
Noise-Tolerant Data Reconstruction Based on Convolutional Autoencoder for Wireless Sensor Network †


Abstract
:1. Introduction
- We analyzed the impact of noise caused by harsh weather conditions, such as rain, snow, and fog. We also considered the effect of noise due to internal factors, such as thermal noise.
- We successfully adopted a stacked convolutional autoencoder (SCAE) to reconstruct the data affected by this noise.
- We conducted extensive experiments to demonstrate the outstanding performance of the proposed model in terms of training and testing errors.
2. Related Work
2.1. External Events
2.2. Internal Events
3. Noise Model
3.1. External Noise
3.1.1. Rainfall Attenuation Model
3.1.2. Snow Attenuation Model
3.1.3. Fog Attenuation Model
3.1.4. Weather Noise
3.2. Internal Noise
4. Methodology
4.1. Data Preprocessing
4.2. Convolutional Autoencoder for Data Reconstruction
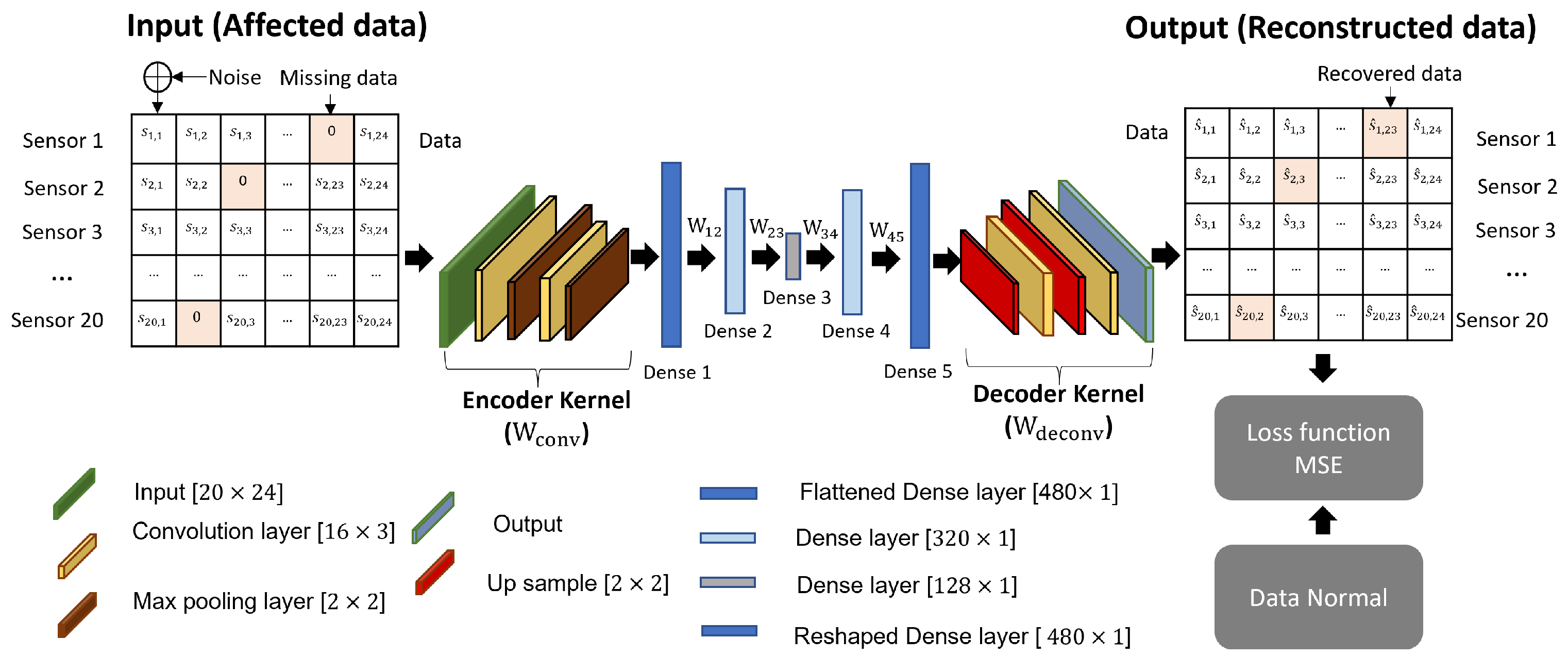
4.3. Proposed Stacked Convolutional Autoencoder for Data Reconstruction
4.3.1. Step 1: Recursive Pretraining of the Weights
4.3.2. Step 2: Use the Preinitialized Weights from Step 1 to Train the Entire SCAE Network
5. Experiment and Evaluation
5.1. Experimental Settings
5.2. Performance Evaluation
- Partial least squares regression (PLSR): PLSR [35] models each relationship in multivariable data using statistical techniques. Based on the detected correlation, it is possible to make predictions for data that are influenced by noise.
