in the field of extraordinary environmental mechanics-Review of the Chinese Journal of Theoretical and Applied Mechanics symposium on extreme mechanics. Chin. J. Theor. Appl. Mech. 2021, 53, 589–599. [Google Scholar] [CrossRef]
- Kuncham, E.; Sen, S.; Kumar, P.; Pathak, H. An Online Model-Based Fatigue Life Prediction Approach Using Extended Kalman Filter. Theor. Appl. Fract. Mech. 2022, 117, 103143. [Google Scholar] [CrossRef]
- Ince, A. Computational Crack Propagation Modeling of Welded Structures under As-welded and High Frequency Mechanical Impact (HFMI) Treatment Conditions. Fatigue Fract. Eng. Mat. Struct 2022, 45, 578–592. [Google Scholar] [CrossRef]
- Anderson, A.; Bair, J.; Bell, D.; Caruso, H.; Williamson, R. Department of Defense Test Method Standard for Environmental Engineering Considerations and Laboratory Tests. Ann. Emerg. Med. 2009, 54, S80. [Google Scholar]
- NASA-HDBK-7005; Dynamic Environmental Criteria. NASA: Washington, DC, USA, 2001.
- GB/T 23713.1-2009; Condition Monitoring and Diagnostics of Machines-Prognostics-Part 1: General Guidelines. Mechanical Vibration Shock and Condition Monitoring: Beijing, China, 2009.
- GB/T 34631-2017; Remanufacturing-RUL Assessment Guidelines of Mechanical Components. Green Manufacturing Technology of Equipment Manufacturing Industry: Beijing, China, 2017.
- Li, Y.X.; Huang, X.Z.; Ding, P.F.; Zhao, C.Y. Wiener-Based Remaining Useful Life Prediction of Rolling Bearings Using Improved Kalman Filtering and Adaptive Modification. Measurement 2021, 182, 109706. [Google Scholar] [CrossRef]
- Dong, Q.; Zheng, J.F.; Hu, C.H.; Li, B.; Mou, H.X. Remaining useful life prognostic method based on two-stage adaptive winner process. Acta Autom. Sin. 2022, 48, 539–553. [Google Scholar] [CrossRef]
- Belhaj Salem, M.; Fouladirad, M.; Deloux, E. Prognostic and Classification of Dynamic Degradation in a Mechanical System Using Variance Gamma Process. Mathematics 2021, 9, 254. [Google Scholar] [CrossRef]
- Al Masry, Z.; Mercier, S.; Verdier, G. Stochastic Comparisons and Ageing Properties of an Extended Gamma Process. J. Appl. Probab. 2021, 58, 140–163. [Google Scholar] [CrossRef]
- Duan, S.W.; Song, W.Q.; Zio, E.; Cattani, C.; Li, M. Product Technical Life Prediction Based on Multi-Modes and Fractional Lévy Stable Motion. Mech. Syst. Signal Process. 2021, 161, 107974. [Google Scholar] [CrossRef]
- Zhang, H.W.; Jia, C.; Chen, M.Y. Remaining Useful Life Prediction for Degradation Processes With Dependent and Nonstationary Increments. IEEE Trans. Instrum. Meas. 2021, 70, 1–12. [Google Scholar] [CrossRef]
- Nectoux, P.; Gouriveau, R.; Medjaher, K.; Ramasso, E.; Chebel-Morello, B.; Zerhouni, N.; Varnier, C. PRONOSTIA: An experimental platform for bearings accelerated degradation tests. In IEEE International Conference on Prognostics and Health Management; IEEE: Piscataway, NJ, USA, 2012. [Google Scholar]
- Qiu, H.; Lee, J.; Lin, J.; Yu, G. Wavelet Filter-Based Weak Signature Detection Method and Its Application on Rolling Element Bearing Prognostics. J. Sound Vib. 2006, 289, 1066–1090. [Google Scholar] [CrossRef]
