
Closed-Form Analytical Solutions for the Deflection of Elastic Beams in a Peridynamic Framework



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Peridynamic Beam Theory
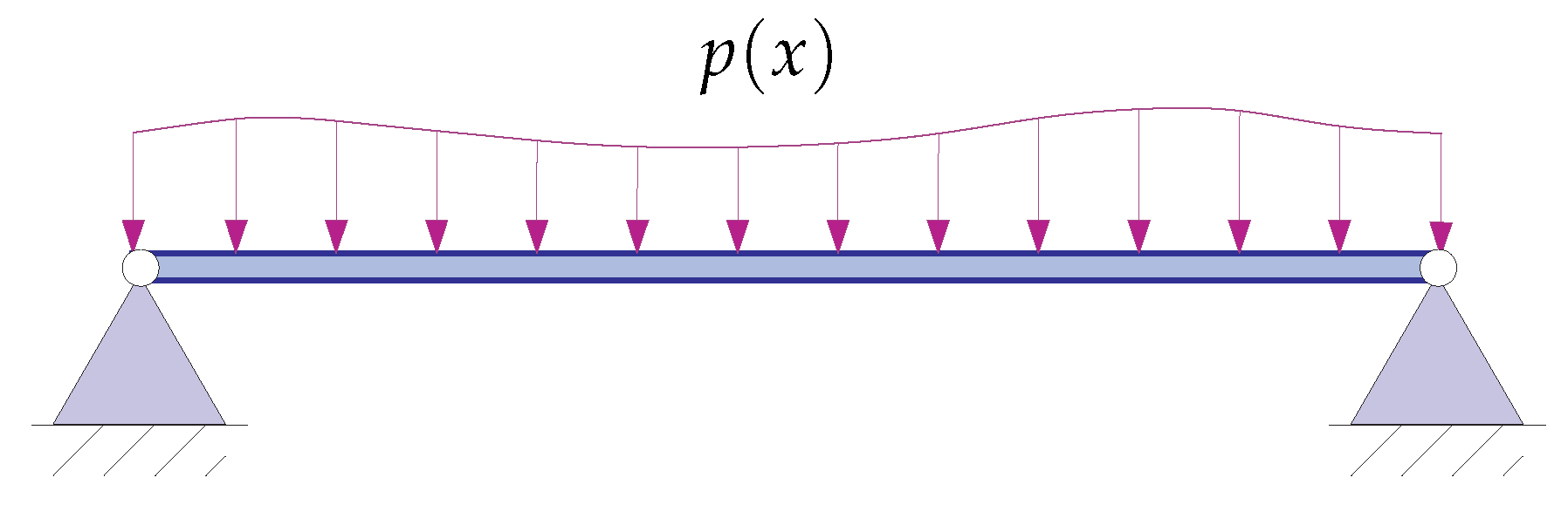
2.1. Classical Equations and Assumptions
2.2. Peridynamic Equations of Motion
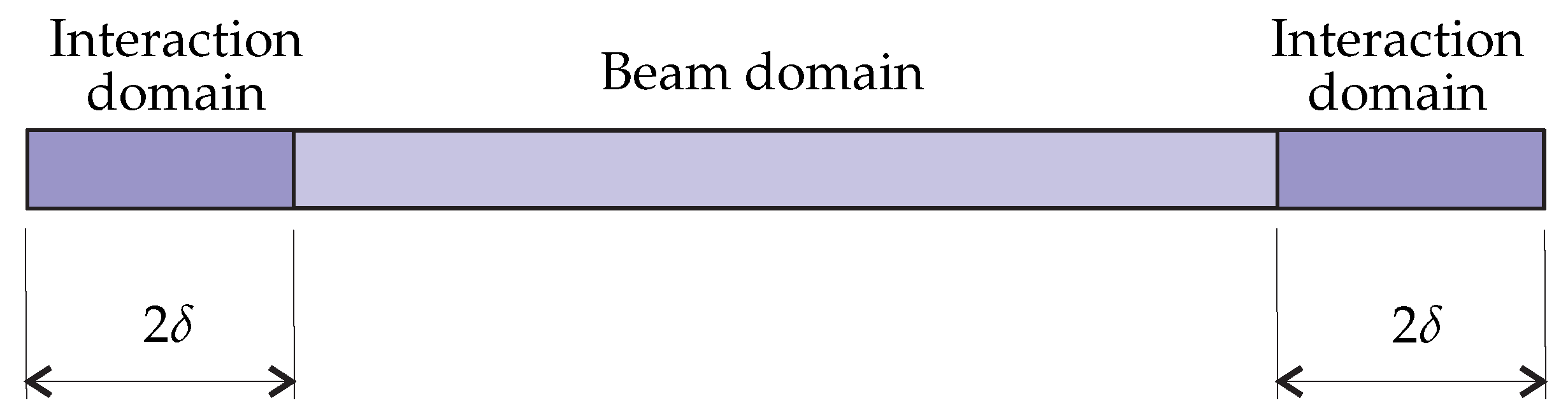
2.3. Peridynamic Boundary Conditions
2.3.1. Simple Support
2.3.2. Roller Clamped Edge
3. Analytical Solutions to Peristatic Problems
3.1. Simply Supported Beam
3.2. Clamped–Simply Supported Beam
3.3. Clamped–Clamped Beam
3.4. Simply Supported–Roller-Clamped Beam
3.5. Clamped–Roller-Clamped Beam
3.6. Cantilever Beam
- Place a fictitious simple support at the free end.
