
A Nonlinear Convex Decreasing Weights Golden Eagle Optimizer Technique Based on a Global Optimization Strategy

Abstract
:1. Introduction
- (i)
- The Arnold chaotic map strategy is employed to help the golden eagle population obtain a better initial position.
- (ii)
- The nonlinear convex reduction strategy is used to coordinate the cruising and attacking behavior of the golden eagle, thereby improving its local and global search capabilities.
- (iii)
- The global optimization strategy is utilized to assist the golden eagle population in complex environmental optimization, enhancing the possibility of escaping from local optima.
- (iv)
- Twelve benchmark test functions and the CEC2021 test set are employed to assess the capabilities of the improved algorithm, including comparisons with eight other algorithms.
- (v)
- Various statistical tests, including the Wilcoxon rank-sum test and Friedman ranking, as well as Holm’s subsequent verification, are conducted to determine the overall ranking of the comparison algorithms and the improved algorithm on the twelve benchmark test functions and CEC2021, thereby validating the final performance of the algorithm.
- (vi)
- The individual effects of the nonlinear convex reduction strategy and the last global optimization strategy are tested separately.
- (vii)
- Algorithm complexity analysis is performed.
- (viii)
- The improved algorithm is applied to the classical problem of cognitive radio spectrum allocation and the results compared with those of commonly used algorithms.
- (ix)
- Five common engineering applications are utilized to test the search capabilities of the algorithm.
2. Related Works
2.1. Basic Work on GEO
2.1.1. Prey Selection
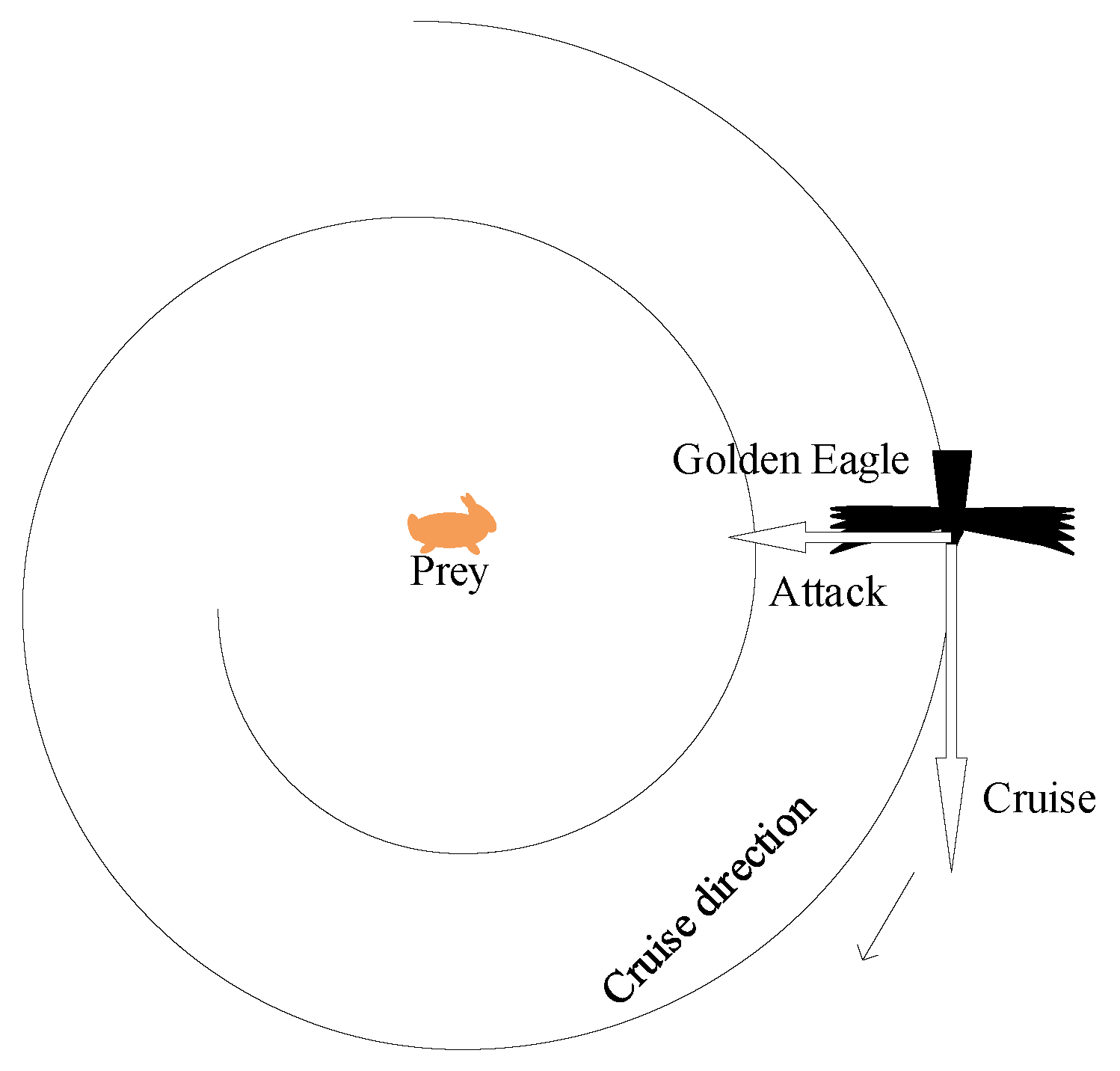
2.1.2. Attack and Cruise
2.1.3. Move to New Location
2.2. Related Works on GEO
2.3. Cognitive Radio Model
3. Improved Golden Eagle Optimizer
3.1. Algorithm Model
3.1.1. Population Initialization Using the Arnold Chaotic Map
3.1.2. Nonlinear Convex Decreasing Weight
3.1.3. Global Optimization Strategy
3.2. Detailed Steps for the Improved Golden Eagle Optimizer Algorithm
| Algorithm 1 Pseudo-Code of IGEO |
| Setup 1 Set the population size N, current iterations t = 0 and maximum generations T = 1000 |
| 2 Initialize the population position by Arnold chaotic map |
| 3 Evaluate fitness function |
| 4 Initialize other parameters: Pc and Pa and golden eagle’s memory |
| 5 While t < T |
| 6 Update Pc and Pa based on Equation (9) |
| 7 For i = 1:N |
| 8 Calculate A based on Equation (1) |
| 9 If the length of A is not equal to zero |
| 10 Calculate C based on Equations (5) and (6) |
| 11 Calculate ω(t) based on Equation (13) |
| 12 Calculate based on Equation (7) |
| 13 Calculate the population fitness and selected fitness optimal individual xbest |
| 14 Update new position xt+1 based on Equation (15) and calculate its fitness |
| 15 If fitness(xt+1) is better than fitness of position in golden eagle’s memory |
| 16 Replace the new position with position in golden eagle’s memory |
| 17 End If |
| 18 End If |
| 19 End For |
| 20 End While |
3.3. Algorithm Complexity Analysis
4. Analysis of Experimental Results
4.1. Simulation Experiment
4.1.1. Experimental Settings and Test Functions
4.1.2. Comparative Analysis of Performance with Other Algorithms
4.1.3. Statistical Significance Testing
- (i)
- Wilcoxon test for statistics. If IGEO obtains the best results, it is then evaluated against the eight comparison algorithms using the rank-sum test, which is carried out at the 5% significance level. The best results from 50 separate tests make up the data vectors for comparison.
- (ii)
- Friedman Test. A differential analysis technique called the Friedman test can be used to solve issues by combining various approaches. The advantages and disadvantages of the algorithms are compared by computing the average ratings of the algorithms being compared. With this approach, in contrast to the rank-sum test approach, the comparison algorithm’s overall performance can be further assessed. The formula for the Friedman test is as follows:
- (iii)
- Holm verification. Table 11 and Table 12 present the data acquired after further Holm verification of the results by comparing the results obtained with the original and improved algorithms. Assuming that each algorithm’s distribution is equal to that of the classical original algorithm, the system uses Friedman to perform a bidirectional rank variance analysis on the pertinent samples at a significance level of 0.05.