- Bidirectional recurrent neural network (Bi-RNN): Bi-RNN [18] can capture temporal dependencies in both the forward and reverse orientations. Bi-RNN can effectively denoise and reconstruct data sequences.
- Convolutional autoencoder (CAE): The CAE [31] inherits the data recovery capabilities of the AE network. Additionally, the combination with a convolutional network helps the CAE handle effectively two-dimensional data.
5.2.1. Impact of the Dense Layers on the SCAE Model
5.2.2. Performance Comparison
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kadir, E.A.; Irie, H.; Rosa, S.L. Modeling of wireless sensor networks for detection land and forest fire hotspot. In Proceedings of the 2019 International Conference on Electronics, Information, and Communication (ICEIC), Auckland, New Zealand, 22–25 January 2019; pp. 1–5. [Google Scholar]
- Sadeghi, S.; Soltanmohammadlou, N.; Nasirzadeh, F. Applications of wireless sensor networks to improve occupational safety and health in underground mines. J. Saf. Res. 2022, 83, 8–25. [Google Scholar] [CrossRef] [PubMed]
- Luo, J.; Chen, Y.; Wu, M.; Yang, Y. A survey of routing protocols for underwater wireless sensor networks. IEEE Commun. Surv. Tutor. 2021, 23, 137–160. [Google Scholar] [CrossRef]
- Simon, G.; Maróti, M.; Lédeczi, A.; Balogh, G.; Kusy, B.; Nádas, A.; Pap, G.; Sallai, J.; Frampton, K. Sensor Network-Based Countersniper System. In Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems, Baltimore, MD, USA, 3–5 November 2004; pp. 1–12. [Google Scholar] [CrossRef]
- Yick, J.; Mukherjee, B.; Ghosal, D. Analysis of a prediction-based mobility adaptive tracking algorithm. In Proceedings of the 2nd International Conference on Broadband Networks, Boston, MA, USA, 7 October 2005; Volume 1, pp. 753–760. [Google Scholar] [CrossRef]
- Castillo-Effer, M.; Quintela, D.; Moreno, W.; Jordan, R.; Westhoff, W. Wireless sensor networks for flash-flood alerting. In Proceedings of the Fifth IEEE International Caracas Conference on Devices, Circuits and Systems, Punta Cana, Dominican, 3–5 November 2004; Volume 1, pp. 142–146. [Google Scholar] [CrossRef]
- Rahman, M.; Rahman, S.; Mansoor, S.; Deep, V.; Aashkaar, M. Implementation of ICT and Wireless Sensor Networks for Earthquake Alert and Disaster Management in Earthquake Prone Areas. Procedia Comput. Sci. 2016, 85, 92–99. [Google Scholar] [CrossRef]
- Gao, T.; Greenspan, D.; Welsh, M.; Juang, R.; Alm, A. Vital Signs Monitoring and Patient Tracking Over a Wireless Network. In Proceedings of the 2005 IEEE Engineering in Medicine and Biology 27th Annual Conference, Shanghai, China, 17–18 January 2006; pp. 102–105. [Google Scholar] [CrossRef]
- Lorincz, K.; Malan, D.; Fulford-Jones, T.; Nawoj, A.; Clavel, A.; Shnayder, V.; Mainland, G.; Welsh, M.; Moulton, S. Sensor networks for emergency response: Challenges and opportunities. IEEE Pervasive Comput. 2004, 3, 16–23. [Google Scholar] [CrossRef]
