
Study on Impact Process of a Large LNG Tank Container for Trains
Abstract
:1. Introduction
2. Experiment Measurement
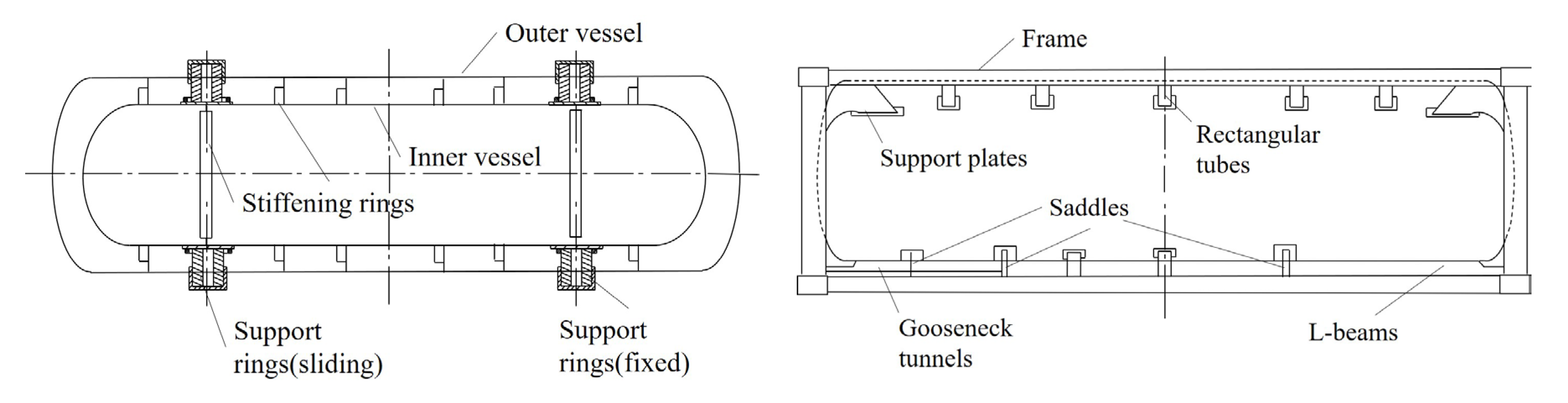
2.1. Structure of the Studied Tank Container
