

Invariant Feature Encoding for Contact Handprints Using Delaunay Triangulated Graph

Abstract
:1. Introduction
- Introducing the algorithm based on new variant of graph matching with triangles using invariant feature representation.
- Evaluating the algorithm using fingerprints with geometrical variations and investigating palm prints with geometrical variation, partial-quality, and extremely degraded impressions that resemble latent prints.
- Comparing the method with the state-of-the-art scale-invariant feature transform (SIFT) features.
2. Related Work
2.1. Fingerprint
2.2. Palm Prints
2.2.1. Match between Full Palm Prints
2.2.2. Match between Partial vs. Full Palm Prints
2.2.3. Latent Prints
- Defining a feature vector to show invariant properties. To eliminate scale and rotation variations of matching images, the feature vector consists of triangle features except the length of the triangle. This can help to tolerate scale and small angle changes due to the spurious minutiae (when forming triangles).
- Introducing the graph-based Delaunay triangulation match, where all triangles in an image are compared with the triangles in a counter image, and the triangles are allowed to grow further by adding more nodes/minutiae to a certain extent.
- If we perform only triangle-to-triangle matches, then there is a possibility of having one triangle match with many false triangles at several locations in the counter image. To systematically check the true match, an additional validation process of the previously matched triangle-based graphs is introduced. The probability of a sub-graph (formed from the matched triangles) matching with false sub-graphs in the counter image due to the false minutiae would be comparatively lower than the triangle match. This eliminates spurious minutiae-related graphs in the larger hand surface area, and then the validated graphs are merged.
3. Proposed Method
- Invariant feature representation—a feature vector of a triangle is proposed to tolerate scale and rotation variations of images (distance of a triangle side or ridge count are eliminated in feature vector).
- Geometrical alignment—image alignment is achieved using initial triangle matching and the matched triangles are used as reference locations. This process helps to automatically align the images.
