
Wind Speed Spectrum of a Moving Vehicle under Turbulent Crosswinds


Abstract
:1. Introduction
2. Wind Speed Spectrum Models
2.1. Wind Speed Spectrum of a Static Vehicle
2.2. Wind Speed Spectrum of a Moving Vehicle
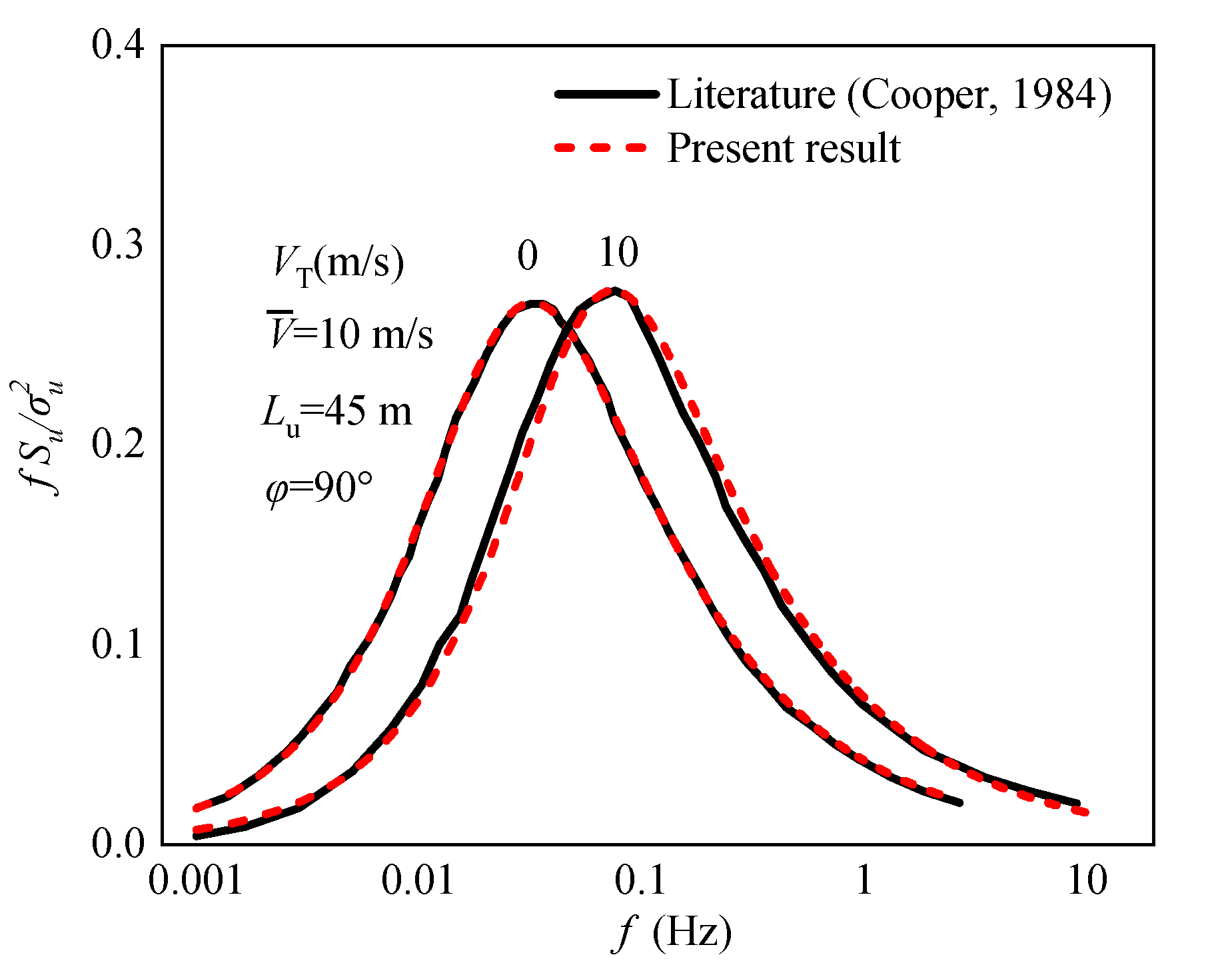
