


A Time-Domain Planning Method for Surface Rescue Process of Amphibious Aircraft for Medium/Distant Maritime Rescue


Abstract
:1. Introduction
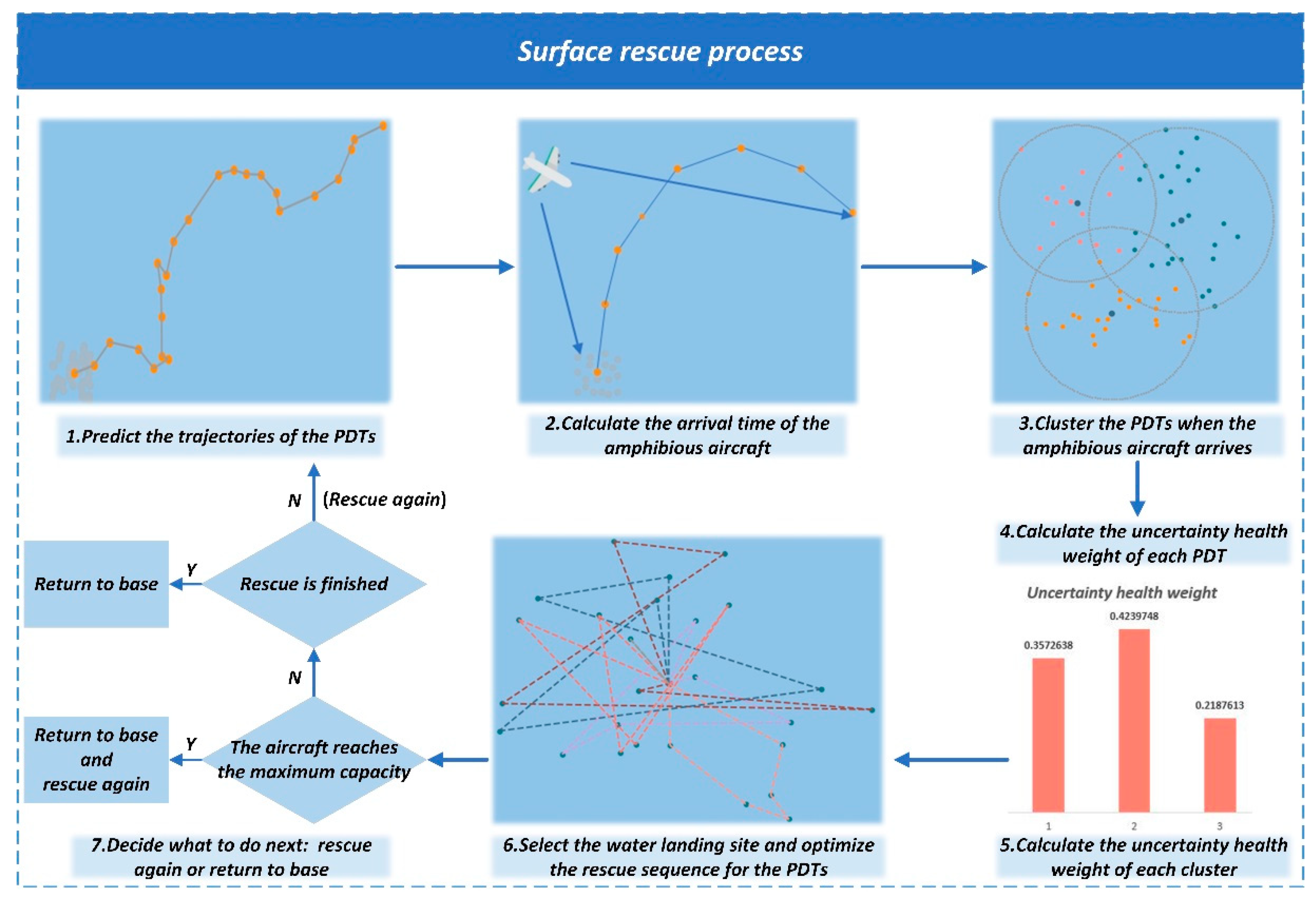
2. Rescue Process of TPM for SRP
2.1. Predicting the Trajectories of PDTs
2.2. Calculating the Time to Reach the Distress Position
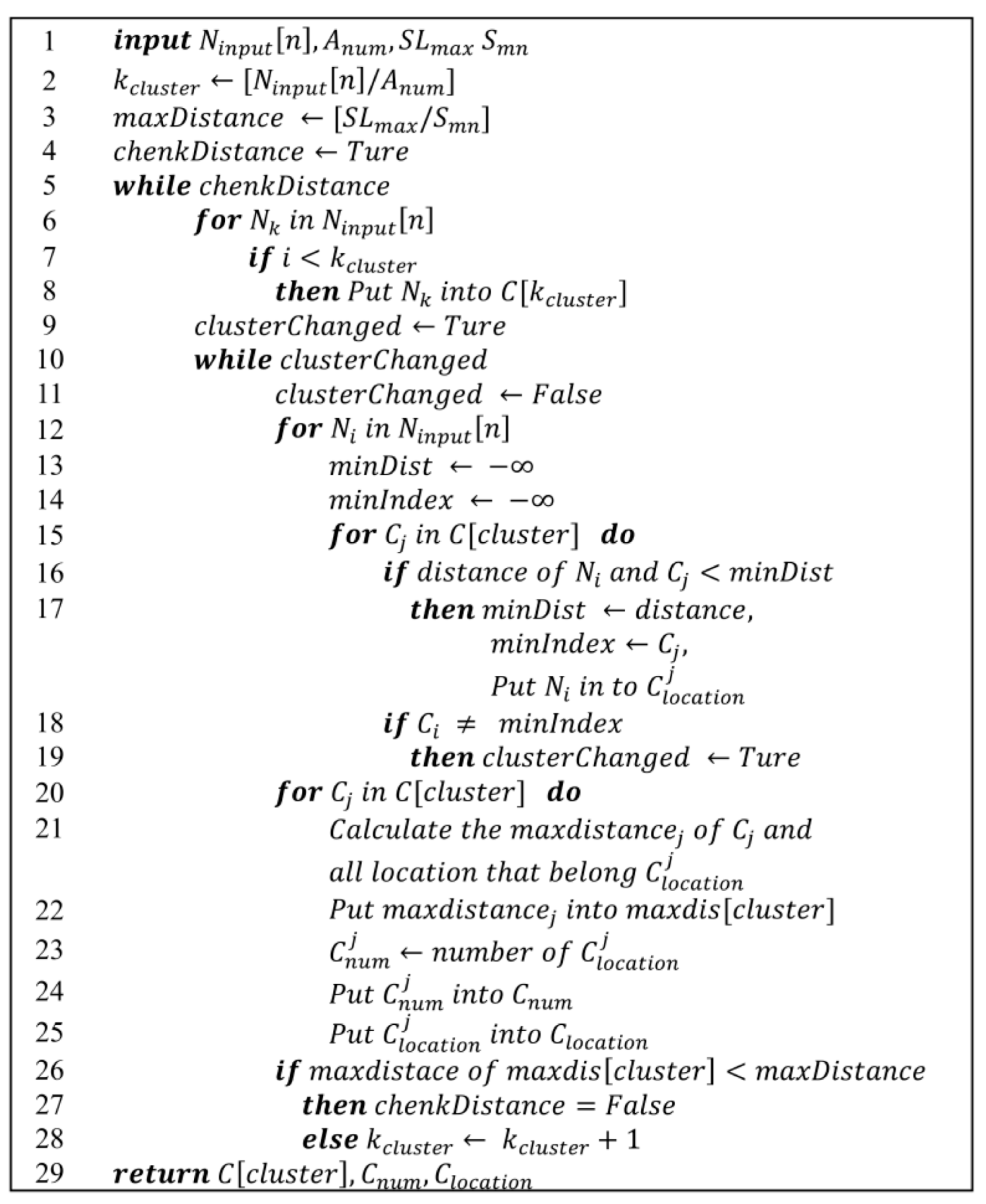
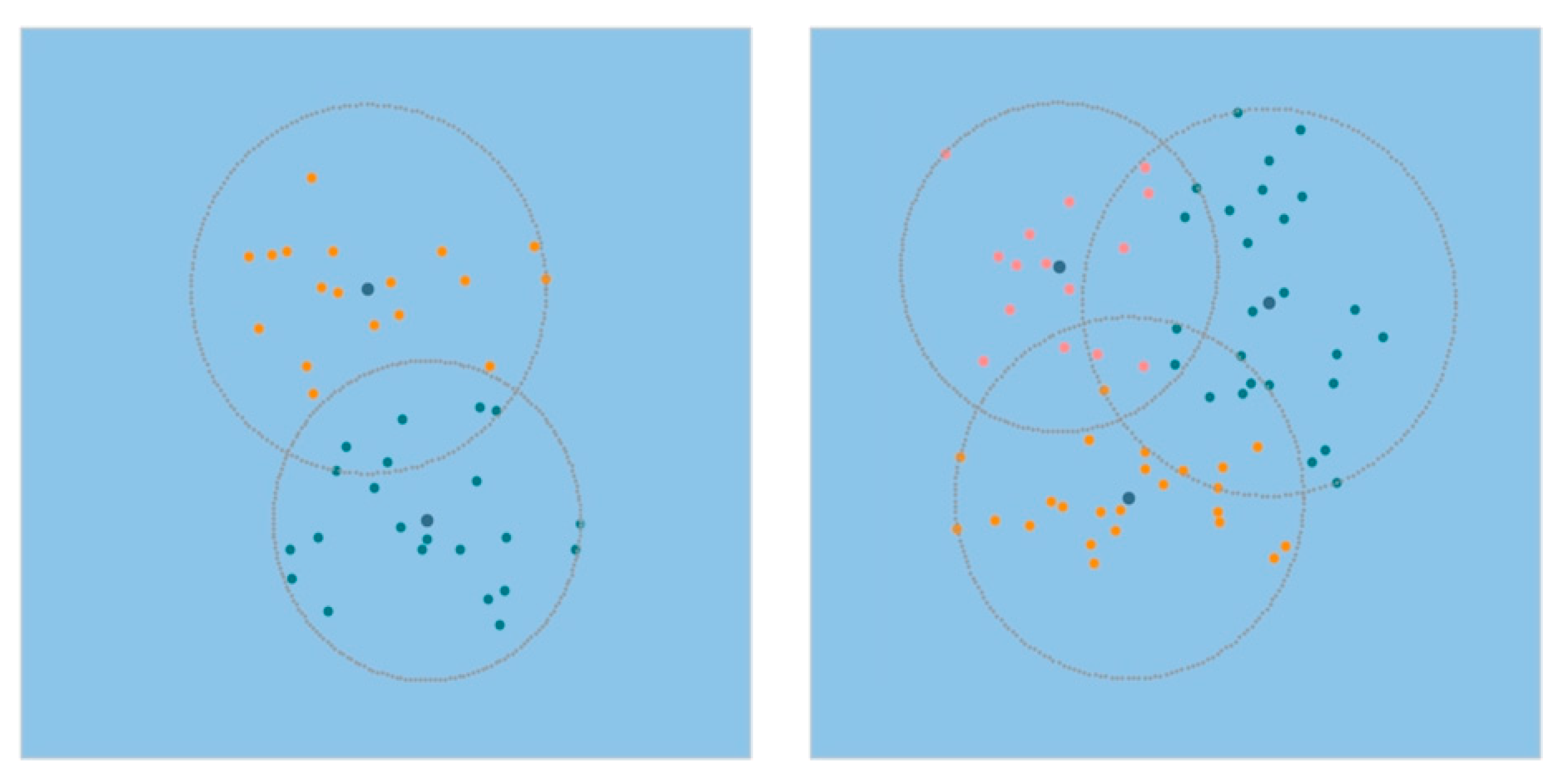
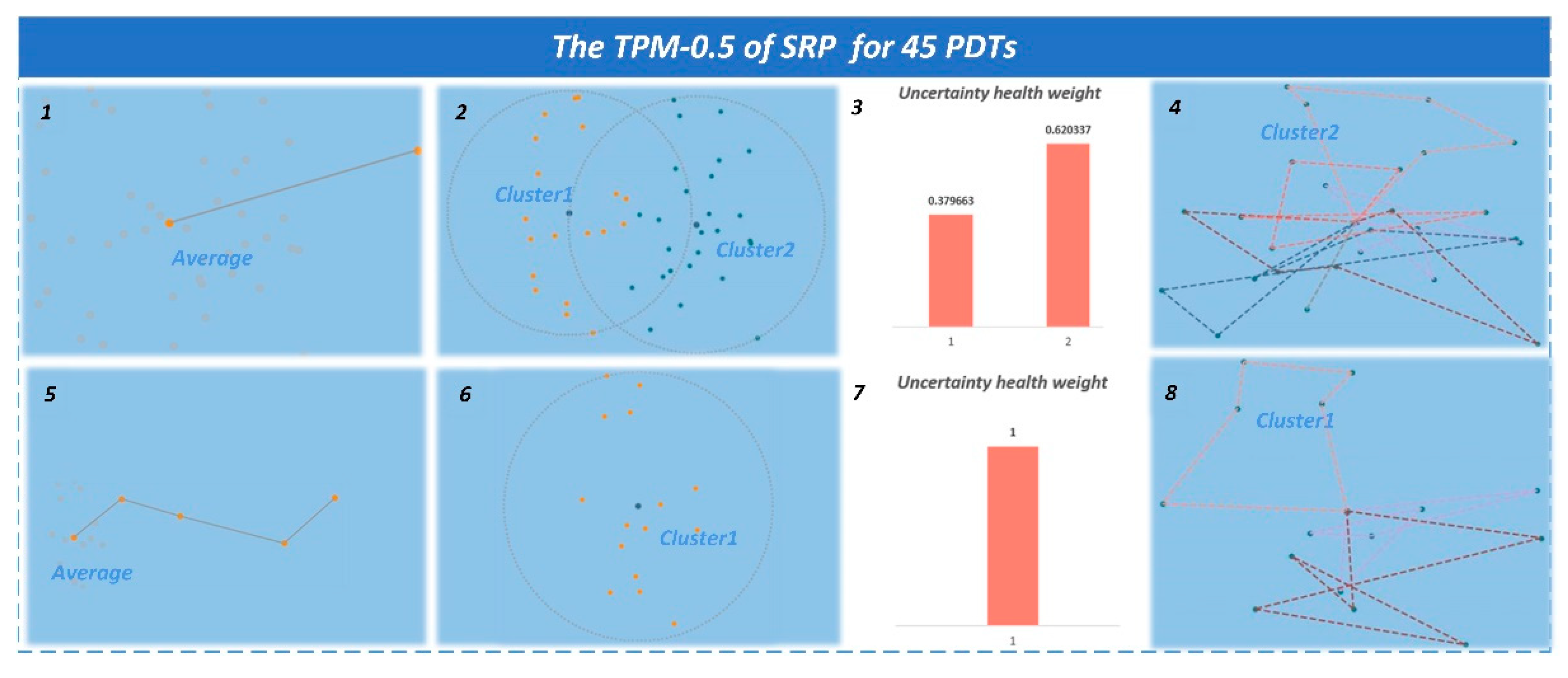
2.3. Dividing the PDTs into Multiple Clusters by K-Means*
2.4. Selecting the Water Landing Site Based on the Uncertainty Health Weight of PDTs
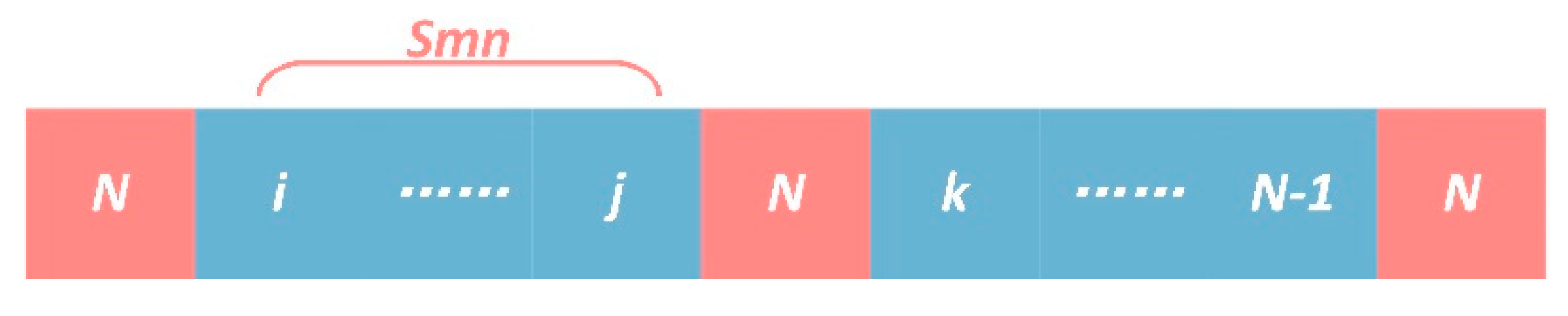
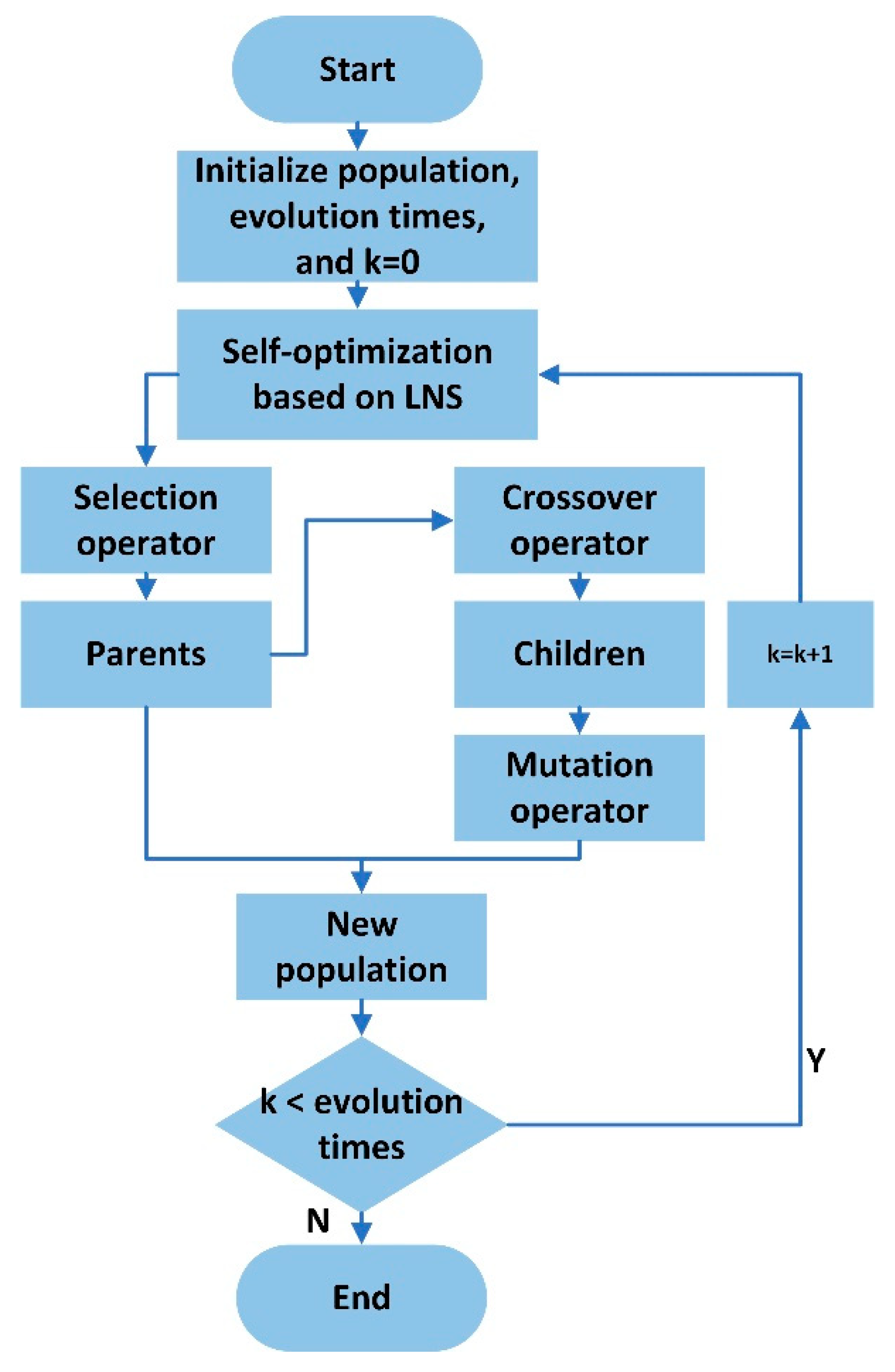
2.5. Optimizing the Rescue Sequence for the Selected Cluster by GA*
2.5.1. Population Definition
2.5.2. Individual Chromosome Coding
2.5.3. Optimization Objective
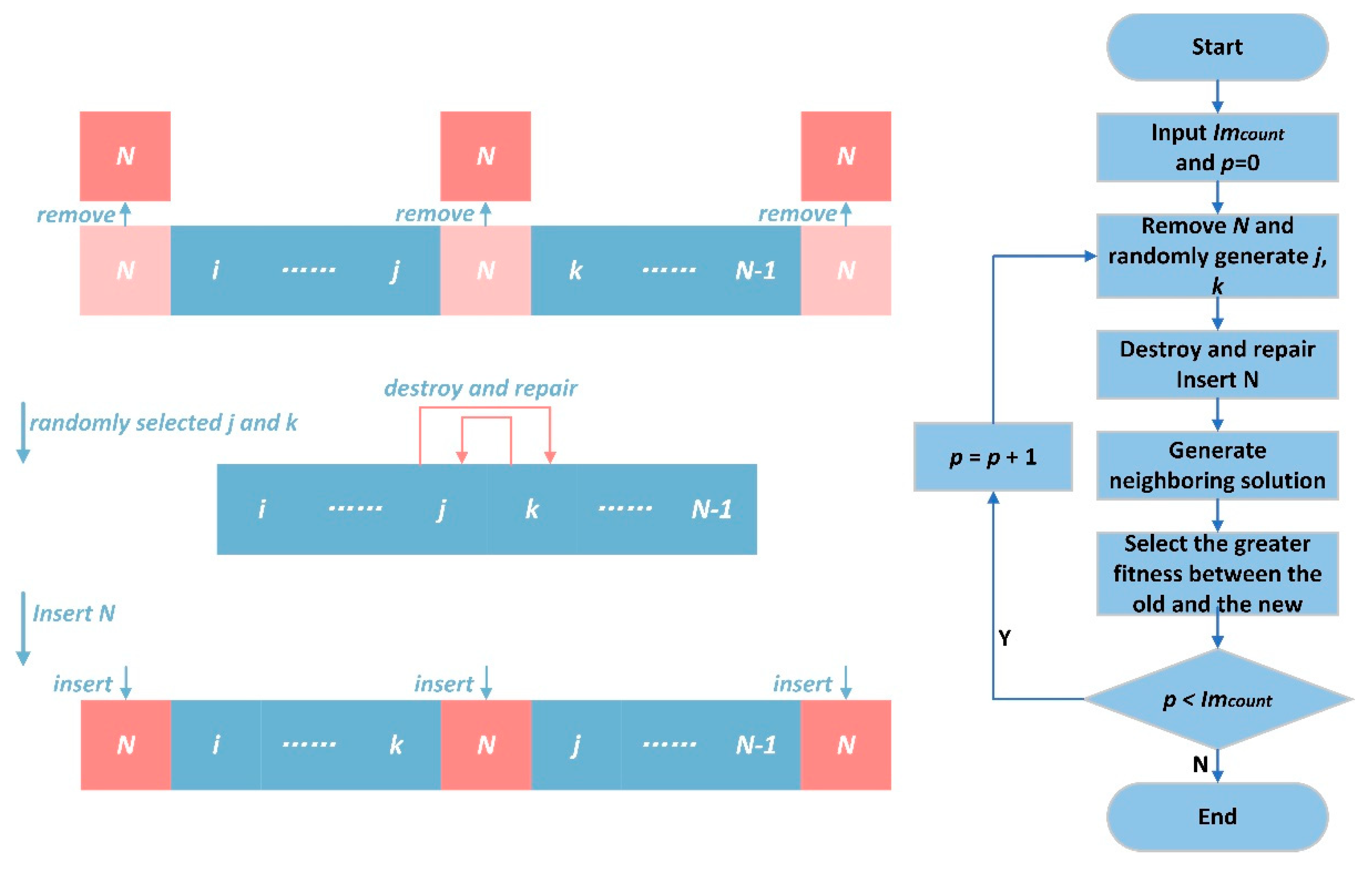
2.5.4. Self-Optimization Based on LNS
2.5.5. Selection Operator
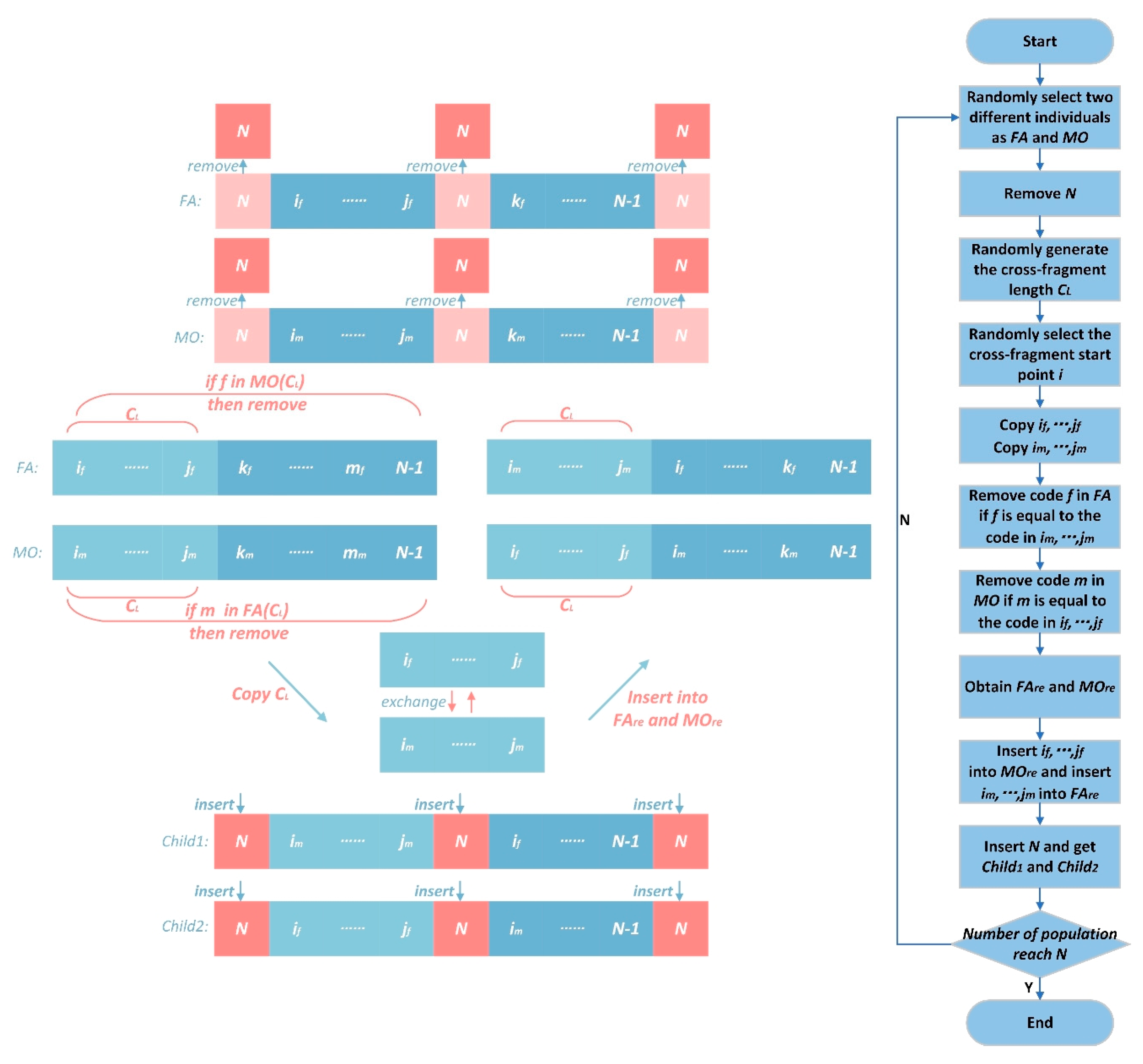
2.5.6. Crossover Operator
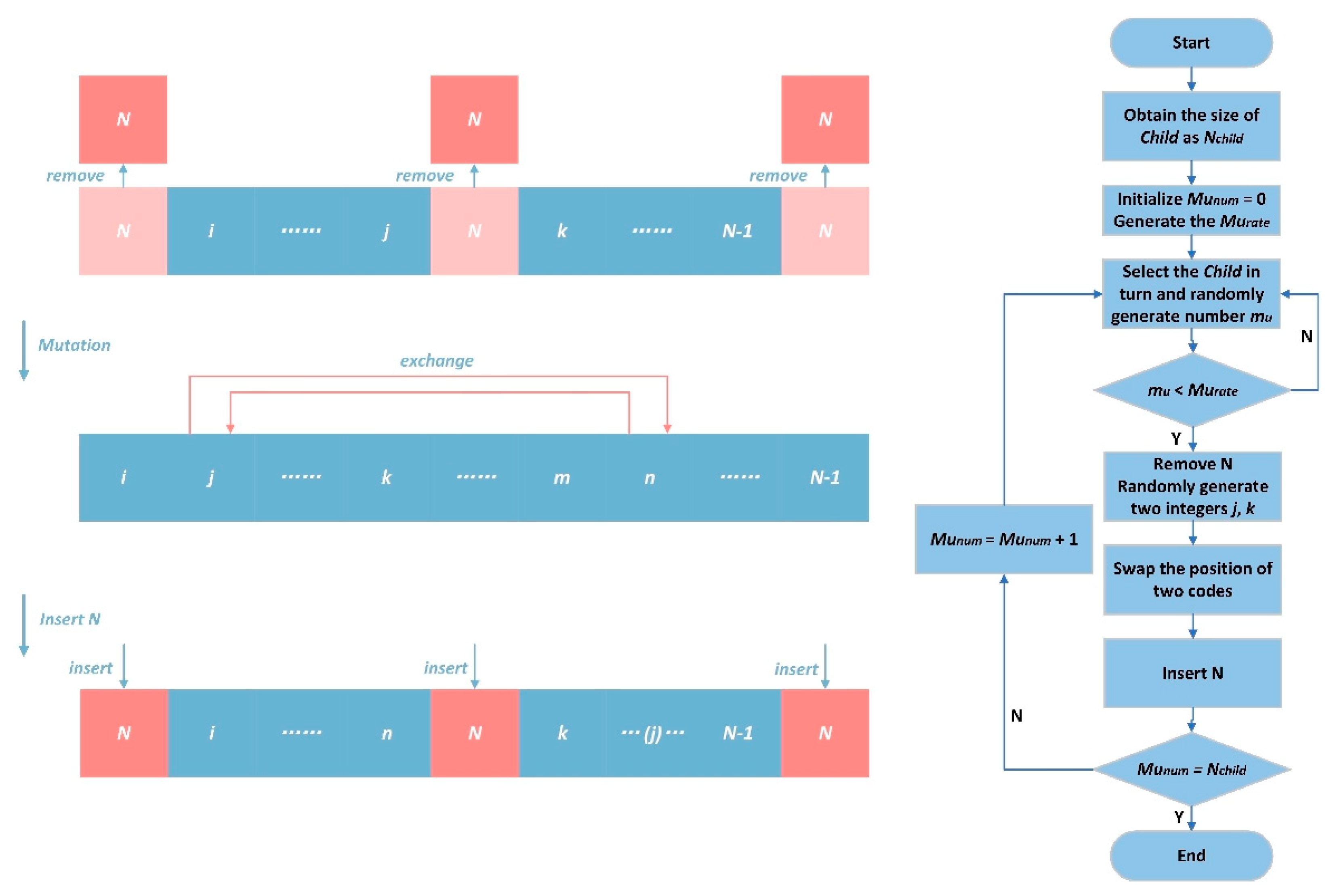
2.5.7. Mutation Operator
3. Simulation Environment
3.1. The PDT Agent
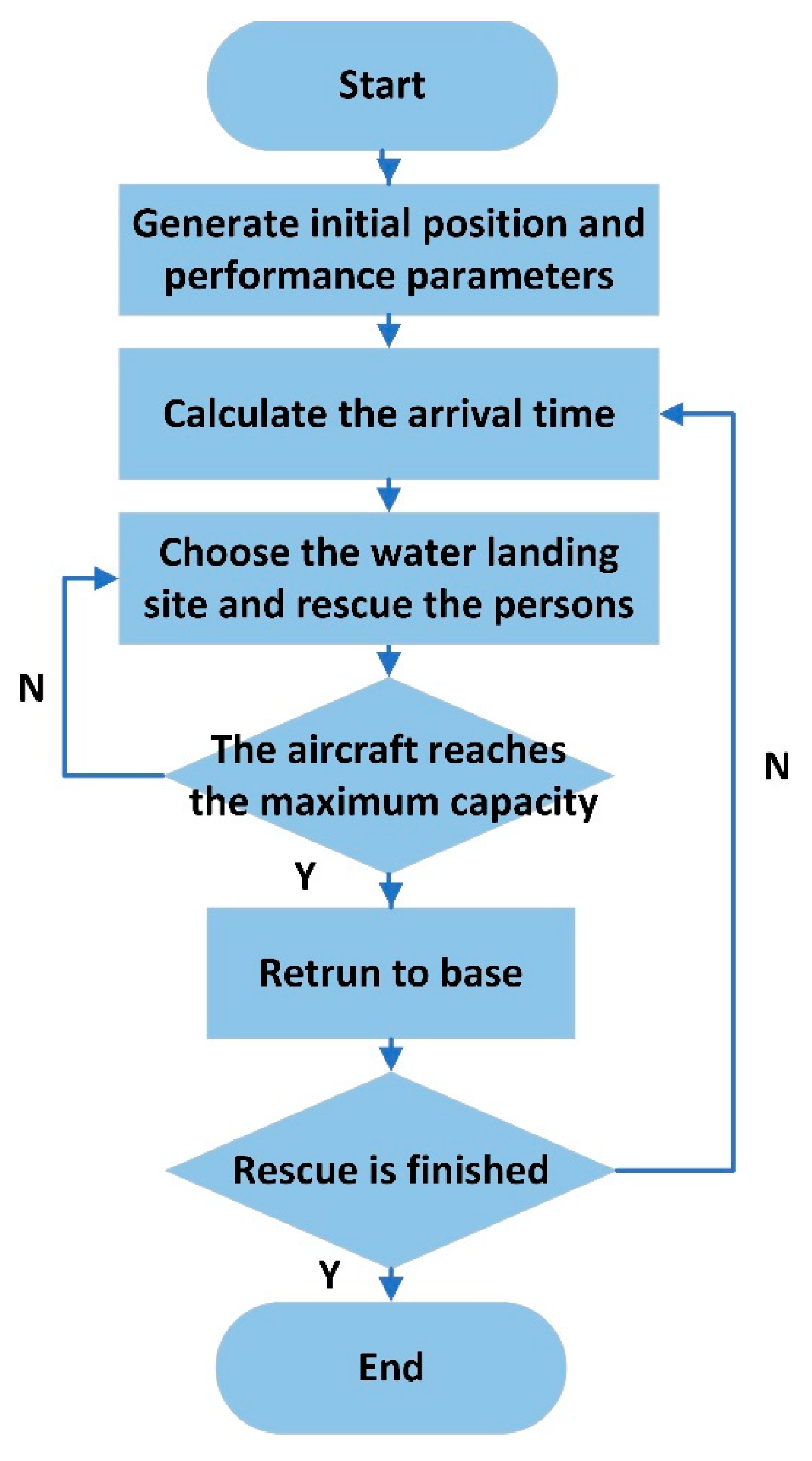
3.2. The Amphibious Aircraft Agent
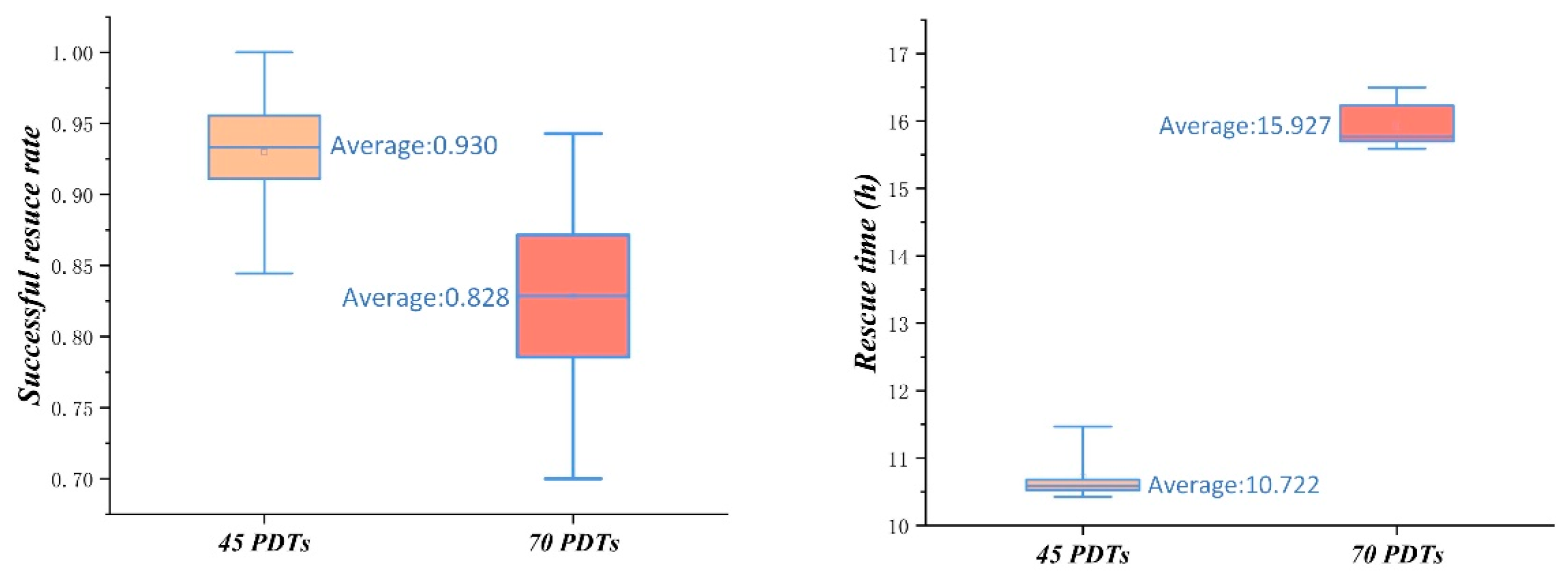
4. Simulation Case and Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Cheng, M. Development suggestions of maritime emergency rescue work under background of maritime power construction in China. Shipp. Manag. 2021. [Google Scholar] [CrossRef]
- Xie, R.; Luo, M.; Chen, Z.; Liu, W. A multi-CBR algorithm based on comprehensive evaluation for operation planning of helicopter. IEEE Access 2020, 8, 24110–124122. [Google Scholar] [CrossRef]
