Abstract
Electronic remote identification (ER-ID) is a new radio frequency (RF) technology that is initiated by the Federal Aviation Authorities (FAA). For security reasons, traffic control, and so on, ER-ID has been applied for drones by the FAA to enable them to transmit their unique identification and location so that unauthorized drones can be identified. The current limitation of the existing ER-ID algorithms is that the application is limited to the Wi-Fi and Bluetooth wireless controllers, which results in a maximum range of 10–20 m for Bluetooth and 50–100 m for Wi-Fi. In this study, a mathematical computing technique based on finite state automaton (FSA) is introduced to expand the range of the ER-ID RF system and reduce the energy required by the drone to use the technology. A finite number of states have been designed to include a larger range of wireless network techniques, enabling the drones to be recognized while they are further away and in remote areas. This is achieved by including other means of RF channels, such as 4G/5G, Automatic Dependent Surveillance-Broadcast (ADS-B), long range Internet of things (IoT), and satellite communications, in the suggested ER-ID algorithm of this study. The introduced algorithm is tested via a case study. The results showed the ability to detect drones using all types of available radio frequency communication systems (RF-CS) while also minimizing the consumed energy. Hence, the authorities can control the licensed drones by using available RF-CS devices, such as Bluetooth and Wi-Fi, which are already widely used for mobile phones, as an example.
1. Introduction
Drones are an essential part of our life that are found in various fields, such as leisure, commercial activities, and military applications [1,2]. Since the early years, drones have started to create security issues in the skies, especially in situations where people use drones to take photos and videos. Thus, aviation agencies around the world, such as the Federal Aviation Authority (FAA), have started to take actions to regulate drone traffic and secure the skies. The FAA in the USA has launched the electronic remote identification (ER-ID) initiative to regulate drones as a kind of a license plate number (LPN). The LPN has been transmitted through RF communication to denote drones’ unique data [3,4]. Similarly, in Europe, the European Union has launched the European Network of U-Space Demonstrators for drone regulations, which will be enforced in January 2023 [5,6]. The most notable implementation of the new U-Space regulations framework is the implementation of the Swiss U-Space [7,8]. In the Swiss U-Space, the first nationwide network ER-ID service (called SUSI) was developed and launched [9,10]. The Swiss U-Space represents an online platform to monitor drones with the help of the Linux Foundation’s project called Inter USS Platform.
The importance of ER-ID is that aviation authorities and neighborhood aircraft and civilians can receive information about the drones. This information can be presented on the internet, so authorized users can see information about drones, including their registration number and flight information, such as speed and altitude [11,12]. However, the ER-ID can be defined as a LPN that is assigned to a corresponding drone in order to send drone information during a flight including: ID number, location, altitude, velocity, elevation, time mark, and emergency status [13,14]. ER-ID, currently, uses Bluetooth and Wi-Fi to provide all the above-mentioned drone information [15,16], but these are very limited in range (about 100 m for current Bluetooth class 1, 10 m for the most common Bluetooth class 2, and approximately 100 to 150 m outdoors for Wi-Fi) [17,18]. Thus, the ER-ID cannot be received throughout the whole of a drone’s flight, which usually takes a few kilometers for commercial drones, and hundreds of kilometers for professional drones and military drones.
In turn, considering other wider range RF communication devices, such as 4G/5G, Automatic Dependent Surveillance-Broadcast (ADS-B), long range Internet of things (IoT), and satellites, are essential to be studied as extensions of ER-ID. To the best of our knowledge, none of the current commercial and scientific proposals have designed an ER-ID algorithm that uses all the available RF communication devices in fusion at the same time. This demands the implementation of an advanced ER-ID that allows drones and aviation authorities to receive the LPN throughout the whole of a drone’s flight, in every terrain, with unlimited range. Consequently, it will provide the authorities with the ability to remote control the aircraft and guide the drones through the wide range RF channels. Therefore, a new wider range ER-ID algorithm is essential to be developed that takes into account the following communication devices: 4G/5G, ADS-B, long range IoT, and satellites.
This study introduced a new algorithm to the ER-ID so that the process of detecting LPN of drones can be done in limitless range. The new algorithm has increased the lifetime of the battery energy of the drone. This is achieved by designing a finite state automaton (FSA) for transmitting the ER-ID data through Bluetooth, Wi-Fi, 4G/5G, ADS-B, long range IoT, and satellites. In this work, we introduce such a method and implement it in a case study that was used as a proof of concept. The method is implemented in a special scenario to detect the LPN of a drone automatically depending on where the drone is and what available RF communication devices are in the area.
The rest of the paper is organized as follows. Section 2 introduces the types of the RF communication devices. In Section 3, the features of the wireless network controllers of drones are presented. In Section 4, the structure of the developed FSA is explained in detail. In Section 5, a case study is presented to verify the designed FSA. In Section 6, the conclusions and the recommendations for future work are presented.