2.3. Validation of the Proposed Model
3. Turbulent Wind Flow Characteristics in Wind Tunnel
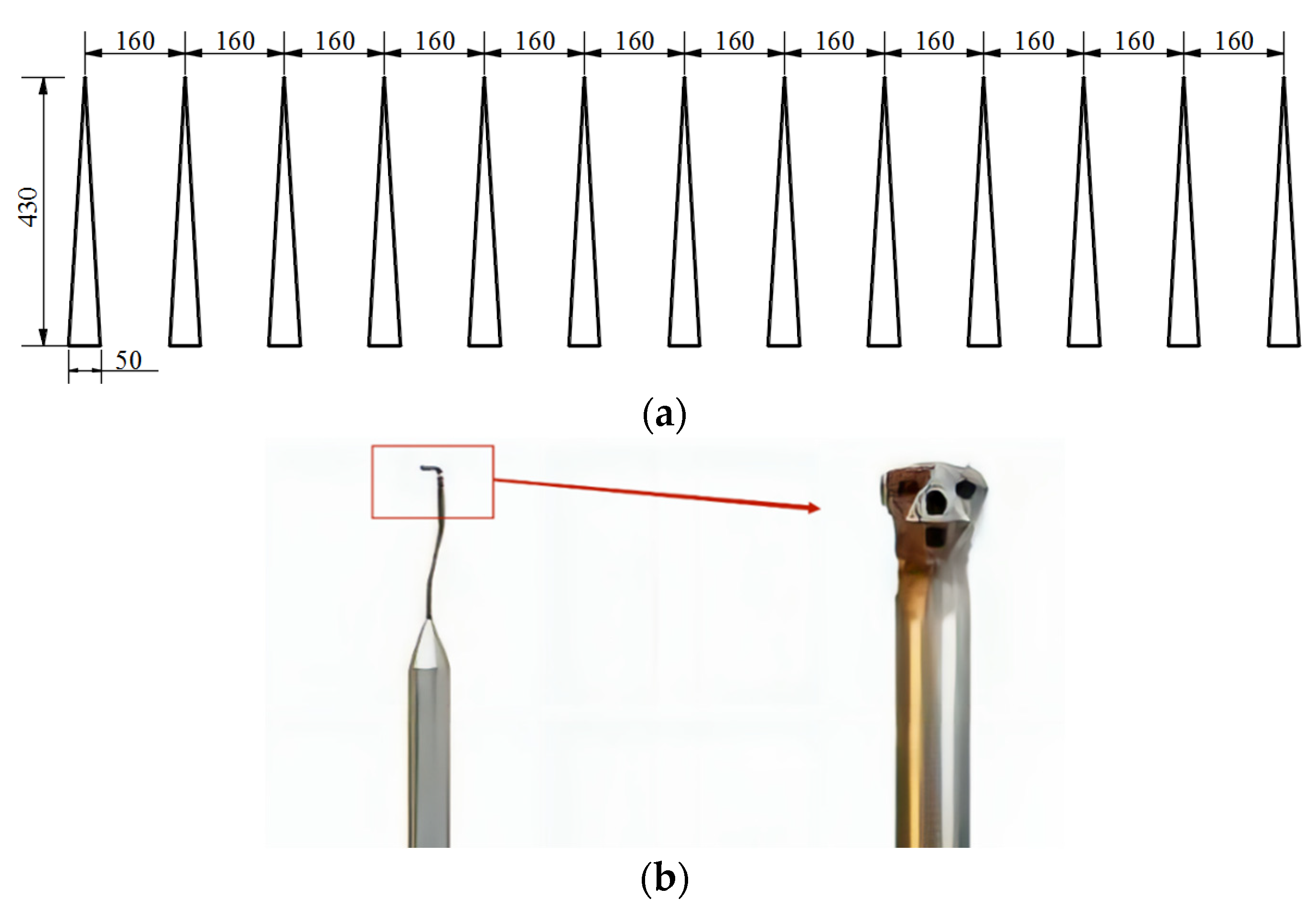
3.1. Wind Tunnel Tests
3.2. Turbulent Wind Flow Characteristics
4. Wind Speed Spectrum of a Moving Vehicle