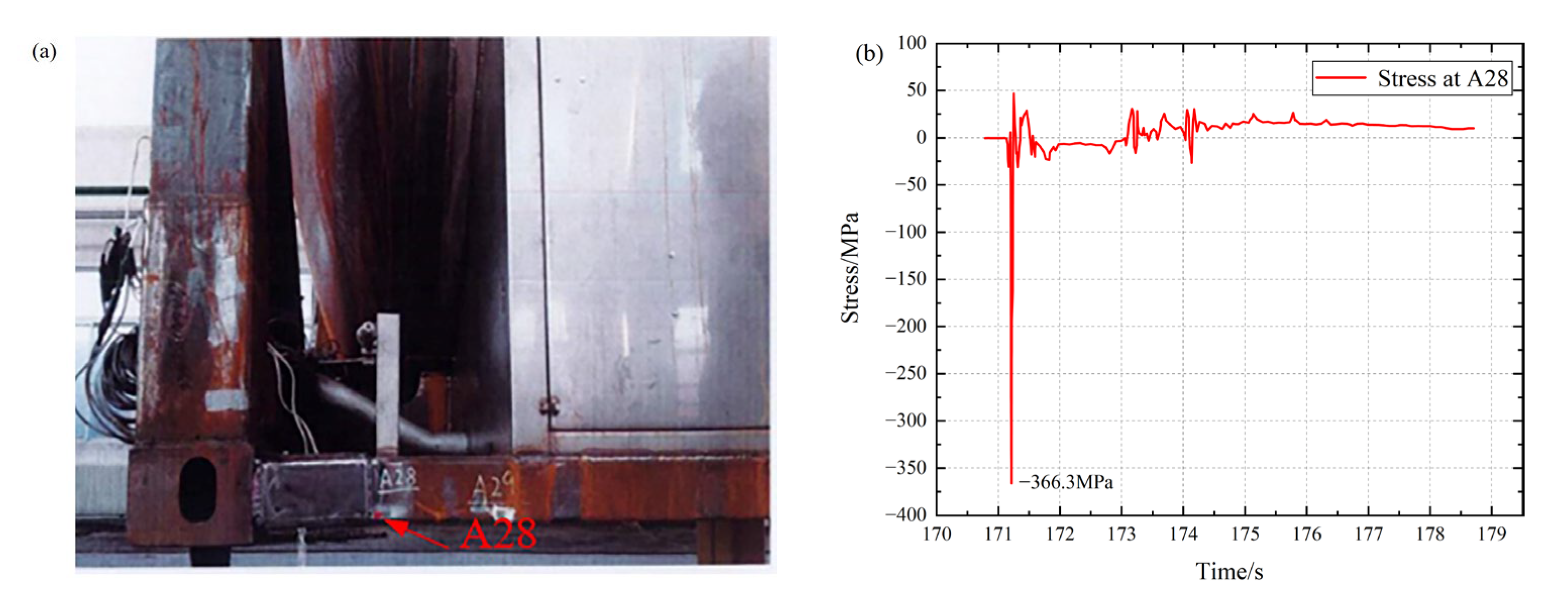
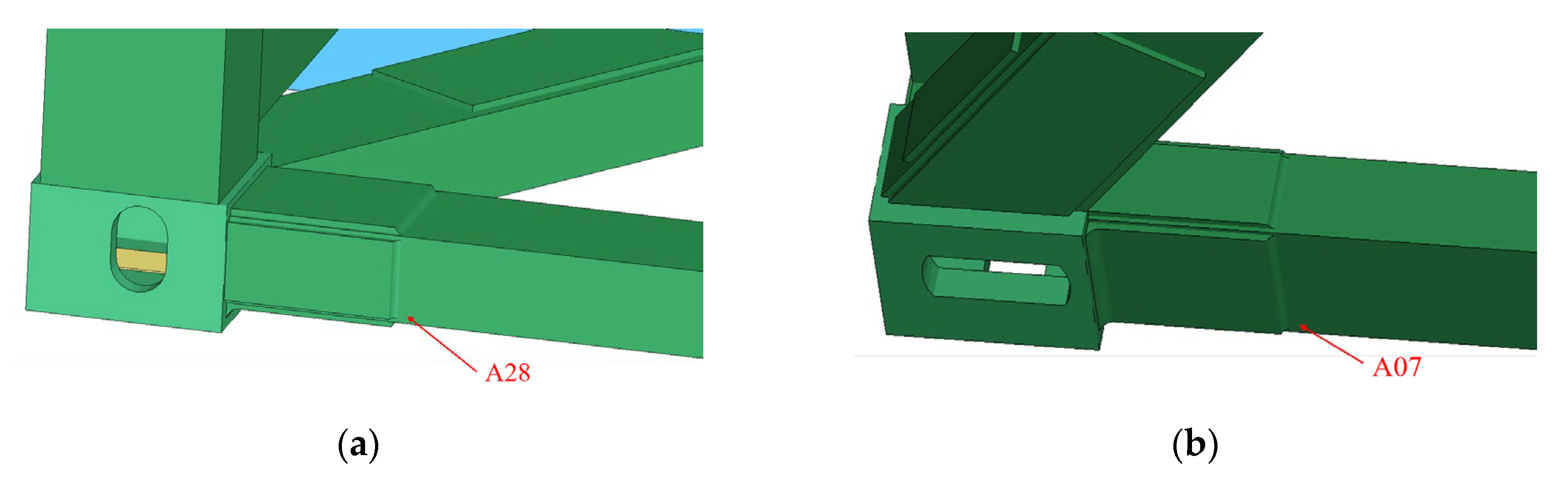
2.2. Impact Strength Test
3. Numerical Simulations
3.1. Basic Algorithm
3.2. Material Model
3.3. Modeling and Meshing