- Computational complexity in processing a larger surface area—Delaunay triangulation is used to lower the computational complexity of the minutiae-based triangles in an increased hand size with a large number of spurious minutiae.
- Elimination of spurious minutiae—this is achieved by verification of independent matched triangles and validation of sub-graphs. Since spurious minutiae can generate false triangles on handprints, we can discard some of the sub-graphs formed from the false triangle match after validity checking. The sub-graphs are validated based on the number of minutiae each graph holds (threshold).
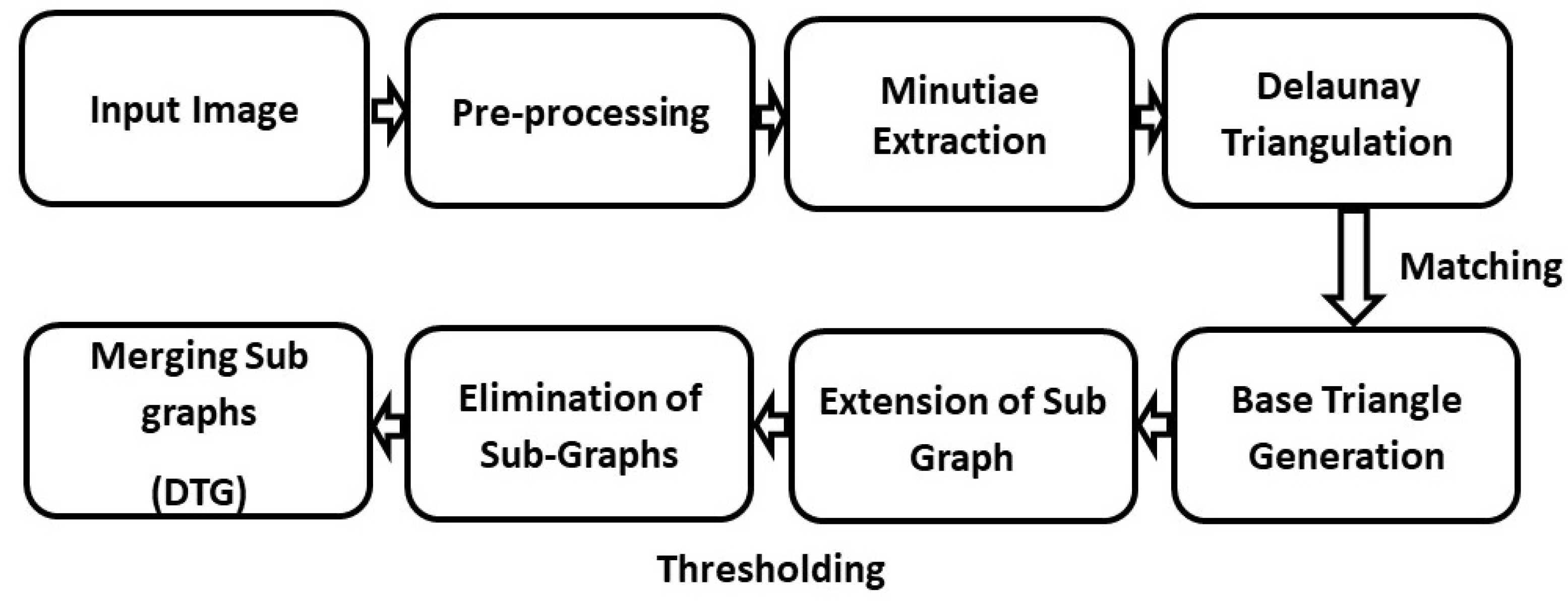
3.1. Delaunay-Triangle-Graph (DTG) Algorithm
3.1.1. Base-Triangle Generation
- p, q and r—minutiae right to left order;
- —triangle angle;
- t—minutiae type;
- o—orientation of a minutiae from right to left;
- od—orientation difference between adjacent minutiae.
3.1.2. Extension of Sub-Graph
- Task A—Computation of orientation and distance information between the pair of base-triangles.
- —orientation of nth minutiae in the first base triplet in template (n = 1, 2, 3).
- —orientation of mth minutiae in the second base triplet in template (m = 1, 2, 3).
- —orientation of nth minutiae in the first base triplet in query image.
- —orientation of mth minutiae in the second base triplet in query image.
- Task B—Computation of distance ratio and orientation difference between template and probe.
- Iteration of Tasks A and B
- Iteration of Tasks A, B, and C
3.1.3. Elimination of Sub-Graphs
3.1.4. Merging of Sub Graphs
3.2. Data Set
- Fingerprints without geometrical variations (without rotational changes). Fingerprints from 35 users –> 2–4 images from each users were used.
- Fingerprints with geometrical variations (with rotation and scale changes). Fingerprint images from 67 users were used for this evaluation.
4. Experiments
4.1. Pre-Processing
4.2. Feature Extraction
- Binarization
- Thinning
- Feature-point localization
- Delaunay triangulation
4.2.1. Matching
4.2.2. Score Computation
5. Results
5.1. Handprint Segments from Finger Region
5.2. Handprint Segments from Palm Region
- Experiment using partial degraded images with geometrical variations.
- Experiment using extremely degraded images with geometrical variations.
