
A Novel Deep-Learning Model for Remote Driver Monitoring in SDN-Based Internet of Autonomous Vehicles Using 5G Technologies


Abstract
1. Introduction
- The deployment of the Software-Defined Network (SDN) paradigm to implement the 5G slicing feature to allow the dynamic allocation of resources to support the Key Performance Indicators (KPIs) (e.g., low latency, low packet loss requirements) of heterogeneous autonomous vehicle applications.
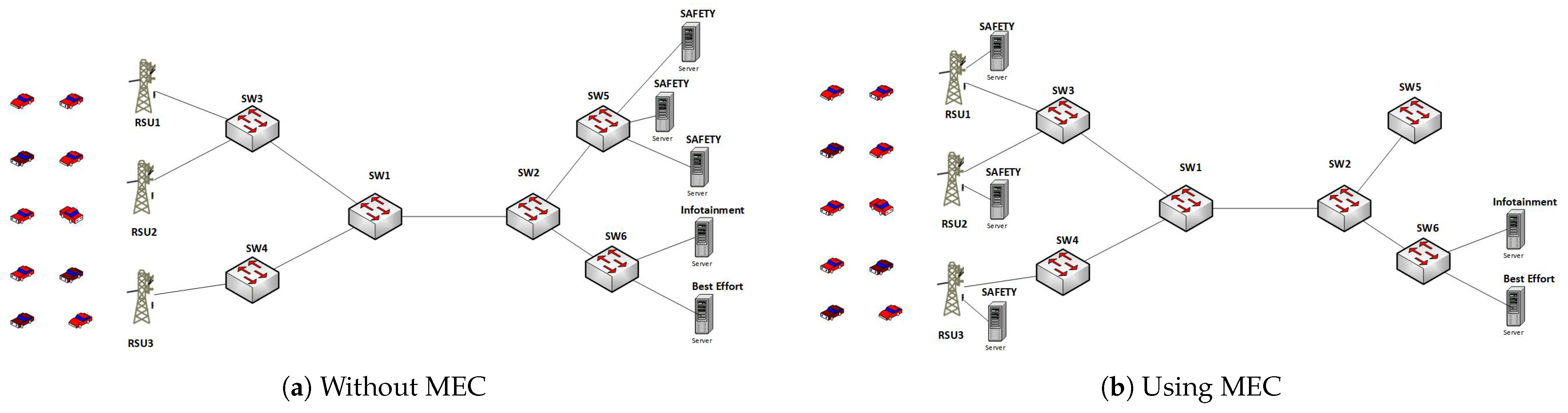