3.4. Loading and Boundary Condition
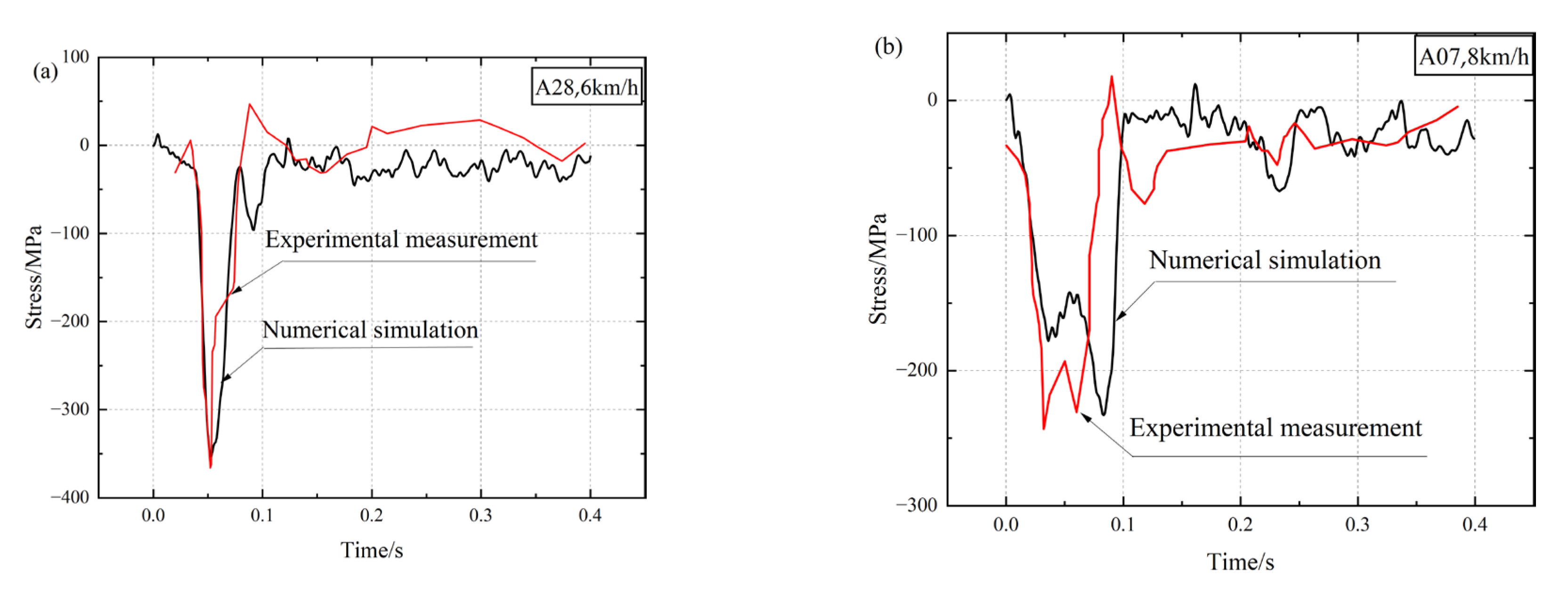
3.5. Model Verification
4. Results and Discussion
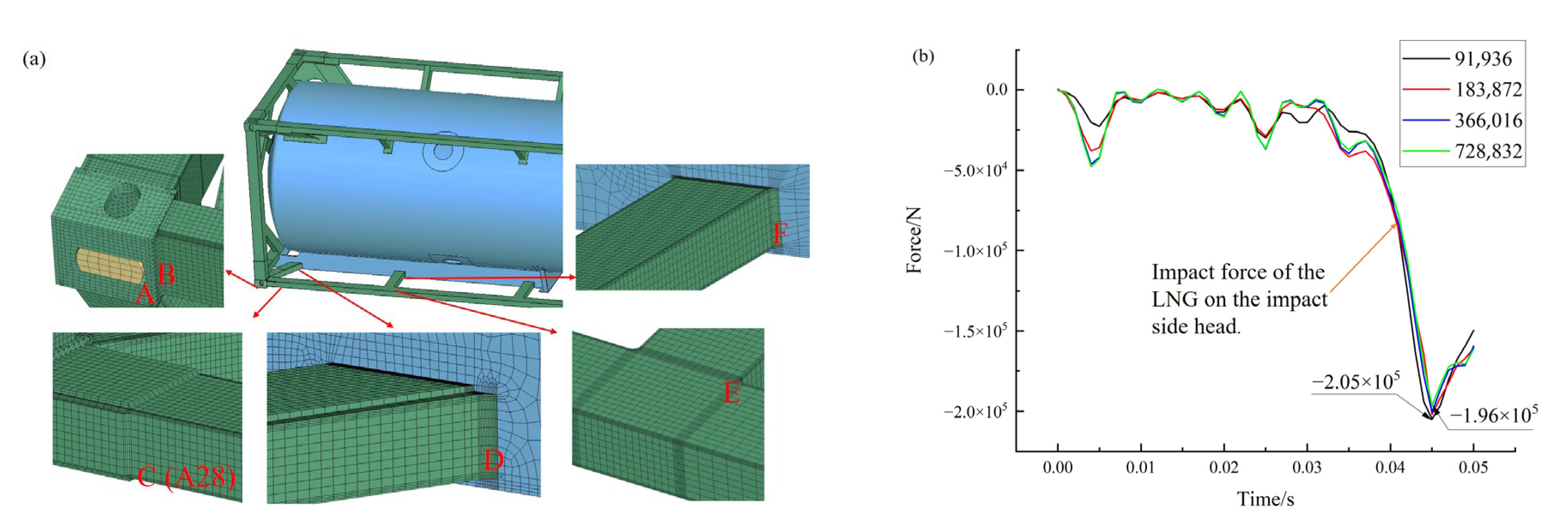
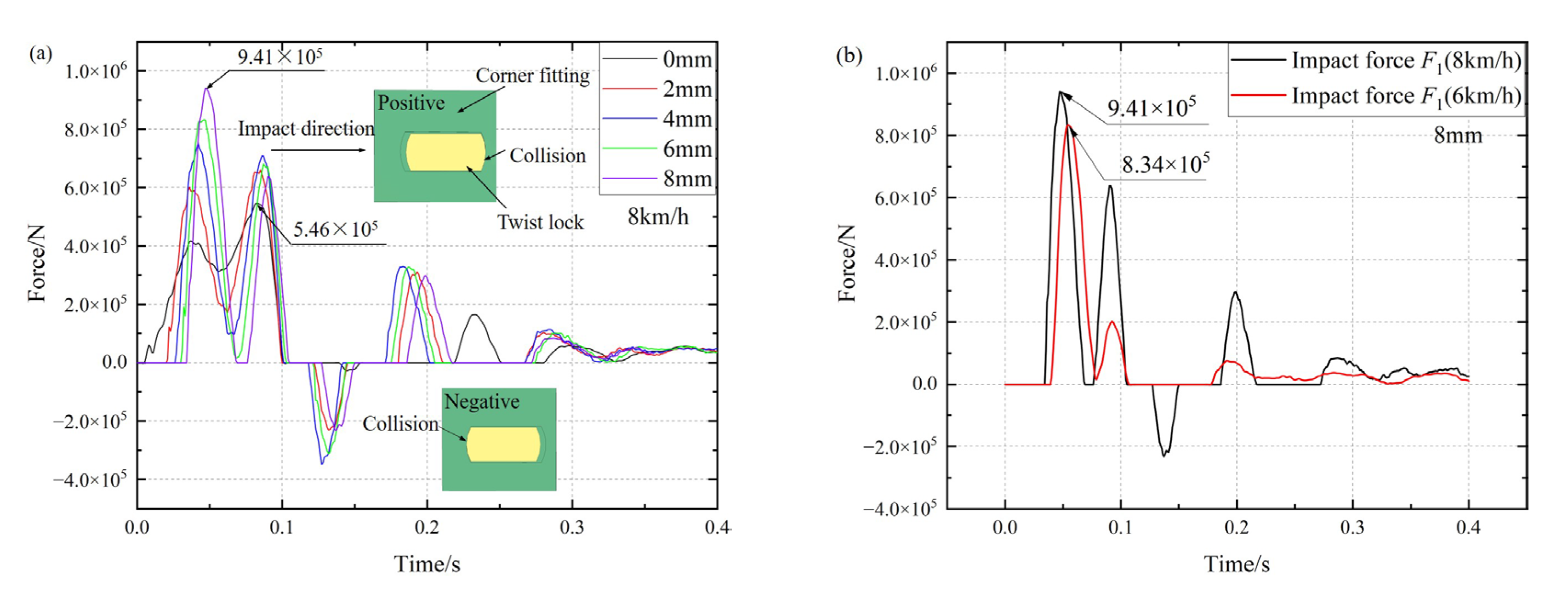