2. RF Communication Devices
2.1. Bluetooth and Wi-Fi
Bluetooth is a well-established technology that has been applied in networks by researchers and industry with many algorithms and implementations. It has a communication protocol that utilizes low powered networking technology developed by Ericsson, with the aim to be used as an alternate to cable communication in computer peripherals, such as mouse, keyboards, printers, and other connected devices. Bluetooth has been proposed for the deployment in smart cities due to the ease of connection with smartphones for all users. Bluetooth uses the Bluetooth Protocol Stack function for the following mains components: Bluetooth radio, baseband, link manager protocol, logical link control of adaptation protocol, and service discovery protocol [19,20]. Bluetooth range is 10 m in the most common class 2 form, and now is widely used in smartphones and laptops to transmit and receive information. Although the initial goal was to implement Bluetooth as a replacement to cords, it is now becoming the standard for ad hoc networks due to its low power and characteristics. Bluetooth is capable of transmitting 1 Mb/s while using 1 tenth of the power required by Wi-Fi, thus making it very suitable for ad hoc networks. [21,22].
Another popular wireless technology is Wi-Fi. Wi-Fi is the most widely used technology for wireless high speed internet communications for computers and smartphones. Wi-Fi is an industry standard codenamed “802.11b” by the Institute of Electrical and Electronics Engineers (IEEE), and is a class of certified wireless networking products [23,24]. The crucial turning point of Wireless Local Area Network (WLAN) technologies was the year 1985, because this year IEEE started to standardize the Wi-Fi technology with the IEEE “802.11”. Prior to this date, many companies and research laboratories around the world have researched and implemented Wi-Fi-like technologies. In 1980, IBM‘s Rueschlikon Laboratory [25,26] researched infrared (IR) technology and WLANs manufacturing floors. Around the same time period, HP’s Palo Alto Laboratory designed a WLAN prototyped with a direct sequence spread spectrum. Aloha Academic’s research was not far behind them when they implemented the ALOHA wireless system from the University of Hawaii. The ALOHA system had a 9600 bps wireless bandwidth and was the predecessor of today’s 4G/5G, since the Aloha System inspired Ericsson to make the Mobitex, the first early cellular wireless system [27,28]. Since that era, the Wi-Fi has been an essential technology for our daily lives. It has also transformed the technology around cellular networks, such as 4G/5G, and many other wireless communication protocols. Wi-Fi and its associated technologies have revolutionized our lives and changed them forever, and it has had a transformative effect that has encouraged the rapid expansion of computer and smartphone technology.
2.2. 4G/5G Mobile Technology
In the mobile field, 4G Long Term Evolution (LTE) Technology is the most widely used and advanced mobile network technology with more than 100 billion connections [29,30]. The current 5G technology is at least 100 times faster than 4G [31,32]. 5G is incorporating new features, such as massive IoT connectivity, and offers much more functionalities than 4G by incorporating more and higher interconnectivity among smartphone devices, people, IoT, objects, and possibly drones. However, 5G, due its high bandwidth, has a serious disadvantage: it needs multiple antennas to serve an area. This is due to the fact that high bandwidth antennas have a limited range of 1 km. Thus, cities will need a vast array of antennas to serve 5G. 5G achieves a very high rate of broadband internet connection by using 100 antennas on each cell station, compared to just 10 antennas for 4G. Also, it has high interconnectivity among different devices and objects, smart homes, IoT, and computers. It also has the opportunity to incorporate a larger range of bandwidths (6 GHz to 100 GHz), compared to 4G that operates only around the 6 GHz area. 5G also incorporates machine learning and deep learning techniques to improve the quality of the telecommunication service in different areas, such as network slice admission control algorithm, 5G security, optimal 5G network slicing, resource allocation, network traffic prediction, and many others topics.
5G is one of the most prominent technologies that is currently transforming the world. Certainly, it is the most prominent RF technology that is transforming and changing humanity, not only in a technological way, but also sociologically. 5G has already created competition between various companies over who is going to apply the fastest and most reliable 5G service, especially in the mobile technology sector. The most prominent companies in this field of technology, Ericsson and Huawei, have spent billions of Euros on 5G to create a wave of new technologies and global diplomacy policies.
2.3. IoT Technology
The IoT is a relatively new technology that uses the operating principles of radars. Its usability relies on the fact that it operates with low power [33,34,35,36,37]. Thus, objects with a small battery can transmit very small packets of information to long distances. IoT devices are used to transmit limited data. Some examples are smart homes, devices that do not have a power source, drones that transmit and receive information from other objects with low power consumption, and satellites that collect data from objects and devices in remote areas, but there are many other applications. IoT is limited by the fact that it cannot transmit continuously at a high data rate. Generally, IoT devices have the following four characteristics: long range up to 18 km (sometimes much more, such as in space applications), long battery lifetime up to 10−20 years, the ability to utilize free and public networks, and low costs for devices and infrastructure.