- Alotaibi, E.T.; Alqefari, S.S.; Koubaa, A. LSAR: Multi-UAV Collaboration for Search and Rescue Missions. IEEE Access 2019, 7, 55817–55832. [Google Scholar] [CrossRef]
- Sun, X.; Liu, H.; Wu, G.; Zhou, Y. Training effectiveness evaluation of helicopter emergency relief based on virtual simulation. Chin. J. Aeronaut 2018, 10, 2000–2012. [Google Scholar] [CrossRef]
- Bezgodov, A.; Esin, D. Complex Network Modeling for Maritime Search and Rescue Operations. Procedia Comput. Sci. 2014, 29, 2325–2335. [Google Scholar] [CrossRef]
- Zheng, R.; Yang, R.; Lu, K.; Zhang, S. A Search and Rescue System for Maritime Personnel in Disaster Carried on Unmanned Aerial Vehicle. In Proceedings of the 2019 18th International Symposium on Distributed Computing and Applications for Business Engineering and Science (DCABES), Wuhan, China, 8–10 November 2019; pp. 43–47. [Google Scholar]
- Ho, W.-C.; Shen, J.-H.; Liu, C.-P.; Chen, Y.-W. Research on Optimal Model of Maritime Search and Rescue Route for Rescue of Multiple Distress Targets. J. Mar. Sci. Eng. 2022, 10, 460. [Google Scholar] [CrossRef]
- Zhang, A.; Sui, H. An Intelligent Maritime Search and Rescue Directing System. In Proceedings of the SPIE, Wuhan, China, 28–29 October 2006; Volume 6421, pp. 601–607. [Google Scholar] [CrossRef]
- Wang, R.; Li, H.; Yang, Z.; Zhou, H. Research on the Construction of Aviation Distress and Maritime Search and Rescue System. In Proceedings of the 2017 2nd International Conference on Mechatronics and Information Technology, Xi’an, China, 26–27 August 2017; p. 7. [Google Scholar] [CrossRef]
