
Design and Analysis of a Stable Support Structure for a Near-Infrared Space-Borne Doppler Asymmetric Spatial Heterodyne Interferometer
Abstract
:1. Introduction
2. Principle of DASH Interferometer
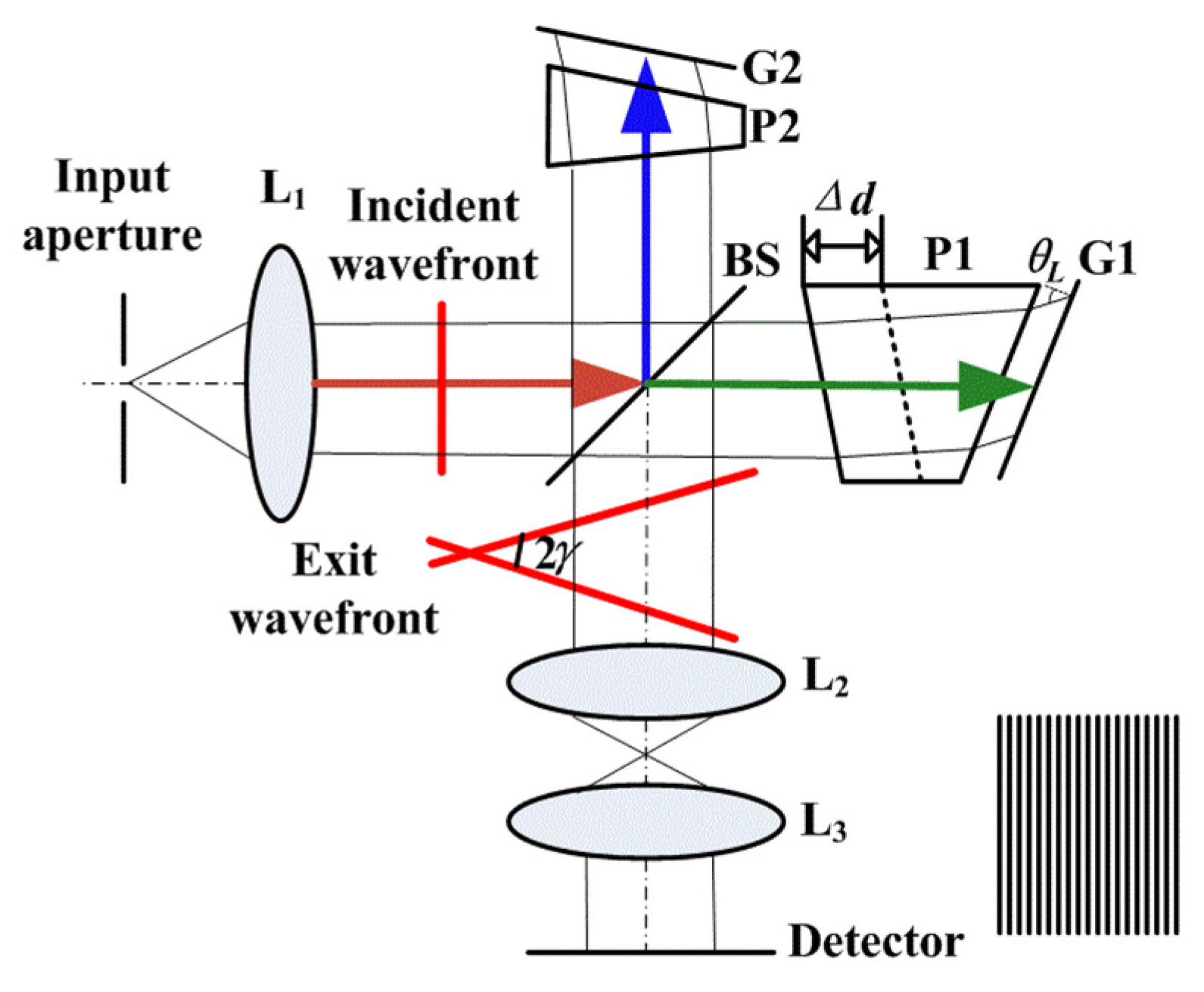
2.1. Principle of DASH
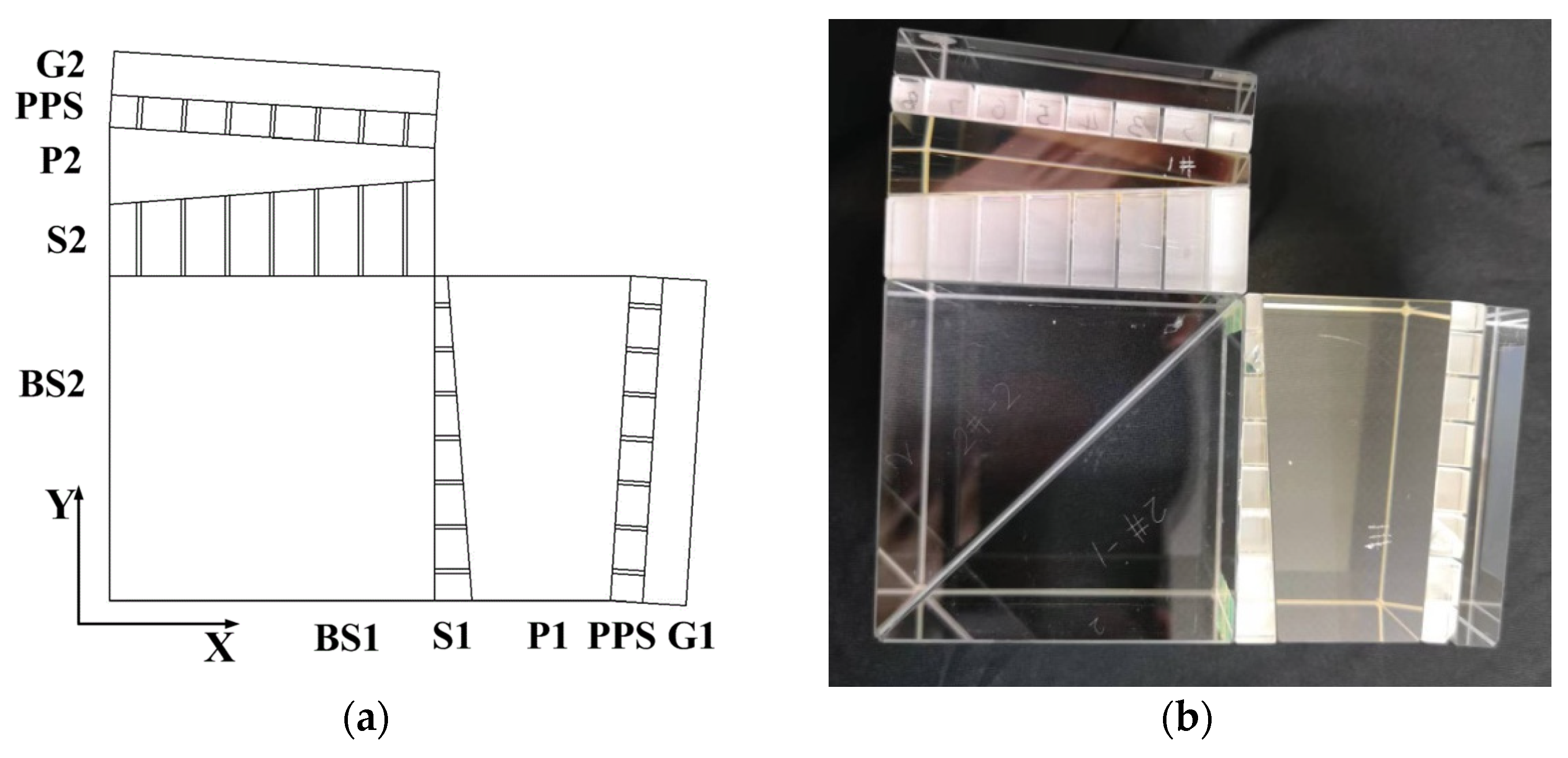
2.2. DASH Interferometer Configuration
3. DASH Interferometer Mount
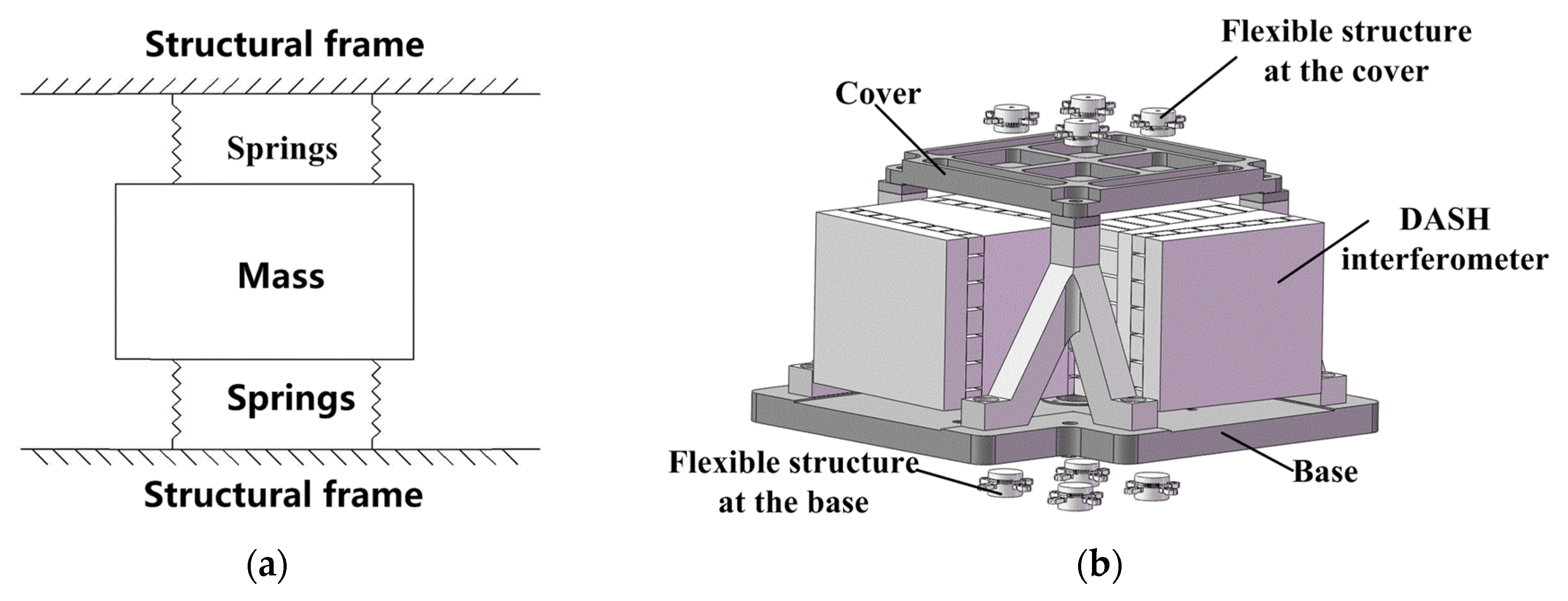
3.1. Framing System for Flexible Support
- The structural frame is designed as a rigid structure compared to the Mass.
- The spring constants of flexible structures are optimized to adjust the natural frequency of the DASH interferometer assembly. The lower spring, which plays a position-supporting role, is permitted to be much stiffer than the top spring, which plays a mounting role.
- The optical elements and flexures move together during the vibration tests, and the maximum deformation is in the flexible structure. The maximum stresses on the structure are lower than the tensile strength of the materials. The gluing interface strengths at the two gluing interfaces (metal-to-glass gluing and glass-to-glass gluing) are less than the shearing strength of the epoxy adhesive bonding. Moreover, certain safety margins are incorporated.
- Materials and configuration are selected to decrease heat conduction.
