Design and Analysis of a New Semiactive Hydraulic Mount for a Wide-Range Tunable Damping without Magneto-Rheological/Electric-Rheological Fluid


Abstract
:1. Introduction
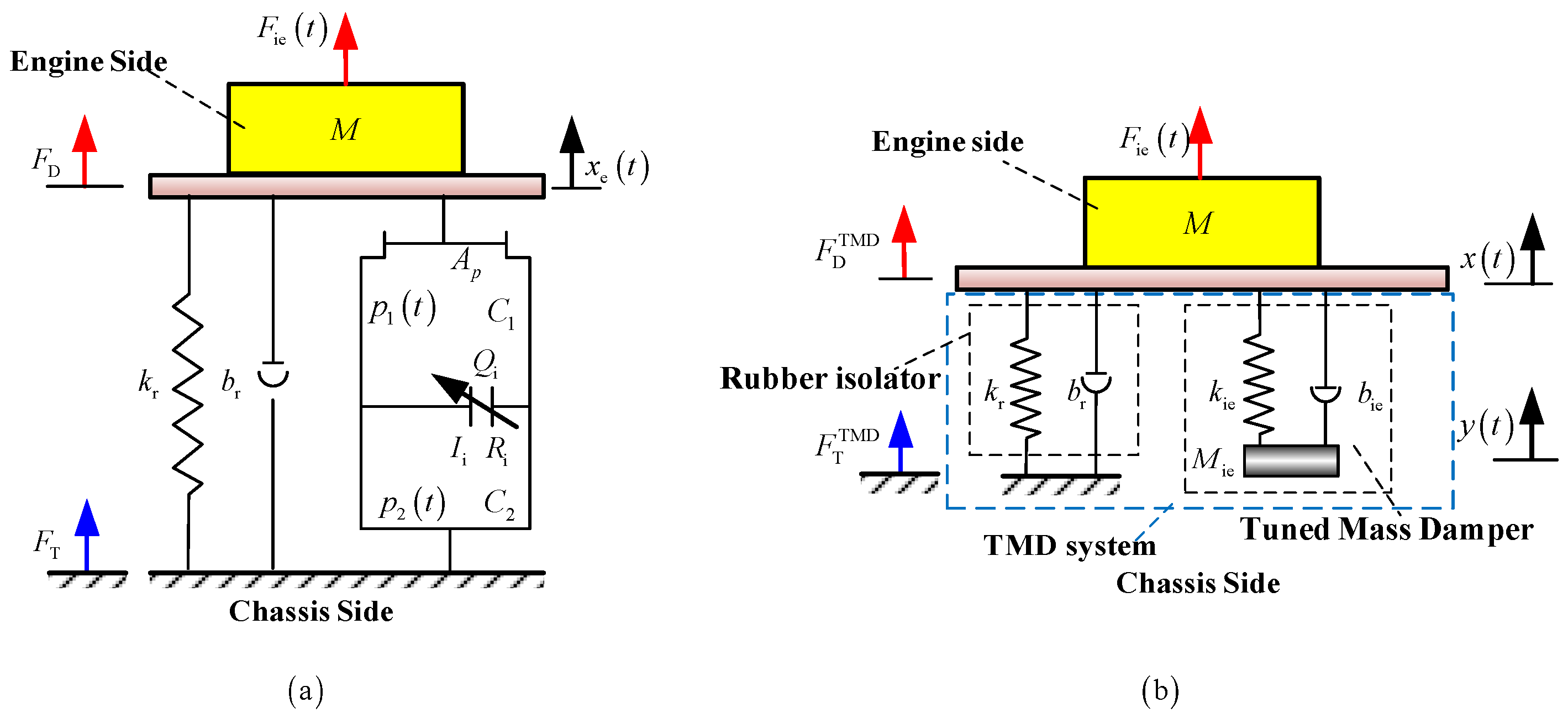
2. Linear LPM of the HEM
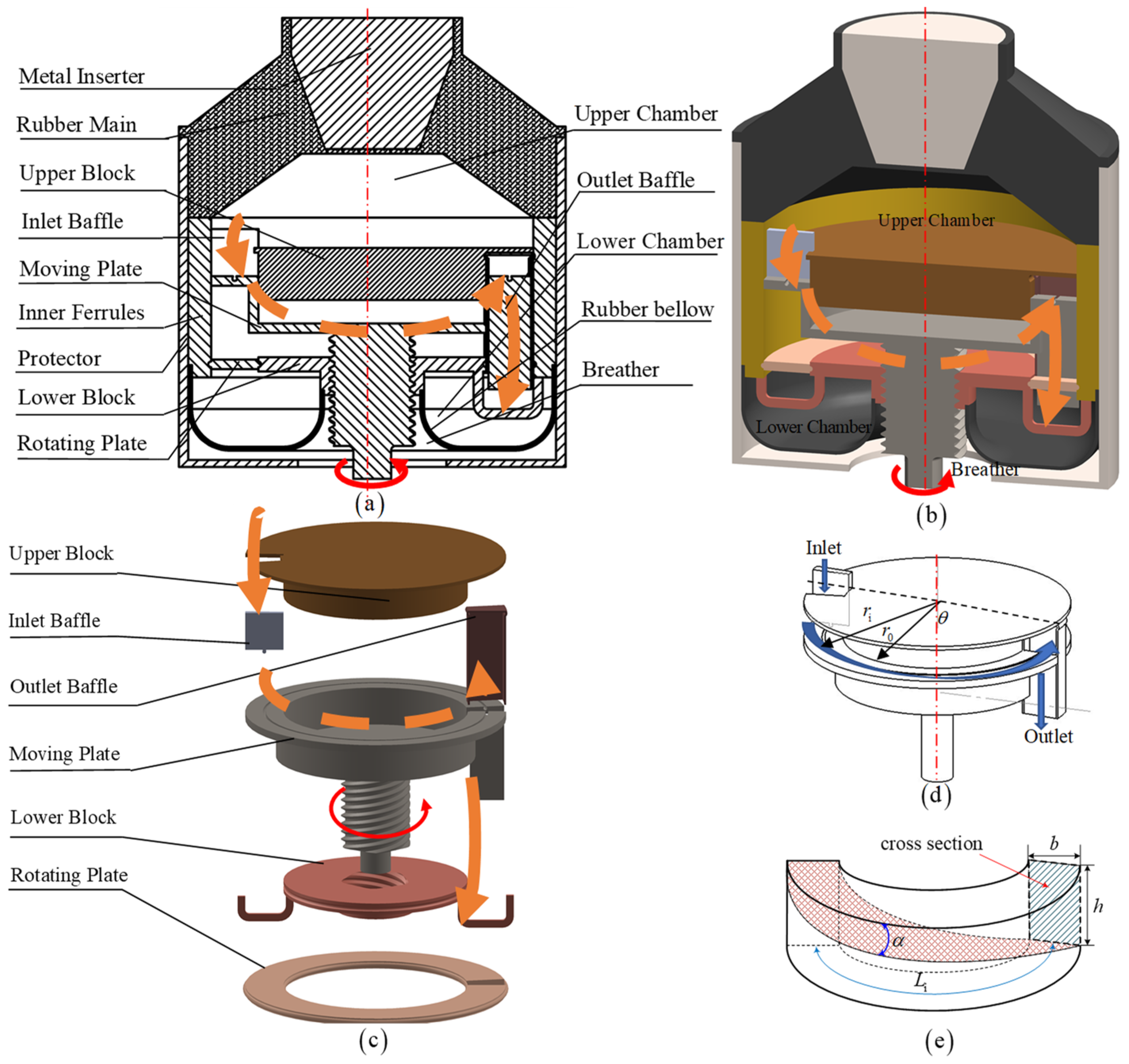
3. Design of a New Semiactive HEM Tuning Only the Damping without MR/ER Fluid
- (1)
- Relationship between the cross-section area and the length of the inertia track
- (2)
- Assembly requirement
- (3)
- Control the inertia area
4. Dynamic Performance of the New Semiactive HEM
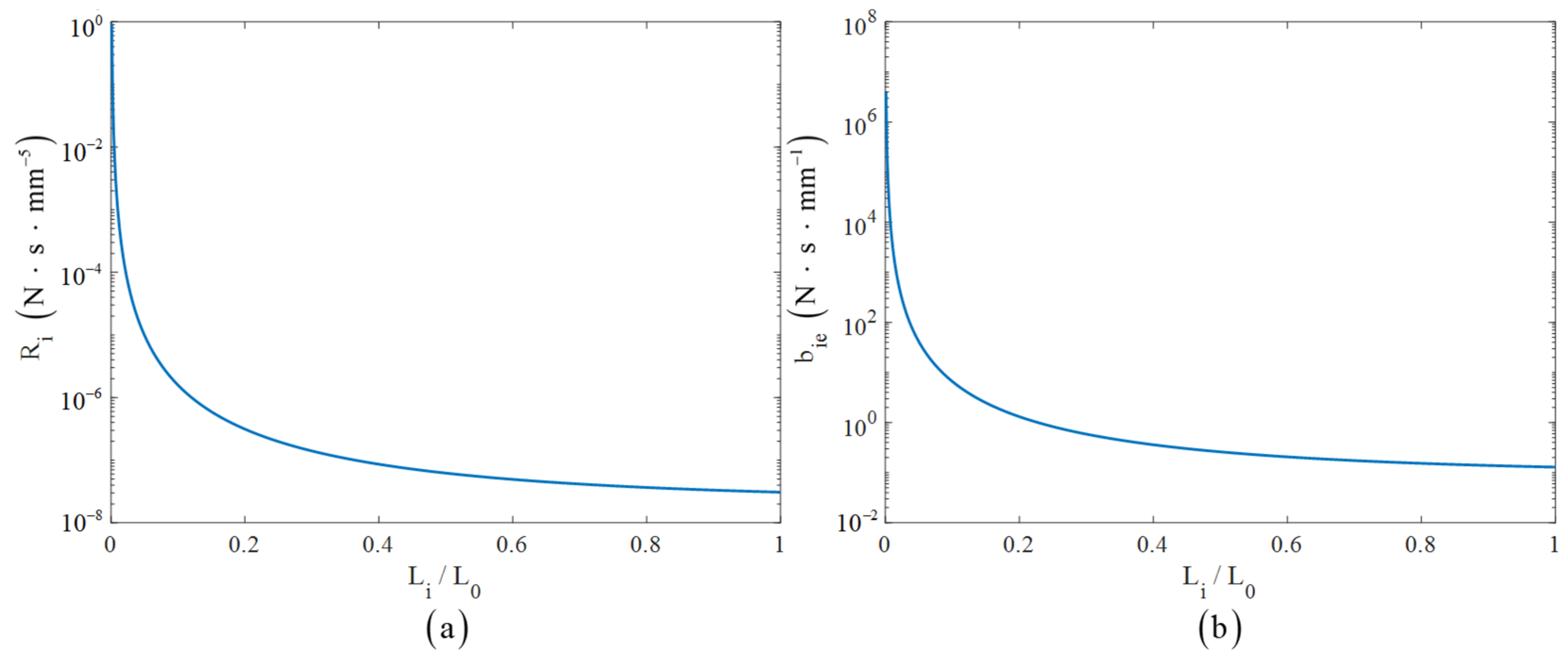
4.1. Lumped Parameters
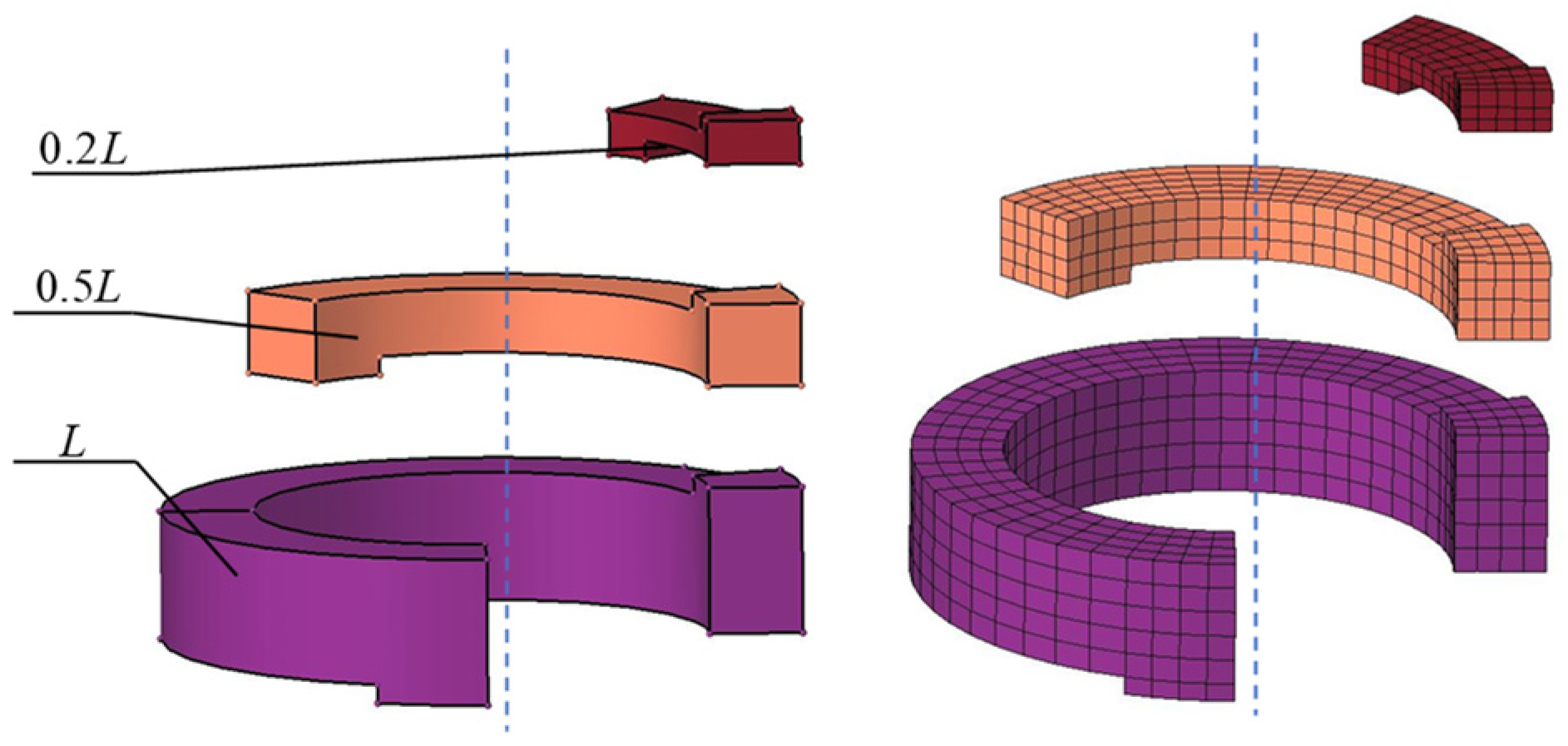
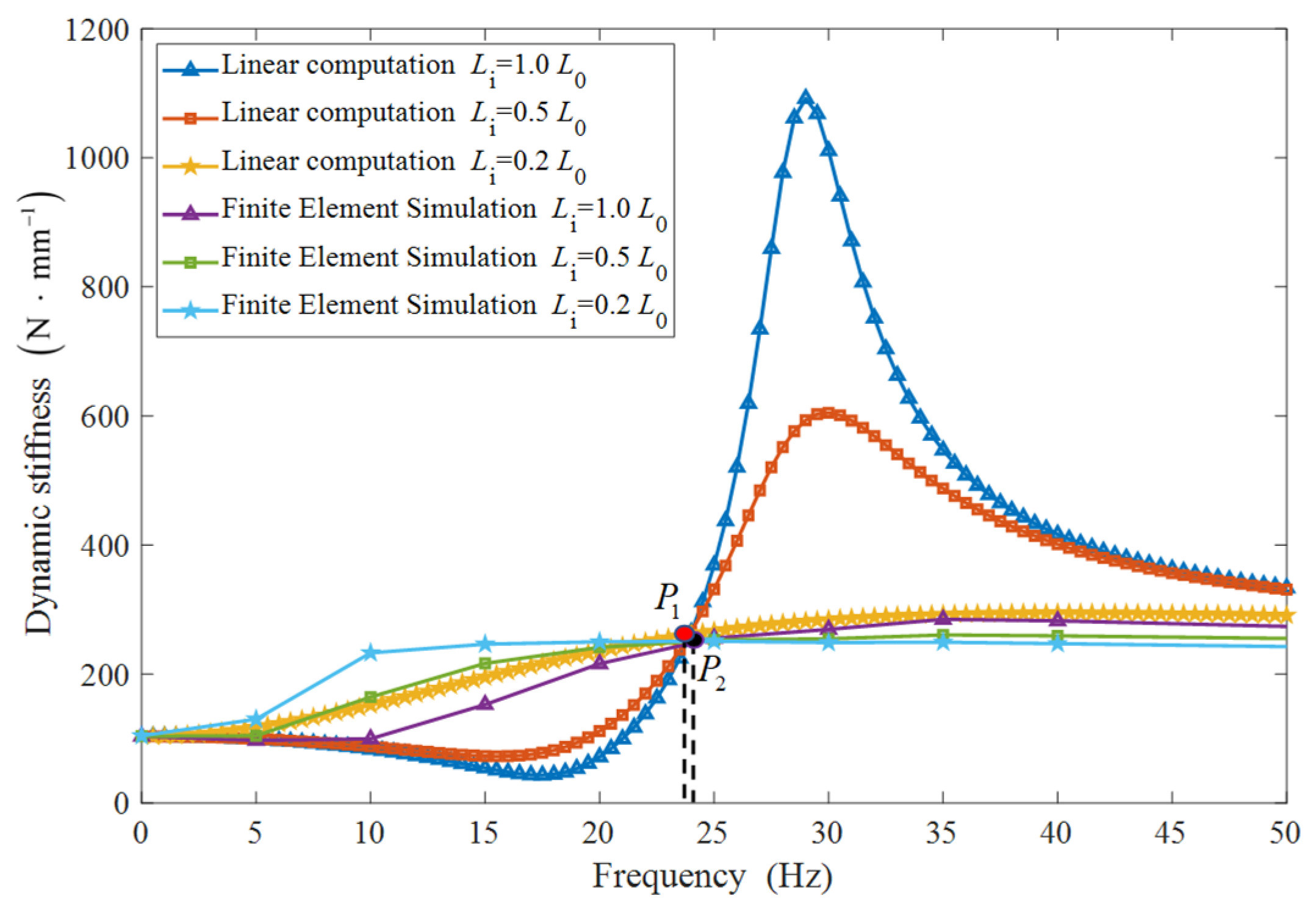
4.2. Simulation Validation Using the Finite Element Method
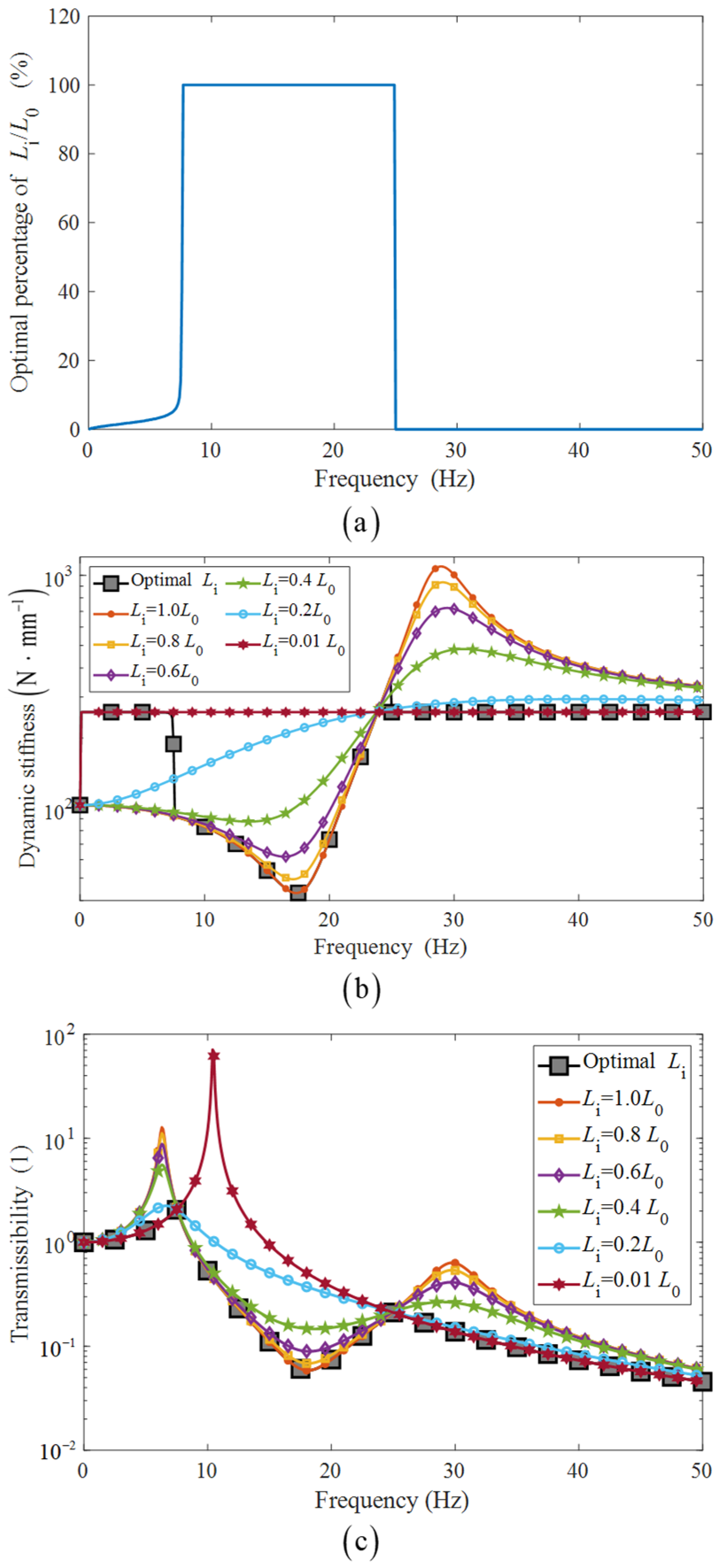
4.3. Vibration Isolation Performance of the Newly Designed HEM
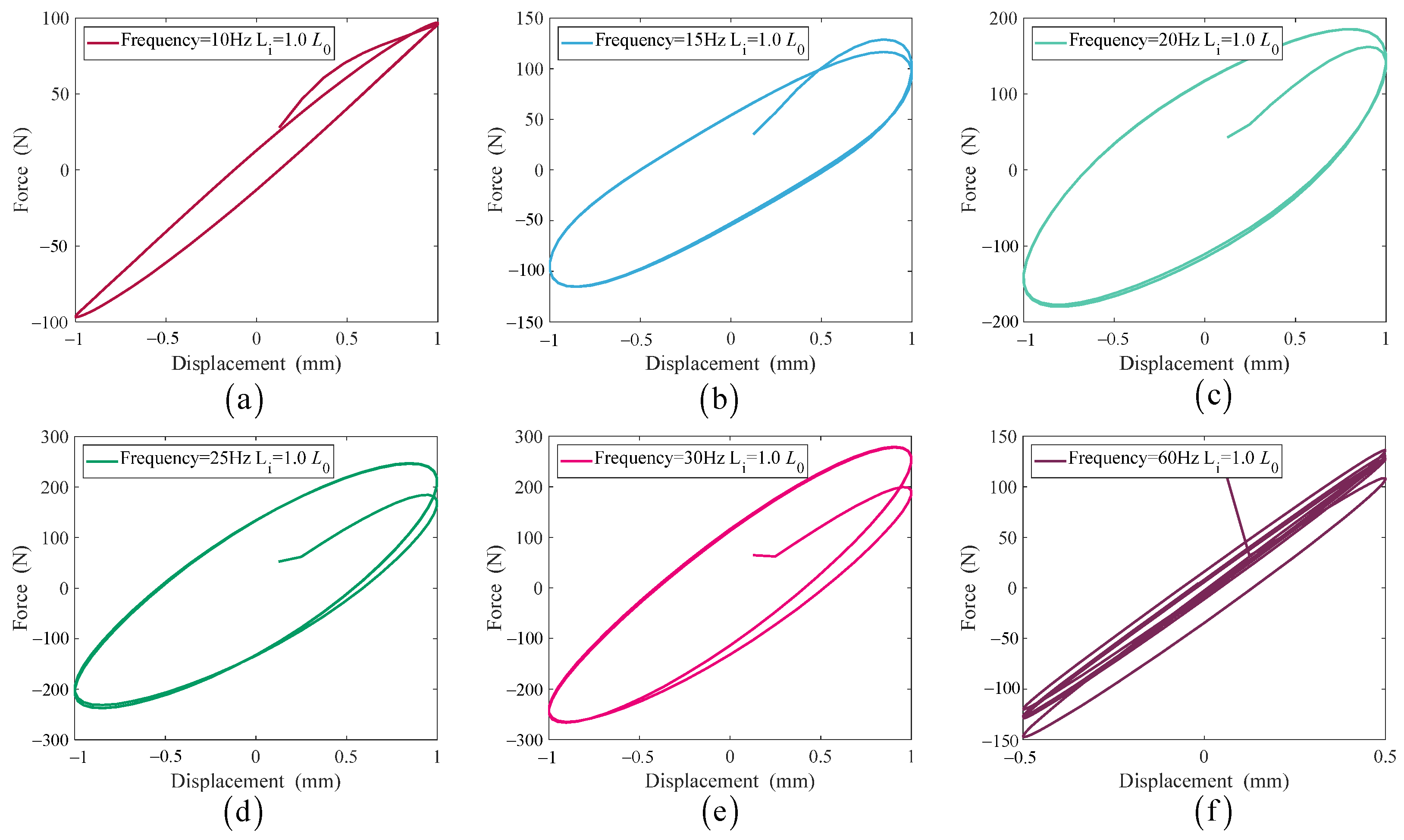
5. Nonlinear Modeling and Dynamic Stiffness Comparison of the Newly Designed HEM and MRF Mount
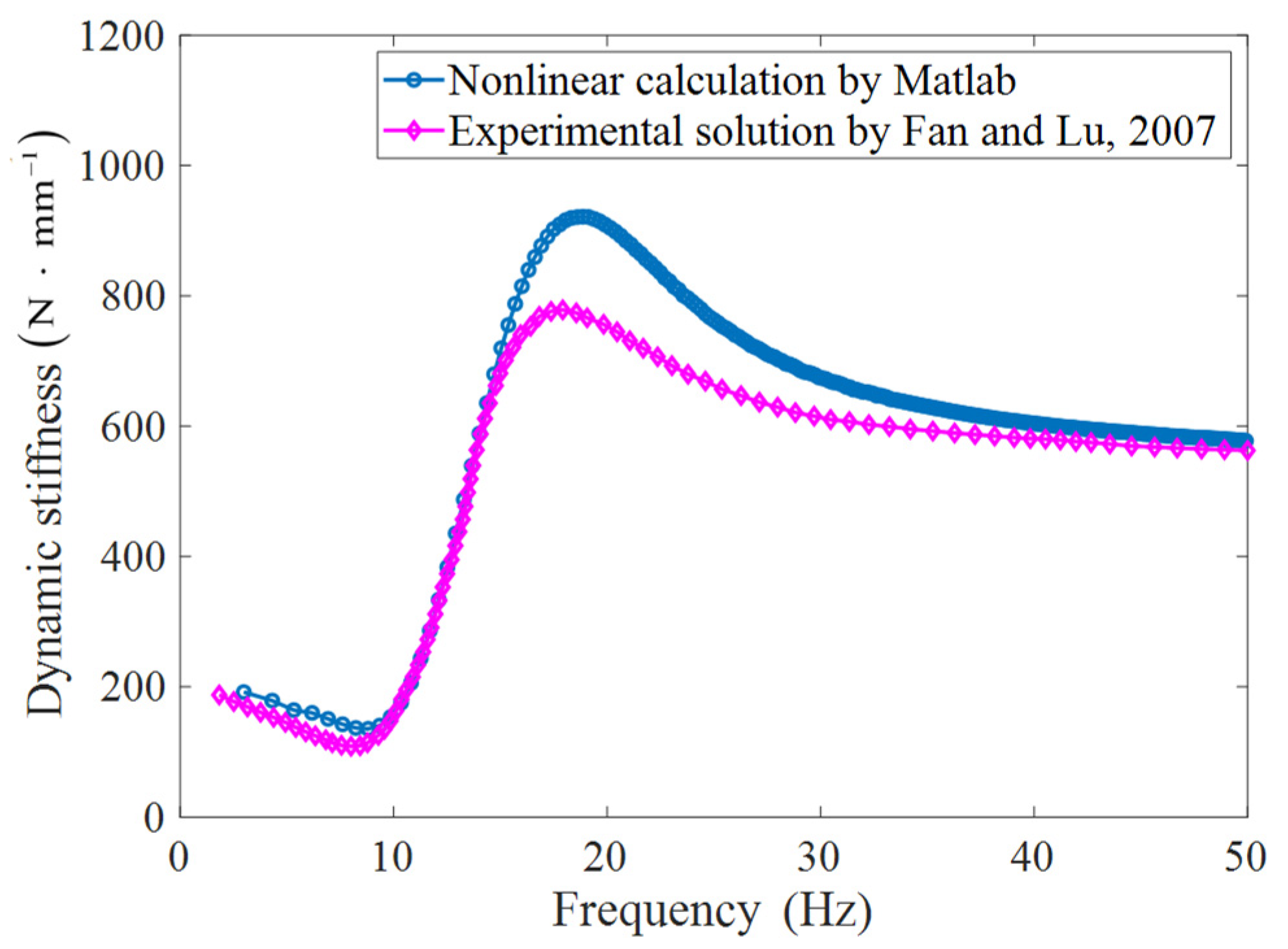
5.1. Parameter Selection and Verification of the MATLAB Solution Procedure
5.2. Comparison with the MR Fluid HEM

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Units |
|---|---|---|
| 11.6 | ||
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| equivalent piston area of main rubber () | |
| cross-sectional area of inertia track () | |
| width of the inertia track () | |
| damping of the main rubber () | |
| equivalent damping of TMD () | |