- Saeed, U.; Jan, S.U.; Lee, Y.D.; Koo, I. Fault diagnosis based on extremely randomized trees in wireless sensor networks. Reliab. Eng. Syst. Saf. 2021, 205, 107284. [Google Scholar] [CrossRef]
- Du, J.; Chen, H.; Zhang, W. A deep learning method for data recovery in sensor networks using effective spatio-temporal correlation data. Sens. Rev. 2018, 39, 208–217. [Google Scholar] [CrossRef]
- El-Sayed, W.M.; El-Bakry, H.M.; El-Sayed, S.M. Integrated data reduction model in wireless sensor networks. Appl. Comput. Inform. 2020, 19, 41–63. [Google Scholar] [CrossRef]
- Fan, G.; Li, J.; Hao, H. Using deep learning technique for recovering the lost measurement data. In EASEC16; Springer: Berlin/Heidelberg, Germany, 2021; pp. 229–237. [Google Scholar]
- Song, X.; Guo, Y.; Li, N.; Yang, S. A novel approach based on matrix factorization for recovering missing time series sensor data. IEEE Sens. J. 2020, 20, 13491–13500. [Google Scholar] [CrossRef]
- Kortas, M.; Habachi, O.; Bouallegue, A.; Meghdadi, V.; Ezzedine, T.; Cances, J.P. Robust Data Recovery in Wireless Sensor Network: A Learning-Based Matrix Completion Framework. Sensors 2021, 21, 1016. [Google Scholar] [CrossRef] [PubMed]
- Zaid, Y.; Zhang, B.; Ismael, W.M.; Xie, Y.; Surname, G.N.; Wang, H. ST-MLR: A Spatio-temporal Multiple Linear Regression Missing Data Reconstruction Approach for Improving WSN Data Reliability. In Proceedings of the 2021 International Congress of Advanced Technology and Engineering (ICOTEN), Taiz, Yemen, 4–5 July 2021; pp. 1–6. [Google Scholar]
- Chen, Z.; Chen, L.; Hu, G.; Ye, W.; Zhang, J.; Yang, G. Data reconstruction in wireless sensor networks from incomplete and erroneous observations. IEEE Access 2018, 6, 45493–45503. [Google Scholar] [CrossRef]
- Jeong, S.; Ferguson, M.; Hou, R.; Lynch, J.P.; Sohn, H.; Law, K.H. Sensor data reconstruction using bidirectional recurrent neural network with application to bridge monitoring. Adv. Eng. Inform. 2019, 42, 100991. [Google Scholar] [CrossRef]
- Jana, D.; Nagarajaiah, S.; Yang, Y.; Li, S. Real-time cable tension estimation from acceleration measurements using wireless sensors with packet data losses: Analytics with compressive sensing and sparse component analysis. J. Civ. Struct. Health Monit. 2022, 12, 797–815. [Google Scholar] [CrossRef]
- Tay, D.B. Sensor network data denoising via recursive graph median filters. Signal Process. 2021, 189, 108302. [Google Scholar] [CrossRef]
- Jana, D.; Patil, J.; Herkal, S.; Nagarajaiah, S.; Duenas-Osorio, L. CNN and Convolutional Autoencoder (CAE) based real-time sensor fault detection, localization, and correction. Mech. Syst. Signal Process. 2022, 169, 108723. [Google Scholar] [CrossRef]
- International Telecommunication Union Specific Attenuation Model for Rain for Use in Prediction Methods. 2005. Available online: https://www.itu.int/rec/R-REC-P.838 (accessed on 22 August 2023).
