Abstract
To extract valuable characteristic information from the acoustic radiation signal of rolling bearings, a novel mathematical morphological network (MMNet) is proposed. First, a mathematical morphological network layer is constructed by leveraging the advantages of a multi-scale enhanced top-hat morphological operator (MEAVGH) that can extract positive and negative pulses, which are then integrated into the deep learning network. Second, the input signal undergoes processing with different scale structural elements (SEs) to obtain multi-branch data. This is followed by channel attention and spatial attention mechanism-based weighting of the generated multi-branch data. Finally, the fused information is fed to the neural network to yield the final result. The experimental results demonstrate the efficacy of the proposed method in extracting fault feature information, achieving a fault classification accuracy of 98.56%. Furthermore, the algorithm exhibits robustness and high training efficiency. Comparative analysis reveals that the proposed method outperforms other approaches regarding cluster analysis, accuracy, recall rate, and computational efficiency. These findings further highlight the advantages of MMNet in acoustic signal-based fault diagnosis for rolling bearings.
1. Introduction
Rotating machinery is the predominant equipment type in applied sectors, such as electric power, petrochemicals, metallurgy, aerospace, and other industries. Bearings, being crucial components of these machines, play a particularly significant role in their monitoring and diagnosis [1]. Research findings indicate that rolling bearing failures account for 30% of all rotating machinery failures [2,3,4]. Therefore, fault diagnosis of rolling bearings holds immense importance.
In recent years, there has been a proliferation of fault diagnosis methods for rolling bearings. The research on early fault feature extraction of rolling bearings extensively utilizes wavelet transform, empirical mode decomposition (EMD), and machine learning techniques. He et al. [5] proposed a novel deep neural network by integrating wavelet transform with deep learning techniques, which was successfully applied for fault diagnosis in rolling bearings. Xue et al. [6] employed the combination of empirical wavelet transform and correlation kurtosis for fault diagnosis in rolling bearings. Ding et al. [7] integrated the Markov method with a depth residual network to enhance fault diagnosis of rolling bearings. In a subsequent study, Xue et al. [8] utilized the Markov transition field technique to transform the original vibration signal into a time-dependent image for fault diagnosis in rolling bearings under small sample conditions. The empirical mode decomposition (EMD) method is capable of decomposing the original signal and effectively eliminating Gaussian white noise. Building upon this research, Li et al. [9] proposed a rapid adaptive EMD technique to extract fault features from rolling bearings.
In the field of deep learning, with the rapid advancement of artificial intelligence techniques, convolutional neural networks (CNN) have demonstrated remarkable capabilities in feature extraction and generalization. CNNs excel at processing images and other data types with translation invariance while reducing computational complexity. Over the past few years, numerous researchers have successfully applied CNN networks to mechanical fault diagnosis tasks. For instance, Xu et al. [10] transformed bearing vibration signals into image representations using the continuous wavelet transform. They then developed a deep learning model based on CNN for accurate fault diagnosis of rolling bearings. Wen et al. [11] proposed a novel approach based on LeNet-5 architecture within the CNN framework and achieved high classification accuracy when tested on a motor bearing dataset, self-priming centrifugal pump dataset, and axial piston hydraulic pump dataset. Ye et al. [12] constructed a new deep neural network for feature learning from vibration signals and introduced a kernel selection method to fuse multi-branch features for transmission fault diagnosis. To address the limitations of traditional CNN models under unstable and complex working environments, Xu et al. [13] proposed an improved multi-scale convolutional neural network model integrated with a feature attention mechanism. Subsequently, Zhang et al. [14] combined one-dimensional convolutional neural networks (1DCNN) to propose a research methodology for gearbox-bearing fault diagnosis based on deep learning. The results demonstrate that this proposed method is effective for diagnosing wind turbine gearbox bearing faults. To solve the problem of insufficient global and local attention mechanisms, Jiang et al. [15] proposed an adaptive sparse attention network for bearing fault diagnosis. Aiming at the multi-source information fusion conflict problem of industrial motor bearings, Wang et al. [16] proposed a multi-local decision-making model. Fu et al. [17] proposed a bearing fault diagnosis method based on wavelet denoising and machine learning.
Although the aforementioned methods have yielded favorable outcomes in bearing fault diagnosis, they solely rely on vibration signals for diagnostic purposes. Vibration signals are classified as contact measurements. This may present challenges if the bearing seat material is non-ferromagnetic and cannot be magnetically attached to the unit using a buckle. Moreover, excessive unit vibration may lead to sensor detachment, resulting in unnecessary complications during signal acquisition. Consequently, non-contact measurement methods are gradually being employed in bearing fault diagnosis, with increasing emphasis placed on experts and scholars within the field of fault diagnosis utilizing acoustic radiation signals as a non-contact measurement method [18,19,20].
For acoustic fault diagnosis, Bai et al. [21] successfully achieved weak fault detection of rolling bearings by extracting comprehensive status information from acoustic signals, thereby providing a novel approach for bearing condition monitoring. Glowacz et al. [22] proposed a frequency component shortening method to classify the feature components of acoustic power tool fault diagnosis. He et al. [23] utilized microphone-collected acoustic signals and employed small beamforming enhancement technology for rolling bearing fault diagnosis, ultimately diagnosing train bearing faults. However, due to significant background noise interference in the acoustic radiation signal, effectively filtering the collected signal becomes crucial. In the case of complex mechanical equipment operation, the collected signal contains substantial interference information and exhibits strong non-stationarity. Directly inputting the original collected signal into a neural network would reduce classification accuracy; hence, it is imperative to filter and denoise the acquired sound signal.
Mathematical morphology has been extensively applied in mechanical vibration signal processing, serving as an effective nonlinear and time-varying method for extracting fault characteristic information by directly operating on time domain signals. The mathematical morphology theory has been extensively investigated by scholars. Yan et al. [24] employed grey correlation analysis (GCA) to determine the optimal scale of multi-scale mathematical morphology’s structural element, successfully achieving fault feature extraction for rolling bearings. Li et al. [25] proposed a novel research approach for planetary gearbox fault diagnosis that combines adaptive multi-scale morphological filtering with improved hierarchical arrangement entropy. Numerical and experimental results demonstrate the capability of this method to identify various types of faults in planetary gearboxes. Deng et al. [26] introduced a sparse envelope spectrum evaluation index factor called IESS to select the optimal scale for the AVG-Hat operator’s structural element, aiming at identifying different bearing faults effectively. Yi et al. [27] presented a fault diagnosis research methodology based on multi-scale morphology to accurately distinguish between various types of bearing faults. Yu et al. [28] put forward an average combined differential morphological filtering operator named ACDIF and a new index evaluation factor TEK to determine the optimal scale for selecting structural elements, effectively suppressing noise, and extracting shock pulses from vibration signals according to experimental results.
In summary, most scholars have concentrated on developing mathematical morphological operators and selecting appropriate structural elements for scaling purposes. Currently, there is a dearth of literature regarding the implementation of mathematical morphological filters in deep learning networks as well as fault diagnosis of acoustic signals. Therefore, this paper aims to address the challenge of constructing an end-to-end learning network that can effectively extract features from pulse signals.
The above research serves as the foundation for proposing a novel mathematical morphological network aimed at extracting shock features from acoustic array signals. The key contributions of this study are outlined as follows:
(1) The mathematical morphology layer is constructed using the multi-scale enhanced Top Hat morphology operator (MEAVGH), which generates new morphological branching channels by processing input signals with various structural elements.
(2) By incorporating channel attention and spatial attention mechanisms, we assign weights to the generated morphological branch channels to further enhance the screening of crucial feature information.
(3) We integrate the constructed mathematical morphological layer into a deep learning network for fault feature extraction in acoustic radiation signals emitted by rolling bearings.
The validity of the proposed model is only verified under laboratory conditions; thus, the diagnostic capability of the algorithm must be further verified under actual working conditions with complex background noise. The remaining sections of this paper are organized as follows: the second section provides a theoretical introduction, the third section presents experimental verification, and the concluding section offers an analysis of the findings.
2. Materials and Methods
2.1. Single-Scale Mathematical Morphology
The theory of mathematical morphology is an effective method for signal processing, which aims to suppress noise and extract significant features by directly applying pre-defined SE on time domain signals. The mathematical morphological filter primarily consists of four morphological operators (dilation operator, erosion operator, closing operator, and opening operator), defined as follows:
where xi is the input signal, yi is the output signal, and sj represents the discrete function of the structural element, here equivalent to the length of the morphological kernel. Based on the properties of these four basic morphological operators, the new morphological operators are defined as follows:
where FCD is a cascade combination of closed operator and expansion operator, which can enhance the extraction of positive pulse. FOE is a cascade combination of the open operator and the corrosive operator, which can enhance the extraction of negative pulses. Combining the filtering performance of the above two operators, a new enhanced top-hat transformation operator, EAVGH, is defined as follows:
The EAVGH operator can effectively enhance the characteristics of positive and negative pulses in fault signals, demonstrating excellent noise processing capabilities.
2.2. Multi-Scale Mathematical Morphology
Multi-scale mathematical morphology can better filter acoustic signals. Suppose ε(ε = 1, 2, … λ) is the scale of the structural element s, then SE can be expressed as:
The multi-scale dilation operator and erosion operator are defined as follows:
The multiscale opening and closing operator of signal xi can then be further defined as:
Ultimately, the multi-scale EAVGH can be defined as:
In the process of multi-scale mathematical morphological filtering, the selection of structural element (SE) scales significantly influences the filtering results. Choosing smaller SE scales can preserve more fault feature information but may compromise noise reduction performance. Conversely, selecting larger SE scales can enhance noise reduction performance at the expense of reducing fault information [29,30,31,32]. This further demonstrates that scale selection of structural elements can yield different filtering performances. Therefore, this paper employs multi-scale mathematical morphology as a network and utilizes backpropagation to adaptively determine the SE scale for EAVGH.
2.3. Multi-Scale Weight Fusion
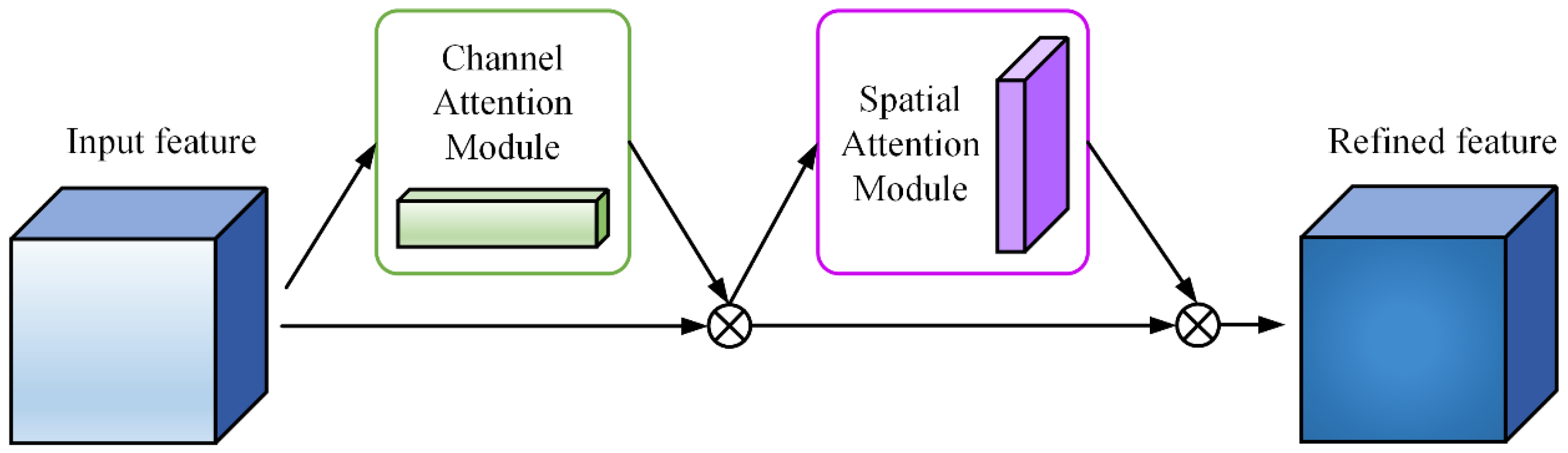
This paper employs an adaptive weight fusion method to perform feature-weighted fusion of acoustic radiation signals at different scales, taking into signal feature information. A lightweight channel attention mechanism called CBAM (convolutional block attention module) [33] is utilized for this purpose, with its specific structure illustrated in Figure 1.
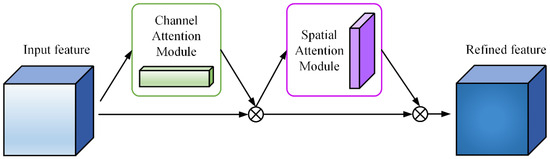
Figure 1.
CBAM channel attention mechanism.
