
Designing Automated Logistics Warehouse Stackable Bidirectional Infinite-Loop Modules

Abstract
:1. Introduction
2. Literature Review
3. Materials and Methods
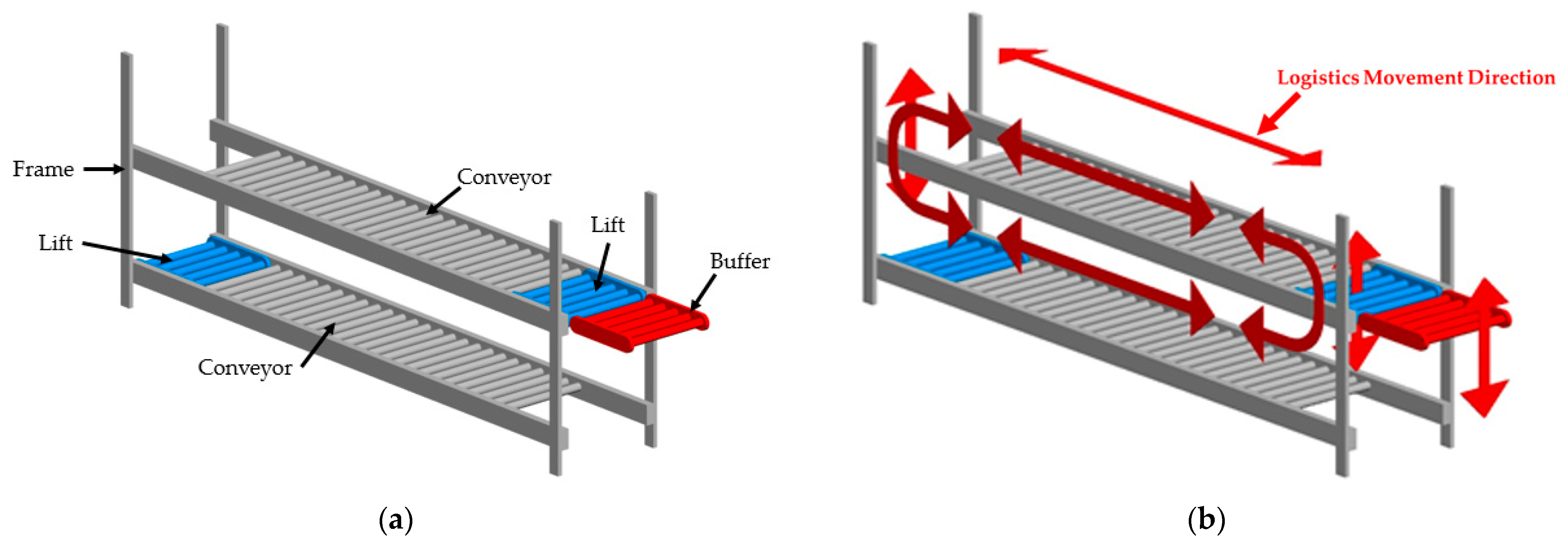
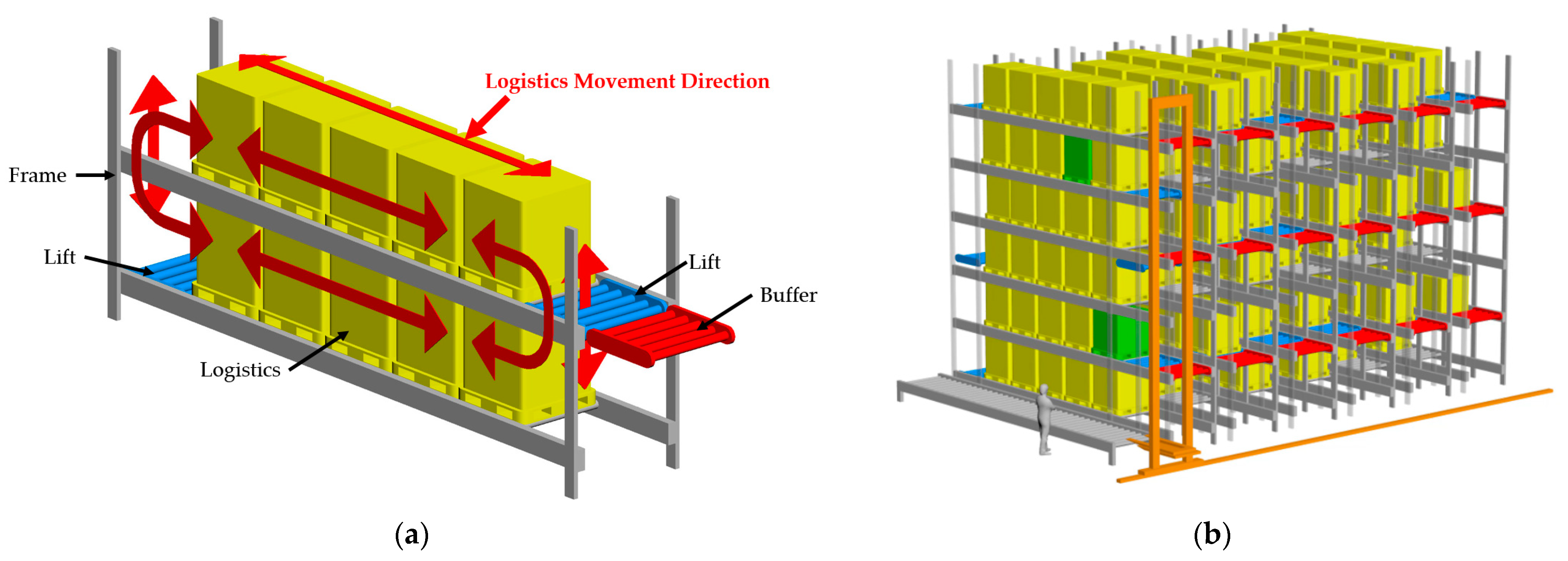
3.1. Stackable Bidirectional Infinite-Loop Module Concept
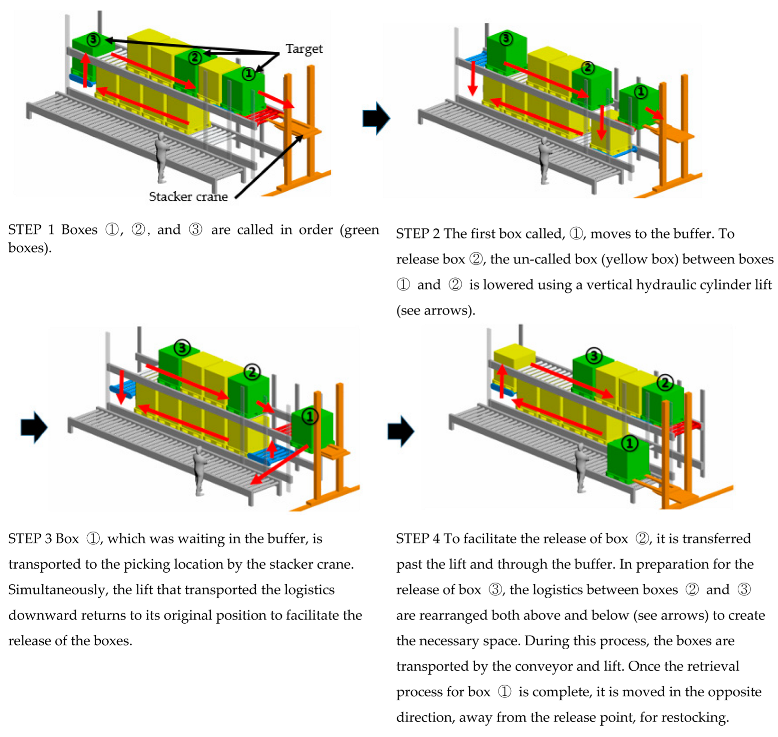
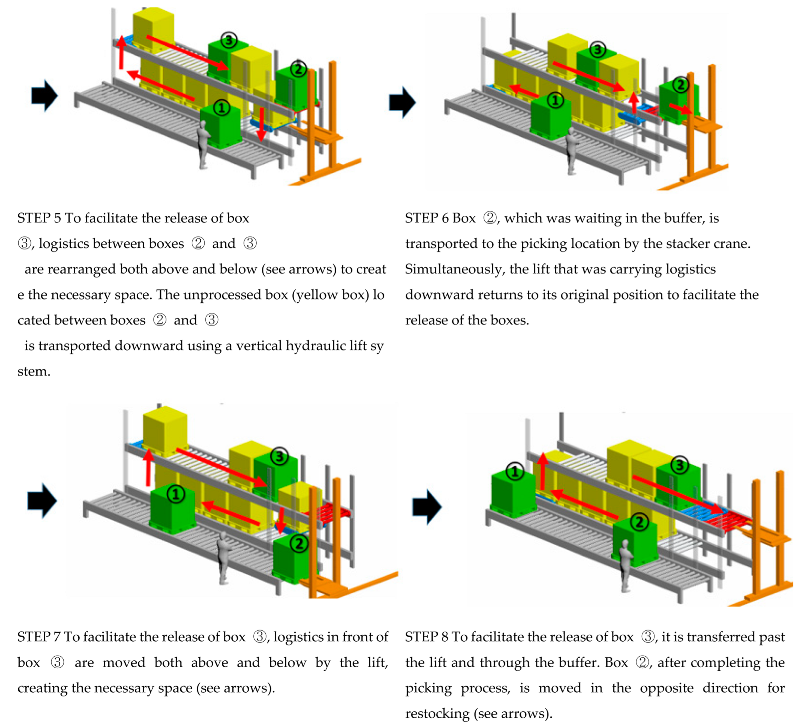
3.2. Operation of Stackable Bidirectional Infinite-Loop Module
3.3. Pre-Transfer System
4. Experimental Design
4.1. Simulation
4.1.1. Current and Target Settings
- As-is fork liftGeneral logistics storage warehouse where logistics are transported using forklifts. There is a gap between the racks through which forklifts can travel;
- As-is stacker craneAutomated logistics warehouses use stacker cranes for logistics transportation. The racks were arranged so that the stacker cranes could travel through them;
- To-be stacker craneThe proposed automated logistics warehouse, in which logistics are transported to workers through a conveyer and stacker crane, eliminates the gap between the racks.