- Regonesi, E.; Luini, L.; Riva, C. Limitations of the ITU-R P.838-3 model for rain specific attenuation. In Proceedings of the 2019 13th European Conference on Antennas and Propagation (EuCAP), Krakow, Poland, 31 March–5 April 2019; pp. 1–4. [Google Scholar]
- Fares, M.A.; Fares, S.C.; Ventrice, C.A. Attenuation of the electromagnetic waves due to moist and wet snow. In Proceedings of the Proceedings 2007 IEEE SoutheastCon, Richmond, VA, USA, 22–25 March 2007; pp. 99–104. [Google Scholar]
- International Telecommunication Union Recommendation ITU-R P.840-7. Attenuation Due to Clouds and Fog. P Series. Radiowave Propagation. 2017. Available online: https://www.itu.int/dms_pubrec/itu-r/rec/p/R-REC-P.840-7-201712-S!!PDF-E.pdf (accessed on 22 August 2023).
- Manabe, T.; Liebe, H.J.; Hufford, G.A. Complex permittivity of water between 0 and 30 thz. In Proceedings of the 1987 Twelth International Conference on Infrared and Millimeter Waves, Lake Buena Vista, FL, USA, 14–18 December 1987; pp. 229–230. [Google Scholar] [CrossRef]
- Kurt, S.; Tavli, B. Path Loss Modeling for Wireless Sensor Networks: Review of Models and Comparative Evaluations. IEEE Antennas Propag. Mag. 2016, 59, 18–37. [Google Scholar] [CrossRef]
- Laiou, A.; Malliou, C.; Lenas, S.A.; Tsaoussidis, V. Autonomous Fault Detection and Diagnosis in Wireless Sensor Networks using Decision Trees. J. Commun. 2019, 14, 544–552. [Google Scholar] [CrossRef]
- Zhan, Z.; Villemaud, G.; Gorce, J.M. Analysis and reduction of the impact of thermal noise on the Full-Duplex OFDM radio. In Proceedings of the 2014 IEEE Radio and Wireless Symposium (RWS), Newport Beach, CA, USA, 19–23 January 2014; pp. 220–222. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambride, MA, USA, 2016. [Google Scholar]
- Mao, X.J.; Shen, C.; Yang, Y.B. Image restoration using convolutional auto-encoders with symmetric skip connections. arXiv 2016, arXiv:1606.08921. [Google Scholar]
- Masci, J.; Meier, U.; Cireşan, D.; Schmidhuber, J. Stacked convolutional auto-encoders for hierarchical feature extraction. In Artificial Neural Networks and Machine Learning—ICANN 2011: 21st International Conference on Artificial Neural Networks, Espoo, Finland, June 14–17, 2011, Proceedings, Part I 21; Springer: Berlin/Heidelberg, Germany, 2011; pp. 52–59. [Google Scholar]
- Heinzelman, W.; Chandrakasan, A.; Balakrishnan, H. An application-specific protocol architecture for wireless microsensor networks. IEEE Trans. Wirel. Commun. 2002, 1, 660–670. [Google Scholar] [CrossRef]
- Li, Y.Z.; Zhang, A.L.; Liang, Y.Z. Improvement of Leach Protocol for Wireless Sensor Networks. In Proceedings of the 2013 Third International Conference on Instrumentation, Measurement, Computer, Communication and Control, Shenyang, China, 21–23 September 2013; pp. 322–326. [Google Scholar] [CrossRef]
- Hou, M.; Chaib-draa, B. Online incremental higher-order partial least squares regression for fast reconstruction of motion trajectories from tensor streams. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 6205–6209. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Paper | Year | Type | Dataset | Purpose | Method |
|---|---|---|---|---|---|
| [14] | 2020 | External events | Real data | Reconstructing missing data | Algorithm |