- Song, Y.; Wang, N. Exploring Temporal and Spatial Evolution of Global Coal Supply-Demand and Flow Structure. Energy 2019, 168, 1073–1080. [Google Scholar] [CrossRef]
- Zhao, R.; Xie, X.; Yu, W. Repair Equipment Allocation Problem for a Support-and-Repair Ship on a Deep Sea: A Hybrid Multi-Criteria Decision Making and Optimization Approach. Expert Syst. Appl. 2020, 160, 113658. [Google Scholar] [CrossRef]
- Jin, Y.; Wang, N.; Song, Y.; Gao, Z. Optimization Model and Algorithm to Locate Rescue Bases and Allocate Rescue Vessels in Remote Oceans. Soft Comput. 2021, 25, 3317–3334. [Google Scholar] [CrossRef]
- Guo, Y.; Ye, Y.; Yang, Q.; Yang, K. A Multi-Objective INLP Model of Sustainable Resource Allocation for Long-Range Maritime Search and Rescue. Sustainability 2019, 11, 929. [Google Scholar] [CrossRef]
- Weiwei, Z.; Yuanyang, Y.; Ting, S.; Yuechen, Z. Analysis of Main Influence Factors and Algorithm of Flight Distance for Rescue Helicopter at Sea. In Proceedings of the 2019 5th International Conference on Transportation Information and Safety (ICTIS), Liverpool, UK, 14–17 July 2019; pp. 13–15. [Google Scholar]
- Sheng, J. Introduction to helicopter far sea search and rescue. China Water Transp. 2017, 17, 48+150. [Google Scholar]
- Wei, G.; Cheng, X.; Wu, X. Thoughts on improving the ability of maritime emergency rescue by using large-scale amphibious aircraft”. Chin. J. Disaster Med. 2022, 10, 334–338. [Google Scholar] [CrossRef]
