
Robotics in Search and Rescue (SAR) Operations: An Ethical and Design Perspective Framework for Response Phase


Abstract
:1. Introduction
- what are the ethical issues in using robotic and cognitive technologies for SAR?
- what ethical challenges to consider during the development process of SAR robots (i.e., snake robots)?
- what set of guidelines or framework to follow while using robots for SAR?
2. Background
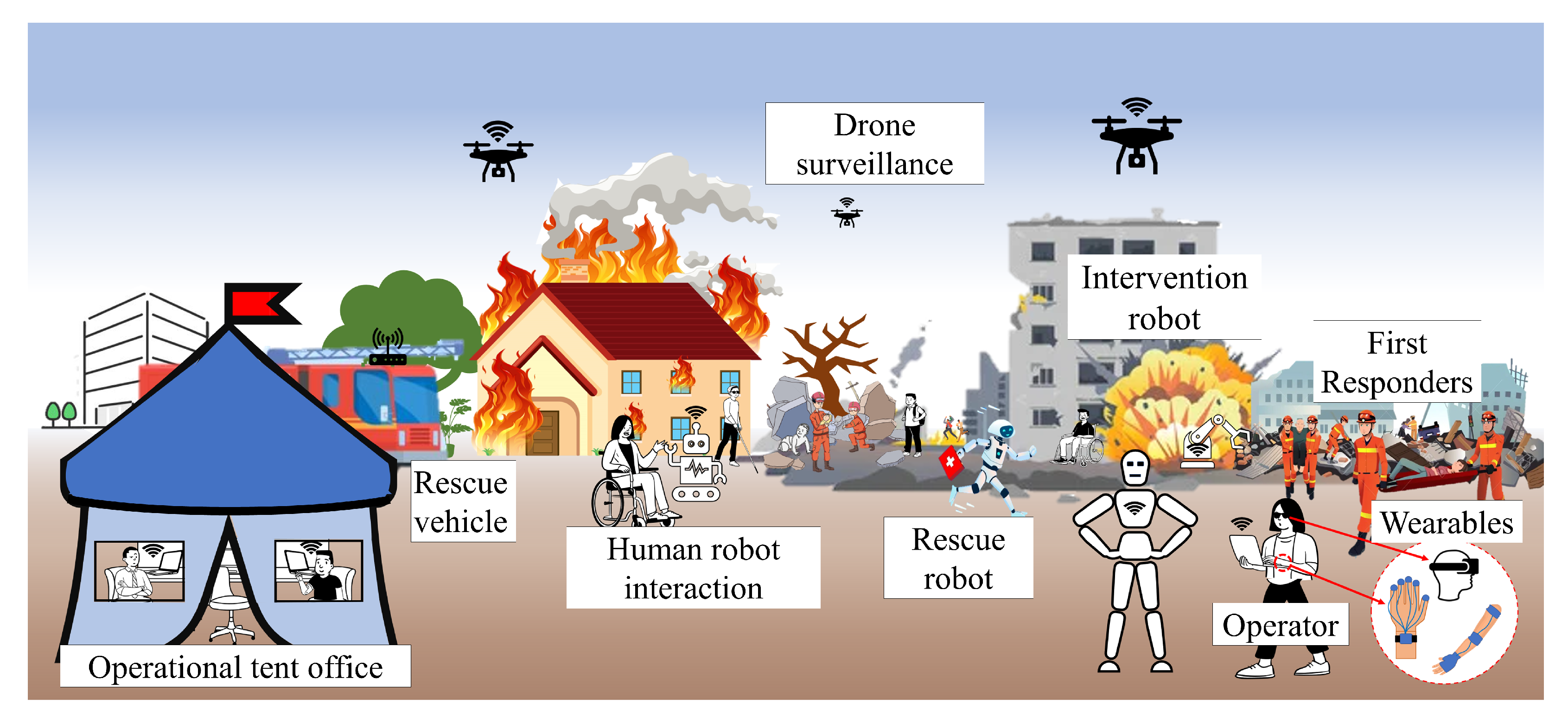
2.1. Search and Rescue (SAR)
2.2. Ethical Issues with Robotic Applications
- First Law. A robot may not injure a human being or, through inaction, allow a human being to come to harm.
- Second Law. A robot must obey the orders given to it by human beings except where such orders would conflict with the First Law.
- Third Law. A robot must protect its own existence as long as such protection does not conflict with the First or Second Law.
- Zeroth Law. A robot may not injure humanity, or through inaction, allow humanity to come to harm.
- Regulating robot design, production through law.
- Regulating user behaviour through the robot’s design.
- Regulating the effects of robot behaviour through law.
- Regulating robot behaviour through code.
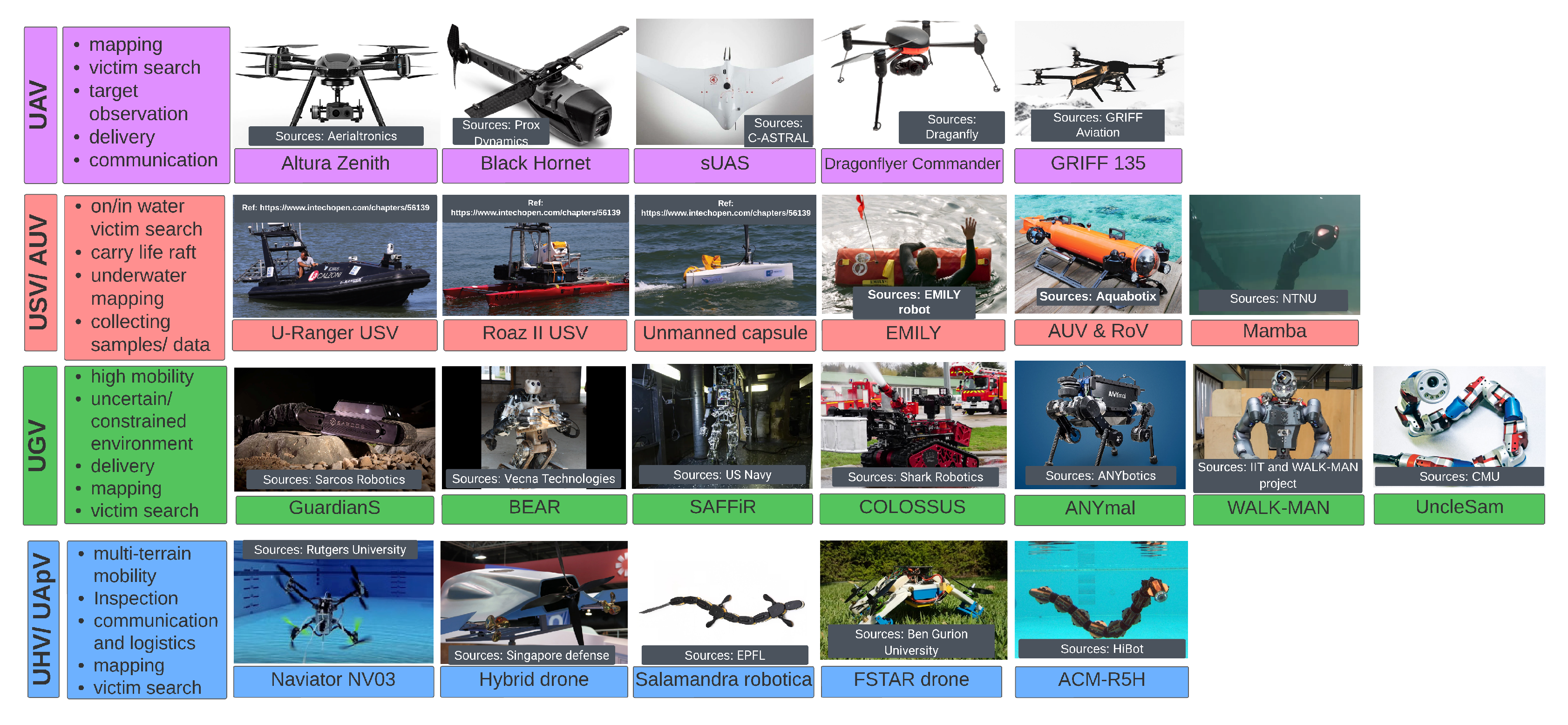
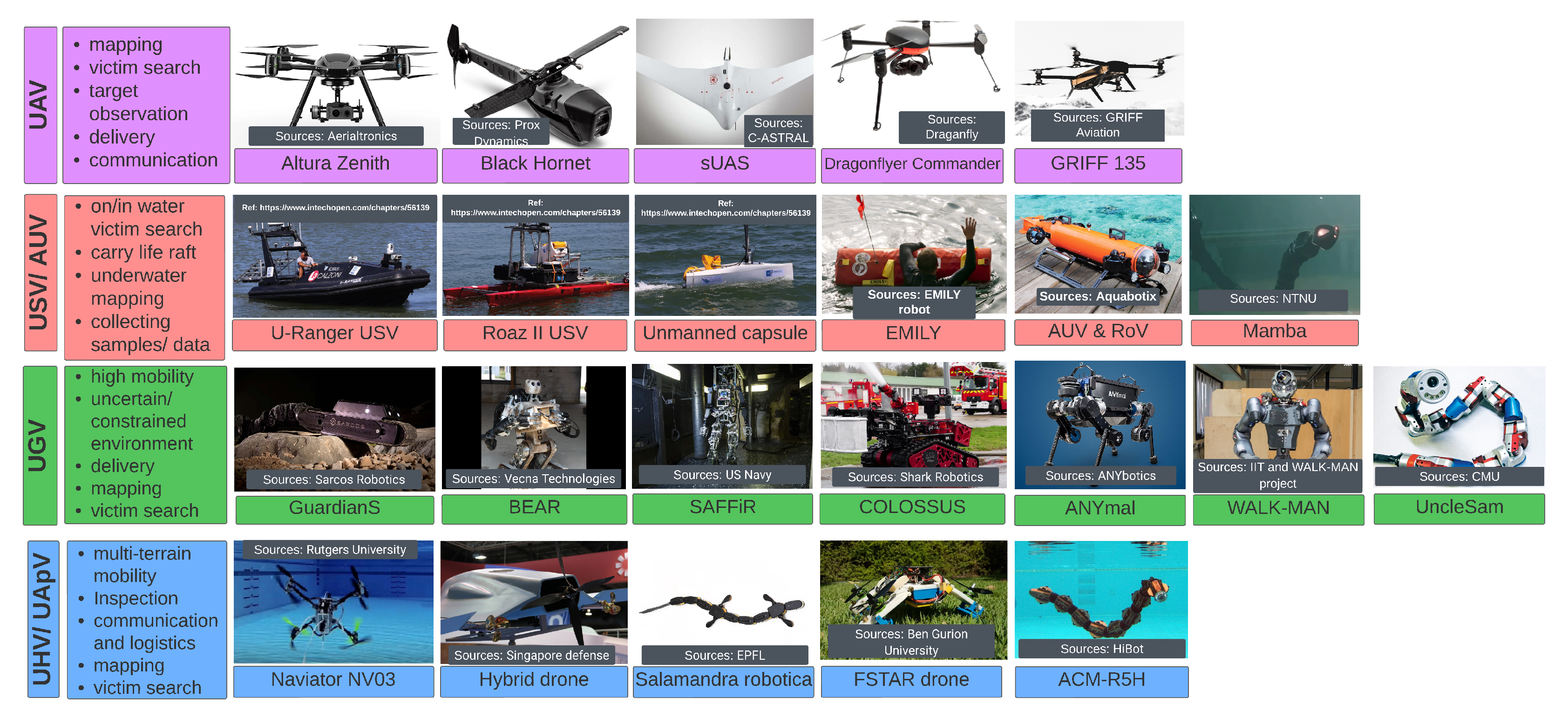
2.3. Robots in SAR
3. Snake Robot in SAR
3.1. Human Perception of Robot and Its Interaction
3.2. Snake Robot in Rescue Team and Its Communication
3.3. Popular Snake Robots and Effectiveness Metrics
4. Snake Robot Ethical Issues in SAR Response Phase
4.1. Autonomy
- Operation level:Any SAR situation will require varying technology levels of operation, from remotely controlled to fully autonomous. The application of the level of autonomy in various contexts raises philosophical issues. For instance, is remote control of robotic operations preferable to full autonomy in a precarious situation? Therefore, it is difficult for stakeholders and operators to select the appropriate level of autonomy without endangering the victims. During the ethical examination, looking into these issues is crucial.
- Equality:Robots can make their own decisions and communicate through voice and facial features thanks to advances in cognitive technology. Can people then treat robots identically to how they treat living beings? Especially during SAR, victims need someone to communicate their emotions with when they are going through various emotional breakdowns. If a robot interacts with the victim during SAR, can he/she still be able to share the same emotions with the robot? With its many gaits, the snake robot especially carries the risk of frightening the victims and alienating them from engagement. How does it alter the victim’s perspective?
- Responsibility:No matter how the robot operates, its activities are very delicate and could risk human life (i.e., remote or autonomous). In early research, there was a lot of ethical debate over who should be held responsible for robot activities. For instance, in a remote robotic operation, the stress of SAR may make it impossible for the human rescue team to provide proper instructions to the robot. If the victim experiences terrible consequences, who will be held responsible? There is still room for discussion on the viability of full autonomy and its role in robotic rescue missions.