4.1.2. Experimental Design
- First experimentThe experiment was repeated 250 times, assuming that the number of logistics to be called was 100 PLT, and that one PLT was released in a first-in, first-out order;
- Subsequent experimentsThe experiment was conducted 250 times for 300, 600, 1000, and 1800 PLT logistics called. Logistics involve products that have a variety of small quantities and frequent outputs. The products to be called were tested such that they were released in order by random call or first-in, first-out.
4.2. Process Design and Implementation
5. Results
5.1. Experimental Results of Balanced Inventory Logistics
5.2. Experimental Results Using Virtual Bottleneck Phenomenon in Inventory Logistics
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Statistics Korea. Economic Statistics Bureau; Service Industry Trends Division. In Online Shopping Trends; Statistics Korea: Daejeon, Republic of Korea, 2019. [Google Scholar]
- Berg, J.P.V.; Zijm, W.H.M. Models for warehouse management: Classification and examples. Int. J. Prod. Econ. 1999, 59, 519–528. [Google Scholar] [CrossRef]
- Jo, Y.H.; Choi, C. A study on the architectural changes of the logistics center due to automation and enlargement—Focusing on the case of Coupang, E-Mart, Amazon Logistics Centers. J. Archit. Inst. Korea Plan. Des. 2020, 36, 37–48. [Google Scholar]
- Chun, S.J.; Lee, Y.H. Travel time models for automated storage/retrieval systems with racks of different size. J. Korean Inst. Ind. Eng. 1997, 23, 421–432. [Google Scholar]
- Kim, O.T.; Yu, D.S.; Yu, Y.S.; Park, J.H. Trends in conveyance and storage equipment technology in smart logistics centers. Mag. IEIE 2012, 39, 59–68. [Google Scholar]
- Scherer, R.J.; Schapke, S.-E. A distributed multi-model-based management information system for simulation and decision-making on construction projects. Adv. Eng. Inform. 2011, 25, 582–599. [Google Scholar] [CrossRef]
- Hana Securities Co., Ltd. Should You Invest in Logistics Robots Now? 2023. Available online: https://www.hanaw.com/download/research/FileServer/WEB/industry/industry/2023/05/12/230512_AMR_industry.pdf (accessed on 15 August 2023).