2.4. Satellites
Satellites are becoming more and more important parts of telecommunications. Currently, the most important satellite communication tool is the Global Navigation Satellite System (GNSS), which provides very accurate information about an object’s position in space. There are many GNSS providers, the most notable are GPS from the USA, Glonass from Russia, Galileo from Europe, and Beidou from China. Drones are using GNSS services for almost every activity that they do: calculating their position in space, controlling their guiding of motors, calculating their distance from the remote control and home point, and many other functions [38,39]. The military use communication satellites to control drones remotely beyond their line of sight [40,41], enabling real time first person capabilities. In the last few years, Internet satellite constellations have been designed and deployed, with the goal to provide a real global Internet connection.
2.5. ADS-B Technology
ADS-B technology is a relatively new system in civil aviation aiming to replace radar based systems [42,43]. ADS-B has the ability to be operated in an automatic manner that transmits and operates automatically without interference from the pilot [44,45]. ADS-B broadcasts information about the aircraft’s position and speed, the surrounding weather and environmental conditions, GPS information, and many other data. It has two parts, ADS-B IN and ADS-B OUT. ADS-B IN receives information regarding other surrounding aircrafts and weather information and displays this data in the cockpit in a graphical weather display. ADS-B OUT transmits information about the aircraft’s position, speed, altitude, and identification once per second [46,47]. ADS-B is designed to be a more accurate system than radars, and it provides a very accurate information and communication link between aircrafts and aircraft control towers. Some commercial drone manufacturers have already included ADS-B IN in their products, such as Dà-Jiāng Innovations’ (DJI) Mavic Air [48,49]. DJI displays the ADS-B information in the remote control gadget of the drone operator in order to improve overall flight security and to avoid any aircraft collisions [50,51]. The FAA in the USA has made a regulation that categorized all class A, B, C, and E aircraft flying into their airspace must include ADS-B in their design [52,53].
3. Wireless Network Controllers of Drones
There are various RF communications systems that can be used in drones. Each one of them has specific characteristics regarding frequency, transmission speed rate, range, power, and many other factors. Table 1 summarizes the main features of the RF communications systems in order to understand their usefulness and characteristics [52,53]. Beside this, this table provides the essential data for communicating with drones, which determines which of the appropriate available RF communications system to select and use autonomously according to a predefined scenario and flight case.

Table 1.
Main features of various RF communications systems.
According to Table 1, the cost is significant only for satellite communications, particularly for person-viewing capabilities, but not for transmitting electronic identification. Many RF modems are already embedded in commercial drones, and the cost of adding a GPRS modem and IoT device is not a critical factor. Modern IoT devices, particularly within cities, can connect to both local smart cities IoT-deployed networks and satellites at low cost. As many commercial devices already use Bluetooth, GNSS, and GPRS RF modems for remote control, the cost factor for the majority of these devices is already included. As presented in Table 1, Bluetooth is a very good RF communication technique for low power and short distance situations, which is considered as the standard for IoT devices. Wi-Fi is the most suitable tool for high data Internet communications in applications that include a local computer, smartphone, and an IoT device network. However, Wi-Fi consumes a lot of electricity and it is limited in range, as is Bluetooth. 4G/5G is the most useful RF communications system, after the remote control, for first person viewing, remote guiding, and piloting the drones. Their usefulness comes from the fact that it has a vast network of antennas. Due to the fact that they are applied by the smartphone industry, their capabilities, bandwidth, and range are still expanding. Regarding LoRaWan IoT, as shown in Table 1, although it can achieve very long distances with very low power, it has a very low transmission rate. Thus, it cannot be used for first person view capabilities, extra-long and high data message transmission, and any other high data rate applications.
ADS-B is not currently deployed in drones because it is a new commercial aircraft telecommunications system technology. Its initial design goal was to be more accurate than the current radar civil aviation systems, to provide accurate information about aircraft position in space, and to provide other important information to pilots, such as weather information. Some commercial drone manufacturers use it to receive information about surrounding aircraft in order to avoid collisions. ADS-B is a very useful tool for aircraft-to-aircraft communication since all aircraft will have it in the future. Satellite communications are the most suitable tool of communication for very long-range flight scenarios and especially above the sea where there are no antennas in the ground to receive information about the drones. Military drones extensively use satellite communications for first person view capabilities. Commercial drones use satellites for GPS communications and to carry small satellite modules that can send and receive very little data, suitable to give only commands.