4.1.4. Comparative Analysis of Different Strategy Algorithms
4.2. Cognitive Radio Application
4.2.1. IGEO Problem Solving Model
| Algorithm 2 Pseudo-Code of IGEO for Solving CR |
| 1 Initialize the idle matrix L, the benefit matrix B, the non-interference distribution matrix C |
| 2 Calculate the number of values in L, and then enter the appropriate values of n and m at the position of 1 in the idle matrix L. Find the dimensions D of the optimization problem, which corresponds to the number of unique golden eagle codes, by listing the position elements in an increasing order of n and m |
| 3 Set algorithm parameters N, t = 0, T = 1000 |
| 4 Initialize Arnold chaotic map |
| 5 According to the problem dimension D, the number N, and Arnold map, the individual position is initialized, and the golden eagles’ position is mapped to the allocation matrix A. |
| 6 If all n and k in the coherence matrix satisfy the condition , the values of and in the assignment matrix A are both 1. |
| 7 Set one of them to 0 and keep the other unchanged |
| 8 End If |
| 9 The binary coding corresponding to the golden eagle individual after processing the non-interference constraint matrix |
| 10 According to the distribution matrix A and the benefit matrix B, the individual fitness value is calculated. |
| 11 Initialize other parameters: , and golden eagle’s memory |
| 12 While t < T |
| 13 Update and based on Equation (9) |
| 14 For i = 1:N |
| 15 Calculate A(attack vector) based on Equation (1) |
| 16 If the length of A is not equal to zero |
| 17 Calculate C based on Equations (5) and (6) |
| 18 Calculate ω(t) based on Equation (12) |
| 19 Calculate based on Equation (7) |
| 20 Calculate the population fitness and selected fitness optimal individual xbest |
| 21 Update new position xt+1 based on Equation (14) and calculate its fitness |
| 22 Discretize the current position of the golden eagle individual based on Equation (7) binary |
| 15 If fitness(xt+1) is better than fitness of position in golden eagle’s memory |
| 16 Replace the new position with position in golden eagle’s memory |
| 17 End If |
| 18 End If |
| 19 End For |
| 20 End While |
4.2.2. The Solution Results of the Problem Model
4.3. Engineering Applications
4.3.1. Piston Rod Design Problem
4.3.2. I Beam Design Problem
4.3.3. Car Side Impact Design Problem
4.3.4. Cantilever Beam Design Problem
4.3.5. Three-Bar Truss Design Problem
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A




Appendix B
Appendix B.1. Piston Rod Design Problem
Appendix B.2. I Beam Design Problem
Appendix B.3. Cantilever Beam Design Problem
Appendix B.4. Car Side Impact Design Problem
Appendix B.5. Three Bar Truss Design Problem
References
- Zervoudakis, K.; Tsafarakis, S. A mayfly optimization algorithm. Comput. Ind. Eng. 2020, 145, 106559. [Google Scholar] [CrossRef]
- Nematollahi, F.A.; Rahiminejad, A.; Vahidi, B. A novel physical based meta-heuristic optimization method known as Lightning Attachment Procedure Optimization. Appl. Soft Comput. 2017, 59, 596–621. [Google Scholar] [CrossRef]
- Haider, W.B.; Ur, N.R.; Asma, N.; Nisar, K.; Ibrahim, A.; Shakir, R.; Rawat, D.B. Constructing Domain Ontology for Alzheimer Disease Using Deep Learning Based Approach. Electronics 2022, 11, 1890. [Google Scholar]
- Ji, Z.; Chang, J.; Guo, X.; Wang, J.; Yang, H.; Wang, L.; Jiang, H. Ultrawide coverage receiver based on compound eye structure for free space optical communication. Opt. Commun. 2023, 545, 129740. [Google Scholar] [CrossRef]
- Zhu, C.; Ji, Q.; Guo, X.; Zhang, J. Mmwave massive MIMO: One joint beam selection combining cuckoo search and ant colony optimization. EURASIP J. Wirel. Commun. Netw. 2023, 2023, 65. [Google Scholar] [CrossRef]
- Yang, X.-S.; Deb, S. Engineering optimisation by cuckoo search. Int. J. Math. Model. Numer. Optim. 2010, 1, 330–343. [Google Scholar] [CrossRef]
- Majid, M.; Goel, L.; Saxena, A.; Srivastava, A.K.; Singh, G.K.; Verma, R.; Bhutto, J.K.; Hussein, H.S. Firefly Algorithm and Neural Network Employment for Dilution Analysis of Super Duplex Stainless Steel Clads over AISI 1020 Steel Using Gas Tungsten Arc Process. Coatings 2023, 13, 841. [Google Scholar] [CrossRef]
- Dervis, K.; Bahriye, B. A powerful and efficient algorithm for numerical function optimization: Artificial bee colony (ABC) algorithm. J. Glob. Optim. 2007, 39, 459–471. [Google Scholar]
- Seyedali, M.; Andrew, L. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Gaurav, D.; Vijay, K. Seagull optimization algorithm: Theory and its applications for large-scale industrial engineering problems. Knowl. Based Syst. 2018, 165, 169–196. [Google Scholar]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp Swarm Algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Arora, S.; Singh, S. Butterfly optimization algorithm: A novel approach for global optimization. Soft Comput. 2019, 23, 715–734. [Google Scholar] [CrossRef]
- Hassan, N.; Bangyal, W.H.; Khan, S.M.A.; Nisar, K.; Ibrahim, A.A.A.; Rawat, D.B. Improved Opposition-Based Particle Swarm Optimization Algorithm for Global Optimization. Symmetry 2021, 13, 2280. [Google Scholar] [CrossRef]
- Yang, L.; He, Q.; Yang, L.; Luo, S. A Fusion Multi-Strategy Marine Predator Algorithm for Mobile Robot Path Planning. Appl. Sci. 2022, 12, 9170. [Google Scholar] [CrossRef]