- Wang, F.; Zhao, J.; Zhao, X.; Gao, X. Research on the application of large amphibious aircraft in maritime search and rescue in the South China Sea. China Water Transp. 2015, 15, 79–80. [Google Scholar]
- Hang, L.; Jiang, M.; Yong, M. Large amphibious rescue aircraft-future amphibious platform for maritime search and rescue. In Proceedings of the 8th China International Rescue and Salvage Conference, Kitakyushu, Japan, 30 November–2 December 2014; pp. 43–47. [Google Scholar]
- Fei, P.; Lu, C. A large amphibious aircraft maritime search technology research. Sci. Technol. Innov. 2018, 19–20. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, Y.; Luo, G.; Cui, B. Effects of Freezing Temperature and Salinity on the Adhesion Shear Strength of Amphibious Aircraft Tires under Static Icing. Aerospace 2022, 9, 170. [Google Scholar] [CrossRef]
- Conesa, F.R. Numerical Investigation of Cavitation Performance of Slotted Hydrofoil for Amphibious Aircraft. Struct. Congr. 2018, 126, 18. [Google Scholar]
- Seth, A.; Liem, R.P. Takeoff Analysis of Amphibious Aircraft with Implementation of a Hydrofoil. Struct. Congr. 2018, 19. [Google Scholar]
- Wang, L.; Yin, H.; Yang, K.; Liu, H.; Zhu, J. Water Takeoff Performance Calculation Method for Amphibious Aircraft Based on Digital Virtual Flight. Chin. J. Aeronaut. 2020, 33, 3082–3091. [Google Scholar] [CrossRef]
- Seth, A.; Liem, R.P. Hydrofoil Conceptual Design and Optimization Framework for Amphibious Aircraft. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019. [Google Scholar]
- He, X. Large firefighting/water rescue amphibious aircraft first flight in 2013. Sci. Technol. Dly. 2009, 9. [Google Scholar]