4. Finite State Automaton in ER-ID
Connecting to the relevant local aviation authority and transmitting its electronic ID is accomplished by the drone via the use of the RF communication method that is selected on an as-needed basis (GPRS, IoT, ADS-B, satellite, Bluetooth/Wi-Fi). The authority in charge of aviation in the area is able to transmit orders to the drone if necessary.
Applying ER-ID to drones is essentially enables the identification of the LPN of unknown drones in a certain flight path. This can be challenging when multiple heterogeneous potential RF communication systems (RF-CSs) are available. In this case, the task of determining which RF-CS will detect the LPN of a drone in a certain flight path should be precisely specified.
A GPRS modem enables a drone to establish a connection to a 4G or 5G network. This GPRS modem is then linked to the computer that is housed on the drone, such as a Raspberry Pi. When the computer is ready to utilize the 4G/5G network, it sends a command to the GPRS modem, instructing it to deliver the electronic ID of the drone. During this time, the computer is performing the algorithm that was generated by the state machine.
In terms of ADS-B, the drone is outfitted with a modem designed specifically for use with drones (similar to the ADS-B OUT modems DJI uses for some of their drones). As an example, drones that are located in close proximity to airports are required to broadcast their location to adjacent civilian aircraft. Additionally, drones must utilize ADS-B out to convey their electronic identification and ADS-B data.
Regarding the use of IoT, the drone has a specific long range IoT device (such as lora or sigfox), which may be linked at will to the lora network or the sigfox IoT network, or to the 6G IoT network. When the drone wishes to utilize IoT to communicate its electronic ID (in order to conserve energy since IoT is highly energy efficient), the drone will use its IoT modem. The instruction to communicate the information along with it is sent to the IoT device by the central computer on the drone. Subsequently, the IoT modem connects to the accessible IoT network and transmits the electronic ID.
Due to the size of their modems, larger drones are an excellent candidate for satellite communication (military drones already have a satellite modem fitted, enabling them to engage in real-time communication). When the drone is located in an isolated region or at a very high altitude, the need to utilize an RF-CS may be circumvented by employing satellite communications instead. When the central computer needs to send or receive data, it issues orders to the RF satellite modem. The RF satellite modem then reacts and begins to receive more commands from the central computer on the drone. Following this, the primary computer sends a command to the RF satellite modem, instructing it to deliver the electronic ID.
Drones are equipped with a Bluetooth device that allows them to connect to the local Bluetooth network used by mobile devices. Once connected, the drones are able to transmit their electronic identifiers to the Internet via the mobile devices.
This section presents an algorithm of FSA with ER-ID by developing a transmitting model from the following allocation RF-CSs; Bluetooth, Wi-Fi, 4G/5G, ADS-B, long range IoT, and satellites. Initially, the ER-ID process is denoted by explaining the problem that needs to be solved as state behavior and presenting the transmission of the drone’s license. Various state behaviors are developed in this study to enhance the process of selecting the appropriate RF-CS, thus maximizing both the range of the RF signal for the ER-ID propagating and the battery energy efficiency.
4.1. State Flow Parameters
The drone should make a suitable decision about the process of selecting the RF communication channel to minimize consumed energy. This type of decision is relatively difficult because the future RF-CS that the drone will encounter on its mission is unknown. Detecting new RF communication signals is continuously happening since the drone flies in many different areas, continents and airspaces. Also, the available transceiver, antennas, and other local aircraft and drones are constantly changing. Beside this, it may be that the already detected signal is lost for a period of time. However, selecting the right RF communication signal is dependent on two variables: range and consumed energy. The range of RF-CSs, as explained in Table 1 and depicted in Figure 1, can be arranged in ascending manner as: Bluetooth (10 m), Wi-Fi (50 m indoors, 100 m outdoors), 5G (up to 1000 m), IoT (up to 15,000 m), 4G (16,000 m), ADS-B (200,000 m), and satellite (from 400,000 m to 1,000,000 km). On the other hand, the RF-CSs can be arranged ascending manner in term of power as: ADS-B (0.1 mW), IoT (0.15 mW), Bluetooth (56.7 mW), Wi-Fi (58 mW), 4G (258.1 mW), satellite (283.1 mW), and 5G (463.1 mW). These variables, range and consumed energy, should be taken in consideration during the transmission from one state to another during drone missions.
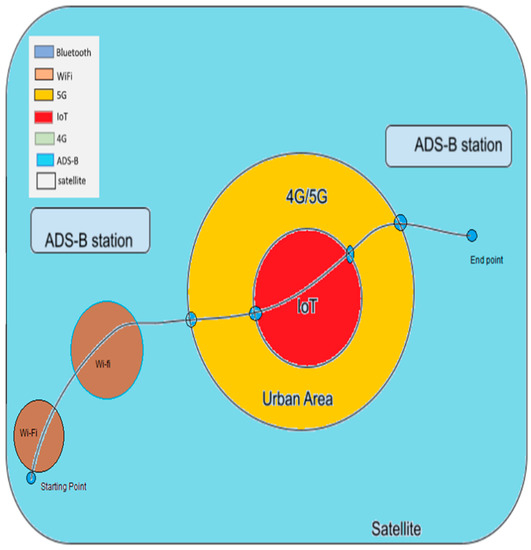
Figure 1.