- Li, S.; He, Q. Improved Feature Selection for Marine Predator Algorithm. Comput. Eng. Appl. 2023, 59, 168–179. [Google Scholar]
- Xu, M.; Long, W.; Yang, Y. Planar-mirror reflection imaging learning based marine predators algorithm and feature selection. Comput. Appl. Res. 2023, 40, 394–398 + 444. [Google Scholar]
- Ma, C.; Zeng, G.; Huang, B.; Liu, J. Marine Predator Algorithm Based on Chaotic Opposition Learning and Group Learning. Comput. Eng. Appl. 2022, 58, 271–283. [Google Scholar]
- Xu, H.; Zhang, D.; Wang, Y.; Song, T.T. Application of Improved Whale Algorithm in Cognitive Radio Spectrum Allocation. Comput. Simul. 2021, 38, 431–436. [Google Scholar]
- Xu, H.; Zhang, D.; Wang, Y.; Song, T.T. Spectrum allocation based on improved binary grey wolf optimizer. Comput. Eng. Des. 2021, 42, 1353–1359. [Google Scholar]
- Yin, D.; Zhang, D.; Zhang, L.; Cai, P.; Qin, W. Spectrum Allocation Strategy Based on Sparrow Algorithm in Cognitive Industrial Internet of Things. Data Acquis. Process. 2022, 37, 371–382. [Google Scholar]
- Zhang, D.; Wang, Y.; Zou, C.; Zhao, P.; Zhang, L. Resource allocation strategies for improved mayfly algorithm in cognitive heterogeneous cellular network. J. Commun. 2022, 43, 156–167. [Google Scholar]
- Meng, K.O.; Pauline, O.; Kiong, C.S. A new flower pollination algorithm with improved convergence and its application to engineering optimization. Decis. Anal. J. 2022, 5, 100144. [Google Scholar]
- Yang, X.; Wang, R.; Zhao, D.; Yu, F.; Huang, C.; Heidari, A.A.; Chen, H. An adaptive quadratic interpolation and rounding mechanism sine cosine algorithm with application to constrained engineering optimization problems. Expert Syst. Appl. 2023, 213, 119041. [Google Scholar] [CrossRef]
- Sabry, A.E.; Muhammed, M.H.; Khalaf, W.A. Letter: Application of optimization algorithms to engineering design problems and discrepancies in mathematical formulas. Appl. Soft Comput. J. 2023, 140, 110252. [Google Scholar]
- Mohammadi-Balani, A.; Nayeri, M.D.; Azar, A.; Taghizadeh-Yazdi, M. Golden eagle optimizer: A nature-inspired metaheuristic algorithm. Comput. Ind. Eng. 2021, 152, 107050. [Google Scholar] [CrossRef]
- Aijaz, M.; Hussain, I.; Lone, S.A. Golden Eagle Optimized Control for a Dual Stage Photovoltaic Residential System with Electric Vehicle Charging Capability. Energy Sources Part A Recovery Util. Environ. Eff. 2022, 44, 4525–4545. [Google Scholar] [CrossRef]
- Magesh, T.; Devi, G.; Lakshmanan, T. Improving the performance of grid connected wind generator with a PI control scheme based on the metaheuristic golden eagle optimization algorithm. Electr. Power Syst. Res. 2023, 214, 108944. [Google Scholar] [CrossRef]
- Kumar, A.G.D.; Vengadachalam, N.; Madhavi, S.V. A Novel Optimized Golden Eagle Based Self-Evolving Intelligent Fuzzy Controller to Enhance Power System Performance. In Proceedings of the 2022 IEEE 2nd International Conference on Sustainable Energy and Future Electric Transportation (SeFeT), Hyderabad, India, 4–6 August 2022; pp. 1–6. [Google Scholar]
- Sun, H. An extreme learning machine model optimized based on improved golden eagle algorithm for wind power forecasting. In Proceedings of the 2022 37th Youth Academic Annual Conference of Chinese Association of Automation (YAC), Beijing, China, 19–20 November 2022; pp. 86–91. [Google Scholar]
- Boriratrit, S.; Chatthaworn, R. Golden Eagle Extreme Learning Machine for Hourly Solar Irradiance Forecasting. In Proceedings of the International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), Maldives, Maldives, 16–18 November 2022; p. 9988106. [Google Scholar]
- Bandahalli Mallappa, P.K.; Velasco Quesada, G.; Martínez García, H. Energy Management of Grid Connected Hybrid Solar/Wind/Battery System using Golden Eagle Optimization with Incremental Conductance. Renew. Energy Power Qual. J. 2022, 20, 342–347. [Google Scholar] [CrossRef]
- Zhang, Z.-K.; Li, P.-Q.; Zeng, J.-J. Capacity Optimization of Hybrid Energy Storage System Based on Improved Golden Eagle Optimization. J. Netw. Intell. 2022, 7, 943–959. [Google Scholar]
- Boriratrit, S.; Fuangfoo, P.; Srithapon, C.; Chatthaworn, R. Adaptive meta-learning extreme learning machine with golden eagle optimization and logistic map for forecasting the incomplete data of solar irradiance. Energy AI 2023, 13, 100243. [Google Scholar] [CrossRef]
- Guo, J.-F.; Zhang, Y.-Q.; Xu, S.-B.; Lin, J.-Y. A Power System Profitable Load Dispatch Based on Golden Eagle Optimizer. J. Comput. 2022, 33, 145–158. [Google Scholar]
- Al-Gburi, Z.D.S.; Kurnaz, S. Optical disk segmentation in human retina images with golden eagle optimizer. Optik 2022, 271, 170103. [Google Scholar] [CrossRef]
- Dwivedi, A.; Rai, V.; Amrita; Joshi, S.; Kumar, R.; Pippal, S.K. Peripheral blood cell classification using modified local-information weighted fuzzy C-means clustering-based golden eagle optimization model. Soft Comput. 2022, 26, 13829–13841. [Google Scholar] [CrossRef]
- Justus, J.J.; Anuradha, M. A golden eagle optimized hybrid multilayer perceptron convolutional neural network architecture-based three-stage mechanism for multiuser cognitive radio network. Int. J. Commun. Syst. 2021, 35, 5054. [Google Scholar] [CrossRef]
- Eluri, R.K.; Devarakonda, N. Binary Golden Eagle Optimizer with Time-Varying Flight Length for feature selection. Knowl.-Based Syst. 2022, 247, 108771. [Google Scholar] [CrossRef]