5.2.1. Experiment Using Partial Degraded Images with Geometrical Variations
5.2.2. Experiment Using Extremely Degraded Images with Geometrical Variations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Akmal-Jahan, M.; Banks, J.; Tomeo-Reyes, I.; Chandran, V. Contactless Finger Recognition Using Invariants from Higher Order Spectra of Ridge Orientation Profiles. In Proceedings of the 2018 25th IEEE International Conference on Image Processing (ICIP), Athens, Greece, 7–10 October 2018; pp. 2012–2016. [Google Scholar]
- Chauhan, A. Latent Palm Prints—An Appraisal of Concealed Individualize Evidence and Its Aspect in Forensic Investigation. J. Forensic Sci. Crim. Investig. 2017, 6, 555696. [Google Scholar] [CrossRef]
- Akmal-Jahan, M.A.C.; Kien, N.T.; Jasmine, B. HOS-finger code: Bispectral invariants based contactless multi-finger recognition system using ridge orientation and feature fusion. Expert Syst. Appl. 2022, 201, 117054. [Google Scholar]
- Rzecki, K. Classification Algorithm for Person Identification and Gesture Recognition Based on Hand Gestures with Small Training Sets. Sensors 2020, 20, 7279. [Google Scholar] [CrossRef] [PubMed]
- Chyad, H.S.; Mustafa, R.A.; Saleh, K.T. Hand Print Recognition System Based on FP-Growth Algorithm. Webology 2022, 19, 980–1000. [Google Scholar] [CrossRef]
- Akmal-Jahan, M.A.C.; Nguyen, K.; Banks, J.; Chandran, V. Contactless Multiple Finger Segments Based Identity Verification Using Information Fusion from Higher Order Spectral Invariants. In Proceedings of the 15th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Madrid, Spain, 29 November–2 December 2018. [Google Scholar]
- Akmal-Jahan, M.A.C.; Banks, J.; Thanh, K.N.; Chandran, V. Rotation and Scale Invariant Bispectral Feature Based Recognition of Contactless Palmprints. In Proceedings of the 2019 International Conference on Image and Vision Computing New Zealand (IVCNZ), Dunedin, New Zealand, 2–4 December 2019; pp. 1–7. [Google Scholar]
- Rodrigues, R.M.; Filho, C.F.F.C.; Costa, M.G.F. Fingerprint verification using characteristic vector based on planar graphics. In Proceedings of the 2011 IEEE 10th IVMSP Workshop: Perception and Visual Signal Analysis, Ithaca, NY, USA, 16–17 June 2011; pp. 87–92. [Google Scholar]
- Medina-Perez, M.A.; Garcia-Borroto, M.; Rodriguez, A.E.G.; Altamirano-Robles, L. Improving fingerprint verification using minutiae-triplets. Sensors 2012, 12, 3418–3437. [Google Scholar] [CrossRef] [PubMed]
- Deng, H.; Huo, Q. Minutiae matching based fingerprint verification using Delaunay triangulation and aligned-edge-guided triangle matching. In Proceedings of the International Conference on Audio and Video Based Biometric Person Authentication, Rye Brook, NY, USA, 9–11 June 2005; pp. 270–278. [Google Scholar]
- Gupta, P.; Tiwari, K.; Arora, G. Fingerprint indexing schemes—A survey. Neurocomputing 2018, 335, 352–365. [Google Scholar] [CrossRef]
- Socheat, S.; Wang, T. Fingerprint Enhancement, Minutiae Extraction and Matching Techniques. J. Comput. Commun. 2020, 8, 55–74. [Google Scholar] [CrossRef]
- Peralta, D.; Galar, M.; Triguero, I.; Paternain, D. A survey on fingerprint minutiae-based local matching for verification and identification: Taxonomy and experimental evaluation. Inf. Sci. 2015, 3, 67–87. [Google Scholar] [CrossRef]
- Bengueddoudj, A.; Akrouf, S.; Belhadj, F.; Nada, D. Improving fingerprint minutiae matching using local and global structures. In Proceedings of the 8th International Workshop on Systems, Signal Processing and Their Applications (WoSSPA), Algiers, Algeria, 12–15 May 2013; pp. 279–282. [Google Scholar]
- Cao, J.; Feng, J. A robust fingerprint matching algorithm based on compatibility of star structures. In Proceedings of the Sixth International Symposium on Multispectral Image Processing and Pattern Recognition, Yichang, China, 30 October–1 November 2009; Volume 7498. [Google Scholar]