An example of a drone mission through various RF-CSs in different regions.
4.2. Territorial Presentation
This section assumes territorial drone ER-ID design in sub-regions that are located in various areas in the world, as shown in Figure 1. Since each sub-region is an autonomous decision maker, the RF-CS type is not selected by the territorial authority. Rather, the territorial authority assigns the initial drone license to the sub-region, and after that, each sub-regional authority activates RF-CS decisions under the proposed algorithm based on RF-CS range and consumed energy. This will provide fair dealing in the RF-CS and save drone batteries while in flight. Thus, the territorial authority impacts the autonomous decision making of each sub-regional RF-CS by checking the drone ER-ID. In this way, each sub-regional authority tries to satisfy their requirement of decreasing the loads on their RF-CSs.
Assume the wireless network system shown in Figure 2 where drone-ID remotely detected by many potential RF-CSs. The drone system receives a number of RF signals from the wireless network system as inputs and results in a specific connection to a potential RF-CS to inspire the ER-ID process.
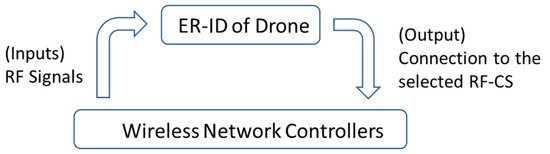
Figure 2.
ER-ID control system.
The connection process to a required RF-CS is achieved by applying the following conditions:
If (input RF signal conditions) then (output connect to the RF-CS)
The conditions of the RF signal are generated depending on Boolean expression. For instance:
Bluetooth True is used to explain that the drone receives an RF signal from Bluetooth.
Wi-Fi False is used to explain that the drone does not receive an RF signal from Wi-Fi.
Bluetooth True and Wi-Fi False is used to explain that the drone receives an RF signal from Bluetooth and does not receive an RF signal from Wi-Fi.
4.3. State Transition Diagram
The conditions that determine the identification of drones are complex and include sub-regions, multi-RF-CSs, battery energy, response time of detecting RF signals, availability of RF communications signal, possible local country aviation authority regulations, ADS-B readings from other aircrafts and other drones, and local restrictions on flights due to events, geofencing, and local airports. Satellite communications and GNSS readings for GPS are also involved. The electronic ID is a solution for RF communications and a method of identifying a drone to local aviation authorities, allowing them to send their electronic ID and receive information and possible commands from the local aviation authority. As GNSS is used for GPS or Glonass to pinpoint an object in space and time, it is not supported by our ER-ID RF communication solution. It is true that drones use GNSS to control their flight, and that modern drones use it to locate themselves, but this is not required because drones use gyroscopes in conjunction with control algorithms and PID controllers to position themselves in space and time. As a result, GNSS is important but not required for an object to fly from point A to point B, just as rockets and drones have gyroscopes to fly from point A to point B if GNSS is unavailable. As a result, in areas such as forests where GNSS, GPRS, IoT, and ADS-B are unavailable, we rely on satellites to transmit electronic IDs and gyroscopes to position ourselves in space and time. Thus, it is impossible to find the exact mathematical expression of the ER-ID process. In turn, control techniques that depend on the mathematical equations cannot be implemented to control this kind of operation. The FSA technique is applied to control real systems dependent on knowing only the Boolean logic conditions that realize the output of the system. In this section, the state transmission diagram is developed to identify the technique that will be used in this study to ER-ID of drones. Two elements are applied which are a circle and an arc. The circle, i.e. the state, represents the available RF-CSs in the path of the drone, while the arc represents the transition from one state to another when the Boolean algebra explained in Section 4.2 is achieved. The diagram of the transition is depicted in Figure 3. Figure 3 explains the details of the developed state machine of 8 states. The following state abbreviations are considered: A, IoT, B, W, 4G, S, and 5G denote ADS-B, IoT, Bluetooth, Wi-Fi, 4G, satellite, and 5G, respectively. Additionally, the abbreviations T and F are used to represent true and false conditions, respectively. In this way, B-T and B-F means Bluetooth signal is “available” and “not available”, respectively. According to the designed state machine of Figure 3, the drone flies from Region 1 where satellite, 4G, and Bluetooth are available, to Region 2 where only satellite and Wi-Fi are available. In the first region, the drone ER-ID will be connected to state 4: Bluetooth. Hence, the consumed energy will be only 56.7 mW instead of 258.1 mW or 283.1 mW if it was connected to 4G or satellite, respectively. When the drone enters the second region, since the Bluetooth signal is False, the state is transmitted as state 1: Off. Then, it will go to state 5 to be connected with Wi-Fi.