- Yang, Y.; Mao, Y.; Xie, R.; Hu, Y.; Nan, Y. A Novel Optimal Route Planning Algorithm for Searching on the Sea. Aeronaut. J. 2021, 125, 1064–1082. [Google Scholar] [CrossRef]
- Zhou, K. Analysis on the site selection of a large amphibious aircraft on water Airport. Civ. Aviat. Manag. 2018, 330, 41–43. [Google Scholar]
- Du, B.; Xiong, W.; Du, H. AG600 Amphibious Aircraft Selection Model Based on Improved Fuzzy Evaluation Algorithm. Comput. Intell. Neurosci. 2022, 2022, 2358264. [Google Scholar] [CrossRef] [PubMed]
- Xiong, W.; Hu, C.; Du, B. Risk assessment of large amphibious aircraft AG600 landing in water. J. Saf. Environ. 2022, 9, 1–10. [Google Scholar] [CrossRef]
- Wu, Z. Research on the Sea Rescue of Large Amphibious Aircraft. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2018. [Google Scholar]
- Futch, V.; Allen, A. Search and Rescue Applications: On the Need to Improve Ocean Observing Data Systems in Offshore or Remote Locations. Front. Mar. Sci. 2019, 6, 301. [Google Scholar] [CrossRef]
- Xiong, P.; Liu, H.; Tian, Y.; Chen, Z.; Wang, B.; Yang, H. Helicopter Maritime Search Area Planning Based on a Minimum Bounding Rectangle and K-Means Clustering. Chin. J. Aeronaut. 2021, 34, 554–562. [Google Scholar] [CrossRef]
- Liu, H.; Chen, Z.; Tian, Y.; Wang, B.; Yang, H.; Wu, G. Evaluation Method for Helicopter Maritime Search and Rescue Response Plan with Uncertainty. Chin. J. Aeronaut. 2021, 34, 493–507. [Google Scholar] [CrossRef]
- Pang, Y.; Zhao, H.; Wang, M.; Zhou, Y. Marine Rescue Target Assignment Method Based on Multi-String Chromosome Genetic. In Proceedings of the 2019 11th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Zhuhai, China, 22–24 August 2019; Volume 2, pp. 255–259. [Google Scholar]