- Zarkandi, S. Dynamic modeling and power optimization of a 4RPSP+PS parallel flight simulator machine. Robotica 2021, 40, 646–671. [Google Scholar] [CrossRef]
- Lv, J.X.; Yan, L.J.; Chu, S.C.; Cai, Z.M.; Pan, J.S.; He, X.K. A new hybrid algorithm based on golden eagle optimizer and grey wolf optimizer for 3D path planning of multiple UAVs in power inspection. Neural Comput. Appl. 2022, 34, 11911–11936. [Google Scholar] [CrossRef]
- Pan, J.-S.; Lv, J.-X.; Yan, L.-J.; Weng, S.-W.; Chu, S.-C.; Xue, J.-K. Golden eagle optimizer with double learning strategies for 3D path planning of UAV in power inspection. Math. Comput. Simul. 2022, 193, 509–532. [Google Scholar] [CrossRef]
- Ilango, R.; Rajesh, P.; Shajin Francis, H. S2NA-GEO method–based charging strategy of electric vehicles to mitigate the volatility of renewable energy sources. Int. Trans. Electr. Energy Syst. 2021, 31, 13125. [Google Scholar] [CrossRef]
- Jagadish Kumar, N.; Balasubramanian, C. Hybrid Gradient Descent Golden Eagle Optimization (HGDGEO) Algorithm-Based Efficient Heterogeneous Resource Scheduling for Big Data Processing on Clouds. Wirel. Pers. Commun. 2023, 129, 1175–1195. [Google Scholar] [CrossRef]
- Ghasemi, A.; Sousa, E.S. Spectrum sensing in cognitive radio networks: Requirements, challenges and design trade-offs. IEEE Commun. Mag. 2008, 46, 32–39. [Google Scholar] [CrossRef]
- Peng, C.; Zheng, H.; Zhao, B.Y. Utilization and fairness in spectrum assignment for opportunism tic spectrum access. Mob. Netw. Appl. 2006, 11, 555–576. [Google Scholar] [CrossRef]
- Wang, W.; Liu, X. List-coloring based channel allocation for open spectrum wireless networks. In Proceedings of the IEEE Vehicular Technology Conference, Stockholm, Sweden, 30 May–1 June 2005; pp. 690–694. [Google Scholar]
- Gandhi, S.; Buragohain, C.; Cao, L.; Zheng, H.; Suri, S. Towards real time dynamic spectrum auctions. Comput. Netw. 2009, 52, 879–897. [Google Scholar] [CrossRef]
- Ji, Z.; Liu, K.J.R. Dynamic spectrum sharing: A game theoretical overview. IEEE Commun. Mag. 2007, 45, 88–94. [Google Scholar] [CrossRef]
- Liu, Q.; Wang, C.; Li, X.; Gao, L. An improved genetic algorithm with modified critical path-based searching for integrated process planning and scheduling problem considering automated guided vehicle transportation task. J. Manuf. Syst. 2023, 70, 127–136. [Google Scholar] [CrossRef]
- Ahmed, A.M.; Rashid, T.A.; Saeed, S.A.M. Cat Swarm Optimization Algorithm: A Survey and Performance Evaluation. Comput. Intell. Neurosci. 2020, 2020, 4854895. [Google Scholar] [CrossRef]
- Mirjalili, S. SCA: A Sine Cosine Algorithm for solving optimization problems. Knowl.-Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Nabil, E. A Modified Flower Pollination Algorithm for Global Optimization. Expert Syst. Appl. 2016, 57, 192–203. [Google Scholar] [CrossRef]
- Dong, H.B.; Li, D.J.; Zhang, X.P. Particle Swarm Optimization Algorithm with Dynamically Adjusting Inertia Weight. Comput. Sci. 2018, 45, 98–102, 139. [Google Scholar]
- Caraffini, F.; Iacca, G.; Neri, F.; Picinali, L.; Mininno, E. A CMA-ES Super-fit Scheme for the Re-sampled Inheritance Search. In Proceedings of the 2013 IEEE Congress on Evolutionary Computation, Cancun, Mexico, 20–23 June 2013; pp. 1123–1130. [Google Scholar]
- Tanabe, R.; Fukunaga, A.S. Improving the Search Performance of SHADE Using Linear Population Size Reduction. In Proceedings of the 2014 IEEE Congress on Evolutionary Computation (CEC), Beijing, China, 6–11 July 2014; pp. 1658–1665. [Google Scholar]
- Kumar, S.A. Multi-population-based adaptive sine cosine algorithm with modified mutualism strategy for global optimization. Knowl. Based Syst. 2022, 251, 109326. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| m | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| F1 | 2 | 4 | 7 | 6 | 5 | 3 | 1 |
| F2 | 2 | 3 | 4 | 7 | 6 | 5 | 1 |
| F3 | 2 | 4 | 3 | 5 | 6 | 7 | 1 |
| F4 | 2 | 6 | 7 | 5 | 4 | 3 | 1 |
| F6 | 2 | 4 | 5 | 7 | 6 | 3 | 1 |
| F7 | 2 | 3 | 5 | 7 | 6 | 4 | 1 |
| Total | 12 | 24 | 31 | 37 | 33 | 25 | 26 |
| Fun No. | Name | Equation | Features | D | Bounds | f* |
|---|---|---|---|---|---|---|
| F1 | Sphere | Unimodal | 30 | [−100, 100]D | 0 | |
| F2 | Schwefel 2.22 | Unimodal | 30 | [−10, 10]D | 0 | |
| F3 | Griewank | Multimodal | 30 | [−600, 600]D | 0 | |
| F4 | Ackley1 | Multimodal | 30 | [−32, 32]D | 0 | |
| F5 | Periodic | Multimodal | 30 | [−50, 50]D | 0.9 | |
| F6 | Rastrigin | Multimodal | 30 | [−5.12, 5.12]D | 0 | |
| F7 | Salomon | Multimodal | 30 | [−100, 100]D | 0 | |
| F8 | Yang 4 | Multimodal | 30 | [−10, 10]D | −1 | |
| F9 | Matyas | Fixed low-dim | 2 | [−10, 10]D | 0 | |
| F10 | Three-hump camel | Fixed low-dim | 2 | [−5, 5]D | 0 | |
| F11 | Himmeblau | Fixed low-dim | 2 | [−5, 5]D | 0 | |
| F12 | Levi 13 | Fixed low-dim | 2 | [−10, 10]D | 0 | |
| f* represents the theoretical optimal value of each test function. | ||||||
| D represents the dimension of the test function. | ||||||
| Algorithms | Parameter Settings |
|---|---|
| BOA | p = 0.8, c = 0.01, a = 0.1 |
| GWO | = 2, = 0 |
| PSO | = 0.9, = 0.2, c1 = c2 = 2 |
| SCA | a = 2 |
| SSA | - |
| WOA | b = 1 |
| GEO | = [ ] = [1 0.5], = [ ] = [0.5 2] |
| GEO_DLS | = [ ] = [1 0.5], = [ ] = [0.5 2], ε = 3, μ∈[0,1], Q∈[0,1] |
| IGEO | = 0.9, = 0.4, = [ ] = [1 0.5], = [ ] = [0.5 2] |
| Fun No. | Algorithm | Mean | Std | Time/s | Fun No. | Algorithm | Mean | Std | Time/s |