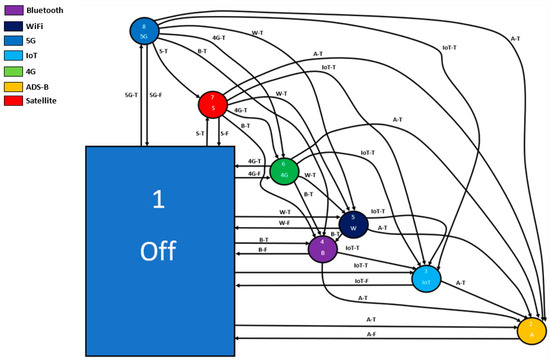
Figure 3.
The state transition diagram of the ER-ID of drone.
5. Case Study
In practice, we are surrounded by different mediums through which information and data can be transmitted and received. Such mediums include the use of Bluetooth, Wi-Fi, 5G, IoT, 4G, ADS-B, and satellite. In real life scenarios, a region may contain one or more means of information and data transmission. In this case study, several factors are taken into consideration, the non-uniform paths taken by the drone, the obtainable RF links available, the energy efficiency of the drone, and numerous other performance indices of the drone that enable it to achieve the set task. Figure 4 shows the case study of the path taken by the drone from starting point to end point via several RF mediums.
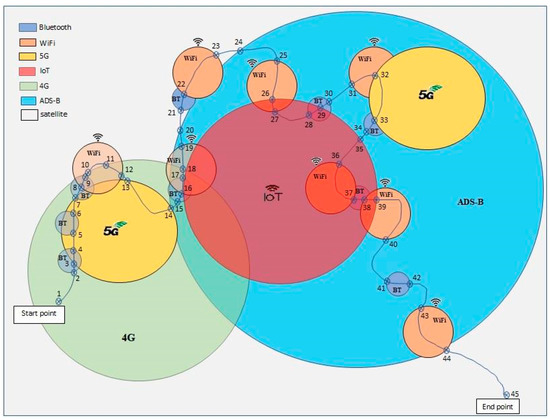
Figure 4.
Drone path scenario of case study.
The drone flies from the starting point in a region (point 1) on its path towards the end point with (point 45). The connection of the drone with the appropriate RF-CS is done according to our designed FSA algorithm of Figure 3 as explained below:
From point 1 to point 2: The only available RF-CSs are 4G and satellite. The drone will be in contact with 4G, which represents “state 6: 4G”. The consumed energy is 258.1 W.
From point 2 to point 3: The drone detected a new signal from Bluetooth. This will cause it to move to state 4: Bluetooth. The consumed energy is 56.7 mW.
From point 3 to point 4: The drone detected a new signal from 5G. The detection of this signal will not change the connection. Hence, the drone will stay in state 4: Bluetooth. It will maintain the consumed energy of 56.7 mW.
From point 4 to point 5: The drone loses the connection with Bluetooth. Hence, the available signals are now 4G, 5G, and satellite. This results in the drone transmitting at state 6: 4G. The consumed energy is 258.1 mW.
From point 5 to point 6: The drone detected a new signal from Bluetooth. This will cause it to move to state 4: Bluetooth. The consumed energy is 56.7 mW.
From point 6 to point 7: The drone loses the connection with Bluetooth. Hence, the available signals are now 4G, 5G, and satellite. This results in the drone transmitting at state 6: 4G. The consumed energy is 258.1 W.
From point 7 to point 8: The drone detected a new signal from Bluetooth and lost the signal from 5G. This will cause it to move to state 4: Bluetooth. The consumed energy is 56.7 mW.
From point 8 to point 9: The drone detected a new signal from Wi-Fi. Hence, the available signals are now 4G, satellite, Bluetooth and Wi-Fi. This will cause the drone to stay in state 4: Bluetooth. The consumed energy is 56.7 mW.
From point 9 to point 10: The drone loses the connection with Bluetooth. Hence, the available signals are now 4G, satellite, Wi-Fi. This results in the drone transmitting at state 5: Wi-Fi. The consumed energy is 58.1 mW.
From point 10 to point 11: The drone loses the connection with 4G. Hence, the available signals are now Wi-Fi and satellite. This results in the drone staying in state 5: Wi-Fi. The consumed energy is 58.1 mW.
From point 11 to point 12: The drone detected a new signal from 4G. Hence, the available signals are now Wi-Fi, satellite and 4G. The drone maintains transmitting at state 5: Wi-Fi. The consumed energy is 58.1 mW.
From point 12 to point 13: The drone loses the connection with Wi-Fi. Hence, the available signals are now 4G and satellite. This results in the drone transmitting at state 6: 4G. The consumed energy is 258.1 mW.