4.1. Results
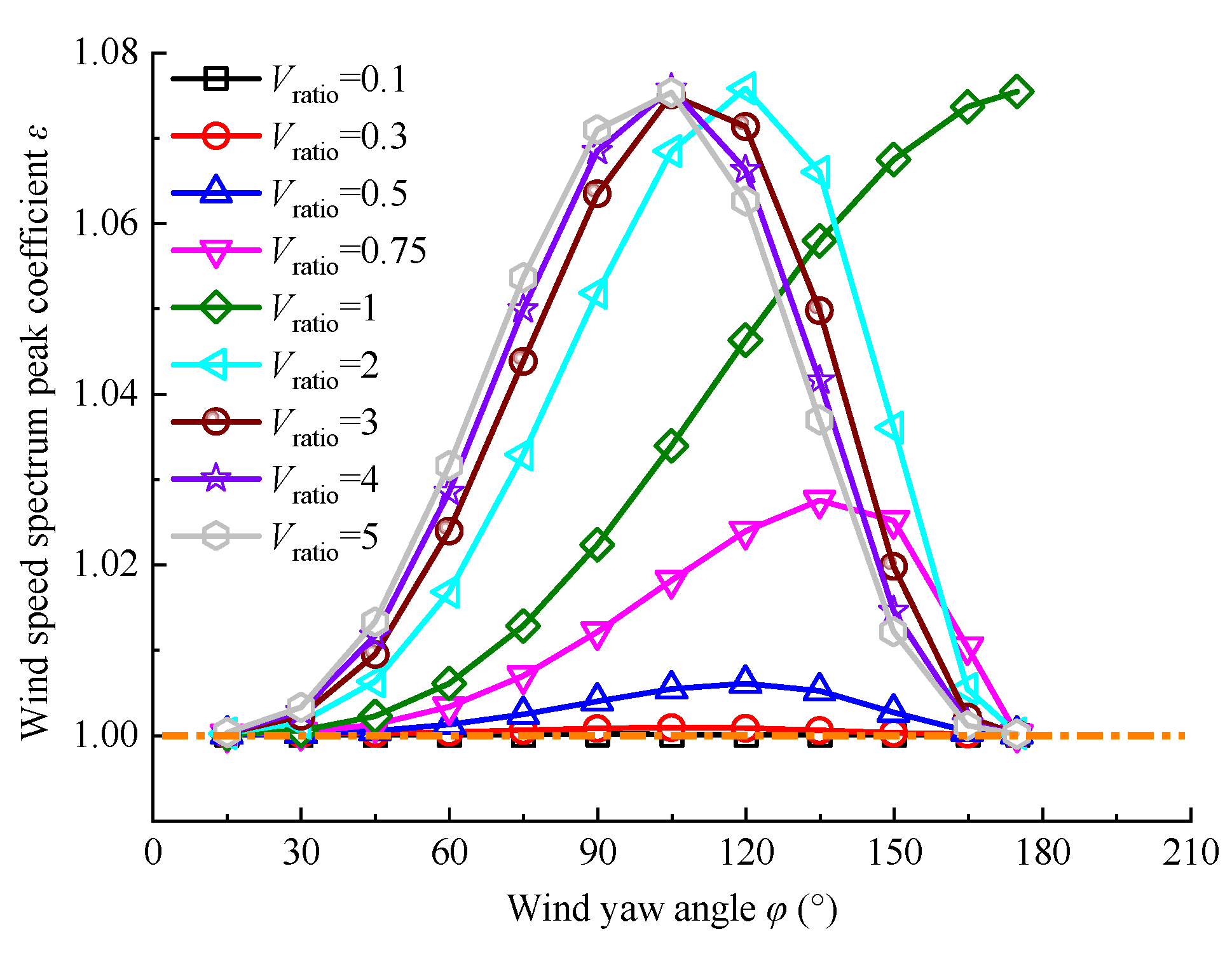
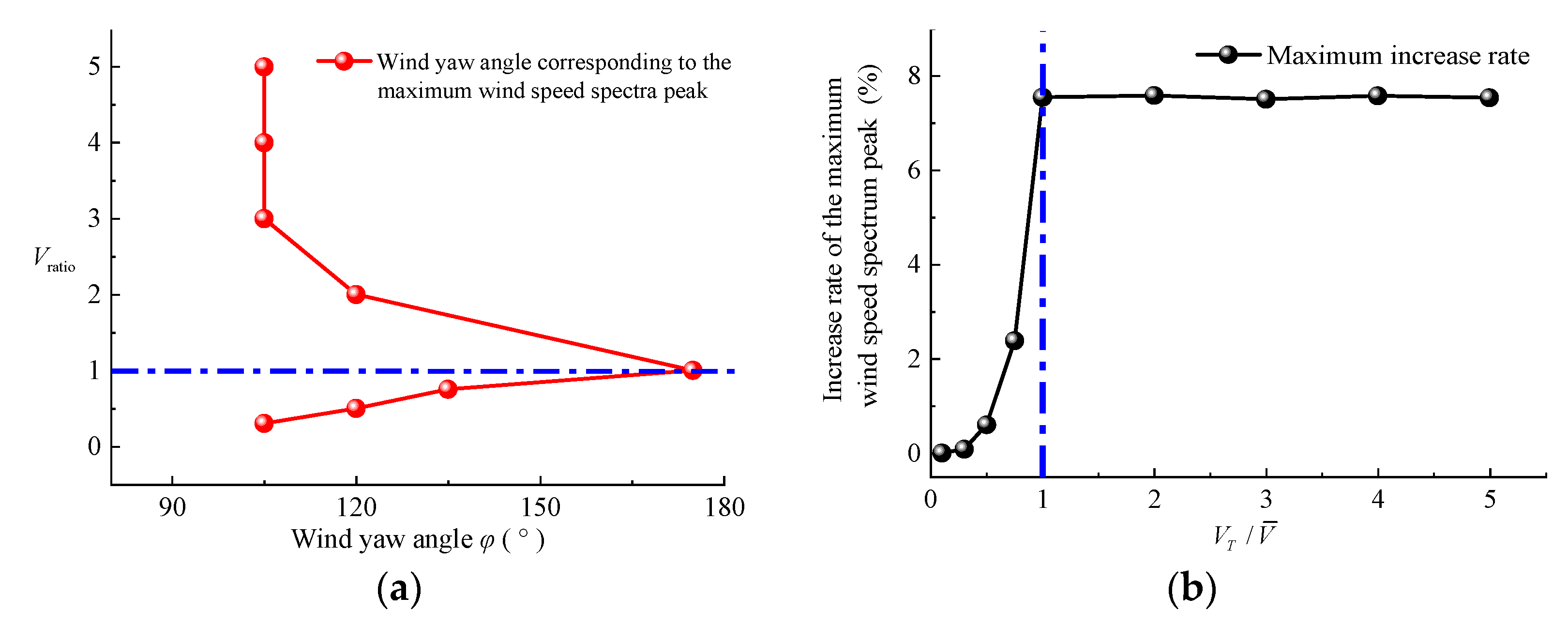
4.2. Discussion of Wind Speed Spectrum Peak
4.3. Discussion of Frequencies Corresponding to Wind Speed Spectrum Peak
5. Coherence Function