- Ferrara, M.; Cappelli, R.; Maltoni, D. Minutia cylinder-code: A new representation and matching technique for fingerprint recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 2128–2141. [Google Scholar]
- Anandha Jothi, R.; Palanisamy, V.; Nithyapriya, J. Evaluation of fingerprint minutiae on ridge structure using Gabor and closed hull filter. In Computational Vision and Bio Inspired Computing; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Wang, R.; Ramos, D.; Fierrez, J. Latent-to-full palmprint comparison based on radial triangulation under forensic conditions. In Proceedings of the 2011 International Joint Conference on Biometrics (IJCB), Washington, DC, USA, 11–13 October 2011; pp. 1–6. [Google Scholar]
- Anandha Jothi, R.; Nithyapriya, J.; Palanisamy, V. Performance Improvement in Fingerprint Feature Extraction Using Minutiae Local Triangle Feature Set. In Proceedings of the 2019 TEQIP III Sponsored International Conference on Microwave Integrated Circuits, Photonics and Wireless Networks (IMICPW), Tiruchirappalli, India, 22–24 May 2019; pp. 213–218. [Google Scholar] [CrossRef]
- Choi, H.; Choi, K.; Kim, J. Fingerprint matching incorporating ridge features with minutiae. IEEE Trans. Inf. Forensics Secur. 2011, 6, 338–345. [Google Scholar] [CrossRef]
- Fu, X.; Liu, C.; Bian, J.; Feng, J. Spectral correspondence method for fingerprint minutiae matching. In Proceedings of the 21st International Conference on Pattern Recognition (ICPR2012), Tsukuba, Japan, 11–15 November 2012; pp. 1743–1746. [Google Scholar]
- Carreira, L.; Singh, S.; Correia, P.L.; Soares, L.D. Personal identification from degraded and incomplete high-resolution palmprints. IET Biom. 2015, 4, 53–61. [Google Scholar] [CrossRef]
- Xinrong, P.; Yangmeng, T.; Jiaqiang, W. A Survey of Palmprint Feature Extraction Algorithms. In Proceedings of the Fourth International Conference on Intelligent Systems Design and Engineering Applications, Zhangjiajie, China, 6–7 November 2013; pp. 57–63. [Google Scholar]
- Dai, J.; Zhou, J. Multifeature-Based High-Resolution Palmprint Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 945–957. [Google Scholar] [PubMed]
- Feng, J.; Dai, J.; Zhou, J. Robust and efficient ridge-based palmprint matching. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 1618–1632. [Google Scholar]
- Veldhuis, R.; Fierrez, J.; Spreeuwers, L.; Xu, H.; Wang, R.; Ramos, D. Regional fusion for high-resolution palmprint recognition using spectral minutiae representation. IET Biom. 2014, 3, 94–100. [Google Scholar]
- Liu, E.; Jain, A.K.; Tian, J. A coarse to fine minutiae-based latent palmprint matching. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 2307–2322. [Google Scholar] [PubMed]
- Rao, A.T.; Ramaiah, N.P.; Mohan, C.K. Palmprint Recognition Based on Minutiae Quadruplets. In Proceedings of International Conference on Computer Vision and Image Processing; Raman, B., Kumar, S., Roy, P., Sen, D., Eds.; Advances in Intelligent Systems and Computing; Springer: Singapore, 2017; Volume 460. [Google Scholar]
- Yue, W.Z.F.; Zhang, D. ICP registration using principal line and orientation features for palmprint alignment. In Proceedings of the 2010 IEEE International Conference on Image Processing, Hong Kong, 26–29 September 2010; pp. 3069–3072. [Google Scholar]
- Feng, J.; Liu, C.; Wang, H.; Sun, B. High-resolution palmprint minutiae extraction based on Gabor feature. Sci. China Inf. Sci. 2014, 57, 1–15. [Google Scholar] [CrossRef]
- Jia, W.; Hu, R.-X.; Lei, Y.-K.; Zhao, Y.; Gui, J. Histogram of oriented lines for palmprint recognition. IEEE Trans. Syst. Man Cybern. Syst. 2014, 44, 385–395. [Google Scholar] [CrossRef]
- Zhang, D.; Zuo, W.; Yue, F. A comparative study of palmprint recognition algorithms. ACM Comput. Surv. 2012, 44, 2–38. [Google Scholar] [CrossRef]