- Rights:There are certain morally accepted limits for rescue workers to operate because it affects them mentally and physically. Fully autonomous robots might adapt and alter their behaviour based on previous experience. The advent of full autonomy might call for robot rights. So the question is, should robots have rights, and if so, what type of rights?
4.2. Society-Robot Relationship in SAR Response Phase
- Nostalgia and conservatism:People throughout the world hold diverse societal beliefs and ideologies towards the use of technology. In some regions, people are enthusiastic about embracing new technologies like robots. For instance, some people enjoy using services like food cooked by robots, although this may not be the case for other people. In future, robot behaviour can be regarded as a humanlike entity with increased cognitive capabilities [94]. Likewise, the possibility that a particular society also accepts SAR robots in times of disaster is debatable.
- Trust:For society to embrace technology, it must be trusted; even for the human rescue team, complex SAR missions are challenging. Therefore, will society have enough trust in robotic rescuers?
- Expectation:Considering that technology has advanced to the point where robots can be used in SAR and have gained societal acceptance, then there will be a problem with people’s expectations of the robot [94]. Robots might have a limited range of capabilities for certain rescue operations, and their decisions may sometimes conflict. It matters what level of expectation the victims can place on robots.
4.3. Human-Robot Interaction
- Accountability:The degree of robot interaction required with the victim must be evaluated; robot-victim interaction can be fully autonomous or remotely operated. For instance, during the interaction victim may get hurt because of hardware failure even after taking the right interaction decision by the operator or robot. Who is responsible for such an incident? Is it the hardware developer, the operator or the robot (for not looking at the hardware capabilities/failures, who is responsible? It is challenging to hold any participant liable in this scenario for the robot’s irresponsible actions.
- Reliability and trust:Consider a scenario in which a robot is ready to assist a victim who is physically injured. A robot tries to help the victim by holding or moving out of the situation. During this situation, will the victim have enough belief that the robot interaction will be safe and will not harm? People might not have clue about the robot’s actions and its interactions, which may or may not ease the victim. Will a robot make the right choices consistently under different circumstances and act accordingly? This raises questions on reliability and trust in robot interactions.
- Care and safety consideration:SAR operations carried out by human rescuers typically include victim care and safety. Humans are capable of comprehending both the victim’s physical and emotional experiences. Will SAR robots perform with similar care and safety, and comprehend the victim’s situation as human rescuers do?
4.4. Data
- Data safety and security:The sensible data gathered from the catastrophe need to be secured in a safe location. In such a case, who will be in charge of maintaining data safety and security from unethical practices? How do officials ensure that the information obtained during SAR is stored securely and is impervious to hacking attempts from any other agencies?