6. Conclusions
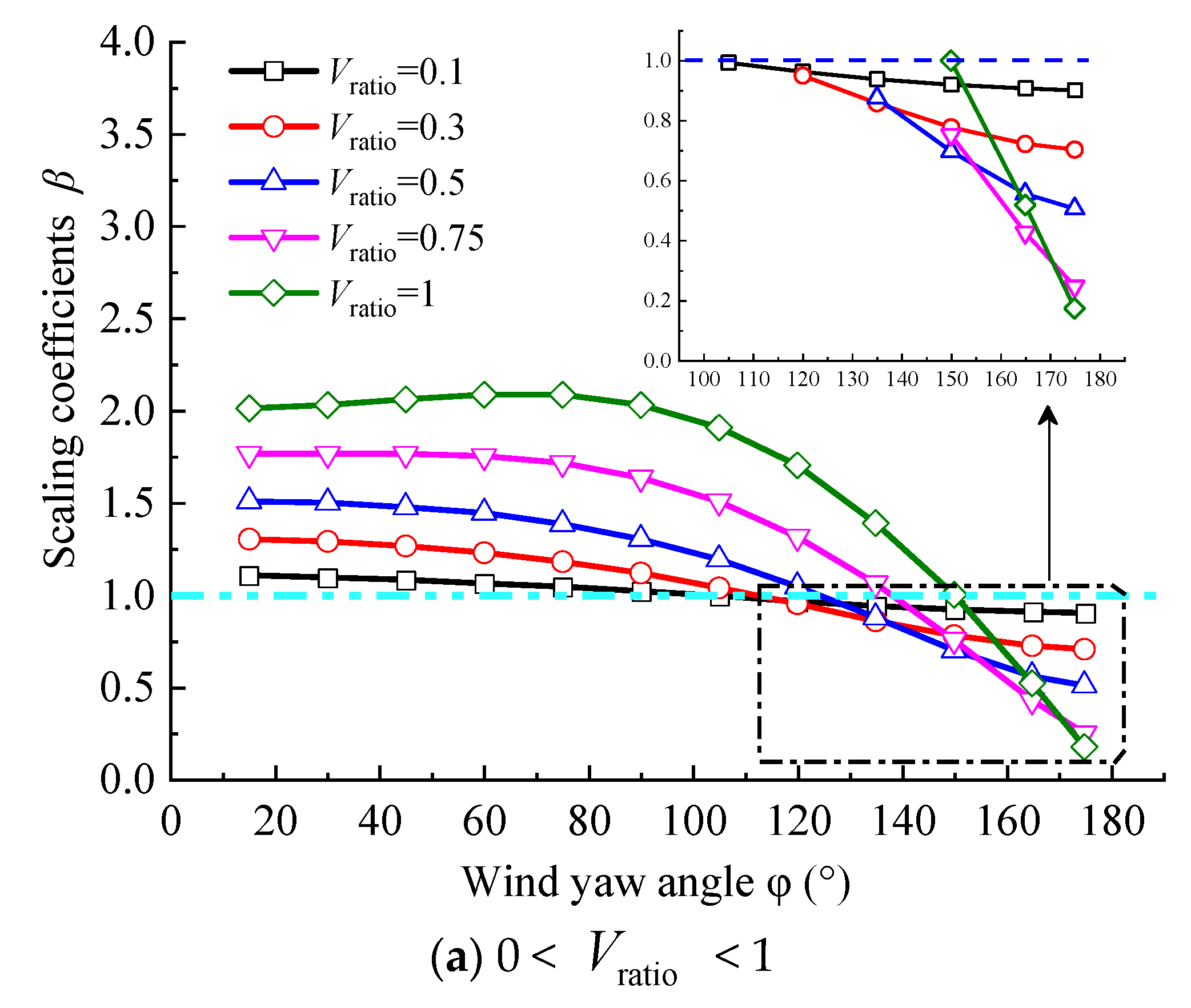
- The wind speed spectrum peak changes with the wind yaw angles into the sinusoidal curve at different Vratio values. When the Vratio value is 0.1, the wind speed spectrum peak of the moving point gradually coincides with the peak of the static point at different wind yaw angles. As the Vratio is increased, the wind speed spectrum peak is at its maximum under smaller wind yaw angles, which is from 175° to 105° generally.