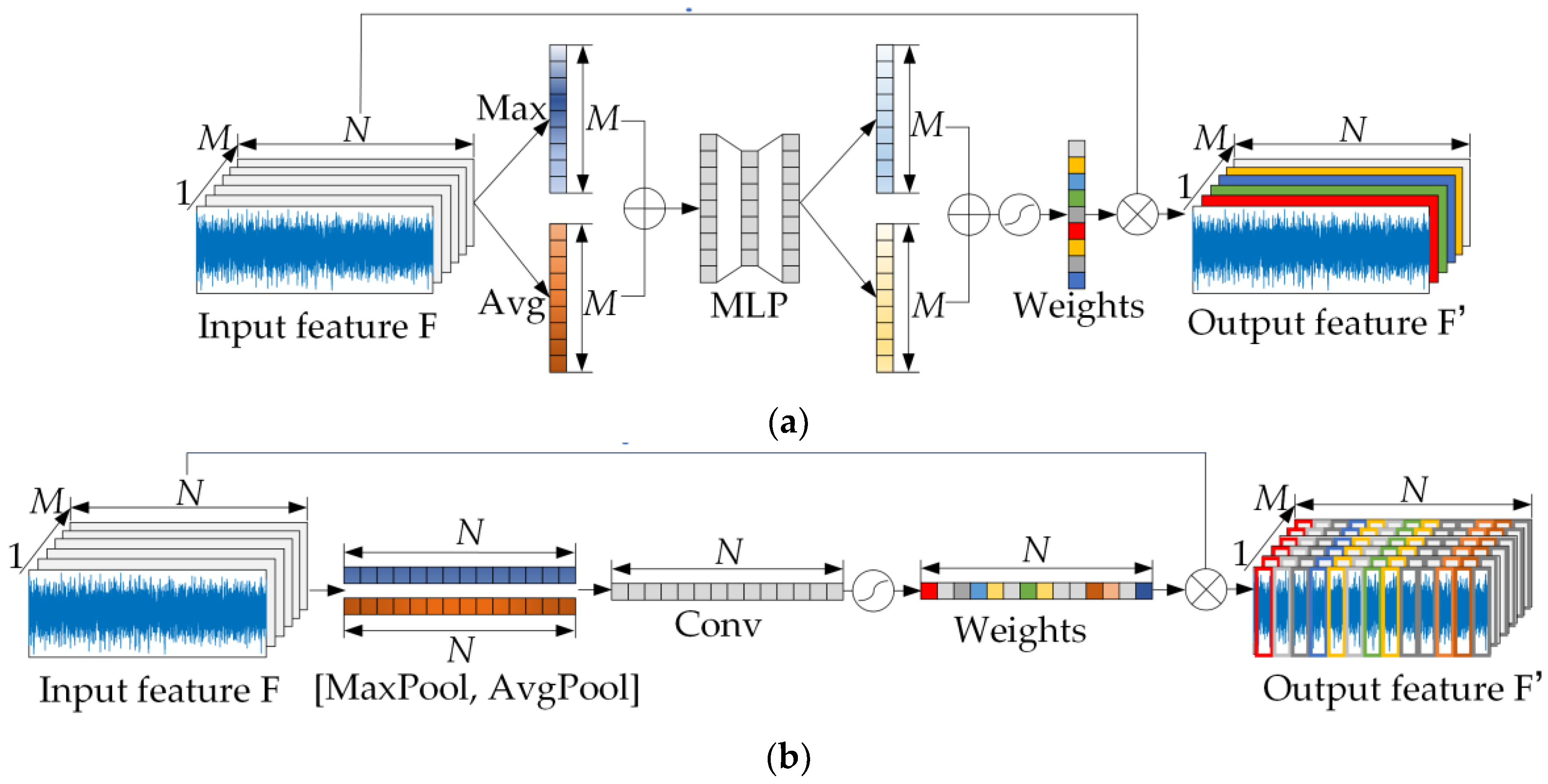
After processing the acoustic radiation signal using MEAVGH, we obtain multi-channel fault characteristic information. Considering that each channel contains distinct bearing fault characteristics, it is essential to assign a higher weight to channels with abundant bearing fault characteristic information and a lower weight to channels with weaker fault characteristic information. The processes of channel attention mechanism and spatial attention mechanism are illustrated in Figure 2a,b respectively.
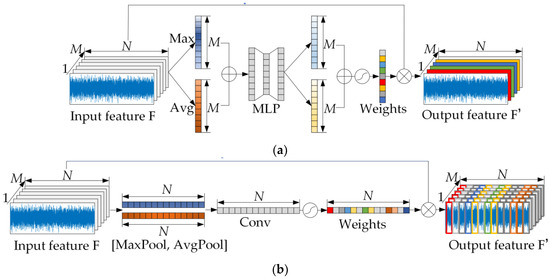
Figure 2.
Input signal is weighted: (a) channel attention mechanism, (b) spatial attention mechanism.
Global average pooling and global maximum pooling operations are respectively used to perform feature compression processing on the input signals; and are obtained as follows:
where EAVGHλ (1 ≤ λ ≤ M) represents the total number of input M structural element scales and N represents the length of input signal. The generated two feature maps are fed into a double-layer neural network (MLP) with shared weights to learn the dependency relationship between channels; the dimensionality between the two neural layers is reduced by compression ratio. Finally, the MLP output features are carried out via sum-based operations, and sigmoid activation operations are performed to generate the final channel weight ωm, the expression of which is defined as follows:
where W1 and W2 respectively represent the neural nodes of the two fully connected layers, σ(•) represents the sigmoid function, and the final output signal is:
After passing through the channel attention mechanism, the spatial attention mechanism takes as the input of this module. Global average pooling and global maximum pooling operations are then continuously used to obtain and :
The two generated feature graphs are concatenated based on the channel dimensions, followed by dimensionality reduction using convolutional check channels to obtain a single-channel feature graph. Finally, the dependency between spatial and channel dimensions is learned through a sigmoid function, generating the weight of the spatial dimension ωn, defined as follows:
where σ(•) represents the sigmoid function, f(•) represents the convolution operation, [;] represents the concat operation, and the final output signal is:
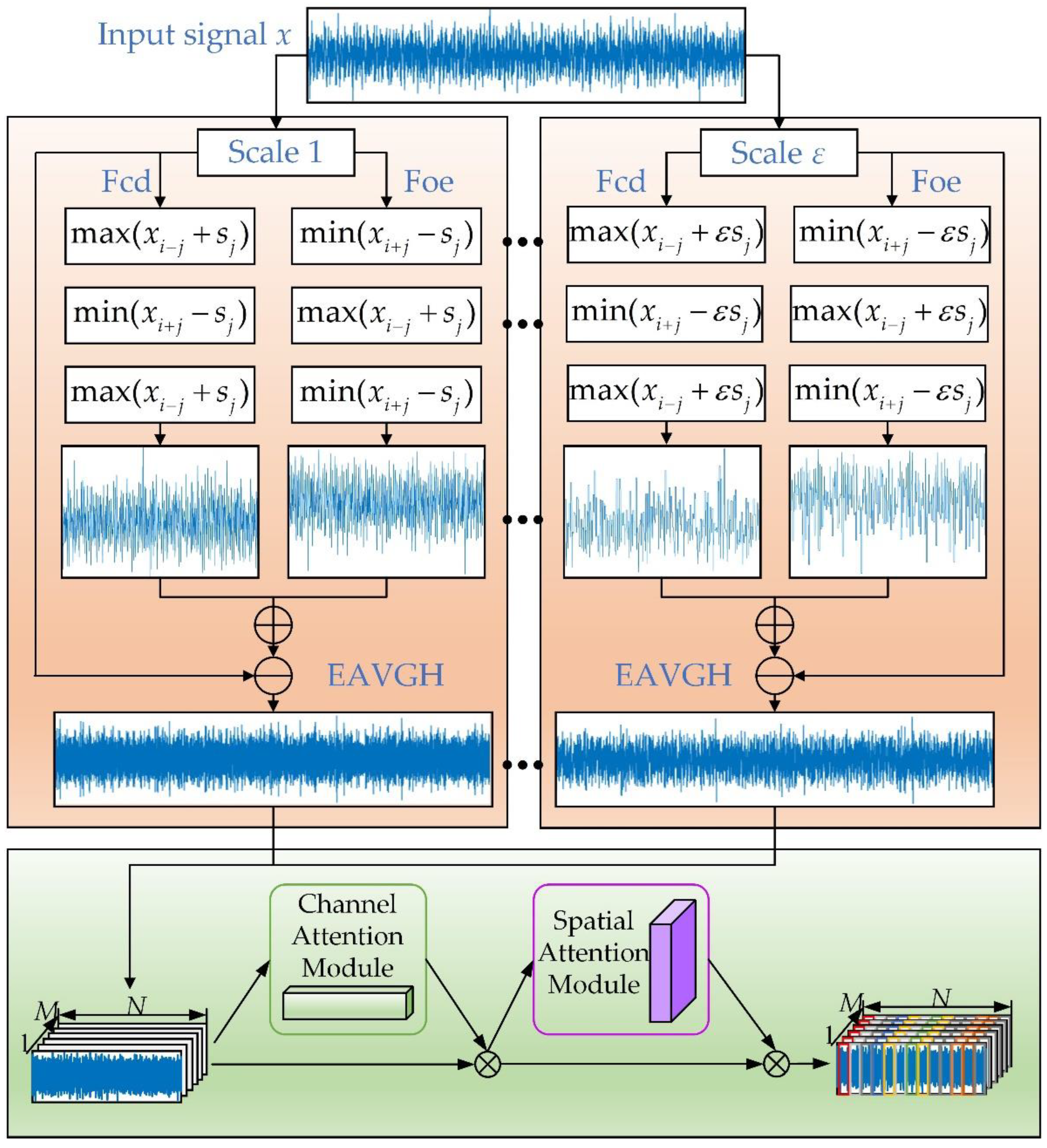
The weighted fusion mathematical morphological layer, as depicted in Figure 3, is utilized to process the acoustic array signal. This processing generates multiple branches of channels, which are then subjected to channel-weighted fusion for enhanced provision of comprehensive fault characteristic information.
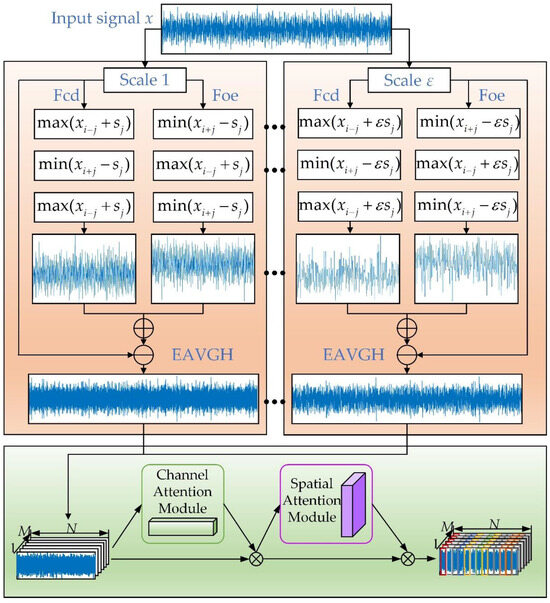
Figure 3.
Composition and weighting method of the mathematical morphological layer.