- Accessibility:How to identify and whom to provide ownership of the SAR data, whether it be the robot, local government, or an organisation. Further, defining the method of using data is difficult. By addressing various ethical challenges, the government must create operational criteria for data management (how and for what purpose the data can be utilised in the future).
- Privacy:The kind of information the robot gathers is crucial. People need to be aware of the data collected and how it will be used in the future. Different data-related issues must be communicated to the designers and robot operators to protect victim privacy. Further, if data is collected; it must be appropriately organised to avoid having an impact on people.
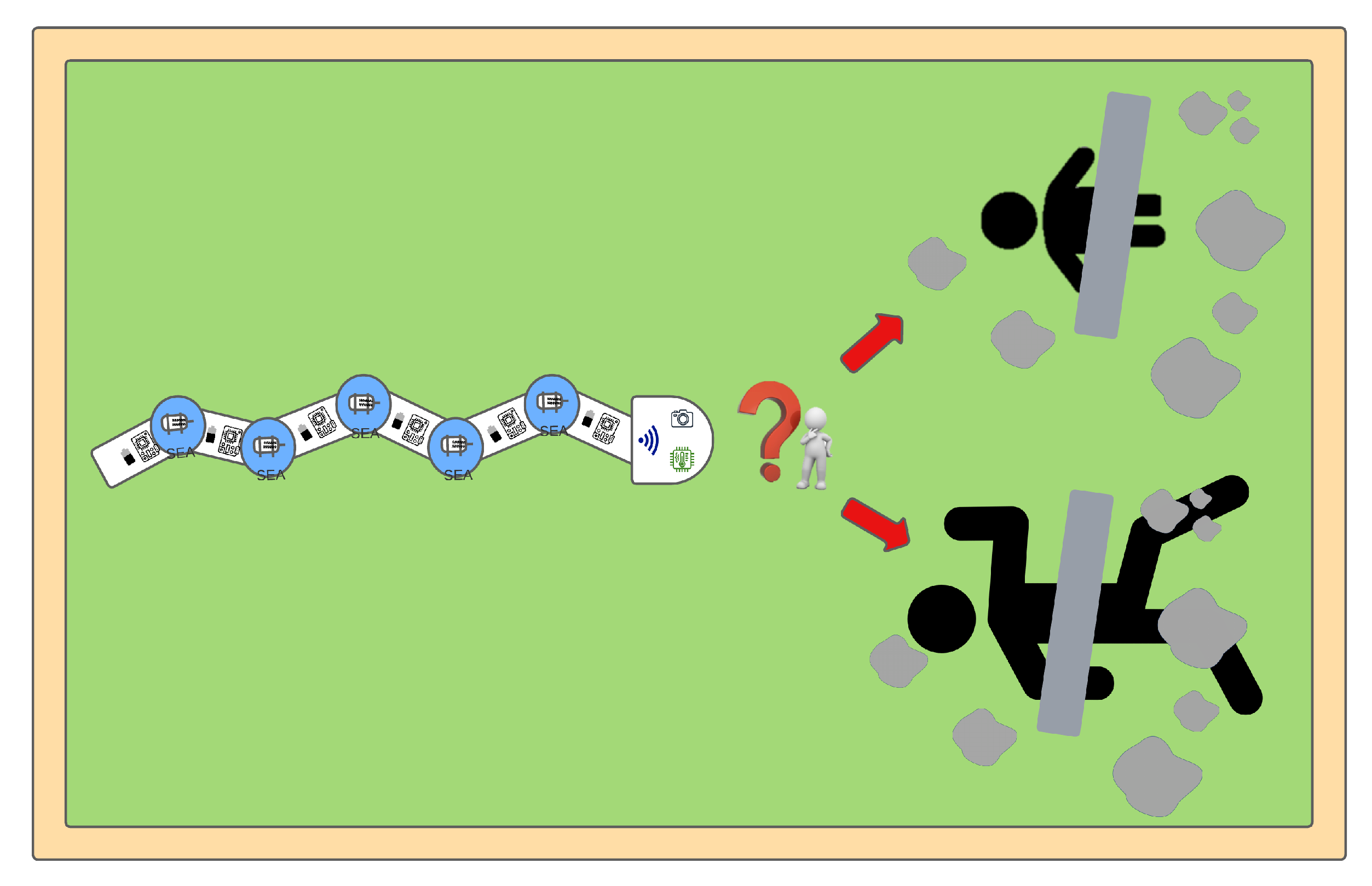
4.5. Ethical Dilemmas Identified in the SAR Response Phase with Snake Robots
- Should snake robots be deployed in the SAR response phase given their potential to save or endanger lives depending on the situation?
- What level of the snake’s autonomy is appropriate to use, and how does that impact SAR operations?
- Will the type and degree of human-robot interaction be important, and if yes, what kind and degree of interaction should be used in certain circumstances?
- Will an autonomous snake robot receive the same treatment as a human rescuer?
- Who will be held accountable if the snake robot behaves irresponsibly or malfunctions when interacting with the victim?
- When given rights, what kind of rights should the snake robot have?
- Will the snake robot be accepted by society for use in SAR response phase operations?
- Is it possible to put adequate trust in snake robot operations?
- Will society have higher expectations than what a snake robot is capable of?
- How to handle the victim’s sentiments and emotions as they are being managed by the snake robot?
- Will snake robot behaviour be reliable and able to gain victims’ trust?
- Will snake robots carry out various tasks safely and with care?
- Will the information gathered by the snake robot during the operation be stored securely?
- Who has access to the data and how may it be utilised later?
- Will data collection adhere to privacy laws?
5. Snake Robot Design Considerations for SAR Response Phase
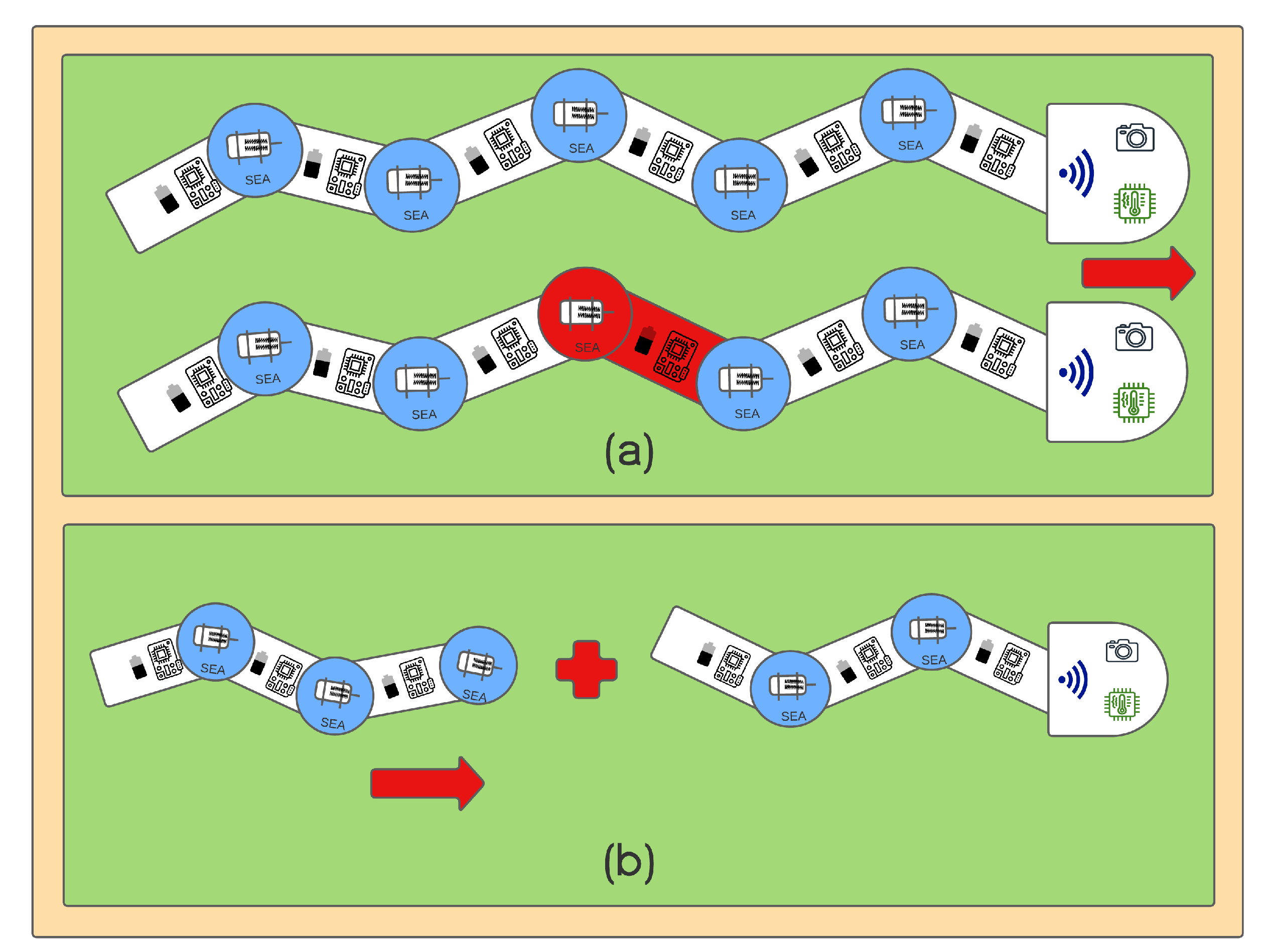
5.1. Mechanical/Hardware Design
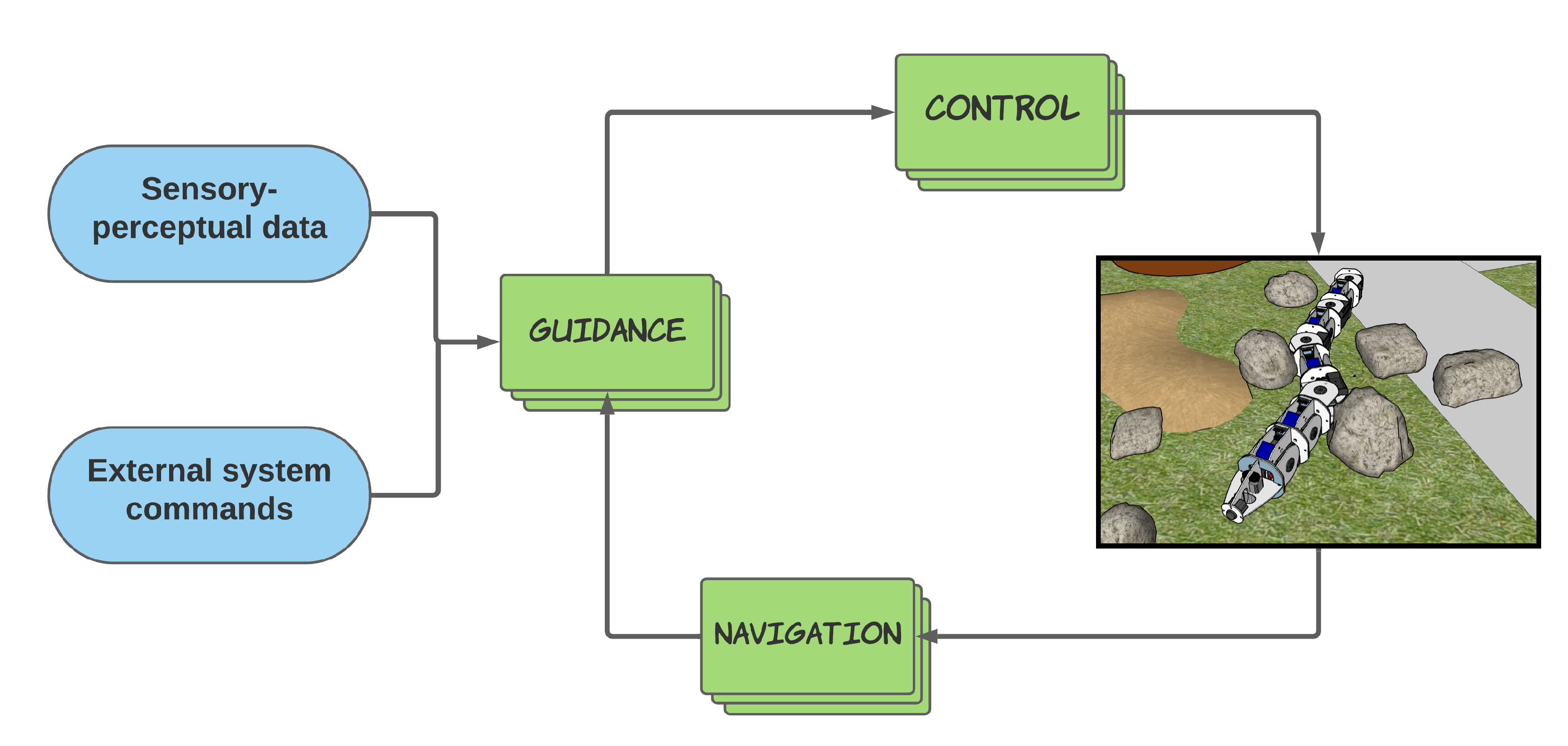
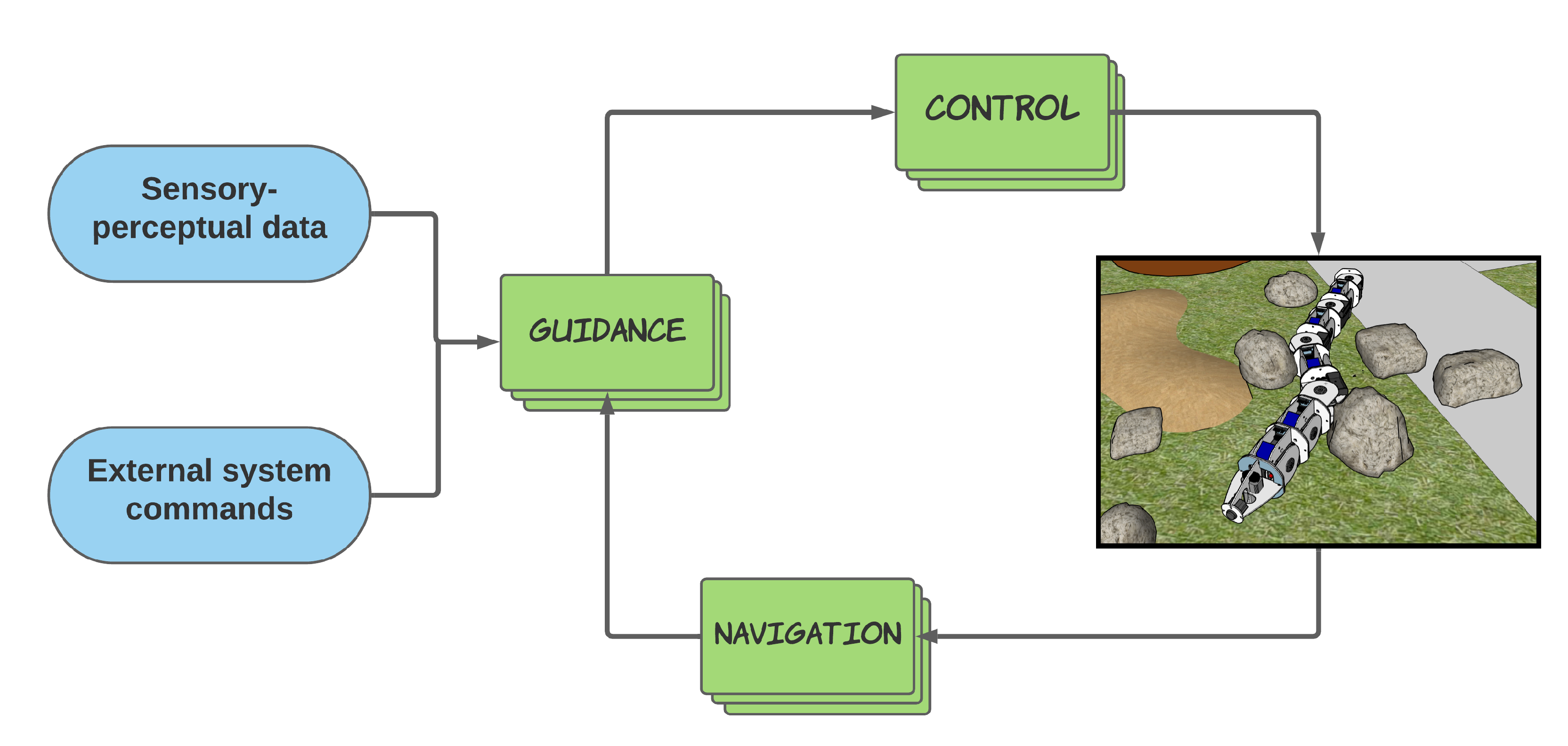
5.2. Control Design
5.3. Software Design
6. Remarks and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| SAR | Search and Rescue |
| UN OCHA | United Nations Office for the coordination of Humanitarian Affairs |
| CAGR | Compound annual growth rate |
| UGV | Unmanned Ground Vehicle |
| UAV | Unmanned Aerial Vehicle |
| WHO | World Health Organisation |
| CBR | case-based reasoning |
| ANN | Artificial neural networks |