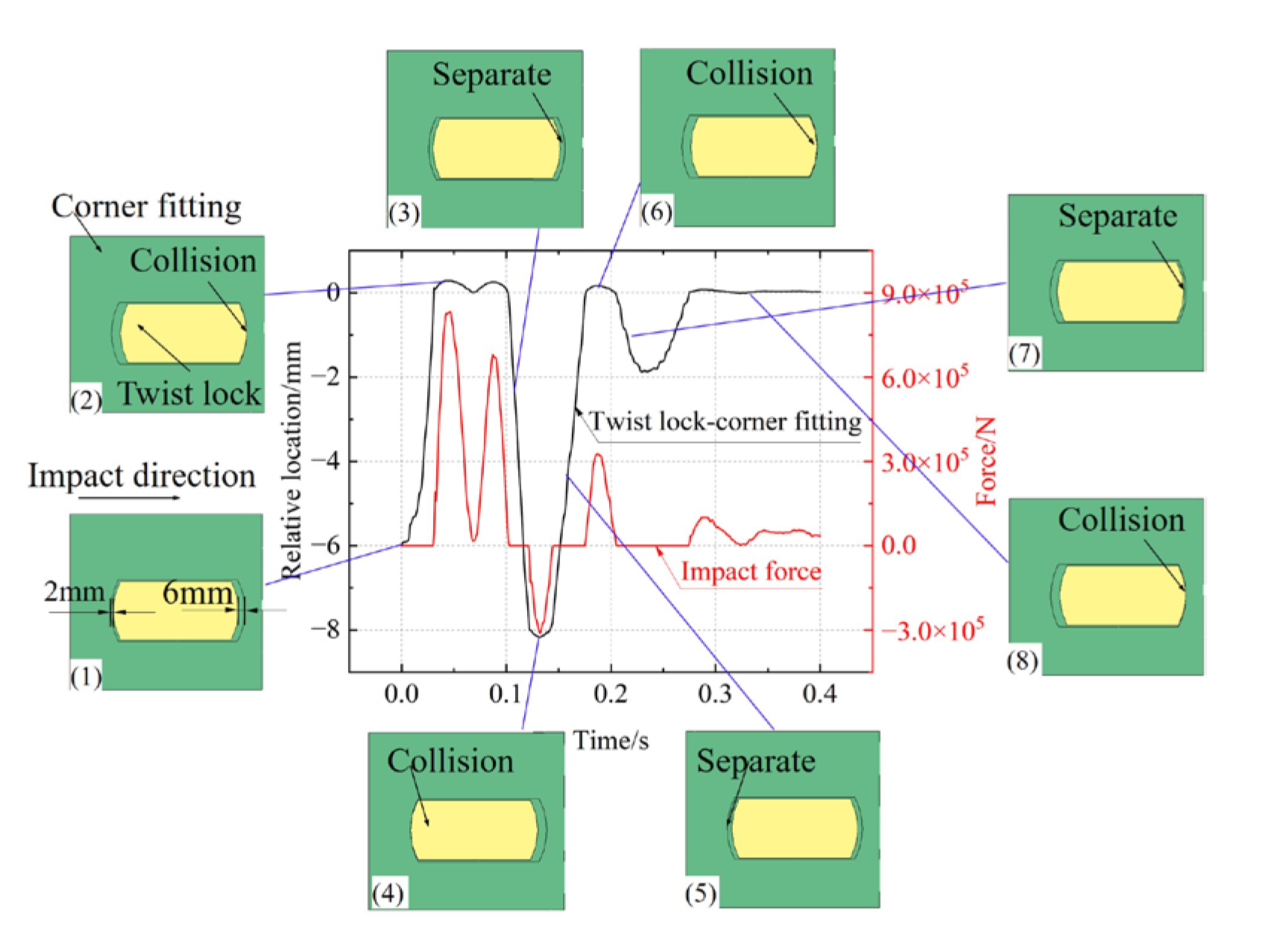
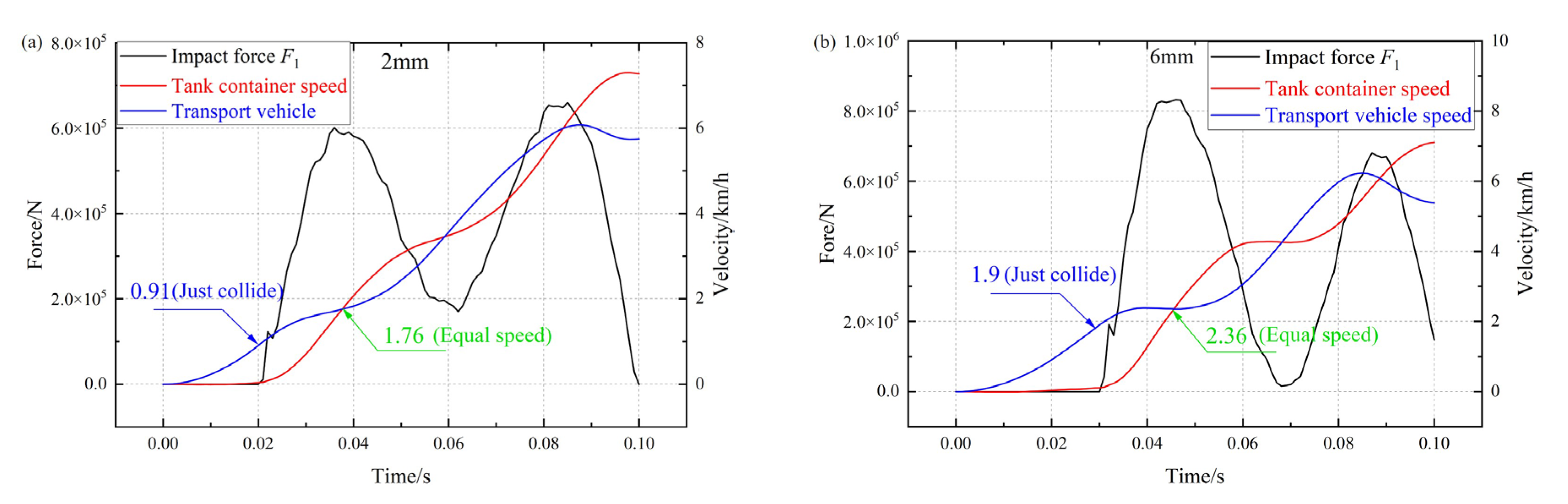
4.1. Impact Force
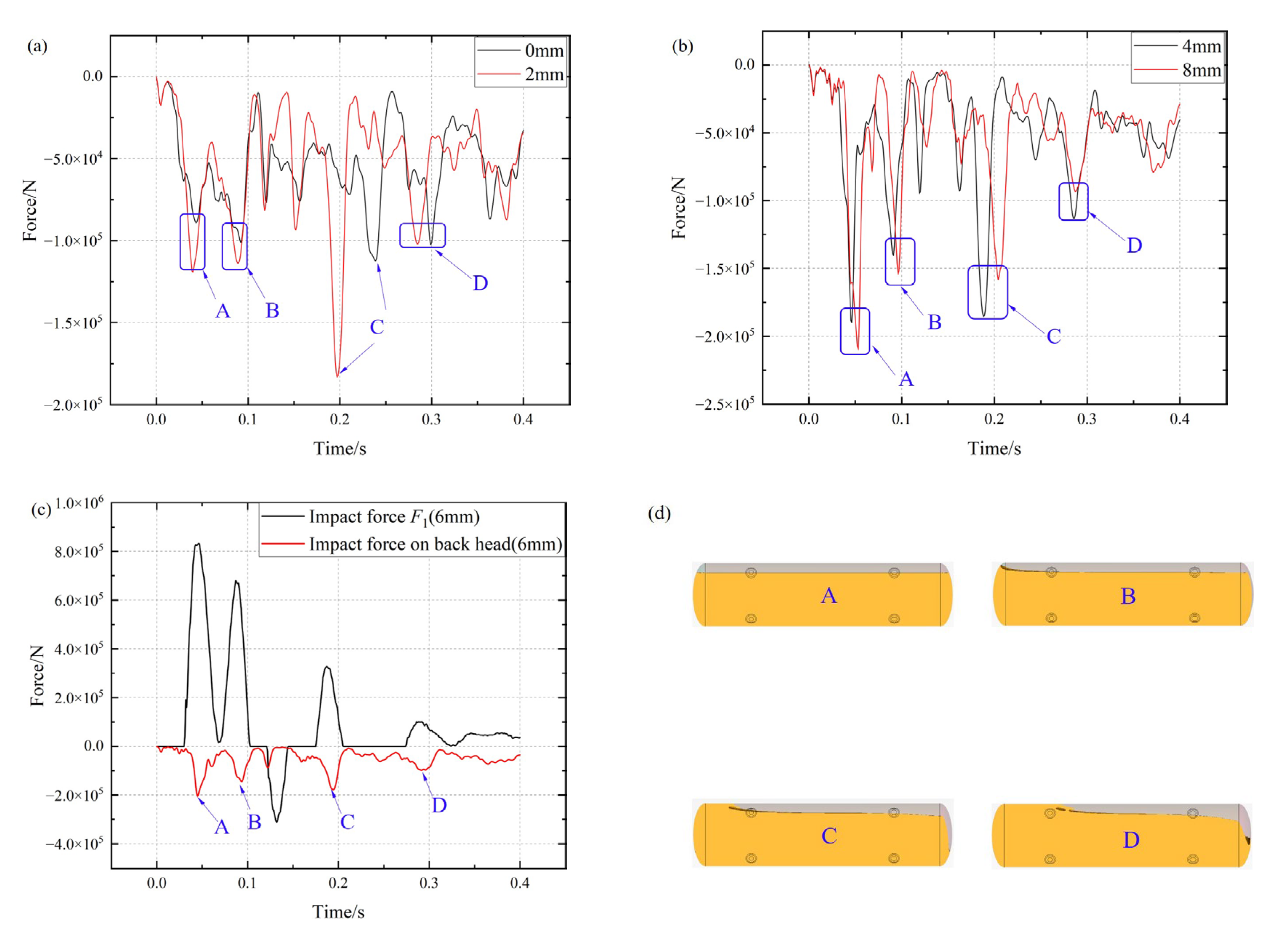
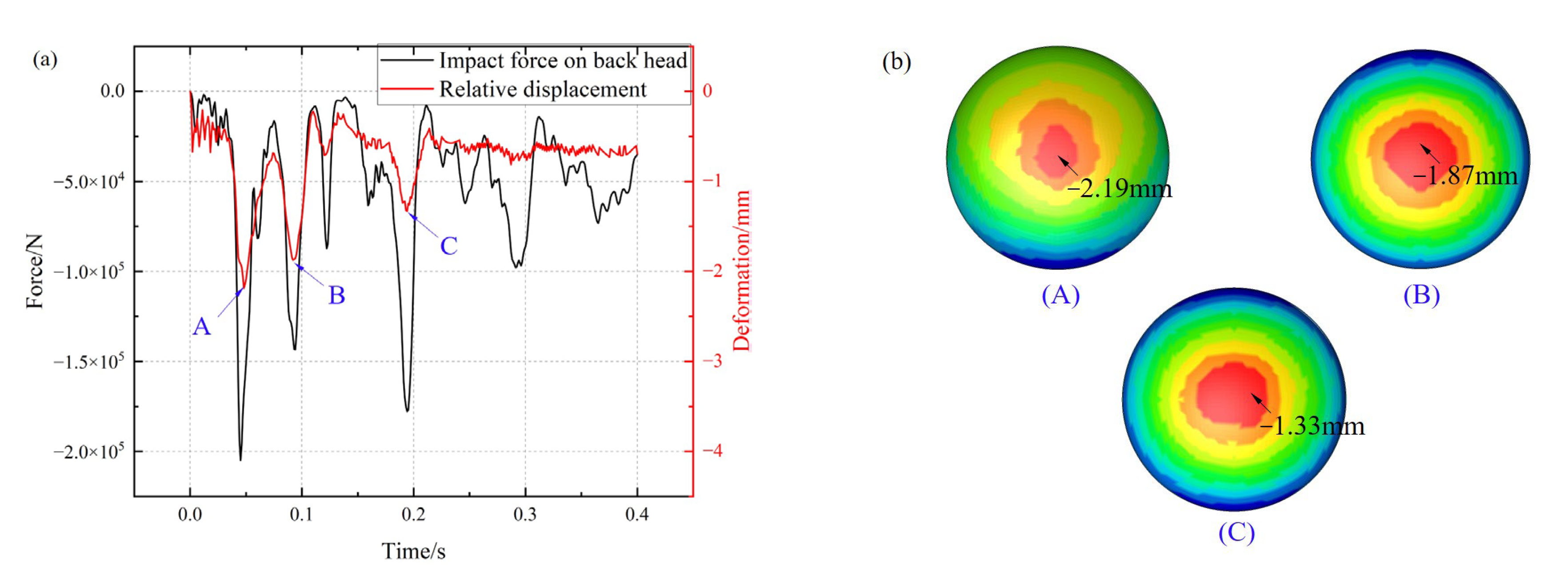