3.2. Design of Structural Frame
3.2.1. Design of Base and Cover
3.2.2. Design of the Column
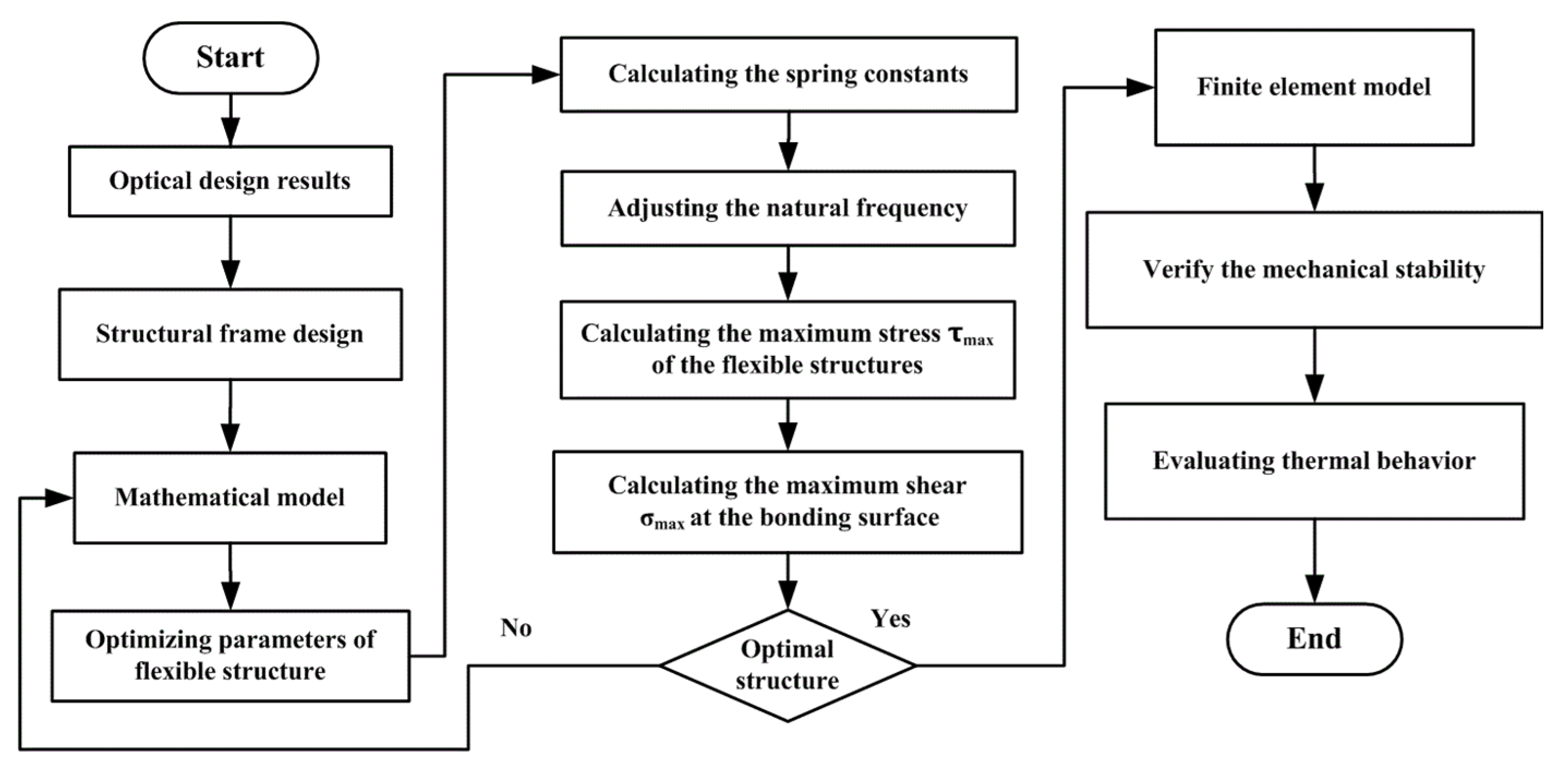
3.3. Optimizing the Flexible Structure
3.3.1. Optimal Design of Spring Constant
3.3.2. Optimal Phase Position for Flexible Structures
3.3.3. Optimal Parameters of Flexible Structure
3.4. Finite Element Analysis
3.5. Low Heat Conduction Behavior
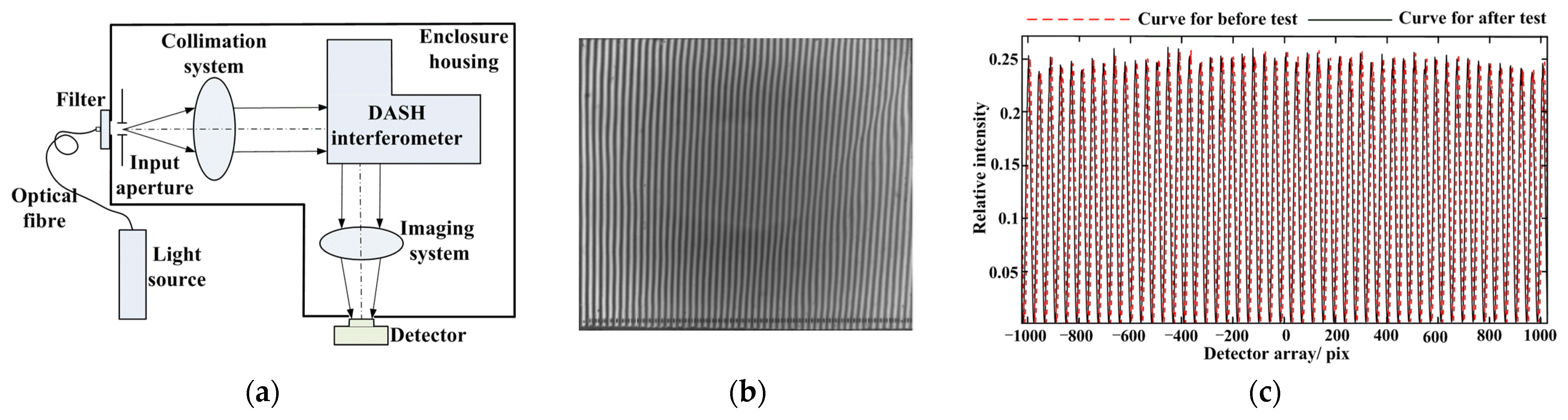
4. Tests
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Erdogan, E.; Altunbas, I.; Kurt, G.K.; Yanikomeroglu, H. Cooperation in space: HAPS-aided optical inter-satellite connectivity with opportunistic scheduling. IEEE Commun. 2022, 26, 882–886. [Google Scholar] [CrossRef]
- Mirza, J.; Atieh, A.; Menhas, M.I.; Ghafoor, S.; Magam, M.; Jamal, L.; Sheikh, S.I.M.; Qureshi, K.L. Design of an efficient thulium-doped fiber amplifier for dual-hop earth to satellite optical wireless links. Ain Shams Eng. J. 2023, 14, 101983. [Google Scholar] [CrossRef]
- Skinner, W.R.; Hays, P.B.; Grassl, H.J.; Gell, D.A.; Burrage, M.D.; Marshall, A.R.; Ortland, D.A. High-resolution Doppler imager on the upper atmosphere research satellite. SPIE Proc. 1994, 2266, 281–293. [Google Scholar]
- Skinner, W.R.; Niciejewski, R.J.; Killeen, T.L.; Solomon, S.C.; Gablehouse, D.; Wu, Q.; Ortland, D.; Gell, D.A.; Marshall, A.R.; Edwin, W., Jr.; et al. Operational performance of the TIMED Doppler interferometer (TIDI). Proc. SPIE 2003, 5157, 47–51. [Google Scholar]
- Marr, K.D.; Thayer, A.S.; Englert, C.R.; Harlander, J.M. Determining the thermomechanical image shift for the MIGHTI instrument on the NASA-ICON satellite. Opt. Eng. 2022, 59, 013102. [Google Scholar]
- Shepherd, G. Application of Doppler Michelson imaging to upper atmospheric wind measurement: WINDII and beyond. Appl. Opt. 1996, 35, 2764–2773. [Google Scholar] [CrossRef]
- Engler, C.R.; Harlander, J.M.; Marr, K.D.; Harding, B.J.; Makela, J.J.; Fae, T.; Brown, C.M.; Ratnam, M.V.; Rao, S.V.B.; Immel, T.J. Michelson interferometer for Global High-Resolution Thermospheric Imaging (MIGHTI) on-orbit wind observations: Data analysis and instrument performance. Space Sci. Rev. 2023, 219, 27. [Google Scholar] [CrossRef]
- Englert, C.R.; Babcock, D.D.; Harlander, J.M. Doppler Asymmetric Spatial Heterodyne Spectroscopy (DASH): An innovative concept for measuring winds in planetary atmospheres. SPIE Proc. 2006, 6303, 272–279. [Google Scholar] [CrossRef]