- Transit the origin to be level with the free end and then subtract the corresponding rigid body motion.
- Release the vertical displacement constraint and replace it with the corresponding shear force Q.
4. Analytical Solutions to Peridynamic Problems
5. Examples
5.1. Peristatic Solutions
- Simply supported–simply supportedbased on PD andbased on CBT.
- Clamped–simply supportedbased on PD andbased on CBT.
- Clamped–clampedbased on PD andbased on CBT.
- Simply supported–roller-clampedbased on PD andbased on CBT.
- Clamped–roller-clampedbased on PD andbased on CBT
- Cantilever beambased on PD andbased on CBT
5.2. Peridynamic Solutions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bertram, A. Compendium on Gradient Materials; Springer: Cham, Switzerland, 2023. [Google Scholar] [CrossRef]
- Eremeyev, V.A. Strong Ellipticity and Infinitesimal Stability within Nth-Order Gradient Elasticity. Mathematics 2023, 11, 1024. [Google Scholar] [CrossRef]
- Cordero, N.M.; Forest, S.; Busso, E.P. Second strain gradient elasticity of nano-objects. J. Mech. Phys. Solids 2016, 97, 92–124. [Google Scholar] [CrossRef]
- Wang, B.; Zhao, J.; Zhou, S. A micro scale Timoshenko beam model based on strain gradient elasticity theory. Eur. J. Mech. A/Solids 2010, 29, 591–599. [Google Scholar] [CrossRef]
- Silling, S.A.; Lehoucq, R.B. Peridynamic theory of solid mechanics. Adv. Appl. Mech. 2010, 44, 73–168. [Google Scholar] [CrossRef]
- Silling, S.A. Introduction to peridynamics. In Handbook of Peridynamic Modeling; CRC Press: Boca Raton, FL, USA, 2016; pp. 63–98. [Google Scholar]
- Timoshenko, S.P.; Woinowsky-Krieger, S. Theory of Plates and Shells; McGraw-Hill: New York, NY, USA, 1959. [Google Scholar]
- Naumenko, K.; Pander, M.; Würkner, M. Damage patterns in float glass plates: Experiments and peridynamics analysis. Theor. Appl. Fract. Mech. 2022, 118, 103264. [Google Scholar] [CrossRef]
- Aßmus, M.; Naumenko, K.; Altenbach, H. A multiscale projection approach for the coupled global–local structural analysis of photovoltaic modules. Compos. Struct. 2016, 158, 340–358. [Google Scholar] [CrossRef]
- Chen, J. Nonlocal Euler-Bernoulli Beam Theories: A Comparative Study; Springer: Cham, Switzerland, 2021. [Google Scholar]
- Shen, G.; Xia, Y.; Hu, P.; Zheng, G. Construction of peridynamic beam and shell models on the basis of the micro-beam bond obtained via interpolation method. Eur. J. Mech. A/Solids 2021, 86, 104174. [Google Scholar] [CrossRef]
- Yang, Z.; Naumenko, K.; Ma, C.C.; Oterkus, E.; Oterkus, S. Peridynamic analysis of curved elastic beams. Eur. J. Mech. A/Solids 2023, 101, 105075. [Google Scholar] [CrossRef]
- Vazic, B.; Oterkus, E.; Oterkus, S. Peridynamic model for a Mindlin plate resting on a Winkler elastic foundation. J. Peridyn. Nonlocal Model. 2020, 2, 229–242. [Google Scholar] [CrossRef]
- Silling, S.A.; Bobaru, F. Peridynamic modeling of membranes and fibers. Int. J. Non-Linear Mech. 2005, 40, 395–409. [Google Scholar] [CrossRef]
- Chowdhury, S.R.; Roy, P.; Roy, D.; Reddy, J. A peridynamic theory for linear elastic shells. Int. J. Solids Struct. 2016, 84, 110–132. [Google Scholar] [CrossRef]
- Naumenko, K.; Eremeyev, V.A. A non-linear direct peridynamics plate theory. Compos. Struct. 2022, 279, 114728. [Google Scholar] [CrossRef]
- Taylor, M.; Steigmann, D.J. A two-dimensional peridynamic model for thin plates. Math. Mech. Solids 2015, 20, 998–1010. [Google Scholar] [CrossRef]