From point 13 to point 14: The drone detected a new signal from 5G. Hence, the available signals are now 4G, satellite and 5G. The drone continues transmitting at state 6: 4G. The consumed energy is 258.1 mW.
From point 14 to point 15: The drone detected a new signal from ADS-B and lost the signal from 5G. This results in the drone moving to state 2: ADS-B. The consumed energy is 0.1 mW.
From point 15 to point 16: The drone detected a new signal from Bluetooth. Hence, the available signals are now 4G, satellite, ABS-B, Wi-Fi and Bluetooth. This will cause the drone to maintain transmitting at state 2: ADS-B. The consumed energy is 0.1 mW
From point 16 to point 17: The drone detected a new signal from Wi-Fi. Hence, the available signals are now 4G, satellite, ADS-B, Bluetooth and Wi-Fi. This will cause the drone to stay in state 2: ADS-B. The consumed energy is 0.1 mW
From point 17 to point 18: The drone loses the connection with Bluetooth. Hence, the available signals are now 4G, satellite, ADS-B and Wi-Fi. This results in the drone transmitting at state 2: ABS-B. The consumed energy is 0.1 mW
From point 18 to point 19: The drone loses the connection with 4G. Hence, the available signals are now satellite, ABS-B, and Wi-Fi. This will cause the drone to maintain state 2: ADS-B. The consumed energy is 0.1 mW
From point 19 to point 20: The drone loses the connection with Wi-Fi. Hence, the available signals are now satellite and ADS-B. This will cause the drone to maintain state 2: ADS-B. The consumed energy is 0.1 mW
From point 20 to point 21: The only available RF-CS is the satellite. The drone will be in contact with a satellite, which represents state 7: satellite. The consumed energy is 283.1 mW.
From point 21 to point 22: The drone detected a new signal from Bluetooth. This will cause it to move to state 4: Bluetooth. The consumed energy is 56.7 mW.
From point 22 to point 23: The drone detected a new signal from Wi-Fi. Hence, the available signals are now satellite and Wi-Fi. This will cause the drone to move to state 5: Wi-Fi. The consumed energy is 58.1 mW.
From point 23 to point 24: The only available RF-CS is the satellite. The drone will thus be in state 7: satellite. The consumed energy is 283.1 mW.
From point 24 to point 25: The drone detected a new signal from ADS-B. This results in the drone moving to state 2: ADS-B. The consumed energy is 0.1 mW.
From point 25 to point 26: The drone detected a new signal from Wi-Fi. Hence, the available signals are now satellite, ADS-B and Wi-Fi. This will cause the drone to maintain transmitting at state 2: ADS-B. The consumed energy is 0.1 mW.
From point 26 to point 27: The drone detected another new signal from IoT. Hence, the available signals are now satellite, ADS-B, Wi-Fi and IoT. This will cause the drone to maintain its transmitting at state 2: ADS-B. The consumed energy is 0.1 mW.
From point 27 to point 28: The drone loses the connection with Wi-Fi Hence, the available signals are now satellite, ADS-B, and IoT. This will cause the drone to maintain its transmitting at state 2: ADS-B. The consumed energy is 0.1 mW.
From point 28 to point 29: The drone detected another new signal from Bluetooth. Hence, the available signals are now satellite, ADS-B, IoT and Bluetooth. This will cause the drone to maintain transmitting at state 2: ADS-B. The consumed energy is 0.1 mW.
From point 29 to point 30: The drone loses the connection with IoT. Hence, the available signals are now satellite, ADS-B, and Bluetooth. This will cause the drone to maintain transmitting at state 2: ADS-B. The consumed energy is 0.1 mW.
From point 30 to point 31: The drone further loses the connection with Bluetooth. Hence, the available signals are now satellite and ADS-B. This will cause the drone to maintain transmitting at state 2: ADS-B. The consumed energy is 0.1 mW.
From point 31 to point 32: The drone detected a new signal from Wi-Fi. Hence, the available signals are now satellite, ADS-B and Wi-Fi. This will cause the drone to maintain transmitting at state 2: ADS-B. The consumed energy is 0.1 mW.
From point 32 to point 33: The drone detected a new signal from 5G. Hence, the available signals are now satellite, ADS-B and 5G. The drone continues in state 2: ADS-B. The consumed energy is 0.1 mW.
From point 33 to point 34: The drone loses the connection with 5G and detects Bluetooth. Hence, the available signals are now satellite, ADS-B and Bluetooth. The drone stays in state 2: ABS-B. The consumed energy is 0.1 mW.
From point 34 to point 35: The drone loses the connection with Bluetooth. Hence, the available signals are now satellite and ADS-B. This will cause the drone to maintain transmitting at state 2: ADS-B. The consumed energy is 0.1 mW.