- The application of the edge computing concept by deploying AI techniques at the edge in an autonomous vehicle to remotely monitor driver status and report critical cases only to the Remote Control Center (RCC). Integration between the AI techniques and edge-computing paradigm result-in a significant decrease in the bandwidth required. Besides, the deployment of the MEC concept to implement the safety servers and to provide further support to the delay requirement.
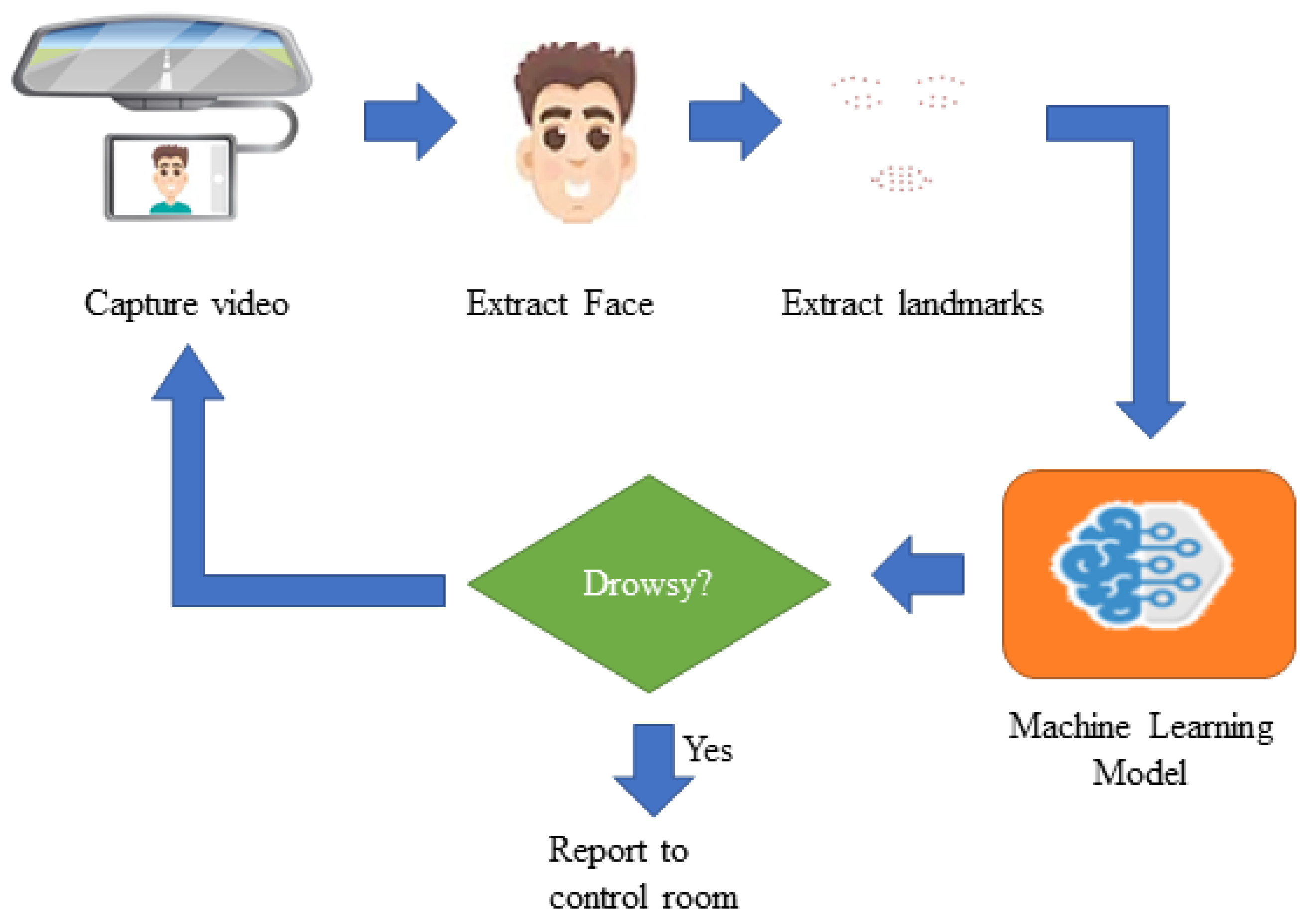
- The complete pipeline starts from the video stream captured by the mobile phone following the machine-learning steps to determine