- Ma, Q.; Zhang, D.; Wan, C.; Zhang, J.; Lyu, N. Multi-Objective Emergency Resources Allocation Optimization for Maritime Search and Rescue Considering Accident Black-Spots. Ocean. Eng. 2022, 261, 112178. [Google Scholar] [CrossRef]
- Xiong, P.; Liu, H.; Tian, Y.; Chen, Z. A Time Domain-Based Iterative Method for Helicopter Maritime Search Area Planning and Construction of the Simulation Environment. IEEE Access 2020, 8, 191460–191471. [Google Scholar] [CrossRef]
- Chen, Z.; Liu, H.; Tian, Y.; Wang, R.; Xiong, P.; Wu, G. A Particle Swarm Optimization Algorithm Based on Time-Space Weight for Helicopter Maritime Search and Rescue Decision-Making. IEEE Access 2020, 8, 81526–81541. [Google Scholar] [CrossRef]
- Wang, W.; Liu, J.; Luo, Y. Multi-Agent simulation study on emergency rescue of large-scale petrochemical fire. Fire Sci. Technol. 2020, 2, 391. [Google Scholar]
- Li, Y. Modeling and Optimization of Discrete Event Systems Based on Petri Net. Master’s Thesis, North China Electric Power University, Baoding, China, 2018. [Google Scholar]
- Zhai, D. Equipment system modeling and simulation based on system dynamics. Master’s Thesis, Xidian University, Xi’an, China, 2021. [Google Scholar]
- Liu, X.; Zhang, K. A study of sea drift model based on Monte Carlo method. China Water Transp. 2017, 17, 32–34. [Google Scholar]
- Teknomo, K. K-Means Clustering Tutorial. Medicine 2006, 100, 3. [Google Scholar]
- Ralambondrainy, H. A Conceptual Version of the K-Means Algorithm. Pattern Recognit. Lett. 1995, 16, 1147–1157. [Google Scholar]