|---|---|---|---|---|---|---|---|---|---|
| F1 | BOA | 1.66 × 10−14 | 8.70 × 10−16 | 0.3235 | F2 | BOA | 9.17 × 10−12 | 1.11 × 10−12 | 0.2990 |
| GWO | 2.92 × 10−70 | 1.03 × 10−69 | 0.4156 | GWO | 1.77 × 10−80 | 5.91 × 10−80 | 0.2193 | ||
| PSO | 7.77 × 10−12 | 1.44 × 10−11 | 0.1773 | PSO | 3.89 × 10−27 | 1.01 × 10−26 | 0.1158 | ||
| SCA | 3.48 × 10−3 | 1.26 × 10−2 | 0.3297 | SCA | 3.39 × 10−21 | 1.02 × 10−20 | 0.1774 | ||
| SSA | 8.70 × 10−9 | 1.59 × 10−9 | 0.3864 | SSA | 6.89 × 10−6 | 1.52 × 10−6 | 0.3061 | ||
| WOA | 5.37 × 10−172 | 0 | 0.1798 | WOA | 5.08 × 10−112 | 3.36 × 10−111 | 0.1298 | ||
| GEO | 5.05 × 10−12 | 4.35 × 10−12 | 0.8909 | GEO | 2.58 × 10−5 | 9.24 × 10−5 | 0.7959 | ||
| GEO_DLS | 1.15 × 10−17 | 8.00 × 10−17 | 0.8448 | GEO_DLS | 4.66 × 10−12 | 1.28 × 10−11 | 0.7581 | ||
| IGEO | 0 | 0 | 0.7498 | IGEO | 0 | 0 | 0.6049 | ||
| F3 | BOA | 2.80 × 10−16 | 1.98 × 10−15 | 0.3983 | F4 | BOA | 5.50 × 10−13 | 4.35 × 10−13 | 0.3228 |
| GWO | 1.60 × 10−2 | 2.11 × 10−2 | 0.2654 | GWO | 4.58 × 10−15 | 7.03 × 10−16 | 0.2250 | ||
| PSO | 1.28 × 10−1 | 8.38 × 10−2 | 0.1658 | PSO | 4.87 × 10−15 | 1.17 × 10−15 | 0.1165 | ||
| SCA | 1.52 × 10−2 | 6.12 × 10−2 | 0.2395 | SCA | 4.73 × 10−15 | 1.73 × 10−15 | 0.1896 | ||
| SSA | 2.43 × 10−1 | 1.31 × 10−1 | 0.3889 | SSA | 4.55 × 10−1 | 8.01 × 10−1 | 0.3061 | ||
| WOA | 4.31 × 10−2 | 8.59 × 10−2 | 0.1794 | WOA | 4.01 × 10−15 | 1.98 × 10−15 | 0.1323 | ||
| GEO | 4.93 × 10−3 | 5.67 × 10−3 | 0.8387 | GEO | 4.44 × 10−15 | 0 | 0.8499 | ||
| GEO_DLS | 0 | 0 | 0.8421 | GEO_DLS | 1.32 × 10−11 | 7.77 × 10−11 | 0.7699 | ||
| IGEO | 0 | 0 | 0.8812 | IGEO | 8.88 × 10−16 | 0 | 0.8077 | ||
| F5 | BOA | 8.38 × 100 | 4.70 × 10−1 | 0.4023 | F6 | BOA | 2.23 × 101 | 1.90 × 101 | 0.3149 |
| GWO | 5.98 × 100 | 1.70 × 100 | 0.5043 | GWO | 2.65 × 10−1 | 1.33 × 100 | 0.2052 | ||
| PSO | 1.00 × 100 | 9.74 × 10−10 | 0.2299 | PSO | 2.75 × 100 | 1.55 × 100 | 0.1120 | ||
| SCA | 3.94 × 100 | 3.88 × 10−1 | 0.4031 | SCA | 5.86 × 10−1 | 3.14 × 100 | 0.1917 | ||
| SSA | 2.39 × 100 | 2.68 × 10−1 | 0.4361 | SSA | 1.41 × 101 | 6.96 × 100 | 0.3525 | ||
| WOA | 9.46 × 10−1 | 6.79 × 10−2 | 0.1927 | WOA | 0 | 0 | 0.1428 | ||
| GEO | 2.60 × 100 | 4.06 × 10−1 | 0.9985 | GEO | 2.79 × 100 | 1.63 × 100 | 0.8278 | ||
| GEO_DLS | 2.01 × 100 | 2.86 × 10−1 | 0.9769 | GEO_DLS | 4.26 × 10−16 | 3.01 × 10−15 | 0.7984 | ||
| IGEO | 9.00 × 10−1 | 2.24 × 10−16 | 0.9742 | IGEO | 0 | 0 | 0.8386 | ||
| F7 | BOA | 3.03 × 10−1 | 6.85 × 10−3 | 0.3426 | F8 | BOA | 4.56 × 10−12 | 1.05 × 10−12 | 0.5778 |
| GWO | 1.44 × 10−1 | 5.01 × 10−2 | 0.4574 | GWO | 1.40 × 10−16 | 3.28 × 10−17 | 0.4964 | ||
| PSO | 3.68 × 10−1 | 5.87 × 10−2 | 0.2078 | PSO | 1.49 × 10−22 | 9.74 × 10−22 | 0.2717 | ||
| SCA | 2.47 × 10−1 | 1.41 × 10−1 | 0.3542 | SCA | 1.57 × 10−10 | 8.96 × 10−11 | 0.4437 | ||
| SSA | 7.68 × 10−1 | 1.32 × 10−1 | 0.3978 | SSA | 3.11 × 10−23 | 1.43 × 10−23 | 0.5102 | ||
| WOA | 1.14 × 10−1 | 6.70 × 10−2 | 0.1881 | WOA | −1.80 × 10−1 | 3.88 × 10−1 | 0.2832 | ||
| GEO | 4.14 × 10−1 | 5.35 × 10−2 | 0.8920 | GEO | 6.93 × 10−21 | 1.61 × 10−20 | 0.9595 | ||
| GEO_DLS | 6.24 × 10−2 | 4.84 × 10−2 | 0.9006 | GEO_DLS | −2.38 × 10−1 | 4.28 × 10−1 | 0.9696 | ||
| IGEO | 0 | 0 | 0.7675 | IGEO | −1.00 × 100 | 0 | 0.9908 | ||
| F9 | BOA | 1.13 × 10−15 | 4.81 × 10−16 | 0.2707 | F10 | BOA | 5.43 × 10−18 | 5.67 × 10−18 | 0.2804 |
| GWO | 1.38 × 10−271 | 0 | 0.1262 | GWO | 0 | 0 | 0.1281 | ||
| PSO | 9.27 × 10−92 | 6.19 × 10−91 | 0.0724 | PSO | 2.30 × 10−125 | 1.39 × 10−124 | 0.0783 | ||
| SCA | 1.81 × 10−122 | 1.28 × 10−121 | 0.1161 | SCA | 1.12 × 10−149 | 7.25 × 10−149 | 0.1306 | ||
| SSA | 2.90 × 10−16 | 3.90 × 10−16 | 0.2668 | SSA | 7.90 × 10−16 | 8.78 × 10−16 | 0.2439 | ||
| WOA | 0 | 0 | 0.1143 | WOA | 4.00 × 10−184 | 0 | 0.1150 | ||
| GEO | 3.37 × 10−93 | 1.37 × 10−92 | 0.8084 | GEO | 5.40 × 10−125 | 2.01 × 10−124 | 0.7735 | ||
| GEO_DLS | 5.22 × 10−48 | 2.99 × 10−47 | 0.7655 | GEO_DLS | 4.11 × 10−60 | 2.38 × 10−59 | 0.7380 | ||
| IGEO | 0 | 0 | 0.7445 | IGEO | 0 | 0 | 0.5507 | ||
| F11 | BOA | 2.38 × 10−3 | 2.80 × 10−3 | 0.4347 | F12 | BOA | 2.11 × 10−4 | 2.41 × 10−4 | 0.3884 |
| GWO | 2.18 × 10−6 | 3.05 × 10−6 | 0.1891 | GWO | 9.94 × 10−8 | 1.12 × 10−7 | 0.1877 | ||
| PSO | 2.52 × 10−31 | 3.72 × 10−31 | 0.0952 | PSO | 1.35 × 10−31 | 2.21 × 10−47 | 0.1359 | ||
| SCA | 5.38 × 10−3 | 6.27 × 10−3 | 0.1640 | SCA | 3.40 × 10−4 | 3.28 × 10−4 | 0.1755 | ||
| SSA | 2.87 × 10−14 | 4.69 × 10−14 | 0.4635 | SSA | 4.12 × 10−14 | 5.21 × 10−14 | 0.3833 | ||
| WOA | 2.85 × 10−7 | 7.96 × 10−7 | 0.1760 | WOA | 4.62 × 10−8 | 1.21 × 10−7 | 0.1804 | ||
| GEO | 9.60 × 10−3 | 9.17 × 10−3 | 1.3803 | GEO | 5.56 × 10−4 | 5.08 × 10−4 | 1.4123 | ||
| GEO_DLS | 1.87 × 10−6 | 3.89 × 10−6 | 1.2409 | GEO_DLS | 3.94 × 10−7 | 7.86 × 10−7 | 1.3110 | ||
| IGEO | 0 | 0 | 0.6167 | IGEO | 1.35 × 10−31 | 2.21 × 10−47 | 0.7423 |
| Algorithm | MAE | Ranking | Algorithm | MAE | Ranking |
|---|---|---|---|---|---|
| IGEO | 9.25 × 10−17 | 1 | GEO | 4.93 × 10−1 | 6 |
| WOA | 8.53 × 10−2 | 2 | GWO | 5.42 × 10−1 | 7 |
| GEO_DLS | 1.61 × 10−1 | 3 | SSA | 1.50 × 100 | 8 |
| PSO | 3.62 × 10−1 | 4 | BOA | 2.59 × 100 | 9 |
| SCA | 4.09 × 10−1 | 5 |
| Fun No. | BOA | GWO | PSO | SCA | ||||
|---|---|---|---|---|---|---|---|---|
| Mean | Std | Mean | Std | Mean | Std | Mean | Std | |
| F1 | 1.80 × 10−14 | 7.59 × 10−16 | 2.55 × 10−34 | 5.00 × 10−34 | 9.66 × 10−1 | 9.73 × 10−1 | 4.16 × 103 | 2.98 × 103 |