| coefficient that depends on the flow velocity profile | |
| compliance in the upper chamber () | |
| compliance in the lower chamber () | |
| equivalent parameter of TMD | |
| constant depending on the carrier oil type | |
| hydraulic diameter of the inertia track () | |
| , | driving point force on the engine side () |
| force transmitted to the body side () | |
| force transferred to the body side by the rubber isolator with TMD () | |
| force applied to the engine by the rubber isolator with TMD () | |
| force applied to the engine () | |
| gap of MRF () | |
| magnetic field intensity () | |
| inertia of the inertia track () | |
| drive point dynamic stiffness () | |
| drive point dynamic stiffness of the rubber isolator with TMD () | |
| equivalent stiffness of TMD () | |
| transfer dynamic stiffness () | |
| transfer dynamic stiffness of the rubber isolator with TMD () | |
| bulk stiffness of lower chamber () | |
| stiffness of the main rubber () | |
| bulk stiffness of upper chamber () | |
| effective area ratio due to magnetic field | |
| length of inertia track () | |
| mass at engine side () | |
| equivalent mass of TMD () | |
| wetted perimeter of the inertia track () | |
| pressure of upper fluid chamber () | |
| pressure of lower fluid chamber () | |
| equivalent parameter of TMD | |
| flow rate of the inertia track () | |
| radius of the inertia track’s neutral line () | |
| resistance in the inertia track () | |
| resistance in the inertia track of the nonlinear LPM () | |