- Jang, Y.S.; Lee, B.L.; Lee, H.C. A simulation study on performance improvement of the military AS/RS based travel time of S/R machine. J. Mil. Oper. Res. Soc. Korea 2009, 35, 63–76. [Google Scholar]
- Hwang, E.S.; Baek, S.W. A study on the optimal design of an automated military logistics center using simulation and hierarchical analysis method. J. Korea Acad. Ind. Coop. Soc. 2014, 15, 725–734. [Google Scholar]
- Kim, J.; Kim, Y.; Lee, H. Simulation analysis of AGV in convenience store distribution logistics centers. J. Korea Acad. Ind. Coop. Soc. 2016, 17, 61–69. [Google Scholar]
- Lee, J. Trends in the automated logistics equipment market and domestic perception survey. In Logistics Trends of East Asia; Busan Development Institute: Busan, Republic of Korea, 2015; pp. 92–101. [Google Scholar]
- Barman, A.; Das, R.; De, P.K. Optimal pricing, replenishment scheduling, and preservation technology investment policy for multi-item deteriorating inventory model under shortages. Int. J. Model. Simul. Sci. Comput. 2021, 12, 2150039. [Google Scholar] [CrossRef]
- Barman, A.; Chakraborty, A.K.; Goswami, A.; Banerjee, P.; De, P.K. Pricing and inventory decision in a two-layer supply chain under the weibull distribution product deterioration: An application of NSGA-II. RAIRO-Oper. Res. 2023, 57, 2279–2300. [Google Scholar] [CrossRef]
- Lee, D.; Chang-wook, L.; Sun-geun, K. A study of platent network comparative analysis Base on International Patent Classification Code: Focusing on ‘smart farm’ in Korea, the United States, and Japan. Asia-Pac. J. Multimed. Serv. Converg. Art Humanit. Sociol. 2018, 8, 43–51. [Google Scholar]
- Asseng, S.; Guarin, J.R.; Raman, M.; Monje, O.; Kiss, G.; Despommier, D.D.; Meggers, F.M.; Gauthier, P.P.G. Wheat yield potential in controlled-environment vertical farms. Proc. Natl. Acad. Sci. USA 2020, 117, 19131–19135. [Google Scholar] [CrossRef] [PubMed]
- Muther, R. Systematic Layout Planning; Cahners Publishing: Boston, MA, USA, 1973; p. 12. [Google Scholar]
- Gu, J.; Goetschalckx, M.; McGinnis, L.F. Research on warehouse operation: A comprehensive review. Eur. J. Oper. Res. 2007, 177, 1–21. [Google Scholar] [CrossRef]
- Jo, G.-S.; Lee, D.-W.; Lee, Y.-J.; Kim, H.-G. A study on the operational efficiency improvement of refrigerated warehousing systems in the Busan area. In Proceedings of the Korean Institute of Industrial Engineers Fall Conference, Jeju, Republic of Korea, 12 June 2010; pp. 879–883. [Google Scholar]
- Song, I.-S.; Cho, N.-U. Prediction-based optimal storage location decision model for logistics management system. J. Korean SCM Soc. 2015, 15, 7–17. [Google Scholar]
- Montulet, P.; Langevin, A.; Riopel, D. Minimizing the peak load: An alternate objective for dedicated storage policies. Int. J. Prod. Res. 1998, 36, 1369–1385. [Google Scholar] [CrossRef]
- Lee, M.-K. A storage assignment policy in a man-on-board automated storage/retrieval system. Int. J. Prod. Res. 1992, 30, 2281–2292. [Google Scholar] [CrossRef]
- Brynzér, H.; Johansson, M.I. Storage location assignment: Using the product structure to reduce order picking times. Int. J. Prod. Econ. 1996, 46–47, 595–603. [Google Scholar] [CrossRef]
- van Oudheusden, D.L.; Zhu, W. Storage Layout of AS/RS Racks Based on Recurrent Orders. Eur. J. Oper. Res. 1992, 58, 48–56. [Google Scholar] [CrossRef]
- Liu, C.H.; Lu, L.Y. The procedure of determining the order picking strategies in distribution center. Int. J. Prod. Econ. 1999, 60–61, 301–307. [Google Scholar]
- Dubey, V.K.; Veeramani, D.A. Framework for sizing an automated distribution center in a retail supply chain. Simul. Model. Pract. Theory 2017, 75, 113–126. [Google Scholar] [CrossRef]
- Hwang, J.; Lee, I.; Kim, H.; JungChoi, K.; Bahk, J.; Jung, M. Analysis of task and postures of retail grocery store workers. IE Interfaces 2011, 24, 387–395. [Google Scholar] [CrossRef]
- Jarvis, J.M.; McDowell, E.D. Optimal product layout in an order picking warehouse. IIE Trans. 1991, 23, 93–102. [Google Scholar] [CrossRef]
- Le-Duc, T.; De Koster, M.B.M. Determining Number of Zones in a Pick-and-Pack Order Picking System; Erasmus Research Institute of Management: Rotterdam, The Netherlands, 2005. [Google Scholar]
- Hong, J.H.; Seo, K.; Kim, T.G. Simulation-based optimization for design parameter exploration in hybrid system: A defense system example. Simulation 2013, 89, 362–380. [Google Scholar] [CrossRef]
- Choi, S.K. A Study on the Implementation of Vertical Tray Conveyor System in Multi-Layered Logistics Centers Based on Simulation. Ph.D. Dissertation, Korea Maritime and Ocean University, Busan, Republic of Korea, 2014. [Google Scholar]
- Kempfer, L. Top 5 Reasons to Use Warehouse Simulation Softwar eMaterial Handling Management. Available online: https://www.mhlnews.com/technology-automation/article/22038532/top-5-reasons-to-use-warehouse-simulation-software (accessed on 11 February 2023).