2.4. Multiscale Mathematical Morphology Network
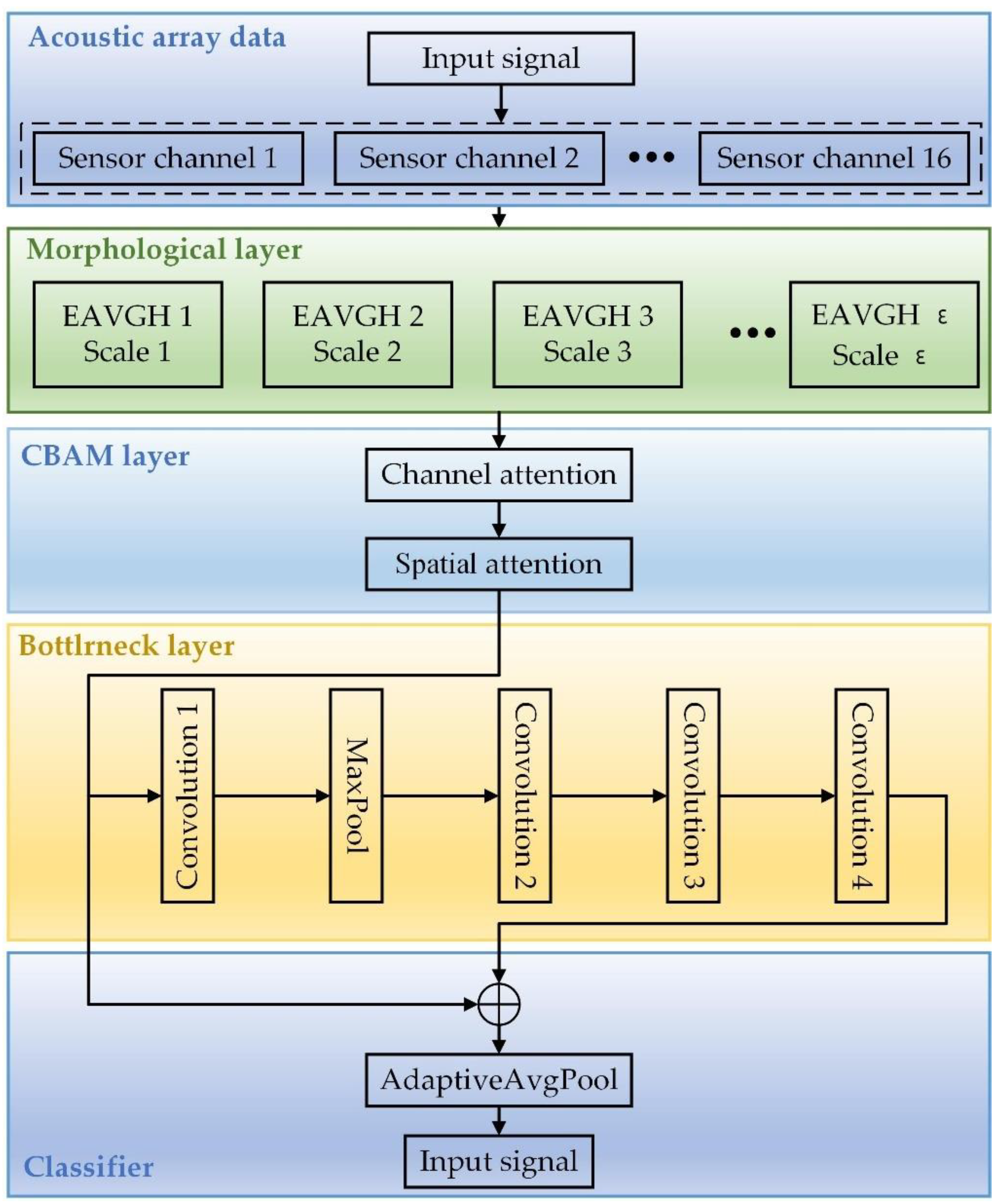
The multi-scale mathematical morphology network proposed in this paper is shown in Figure 4. The network is mainly composed of three parts; the first is the signal feature screening process of the acoustic array. The second part is a multi-scale mathematical morphological layer, which mainly de-noises the interference noise in the acoustic signal. The network structure of the third part is similar to the network structure of CNN, which consists of a series of convolutional pooling layers stacked. The output signal can be represented as follows:
where represents the filtering result of EAVGH at scale λ, and Y represents the spliced signal. There are a total of M acoustic array channels, each containing λ scales. CBAM() represents the quantified channel attention mechanism, and the specific expression is shown in Formulas (14)–(21).
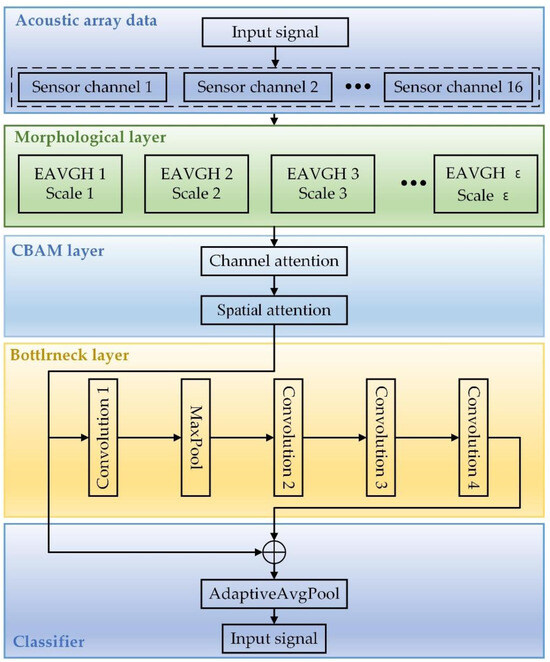
Figure 4.
General technology roadmap.
The expression of the convolution layer is defined as follows:
where represents the weight value of the ith convolution kernel of layer l, represents the bias coefficient of the ith convolution kernel of layer l, represents the local region of the j position of layer l, represents the input of the jth neuron of layer l + 1, and * represents the convolution operation.
The pooling layer mainly reduces the input feature dimension through down-sampling, which can effectively prevent over-fitting. In this paper, max-pooling is adopted as the output, and its definition is as follows:
where P represents the output of the pooling layer, and w and s represent the width and step length of the pooling window, respectively.
Finally, the expression of the feature classifier is as follows:
where f() represents the Softmax activation function.
3. Results
3.1. Experimental Introduction
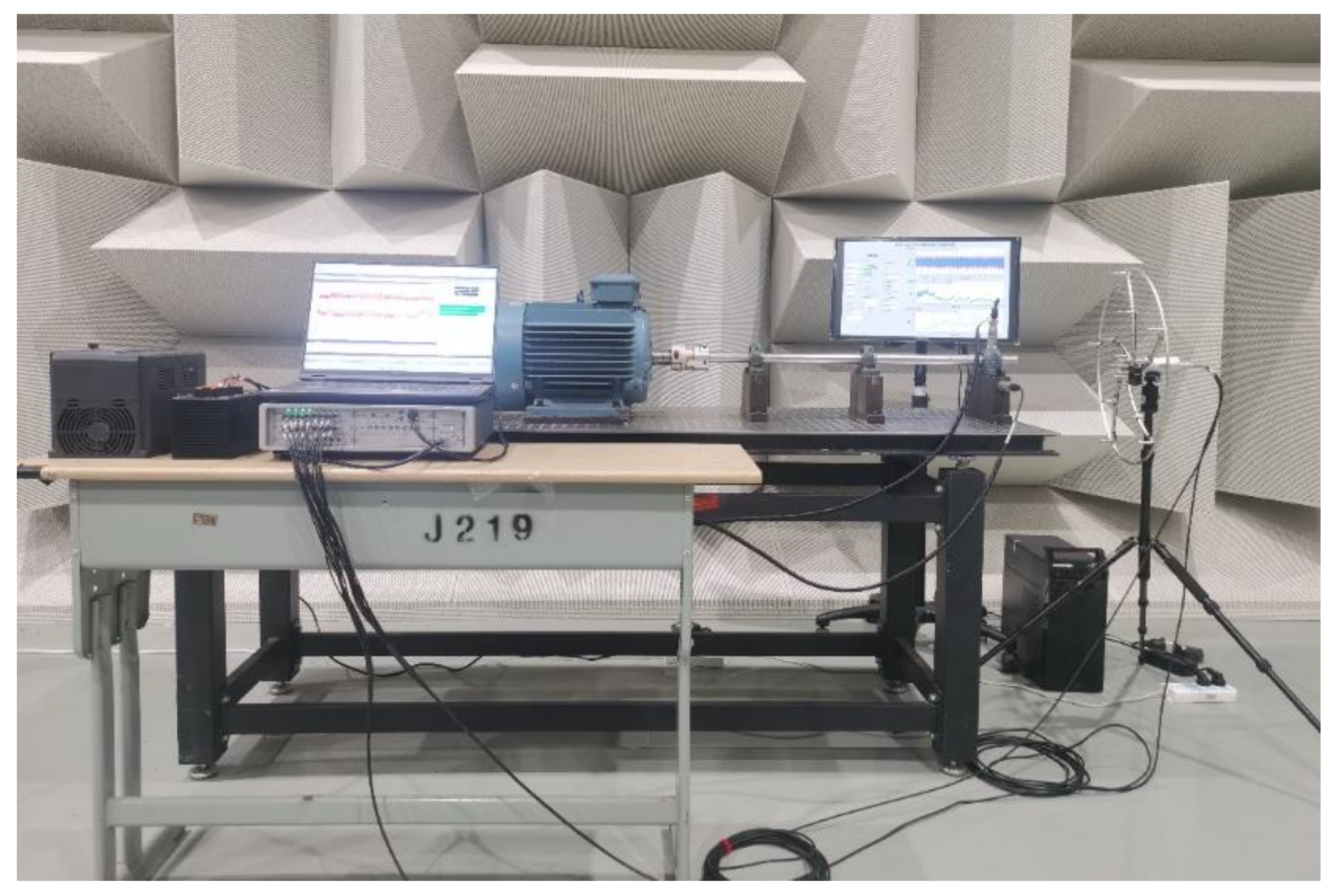
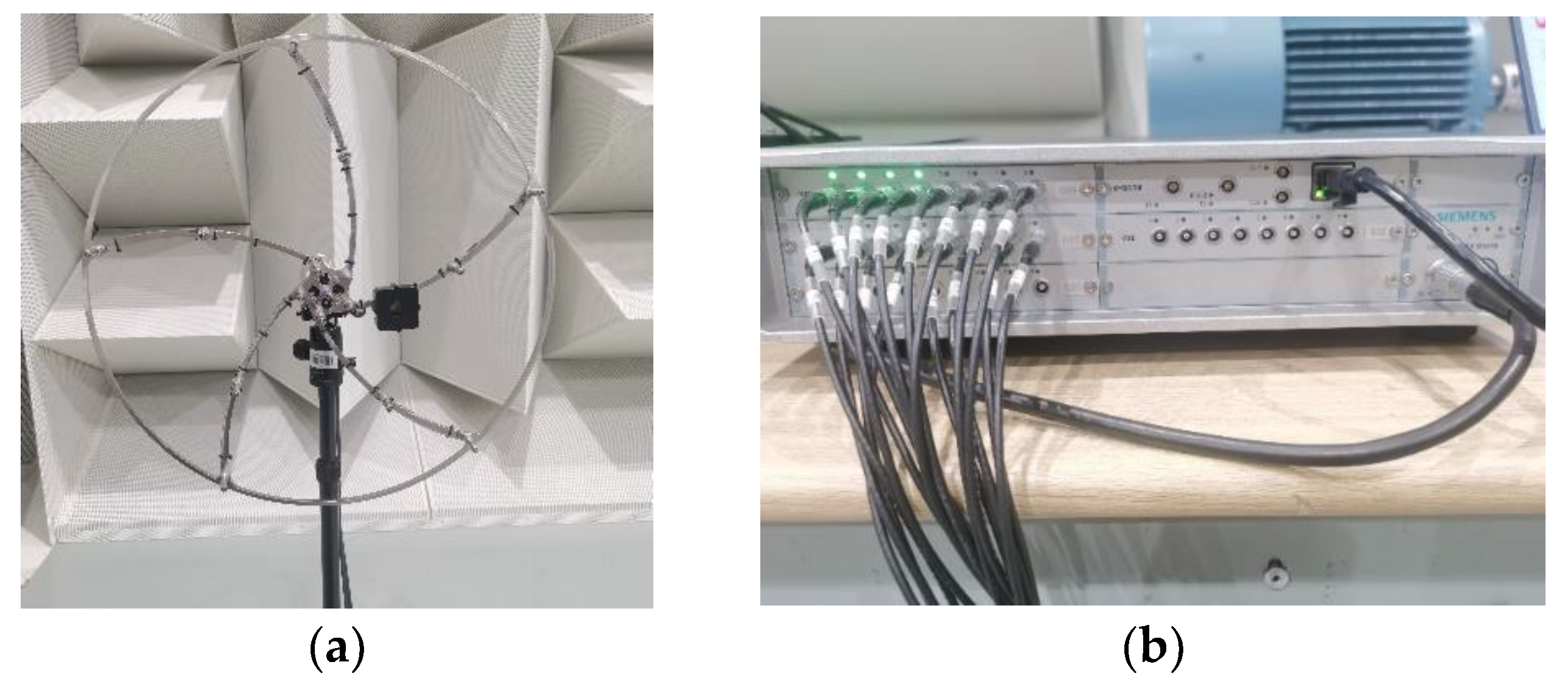
To verify the effectiveness of the proposed method, data collection was carried out on the fault test bench of a rolling bearing in the anechoic chamber. The test bench consisted of a fault bearing, bearing seat, shaft, motor, data collector, and acoustic array sensor. The test device is shown in Figure 5. The model of the data collector is PAK MKII-SC42. The measuring devices consist of 16 BSWA MPA416 acoustic array sensors; the sensitivity of each sensor varies from 48.5 mV/Pa to 50 mV/Pa; the frequency response range of the device is 20–20,000 Hz; the temperature range is −10 °C to 50 °C; the pressure coefficient is −0.06 dB/kPa. The sampling frequency is 20 kHz, the plane where the sensor is located is perpendicular to the shaft, and the distance from the tested bearing is 300 mm. The acoustic array sensor and data collector are shown in Figure 6a,b, respectively.
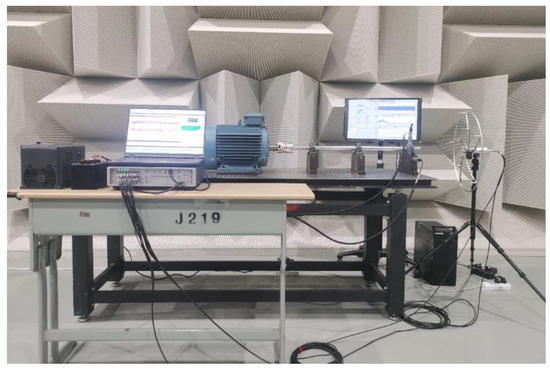
Figure 5.
Test bench.