| VSD | Value sensitive design |
| ROS | Robot Operating System |
| GNC | Guidance, Navigation and Control |
| ATRA | Autonomy and technology readiness assessment |
| CCVSD | Care-Centered Value Sensitive Design |
| ODE | Open Dynamic Engine |
| INSARAG | International Search and Rescue Advisory Group |
| ICARUS | Integrated Climate forcing and Air pollution Reduction in Urban Systems |
| UCD | User-Centered Design |
| AUV | Autonomous Underwater Vehicle |
| ROV | Remotely Operated Vehicle |
| UHV | Unmanned Hybrid Vehicle |
| UApV | Unmanned amphibious Vehicle |
| CRASAR | Center for Robot-Assisted Search and Rescue |
| ACR | Active Cord Mechanism |
| HRI | Human-Robot Interaction |
References
- Zibulewsky, J. Defining disaster: The emergency department perspective. In Baylor University Medical Center; Taylor & Francis: New York, NY, USA, 2001; Volume 14, pp. 144–149. [Google Scholar]
- INSARAG Guidelines, Volume II Preparedness and Response, Manual A Capacity Building (2020). Available online: https://reliefweb.int/report/world/insarag-guidelines-volume-ii-preparedness-and-response-manual-capacity-building-2020 (accessed on 2 November 2022).
- Bravo, R.; Leiras, A. Literature review of the application of UAVs in humanitarian relief. In Proceedings of the XXXV Encontro Nacional de Engenharia de Producao, Fortaleza, CE, Brasil, 13–16 October 2015; pp. 13–16. [Google Scholar]
- De Cubber, G.; Serrano, D.; Berns, K.; Chintamani, K.; Sabino, R.; Ourevitch, S.; Doroftei, D.; Armbrust, C.; Flamma, T.; Baudoin, Y. Search and rescue robots developed by the European icarus project. In Proceedings of the 7th International Workshop on Robotics for Risky Environments, Saint-Petersburg, Russia, 1–3 October 2013. [Google Scholar]
- Whitman, J.; Zevallos, N.; Travers, M.; Choset, H. Snake robot urban search after the 2017 Mexico City earthquake. In Proceedings of the 2018 IEEE International Symposium on Safety, Security, and Rescue robotics (SSRR), Philadelphia, PA, USA, 6–8 August 2018; pp. 1–6. [Google Scholar]
- Couceiro, M.S. An overview of swarm robotics for Search and Rescue applications. In Artificial Intelligence: Concepts, Methodologies, Tools, and Applications; IGI Global: Pennsylvania, PA, USA, 2017. [Google Scholar]
- Ochoa, S.F.; Santos, R. Human-centric wireless sensor networks to improve information availability during urban Search and Rescue activities. Inf. Fusion 2015, 22, 71–84. [Google Scholar] [CrossRef]
- Schneider, F.E.; Wildermuth, D.; Wolf, H.L. ELROB and EURATHLON: Improving search & rescue robotics through real-world robot competitions. In Proceedings of the 2015 10th International Workshop on Robot Motion and Control (RoMoCo), Poznan, Poland, 6–8 July 2015; pp. 118–123. [Google Scholar]
- Murphy, R.R.; Tadokoro, S.; Nardi, D.; Jacoff, A.; Fiorini, P.; Choset, H.; Erkmen, A.M. Search and Rescue Robotics. In Springer Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1151–1173. [Google Scholar]