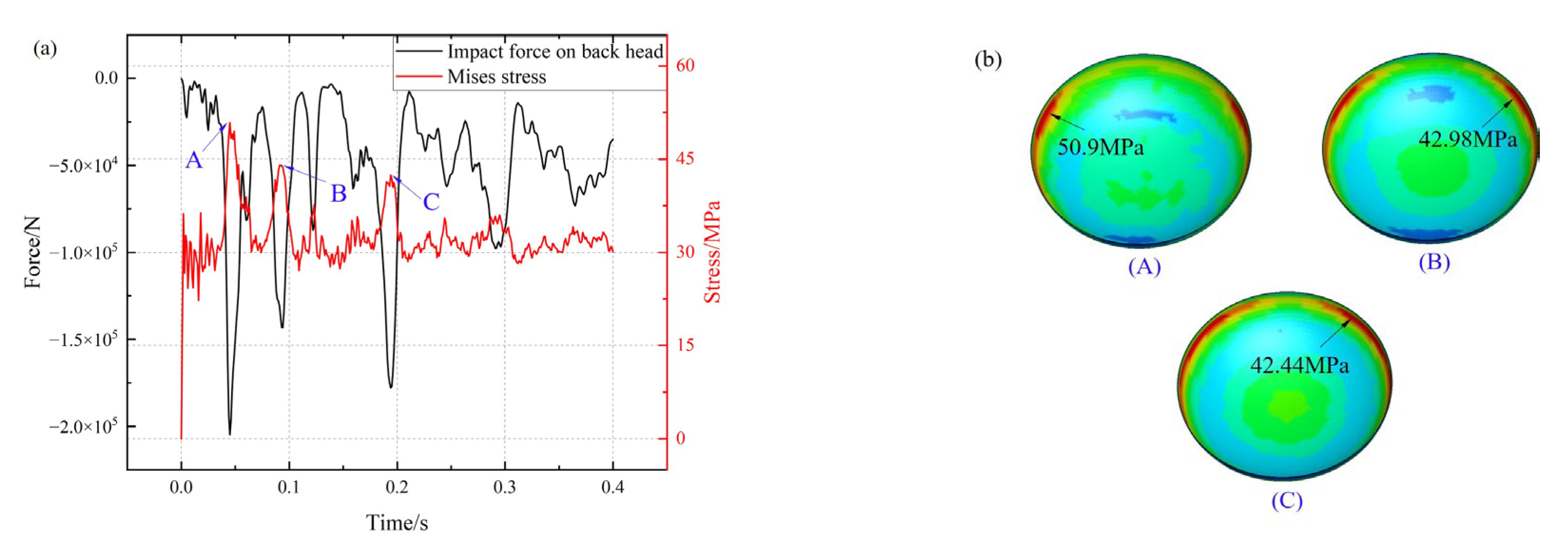
4.2. Influence of LNG Impact Force on Back Head
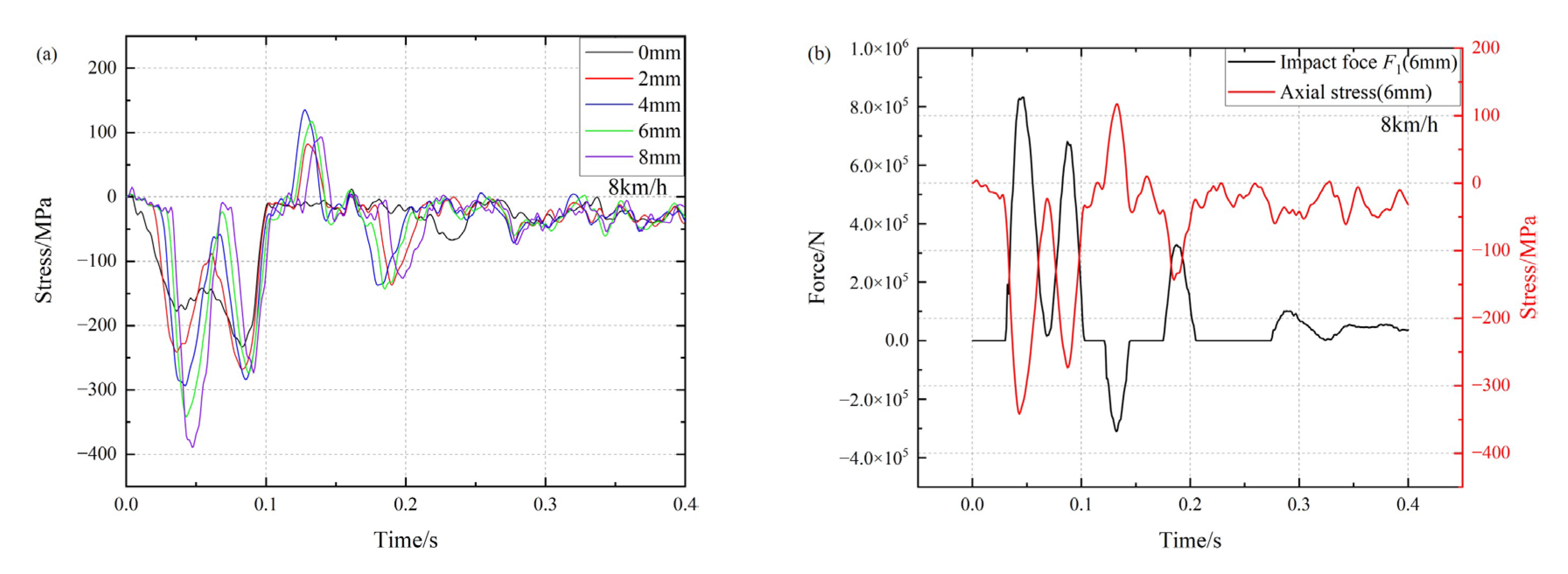
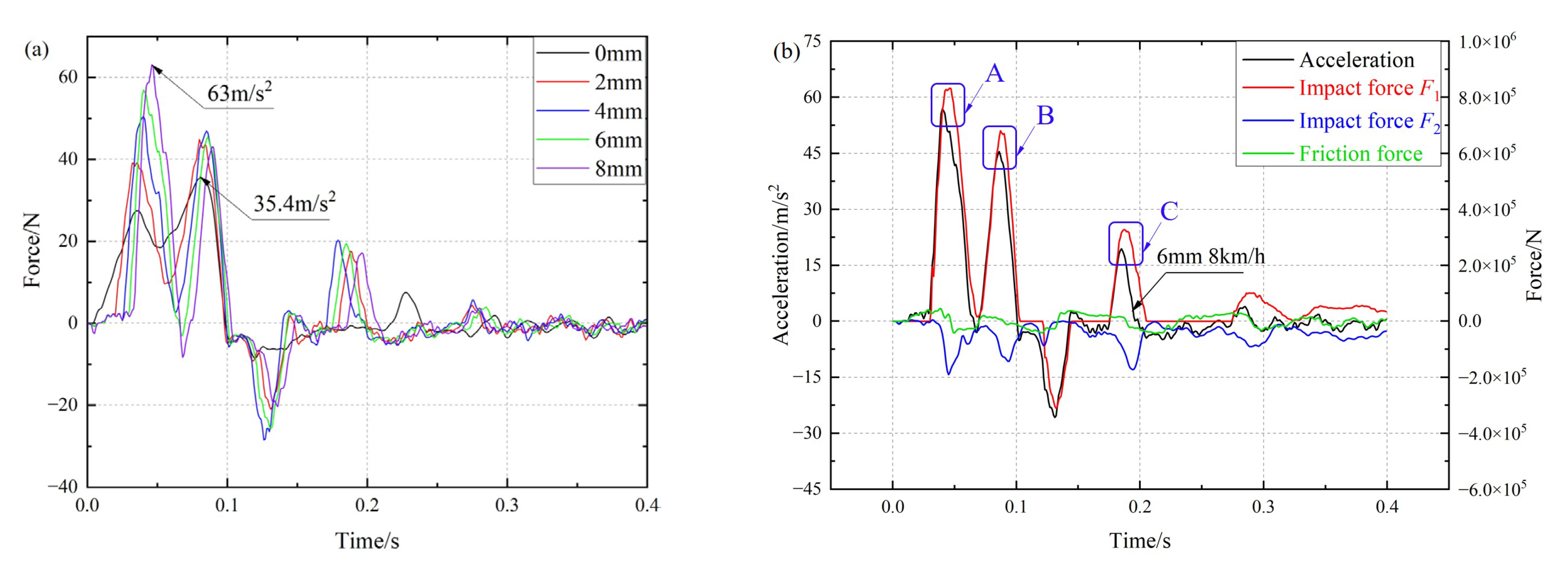
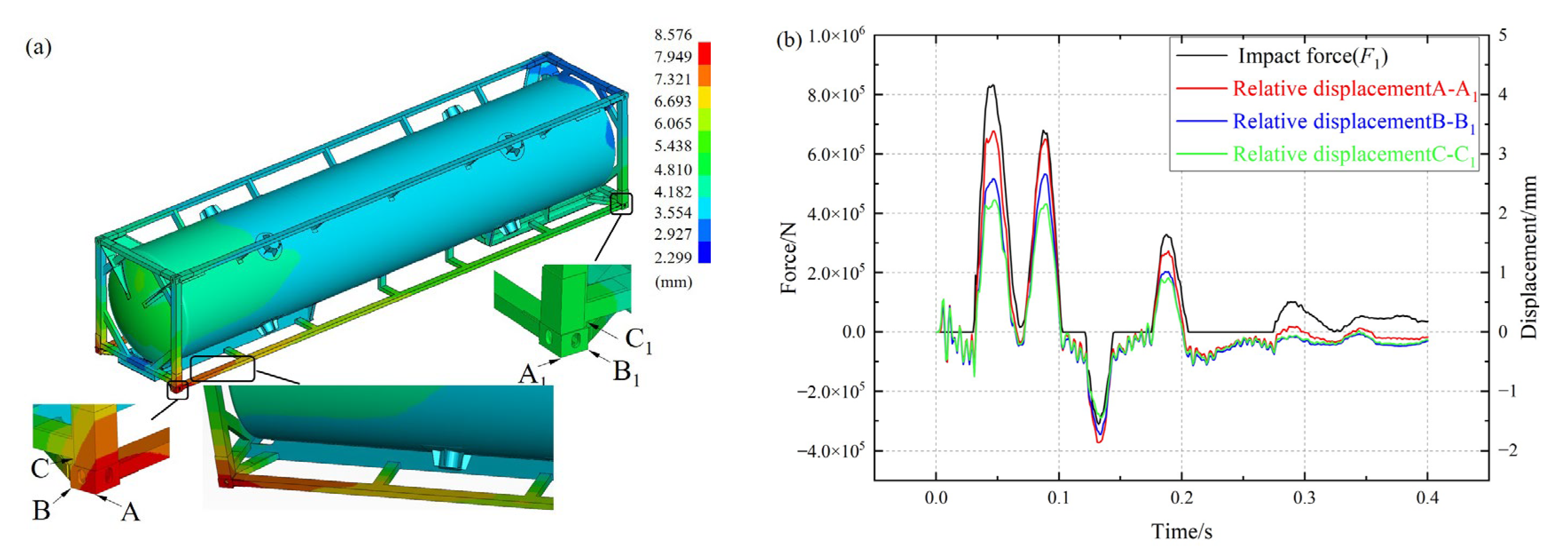