- Park, T.; Nam, J.-H.; Kim, T.-S.; Ryu, K.-R. Multi-objective cooperative resonance algorithm for reorganization of equipment yard in automated container terminal. J. Korean Inst. Inf. Sci. Appl. 2012, 39, 45–55. [Google Scholar]
- Jung, S.I.; Kim, E.T. Study on real-time task assignment in a multiple AGV system. In Proceedings of the Control, Robotics, and Systems Symposium, Barcelona, Spain, 18–22 April 2005; pp. 551–556. [Google Scholar]
- Hausman, W.H.; Schwarz, L.B.; Graves, S.C. Optimal storage assignment in automatic warehousing systems. Manag. Sci. 1976, 22, 629–638. [Google Scholar] [CrossRef]
- Graves, S.C.; Hausman, W.H.; Schwarz, L.B. Storage-retrieval interleaving in automatic warehousing systems. Manag. Sci. 1977, 23, 935–945. [Google Scholar] [CrossRef]
- Bozer, Y.A.; White, J.A. Travel-time models for automated storage/retrieval systems. IIE Trans. 1984, 16, 329–338. [Google Scholar] [CrossRef]
- Chen, Z.; Guo, W.; Wang, Y.; Zhang, S. A Simulation model for an automated storage and retrieval system in a vertical farm. Comput. Electron. Agric. 2021, 172, 105595. [Google Scholar]
- Lee, S.; Lee, S.; Park, J. Automated storage and retrieval system for a vertical farm. Int. J. Precis. Eng. Manuf. 2020, 21, 2179–2186. [Google Scholar]
- Cho, Y.H.; Lee, J.M.; Cho, S.H. A novel automated storage and retrieval system for vertical farming: A simulation-based approach. Comput. Ind. Eng. 2022, 179, 104144. [Google Scholar]
- Li, Z.-Q.; Zhang, Y.-Q.; Wang, Z.-Y. A design and implementation of a vertical farming automated storage and retrieval system. Robot. Comput. Integr. Manuf. 2022, 75, 102529. [Google Scholar]
- Cho, S.H.; Kim, K.S.; Jung, J.H. An automated storage and retrieval system for vertical farming using a mixed-integer programming model. Comput. Ind. Eng. 2021, 165, 106793. [Google Scholar]
- Wang, Y.; Wang, X.; Li, Y. Design of automated storage and retrieval systems for vertical farming using a genetic algorithm. J. Manuf. Syst. 2021, 44, 101809. [Google Scholar]
- Wang, G.; Zhang, F.; Cheng, B.; Fang, F. DAMER: A novel diagnosis aggregation method with evidential reasoning rule for bearing fault diagnosis. J. Intel. Manuf. 2021, 32, 1–20. [Google Scholar] [CrossRef]
- Roodbergen, K.J.; Vis, I.F.A. A survey of literature on automated storage and retrieval systems. Eur. J. Oper. Res. 2009, 194, 343–362. [Google Scholar] [CrossRef]
- De Koster, R.; Le-Duc, T.; Roodbergen, K.J. Design and control of warehouse order picking: A literature review. Eur. J. Oper. Res. 2007, 182, 481–501. [Google Scholar] [CrossRef]
- Vasili, M.R.; Tang, S.H.; Vasili, M. Automated storage and retrieval systems: A review on travel time models and control policies. In Warehousing in the Global Supply Chain: Advanced Models, Tools and Applications for Storage Systems; Springer: Berlin/Heidelberg, Germany, 2012; pp. 159–209. [Google Scholar]
- Wang, J.; Liu, J.; Zhao, Z.; Zhao, G. A task recommendation framework for heterogeneous mobile crowdsensing. J. Supercomput. 2021, 77, 12121–12142. [Google Scholar] [CrossRef]
- Statistics Korea. Population Age Structure of Working Age and Elderly Population, 2017–2067. 2019. Available online: http://sti.kostat.go.kr/window/2019a/main/2019_sum_8.html (accessed on 3 September 2023).