- Kawatsuma, S.; Fukushima, M.; Okada, T. Emergency response by robots to Fukushima-Daiichi accident: Summary and lessons learned. Ind. Robot. 2012, 39, 428–435. [Google Scholar] [CrossRef]
- Cubber, G.D.; Doroftei, D.; Rudin, K.; Berns, K.; Serrano, D.; Sanchez, J.; Govindaraj, S.; Bedkowski, J.; Roda, R. Search and Rescue Robotics-from Theory to Practice; IntechOpen: London, UK, 2017. [Google Scholar]
- Carlsen, H.; Johansson, L.; Wikman-Svahn, P.; Dreborg, K.H. Co-evolutionary scenarios for creative prototyping of future robot systems for civil protection. Technol. Forecast. Soc. Chang. 2014, 84, 93–100. [Google Scholar] [CrossRef]
- Harbers, M.; Greeff, J.D.; Kruijff-Korbayová, I.; Neerincx, M.A.; Hindriks, K.V. Exploring the ethical landscape of robot-assisted Search and Rescue. In A World with Robots; Springer: Cham, Switzerland, 2017; pp. 93–107. [Google Scholar]
- Cova, T.J. GIS in emergency management. Geogr. Inf. Syst. 1999, 2, 845–858. [Google Scholar]
- 2021 Disasters in Numbers. Available online: https://www.cred.be/publications (accessed on 10 November 2022).
- Search and Rescue Robots Market- Growth, Trends, COVID-19 Impact, and Forecasts (2022–2027). Available online: https://www.mordorintelligence.com/industry-reports/search-and-rescue-robots-market (accessed on 10 November 2022).
- Sharkey, N. The ethical frontiers of robotics. Science 2008, 322, 1800–1801. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ethics in Epidemics, Emergencies and Disasters: Research, Surveillance and Patient Care. Available online: https://www.who.int/publications/i/item/9789241549349 (accessed on 11 November 2022).
- Civaner, M.M.; Vatansever, K.; Pala, K. Ethical problems in an era where disasters have become a part of daily life: A qualitative study of healthcare workers in Turkey. PLoS ONE 2017, 12, e0174162. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Battistuzzi, L.; Recchiuto, C.T.; Sgorbissa, A. Ethical concerns in rescue robotics: A scoping review. Ethics Inf. Technol. 2021, 23, 863–875. [Google Scholar] [CrossRef]
- Belk, R. Ethical issues in service robotics and artificial intelligence. Serv. Ind. J. 2021, 41, 860–876. [Google Scholar] [CrossRef] [Green Version]
- Nagenborg, M.; Capurro, R.; Weber, J.; Pingel, C. Ethical regulations on robotics in Europe. In Machine Ethics and Robot Ethics; Routledge: Oxfordshire, UK, 2008; pp. 473–490. [Google Scholar]
- Heaven, D. Robot laws. New Sci. 2018, 239, 38–41. [Google Scholar] [CrossRef]
- Nof, S. Handbook of Robotics, 56th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1999. [Google Scholar]
- Asimov’s Laws: Do They Work in Modern Robotics? Available online: https://kassailaw.com/ai/asimovs-laws-do-they-work-in-modern-robotics/ (accessed on 10 January 2023).