- Ghosh, S.; Dubey, S.K. Comparative Analysis of K-Means and Fuzzy c-Means Algorithms. Int. J. Adv. Comput. Sci. Appl. 2013, 4, 4. [Google Scholar] [CrossRef]
- Coello, C.A. An Updated Survey of GA-Based Multiobjective Optimization Techniques. ACM Comput. Surv. (CSUR) 2000, 32, 109–143. [Google Scholar] [CrossRef]
- Cus, F.; Balic, J. Optimization of Cutting Process by GA Approach. Robot. Comput.-Integr. Manuf. 2003, 19, 113–121. [Google Scholar]
- Tanaka, M.; Watanabe, H.; Furukawa, Y.; Tanino, T. GA-Based Decision Support System for Multicriteria Optimization. In Proceedings of the 1995 IEEE International Conference on Systems, Man and Cybernetics. Intelligent Systems for the 21st Century, Vancouver, BC, Canada, 22–25 October 1995; Volume 2, pp. 1556–1561. [Google Scholar]
- Montenegro, B.D.G.; Sörensen, K.; Vansteenwegen, P. A Large Neighborhood Search Algorithm to Optimize a Demand-Responsive Feeder Service. Transp. Res. Part C Emerg. Technol. 2021, 127, 103102. [Google Scholar] [CrossRef]
- Bae, J.W.; Shin, K.; Lee, H.-R.; Lee, H.J.; Lee, T.; Kim, C.H.; Cha, W.-C.; Kim, G.W.; Moon, I.-C. Evaluation of Disaster Response System Using Agent-Based Model with Geospatial and Medical Details. IEEE Trans. Syst. Man Cybern Syst. 2018, 48, 1454–1469. [Google Scholar] [CrossRef]
- Ling, L.; Yao, J. Simulation of ABM Based on Mesa. Comput. Telecommun. 2021, 6. [Google Scholar] [CrossRef]
- Xiao, L. Development of Aero-engine Simulation Platform Based on Python. Comput. Appl. Softw. 2021, 6. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance Parameters | Value |