whether or not a driver is drowsy. Finally, employing SDN as the implementation technique of 5G slicing to forward the critical messages with the required level of QoS to the control center.
- A validation of the proposed SDN-VANET QoS framework using a realistic urban congestion scenario and performing a comparison between the adaptive and the QoS-free approach.
2. Materials and Methods
2.1. Communication Technologies
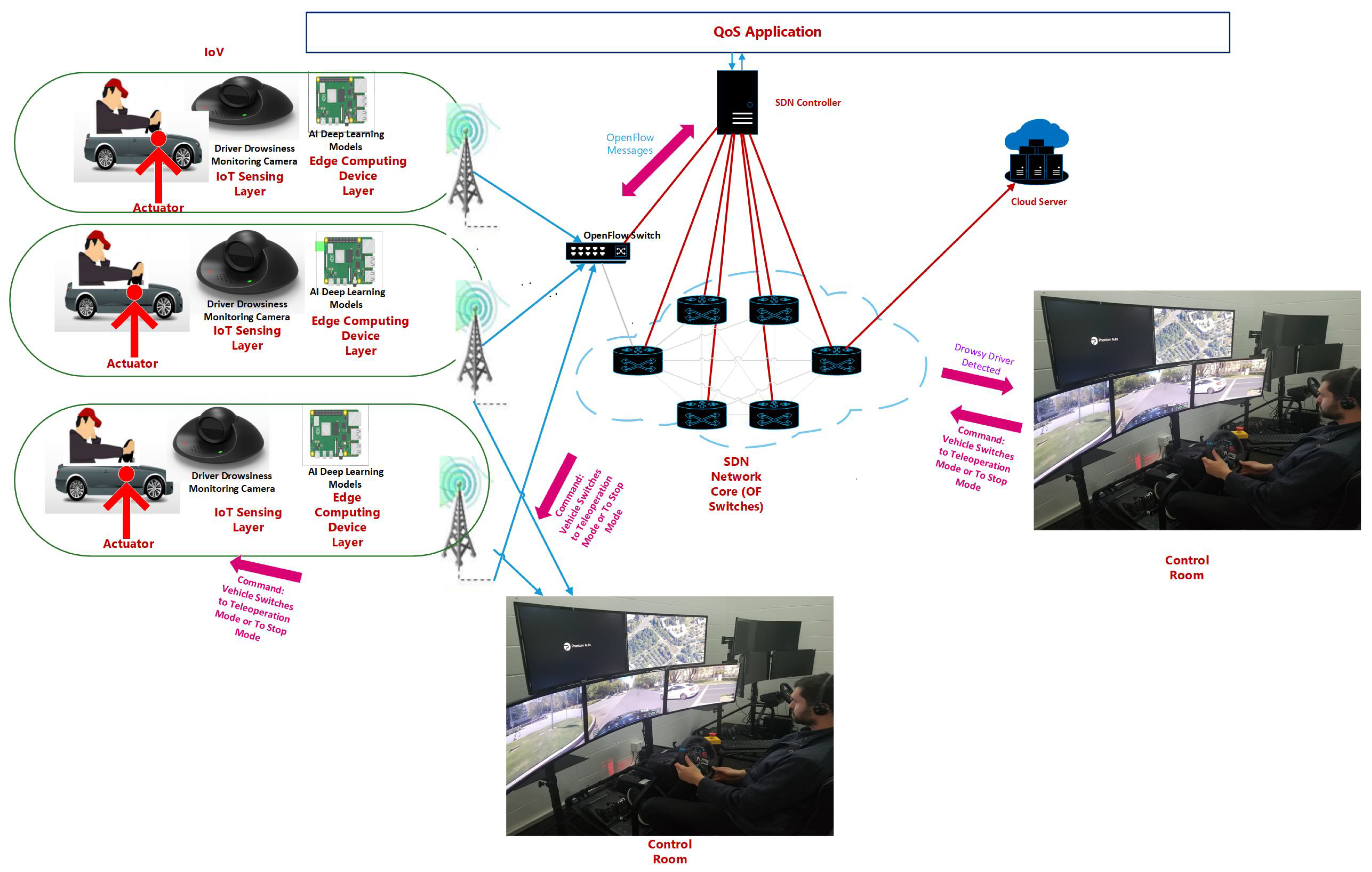
2.2. Proposed Model Architecture
2.2.1. Application Plane
2.2.2. Data Plane
2.2.3. Control Plane