- Asimov’s Laws of Robotics: Implications for Information Technology. Available online: http://www.rogerclarke.com/SOS/Asimov.html (accessed on 10 January 2023).
- Nevejans, N. European Civil Law Rules in Robotics; European Union: Brussel, Belgium, 2016. [Google Scholar]
- Leenes, R.; Lucivero, F. Laws on robots, laws by robots, laws in robots: Regulating robot behaviour by design. Law Innov. Technol. 2014, 6, 193–220. [Google Scholar] [CrossRef]
- Making My Point for Me: Beyond Asimov. Available online: https://crasar.org/tag/ethics/ (accessed on 10 January 2023).
- Łichocki, P.; Billard, A.; Kahn, P.H. The ethical landscape of robotics. IEEE Robot. Autom. Mag. 2011, 18, 39–50. [Google Scholar] [CrossRef] [Green Version]
- Haselager, W.F. Robotics, philosophy and the problems of autonomy. Pragmat. Cogn. 2005, 13, 515–532. [Google Scholar] [CrossRef]
- Maner, W. Heuristic methods for computer ethics. Metaphilosophy 2002, 33, 339–365. [Google Scholar] [CrossRef]
- Marino, D.; Tamburrini, G. Learning robots and human responsibility. In Machine Ethics and Robot Ethics; Routledge: Oxfordshire, UK, 2020; pp. 377–382. [Google Scholar]
- Moor, J.H. The nature, importance, and difficulty of machine ethics. IEEE Intell. Syst. 2006, 21, 18–21. [Google Scholar] [CrossRef]
- Pal, S.K.; Shiu, S.C. Foundations of Soft Case-Based Reasoning; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Honarvar, A.R.; Ghasem-Aghaee, N. An artificial neural network approach for creating an ethical artificial agent. In Proceedings of the 2009 IEEE International Symposium on Computational Intelligence in Robotics and Automation-(CIRA), Daejeon, Republic of Korea, 15–18 December 2009; pp. 290–295. [Google Scholar]
- McLaren, B.M. Computational models of ethical reasoning: Challenges, initial steps, and future directions. IEEE Intell. Syst. 2006, 21, 29–37. [Google Scholar] [CrossRef] [Green Version]
- Doroftei, D.; Matos, A.; de Cubber, G. Designing Search and Rescue robots towards realistic user requirements. In Applied Mechanics And Materials; Trans Tech Publications Ltd.: Stafa-Zurich, Switzerland, 2014; Volume 658, pp. 612–617. [Google Scholar]
- Doroftei, D.; De Cubber, G.; Wagemans, R.; Matos, A.; Silva, E.; Lobo, V.; Cardoso, G.; Chintamani, K.; Govindaraj, S.; Gancet, J.; et al. User-centered design. In Search and Rescue Robotics. From Theory to Practice; IntechOpen: London, UK, 2017; pp. 19–36. [Google Scholar]
- Wasilow, S.; Thorpe, J.B. Artificial intelligence, robotics, ethics, and the military: A Canadian perspective. AI Mag. 2019, 40, 37–48. [Google Scholar] [CrossRef]
- Wang, N. “We Live on Hope…”: Ethical Considerations of Humanitarian Use of Drones in Post-Disaster Nepal. IEEE Technol. Soc. Mag. 2020, 39, 76–85. [Google Scholar] [CrossRef]
- Van Wynsberghe, A. A method for integrating ethics into the design of robots. Ind. Robot. 2013, 40, 433–440. [Google Scholar] [CrossRef]
- National Search and Rescue Manual. Available online: https://www.amsa.gov.au/national-search-and-rescue-council/manuals-and-publications/national-search-and-rescue-manual (accessed on 10 January 2023).
- Leenes, R.; Palmerini, E.; Koops, B.J.; Bertolini, A.; Salvini, P.; Lucivero, F. Regulatory challenges of robotics: Some guidelines for addressing legal and ethical issues. Law Innov. Technol. 2017, 9, 1–44. [Google Scholar] [CrossRef] [Green Version]
- Brodeur, T.; Regis, P.; Feil-Seifer, D.; Sengupta, S. Search and Rescue operations with mesh networked robots. In Proceedings of the 2018 9th IEEE Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), New York, NY, USA, 8–10 November 2018; pp. 6–12. [Google Scholar]
- Matsuno, F.; Tadokoro, S. Rescue robots and systems in Japan. In Proceedings of the 2004 IEEE International Conference on Robotics and Biomimetics, Shenyang, China, 22–26 August 2004; pp. 12–20. [Google Scholar] [CrossRef]
- Schofield, R.T. Potential Fields Navigation of Lifeguard Assistant Robot for Mass Marine Casualty Response. Ph.D. Thesis, Texas A&M University, Austin, TX, USA, 2018. [Google Scholar]
- Chandrasekaran, B.; Conrad, J.M. Human-robot collaboration: A survey. In Proceedings of the SoutheastCon 2015, Fort Lauderdale, FL, USA, 9–12 April 2015; pp. 1–8. [Google Scholar]
- Lahr, D.F. Design and Control of a Humanoid Robot, SAFFiR. Ph.D. Thesis, Virginia Tech, Blacksburg, VA, USA, 2014. [Google Scholar]
- Bogue, R. The role of robots in firefighting. Ind. Robot Int. J. Robot. Res. Appl. 2021, 48, 174–178. [Google Scholar] [CrossRef]
- Hutter, M.; Gehring, C.; Jud, D.; Lauber, A.; Bellicoso, C.D.; Tsounis, V.; Hwangbo, J.; Bodie, K.; Fankhauser, P.; Bloesch, M.; et al. Anymal-a highly mobile and dynamic quadrupedal robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2016; pp. 38–44. [Google Scholar]
- Klamt, T.; Schwarz, M.; Lenz, C.; Baccelliere, L.; Buongiorno, D.; Cichon, T.; DiGuardo, A.; Droeschel, D.; Gabardi, M.; Kamedula, M.; et al. Remote mobile manipulation with the centauro robot: Full-body telepresence and autonomous operator assistance. J. Field Robot. 2020, 37, 889–919. [Google Scholar] [CrossRef] [Green Version]
- Carlson, J.; Murphy, R.R. How UGVs physically fail in the field. IEEE Trans. Robot. 2005, 21, 423–437. [Google Scholar] [CrossRef]
- Kakogawa, A.; Ma, S. An in-pipe inspection module with an omnidirectional bent-pipe self-adaptation mechanism using a joint torque control. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 4347–4352. [Google Scholar]
- Hall, A.K.; Backonja, U.; Painter, I.; Cakmak, M.; Sung, M.; Lau, T.; Thompson, H.J.; Demiris, G. Acceptance and perceived usefulness of robots to assist with activities of daily living and healthcare tasks. Assist. Technol. 2017, 31, 133–140. [Google Scholar] [CrossRef] [PubMed]
- Charalambous, G.; Fletcher, S.R. Trust in Industrial Human–Robot Collaboration. In The 21st Century Industrial Robot: When Tools Become Collaborators; Springer: Cham, Switzerland, 2022; pp. 87–103. [Google Scholar]
- Boada, J.P.; Maestre, B.R.; Genís, C.T. The ethical issues of social assistive robotics: A critical literature review. Technol. Soc. 2021, 67, 101726. [Google Scholar] [CrossRef]
- Lindholm, V. Unmanned Ground Vehicles in Urban Military Operations: A Case Study Exploring What the Potential End Users Want. Master’s Thesis, Linköping University, Linköping, Sweden, 2022. [Google Scholar]
- Moor, J. Four kinds of ethical robots. Philos. Now 2009, 72, 12–14. [Google Scholar]
- Lindsay, B.R.; Kapp, L.; Shields, D.A.; Stubbs, M.; Lister, S.A.; McCarty, M.; Kirk, R.S.; Bearden, D.M.; Bracmort, K.; Cowan, T. Federal emergency management: A brief introduction; Library of Congress: Washington, DC, USA, 2012. [Google Scholar]
- Hannaford, B.; Okamura, A.M. Haptics. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2016; pp. 1063–1084. [Google Scholar]
- Erkmen, I.; Erkmen, A.M.; Matsuno, F.; Chatterjee, R.; Kamegawa, T. Snake robots to the rescue! Ieee Robot. Autom. Mag. 2002, 9, 17–25. [Google Scholar] [CrossRef]
- Liljeback, P.; Pettersen, K.Y.; Stavdahl, Ø.; Gravdahl, J.T. Experimental investigation of obstacle-aided locomotion with a snake robot. IEEE Trans. Robot. 2011, 27, 792–800. [Google Scholar] [CrossRef] [Green Version]