- Olyaee, S.; Nejad, S.M. Nonlinearity and frequency-path modeling of three-longitudinal-mode nanometric displacement measurement system. IET Optoeletron. 2007, 1, 211–220. [Google Scholar] [CrossRef]
- Killeen, T.L.; Fuller-Rowel, T.L.; Lyons, A.; Killeen, T.L.; Hays, P.B. Stable and rugged etalon for the Dynamics Explore Fabry-Perot interferometer 1: Design and construction. Appl. Opt. 1982, 21, 3896–3902. [Google Scholar] [CrossRef]
- Li, X.; Yuan, Y.; Zhao, J. Microstress installation and experiment result of the interferometer. Acta Photonica Sin. 2007, 36, 918–921. [Google Scholar]
- Englert, C.R. Compression Assembly of Spatial Heterodyne Spectrometer (SHS). US Patent 0.7535572, 19 May 2009. [Google Scholar]
- Harlander, J.M.; Englert, C.R.; Babcock, D.D.; Roesler, F.L. Design and laboratory tests of a Doppler Asymmetric Spatial Heterodyne (DASH) interferometer for upper atmospheric wind and temperature observations. Opt. Express 2010, 18, 26430–26440. [Google Scholar] [CrossRef] [PubMed]
- Bai, Y.; Sun, J.; Hao, X.; Wu, J.; Bai, Q.; Feng, Y. Design of stable satellite-borne Doppler asymmetric spatial heterodyne interferometer support structure. Acta Photon. Sin. 2018, 47, 2–8. [Google Scholar]
- Reutlinger, A. Glue test results for high-precision large cryogenic lens holder. SPIE Proc. 2012, 8450, 756–767. [Google Scholar] [CrossRef]
- Hu, R.; Liu, S.; Li, Q. Topology-optimization-based design method of flexures for mounting the primary mirror of a large-aperture space telescope. Appl. Opt. 2017, 56, 4551–4560. [Google Scholar] [CrossRef]
- Yuan, L.; Xie, J.; He, Z.; Wang, Y.; Wang, J. Optical design and evaluation of airborne prism-grating imaging spectrometer. Opt. Express 2019, 27, 17686–17700. [Google Scholar] [CrossRef]
- Glier, M.; Mezger, A.; Bogner, S.; Erhard, M.; Altbauer, A. High precision assembling process and optomechanical characterization of the optical subassemblies for the EMAP hyper spectral imager instrument. SPIE Proc. 2017, 10562, 1056224. [Google Scholar]
- Zhang, W.; Liu, Z.; Wang, H.; Chen, Y.; Wang, Y.; Zhao, Z.; Sun, T. Research status of spatial Heterodyne spectroscopy-A review. Microchem. J. 2021, 166, 106228. [Google Scholar] [CrossRef]