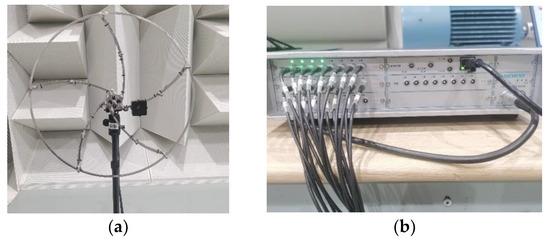
Figure 6.
(a) Acoustic array sensors, (b) data collectors.
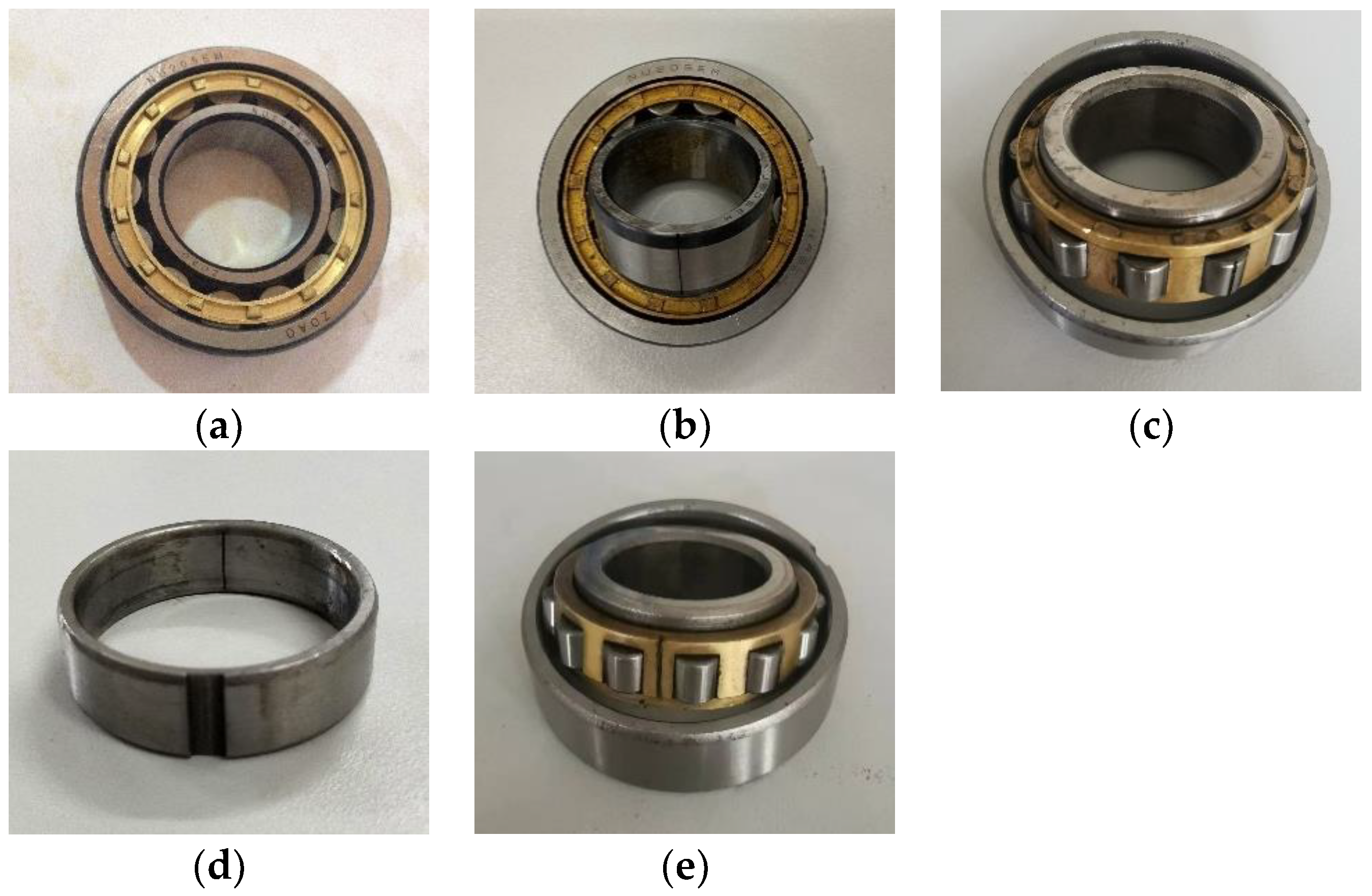
The specific geometric parameters of the test bearing are presented in Table 1. In order to accurately simulate the operational state of a faulty bearing and account for the independent fault data of each component, wire-cutting technology was employed to manually induce faults in the NU205 bearing. The damage locations were deliberately introduced in the outer ring, inner ring, rolling elements, and bearing cage with a consistent damage width of 0.1 mm. The experiment involved testing and analyzing a total of seven different bearing health states, including the inner ring fault, outer ring fault, rolling element fault, cage fault, and coupling fault. Each fault was installed separately on the test bench for analysis. Figure 7 provides a visual representation of the defective components in the bearings. For each health condition, 600 training samples were available for analysis; 400 data samples were used to train the network model, while the remaining 200 samples were utilized for model testing. To ensure fairness in experimentation, all comparison results underwent analysis using a 5-fold crossover method. The length of each sample data was set at 2048 units with a motor speed of 980 RPM. Additionally, digital labels ranging from 0 to 6 accurately represented different types of faults assigned to them. Further details regarding the sample dataset can be found in Table 2.

Table 1.
Structural parameters of rolling bearing.
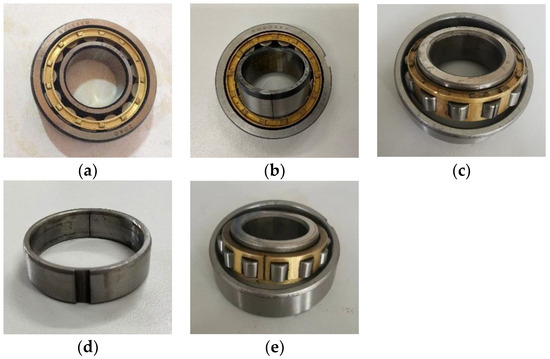
Figure 7.
Bearing failure under different working conditions: (a) Normal, (b) Inner ring fault, (c) rolling fault, (d) Outer ring fault, (e) Cage fault.
Table 2.
Set up the fault data set of bearings.
Table 3 shows the network framework of the algorithm proposed in this paper. In the mathematical morphological layer, the SE length was set to 8, and the maximum scale of structural elements was set to 4. The batch sizes for the training and test samples were set to 36, the optimizer to Adam, the learning rate to 0.001, and the iteration step size to 100. To prevent overfitting, batch normalization (BN) and dropout were adopted, with a value of 0.6. The hardware configuration value was calculated: 11th Gen Intel(R) Core(TM) i7-11700K@3.60GHz and NVIDIA GeForce GTX 3070 GPU. The Python language possesses the advantages of object orientation, high development efficiency, extensibility, and strong embeddability. Therefore, the MMNet was built under Torch-gpu 1.11.0 based on Python 3.10.
Table 3.
Structure and parameter settings of the method are presented.
3.2. Analysis Results
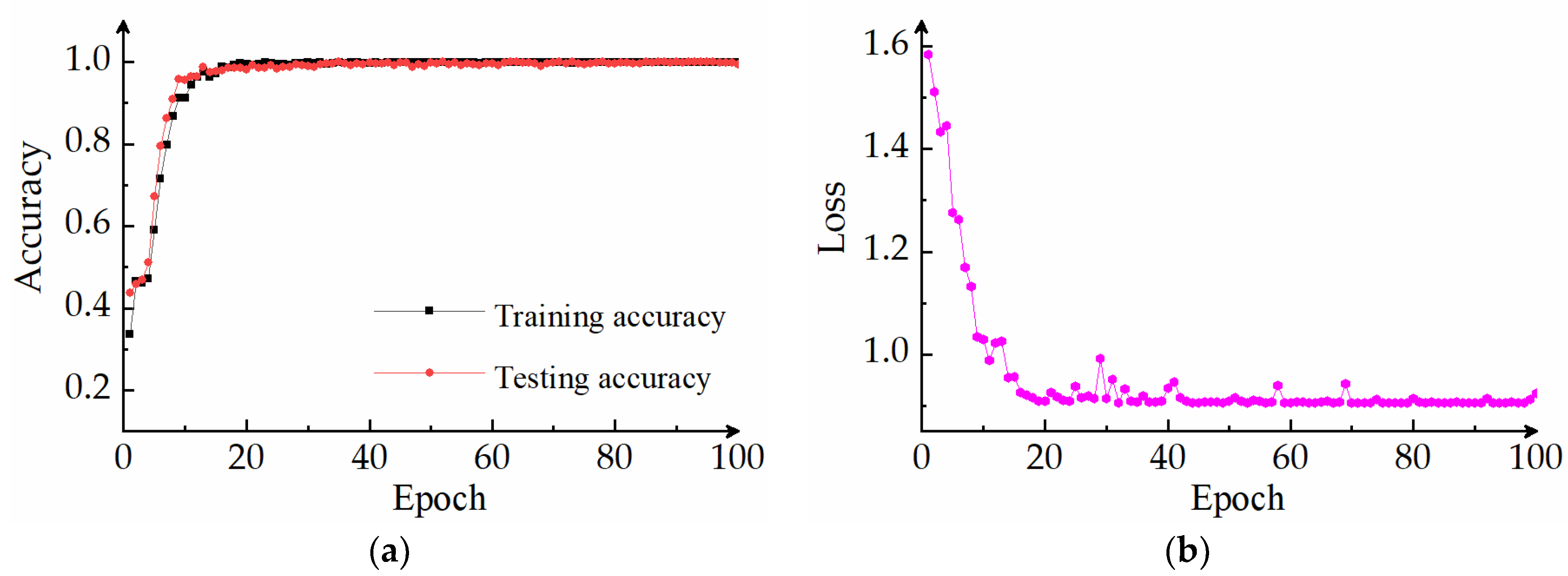
In order to validate the effectiveness of the proposed algorithm, Figure 8a illustrates the training and test processes of MMNet. It is evident from Figure 8a that the proposed method exhibits rapid convergence as the step size increases, reaching a stable curve at approximately 99%. In Figure 8b, the loss function also converges swiftly with increasing step size, stabilizing at ~0.4. These results demonstrate that the proposed algorithm achieves high accuracy in fault diagnosis.
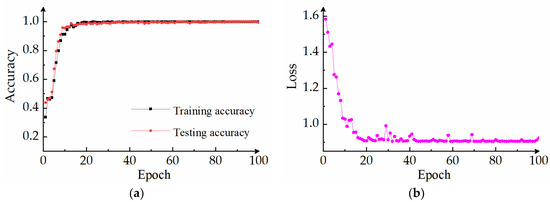
Figure 8.
Training process: (a) Accuracy curve, (b) Loss curve.
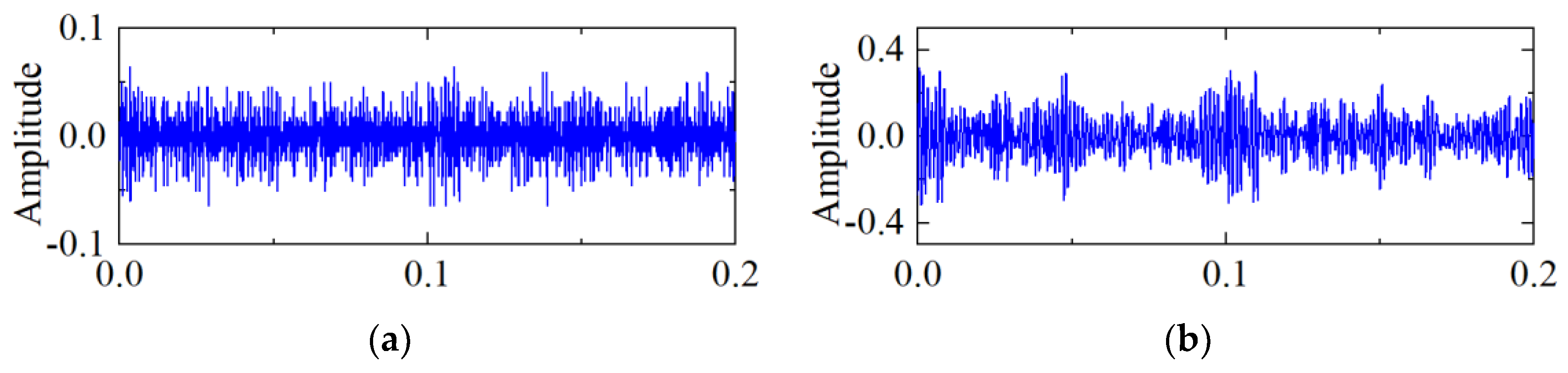
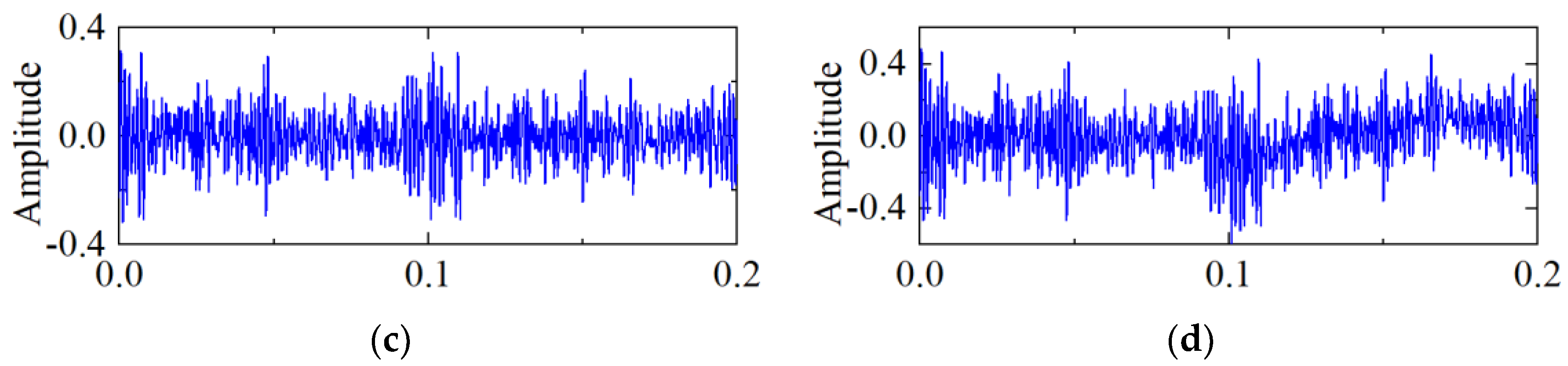
The output results of the C2 fault input into the morphological network layer at different scales are illustrated in Figure 9, where the ordinate represents the signal amplitude, and the abscissa represents the sampling number. It can be observed from Figure 9 that the morphological filter not only effectively suppresses Gaussian white noise but also extracts impact features. The filtered signal exhibits enhanced smoothness while preserving positive and negative impact characteristics, enriching the fault feature information.