2.2.4. IoV Layer
2.2.5. Edge Computing Device Layer
3. Results
3.1. Performance Evaluation
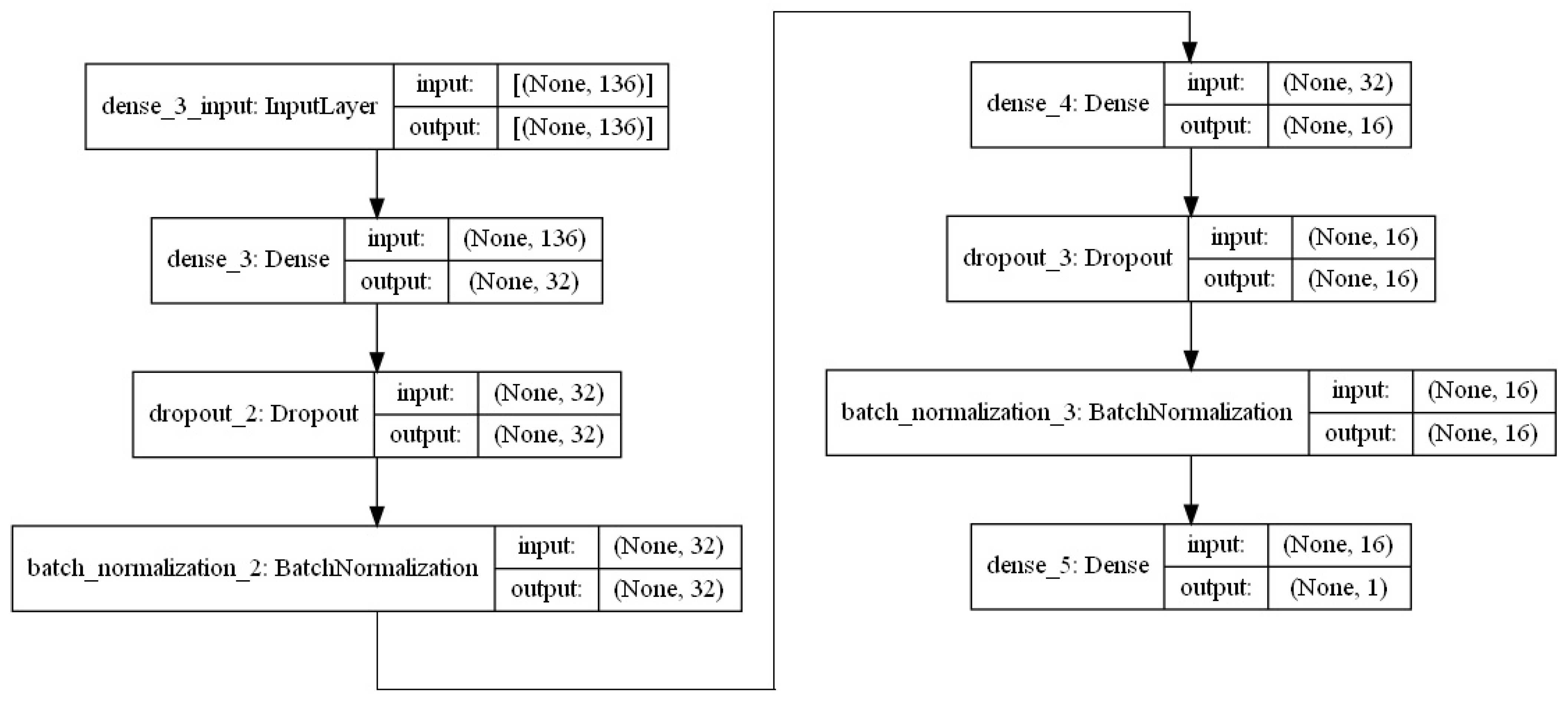
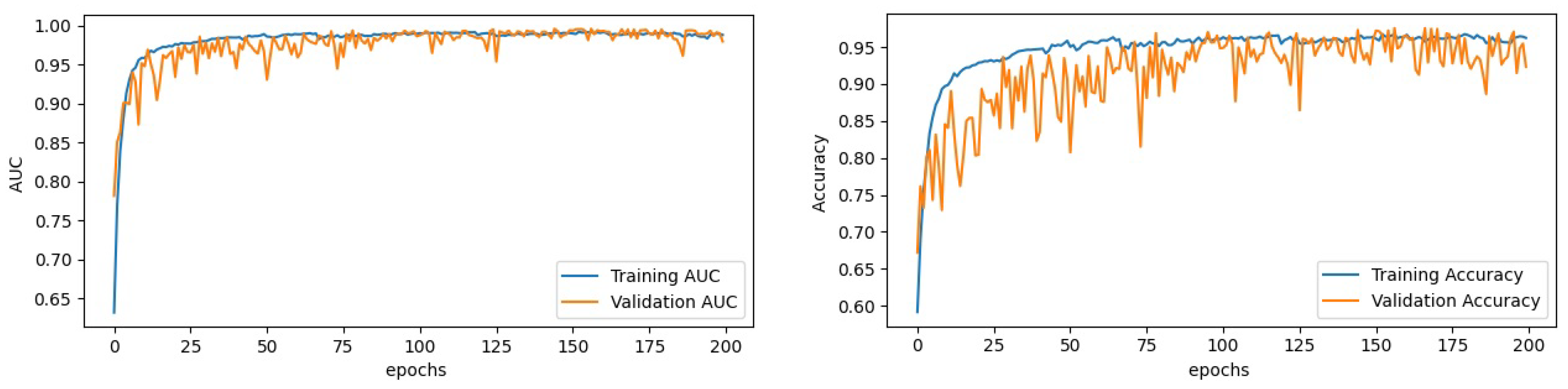
Machine Learning Evaluation
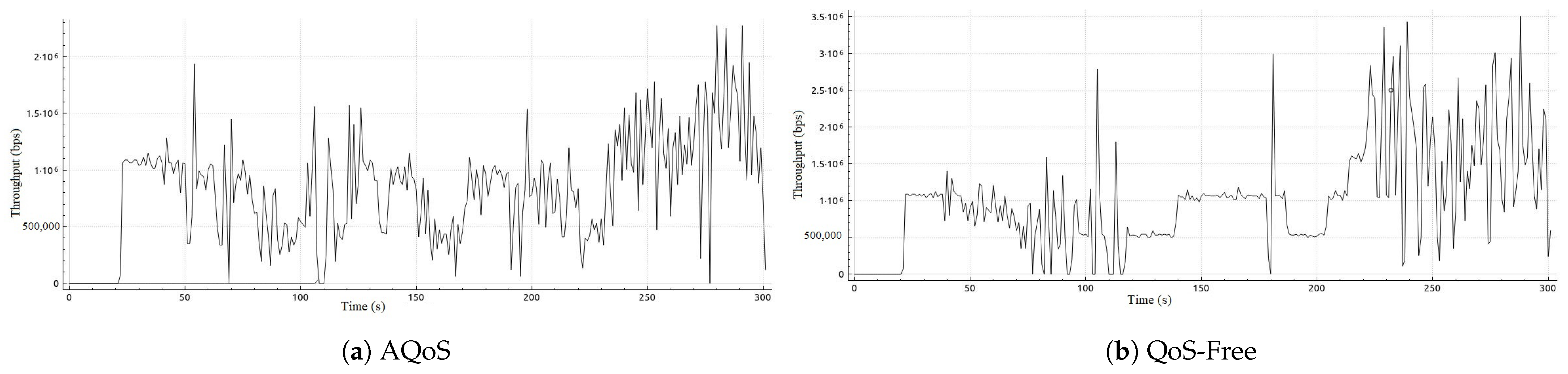
3.2. Sdn-Vanet QoS Framework Evaluation
Performance Metrics
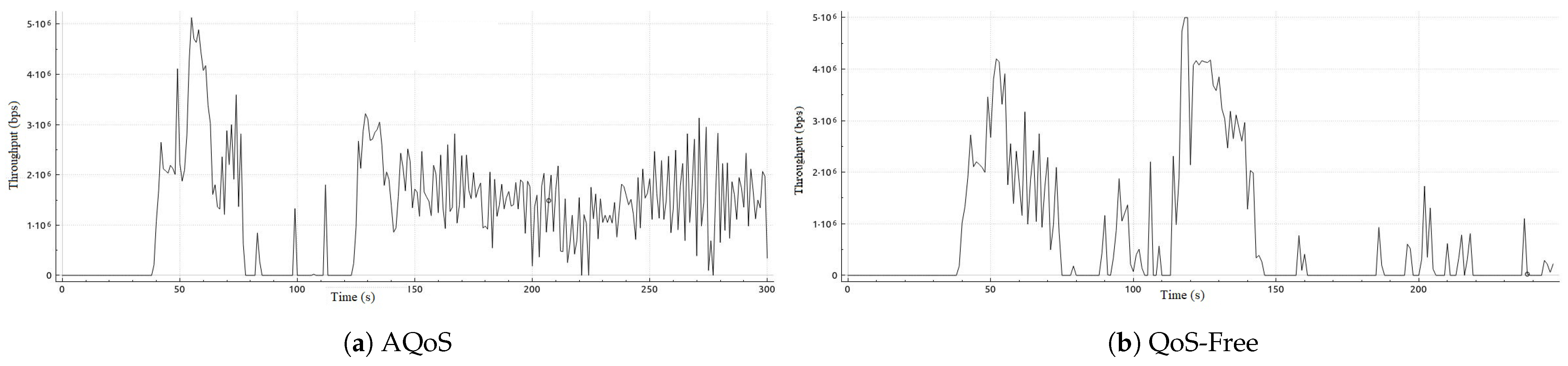
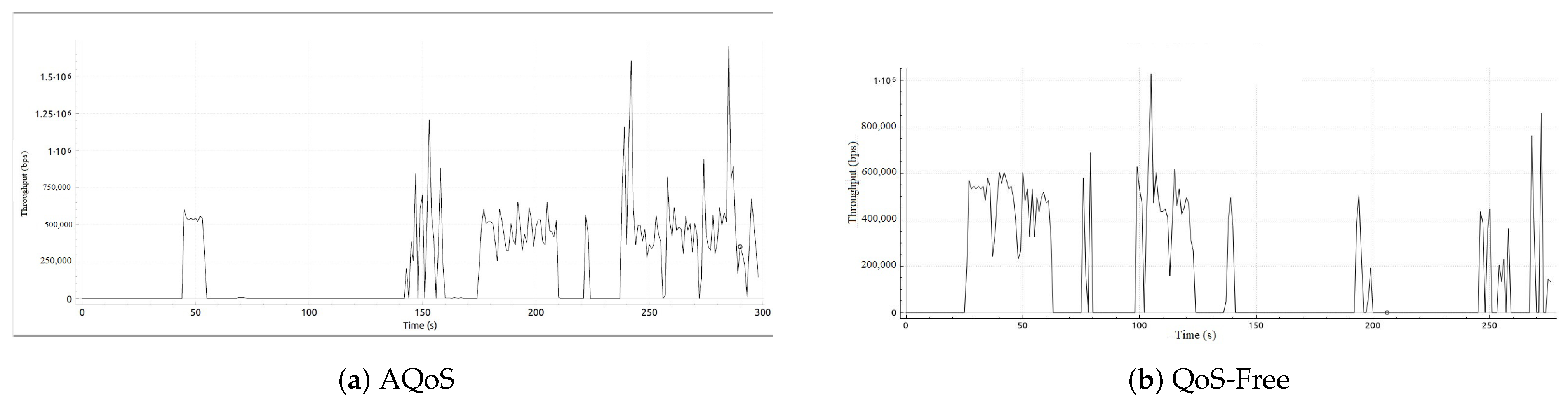
3.3. Evaluation Scenario 1
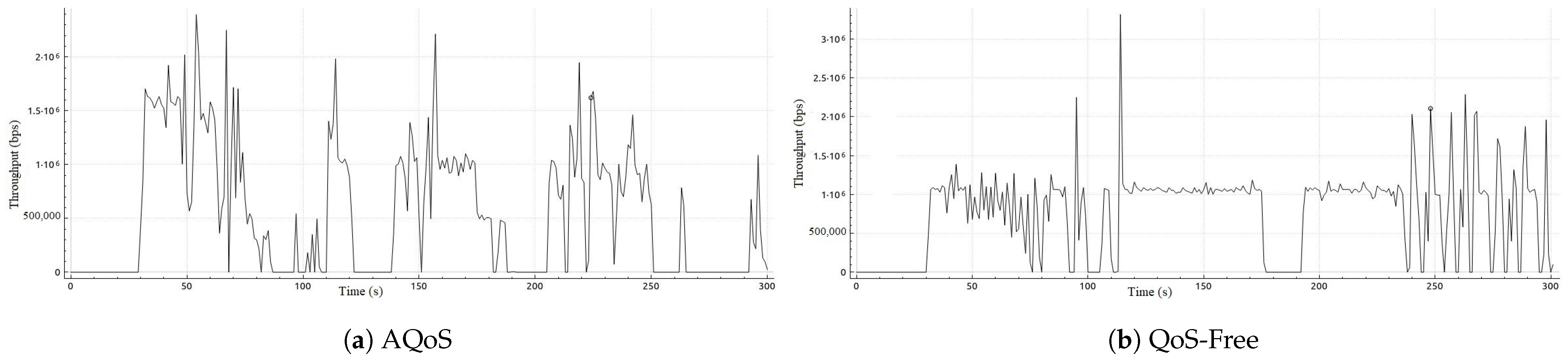
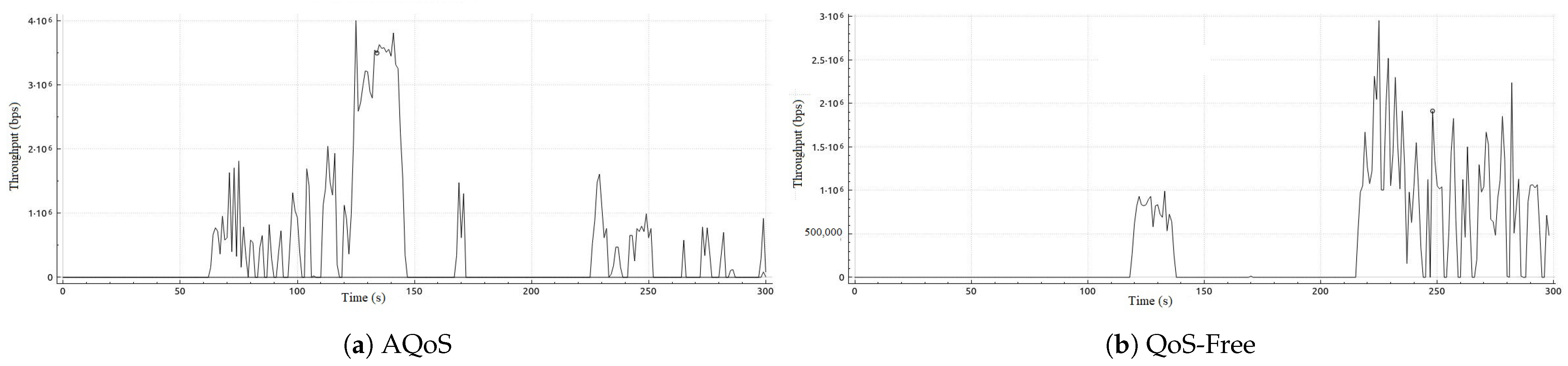
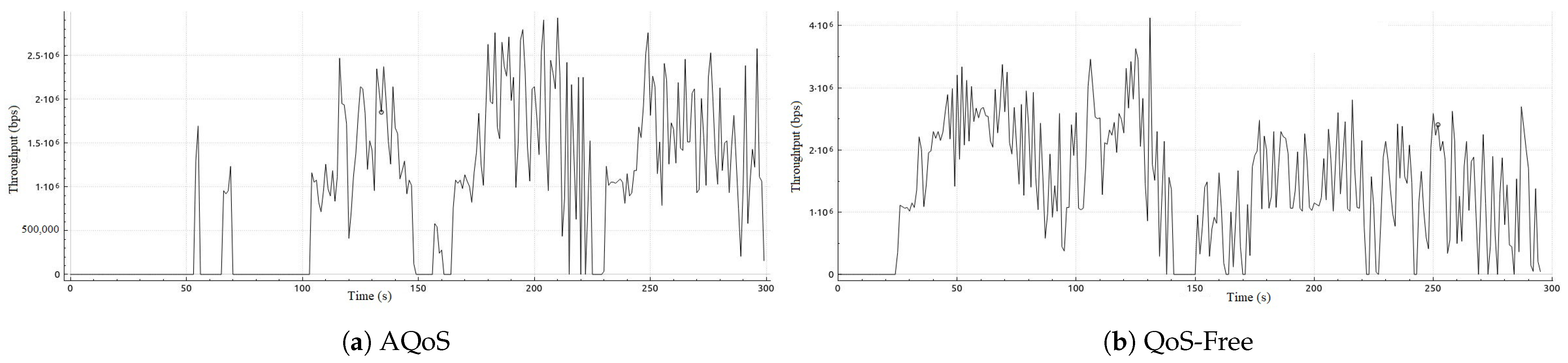
3.3.1. Evaluation Scenario 2
