
Research on a Decoupling Algorithm for the Dual-Deformable-Mirrors Correction System

Abstract
:1. Introduction
2. Principle of Wavefront Correction with Dual Deformable Mirrors
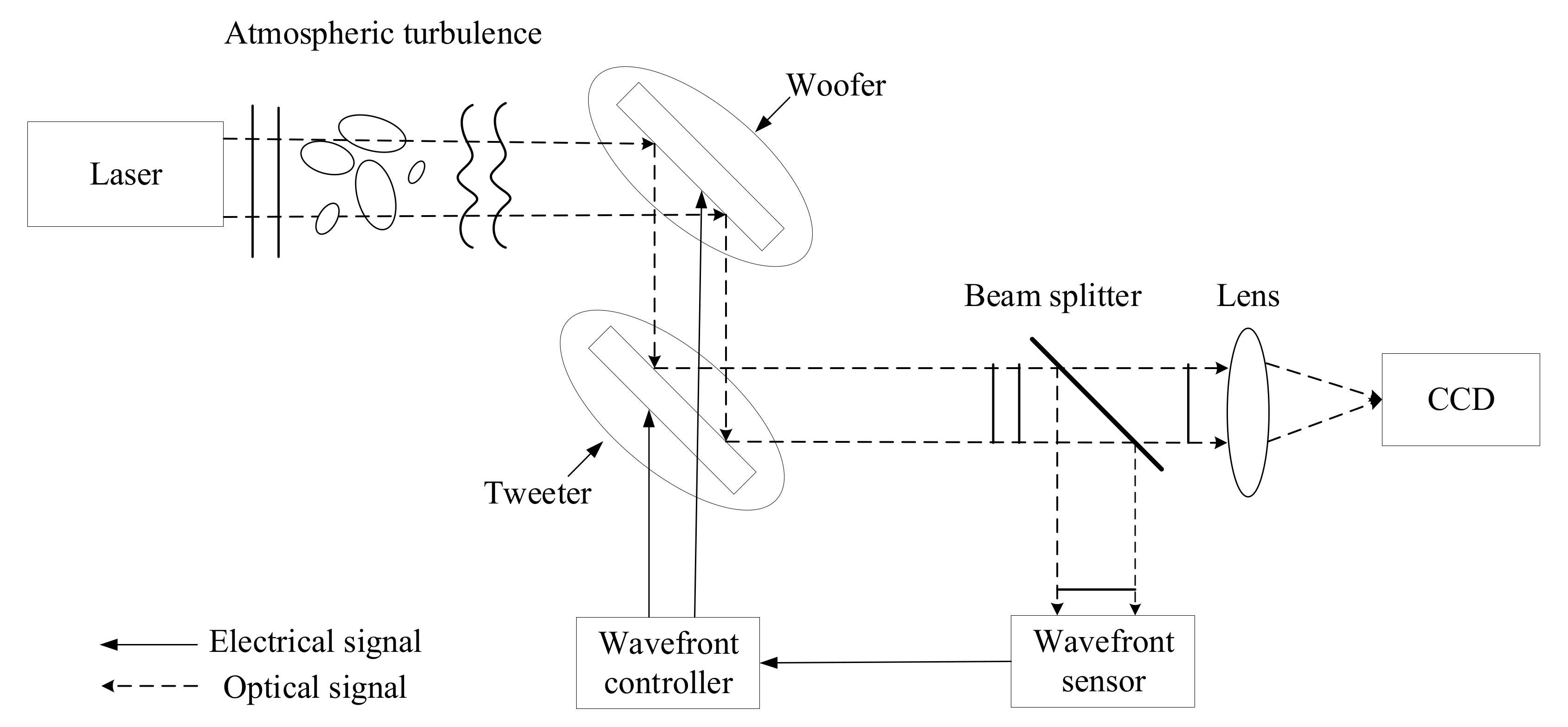
2.1. Principle of Dual-Deformable-Mirrors Correction System