- Yang, X.; Chen, Y.; Li, X.; Zhang, Y. A novel reload method for a three-dimensional automated warehouse. IEEE Trans. Automat. Sci. Eng. 2022, 3, 31–42. [Google Scholar]
- Rüdel, M.O.; Ganser, J.; Weller, R.; Zachmann, G. Unrealhaptics: A plugin-system for high fidelity haptic rendering in the unreal engine. In Proceedings of the Virtual Reality and Augmented Reality: 15th EuroVR International Conference, EuroVR 2018, London, UK, 22–23 October 2018; Springer International Publishing: Berlin/Heidelberg, Germany, 2018; pp. 128–147. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rack Composition &Transfer Types * | Rack Columns | Rack Rows | Rack Tiers | Bay Width (m) | Bay Depth (m) | Bay Height (m) |
|---|---|---|---|---|---|---|
| As-is forklift | 20 | 30 | 3 | 50 | 1.1 | 7.5 |
| As-is stacker crane | 6 | 30 | 10 | 50 | 1.1 | 21.75 |
| To-be stacker crane | ||||||
| Logistics specifications | Depth: 1.1 m, Width: 1.1 m, Height: 1~1.6 m | Logistics Call Quantity | Max 1800 PLT | |||
| Number of logistics storage items | 1 | Rack Logistics Storage Method | Free Location | |||
| Equipment | Horizontal Movement Speed | Vertical Movement Speed | ||||
|---|---|---|---|---|---|---|
| Min | Max | Avg | Min | Max | Avg | |
| Stacker crane | 30 | 180 | 60 | 4 | 70 | 30 |
| Conveyor (stack, transport) | 40 | 90 | 50 | - | - | - |
| Lift (transport, module) | - | - | - | 6 | 60 | 45 |