- Wang, B.; Lei, Y.G.; Li, N.P.; Li, N.B. A Hybrid Prognostics Approach for Estimating Remaining Useful Life of Rolling Element Bearings. IEEE Trans. Reliab. 2020, 69, 401–412. [Google Scholar] [CrossRef]
- Lees, A.W.; Sinha, J.K.; Friswell, M.I. Model-Based Identification of Rotating Machines. Mech. Syst. Signal Process. 2009, 23, 1884–1893. [Google Scholar] [CrossRef]
- Zhang, G.; Liang, W.G.; She, B.; Tian, F.Q. Rotating Machinery Remaining Useful Life Prediction Scheme Using Deep-Learning-Based Health Indicator and a New RVM. Shock. Vib. 2021, 2021, 1–14. [Google Scholar] [CrossRef]
- Glowacz, A.; Tadeusiewicz, R.; Legutko, S.; Caesarendra, W.; Irfan, M.; Liu, H.; Brumercik, F.; Gutten, M.; Sulowicz, M.; Antonino Daviu, J.A.; et al. Fault Diagnosis of Angle Grinders and Electric Impact Drills Using Acoustic Signals. Appl. Acoust. 2021, 179, 108070. [Google Scholar] [CrossRef]
- Zhang, T.; Liu, S.L.; Wei, Y.; Zhang, H.L. A Novel Feature Adaptive Extraction Method Based on Deep Learning for Bearing Fault Diagnosis. Measurement 2021, 185, 110030. [Google Scholar] [CrossRef]
- Zhang, G. Research on Intelligent Methods for Health State Assessment and Remaining Useful Life Prediction of Mechanical Equipment; Naval University of Engineering: Wuhan, China, 2021. [Google Scholar]
- Guo, L.; Lei, Y.G.; Li, N.P.; Yan, T.; Li, N.B. Machinery Health Indicator Construction Based on Convolutional Neural Networks Considering Trend Burr. Neurocomputing 2018, 292, 142–150. [Google Scholar] [CrossRef]
- Zhu, Y.M.; Wu, J.C.; Wu, J.; Liu, S.Y. Dimensionality Reduce-Based for Remaining Useful Life Prediction of Machining Tools with Multi-sensor Fusion. Reliab. Eng. Syst. Saf. 2022, 218, 108179. [Google Scholar] [CrossRef]
- Tang, Y.S.; Wang, W.H.; Cui, H.G.; Liu, S.Y.; Chai, K. Application of deep convolution neural network in chaotic vibration identification. J. Vib. Shock. 2021, 40, 9–15. [Google Scholar] [CrossRef]
- Tian, K.W.; Dong, S.J.; Jiang, B.J.; Pei, X.W.; Tang, B.P.; Hu, X.L.; Zhao, X.X. A bearing fault diagnosis method based on an improved depth residual network. J. Vib. Shock. 2021, 40, 247–254. [Google Scholar] [CrossRef]
- Luo, J.H.; Zhang, X. Convolutional Neural Network Based on Attention Mechanism and Bi-LSTM for Bearing Remaining Life Prediction. Appl. Intell. 2022, 52, 1076–1091. [Google Scholar] [CrossRef]
- Kiranyaz, S.; Avci, O.; Abdeljaber, O.; Ince, T.; Gabbouj, M.; Inman, D.J. 1D Convolutional Neural Networks and Applications: A Survey. Mech. Syst. Signal Process. 2021, 151, 107398. [Google Scholar] [CrossRef]
- Zhao, R.; Yan, R.; Chen, Z.; Mao, K.; Wang, P.; Gao, R.X. Deep Learning and Its Applications to Machine Health Monitoring. Mech. Syst. Signal Process. 2019, 115, 213–237. [Google Scholar] [CrossRef]
- Drain, D.; Clement, C.B.; Serrato, G.; Sundaresan, N. DeepDebug: Fixing Python Bugs Using Stack Traces, Backtranslation, and Code Skeletons. 2021. Available online: https://www.researchgate.net/publication/351745031_DeepDebug_Fixing_Python_Bugs_Using_Stack_Traces_Backtranslation_and_Code_Skeletons (accessed on 17 August 2022).