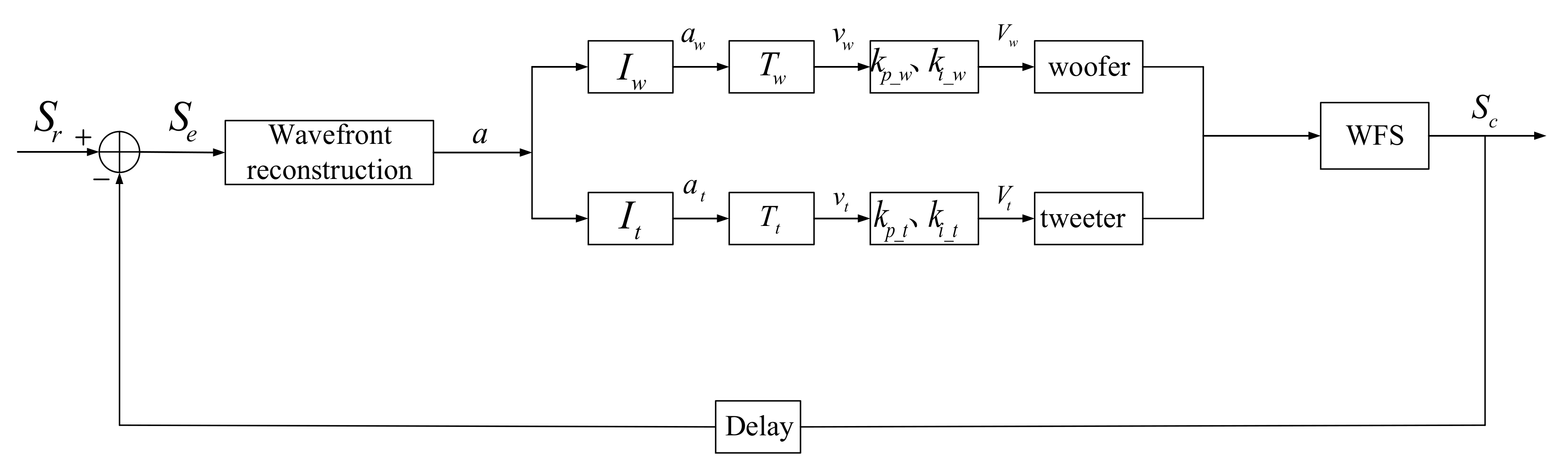
2.2. Principle of Separation Coefficient Algorithm
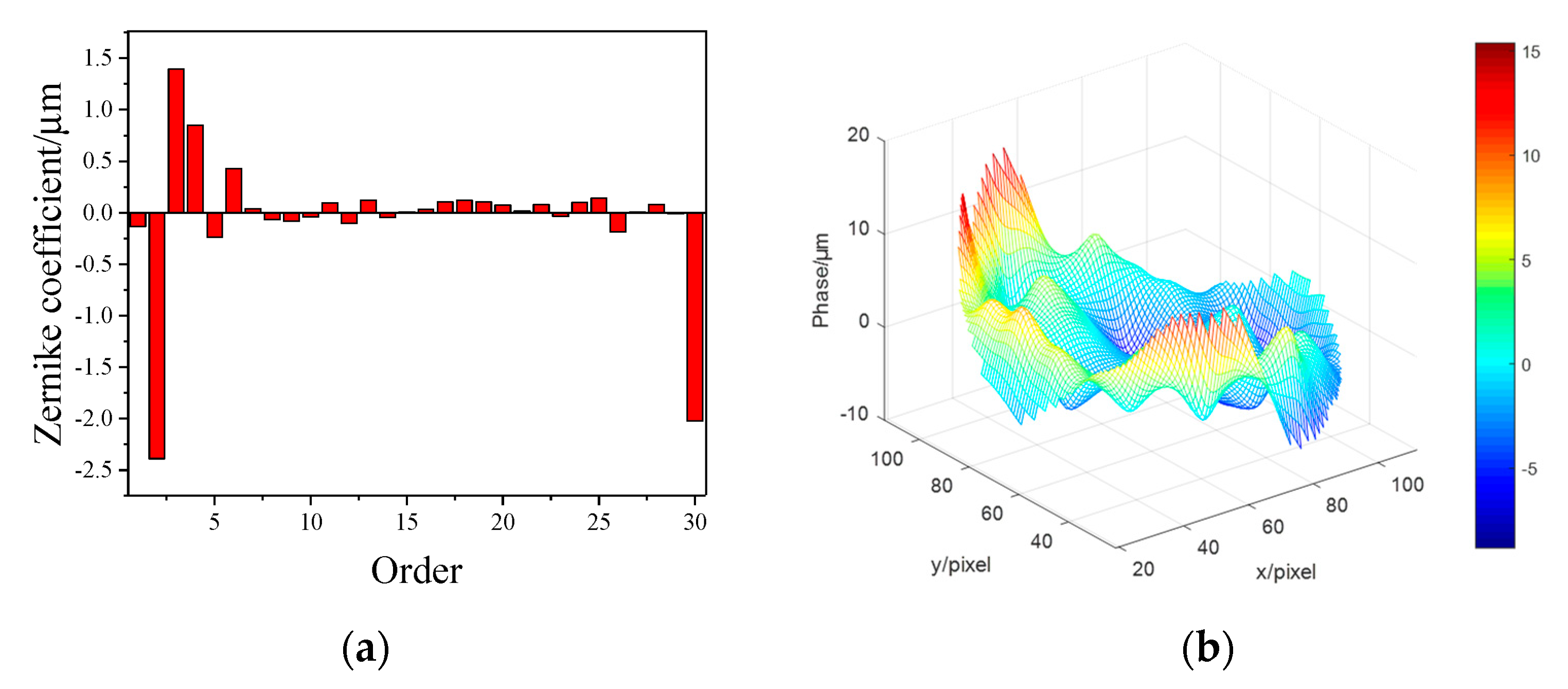
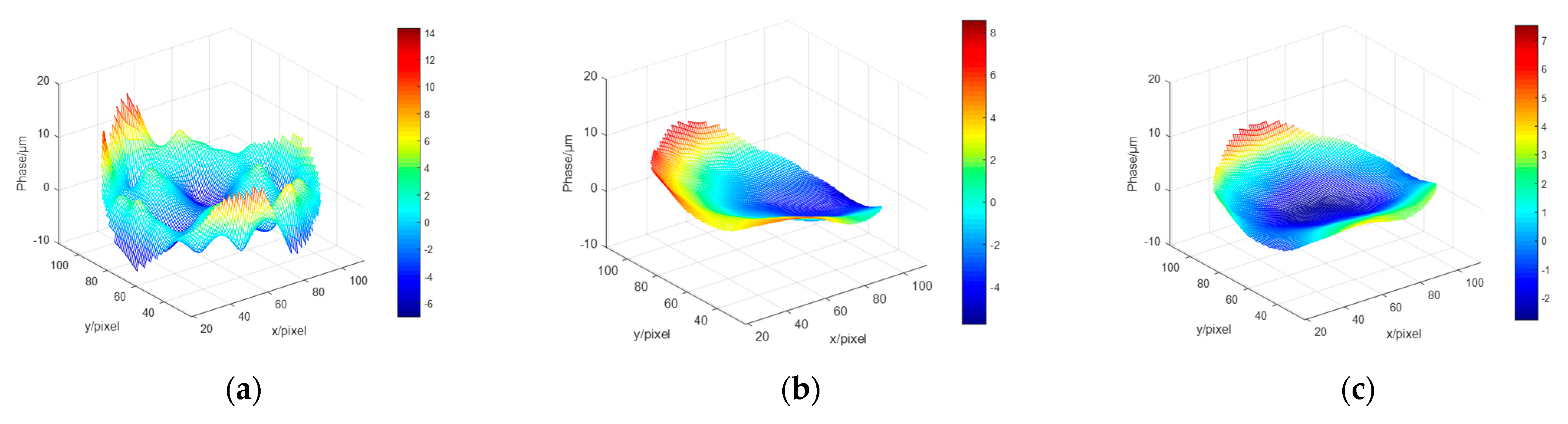
3. Numerical Simulation Analysis
4. Experimental Research
5. Coupling Analysis
6. Conclusions
- (1)
- The utilization of a typical dual-deformable-mirrors wavefront correction system can achieve independent correction of various order aberrations and targeted correction of specific aberrations in different scenes, effectively suppressing the coupling effect between deformable mirrors.