| Laplace operator | |
| transmissibility | |
| hyperbolic tangent function | |
| , | displacement of the engine side of the rubber isolator with TMD () |
| , | displacement of the engine side () |
| displacement of the TMD mass side () | |
| fixed point on frequency–dynamic stiffness | |
| energy loss along the inertia track caused by the viscosity of the liquid () | |
| local energy loss due to the sudden change in the cross-section of the fluid flowing through the inlet and outlet () | |
| pressure drop generated by inertia of fluid flow () | |
| pressure drop caused by the viscosity of the fluid and the pressure drop caused by energy loss due to various reasons when the fluid flows through the inertia tracks () | |
| pressure drop due to the yield stress of fluid () | |
| spiral lift angle of the moving plate | |
| index parameters | |
| fluid kinematic viscosity () | |
| fluid density () | |
| rotation angle of the moving plate | |
| empirical formula for the bending effect resistance factor | |
| local factor for the sudden contraction of the cross-section | |
| local factor for the sudden expansion of the cross-section | |
| iron volume fraction | |
| HEM | hydraulic engine mount |
| LPM | lumped parameter model |
| MR | magneto-rheological |
| ER | electric-rheological |
| subscript | parameters with subscript are the parameters of the MRF mount |
References
- Yu, Y.H.; Naganathan, N.G.; Dukkipati, R.V. A literature review of automotive vehicle engine mounting systems. Mech. Mach. Theory 2001, 36, 123–142. [Google Scholar] [CrossRef]
- Wang, M.; Yao, G.F.; Zhao, J.Z.; Qin, M. A novel design of semi-active hydraulic mount with wide-band tunable notch frequency. J. Sound Vib. 2014, 333, 2196–2211. [Google Scholar] [CrossRef]
- Hu, J.; Zhu, D.; Chen, J.; Li, W. Refined response axis decoupling axiom for a coupled vibrating system with spectrally-varying mount properties. J. Vib. Control 2017, 24, 3233–3248. [Google Scholar] [CrossRef]
- Qin, W.; Shangguan, W.-B.; Luo, G.; Xie, Z. A method for estimating mount isolations of powertrain mounting systems. J. Sound Vib. 2018, 426, 278–295. [Google Scholar] [CrossRef]
- Singh, R.; Kim, G.; Ravindra, P.V. Linear analysis of automotive hydro-mechanical mount with emphasis on decoupler characteristics. J. Sound Vib. 1992, 158, 219–243. [Google Scholar] [CrossRef]
- Kim, G.; Singh, R. A study of passive and adaptive hydraulic engine mount systems with emphasis on non-linear characteristics. J. Sound Vib. 1995, 179, 427–453. [Google Scholar] [CrossRef]
- Jazar, G.N.; Golnaraghi, M.F. Nonlinear modeling, experimental verification, and theoretical analysis of a hydraulic engine mount. J. Vib. Control 2002, 8, 87–116. [Google Scholar] [CrossRef]
- Shangguan, W.B.; Lu, Z.H. Experimental study and simulation of a hydraulic engine mount with fully coupled fluid–structure interaction finite element analysis model. Comput. Struct. 2004, 82, 1751–1771. [Google Scholar] [CrossRef]