4.3. Influence of Impact Force F1 on Frame
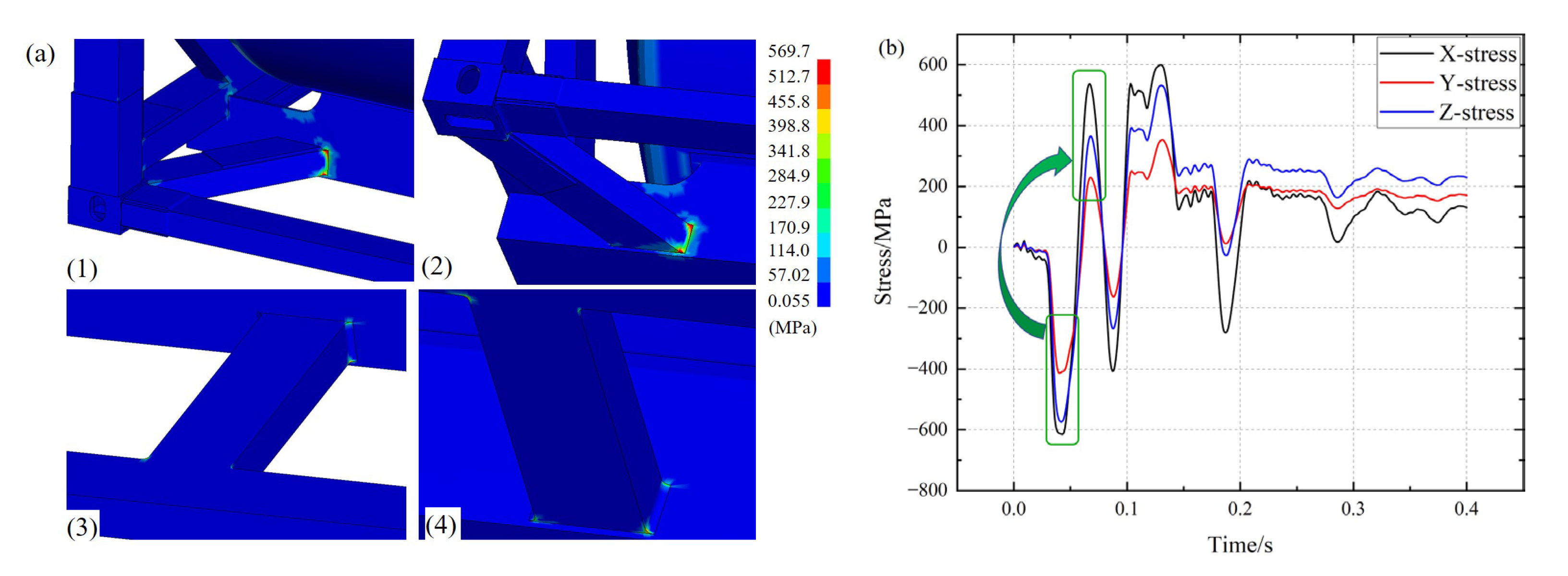
- At stage A, there is no F1. Gravity has a significant role in determining the frame Mises stress, which is in the elastic range.