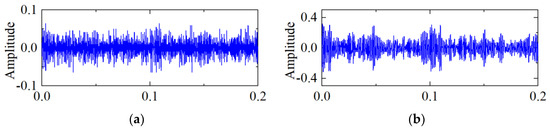
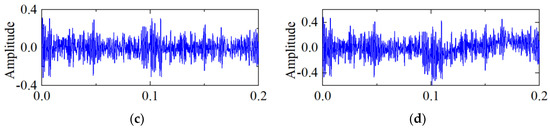
Figure 9.
Output results of different morphological scales under the C2 fault of measuring point 1: (a) Normal, (b) Scale 1, (c) Scale 2, (d) Scale 3.
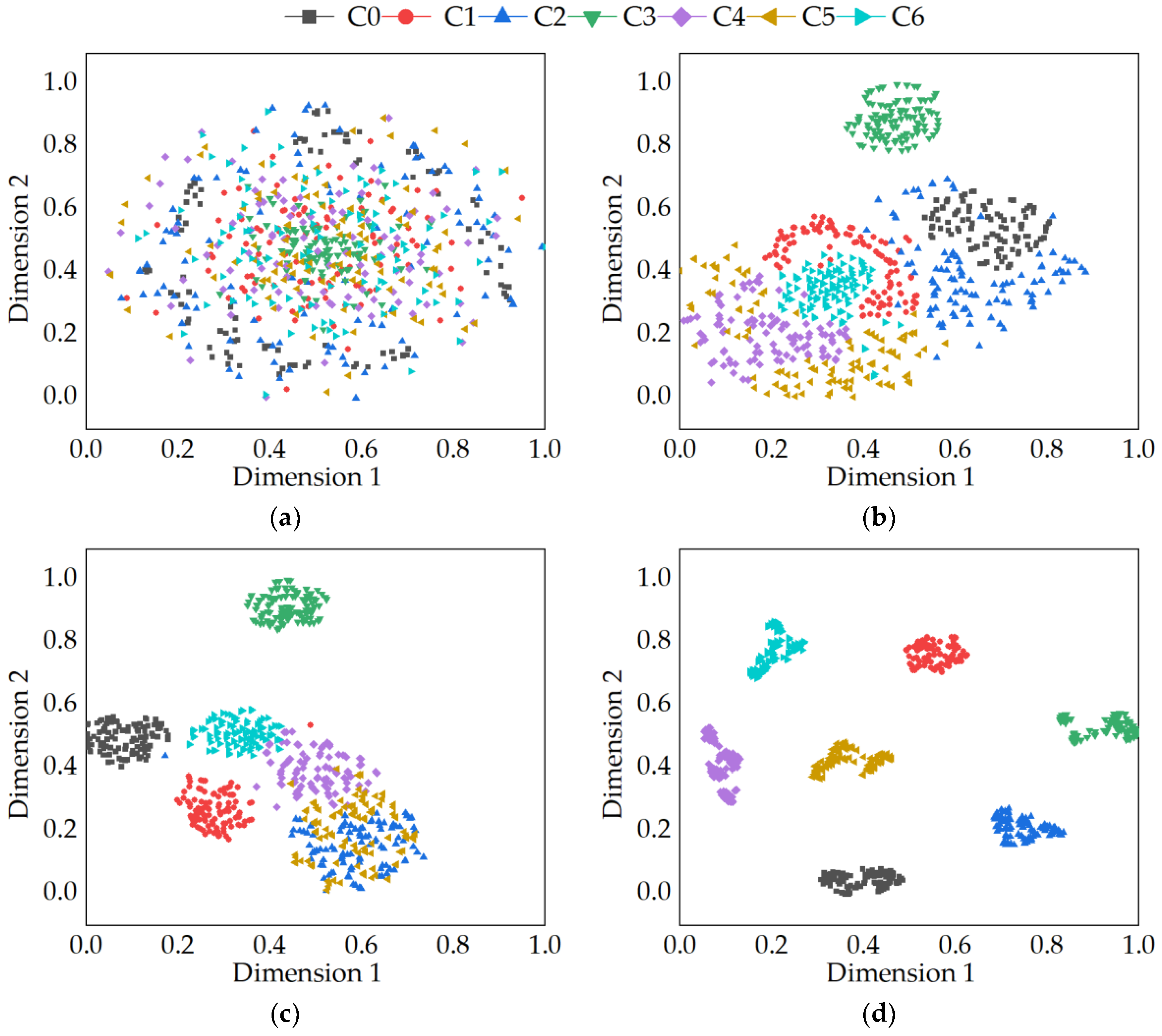
To comprehend the feature visualization outcomes at different stages of MMNet and achieve low-dimensional visualization of each layer’s features, a t-distributed stochastic neighbor embedding algorithm (t-SNE) for feature dimensionality reduction visualization was employed. The visualized outcomes are presented in Figure 10, where x and y denote dimension 1 and dimension 2, respectively. Figure 10a displays the original input data with disorganized data distribution. After undergoing the mathematical morphology layer and channel attention mechanism, the data are shown in Figure 10b with some fault characteristics emerging, indicating that the network learned rolling bearing fault characteristics. As depicted in Figure 10d, when passing through the final network, data features can be precisely clustered with clear boundaries and large spacing between classes. This further validates the superiority of our proposed method.
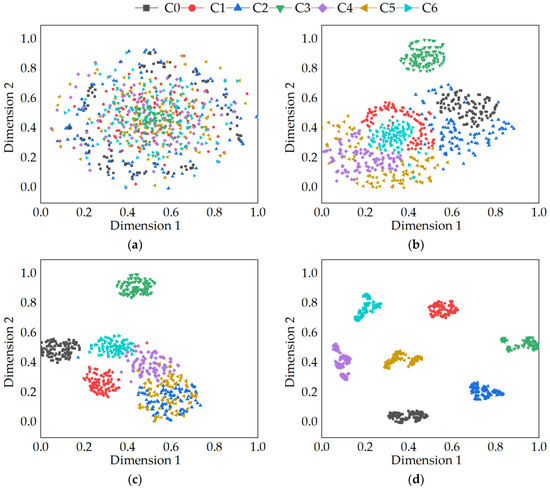
Figure 10.
t-SNE visualization results of the method. (a) Original input, (b) input mathematical morphology layer and channel attention mechanism, (c) middle network, (d) final network.
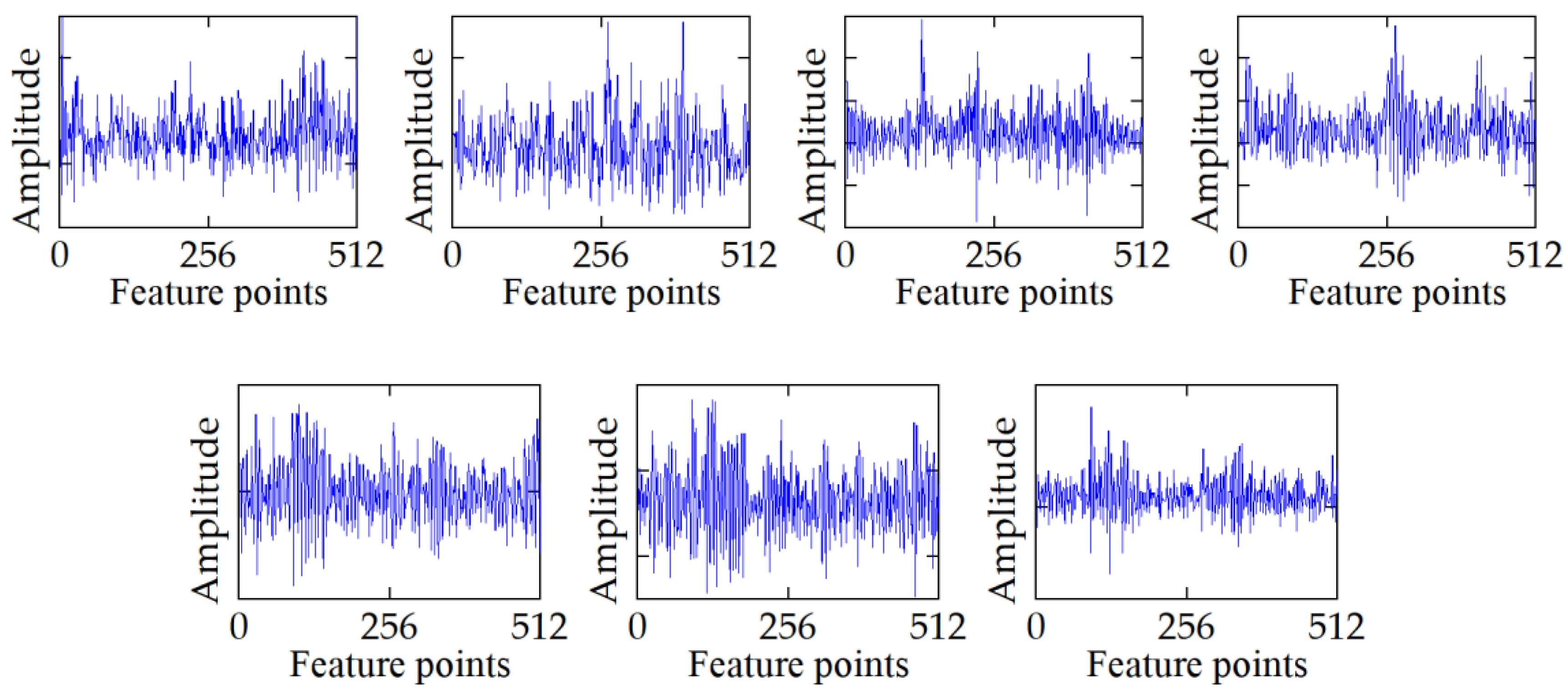
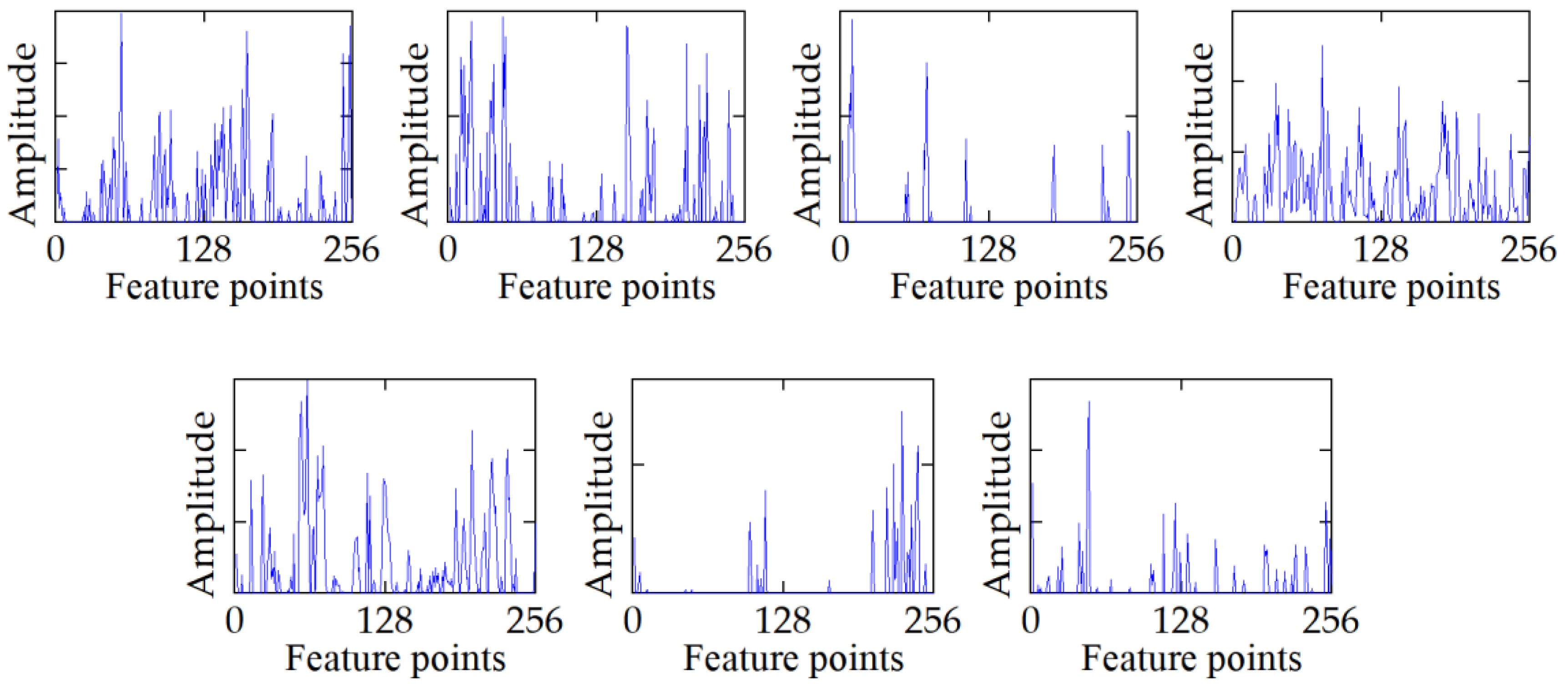
The test signal was further studied through the convolution pooling layer for feature learning. The feature results learned at the beginning are shown in Figure 11; the horizontal coordinate represents the number of feature points, and the vertical coordinate represents the amplitude. It can be clearly seen from the figure that the impact features of different types of bearing faults were extracted, indicating that the algorithm proposed in this paper is effective in extracting pulse impact features. With the deepening of the network layers, the deep-level processing results of features are shown in Figure 12; the characteristics of the impulse pulse can be clearly seen, and part of the amplitude became 0, indicating that the proposed algorithm can effectively retain the impulse fault and suppress the influence of other irrelevant noises.