- (2)
- The algorithm studied in this paper is simple and feasible, and it has been verified that the algorithm can be applied to the feasibility of the dual-deformable-mirrors wavefront correction system with a wavefront sensor. This research holds great practical significance in engineering and provides an important reference basis for its practical applications.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclatures
| FSM | Fast-steering mirror |
| DM | Deformable mirror |
| Woofer | FSM or a large stroke, low spatial-frequency DM |
| Tweeter | a 69-unit DM or a small stroke, high spatial-frequency DM |
| PV | Peak-to-Valley |
| RMS | Root-Mean-Square |
| NOP | Numerical Orthogonal Polynomials |
| PI | Proportional Integral |
References
- Gerard, B.L.; Dillon, D.; Cetre, S.; Jensen-Clem, R. First laboratory demonstration of real-time multi-wavefront sensor single conjugate adaptive optics. SPIE 2023, 12680, 570–576. [Google Scholar]
- Liu, W.; Dong, L.; Yang, P.; Xu, B. Zonal decoupling algorithm for dual deformable mirror adaptive optics system. Chin. Opt. Lett. 2016, 14, 020101–020105. [Google Scholar]
- Sivokon, V.P.; Vorontsov, M.A. High-resolution adaptive phase distortion suppression based solely on intensity information. J. Opt. Soc. Am. A 1998, 15, 234–247. [Google Scholar] [CrossRef]
- Liu, W.; Dong, L.; Yang, P.; Lei, X.; Yan, H.; Xu, B. A Zernike mode decomposition decoupling control algorithm for dual deformable mirrors adaptive optics system. Opt. Express 2013, 21, 23885–23895. [Google Scholar] [CrossRef] [PubMed]
- Zhao, W.; Zhao, M.; Wang, S.; Yang, P. Influence of near ground phase vortex on correction of adaptive optics. Chin. J. Quantum Electron. 2020, 37, 466–476. [Google Scholar]
- Cheng, T.; Liu, W.; Pang, B.; Yang, P.; Xu, B. A slope-based decoupling algorithm to simultaneously control dual deformable mirrors in a woofer–tweeter adaptive optics system. Chin. Phys. B 2018, 27, 1–9. [Google Scholar] [CrossRef]
- Kong, L.; Cheng, T.; Yang, P.; Wang, S.; Yang, C.; Zhao, M. Decoupling control algorithm based on numerical orthogonal polynomials for a woofer-tweeter adaptive optics system. Opt. Express 2021, 29, 22331–22344. [Google Scholar] [CrossRef] [PubMed]
- Yang, S.; Ke, X. Experimental study on adaptive optical wavefront correction with dual mirrors in free space optical communication. Optik 2021, 242, 1–12. [Google Scholar] [CrossRef]
- Liu, W.; Xv, B.; Sun, W. Decoupling Control Algorithm Used for Wave Front Sensor-Free Adaptive Optics System with Dual Deformable Mirrors Based on Mode Project-Constraint. Chin. J. Lasers 2023, 50, 106–112. [Google Scholar]
- Zou, W.; Qi, X.; Burns, S.A. Woofer-tweeter adaptive optics scanning laser ophthalmoscopic imaging based on Lagrange-multiplier damped least-squares algorithm. Biomed. Opt. Express 2011, 2, 1986–2004. [Google Scholar] [CrossRef] [PubMed]