- Roy, P.; Behera, D.; Madenci, E. Peridynamic modeling of elastic instability and failure in lattice beam structures. Comput. Methods Appl. Mech. Eng. 2023, 415, 116210. [Google Scholar] [CrossRef]
- Silling, S.A.; Askari, E. A meshfree method based on the peridynamic model of solid mechanics. Comput. Struct. 2005, 83, 1526–1535. [Google Scholar] [CrossRef]
- Ren, B.; Wu, C.; Askari, E. A 3D discontinuous Galerkin finite element method with the bond-based peridynamics model for dynamic brittle failure analysis. Int. J. Impact Eng. 2017, 99, 14–25. [Google Scholar] [CrossRef]
- Dorduncu, M. Peridynamic modeling of delaminations in laminated composite beams using refined zigzag theory. Theor. Appl. Fract. Mech. 2021, 112, 102832. [Google Scholar] [CrossRef]
- Lu, W.; Oterkus, S.; Oterkus, E.; Zhang, D. Modelling of cracks with frictional contact based on peridynamics. Theor. Appl. Fract. Mech. 2021, 116, 103082. [Google Scholar] [CrossRef]
- Zhang, Y.; Deng, H.; Deng, J.; Liu, C.; Yu, S. Peridynamic simulation of crack propagation of non-homogeneous brittle rock-like materials. Theor. Appl. Fract. Mech. 2020, 106, 102438. [Google Scholar] [CrossRef]
- Mikata, Y. Analytical solutions of peristatic and peridynamic problems for a 1D infinite rod. Int. J. Solids Struct. 2012, 49, 2887–2897. [Google Scholar] [CrossRef]
- Silling, S.A.; Zimmermann, M.; Abeyaratne, R. Deformation of a peridynamic bar. J. Elast. 2003, 73, 173–190. [Google Scholar] [CrossRef]
- Nishawala, V.V.; Ostoja-Starzewski, M. Peristatic solutions for finite one-and two-dimensional systems. Math. Mech. Solids 2017, 22, 1639–1653. [Google Scholar] [CrossRef]
- Yang, Z.; Naumenko, K.; Altenbach, H.; Ma, C.C.; Oterkus, E.; Oterkus, S. Some analytical solutions to peridynamic beam equations. ZAMM J. Appl. Math. Mech. 2022, 102, e202200132. [Google Scholar] [CrossRef]
- Yang, Z.; Naumenko, K.; Ma, C.C.; Altenbach, H.; Oterkus, E.; Oterkus, S. Some closed form series solutions to peridynamic plate equations. Mech. Res. Commun. 2022, 126, 104000. [Google Scholar] [CrossRef]
- Mikata, Y. Linear peridynamics for isotropic and anisotropic materials. Int. J. Solids Struct. 2019, 158, 116–127. [Google Scholar] [CrossRef]
- Mikata, Y. Analytical solutions of peristatics and peridynamics for 3D isotropic materials. Eur. J. Mech. A/Solids 2023, 101, 104978. [Google Scholar] [CrossRef]















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Naumenko, K.; Ma, C.-C.; Chen, Y. Closed-Form Analytical Solutions for the Deflection of Elastic Beams in a Peridynamic Framework. Appl. Sci. 2023, 13, 10025. https://doi.org/10.3390/app131810025
Yang Z, Naumenko K, Ma C-C, Chen Y. Closed-Form Analytical Solutions for the Deflection of Elastic Beams in a Peridynamic Framework. Applied Sciences. 2023; 13(18):10025. https://doi.org/10.3390/app131810025
Chicago/Turabian StyleYang, Zhenghao, Konstantin Naumenko, Chien-Ching Ma, and Yang Chen. 2023. "Closed-Form Analytical Solutions for the Deflection of Elastic Beams in a Peridynamic Framework" Applied Sciences 13, no. 18: 10025. https://doi.org/10.3390/app131810025
APA StyleYang, Z., Naumenko, K., Ma, C.-C., & Chen, Y. (2023). Closed-Form Analytical Solutions for the Deflection of Elastic Beams in a Peridynamic Framework. Applied Sciences, 13(18), 10025. https://doi.org/10.3390/app131810025