- Multiple impacts in stage B produce multiple stress peaks exceeding the yield strength (450 MPa). Peak value 1 is produced by the F1 reaching its first peak value, and as can be seen in the Figure 22, there are many locations with high stress. With the exception of the chamfer, where residual stress causes high stress and a change in the stress state from compression to tension, as shown in Figure 23, the stress in other locations is low at peak value 2 in compared to the first peak. Comparable to peak values 1 and 2, peak value 3 and 4 have similar characteristics.
- 3.
- Although stage C do not have F1, the maximum Mises stress is larger than the maximum Mises stress at stage A because of the residual stress at the chamfer. Stage D’s F1 is low and has little effect on the stress distribution.
5. Conclusions
- The impact process of a large LNG tank container for trains was conducted experimentally and stresses on the container especially on the frame were measured with time. For the initial velocity of 6.1 km/h, the maximum compressive stress is −366.3 MPa occurring on the longitudinal beam near the impact side corner fittings.
- The impact force produced by the transport vehicle is influenced by both the initial clearance and initial velocity, i.e., its maximum value increases with the clearance or velocity, which in turn directly affects the LNG impact force on the head, the tank container axial acceleration at the mass center and the frame deformation and stress distribution. This result is valuable for the design of the corner fittings and frames of the container.
- The largest average pressure brought on by the LNG impact force is 0.053 MPa, or 8.83% of the 0.6 MPa design pressure, so the inner vessel should be designed with a thickness allowance. When the initial velocity is 8 km/h, the ratio of the maximum LNG impact force on the back head to the static inertia force at each clearance is less than 0.23, which means that the calculation method of LNG static inertia force is conservative. This result may be helpful for the design of the thickness of container.
- When the initial velocity is 8 km/h and the initial clearance is 8 mm, the maximum axial acceleration of the tank container is 63 m/s2, greater than 4g inertial acceleration specified in the container design standard, meaning if assessed by the impact, the specifications of the standard are not conservative. This conclusion may provide reference for the editing or revision of the container design standard.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Goudarzi, M.A.; Sabbagh-Yazdi, S.R.; Marx, W. Investigation of sloshing damping in baffled rectangular tanks subjected to the dynamic excitation. Bull. Earthq. Eng. 2009, 8, 1055–1072. [Google Scholar] [CrossRef]
- Akyildiz, H.; Uenal, N.E. Sloshing in a three-dimensional rectangular tank: Numerical simulation and experimental validation. Ocean. Eng. 2006, 33, 2135–2149. [Google Scholar] [CrossRef]
- Anghileri, M.; Castelletti, L.; Tirelli, M. Fluid–structure interaction of water filled tanks during the impact with the ground. Int. J. Impact Eng. 2005, 31, 235–254. [Google Scholar] [CrossRef]
- Zhang, A.N.; Suzuki, K. A comparative study of numerical simulations for fluid–structure interaction of liquid-filled tank during ship collision. Ocean. Eng. 2007, 34, 645–652. [Google Scholar] [CrossRef]
- Aquelet, N.; Souli, M.; Gabrys, J.; Olovson, L. A new ALE formualtion for sloshing analysis. Struct. Eng. Mech. 2003, 16, 423–440. [Google Scholar] [CrossRef] [Green Version]
- Nasar, T.; Sannasiraj, S.A.; Sundar, V. Experimental study of liquid sloshing dynamics in a barge carrying tank. Fluid Dyn. Res. 2008, 40, 427. [Google Scholar] [CrossRef]
- Liu, D.M.; Lin, P.Z. A numerical study of three-dimensional liquid sloshing in tanks. J. Comput. Phys. 2008, 227, 3921–3939. [Google Scholar] [CrossRef]
- Kang, N.; Liu, K. Influence of baffle position on liquid sloshing, during braking and turning of a tank truck. J. Zhejiang Univ. A 2010, 11, 317–324. [Google Scholar] [CrossRef]
- Cao, Y.; Jin, X.L. Dynamic response of flexible container during the impact with the ground. Int. J. Impact Eng. 2010, 37, 999–1007. [Google Scholar] [CrossRef]
- Ibrahim, R.A. Assessment of breaking waves and liquid sloshing impact. Nonlinear Dyn. 2020, 100, 1837–1925. [Google Scholar] [CrossRef]
- Jung, J.H.; Yoon, H.S.; Lee, C.Y.; Shin, S.C. Effect of the vertical baffle height on the liquid sloshing in a three-dimensional rectangular tank. Ocean Eng. 2012, 44, 79–89. [Google Scholar] [CrossRef]
- Zhang, Z.L.; Khalid, M.S.U.; Long, T.; Chang, J.Z.; Liu, M.B. Investigations on sloshing mitigation using elastic baffles by coupling smoothed finite element method and decoupled finite particle method. J. Fluids Struct. 2020, 94, 102942. [Google Scholar] [CrossRef]
- Sauer, M. Simulation of high velocity impact in fluid-filled containers using finite elements with adaptive coupling to smoothed particle hydrodynamics. Int. J. Impact Eng. 2011, 38, 511–520. [Google Scholar] [CrossRef]
- Pal, N.C.; Bhattacharyya, S.; Sinha, P.K. Non-linear coupled slosh dynamics of liquid-filled laminated composite containers: A two dimensional finite element approach. J. Sound Vib. 2003, 261, 729–749. [Google Scholar] [CrossRef]