| Fork lift | 8 | 20 | 15 | 4 | 8 | 6 |
| Inbound | Outbound | Ratio | |
|---|---|---|---|
| Distribution of logistics movement | 1800 PLT | 1800 PLT | 5:5 (equal) |
| 1080 PLT | 2520 PLT | 3:7 (inbound < outbound) | |
| 2520 PLT | 1080 PLT | 7:3 (inbound > outbound) | |
| Total flow | Max 1800 PLT | Logistics call method | Random call based on first-in-first-out (FIFO) |
| Picking ratio | 100% | In/outbound cycle | Single mode |
| Command processing method | Single command |
| Logistics Shipment Quantity (PLT) | Average Time (s) | Average Time (h) | |
|---|---|---|---|
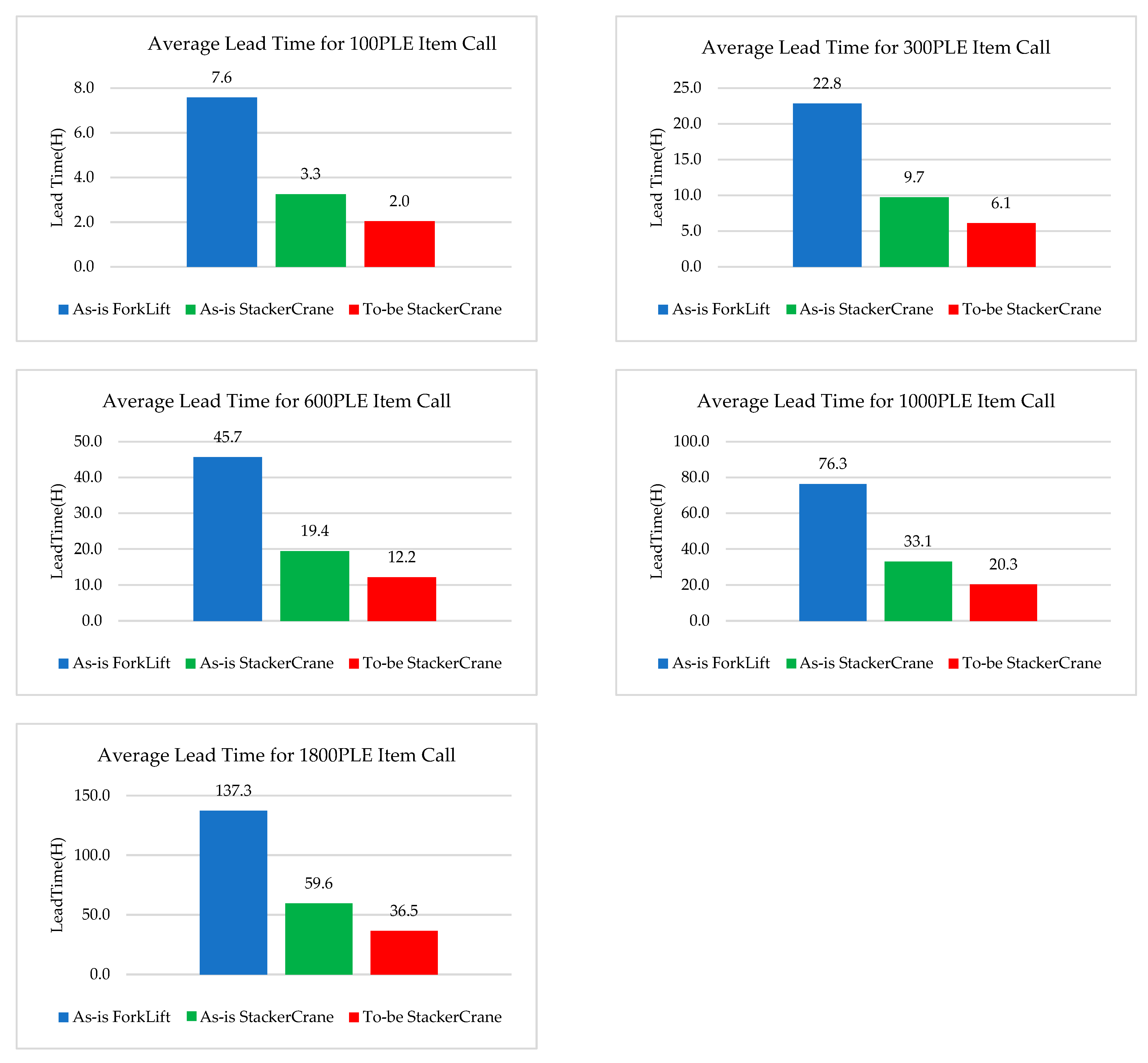
| 100 | As-is fork lift | 27,284.63 | 7.58 |
| As-is stacker crane | 11,704.66 | 3.25 | |
| To-be stacker crane | 7330.62 | 2.03 | |
| 300 | As-is fork lift | 82,156.09 | 22.82 |
| As-is stacker crane | 35,029.83 | 9.73 | |
| To-be stacker crane | 21,935.43 | 6.09 | |
| 600 | As-is fork lift | 164,489.20 | 45.69 |
| As-is stacker crane | 69,972.45 | 19.43 | |
| To-be stacker crane | 43,752.13 | 12.15 | |
| 1000 | As-is fork lift | 274,748.71 | 76.32 |
| As-is stacker crane | 119,241.88 | 33.12 | |
| To-be stacker crane | 73,041.91 | 20.28 | |
| 1800 | As-is fork lift | 494,373.59 | 137.32 |
| As-is stacker crane | 214,393.35 | 59.55 | |
| To-be stacker crane | 131,518.45 | 36.53 | |
| Logistics Shipment Quantity (PLT) | Average Time (h) | |||
|---|---|---|---|---|
| 3:7 | 7:3 | 5:5 | ||