- As the wind yaw angle gradually increases, the influence of the transverse wind speed spectrum also gradually increases. When the Vratio is 2, 3, 4 or 5, the frequency corresponding to the wind speed spectrum peak is first increased and then decreased.
- The increases in both coherence and the power spectrum contribute to the larger aerodynamic forces and wind-induced vehicle vibration as the speed ratio increases. The correlation characteristics of the moving vehicles, which are of great influence, could be investigated by wind tunnel tests in further studies.
- The wind speed spectrum and cross-correlation characteristics of moving points could be experimentally investigated in wind tunnels to further analyze the mathematical model. Furthermore, investigation of the aerodynamic characteristics of the moving vehicles should also be conducted.
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Guo, W.W.; Xia, H. Dynamic responses of long-span bridges and running safety of trains under wind action. China Railw. Sci. 2006, 2, 137–139. [Google Scholar] [CrossRef]
- Ma, C.M.; Duan, Q.S.; LI, Q.S.; Chen, K.J.; Liao, H.L. Buffeting forces on static trains on a truss girder in turbulent crosswinds. J. Bridge Eng. 2018, 23, 04018086. [Google Scholar] [CrossRef]
- Huang, T.M.; Feng, M.C.; Huang, J.; Ma, J.M.; Yi, D.; Ren, X. Aerodynamic stability of high-speed vehicle passing bridge tower in different lanes under crosswind conditions. J. Wind Eng. Ind. Aerodyn. 2023, 242, 105560. [Google Scholar] [CrossRef]
- Li, M.; Li, M.S.; Yang, Y. Strategy for the determination of unsteady aerodynamic forces on elongated bodies in grid-generated turbulent flow. Exp. Therm. Fluid Sci. 2020, 110, 109939. [Google Scholar] [CrossRef]
- Li, X.Z.; Qiu, X.W.; Zhang, J.; Wang, M. Aerodynamic characteristics of fully enclosed sound barrier induced by the passing trains with 400 km/h. J. Wind Eng. Ind. Aerodyn. 2023, 241, 105518. [Google Scholar] [CrossRef]
- Li, Y.L.; Qiang, S.Z.; Liao, H.L.; Xu, Y.L. Dynamic of wind-rail vehicle-bridge system. J. Wind Eng. Ind. Aerodyn. 2005, 93, 483–507. [Google Scholar] [CrossRef]
- Li, X.Z.; Xiao, J.; Liu, D.J.; Wang, M. Fluctuating wind velocity spectra of moving vehicle under horizontal crosswind. Sci. Sin. Tech. 2016, 46, 1263–1270. [Google Scholar] [CrossRef]
- Li, X.Z.; Xiao, J.; Liu, D.J.; Wang, M. An Analytical Model for the Fluctuating Wind Velocity Spectra of a Moving Vehicle. J. Wind Eng. Ind. Aerodyn. 2017, 164, 34–43. [Google Scholar] [CrossRef]
- Xu, Y.L.; Zhang, N.; Xia, H. Vibration of coupled train and cable-stayed bridge system in crosswinds. Eng. Struct. 2006, 26, 1389–1406. [Google Scholar] [CrossRef]
- Cai, C.S.; Chen, S.R. Framework of vehicle-bridge wind dynamic analysis. J. Wind. Eng. Ind. Aerodyn. 2004, 92, 579–607. [Google Scholar] [CrossRef]
- Cooper, R.K. Atmospheric Turbulence with Respect to Moving Ground Vehicles. J. Wind Eng. Ind. Aerodyn. 1984, 17, 215–238. [Google Scholar] [CrossRef]
- Watkins, S.; Saunders, J.W.; Hoffemann, P.H. Turbulence Experienced by Moving Vehicles. Part I. Introduction and Turbulence Intensity. J. Wind Eng. Ind. Aerodyn. 1995, 57, 1–17. [Google Scholar] [CrossRef]