| F2 | 2.52 × 1049 | 1.08 × 1050 | 7.94 × 10−21 | 4.65 × 10−21 | 6.07 × 100 | 2.53 × 100 | 1.42 × 100 | 1.98 × 100 |
| F3 | 1.11 × 10−14 | 5.64 × 10−15 | 1.32 × 10−3 | 5.92 × 10−3 | 1.31 × 10−2 | 7.07 × 10−3 | 3.78 × 101 | 2.83 × 101 |
| F4 | 1.14 × 10−11 | 3.99 × 10−13 | 7.01 × 10−14 | 5.09 × 10−15 | 2.29 × 100 | 3.26 × 10−1 | 1.90 × 101 | 4.51 × 100 |
| F5 | 3.32 × 101 | 2.45 × 100 | 3.00 × 101 | 6.44 × 100 | 1.16 × 100 | 9.13 × 10−2 | 1.87 × 101 | 1.13 × 100 |
| F6 | 2.36 × 10−8 | 1.67 × 10−7 | 3.66 × 10−1 | 1.88 × 100 | 4.02 × 102 | 5.38 × 101 | 2.22 × 102 | 1.15 × 102 |
| F7 | 3.29 × 10−1 | 2.96 × 10−2 | 2.60 × 10−1 | 4.95 × 10−2 | 1.30 × 100 | 8.69 × 10−2 | 8.08 × 100 | 2.86 × 100 |
| F8 | 1.06 × 10−29 | 2.55 × 10−30 | 2.87 × 10−41 | 6.96 × 10−41 | 1.19 × 10−42 | 8.93 × 10−44 | 9.62 × 10−29 | 3.19 × 10−28 |
| Fun No. | SSA | WOA | GEO | IGEO | ||||
| Mean | Std | Mean | Std | Mean | Std | Mean | Std | |
| F1 | 9.86 × 10−3 | 7.53 × 10−3 | 5.55 × 10−170 | 0 | 6.94 × 10−1 | 1.47 × 10−1 | 0 | 0 |
| F2 | 1.38 × 101 | 4.25 × 100 | 8.93 × 10−108 | 4.34 × 10−107 | 7.88 × 100 | 1.77 × 100 | 0 | 0 |
| F3 | 1.18 × 10−1 | 2.42 × 10−2 | 4.34 × 10−3 | 2.17 × 10−2 | 4.14 × 10−1 | 6.60 × 10−2 | 0 | 0 |
| F4 | 5.25 × 100 | 1.42 × 100 | 4.01 × 10−15 | 2.55 × 10−15 | 3.95 × 100 | 4.67 × 10−1 | 8.88 × 10−16 | 0 |
| F5 | 1.06 × 101 | 3.70 × 100 | 9.50 × 10−1 | 9.03 × 10−2 | 7.14 × 100 | 1.13 × 100 | 9.00 × 10−1 | 2.24 × 10−16 |
| F6 | 1.34 × 102 | 3.27 × 101 | 0 | 0 | 4.01 × 101 | 5.67 × 100 | 0 | 0 |
| F7 | 5.92 × 100 | 6.35 × 10−1 | 1.38 × 10−1 | 7.79 × 10−2 | 2.41 × 100 | 2.26 × 10−1 | 0 | 0 |
| F8 | 1.82 × 10−42 | 1.54 × 10−42 | −3.60 × 10−1 | 4.85 × 10−1 | 1.18 × 10−42 | 1.42 × 10−44 | −1.00 × 100 | 0 |
| Fun No. | Items | Min | Max | Std | Mean | Fun No. | Items | Min | Max | Std | Mean |
|---|---|---|---|---|---|---|---|---|---|---|---|
| F1 | CMA-ES-RIS | 3.68 × 10−1 | 9.72 × 103 | 2.27 × 103 | 1.34 × 103 | F2 | CMA-ES-RIS | 2.17 × 102 | 1.17 × 103 | 2.66 × 102 | 7.09 × 102 |
| FMMPA | 9.72 × 100 | 5.73 × 101 | 1.20 × 101 | 1.35 × 101 | FMMPA | 7.01 × 100 | 6.89 × 102 | 1.65 × 102 | 3.15 × 102 | ||
| EIW_PSO | 2.18 × 103 | 5.99 × 106 | 1.42 × 104 | 3.47 × 104 | EIW_PSO | 1.21 × 101 | 1.86 × 102 | 1.62 × 102 | 5.44 × 102 | ||
| L-SHADE | 1.46 × 104 | 2.69 × 104 | 9.95 × 103 | 1.83 × 104 | L-SHADE | −1.40 × 103 | 1.13 × 103 | 7.39 × 102 | −5.18 × 102 | ||
| GEO_DLS | 8.21 × 104 | 2.30 × 106 | 5.39 × 105 | 5.66 × 105 | GEO_DLS | 9.57 × 101 | 6.43 × 102 | 1.37 × 102 | 3.84 × 102 | ||
| IGEO | 2.73 × 10−1 | 1.33 × 103 | 2.76 × 102 | 2.01 × 102 | IGEO | 3.54 × 100 | 7.04 × 102 | 2.07 × 102 | 2.42 × 102 | ||
| F3 | CMA-ES-RIS | 1.37 × 101 | 3.84 × 101 | 7.38 × 100 | 2.59 × 101 | F4 | CMA-ES-RIS | 9.87 × 10−3 | 1.74 × 100 | 4.32 × 10−1 | 8.68 × 10−1 |
| FMMPA | 1.35 × 101 | 2.92 × 101 | 4.90 × 100 | 2.14 × 101 | FMMPA | 2.66 × 10−1 | 1.70 × 100 | 3.41 × 10−1 | 7.93 × 10−1 | ||
| EIW_PSO | 2.10 × 101 | 3.93 × 101 | 4.26 × 100 | 3.14 × 101 | EIW_PSO | 9.50 × 101 | 3.49 × 102 | 2.28 × 102 | 2.24 × 102 | ||
| L-SHADE | −1.79 × 103 | 6.15 × 102 | 7.39 × 102 | −9.18 × 102 | L-SHADE | −6.00 × 102 | 1.80 × 103 | 7.39 × 102 | 2.70 × 102 | ||
| GEO_DLS | 1.67 × 101 | 3.02 × 101 | 3.51 × 100 | 2.26 × 101 | GEO_DLS | 9.69 × 10−1 | 2.75 × 100 | 4.81 × 10−1 | 1.71 × 100 | ||
| IGEO | 1.08 × 101 | 1.85 × 101 | 1.81 × 100 | 1.33 × 101 | IGEO | 9.89 × 10−2 | 1.08 × 100 | 2.20 × 10−1 | 5.52 × 10−1 | ||
| F5 | CMA-ES-RIS | 1.48 × 102 | 8.90 × 103 | 2.50 × 103 | 2.53 × 103 | F6 | CMA-ES-RIS | 1.46 × 100 | 5.93 × 102 | 1.21 × 102 | 2.02 × 102 |
| FMMPA | 1.41 × 100 | 4.08 × 101 | 9.35 × 100 | 1.33 × 101 | FMMPA | 8.61 × 10−1 | 1.25 × 101 | 3.76 × 100 | 2.90 × 100 | ||
| EIW_PSO | 4.87 × 103 | 8.83 × 103 | 1.94 × 103 | 1.68 × 103 | EIW_PSO | 2.24 × 102 | 5.07 × 102 | 5.80 × 101 | 3.75 × 102 | ||
| L-SHADE | −8.00 × 102 | 1.61 × 103 | 7.39 × 102 | 7.09 × 101 | L-SHADE | −9.00 × 102 | 1.50 × 103 | 7.41 × 102 | −2.96 × 101 | ||
| GEO_DLS | 8.83 × 102 | 1.11 × 104 | 2.23 × 103 | 2.97 × 103 | GEO_DLS | 3.16 × 100 | 1.21 × 102 | 2.07 × 101 | 1.52 × 101 | ||
| IGEO | 9.33 × 102 | 5.72 × 103 | 1.20 × 103 | 2.36 × 103 | IGEO | 8.44 × 10−1 | 1.24 × 102 | 5.70 × 101 | 4.31 × 101 | ||
| F7 | CMA-ES-RIS | 4.42 × 101 | 1.79 × 103 | 4.22 × 102 | 5.52 × 102 | F8 | CMA-ES-RIS | 1.01 × 102 | 1.16 × 103 | 2.28 × 102 | 1.61 × 102 |
| FMMPA | 1.02 × 10−1 | 3.43 × 100 | 6.27 × 10−1 | 9.16 × 10−1 | FMMPA | 1.16 × 101 | 1.01 × 102 | 2.20 × 101 | 9.46 × 101 | ||
| EIW_PSO | 1.51 × 103 | 7.64 × 105 | 2.14 × 105 | 1.32 × 105 | EIW_PSO | 1.16 × 101 | 1.87 × 103 | 5.75 × 102 | 3.35 × 102 | ||
| L-SHADE | −3.99 × 102, | 2.00 × 103 | 7.22 × 102 | 4.70 × 102 | L-SHADE | −2.00 × 102 | 2.20 × 103 | 7.39 × 102 | 6.70 × 102 | ||
| GEO_DLS | 1.49 × 102 | 1.89 × 103 | 3.76 × 102 | 1.18 × 103 | GEO_DLS | 5.93 × 101 | 1.11 × 102 | 8.96 × 100 | 1.06 × 102 | ||
| IGEO | 5.40 × 102 | 4.61 × 103 | 9.38 × 102 | 2.06 × 103 | IGEO | 1.00 × 102 | 1.06 × 102 | 1.50 × 100 | 1.02 × 102 | ||
| F9 | CMA-ES-RIS | 1.00 × 102 | 5.05 × 102 | 1.11 × 102 | 3.63 × 102 | F10 | CMA-ES-RIS | 3.98 × 102 | 4.46 × 102 | 2.32 × 101 | 4.24 × 102 |
| FMMPA | 1.00 × 102 | 1.00 × 102 | 2.28 × 10−4 | 1.00 × 102 | FMMPA | 3.98 × 102 | 3.98 × 102 | 8.90 × 10−2 | 3.98 × 102 | ||