Figure 11.
Output results of different fault middle layers.
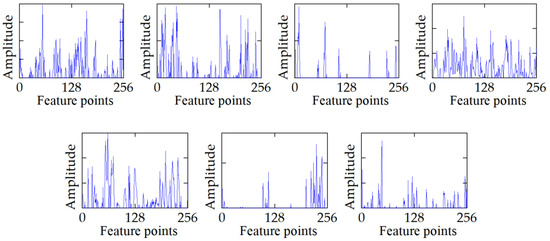
Figure 12.
Output results at the last fault layer.
3.3. Comparison of Results with Other Methods
The fault diagnosis performance of the algorithm proposed in this paper was further validated through a comparative and analytical study with ResNet [34], DenseNet [35], and Le-Net-5 [36]. The detailed configuration parameters of the other three methods are presented in Table 4. Each algorithm utilizes an identical classifier, ensuring fairness in comparison by adopting the same configuration parameters. Specifically, the ResNet network incorporates one residual module (Res), while the DenseNet network consists of two dense connection block modules (Den). Both networks employ a convolution kernel size of 3 with a step size of 1 and utilize a maximum step size of 2 for their pooling operations. All methods input 16 channels from an acoustic array comprising 36 training batches, with an iteration length set to 100.
Table 4.
Structure and parameter setting of comparative methods.
The results from five cross-validations are presented in Table 5, showcasing that the proposed algorithm achieves a fault classification accuracy of 98.56% and a minimal computation time of 22.97 s. Notably, the average accuracy of DenseNet surpasses that of DenseNet by 3.02%. This discrepancy can be attributed to the complex network structure of DenseNet, which demands significant computational resources with an execution time of 92.07 s and substantial memory usage. Meanwhile, due to the absence of morphological filter layers and channel attention mechanisms for extracting rich features, the classification accuracy of ResNet is limited to 93.64%. Similarly, the traditional LeNet-5 network exhibits a relatively lower classification accuracy of 84.60%. In conclusion, this paper’s proposed method demonstrates exceptional diagnostic precision.
Table 5.
Results of four models based on five-fold cross-validation.
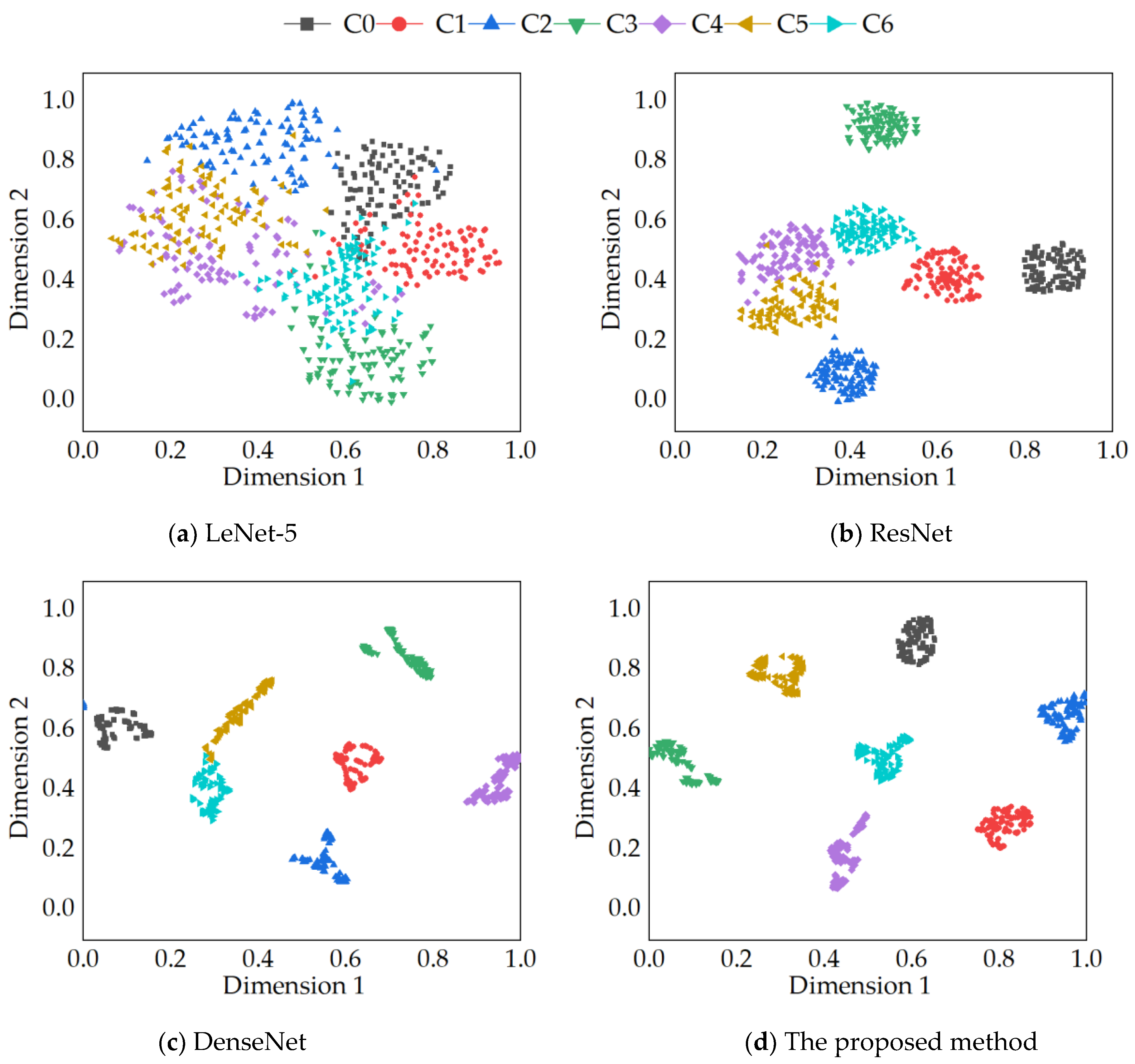
In order to further evaluate the feature extraction capability of the four methods, we utilized the t-SNE algorithm to visualize the extracted features on a two-dimensional plane, as illustrated in Figure 13. It is evident from Figure 13d that our proposed method demonstrates superior clustering effectiveness with distinct separation among different fault types. Although Figure 13c showcases satisfactory classification results achieved by the DenseNet, there are instances of overlapping features. Conversely, the LeNet-5 exhibits poor performance in terms of classification as it fails to effectively distinguish and separate fault features. Furthermore, ResNet displays inadequate feature clustering performance. Consequently, it can be inferred that our proposed algorithm possesses commendable noise reduction and feature extraction capabilities.
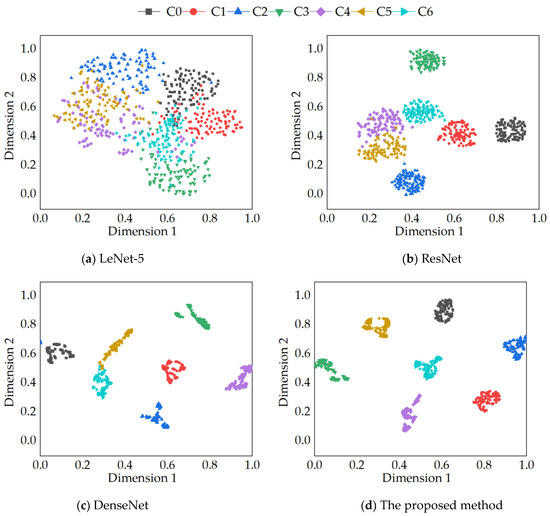
Figure 13.
Visualization of features from (a) LeNet-5, (b) ResNet, (c) DenseNet, (d) The proposed method.
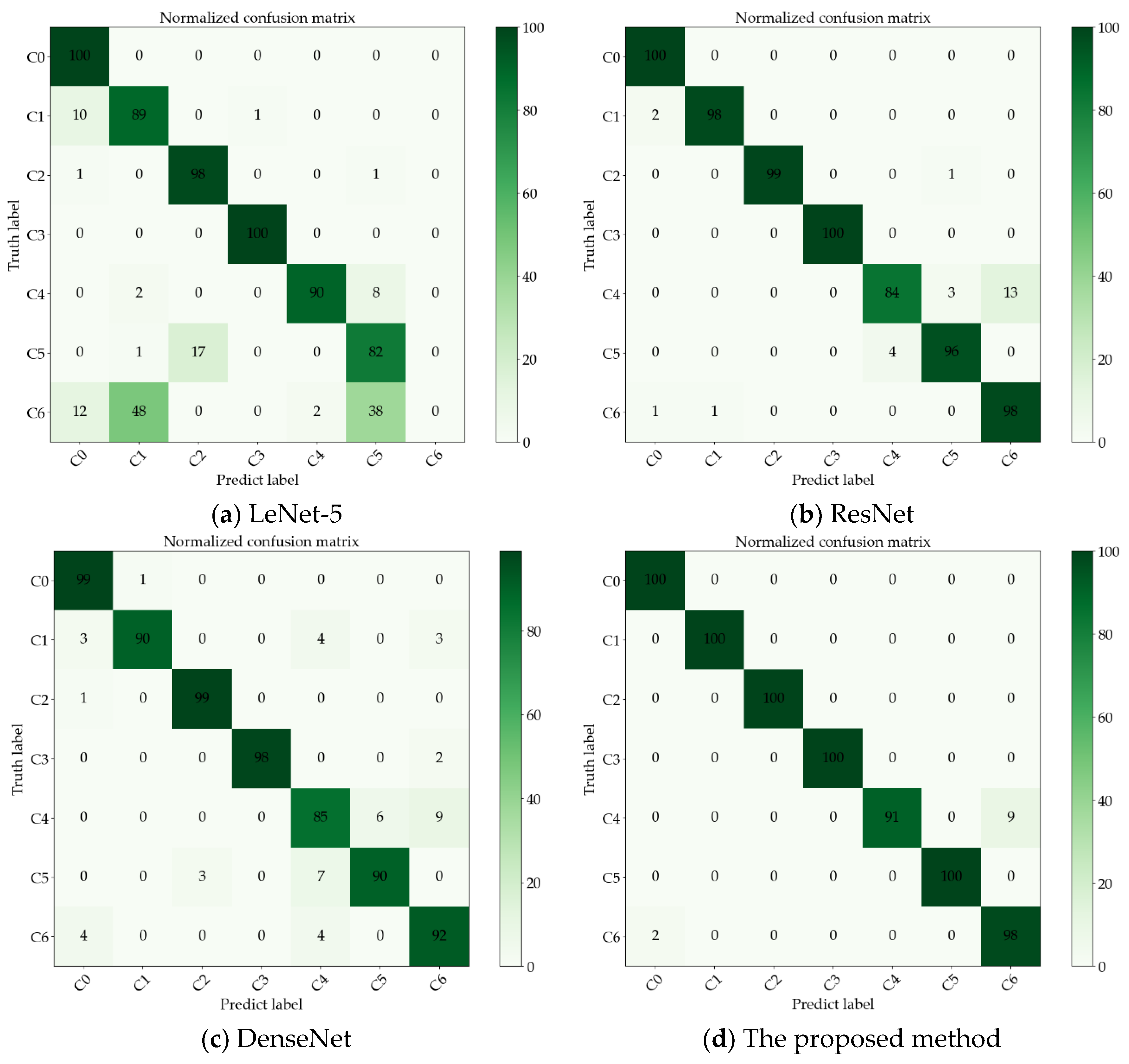
In order to provide a quantitative explanation of the classification accuracy and error ratio for rolling bearings using four different methods, Figure 14 displays the output results in the form of confusion matrices. These matrices depict the accuracy and recall rates for each type of bearing failure. From Figure 14d, it is evident that the method proposed in this paper effectively identifies various types of faults with remarkably high classification accuracy, nearly reaching 100%. However, it should be noted that the recognition rate for C4 faults is slightly lower at 91%. This discrepancy suggests potential misestimation related to cage failure and its coupling fault. The other three methods exhibit inferior accuracy compared to our proposed approach.