- Bounneche, M.D.; Boubchir, L.; Bouridane, A.; Nekhoul, B.; Ali-Chérif, A. Multi-spectral palmprint recognition based on oriented multiscale log-Gabor filters. Neurocomputing 2016, 205, 274–286. [Google Scholar] [CrossRef]
- Malik, J.; Girdhar, D.; Dahiya, R. Accuracy improvement in palmprint authentication system. Int. J. Image Graph. Signal Process. 2015, 7, 51–59. [Google Scholar] [CrossRef]
- Zuo, W.; Lin, Z.; Guo, Z.; Zhang, D. The multiscale competitive code via sparse representation for palmprint verification. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 2265–2272. [Google Scholar]
- Jia, W.; Huang, D.-S.; Zhang, D. Palmprint verification based on robust line orientation code. Pattern Recognit. 2008, 41, 1504–1513. [Google Scholar] [CrossRef]
- Fei, L.; Xu, Y.; Tang, W.; Zhang, D. Double-orientation code and nonlinear matching scheme for palmprint recognition. Pattern Recognit. 2016, 49, 89–101. [Google Scholar] [CrossRef]
- Fei, L.; Lu, G.; Jia, W.; Teng, S.; Zhang, D. Feature Extraction Methods for Palmprint Recognition: A Survey and Evaluation. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 346–363. [Google Scholar] [CrossRef]
- Zhao, W.; Pang, L.; Xiao, K.; Wang, H.; Cao, Z.; Zhao, H. Palmprint recognition using a modified competitive code with distinctive extended neighborhood. IET Comput. Vis. 2018, 12, 1151–1162. [Google Scholar] [CrossRef]
- Zhang, K.; Huang, D.; Zhang, D. An optimized palmprint recognition approach based on image sharpness. Pattern Recognit. Lett. 2017, 85, 65–71. [Google Scholar] [CrossRef]
- Song, L.; Huang, H. Revisiting Competitive Coding Approach for Palmprint Recognition: A Linear Discriminant Analysis Perspective. arXiv 2022, arXiv:2206.15349. [Google Scholar]
- Zhao, S.; Fei, L.; Wen, J. Multiview-Learning-Based Generic Palmprint Recognition: A Literature Review. Mathematics 2023, 11, 1261. [Google Scholar] [CrossRef]
- Fei, L.; Zhang, B.; Teng, S.; Guo, Z.; Li, S.; Jia, W. Joint Multiview Feature Learning for Hand-Print Recognition. IEEE Trans. Instrum. Meas. 2020, 69, 9743–9755. [Google Scholar] [CrossRef]
- Amrouni, N.; Benzaoui, A.; Bouaouina, R.; Khaldi, Y.; Adjabi, I.; Bouglimina, O. Contactless Palmprint Recognition Using Binarized Statistical Image Features-Based Multiresolution Analysis. Sensors 2022, 22, 9814. [Google Scholar] [CrossRef]
- Li, S.; Zhang, B. Joint Discriminative Sparse Coding for Robust Hand-Based Multimodal Recognition. IEEE Trans. Inf. Forensics Secur. 2021, 16, 3186–3198. [Google Scholar] [CrossRef]
- Micucci, M.; Iula, A. Recognition Performance Analysis of a Multimodal Biometric System Based on the Fusion of 3D Ultrasound Hand-Geometry and Palmprint. Sensors 2023, 23, 3653. [Google Scholar] [CrossRef] [PubMed]
- Khodadoust, J.; Khodadoust, A.M. Fingerprint indexing based on expanded Delaunay triangulation. Expert Syst. Appl. 2017, 81, 251–267. [Google Scholar] [CrossRef]
- Fei, L.; Teng, S.; Wu, J.; Rida, I. Enhanced Minutiae Extraction for High-Resolution Palmprint Recognition. Int. J. Image Graph. 2017, 17, 1750020. [Google Scholar] [CrossRef]
- Munoz Briseno, A.; Hernandez Palancar, J. A new triangular matching approach for latent palmprint identification. In Proceedings of the 18th Iberoamerican Congress on Pattern Recognition, Havana, Cuba, 20–23 November 2013; pp. 294–301. [Google Scholar]
- Selbes, B.; Elİhoş, A. Deep Learning Based Latent Palmprint Recognition. In Proceedings of the 2023 31st Signal Processing and Communications Applications Conference (SIU), Istanbul, Turkey, 5–8 July 2023; pp. 1–4. [Google Scholar]
- Hernandez-Palancar, J.; Munoz-Briseno, A.; Gago-Alonso, A. Using a triangular matching approach for latent fingerprint and palmprint identification. Int. J. Pattern Recognit. Artif. Intell. 2014, 28, 1460004. [Google Scholar] [CrossRef]
- Available online: http://bias.csr.unibo.it/fvc2002/databases.asp (accessed on 15 January 2023).