- Stosiak, M.; Karpenko, M.; Prentkovskis, O.; Deptuła, A.; Skačkauskas, P. Research of vibrations effect on hydraulic valves in military vehicles. Def. Technol. 2023. [Google Scholar] [CrossRef]
- Liang, T.Y.; Liang, T.Y.; Shi, W.K. Study on electromagnetic actuator active engine mount with fuzzy control. In Proceedings of the 2009 IEEE International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009; Volume 1–7, pp. 3010–3014. [Google Scholar] [CrossRef]
- Mansour, H.; Arzanpour, S.; Golnaraghi, F. Design of a solenoid valve based active engine mount. J. Vib. Control 2011, 18, 1221–1232. [Google Scholar] [CrossRef]
- Foumani, M.S.; Khajepour, A.; Durali, M. Application of Shape Memory Alloys to a New Adaptive Hydraulic Mount. In International Body Engineering Conference & Exhibition and Automotive & Transportation Technology Congress; SAE Technical Paper; SAE: Warrendale, PA, USA, 2002. [Google Scholar] [CrossRef]
- Foumani, M.S.; Khajepour, A.; Durali, M. A new high-performance adaptive engine mount. J. Vib. Control 2004, 10, 39–54. [Google Scholar] [CrossRef]
- Truong, T.Q.; Ahn, K.K. A new type of semi-active hydraulic engine mount using controllable area of inertia track. J. Sound Vib. 2010, 329, 247–260. [Google Scholar] [CrossRef]
- Vahdati, N.; Heidari, S. A novel semi-active fluid mount using a multi-layer piezoelectric beam. J. Vib. Control 2010, 16, 2215–2234. [Google Scholar] [CrossRef]