| EIW_PSO | 3.90 × 102 | 4.24 × 102 | 8.01 × 100 | 4.11 × 102 | EIW_PSO | 4.29 × 102 | 7.49 × 102 | 4.17 × 101 | 5.26 × 102 | ||
| L-SHADE | −1.00 × 102 | 2.64 × 103 | 7.43 × 102 | 1.07 × 103 | L-SHADE | 3.98 × 102 | 2.85 × 103 | 7.39 × 102 | 1.28 × 103 | ||
| GEO_DLS | 1.02 × 102 | 3.43 × 102 | 1.06 × 102 | 1.79 × 102 | GEO_DLS | 3.99 × 102 | 4.46 × 102 | 1.97 × 101 | 4.19 × 102 | ||
| IGEO | 1.00 × 102 | 3.35 × 102 | 4.22 × 101 | 3.23 × 102 | IGEO | 3.98 × 102 | 4.49 × 102 | 2.14 × 101 | 4.33 × 102 |
| Fun No. | p (IGEO-BOA) | p (IGEO-GWO) | p (IGEO-PSO) | p (IGEO-SCA) | p (IGEO-SSA) | p (IGEO-WOA) | p (IGEO-GEO) | p (IGEO-GEO_DLS) |
|---|---|---|---|---|---|---|---|---|
| F1 | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 4.22 × 10−12+ |
| F2 | 3.31 × 10−20+ | 2.29 × 10−16+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ | NAN= | 3.21 × 10−20+ | 4.22 × 10−12+ |
| F3 | 3.31 × 10−20+ | NAN= | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 4.22 × 10−12+ |
| F4 | 3.31 × 10−20+ | 6.73 × 10−23+ | 3.22 × 10−22+ | 6.620 × 10−22+ | 3.31 × 10−20+ | 4.39 × 10−15+ | 2.63 × 10−23+ | 4.22 × 10−12+ |
| F5 | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 7.77 × 10−08+ | 3.31 × 10−20+ | 4.22 × 10−12+ |
| F6 | 5.97 × 10−18+ | 0.1594− | 1.54 × 10−18+ | 0.0822− | 3.31 × 10−20+ | NAN= | 1.37 × 10−18+ | NAN= |
| F7 | 3.31 × 10−20+ | 3.31 × 10−20+ | 2.53 × 10−20+ | 3.31 × 10−20+ | 3.28 × 10−20+ | 3.14 × 10−20+ | 3.31 × 10−20+ | 4.22 × 10−12+ |
| F8 | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 2.29 × 10−16+ | 3.31 × 10−20+ | 4.22 × 10−12+ |
| F9 | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 4.22 × 10−12+ |
| F10 | 0.3271− | 4.58 × 10−10+ | 3.31 × 10−20+ | 3.81 × 10−07+ | 3.31 × 10−20+ | 7.75 × 10−06+ | 3.40 × 10−08+ | NAN= |
| F11 | 3.31 × 10−20+ | 3.31 × 10−20+ | 1.44 × 10−05+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ |
| F12 | 3.31 × 10−20+ | 3.31 × 10−20+ | NAN= | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ | 3.31 × 10−20+ |
| +/=/− | 11/0/1 | 10/1/1 | 11/1/0 | 11/0/1 | 12/0/0 | 10/2/0 | 12/0/0 | 10/2/0 |
| Algorithm | BOA | GWO | PSO | SCA | SSA | WOA | GEO | GEO_DLS | IGEO |
|---|---|---|---|---|---|---|---|---|---|
| Value | 7.08 | 4.50 | 5.00 | 6.17 | 6.92 | 2.83 | 6.50 | 4.58 | 1.42 |
| Rank | 9 | 3 | 5 | 6 | 8 | 2 | 7 | 4 | 1 |
| Algorithm | CMA-ES-RIS | FMMPA | EIW_PSO | L-SHADE | GEO_DLS | IGEO |
|---|---|---|---|---|---|---|
| Value | 4.10 | 1.60 | 5.10 | 3.50 | 3.80 | 2.90 |
| Rank | 5 | 1 | 6 | 3 | 4 | 2 |
| i | Sample 1 vs. Sample 2 | α/i | Null Hypothesis (Ho) | Conclusion | ||
|---|---|---|---|---|---|---|
| 1 | IGEO-WOA | 1.250 | 0.263552 | 0.05 | All algorithms have similar distributions with little difference | Ho accepted for α = 5% since > 0.05 |
| 2 | IGEO-GEO_DLS | 1.708 | 0.126518 | 0.025 | ||
| 3 | IGEO-PSO | 2.250 | 0.044171 | 0.016667 | ||
| 4 | IGEO-GWO | 2.375 | 0.033648 | 0.0125 | ||
| 5 | IGEO-SCA | 3.625 | 0.001186 | 0.01 | Ho rejected for α = 5% since < 0.05 | |
| 6 | IGEO-BOA | 4.000 | 0.000347 | 0.008333 | ||
| 7 | IGEO-GEO | 4.000 | 0.000347 | 0.007143 | ||
| 8 | IGEO-SSA | 4.042 | 0.000300 | 0.00625 | ||
| N | 12 | 34.296 | ||||
| Free degree | 8 | p-value | <0.05 | |||
| i | Sample 1 vs. Sample 2 | α/i | Null Hypothesis (Ho) | Conclusion | ||
|---|---|---|---|---|---|---|
| 1 | IGEO-L-SHADE | 0.600 | 0.473289 | 0.05 | All algorithms have similar distributions with little difference | Ho accepted for α = 5% since > α/i |
| 2 | IGEO-GEO_DLS | 0.900 | 0.282059 | 0.025 | ||
| 3 | IGEO-CMA-ES-RIS | 1.200 | 0.151494 | 0.016667 | ||
| 4 | IGEO-FMMPA | 1.300 | 0.120233 | 0.0125 | ||
| 5 | IGEO-EIW_PSO | 2.200 | 0.008551 | 0.01 | Ho rejected for α = 5% since < α/i | |
| N | 10 | 19.943 | ||||
| Free degree | 5 | p-value | <0.05 | |||
| Fun No. | Algorithm | Mean | Std | Time/s | Fun No. | Algorithm | Mean | Std | Time/s |
|---|---|---|---|---|---|---|---|---|---|
| F1 | GEO | 6.60 × 10−12 | 6.80 × 10−12 | 0.8638 | F2 | GEO | 5.72 × 10−6 | 1.52 × 10−5 | 0.8149 |
| wGEO | 3.37 × 10−169 | 0 | 0.9309 | wGEO | 5.11 × 10−86 | 1.21 × 10−85 | 0.7754 | ||
| pGEO | 1.08 × 10−292 | 0 | 0.9195 | pGEO | 4.81 × 10−154 | 3.12 × 10−153 | 0.7696 | ||
| IGEO | 0 | 0 | 0.7280 | IGEO | 0 | 0 | 0.5939 | ||
| F3 | GEO | 4.34 × 10−3 | 6.04 × 10−3 | 0.8464 | F4 | GEO | 4.30 × 10−15 | 7.03 × 10−16 | 0.8155 |
| wGEO | 0 | 0 | 0.8268 | wGEO | 8.88 × 10−16 | 0 | 0.8186 | ||
| pGEO | 0 | 0 | 0.8384 | pGEO | 8.88 × 10−16 | 0 | 0.8310 | ||
| IGEO | 0 | 0 | 0.8457 | IGEO | 8.88 × 10−16 | 0 | 0.8407 | ||
| F5 | GEO | 2.62 × 100 | 3.85 × 10−1 | 0.9738 | F6 | GEO | 1.77 × 100 | 2.69 × 100 | 0.8146 |
| wGEO | 9.00 × 10−1 | 2.24 × 10−16 | 0.9290 | wGEO | 0 | 0 | 0.8040 | ||
| pGEO | 9.00 × 10−1 | 2.24 × 10−16 | 0.9693 | pGEO | 0 | 0 | 0.8284 | ||
| IGEO | 9.00 × 10−1 | 2.24 × 10−16 | 0.9770 | IGEO | 0 | 0 | 0.8406 | ||
| F7 | GEO | 4.16 × 10−1 | 7.92 × 10−2 | 0.8811 | F8 | GEO | 8.18 × 10−21 | 1.47 × 10−20 | 0.9774 |
| wGEO | 8.03 × 10−3 | 1.37 × 10−2 | 0.9259 | wGEO | −3.75 × 10−1 | 3.62 × 10−1 | 1.0186 | ||
| pGEO | 2.95 × 10−138 | 2.09 × 10−137 | 0.9063 | pGEO | −1.00 × 100 | 0 | 0.9664 | ||
| IGEO | 0 | 0 | 0.7688 | IGEO | −1.00 × 100 | 0 | 1.0303 | ||
| F9 | GEO | 1.30 × 10−93 | 3.43 × 10−93 | 0.7909 | F10 | GEO | 1.50 × 10−125 | 5.30 × 10−125 | 0.8167 |
| wGEO | 1.22 × 10−182 | 0 | 0.8646 | wGEO | 1.79 × 10−211 | 0 | 0.8387 | ||
| pGEO | 1.59 × 10−301 | 0 | 0.8199 | pGEO | 0 | 0 | 0.7478 | ||