- Pei, H.; Si, X.S.; Hu, C.H.; Zheng, J.F.; Li, T.M.; Zhang, J.X.; Pang, Z.N. An Adaptive Prognostics Method for Fusing CDBN and Diffusion Process: Application to Bearing Data. Neurocomputing 2021, 421, 303–315. [Google Scholar] [CrossRef]
- Zhang, B. Research on Data-Driven Performance Degradation Modelling and Remaining Useful Life Prediction for Mechanical Equipments; University of Science and Technology Beijing: Beijing, China, 2016. Available online: https://kns.cnki.net/KCMS/detail/detail.aspx?dbname=CDFDLAST2016&filename=1016100140.nh (accessed on 9 August 2023).
- Tang, C.S.; Sun, D.; Tang, W.; Cao, S.Y.; Li, J.Z.; Jing, J.P. A turbine rotor surface stress prediction model based on LSTM recurrent neural network. Proc. CSEE 2021, 41, 451–461. [Google Scholar] [CrossRef]
- Cheng, Y.W.; Hu, K.; Wu, J.; Zhu, H.P.; Shao, X.Y. Autoencoder Quasi-Recurrent Neural Networks for Remaining Useful Life Prediction of Engineering Systems. IEEE/ASME Trans. Mechatron. 2022, 27, 1081–1092. [Google Scholar] [CrossRef]
- Liu, J.W.; Song, Z.Y. Overview of recurrent neural networks. Control. Decis. 2022, 37, 2753–2768. [Google Scholar] [CrossRef]
- Xu, Y.; Cai, Y.Z.; Song, L. Review research on condition assessment of nuclear power plant equipment based on data-driven. J. Shanghai Jiao Tong Univ. 2022, 56, 267–278. [Google Scholar] [CrossRef]
- Zhang, M.; Feng, K.; Jiang, Z.N. A mechanical fault early warning methodology based on dynamic self-learning threshold and trend filtering techniques. J. Vib. Shock. 2014, 33, 8–14. [Google Scholar] [CrossRef]
- Hu, T.; Guo, Y.M.; Gu, L.D.; Zhou, Y.F.; Zhang, Z.S.; Zhou, Z.T. Remaining Useful Life Prediction of Bearings under Different Working Conditions Using a Deep Feature Disentanglement Based Transfer Learning Method. Reliab. Eng. Syst. Saf. 2022, 219, 108265. [Google Scholar] [CrossRef]
- Shen, F. Transfer Learning-Based Methodologies for Fault Diagnosis and Remaining Useful Life Prediction of Rotary Machine; Southeast University: Nanjing, China, 2020. [Google Scholar] [CrossRef]
- Lei, Y.G.; Xu, X.F.; Cai, X.; Li, N.P.; Kong, D.T.; Zhang, Y.M. Research on data quality assurance for health condition monitoring of machinery. J. Mech. Eng. 2021, 57, 1–9. [Google Scholar] [CrossRef]
- Chen, S.Q.; Peng, Z.K.; Zhou, P. Review of signal decomposition theory and its application in machine fault diagnosis. J. Mech. Eng. 2020, 56, 91–107. [Google Scholar] [CrossRef]
- Li, X.; Yan, Z.M.; Liu, Z.L. Combination and application of machine learning and computational mechanics. Chin. Sci. Bull. 2019, 64, 635–648. [Google Scholar] [CrossRef]
- Wang, X.Z.; Zhang, X. Decoupling and partial iterative calculation method of flexibility and sloshing dynamics. Aerosp. Control 2021, 39, 9–13+33. [Google Scholar] [CrossRef]
- Wang, Q.H.; Guo, W.G.; Xu, F.; Gao, M.; Wang, Z.H. Synchronous and decoupling calibration of tri-axial impact force transducers based on a Hopkinson bar and an artificial neural network. Explos. Shock. Waves 2022, 42, 87–98. [Google Scholar] [CrossRef]
- Li, J.J.; Ren, Z.S.; Wu, Y.M.; Wang, Y.W. Decoupling and dimension reduction calibration method for bogie frame loads of high-speed train and test verification. J. Cent. South Univ. Sci. Technol. 2022, 53, 1730–1739. [Google Scholar] [CrossRef]
- Zhang, Y.T.; Li, F.R.; Tian, H.Q.; Hu, J.B.; Wei, C.; Wu, W. Research on decoupling control of integrated dynamics system of unmanned vehicle chassis. Automot. Eng. 2021, 43, 1673–1682+1709. [Google Scholar] [CrossRef]
- Liu, W.K.; George, K.; Tang, S.Q.; Julien, Y. A computational mechanics special issue on: Data-driven modeling and simulation—theory, methods, and applications. Comput. Mech. 2019, 64, 275–277. [Google Scholar] [CrossRef]
- Dong, Q.R.; Wang, W.G.; Chen, F.; Chen, T.; Zhang, Z.D.; Liu, T.X. Research on single detector decoupling control technology based on adaptive Kalman algorithm. Infrared Laser Eng. 2022, 51, 345–352. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?FileName=HWYJ202206032&DbName=DKFX2022 (accessed on 17 August 2022).