- Available online: http://ivg.au.tsinghua.edu.cn/dataset/THUPALMLAB.php (accessed on 15 January 2023).
- Carreira, L.; Correia, P.L.; Soares, L.D. On high-resolution palmprint matching. In Proceedings of the 2nd International Workshop on Biometrics and Forensics, Valletta, Malta, 27–28 March 2014; pp. 1–6. [Google Scholar]
- Chaidee, W.; Horapong, K.; Areekul, V. Filter design based on spectral dictionary for latent fingerprint pre-enhancement. In Proceedings of the 2018 International Conference on Biometrics (ICB), Gold Coast, Australia, 20–23 February 2018; pp. 23–30. [Google Scholar]
- Ignat, A.; Păvăloi, I. Palmprint Classification Using Fixed Sift Descriptors Number. Biomed. Eng. 2022, 67, 219–224. [Google Scholar]
- Rodríguez-Ruiz, J.; Medina-Pérez, M.A.; Monroy, R.; Loyola-González, O. A survey on minutiae-based palmprint feature representations, and a full analysis of palmprint feature representation role in latent identification performance. Expert Syst. Appl. 2019, 131, 30–44. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fingerprint Quality and Geometrical Variations | No. of Genuine Tests | No. of Impostor Tests | GAR | FAR | EER |
|---|---|---|---|---|---|
| Partial-quality images without geometrical variations (35 users) | 200 | 8538 | 97.3% | 1% | 1.87% |
| Partial-quality images with geometrical variations (67 users) | 962 | 67,944 | 94.2% | 1% | 1.97% |
| Palmprint Quality | No. of Genuine Tests | No. of Impostor Tests | GAR |
|---|---|---|---|
| Partially degraded impressions with geometrical variations (25 users) | 1400 | 38,400 | 88.5% |
| Partially degraded impressions with geometrical variations (35 users) | 1960 | 76,160 | 90% |
| Extremely degraded impressions with geometrical variations (40 users) | 2233 | 99,525 | 80.33% |
| Palm Print Quality Type | EER Using DTG | EER Using SIFT [16] |
|---|---|---|
| Partially degraded impressions with geometrical variations (25 users) | 5.76% | 7.60% |
| Partially degraded impressions with geometrical variations (35 users) | 5.69% | 6.44% |
| Extremely degraded (low-quality) impressions with geometrical variations (40 users) | 6.94% | 10.85% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohamed Abdul Cader, A.J.; Banks, J.; Chandran, V. Invariant Feature Encoding for Contact Handprints Using Delaunay Triangulated Graph. Appl. Sci. 2023, 13, 10874. https://doi.org/10.3390/app131910874
Mohamed Abdul Cader AJ, Banks J, Chandran V. Invariant Feature Encoding for Contact Handprints Using Delaunay Triangulated Graph. Applied Sciences. 2023; 13(19):10874. https://doi.org/10.3390/app131910874
Chicago/Turabian StyleMohamed Abdul Cader, Akmal Jahan, Jasmine Banks, and Vinod Chandran. 2023. "Invariant Feature Encoding for Contact Handprints Using Delaunay Triangulated Graph" Applied Sciences 13, no. 19: 10874. https://doi.org/10.3390/app131910874