- Zhang, Y.; Feng, Y.; Fu, D.; Wang, P.; Sun, J.; Bai, Q. Dependence of interferogram phase on incident wavenumber and phase stability of Doppler asymmetric spatial heterodyne spectroscopy. Chin. Phys. B. 2020, 29, 298–303. [Google Scholar] [CrossRef]
- Chang, C.; Fu, D.; Zhao, H.; Hao, X.; Li, J.; Wang, P.; Sun, J.; Feng, X.; Kong, L.; Feng, Y. Research on thermal stability of monolithic near-infrared Doppler asymmetric spatial heterodyne interferometer. Opt. Eng. 2023, 62, 015104. [Google Scholar] [CrossRef]
- Wei, D.; Zhu, Y.; Liu, J.; Gong, Q.; Kaufmann, M.; Olschewski, F.; Knieling, P.; Xu, J.; Koppmann, R.; Riese, M. Thermal stable monolithic Doppler asymmetric spatial heterodyne interferometer: Optical design and laboratory performance. Opt. Express 2020, 48, 19887–19900. [Google Scholar] [CrossRef] [PubMed]
- Englert, C.R.; Brown, C.M.; Bach, B.; Bach, E.; Bach, K.; Harlander, J.M.; Seely, J.F.; Marr, K.D.; Miller, I. High-efficiency echelle gratings for MIGHTI, the spatial heterodyne interferometers for ICON mission. Appl. Opt. 2017, 56, 2090–2098. [Google Scholar] [CrossRef] [PubMed]
- Yoder, P.R. Opto-Mechanical Systems Design, 4th ed.; China Machine Press: Beijing, China, 2008; p. 408. [Google Scholar]
- Yang, S.; Tao, W. Heat Transfer, 4th ed.; Higher Education: Beijing, China, 2016; p. 14. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structure | Advantage | Limitation |
|---|---|---|
| Mounting an FPI with six epoxy pads | Micro-stress mounting with low heat conduction | Mounting an interferometer with a rotationally symmetric structure |
| Mesh bonding surface for mounting the Sagnac interferometer prism | Micro-stress mounting | Larger bonding area |
| Three loaded plungers and precision spacers for mounting split SHS | Thermally stable mounting | Used in lab instrument |
| Combination of four bonding surfaces for mounting DASH | Stable mounting by improving natural frequency | Used in mounting a normal-sized DASH interferometer |
| Side adhesive structure | Support large optical components | Used to support large transmission and reflection prisms |
| Proposed flexible structure | Micro-stress mounting structure with low heat conduction to support a large-sized interferometer | - |
| Element | Material | Design Parameters | Value |
|---|---|---|---|