- Cui, L.L.; Wang, X.; Wang, H.Q.; Ma, J.F. Research on Remaining Useful Life Prediction of Rolling Element Bearings Based on Time-Varying Kalman Filter. IEEE Trans. Instrum. Meas. 2020, 69, 2858–2867. [Google Scholar] [CrossRef]
- Li, N.P.; Lei, Y.G.; Gebraeel, N.; Wang, Z.J.; Cai, X.; Xu, P.C.; Wang, B. Multi-Sensor Data-Driven Remaining Useful Life Prediction of Semi-Observable Systems. IEEE Trans. Ind. Electron. 2021, 68, 11482–11491. [Google Scholar] [CrossRef]
- Bender, A. A Multi-Model-Particle Filtering-Based Prognostic Approach to Consider Uncertainties in RUL Predictions. Machines 2021, 9, 210. [Google Scholar] [CrossRef]
- Wen, B.C.; Xiao, M.Q.; Wang, G.H.; Yang, Z.; Li, J.F.; Chen, X. A Fusion Prognostic Method for Remaining Useful Life Prediction Based on an Extended Belief Rule Base and Particle Filters. IEEE Access 2021, 9, 73377–73391. [Google Scholar] [CrossRef]
- Wang, B.; Lei, Y.G.; Yan, T.; Li, N.P.; Guo, L. Recurrent Convolutional Neural Network: A New Framework for Remaining Useful Life Prediction of Machinery. Neurocomputing 2020, 379, 117–129. [Google Scholar] [CrossRef]
- Li, T.M.; Si, X.S.; Liu, X.; Pei, H. Data-Model interactive remaining useful life prediction technologies for stochastic degrading devices with big data. Acta Autom. Sin. 2022, 48, 2119–2141. [Google Scholar] [CrossRef]
- Li, T.M.; Si, X.S.; Zhang, J.X. Data-model interactive remaining useful life prediction method for multi-sensor monitored linear stochastic degrading devices. Acta Aeronaut. Astronaut. Sin. 2022, 44, 94–112. [Google Scholar]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, W.; Li, C.; Zhao, L.; Yan, X.; Sun, S. Summarization of Remaining Life Prediction Methods for Special Power Plants. Appl. Sci. 2023, 13, 9365. https://doi.org/10.3390/app13169365
Liang W, Li C, Zhao L, Yan X, Sun S. Summarization of Remaining Life Prediction Methods for Special Power Plants. Applied Sciences. 2023; 13(16):9365. https://doi.org/10.3390/app13169365
Chicago/Turabian StyleLiang, Weige, Chi Li, Lei Zhao, Xiaojia Yan, and Shiyan Sun. 2023. "Summarization of Remaining Life Prediction Methods for Special Power Plants" Applied Sciences 13, no. 16: 9365. https://doi.org/10.3390/app13169365