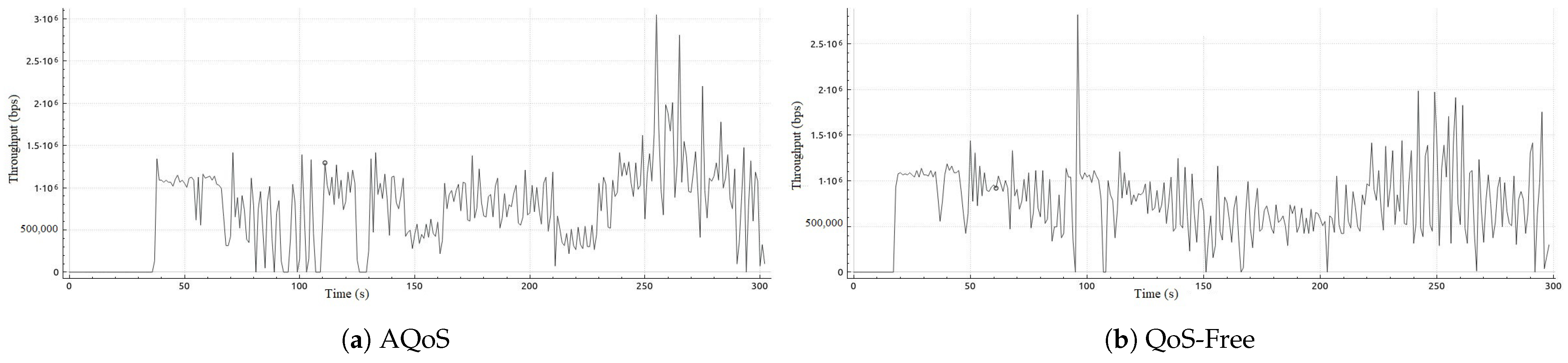
3.3.2. Evaluation Scenario 3
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AI | Artificial Intelligence |
| API | Application Programming Interface |
| AVs | Autonomous Vehicles |
| ICMP | Internet Control Message Protocol |
| IoT | Internet of Things |
| IoV | Internet of Vehicles |
| ITS | Intelligent Transportation Systems |
| KPI | Key Performance Indicator |
| MEC | Mobile Edge Computing |
| NBI | North Bound Interface |
| NHTSA | National Highway Traffic Safety Administration |
| QoS | Quality of Service |
| RAN | Radio Access Network |
| RCC | Remote Control Center |
| RSU | Road Side Unit |
| SDN | Software Defined Networks |
| SUMO | Simulation of Urban MObility |
| V2I | Vehicle to Infrastructure |
| V2P | Vehicle to Person |
| V2X | Vehicle to Everything |
| V2V | Vehicle to Vehicle |
| VANET | Vehicular Adhoc Networks |
References
- Placek, M. Autonomous Car Market Size Worldwide 2021–2026. Report, March 2021. Available online: https://www.researchandmarkets.com/reports/5359435/global-autonomous-cars-market-2021-2026-by (accessed on 1 December 2022).