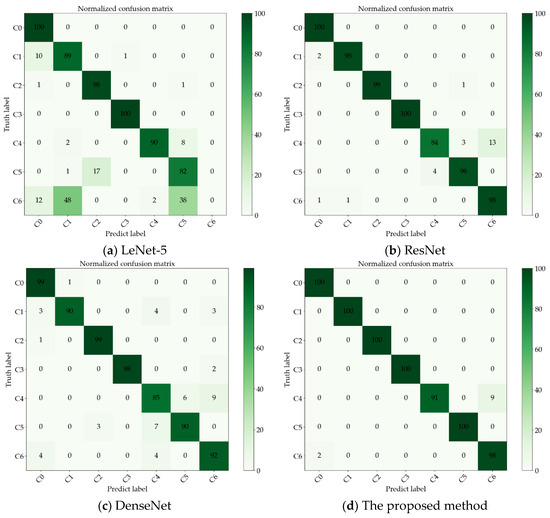
Figure 14.
Comparison of the confusion matrix of different algorithms: (a) LeNet-5, (b) ResNet, (c) DenseNet, (d) The proposed method.
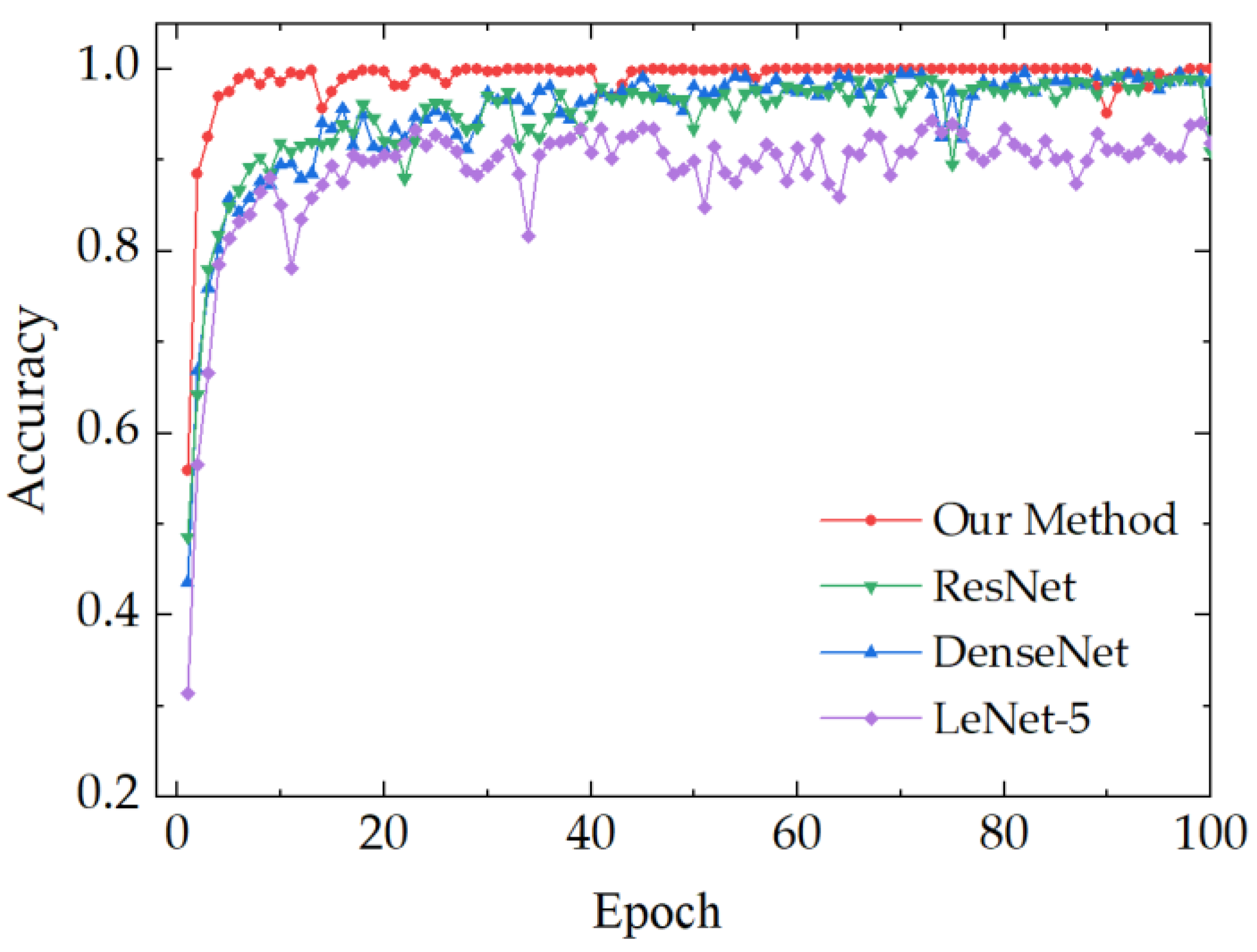
The training process for each method is depicted in Figure 15. It can be observed that the proposed method demonstrates the most rapid convergence rate and ultimately stabilizes at approximately 99%. However, despite the relatively fast convergence speed of ResNet and DenseNet methods, their training processes are characterized by instability primarily due to significant interference from background noise. Meanwhile, the LeNet-5 network model exhibits lower training accuracy and unstable convergence accuracy. These results further validate the robustness of our proposed method.
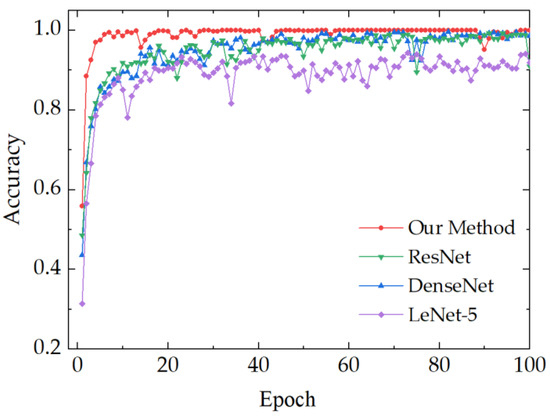
Figure 15.
Accuracy of four methods during the training process.
3.4. Experimental Analysis of Stability
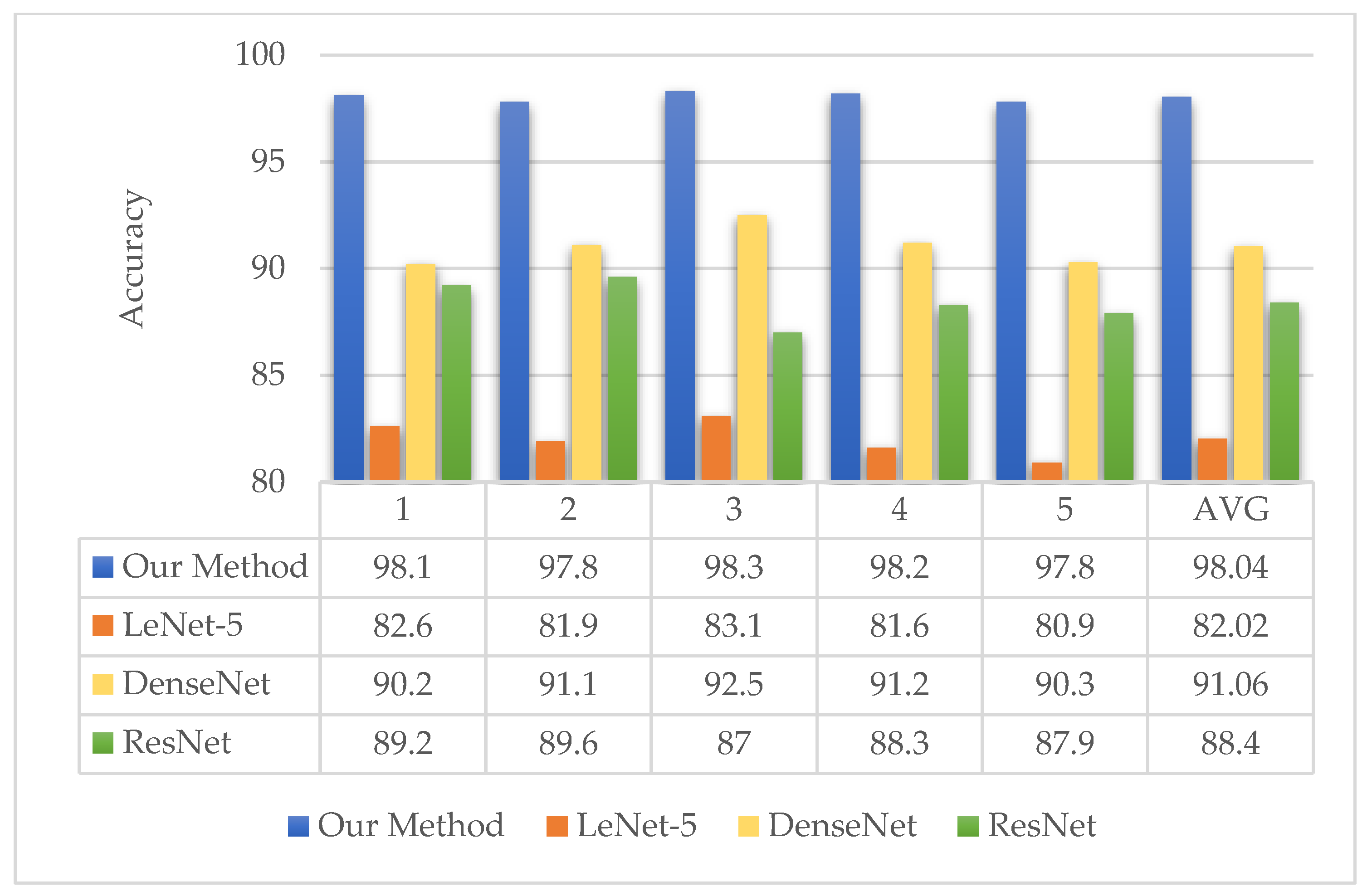
The proposed algorithm demonstrates robustness in the presence of noise due to its effective noise suppression and fault feature extraction capabilities. To evaluate this, white Gaussian noise with a signal-to-noise ratio of −5 dB was introduced to the acoustic array signal, generating new data samples. The processing procedure remained consistent with the previous experimental method, and the analysis results are depicted in Figure 16. In comparison to alternative methods, our proposed approach exhibits high accuracy in fault classification, achieving an average success rate of 98.04% across five cross-experiments. This further substantiates the advantages of the proposed method in effectively handling background noise.
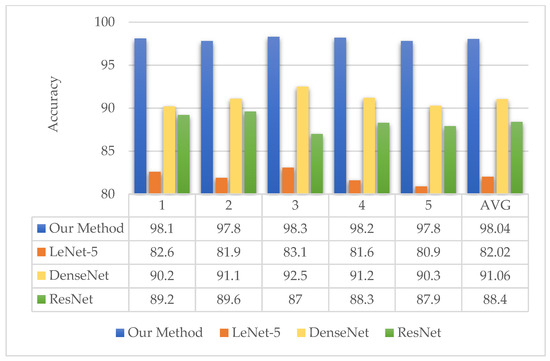
Figure 16.
The results of different methods are compared when −5 dB noise is added.