- Elahinia, M.; Ciocanel, C.; Nguyen, T.M.; Wang, S. Mr- and er-based semiactive engine mounts: A review. Smart Mater. Res. 2013, 2013, 831017. [Google Scholar] [CrossRef]
- Arzanpour, S.; Golnaraghi, M.F. A novel semi-active magnetorheological bushing design for variable displacement engines. J. Intell. Mater. Syst. Struct. 2008, 19, 989–1003. [Google Scholar] [CrossRef]
- Tikani, R.; Vahdati, N.; Ziaei-Rad, S. Two-mode operation engine mount design for automotive applications. Shock Vib. 2012, 19, 1267–1280. [Google Scholar] [CrossRef]
- Mansour, H.; Arzanpour, S.; Golnaraghi, M.F.; Parameswaran, A.M. Semi-active engine mount design using auxiliary magneto-rheological fluid compliance chamber. Veh. Syst. Dyn. 2010, 49, 449–462. [Google Scholar] [CrossRef]
- Farjoud, A.; Taylor, R.; Schumann, E.; Schlangen, T. Advanced semi-active engine and transmission mounts: Tools for modelling, analysis, design, and tuning. Veh. Syst. Dyn. 2014, 52, 218–243. [Google Scholar] [CrossRef]
- Chen, P.; Bai, X.X.; Qian, L.J.; Choi, S.B. A magneto-rheological fluid mount featuring squeeze mode: Analysis and testing. Smart Mater. Struct. 2016, 25, 055002. [Google Scholar] [CrossRef]
- Yang, S.Y.; Han, C.; Shin, S.U.; Choi, S.B. Design and evaluation of a semi-active magneto-rheological mount for a wheel loader cabin. Actuators 2017, 6, 16. [Google Scholar] [CrossRef]
- Hong, S.R.; Choi, S.B.; Jung, W.J.; Jeong, W.B. Vibration isolation of structural systems using squeeze mode er mounts. J. Intell. Mater. Syst. Struct. 2016, 13, 421–424. [Google Scholar] [CrossRef]