- Law, C. The Dangers of Driverless Cars. Natl. Law Rev. 2022, XII. Available online: https://www.natlawreview.com/article/dangers-driverless-cars (accessed on 30 November 2022).
- Feiler, J.; Hoffmann, S.; Diermeyer, F. Concept of a Control Center for an Automated Vehicle Fleet. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems, ITSC 2020, Rhodes, Greece, 20–23 September 2020. [Google Scholar] [CrossRef]
- Kaur, K.; Garg, S.; Kaddoum, G.; Kumar, N.; Gagnon, F. SDN-Based Internet of Autonomous Vehicles: An Energy-Efficient Approach for Controller Placement. IEEE Wirel. Commun. 2019, 26, 72–79. [Google Scholar] [CrossRef]
- Kreutz, D.; Ramos, F.M.V.; Veríssimo, P.E.; Rothenberg, C.E.; Azodolmolky, S.; Uhlig, S. Software-Defined Networking: A Comprehensive Survey. Proc. IEEE 2015, 103, 14–76. [Google Scholar] [CrossRef]
- Karakus, M.; Durresi, A. Quality of Service (QoS) in Software Defined Networking (SDN): A survey. J. Netw. Comput. Appl. 2017, 80, 200–218. [Google Scholar] [CrossRef]
- Mahi, M.J.N.; Chaki, S.; Ahmed, S.; Biswas, M.; Kaiser, M.S.; Islam, M.S.; Sookhak, M.; Barros, A.; Whaiduzzaman, M. A Review on VANET Research: Perspective of Recent Emerging Technologies. IEEE Access 2022, 10, 65760–65783. [Google Scholar] [CrossRef]
- Storck, C.R.; Duarte-Figueiredo, F. A 5G V2X ecosystem providing internet of vehicles. Sensors (Switzerland) 2019, 19, 550. [Google Scholar] [CrossRef]
- Do Vale Saraiva, T.; Campos, C.A.V.; Fontes, R.D.R.; Rothenberg, C.E.; Sorour, S.; Valaee, S. An Application-Driven Framework for Intelligent Transportation Systems Using 5G Network Slicing. IEEE Trans. Intell. Transp. Syst. 2021, 22, 5247–5260. [Google Scholar] [CrossRef]
- Pandey, N.N.; Muppalaneni, N.B. Temporal and spatial feature based approaches in drowsiness detection using deep learning technique. J. -Real-Time Image Process. 2021, 18, 2287–2299. [Google Scholar] [CrossRef]
- Pandey, N.N.; Muppalaneni, N.B. A survey on visual and non-visual features in Driver’s drowsiness detection. Multimed. Tools Appl. 2022, 2022, 1–41. [Google Scholar] [CrossRef]
- Li, X.; Samaka, M.; Chan, H.A.; Bhamare, D.; Gupta, L.; Guo, C.; Jain, R. Network Slicing for 5G: Challenges and Opportunities. IEEE Internet Comput. 2018, 21, 20–27. [Google Scholar] [CrossRef]
- Dos Reis Fontes, R.; Campolo, C.; Esteve Rothenberg, C.; Molinaro, A. From theory to experimental evaluation: Resource management in software-defined vehicular networks. IEEE Access 2017, 5, 3069–3076. [Google Scholar] [CrossRef]
- Fathy, C.; Saleh, S.N. Integrating Deep Learning-Based IoT and Fog Computing with Software-Defined Networking for Detecting Weapons in Video Surveillance Systems. Sensors 2022, 22, 5075. [Google Scholar] [CrossRef] [PubMed]
- Ryu. Ryu Documentation. 2016. p. 490. Available online: https://media.readthedocs.org/pdf/ryu/latest/ryu.pdf (accessed on 30 November 2022).