- Sanfilippo, F.; Azpiazu, J.; Marafioti, G.; Transeth, A.A.; Stavdahl, Ø.; Liljebäck, P. A review on perception-driven obstacle-aided locomotion for snake robots. In Proceedings of the 2016 14th International Conference on Control, Automation, Robotics and Vision (ICARCV), Phuket, Thailand, 13–15 November 2016; pp. 1–7. [Google Scholar]
- Sanfilippo, F.; Azpiazu, J.; Marafioti, G.; Transeth, A.A.; Stavdahl, Ø.; Liljebäck, P. Perception-driven obstacle-aided locomotion for snake robots: The state of the art, challenges and possibilities. Appl. Sci. 2017, 7, 336. [Google Scholar] [CrossRef] [Green Version]
- Ponte, H.; Queenan, M.; Gong, C.; Mertz, C.; Travers, M.; Enner, F.; Hebert, M.; Choset, H. Visual sensing for developing autonomous behavior in snake robots. In Proceedings of the International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 2779–2784. [Google Scholar]
- Wright, C.; Buchan, A.; Brown, B.; Geist, J.; Schwerin, M.; Rollinson, D.; Tesch, M.; Choset, H. Design and architecture of the unified modular snake robot. In Proceedings of the International Conference on Robotics and Automation, St. Paul, MN, USA, 14–18 May 2012; pp. 4347–4354. [Google Scholar]
- Melo, K.; Paez, L.; Parra, C. Indoor and outdoor parametrized gait execution with modular snake robots. In Proceedings of the International Conference on Robotics and Automation, St. Paul, MN, USA, 14–18 May 2012; pp. 3525–3526. [Google Scholar]
- Sanfilippo, F. Combining Grasping with Adaptive Path Following and Locomotion for Modular Snake Robots. Int. J. Mech. Eng. Robot. Res. 2022, 11, 59–65. [Google Scholar] [CrossRef]
- Liljebäck, P.; Pettersen, K.Y.; Stavdahl, Ø.; Gravdahl, J.T. A review on modelling, implementation, and control of snake robots. Robot. Auton. Syst. 2012, 60, 29–40. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Gasoto, R.; Jiang, Z.; Onal, C.; Fu, J. Learning to locomote with artificial neural-network and cpg-based control in a soft snake robot. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 7758–7765. [Google Scholar]
- Kanda, T.; Glas, D.F.; Shiomi, M.; Ishiguro, H.; Hagita, N. Who will be the customer? A social robot that anticipates people’s behavior from their trajectories. In Proceedings of the 10th International Conference on Ubiquitous Computing, Seoul, Republic of Korea, 21–24 September 2008; pp. 380–389. [Google Scholar]
- Satake, S.; Kanda, T.; Glas, D.F.; Imai, M.; Ishiguro, H.; Hagita, N. How to approach humans? Strategies for social robots to initiate interaction. In Proceedings of the 4th ACM/IEEE international conference on Human robot interaction, La Jolla, CA, USA, 11–13 March 2009; pp. 109–116. [Google Scholar]
- Sirithunge, C.; Jayasekara, A.B.P.; Chandima, D. Proactive robots with the perception of nonverbal human behavior: A review. IEEE Access 2019, 7, 77308–77327. [Google Scholar] [CrossRef]
- Destephe, M.; Brandao, M.; Kishi, T.; Zecca, M.; Hashimoto, K.; Takanishi, A. Emotional gait: Effects on humans’ perception of humanoid robots. In Proceedings of the 23rd IEEE international symposium on robot and human interactive communication, Edinburgh Gate, UK, 25–29 August 2014; pp. 261–266. [Google Scholar]
- Rádlová, S.; Janovcová, M.; Sedláčková, K.; Polák, J.; Nácar, D.; Peléšková, Š.; Frynta, D.; Landová, E. Snakes represent emotionally salient stimuli that may evoke both fear and disgust. Front. Psychol. 2019, 10, 1085. [Google Scholar] [CrossRef] [Green Version]
- Casper, J.; Murphy, R.R. Human-robot interactions during the robot-assisted urban search and rescue response at the world trade center. IEEE Trans. Syst. Man Cybern. Part B 2003, 33, 367–385. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Murphy, R.R. Trial by fire [rescue robots]. IEEE Robot. Autom. Mag. 2004, 11, 50–61. [Google Scholar] [CrossRef]
- Murphy, R.R. Human-robot interaction in rescue robotics. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev) 2004, 34, 138–153. [Google Scholar] [CrossRef]
- Birk, A.; Schwertfeger, S.; Pathak, K. A networking framework for teleoperation in safety, security, and rescue robotics. IEee Wirel. Commun. 2009, 16, 6–13. [Google Scholar] [CrossRef]
- Murphy, R.R.; Kravitz, J.; Stover, S.L.; Shoureshi, R. Mobile robots in mine rescue and recovery. IEEE Robot. Autom. Mag. 2009, 16, 91–103. [Google Scholar] [CrossRef]
- Liljebäck, P.; Pettersen, K.Y.; Stavdahl, Ø.; Gravdahl, J.T. Snake Robots: Modelling, Mechatronics, and Control; Springer: London, UK, 2013. [Google Scholar] [CrossRef] [Green Version]
- Liu, B.; Liu, M.; Liu, X.; Tuo, X.; Wang, X.; Zhao, S.; Xiao, T. Design and realize a snake-like robot in complex environment. J. Robot. 2019, 2019, 1523493. [Google Scholar] [CrossRef]
- Yamada, H.; Hirose, S. Development of practical 3-dimensional active cord mechanism ACM-R4. J. Robot. Mechatron. 2006, 18, 305–311. [Google Scholar] [CrossRef]
- Huang, C.W.; Huang, C.H.; Hung, Y.H.; Chang, C.Y. Sensing pipes of a nuclear power mechanism using low-cost snake robot. Adv. Mech. Eng. 2018, 10. [Google Scholar] [CrossRef]
- Bogue, R. Snake robots: A review of research, products and applications. Industrial Robot 2014, 41, 253–258. [Google Scholar] [CrossRef]
- Duivon, A.; Kirsch, P.; Mauboussin, B.; Mougard, G.; Woszczyk, J.; Sanfilippo, F. The Redesigned Serpens, a Low-Cost, Highly Compliant Snake Robot. Robotics 2022, 11, 42. [Google Scholar] [CrossRef]
- Sanfilippo, F.; Helgerud, E.; Stadheim, P.A.; Aronsen, S.L. Serpens, a low-cost snake robot with series elastic torque-controlled actuators and a screw-less assembly mechanism. In Proceedings of the 5th International Conference on Control, Automation and Robotics (ICCAR), Beijing, China, 19–22 April 2019; pp. 133–139. [Google Scholar]
- Sanfilippo, F.; Hua, T.M.; Bos, S. A comparison between a two feedback control loop and a reinforcement learning algorithm for compliant low-cost series elastic actuators. In Proceedings of the 53rd Hawaii International Conference on System Sciences (HICSS 2020), Maui, HI, USA, 7–10 January 2020. [Google Scholar]
- Ariizumi, R.; Matsuno, F. Dynamic analysis of three snake robot gaits. IEEE Trans. Robot. 2017, 33, 1075–1087. [Google Scholar] [CrossRef]
- Kelasidi, E.; Kohl, A.M.; Pettersen, K.Y.; Hoffmann, B.; Gravdahl, J.T. Experimental investigation of locomotion efficiency and path-following for underwater snake robots with and without a caudal fin. Annu. Rev. Control 2018, 46, 281–294. [Google Scholar] [CrossRef]
- Matsuno, F.; Sato, H. Trajectory tracking control of snake robots based on dynamic model. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Ieee, Barcelona, Spain, 18–22 April 2005; pp. 3029–3034. [Google Scholar]
- Ma, S. Analysis of snake movement forms for realization of snake-like robots. In Proceedings of the 1999 IEEE International Conference on Robotics and Automation (Cat. No. 99CH36288C), Detroit, MI, USA, 10–15 May 1999; Volume 4, pp. 3007–3013. [Google Scholar]
- De Graaf, M. An ethical evaluation of human–robot relationships. Int. J. Soc. Robot. 2016, 8, 589–598. [Google Scholar] [CrossRef] [Green Version]
- CMU Biorobotics Lab Deployment Report: EVN Zwentendorf Nuclear Power Plant, Zwentendorf, Austria, May 2013. Available online: http://biorobotics.ri.cmu.edu/applications/images/SnakeRobotZwentendorfReport.pdf (accessed on 10 November 2022).