| [12] | 2020 | External events | Real data and noise | Reconstructing missing data | Algorithm |
| [15] | 2021 | External events | Simulated data | Reconstructing missing data | Algorithm |
| [16] | 2021 | External events | Real data | Reconstructing missing data | Machine learning |
| [13] | 2021 | External events | Real data and noise | Reconstructing lost data | Deep learning |
| [17] | 2018 | Internal events | Real data | Reconstructing data | Algorithm |
| [18] | 2021 | Internal events | Real data | Reconstructing data | Bidirectional recurrent neural network |
| [19] | 2022 | Internal events | Real data | Reconstructing data | Algorithm |
| [20] | 2021 | Internal events | Real data and noise | Denoising data | Algorithm |
| [21] | 2022 | Internal events | Real data and noise | Reconstructing data | Convolutional neural network |
| Parameter | Value |
|---|---|
| Elevation angle | 0 |
| Tilt angle | 0 |
| Signal carrier frequency f | GHz |
| Rain rate (rainfall) | 10 mm/h |
| Liquid water content (wet snow) | mm/h |
| Liquid water density (fog) | g/m3 |
| Cloud liquid water temperature T (fog) | K |
| Parameter | Value |
|---|---|
| Number of nodes | 20 |
| Number of clusters | 2 |
| Amount of data for each node | 67,680 |
| Sample time | 1 h |
| Size of packet header | |
| Size of data packet | |
| Routing protocol | LEACH |
| Number of Dense Layers | 0 | 1 | 3 | 5 | 7 |
|---|---|---|---|---|---|
| Training Error (%) | |||||
| Testing Error (%) |
| Algorithm | Training Errors % | Testing Errors % |
|---|---|---|
| Partial Least Squares Regression | ||
| Bidirectional RNN | ||
| CAE | ||
| SCAE | 1.06 | 1.09 |
| Weather Condition | Level of Weather Conditions | Training Error (%) | Testing Error (%) |
|---|---|---|---|
| Rain () | Light (1 mm/h) | ||
| Moderate ( mm/h) | |||
| Heavy (10 mm/h) | |||
| Wet snow () | Light (1 mm/h) | ||
| Moderate ( mm/h) | |||
| Heavy ( mm/h) | |||
| Fog () | Light ( g/m3) | ||
| Medium ( g/m3) | |||
| Thick ( g/m3) |
| Dataset | Algorithm | Training | Testing |
|---|---|---|---|
| Error (%) | Error (%) | ||
| Temperature | CAE | ||
| SCAE | 0.36 | 0.44 | |
| AQI | CAE | ||
| SCAE | 0.89 | 1.03 | |
| CAE | |||
| SCAE | 1.23 | 1.241 | |
| PM 10 | CAE | ||
| SCAE | 2.82 | 3.01 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lai, T.T.; Tran, T.P.; Cho, J.; Yoo, M. Noise-Tolerant Data Reconstruction Based on Convolutional Autoencoder for Wireless Sensor Network. Appl. Sci. 2023, 13, 10090. https://doi.org/10.3390/app131810090
Lai TT, Tran TP, Cho J, Yoo M. Noise-Tolerant Data Reconstruction Based on Convolutional Autoencoder for Wireless Sensor Network. Applied Sciences. 2023; 13(18):10090. https://doi.org/10.3390/app131810090
Chicago/Turabian StyleLai, Trinh Thuc, Tuan Phong Tran, Jaehyuk Cho, and Myungsik Yoo. 2023. "Noise-Tolerant Data Reconstruction Based on Convolutional Autoencoder for Wireless Sensor Network" Applied Sciences 13, no. 18: 10090. https://doi.org/10.3390/app131810090
APA StyleLai, T. T., Tran, T. P., Cho, J., & Yoo, M. (2023). Noise-Tolerant Data Reconstruction Based on Convolutional Autoencoder for Wireless Sensor Network. Applied Sciences, 13(18), 10090. https://doi.org/10.3390/app131810090