- Stanway, R.; Sproston, J.L.; Prendergast, M.J.; Case, J.R.; Wilne, C.E. Er fluids in the squeeze-flow mode: An application to vibration isolation. J. Electrost. 1992, 28, 89–94. [Google Scholar] [CrossRef]
- Choi, S.B.; Song, H.E. Vibration control of a passenger vehicle utilizing a semi-active er engine mount. Veh. Syst. Dyn. 2002, 37, 193–216. [Google Scholar] [CrossRef]
- Fan, R.; Lu, Z. Fixed points on the nonlinear dynamic properties of hydraulic engine mounts and parameter identification method: Experiment and theory. J. Sound Vib. 2007, 305, 703–727. [Google Scholar] [CrossRef]
- Peicheng, S.P.S.P.S. Simulation research on hydraulic mount nonlinear dynamic characteristics. China Mech. Eng. 2009, 20, 2545–2548. [Google Scholar] [CrossRef]
- Barber, D.E.; Carlson, J.D. Performance characteristics of prototype mr engine mounts containing glycol mr fluids. J. Intell. Mater. Syst. Struct. 2009, 21, 1509–1516. [Google Scholar] [CrossRef]
- Shiao, Y.; Huynh, T.L. Suspension control and characterization of a variable damping magneto-rheological mount for a micro autonomous railway inspection car. Appl. Sci. 2022, 12, 7336. [Google Scholar] [CrossRef]
- Nguyen, Q.-H.; Han, Y.-M.; Choi, S.-B.; Wereley, N.M. Geometry optimization of mr valves constrained in a specific volume using the finite element method. Smart Mater. Struct. 2007, 16, 2242–2252. [Google Scholar] [CrossRef]