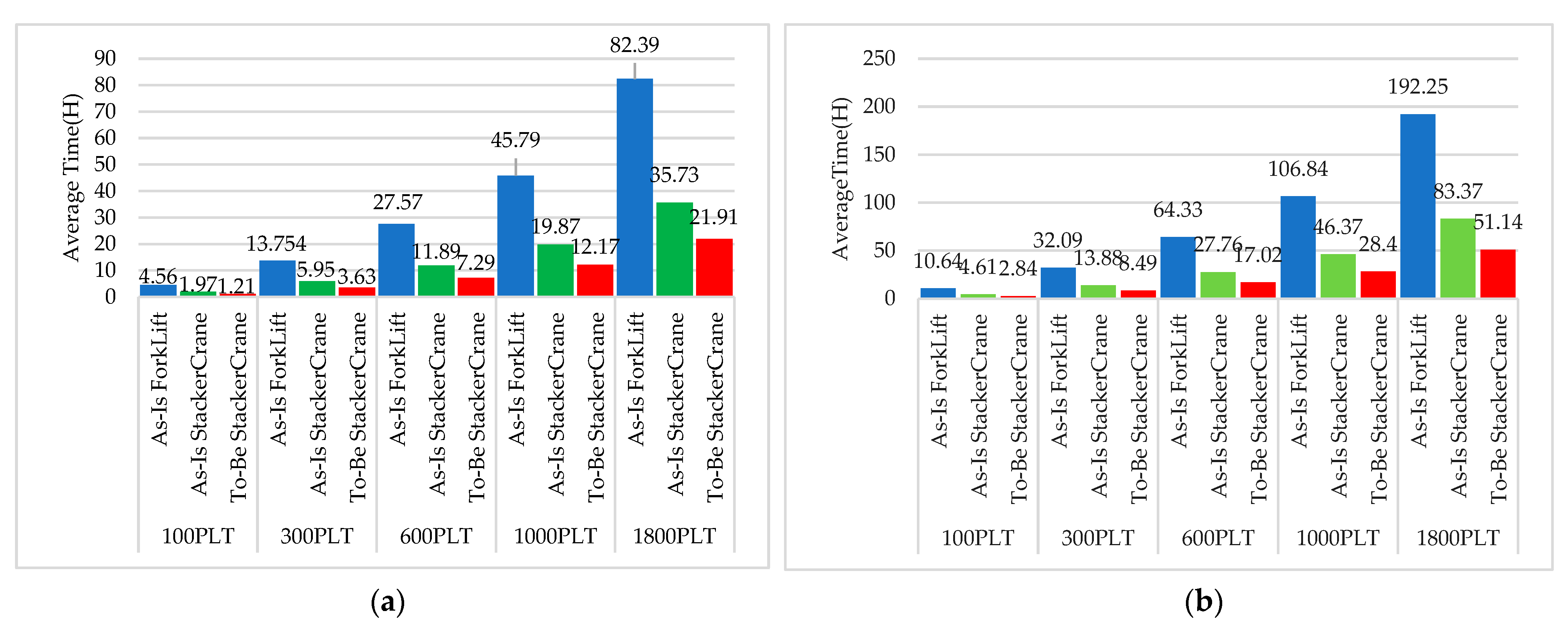
| 100 | As-is fork lift | 4.56 | 10.64 | 7.58 |
| As-is stacker crane | 1.97 | 4.61 | 3.25 | |
| To-be stacker crane | 1.21 | 2.84 | 2.03 | |
| 300 | As-is fork lift | 13.75 | 32.09 | 22.82 |
| As-is stacker crane | 5.95 | 13.88 | 9.73 | |
| To-be stacker crane | 3.63 | 8.49 | 6.09 | |
| 600 | As-is fork lift | 27.57 | 64.33 | 45.69 |
| As-is stacker crane | 11.89 | 27.76 | 19.43 | |
| To-be stacker crane | 7.29 | 17.02 | 12.15 | |
| 1000 | As-is fork lift | 45.79 | 106.84 | 76.32 |
| As-is stacker crane | 19.87 | 46.37 | 33.12 | |
| To-be stacker crane | 12.17 | 28.40 | 20.28 | |
| 1800 | As-is fork lift | 82.39 | 192.25 | 137.32 |
| As-is stacker crane | 35.73 | 83.37 | 59.55 | |
| To-be stacker crane | 21.91 | 51.14 | 36.53 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Min, K.; Lim, D. Designing Automated Logistics Warehouse Stackable Bidirectional Infinite-Loop Modules. Appl. Sci. 2023, 13, 12472. https://doi.org/10.3390/app132212472
Min K, Lim D. Designing Automated Logistics Warehouse Stackable Bidirectional Infinite-Loop Modules. Applied Sciences. 2023; 13(22):12472. https://doi.org/10.3390/app132212472
Chicago/Turabian StyleMin, Kyoungsoon, and Daeeun Lim. 2023. "Designing Automated Logistics Warehouse Stackable Bidirectional Infinite-Loop Modules" Applied Sciences 13, no. 22: 12472. https://doi.org/10.3390/app132212472