| IGEO | 0 | 0 | 0.7652 | IGEO | 0 | 0 | 0.5730 | ||
| F11 | GEO | 7.32 × 10−3 | 7.56 × 10−3 | 1.3881 | F12 | GEO | 5.82 × 10−4 | 6.30 × 10−4 | 1.4014 |
| wGEO | 8.70 × 10−3 | 8.62 × 10−3 | 1.1919 | wGEO | 6.06 × 10−4 | 4.79 × 10−4 | 1.2037 | ||
| pGEO | 3.47 × 10−31 | 3.96 × 10−31 | 0.7713 | pGEO | 1.35 × 10−31 | 2.21 × 10−47 | 0.8097 | ||
| IGEO | 0 | 0 | 0.5874 | IGEO | 1.35 × 10−31 | 2.21 × 10−47 | 0.7579 |
| Algorithm | ||||||||
|---|---|---|---|---|---|---|---|---|
| GWO | PSO | SCA | SSA | WOA | GEO | GEO_DLS | IGEO | |
| x1 | 500 | 48.72684 | 500 | 499.6521 | 500 | 133.2549 | 55.28091 | 0.05 |
| x2 | 500 | 23.28697 | 500 | 499.5754 | 500 | 247.8902 | 446.3305 | 360.2898 |
| x3 | 0.638347 | 0.965432 | 0.638543 | 0.638593 | 0.638346 | 84.3626 | 120 | 120 |
| x4 | 0.05 | 136.826 | 0.05 | 0.05 | 0.05 | 332.6104 | 379.5125 | 500 |
| Best | 0.011315 | 28.85755 | 0.011322 | 0.011324 | 0.011315 | 0.183212 | 0.050632 | 0.000317 |
| Mean | 0.012312 | 1087.541 | 0.01136 | 0.016363 | 0.021033 | 35.19614 | 5.201041 | 0.000317 |
| Std | 0.005458 | 1438.07 | 2.34 × 10−5 | 0.005626 | 0.015908 | 41.32914 | 7.953324 | 5.51 × 10−20 |
| Algorithm | ||||||||
|---|---|---|---|---|---|---|---|---|
| GWO | PSO | SCA | SSA | WOA | GEO | GEO_DLS | IGEO | |
| x1 | 50 | 56.41491 | 50 | 50 | 50 | 10 | 10 | 10 |
| x2 | 80 | 57.61318 | 80 | 80 | 80 | 57.15807 | 10 | 34.67102 |
| x3 | 1.499999 | 1.821976 | 1.499985 | 1.5 | 1.5 | 1.494375 | 5 | 2.340662 |
| x4 | 5 | 6.412176 | 5 | 5 | 5 | 5 | 0.9 | 0.9 |
| Best | 0.012295 | 0.010767 | 0.012295 | 0.012295 | 0.012295 | 0.001644 | 0.001644 | 0.001644 |
| Mean | 0.012295 | 0.025111 | 0.012295 | 0.012295 | 0.012295 | 0.00195 | 0.002334 | 0.001644 |
| Std | 3.11 × 10−12 | 0.008798 | 4.62 × 10−10 | 1.68 × 10−13 | 5.62 × 10−16 | 0.000216 | 0.001078 | 8.82 × 10−19 |
| Algorithm | ||||||||
|---|---|---|---|---|---|---|---|---|
| GWO | PSO | SCA | SSA | WOA | GEO | GEO_DLS | IGEO | |
| x1 | 1.5 | 0.969826 | 1.5 | 1.5 | 1.5 | 0.5 | 0.5 | 0.5 |
| x2 | 0.5 | 1.159815 | 0.5 | 0.5 | 0.5 | 0.5 | 1.5 | 0.5 |
| x3 | 0.5 | 0.752953 | 0.5 | 0.5 | 0.5 | 0.5 | 1.5 | 0.5 |
| x4 | 1.5 | 1.188875 | 1.5 | 2 | 1.5 | 1.5 | 1.5 | 0.5 |
| x5 | 0.5 | 0.650562 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 |
| x6 | 2 | 1.4745 | 2 | 2 | 2 | 0.5 | 1.5 | 0.5 |
| x7 | 0.5 | 0.613342 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 |
| x8 | 0.537 | 0.238309 | 0.537 | 0.537 | 0.537 | 0.345 | 0.192 | 0.192 |
| x9 | 0.192 | 0.272645 | 0.345 | 0.192 | 0.345 | 0.192 | 0.345 | 0.192 |
| x10 | 0 | −1.22153 | 0 | 0 | 0 | −30 | −30 | −30 |
| x11 | 0 | −4.66199 | 0 | 0 | 0 | −30 | −30 | −30 |
| Best | 24.425 | 27.32353 | 24.425 | 26.43 | 24.425 | 22.255 | 22.255 | 21.8829 |
| Mean | 27.7745 | 33.02376 | 24.425 | 28.02457 | 27.27683 | 23.388 | 23.058 | 22.67033 |
| Std | 1.629772 | 11.50943 | 7.23 × 10−15 | 1.185854 | 1.377264 | 0.950917 | 1.132364 | 0.765726 |
| Algorithm | ||||||||
|---|---|---|---|---|---|---|---|---|
| GWO | PSO | SCA | SSA | WOA | GEO | GEO_DLS | IGEO | |
| x1 | 6.021203 | 13.33283 | 5.925464 | 6.018755 | 5.817309 | 5.043958 | 5.733949 | 4.539906 |
| x2 | 5.311574 | 10.6711 | 5.730895 | 5.306471 | 5.746442 | 7.588327 | 3.837676 | 17.7145 |
| x3 | 4.487085 | 36.93033 | 4.41001 | 4.494158 | 4.487412 | 0.01 | 5.845848 | 7.484595 |
| x4 | 3.500028 | 7.705549 | 3.544291 | 3.500494 | 3.493616 | 35.90359 | 3.614627 | 4.238047 |
| x5 | 2.153853 | 26.01948 | 1.968378 | 2.153787 | 2.023312 | 16.6398 | 0.038911 | 5.066114 |
| Best | 1.336526 | 5.891594 | 1.343079 | 1.336521 | 1.342398 | 1.479208 | 1.374305 | 1.179635 |
| Mean | 1.336557 | 7.772976 | 1.380032 | 1.336529 | 1.433402 | 1.642724 | 1.515431 | 1.370618 |
| Std | 2.76 × 10−5 | 0.969485 | 0.022838 | 6.10 × 10−6 | 0.07762 | 0.072901 | 0.066534 | 0.073602 |
| Algorithm | ||||||||
|---|---|---|---|---|---|---|---|---|
| GWO | PSO | SCA | SSA | WOA | GEO | GEO_DLS | IGEO | |
| x1 | 0.788599 | 0.768879 | 0.788357 | 0.788649 | 0.789717 | 0.799781 | 0.79896 | 0.765336 |
| x2 | 0.408375 | 0.381687 | 0.408994 | 0.408235 | 0.405222 | 0.269902 | 0.626887 | 0.674236 |
| Best | 263.8915 | 259.8307 | 263.8942 | 263.8915 | 263.8923 | 264.1117 | 264.1828 | 259.8111 |
| Mean | 263.892 | 261.3095 | 265.215 | 263.8915 | 264.3333 | 265.4653 | 266.1265 | 259.8717 |
| Std | 0.000989 | 1.432297 | 4.791442 | 4.60 × 10−7 | 0.683376 | 1.090409 | 1.748286 | 0.035903 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, J.; Zhang, D.; Li, L.; He, Q. A Nonlinear Convex Decreasing Weights Golden Eagle Optimizer Technique Based on a Global Optimization Strategy. Appl. Sci. 2023, 13, 9394. https://doi.org/10.3390/app13169394
Deng J, Zhang D, Li L, He Q. A Nonlinear Convex Decreasing Weights Golden Eagle Optimizer Technique Based on a Global Optimization Strategy. Applied Sciences. 2023; 13(16):9394. https://doi.org/10.3390/app13169394
Chicago/Turabian StyleDeng, Jiaxin, Damin Zhang, Lun Li, and Qing He. 2023. "A Nonlinear Convex Decreasing Weights Golden Eagle Optimizer Technique Based on a Global Optimization Strategy" Applied Sciences 13, no. 16: 9394. https://doi.org/10.3390/app13169394
APA StyleDeng, J., Zhang, D., Li, L., & He, Q. (2023). A Nonlinear Convex Decreasing Weights Golden Eagle Optimizer Technique Based on a Global Optimization Strategy. Applied Sciences, 13(16), 9394. https://doi.org/10.3390/app13169394