- Ansari, A.; Whitman, J.; Saund, B.; Choset, H. Modular platforms for advanced inspection, locomotion, and manipulation. In Proceedings of the 43rd Annual Waste Management Conference (WM2017), Phoenix, AZ, USA, 5–9 March 2017. [Google Scholar]
- Bae, J.; Kim, M.; Song, B.; Jin, M.; Yun, D. Snake robot with driving assistant mechanism. Appl. Sci. 2020, 10, 7478. [Google Scholar] [CrossRef]
- Pfotzer, L.; Klemm, S.; Roennau, A.; Zöllner, J.M.; Dillmann, R. Autonomous navigation for reconfigurable snake-like robots in challenging, unknown environments. Robot. Auton. Syst. 2017, 89, 123–135. [Google Scholar] [CrossRef]
- Mu, Z.; Wang, H.; Xu, W.; Liu, T.; Wang, H. Two types of snake-like robots for complex environment exploration: Design, development, and experiment. Adv. Mech. Eng. 2017, 9, 1687814017721854. [Google Scholar] [CrossRef] [Green Version]
- Wright, C.; Johnson, A.; Peck, A.; McCord, Z.; Naaktgeboren, A.; Gianfortoni, P.; Gonzalez-Rivero, M.; Hatton, R.; Choset, H. Design of a modular snake robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 2609–2614. [Google Scholar]
- Racioppo, P.; Ben-Tzvi, P. Design and control of a cable-driven articulated modular snake robot. IEEE/ASME Trans. Mechatron. 2019, 24, 893–901. [Google Scholar] [CrossRef] [Green Version]
- Koopaee, M.J.; Bal, S.; Pretty, C.; Chen, X. Design and development of a wheel-less snake robot with active stiffness control for adaptive pedal wave locomotion. J. Bionic Eng. 2019, 16, 593–607. [Google Scholar] [CrossRef]
- Luo, M.; Yan, R.; Wan, Z.; Qin, Y.; Santoso, J.; Skorina, E.H.; Onal, C.D. OriSnake: Design, fabrication, and experimental analysis of a 3-D origami snake robot. IEEE Robot. Autom. Lett. 2018, 3, 1993–1999. [Google Scholar] [CrossRef]
- Shahid, T.; Gouwanda, D.; Nurzaman, S.G.; Gopalai, A.A. Moving toward soft robotics: A decade review of the design of hand exoskeletons. Biomimetics 2018, 3, 17. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fu, S.; Wan, Y. Communicating in remote areas or disaster situations using unmanned aerial vehicles. HDIAC J. 2016, 2, 4–8. [Google Scholar]
- Rañó, I.; Eguíluz, A.G.; Sanfilippo, F. Bridging the gap between bio-inspired steering and locomotion: A braitenberg 3a snake robot. In Proceedings of the 15th International Conference on Control, Automation, Robotics and Vision (ICARCV), Singapore, 11–13 December 2018; pp. 1394–1399. [Google Scholar]
- Ferrarini, L.; Veber, C.; Lorentz, K. A case study for modelling and design of distributed automation systems. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2003), Kobe, Japan, 20–24 July 2003; Volume 2, pp. 1043–1048. [Google Scholar]
- Documentation–ROS Wiki. Available online: http://wiki.ros.org/ (accessed on 19 November 2022).
- Roldán, D.; Mahna, S.; Canas, J.M. A ROS-based open web platform for Intelligent Robotics education. In Robotics in Education; Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2022; Volume 1359. [Google Scholar]
- Bruyninckx, H. Open robot control software: The OROCOS project. In Proceedings of the IEEE International Conference on Robotics and Automation (Cat. No. 01CH37164), Seoul, Republic of Korea, 21–26 May 2001; Volume 3, pp. 2523–2528. [Google Scholar]
- Sanfilippo, F.; Stavdahl, Ø.; Liljebäck, P. SnakeSIM: A ROS-based control and simulation framework for perception-driven obstacle-aided locomotion of snake robots. Artif. Life Robot. 2018, 23, 449–458. [Google Scholar] [CrossRef]
- Gazebo. Available online: https://gazebosim.org/home (accessed on 19 November 2022).
- Pitonakova, L.; Giuliani, M.; Pipe, A.; Winfield, A. Feature and performance comparison of the V-REP, Gazebo and ARGoS robot simulators. In Proceedings of the Annual Conference Towards Autonomous Robotic Systems, Bristol, UK, 22 July 2018; Springer: Cham, Switzerland, 2018; pp. 357–368. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S. No. | Ethical Issues | Ethical Considerations | Brief Idea/Description |
|---|---|---|---|
| 1 | Autonomy | Operation level | How much autonomy each SAR operation is allowed to have? |
| Equality | Should we make a comparison between robots and living things in Search and Rescue situations? | ||
| Responsibility | Who is responsible for what during every level of robotic SAR operation? | ||
| Rights | What types of rights, if any, should robots have that people do? | ||
| 2 | Society-robot relationship | Nostalgia and conservatism | Will the public accept the robot for Search and Rescue? |
| Trust | In a SAR mission, will people trust the robot’s decision? | ||
| Expectation | Will robots behave as anticipated in SAR, or do people have irrational expectations? | ||
| 3 | Human-robot interaction | Accountability | Who bears responsibility for careless interactions with the victim during the response phase? |
| Reliability and trust | Will the robot consistently behave correctly during the interaction? Will users have trust in robot interactions? | ||
| Care and safety | Is the method and speed of interaction safe and affords the victim care? | ||
| 4 | Data | Data safety and security | Will the disaster-related data collected be secure and safe for future use? |
| Accessibility | Who is allowed to access the data? | ||
| Privacy | Is it permitted for the robot to collect private and sensitive information about the victim from SAR? |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chitikena, H.; Sanfilippo, F.; Ma, S. Robotics in Search and Rescue (SAR) Operations: An Ethical and Design Perspective Framework for Response Phase. Appl. Sci. 2023, 13, 1800. https://doi.org/10.3390/app13031800
Chitikena H, Sanfilippo F, Ma S. Robotics in Search and Rescue (SAR) Operations: An Ethical and Design Perspective Framework for Response Phase. Applied Sciences. 2023; 13(3):1800. https://doi.org/10.3390/app13031800
Chicago/Turabian StyleChitikena, Hareesh, Filippo Sanfilippo, and Shugen Ma. 2023. "Robotics in Search and Rescue (SAR) Operations: An Ethical and Design Perspective Framework for Response Phase" Applied Sciences 13, no. 3: 1800. https://doi.org/10.3390/app13031800
APA StyleChitikena, H., Sanfilippo, F., & Ma, S. (2023). Robotics in Search and Rescue (SAR) Operations: An Ethical and Design Perspective Framework for Response Phase. Applied Sciences, 13(3), 1800. https://doi.org/10.3390/app13031800