- Viola, P.; Jones, M. Rapid object detection using a boosted cascade of simple features. In Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, CVPR 2001, Kauai, HI, USA, 8–14 December 2001; Volume 1, p. 1. [Google Scholar]
- Viola, P.; Jones, M. Robust real-time object detection. Int. J. Comput. Vis. 2001, 4, 4. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Tan, M.; Le, Q. Efficientnet: Rethinking model scaling for convolutional neural networks. In Proceedings of the International Conference on Machine Learning, PMLR, Long Beach, CA, USA, 9–15 June 2019; pp. 6105–6114. [Google Scholar]
- Iandola, F.N.; Han, S.; Moskewicz, M.W.; Ashraf, K.; Dally, W.J.; Keutzer, K. SqueezeNet: AlexNet-level accuracy with 50x fewer parameters and< 0.5 MB model size. arXiv 2016, arXiv:1602.07360. [Google Scholar]
- Ghoddoosian, R.; Galib, M.; Athitsos, V. A realistic dataset and baseline temporal model for early drowsiness detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Long Beach, CA, USA, 16–17 June 2019. [Google Scholar]
- Nasri, I.; Karrouchi, M.; Snoussi, H.; Kassmi, K.; Messaoudi, A. Detection and Prediction of Driver Drowsiness for the Prevention of Road Accidents Using Deep Neural Networks Techniques. In WITS 2020; Springer: Singapore, 2022; pp. 57–64. [Google Scholar]
- Fontes, R.R.; Afzal, S.; Brito, S.H.B.; Santos, M.A.S.; Rothenberg, C.E. Mininet-WiFi: Emulating Software-Defined Wireless Networks. In Proceedings of the 2015 11th International Conference on Network and Service Management (CNSM), Barcelona, Spain, 9–13 November 2015; pp. 384–389. [Google Scholar]
- Lopez, P.A.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flötteröd, Y.P.; Hilbrich, R.; Lücken, L.; Rummel, J.; Wagner, P.; Wießner, E. Microscopic Traffic Simulation using SUMO. In Proceedings of the 21st IEEE International Conference on Intelligent Transportation Systems, Maui, HI, USA, 4–7 November 2018. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Training | Testing | |||||||
|---|---|---|---|---|---|---|---|---|
| Accuracy | Precision | Recall | F-Measure | Accuracy | Precision | Recall | F-Measure | |
| Adaboost | 63.74% | 81.47% | 41.65% | 55.12% | 53.59% | 67.19% | 25.54% | 37.01% |
| Random Forest | 99.59% | 99.58% | 99.65% | 99.61% | 51.82% | 56.28% | 44.37% | 49.62% |
| SVC | 81.97% | 86.55% | 78.50% | 82.33% | 66.69% | 61.21% | 95.55% | 74.62% |
| Proposed Dense | 97.72% | 97.82% | 97.93% | 97.87% | 74.85% | 72.92% | 84.26% | 78.18% |
| Training | Testing | |||||||
|---|---|---|---|---|---|---|---|---|
| Accuracy | Precision | Recall | F-Measure | Accuracy | Precision | Recall | F-Measure | |
| Adaboost | 64.12% | 80.07% | 43.84% | 56.66% | 62.34% | 68.77% | 54.16% | 60.60% |
| Random Forest | 99.70% | 99.71% | 99.72% | 99.72% | 78.01% | 81.93% | 75.46% | 78.56% |
| SVC | 78.53% | 83.26% | 74.94% | 78.88% | 78.29% | 80.26% | 78.68% | 79.46% |
| Proposed Dense | 98.13% | 98.25% | 98.25% | 98.25% | 85.69% | 82.23% | 93.37% | 87.45% |
| Parameter | Value |
|---|---|
| Number of Vehicles | 158 |
| Number of RSUs | 3 |
| RSUs Range | 250 m |
| Number of Switches (Core Network) | 6 |
| Propagation Model | Log Distance |
| RAN MAC Layer | IEEE802.11 g |
| Number of Applications Types | 3 |
| Emulation Time | 300 s |
| Model | Application | Minimum RTT | Average RTT |
|---|---|---|---|
| MEC (AQoS) | Safety Applications | 1.146 ms | 73.46 ms |
| MEC (AQoS) | Infotainment Applications | 6.93 ms | 3061.63 ms |
| MEC (QoS-Free) | Safety Applications | 6.945 ms | 289.56 ms |
| MEC (QoS-Free) | Infotainment Applications | 16,133.43 ms | 33,570.39 ms |
| No MEC (AQoS) | Safety Applications | 4.82 ms | 3849.49 ms |
| No MEC (QoS-Free) | Safety Applications | 2475.84 ms | 6878.73 ms |
| Applications | Use | Data Rate KPI | Protocol | Port | Priority Class |
|---|---|---|---|---|---|
| S | Safety | 0.5 Mbps | UDP | 5002 | 1 |
| IF | Infotainment | 1.5 Mbps | UDP | 5003 | 2 |
| BE | Best-Effort | 0.5 Mbps | UDP | 5004 | 3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saleh, S.N.; Fathy, C. A Novel Deep-Learning Model for Remote Driver Monitoring in SDN-Based Internet of Autonomous Vehicles Using 5G Technologies. Appl. Sci. 2023, 13, 875. https://doi.org/10.3390/app13020875
Saleh SN, Fathy C. A Novel Deep-Learning Model for Remote Driver Monitoring in SDN-Based Internet of Autonomous Vehicles Using 5G Technologies. Applied Sciences. 2023; 13(2):875. https://doi.org/10.3390/app13020875
Chicago/Turabian StyleSaleh, Sherine Nagy, and Cherine Fathy. 2023. "A Novel Deep-Learning Model for Remote Driver Monitoring in SDN-Based Internet of Autonomous Vehicles Using 5G Technologies" Applied Sciences 13, no. 2: 875. https://doi.org/10.3390/app13020875
APA StyleSaleh, S. N., & Fathy, C. (2023). A Novel Deep-Learning Model for Remote Driver Monitoring in SDN-Based Internet of Autonomous Vehicles Using 5G Technologies. Applied Sciences, 13(2), 875. https://doi.org/10.3390/app13020875