| Beam Splitter (BS1 and BS2) | Fused silica | Size | 60 × 60 × 50 mm |
| Wedged Spacer (S1) | Fused silica | Thickness at center | 4.73 mm |
| Wedged Spacer (S2) | CaF2 | Thickness at center | 15.66 mm |
| Prisms (P1) | N-SF57 | Wedge angle Thickness at center | 7.84° 10.14 mm |
| Prisms (P2) | N-SF57 | Wedge angle Thickness at center | 7.84° 29.72 mm |
| Parallel Spacers (PPS) | Fused silica | Thickness at center | 6 mm |
| Grating (G1 and G2) | Fused silica | Groove density Blaze angle | 400 gr/mm 10° |
| Parameter | Value |
|---|---|
| KTX | 17,527 N/mm |
| KTY | 18,322 N/mm |
| KTZ | 40,050 N/mm |
| fy | 666.65 Hz |
| fy | 681.61 Hz |
| fz | 1007.72 Hz |
| Element | Density/kg·m−3 | Young’s Modulus/GPa | Poisson’s Ratio |
|---|---|---|---|
| TC4 | 4400 | 109 | 0.28 |
| Invar | 8100 | 145 | 0.25 |
| Fused silica | 2200 | 73.1 | 0.2 |
| CaF2 | 3180 | 75.8 | 0.28 |
| N-SF57 | 3500 | 96 | 0.26 |
| Glue | 1 | 14 | 0.2 |
| Direction | Natural Frequencies (Hz) | |
|---|---|---|
| Structural Frame | DASH Interferometer | |
| X | 1066 | 634 |
| Y | 1187 | 686 |
| Z | 2672 | 939 |
| Frequency Range (Hz) | Acceleration Power Spectral Density (g2·Hz−1) |
|---|---|
| 20–190 | 0.00335 |
| 190–500 | 0.015 |
| 500–750 | 0.01125 |
| 750–2000 | 0.0005 |
| Direction | Natural Frequencies (Hz) | Error (δ) | |
|---|---|---|---|
| FEM (S) | Test (T) | ||
| X | 634 | 649.7 | 2.4% |
| Y | 686 | 669.8 | 2.4% |
| Z | 942 | 979.2 | 3.8% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, J.; Wang, W.; Chang, C.; Fu, D.; Hao, X.; Li, J.; Feng, Y.; Hu, B. Design and Analysis of a Stable Support Structure for a Near-Infrared Space-Borne Doppler Asymmetric Spatial Heterodyne Interferometer. Appl. Sci. 2023, 13, 10446. https://doi.org/10.3390/app131810446
Sun J, Wang W, Chang C, Fu D, Hao X, Li J, Feng Y, Hu B. Design and Analysis of a Stable Support Structure for a Near-Infrared Space-Borne Doppler Asymmetric Spatial Heterodyne Interferometer. Applied Sciences. 2023; 13(18):10446. https://doi.org/10.3390/app131810446
Chicago/Turabian StyleSun, Jian, Wei Wang, Chenguang Chang, Di Fu, Xiongbo Hao, Juan Li, Yutao Feng, and Bingliang Hu. 2023. "Design and Analysis of a Stable Support Structure for a Near-Infrared Space-Borne Doppler Asymmetric Spatial Heterodyne Interferometer" Applied Sciences 13, no. 18: 10446. https://doi.org/10.3390/app131810446