- Watkins, S.; Milbank, J.; Loxton, B.J.; Melbourne, W.H. Atmospheric Winds and Their Implications for Micro air Vehicles. Aiaa J. 2006, 44, 2591–2600. [Google Scholar] [CrossRef]
- Hu, P.; Lin, W.; Yang, D.G.; Han, Y.; Yan, C. Fluctuating wind speed spectrum of a moving vehicle under crosswinds. China J. Highw. Transp. 2018, 31, 101–109. [Google Scholar]
- Hu, P.; Han, Y.; Cai, C.S.; Cheng, W.; Lin, W. New analytical models for power spectral density and coherence function of wind turbulence relative to a moving vehicle under crosswinds. J. Wind Eng. Ind. Aerodyn. 2019, 188, 384–396. [Google Scholar] [CrossRef]
- Yu, M.; Liu, J.; Liu, D.; Chen, H.; Zhang, J. Investigation of aerodynamic effects on the high-speed train exposed to longitudinal and lateral wind velocities. J. Fluids Struct. 2016, 61, 347–361. [Google Scholar] [CrossRef]
- Wu, M.X.; Li, Y.L.; Chen, X.Z.; Hu, P. Wind spectrum and correlation characteristics relative to vehicles moving through cross wind field. J. Wind Eng. Ind. Aerodyn. 2014, 133, 92–100. [Google Scholar] [CrossRef]
- Su, Y.; Li, M.S.; Yang, Y.; Mann, J.; Liao, H.; Li, X. Experimental investigation of turbulent fluctuation characteristics observed at a moving point under crossflows. J. Wind Eng. Ind. Aerodyn. 2020, 197, 104079. [Google Scholar] [CrossRef]
- Balzer, L.A. Atmospheric turbulence encountered by high-speed ground transport vehicles. J. Mech. Eng. Sci. 1977, 19, 227–235. [Google Scholar] [CrossRef]
- Kármán, T.V. Progress in the statistical theory of turbulence. Physics 1948, 34, 530–539. [Google Scholar] [CrossRef]
- Bullen, H.I. Gusts at low altitude in North Africa. R. Aircr. Establ. Tech. Note Struct. 1961, 304, 1–10. [Google Scholar]
- Cheng, W.C. On the value of the von Kármán constant in the atmospheric surface layers over urban surfaces. J. Wind Eng. Ind. Aerodyn. 2023, 241, 105547. [Google Scholar] [CrossRef]
- Sharma, M.K.; Verma, M.K.; Chakraborty, S. On the energy spectrum of rapidly rotating forced turbulence. Phys. Fluids. 2018, 30, 115102. [Google Scholar] [CrossRef]
- Jakobsen, J.B. Span-wise structure of lift and overturning moment on a motionless bridge girder. J. Wind. Eng. Ind. Aerodyn. 1997, 69–71, 795–805. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mean Wind Speed (m/s) | Turbulence Integral Scale | Turbulence Intensity | ||||
|---|---|---|---|---|---|---|
| Lu (m) | Lv (m) | Lw (m) | Iu (%) | Iv (%) | Iw (%) | |
| 7.770 | 0.685 | 0.245 | 0.217 | 8.634 | 7.757 | 6.944 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duan, Q. Wind Speed Spectrum of a Moving Vehicle under Turbulent Crosswinds. Appl. Sci. 2023, 13, 12054. https://doi.org/10.3390/app132112054
Duan Q. Wind Speed Spectrum of a Moving Vehicle under Turbulent Crosswinds. Applied Sciences. 2023; 13(21):12054. https://doi.org/10.3390/app132112054
Chicago/Turabian StyleDuan, Qingsong. 2023. "Wind Speed Spectrum of a Moving Vehicle under Turbulent Crosswinds" Applied Sciences 13, no. 21: 12054. https://doi.org/10.3390/app132112054
APA StyleDuan, Q. (2023). Wind Speed Spectrum of a Moving Vehicle under Turbulent Crosswinds. Applied Sciences, 13(21), 12054. https://doi.org/10.3390/app132112054