- Reed, P.E.; Breedveld, G.; Lim, B.C. Simulation of the drop impact test for moulded thermoplastic containers. Int. J. Impact Eng. 2000, 24, 133–153. [Google Scholar] [CrossRef]
- Wang, W.Y.; Peng, Y.; Zhang, Q.; Ren, L.; Jiang, Y. Sloshing of liquid in partially liquid filled toroidal tank with various baffles under lateral excitation. Ocean Eng. 2017, 146, 434–456. [Google Scholar] [CrossRef]
- Tiernan, S.; Fahy, M. Dynamic FEA modelling of ISO tank containers. J. Mater. Process. Technol. 2002, 124, 126–132. [Google Scholar] [CrossRef]
- Dai, L.; Xu, L.; Setiawan, B. A new non-linear approach to analysing the dynamic behaviour of tank vehicles subjected to liquid sloshing. Proc. Inst. Mech. Eng. Part K J. Multi-body Dyn. 2005, 219, 75–86. [Google Scholar] [CrossRef]
- Li, J.G.; Hamamoto, Y.; Liu, Y.; Zhang, X. Sloshing impact simulation with material point method and its experimental validations. Comput. Fluids 2014, 103, 86–99. [Google Scholar] [CrossRef]
- Wu, W.F.; Zhen, C.W.; Lu, J.S.; Tu, J.Y.; Zhang, J.W.; Yang, Y.B.; Zhu, K.B.; Duan, J.X. Experimental study on characteristic of sloshing impact load in elastic tank with low and partial filling under rolling coupled pitching. Int. J. Nav. Arch. Ocean Eng. 2020, 12, 178–183. [Google Scholar] [CrossRef]
- Kim, Y. Numerical simulation of sloshing flows with impact load. Appl. Ocean Res. 2001, 23, 53–62. [Google Scholar] [CrossRef]
- Bendarma, A.; Jankowiak, T.; Rusinek, A.; Lodygowski, T.; Klosak, M. Perforation Tests of Aluminum Alloy Specimens for a Wide Range of Temperatures Using High-Performance Thermal Chamber-Experimental and Numerical Analysis. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2019; Volume 491, p. 012027. [Google Scholar]
- Kpenyigba, K.M.; Jankowiak, T.; Rusinek, A.; Pesci, R. Influence of projectile shape on dynamic behavior of steel sheet subjected to impact and perforation. Thin-Walled Struct. 2013, 65, 93–104. [Google Scholar] [CrossRef] [Green Version]
- Bendarma, A.; Jankowiak, T.; Łodygowski, T.; Rusinek, A.; Klósak, M. Experimental and numerical analysis of the aluminum alloy AW5005 behavior subjected to tension and perforation under dynamic loading. J. Theor. Appl. Mech. 2017, 55, 1219–1233. [Google Scholar] [CrossRef] [Green Version]
- Song, T.T. Research on Q450NQR1 High Strength Sheet Metal forming Springback and Application of Shallow Drawing. Diploma Thesis, Shandong University, Jinan, China, 2011. [Google Scholar]
- Pan, J.H.; Chen, Z.; Hong, Z.Y. A novel method to estimate the fracture toughness of pressure vessel ferritic steels in the ductile to brittle transition region using finite element analysis and Master Curve method. Int. J. Press. Vessel. Pip. 2019, 176, 103949. [Google Scholar] [CrossRef]
- Han, Y. Study on Technique of Cold Stretched Austenitic Stainless Steel Pressure Vessle and Its Performance Evaluation in Typical Media Environment. Diploma Thesis, Hefei University of Technology, Hefei, China, 2012. [Google Scholar]
- Mi, L. Research on Numerical Simulation of Impact Test on Railway Vehicles. Diploma Thesis, Beijing Jiaotong University, Beijing, China, 2014. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value | Item | Value |
|---|---|---|---|
| Specified filling rate | 90% | Material of the 8 support rings | GFRP |
| Design pressure of the inner vessel | 0.6 MPa | Material of the inner vessel | S30408 (solution treatment) |
| Design temperature of the inner vessel | −196 °C | Material of the outer vessel | 16MnDR (normalizing) |
| Design pressure of the jacket | −0.1 MPa | Material of the frame | Q450NQR1 (normalizing) |
| Design temperature of the jacket | 50 °C | Corrosion allowance | 0 |
| Item | Density (t/mm3) | Elastic Modulus (MPa) | Poisson’s Ratio |
|---|---|---|---|
| Impact vehicle | 0.115 × 10−4 | 0.201 × 106 | 0.3 |
| Transport vehicle | 0.295 × 10−8 | 0.201 × 106 | 0.3 |
| Twist lock | 0.785 × 10−8 | 0.201 × 106 | 0.3 |
| Corner fitting | 0.785 × 10−8 | 0.201 × 106 | 0.3 |
| GFRP | 0.185 × 10−8 | 0.720 × 105 | 0.26 |
| Item | Value | Item | Value |
|---|---|---|---|
| Temperature (°C) | −161.87 | (J/kg·k) | 2056.3 |
| Pressure (MPa) | 0.1 | (1/Pa) | 2.22 × 10−9 |
| Density (kg/m3) | 460 | (1/K) | 0.00346 |
| Sound velocity (m/s) | 1341.3 | 1.648 | |
| Viscosity (MPa·s) | 0.118 × 10−9 |
| Item | Impact Vehicle | Transport Vehicle | Tank Container | LNG (90%) |
|---|---|---|---|---|
| Mass (t) | 92.0 | 23.0 | 12.9 | 18.9 |
| Clearance (mm) | Acceleration (m/s2) | Fmax (N) | (MPa) | (N) | ||
|---|---|---|---|---|---|---|
| 0 | 35.4 | 1.12 × 105 | 0.028 | 6.69 × 105 | 0.167 | 7.887 |
| 2 | 43.9 | 1.83 × 105 | 0.046 | 8.29 × 105 | 0.221 | 12.887 |
| 4 | 50.5 | 1.90 × 105 | 0.048 | 9.54 × 105 | 0.199 | 13.380 |
| 6 | 56.9 | 2.05 × 105 | 0.052 | 1.07 × 106 | 0.192 | 14.437 |
| 8 | 63.1 | 2.10 × 105 | 0.053 | 1.19 × 106 | 0.177 | 14.789 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Qian, C.; Li, W. Study on Impact Process of a Large LNG Tank Container for Trains. Appl. Sci. 2023, 13, 1351. https://doi.org/10.3390/app13031351
Wang Z, Qian C, Li W. Study on Impact Process of a Large LNG Tank Container for Trains. Applied Sciences. 2023; 13(3):1351. https://doi.org/10.3390/app13031351
Chicago/Turabian StyleWang, Zhiqiang, Caifu Qian, and Wei Li. 2023. "Study on Impact Process of a Large LNG Tank Container for Trains" Applied Sciences 13, no. 3: 1351. https://doi.org/10.3390/app13031351