|---|---|
| initial position | 31°9′0″ N, 121°48′21.6″ E |
| cruising speed (km/h) | 480 |
| aircraft guarantee time (refuel, transfer of the persons in distress, etc.) (min) | 30 |
| the maximum rescue capability (person) | 30 |
| number of lifeboats | 1 |
| lifeboat speed (km/h) | 28 |
| lifeboat voyage (km) | 92.6 |
| the maximum rescue capability of the lifeboat (person) | 5 |
| time to rescue one person of lifeboat (min/person) | 5 |
| Simulation Results | Value |
|---|---|
| Successful rescue rate | 91.1% |
| Rescue time (h) | 10.62 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, L.; Yin, R.; Xue, Y.; Tian, Y.; Liu, H. A Time-Domain Planning Method for Surface Rescue Process of Amphibious Aircraft for Medium/Distant Maritime Rescue. Appl. Sci. 2023, 13, 2169. https://doi.org/10.3390/app13042169
Yang L, Yin R, Xue Y, Tian Y, Liu H. A Time-Domain Planning Method for Surface Rescue Process of Amphibious Aircraft for Medium/Distant Maritime Rescue. Applied Sciences. 2023; 13(4):2169. https://doi.org/10.3390/app13042169
Chicago/Turabian StyleYang, Lu, Rong Yin, Yuanbo Xue, Yongliang Tian, and Hu Liu. 2023. "A Time-Domain Planning Method for Surface Rescue Process of Amphibious Aircraft for Medium/Distant Maritime Rescue" Applied Sciences 13, no. 4: 2169. https://doi.org/10.3390/app13042169
APA StyleYang, L., Yin, R., Xue, Y., Tian, Y., & Liu, H. (2023). A Time-Domain Planning Method for Surface Rescue Process of Amphibious Aircraft for Medium/Distant Maritime Rescue. Applied Sciences, 13(4), 2169. https://doi.org/10.3390/app13042169