- Hu, M. A Review of Simulation Methods for the Optical Wavefront Distorted by Atmospheric Turbulence. Opt. Optoelectron. Technol. 2003, 1, 10–12. [Google Scholar]
- Yang, W.; Wang, J.; Wang, B. A method used to improve the dynamic range of Shack–Hartmann wavefront sensor in presence of large aberration. Sensors 2022, 22, 7120–7134. [Google Scholar] [CrossRef] [PubMed]
- Noll, R.J. Zernike polynomials and atmospheric turbulence. J. Opt. Soc. Am. 1976, 66, 207–211. [Google Scholar] [CrossRef]
- Hu, Z.; Jiang, W. Simulation of the Optical Wavefront Distorted by Atmospheric Turbulence. Opto-Electron. Eng. 1995, 22, 50–56. [Google Scholar]
- Xv, C.; Hao, S.; Wang, Y.; Zhao, Q.; Liu, Y. Atmospheric Turbulence Distortion Wave-Front Reconstruction Based on Modal Mutual Information. J. Air Force Eng. Univ. 2020, 21, 65–70. [Google Scholar]
- Wu, Y. Application Research of Adaptive Optics Technique in Atmospheric Optical Communications; Graduate School of Chinese Academy of Sciences (Institute of Optoelectronics Technology): Beijing, China, 2013. [Google Scholar]
- Wu, J. The Beauty of Mathematics in Computer Science; Posts and Telecommunications Press: Beijing, China, 2012. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i | (n, m) | Polar Coordinates | Cartesian Coordinates | Aberration Type |
|---|---|---|---|---|
| 1 | (0, 0) | 1 | 1 | Piston |
| 2 | (1, 1) | 2x | X-direction Tilt | |
| 3 | (1, −1) | 2y | Y-direction Tilt | |
| 4 | (2, 0) | Defocus | ||
| 5 | (2, −2) | Y-direction Coma | ||
| 6 | (2, 2) | X-direction Coma | ||
| 7 | (3, −1) | Y-direction Astigmatism | ||
| 8 | (3, 1) | X-direction Astigmatism | ||
| 9 | (3, −3) | Trefoil Aberration | ||
| 10 | (3, 3) | Trefoil Aberration | ||
| 11 | (4, 0) | Spherical Aberration | ||
| 12 | (4, 2) | |||
| 13 | (4, −2) | |||
| 14 | (4, 4) | Quatrefoil Aberration | ||
| 15 | (4, −4) | Quatrefoil Aberration |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, J.; Wang, H.; Han, M.; Ke, X. Research on a Decoupling Algorithm for the Dual-Deformable-Mirrors Correction System. Appl. Sci. 2023, 13, 12112. https://doi.org/10.3390/app132212112
Liang J, Wang H, Han M, Ke X. Research on a Decoupling Algorithm for the Dual-Deformable-Mirrors Correction System. Applied Sciences. 2023; 13(22):12112. https://doi.org/10.3390/app132212112
Chicago/Turabian StyleLiang, Jingyuan, Hairong Wang, Meimiao Han, and Xizheng Ke. 2023. "Research on a Decoupling Algorithm for the Dual-Deformable-Mirrors Correction System" Applied Sciences 13, no. 22: 12112. https://doi.org/10.3390/app132212112
APA StyleLiang, J., Wang, H., Han, M., & Ke, X. (2023). Research on a Decoupling Algorithm for the Dual-Deformable-Mirrors Correction System. Applied Sciences, 13(22), 12112. https://doi.org/10.3390/app132212112