To assess the sensitivity of the proposed algorithm in scenarios with limited samples, we investigated the training sample size and feature processing capability of the algorithm. The training sample dataset was divided into three portions: 10%, 30%, and 50%. Table 6 presents the experimental comparison results for four methods. From Table 6, it can be observed that when the dataset size is set at 50%, there are no significant differences in test results among the methods. However, when reducing the training scale to 30% of the dataset, the proposed method remains highly stable with an accuracy of 98.32%, while DenseNet and LeNet-5 experience a notable decrease in accuracy. When further reducing it to only 10%, the DenseNet algorithm achieves an average test accuracy of merely 75.06%, whereas our proposed algorithm maintains a high accuracy rate of 95.30%. These experimental comparison results demonstrate that even under limited samples, the proposed method is capable of extracting effective features.
Table 6.
Analysis results under different data sets.
4. Discussion and Conclusions
The acoustic sensor offers the advantages of non-contact measurement and easy installation. However, the acoustic array captures abundant fault characteristic information of rolling bearings and a significant amount of background noise. To address these issues, we propose embedding the multi-scale mathematical morphological operator into the convolutional neural network to create a novel mathematical morphological neural network named MMNet. Consequently, we have obtained the following conclusions:
(1) The proposed method effectively mitigates noise interference in acoustic signals and successfully extracts fault characteristic information from rolling bearings. The algorithm demonstrates rapid convergence speed, achieving a fault classification accuracy of 98.56%. Experimental results indicate that the proposed method maintains high sensitivity and stability even under strong background noise and limited training samples.
(2) Compared to ResNet, DenseNet, and LeNet-5, it is evident that the proposed method demonstrates superior t-SNE clustering efficacy with distinct separation among different fault types. Additionally, this method achieves higher accuracy rates than the other three methods. Regarding model training efficiency, the proposed method only takes 22.97 s for a 100-step iteration time, outperforming the other three methods. These comparative results further validate the exceptional accuracy of the proposed method in fault diagnosis.
The noise addition experiment demonstrates the effective noise removal capability of the proposed method, as the EAVGH operator can simultaneously extract positive and negative pulses in acoustic radiation signals. Furthermore, different structural element scales of EAVGH exhibit varying feature extraction performance, further validating the exceptional filtering ability of MMNet. Consequently, it is anticipated that the proposed method will also yield favorable results under real working conditions. Future work will further investigate the migration algorithm and lifetime prediction method based on mathematical morphological networks. Additionally, it will explore research on rolling bearing fault diagnosis in the presence of multi-source data. Moreover, we can consider addressing the fault diagnosis problem of multi-source field coupling and researching transfer learning based on mathematical morphological networks.
Author Contributions
Conceptualization, Y.L. and S.K.; methodology, Y.L.; software, Y.L.; validation, Y.L. and Y.Y.; formal analysis, Y.L. and S.K.; investigation, Y.L.; resources, X.T. and X.K.; data curation, Y.L. and X.K.; writing—original draft preparation, Y.L.; writing—review and editing, Y.L.; visualization, Y.Y.; supervision, F.S.; project administration, F.S. and X.T.; funding acquisition, F.S. and X.T. All authors have read and agreed to the published version of the manuscript.
Funding
This work is supported by the National Natural Science Foundation of China (No. 51675350). “Jie Bang Gua Shuai” Key Technologies R&D Program of Liaoning Province, project No. 2021JH1/10400031 and Liaoning Province Research Center for Wastewater Treatment and Reuse.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The detailed data supporting the results of this study are available from the corresponding authors upon request. The data are not publicly available due to personal privacy.
Acknowledgments
Thanks to Xiaotian Bai of Shenyang Jianzhu University for providing the experimental bench.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Leaman, F.; Vicuna, C.M.; Clausen, E. A Review of Gear Fault Diagnosis of Planetary Gearboxes Using Acoustic Emissions. Acoust. Aust. 2021, 49, 265–272. [Google Scholar] [CrossRef]
- Liu, F.; Wu, R.; Teng, F.; Liu, Y.; Lu, S.; Ju, B.; Cao, Z. A Two-Stage Learning Model for Track-Side Acoustic Bearing Fault Diagnosis. IEEE Trans. Instrum. Meas. 2021, 70, 1–12. [Google Scholar] [CrossRef]
- Pacheco-Chérrez, J.; Fortoul-Díaz, J.A.; Cortés-Santacruz, F.; Aloso-Valerdi, L.M.; Ibarra-Zarate, D.I. Bearing fault detection with vibration and acoustic signals: Comparison among different machine leaning classification methods. Eng. Fail. Anal. 2022, 139, 106515. [Google Scholar] [CrossRef]
- Yuan, X.; Liu, H.; Zhang, H. Enhanced Rolling Bearing Fault Diagnosis Combining Novel Fluctuation Entropy Guided-VMD with Neighborhood Statistical Model. Appl. Sci. 2023, 13, 192. [Google Scholar] [CrossRef]
- He, C.; Shi, H.; Si, J.; Li, J. Physics-informed interpretable wavelet weight initialization and balanced dynamic adaptive threshold for intelligent fault diagnosis of rolling bearings. J. Manuf. Syst. 2023, 70, 579–592. [Google Scholar] [CrossRef]
- Xue, J.; Xu, H.; Liu, X.; Zhang, D.; Xu, Y. Application of enhanced empirical wavelet transform and correlation kurtosis in bearing fault diagnosis. Meas. Sci. Technol. 2022, 34, 035023. [Google Scholar] [CrossRef]
- Ding, S.; Rui, Z.; Lei, C.; Zhuo, J.; Shi, J.; Lv, X. A rolling bearing fault diagnosis method based on Markov transition field and multi-scale Runge-Kutta residual network. Meas. Sci. Technol. 2023, 34, 125150. [Google Scholar] [CrossRef]
- Xue, L.; Lei, C.; Jiao, M.; Shi, J.; Li, J. Rolling Bearing Fault Diagnosis Method Based on Self-Calibrated Coordinate Attention Mechanism and Multi-Scale Convolutional Neural Network Under Small Samples. IEEE Sens. J. 2023, 23, 10206–10214. [Google Scholar] [CrossRef]
- Li, Y.; Zhou, J.; Li, H.; Meng, G.; Bian, J. A Fast and Adaptive Empirical Mode Decomposition Method and Its Application in Rolling Bearing Fault Diagnosis. IEEE Sens. J. 2023, 23, 567–576. [Google Scholar] [CrossRef]
- Xu, Y.; Li, Z.; Wang, S.; Li, W.; Sarkodie-Gyan, T.; Feng, S. A Hybrid Deep-Learning Model for Fault Diagnosis of Rolling Bearings. Measurement 2021, 169, 108502. [Google Scholar] [CrossRef]
- Wen, L.; Li, X.; Gao, L.; Zhang, Y. A New Convolutional Neural Network-Based Data-Driven Fault Diagnosis Method. IEEE Trans. Ind. Electron. 2017, 65, 5990–5998. [Google Scholar] [CrossRef]
- Ye, Z.; Yu, J. AKRNet: A novel convolutional neural network with attentive kernel residual learning for feature learning of gearbox vibration signals. Neurocomputing 2021, 447, 23–37. [Google Scholar] [CrossRef]
- Xu, Z.; Li, C.; Yang, Y. Fault diagnosis of rolling bearings using an Improved Multi-Scale Convolutional Neural Network with Feature Attention mechanism. ISA Trans. 2020, 110, 379–393. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Han, P.; Xu, L.; Zhang, F.; Wang, Y.; Gao, L. Research on Bearing Fault Diagnosis of Wind Turbine Gearbox Based on 1DCNN-PSO-SVM. IEEE Access 2020, 8, 192248–192258. [Google Scholar] [CrossRef]
- Jiang, Q.; Bao, B.; Hou, X.; Huang, A.; Jiang, J.; Mao, Z. Feature Mining and Sensitivity Analysis with Adaptive Sparse Attention for Bearing Fault Diagnosis. Appl. Sci. 2023, 13, 718. [Google Scholar] [CrossRef]
- Wang, X.; Li, A.; Han, G. A Deep-Learning-Based Fault Diagnosis Method of Industrial Bearings Using Multi-Source Information. Appl. Sci. 2023, 13, 933. [Google Scholar] [CrossRef]
- Fu, S.; Wu, Y.; Wang, R.; Mao, M. A Bearing Fault Diagnosis Method Based on Wavelet Denoising and Machine Learning. Appl. Sci. 2023, 13, 5936. [Google Scholar] [CrossRef]
- Chen, R.; Tang, L.; Hu, X.; Wu, H. Fault Diagnosis Method of Low-Speed Rolling Bearing Based on Acoustic Emission Signal and Subspace Embedded Feature Distribution Alignment. IEEE Trans. Ind. Inform. 2021, 17, 5402–5410. [Google Scholar] [CrossRef]
- Brusa, E.; Delprete, C.; Di Maggio, L.G. Deep Transfer Learning for Machine Diagnosis: From Sound and Music Recognition to Bearing Fault Detection. Applied Sci. 2021, 11, 11663. [Google Scholar] [CrossRef]
- Chen, T.G.; Yu, D.J. A Novel Method for Enhanced Demodulation of Bearing Fault Signals Based on Acoustic Metamaterials. IEEE Trans. Ind. Inform. 2022, 18, 6857–6864. [Google Scholar] [CrossRef]
- Shi, H.; Li, Y.; Bai, X.; Zhang, K.; Sun, X. A two-stage sound-vibration signal fusion method for weak fault detection in rolling bearing systems. Mech. Syst. Signal Process. 2022, 172, 109012. [Google Scholar] [CrossRef]
- Glowacz, A.; Tadeusiewicz, R.; Legutko, S.; Caesarendra, W.; Irfan, M.; Liu, H.; Brumercik, F.; Gutten, M.; Sulowicz, M.; Daviu, J.A.A. Fault diagnosis of angle grinders and electric impact drills using acoustic signals. Appl. Acoust. 2021, 179, 108070. [Google Scholar] [CrossRef]
- He, S.; Hu, D.; Yu, G.; Liao, A.; Shi, W. Trackside acoustic detection of axle bearing fault using wavelet domain moving beamforming method. Appl. Acoust. 2022, 195, 108851. [Google Scholar] [CrossRef]
- Yan, X.; Liu, Y.; Jia, M. A Feature Selection Framework-Based Multiscale Morphological Analysis Algorithm for Fault Diagnosis of Rolling Element Bearing. IEEE Access 2019, 7, 123436–123452. [Google Scholar] [CrossRef]
- Li, Y.; Li, G.; Yang, Y.; Liang, X.; Xu, M. A fault diagnosis scheme for planetary gearboxes using adaptive multi-scale morphology filter and modified hierarchical permutation entropy. Mech. Syst. Signal Process. 2018, 105, 319–337. [Google Scholar] [CrossRef]
- Deng, F.; Yang, S.; Tang, G.; Hao, R.; Zhang, M. Self adaptive multi-scale morphology AVG-Hat filter and its application to fault feature extraction for wheel bearing. Meas. Sci. Technol. 2017, 28, 045011. [Google Scholar] [CrossRef]
- Feng, Y.; Lu, B.; Zhang, D. Multiscale morphological manifold for rolling bearing fault diagnosis. Proc. Inst. Mech. Eng. Part C: J. Mech. Eng. Sci. 2016, 231, 3516–3529. [Google Scholar] [CrossRef]
- Lv, J.; Yu, J. Average combination difference morphological filters for fault feature extraction of bearing. Mech. Syst. Signal Process. 2018, 100, 827–845. [Google Scholar] [CrossRef]
- Li, Y.; Liang, X.; Zuo, M.J. A new strategy of using a time-varying structure element for mathematical morphological filtering. Measurement 2017, 106, 53–65. [Google Scholar] [CrossRef]
- Chen, Z.; Gao, N.; Sun, W.; Chen, Q.; Yan, F.; Zhang, X.; Iftikhar, M.; Liu, S.; Ren, Z. A Signal Based Triangular Structuring Element for Mathematical Morphological Analysis and Its Application in Rolling Element Bearing Fault Diagnosis. Shock. Vib. 2014, 2014, 590875. [Google Scholar] [CrossRef]
- Hu, Z.; Wang, C.; Zhu, J.; Liu, X.; Kong, F. Bearing fault diagnosis based on an improved morphological filter. Measurement 2016, 80, 163–178. [Google Scholar] [CrossRef]
- Li, B.; Zhang, P.L.; Wang, Z.J.; Mi, S.S.; Liu, D.S. A weighted multi-scale morphological gradient filter for rolling element bearing fault detection. ISA Trans. 2011, 50, 599–608. [Google Scholar] [CrossRef] [PubMed]
- Woo, S.; Park, J.; Lee, J.Y.; Kweon, I.S. CBAM: Convolutional Block Attention Module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 3–19. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on computer vision and pattern recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Vulli, A.; Srinivasu, P.N.; Sashank, M.S.K.; Shafi, J.; Choi, J.; Ijaz, M.F. Fine-Tuned DenseNet-169 for Breast Cancer Metastasis Prediction Using FastAI and 1-Cycle Policy. Sensors 2022, 22, 2988. [Google Scholar] [CrossRef] [PubMed]
- Wan, L.; Chen, Y.; Li, H.; Li, C. Rolling-Element Bearing Fault Diagnosis Using Improved LeNet-5 Network. Sensors 2020, 20, 1693. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).