- Türkücü, T.; Keleş, Ö. Magneto-rheological engine mount design and experimental characterization. J. Mech. Sci. Technol. 2018, 32, 5171–5178. [Google Scholar] [CrossRef]
- Fan, R.L.; Fei, Z.; Zhou, B.Y.; Gong, H.B.; Song, P.J. Two-step dynamics of a semiactive hydraulic engine mount with four-chamber and three-fluid-channel. J. Sound Vib. 2020, 480, 115403. [Google Scholar] [CrossRef]
- Quoc, N.V.; Tuan, L.D.; Hiep, L.D.; Quoc, H.N.; Choi, S.B. Material characterization of mr fluid on performance of mrf based brake. Front. Mater. 2019, 6, 125. [Google Scholar] [CrossRef]




| Parameters | Values | Units |
|---|---|---|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Y.-C.; Yao, G.-F.; Wang, M.; Yu, H.; Gao, K.-Y.; Zhou, P.-L. Design and Analysis of a New Semiactive Hydraulic Mount for a Wide-Range Tunable Damping without Magneto-Rheological/Electric-Rheological Fluid. Appl. Sci. 2023, 13, 10636. https://doi.org/10.3390/app131910636
Zhu Y-C, Yao G-F, Wang M, Yu H, Gao K-Y, Zhou P-L. Design and Analysis of a New Semiactive Hydraulic Mount for a Wide-Range Tunable Damping without Magneto-Rheological/Electric-Rheological Fluid. Applied Sciences. 2023; 13(19):10636. https://doi.org/10.3390/app131910636
Chicago/Turabian StyleZhu, Yuan-Cheng, Guo-Feng Yao, Min Wang, Hang Yu, Kui-Yang Gao, and Pei-Lei Zhou. 2023. "Design and Analysis of a New Semiactive Hydraulic Mount for a Wide-Range Tunable Damping without Magneto-Rheological/Electric-Rheological Fluid" Applied Sciences 13, no. 19: 10636. https://doi.org/10.3390/app131910636