From point 35 to point 36: The drone detected another new signal from IoT. Hence, the available signals are now satellite, ADS-B and IoT. This will cause the drone to maintain transmitting at state 2: ADS-B. The consumed energy is 0.1 mW.
From point 36 to point 37: The drone detected a new signal from Wi-Fi. Hence, the available signals are now satellite, ADS-B, IoT and Wi-Fi. This will cause the drone to stick to state 2: ADS-B. The consumed energy is 0.1 mW.
From point 37 to point 38: The drone loses the connection with Wi-Fi and detected Bluetooth. Hence, the available signals are now satellite, ADS-B and Bluetooth. The drone stays in state 2: ABS-B. The consumed energy is 0.1 mW.
From point 38 to point 39: The drone further loses the connection with Bluetooth and detected Wi-Fi. Hence, the available signals are now satellite, ADS-B, IoT and Wi-Fi. The drone stays in state 2: ADS-B. The consumed energy is 0.1 mW.
From point 39 to point 40: the drone will move away from the region of IoT. Hence, the available signals are now satellite, ADS-B and Wi-Fi. This will cause the drone to maintain transmitting at state 2: ADS-B. The consumed energy is 0.1 mW.
From point 40 to point 41: The drone further loses the connection with Wi-Fi. Hence, the available signals are now satellite and ADS-B. This will cause the drone to maintain transmitting at state 2: ADS-B. The consumed energy is 0.1 mW.
From point 41 to point 42: The drone detected a new signal from Bluetooth. The detection of this signal will not change the connection. Hence, the drone will stay in state 2: ADS-B. It will maintain the consumed energy of 0.1 mW.
From point 42 to point 43: The drone moved away from the region with Bluetooth. This will not change its initial connection with ADS-B. Hence, the drone will stay in state 2: ADS-B. It will maintain the consumed energy of 0.1 mW.
From point 43 to point 44: The drone detected a new signal from Wi-Fi. Hence, the available signals are now satellite, ADS-B and Wi-Fi. Hence, the drone will stay in state 2: ADS-B. It will maintain the consumed energy of 0.1 mW.
From point 44 to point 45: The only available RF-CS at this stage is satellite. The drone will only be in contact with the satellite, and thus be in state 7: satellite. The consumed energy is 283.1 mW.
The results of this case study showed the advantages of the developed FSA algorithm in that it increases the range of detection on one hand, and reduces the consumed energy on the other. During the drone path scenario of this case study, the drone consumed only 2657.4681 mW. Furthermore, it showed the ability of drones to detect all types of the available RF-CS. Hence, the authorities can control the licensed drones by using available RF-CS devices, such as Bluetooth and Wi-Fi, which are already widely involved in mobile phones, as an example. Besides this, our suggested electronic ID would employ existing RF networks and solutions, such as GPRS (4G/5G), IoT networks that have been installed in smart cities, established satellite communications, and local ADS-B RF modem networks that have been deployed by the local aviation authority. Thus, the drones will be able to use these RF solutions in the same way that already-working RF systems have solved all electromagnetic issues, and select the available RF system that requires the least energy to utilize.
6. Conclusions and Future Work
Drones, up to now, are still missing a complete ER-ID system for identifying and locating themselves anytime and anywhere. The results of this study showed the ability of applying FSA for increasing the range of drone detection while reducing the consumed energy in their platforms. This increases flight security and decreases flight accidents. When aiming to maximize the ER-ID performance in terms of range, it was impossible to neglect the effect of consumed energy on the drone’s platform. The detection scenario is based on electronic identification against the potential combinations of all the available RF-CSs. These RF-CSs include Wi-Fi, Bluetooth, IoT, 4G/5G, ADS-B and satellite communications. The FSA manages the detection tasks such that it handles the connection within the appropriate RF-CS and establishes an RF communication between the drone and the local aviation authority to transmit the electronic remote identification. The FSA has the functionality to choose the best energy efficient RF communication system available, which helps in minimizing the consumed energy in drones. The problem of deterioration, due to fluctuation when more than one RF-CS signal is available in the same area, is solved by the developed FSA algorithm. In turn, the flight time of drones has been dramatically increased. As a future work, it is recommended to practically implement the developed FSA of this study. The results of this study also can be expanded to airplanes and civilian aircraft.
Author Contributions
Conceptualization, I.A.-D. and C.K.; methodology, G.T.; software, C.K.; validation, P.P., M.J.M. and P.D.; formal analysis, P.D., I.A.-D., P.P. and M.J.M.; investigation, C.K., I.A.-D. and G.T.; resources, P.D. and P.P.; data curation, M.J.M.; writing—original draft preparation, C.K., I.A.-D.; writing—review and editing, G.T. and I.A.-D.; visualization, C.K.; supervision, P.D. and P.P.; project administration, P.D. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding but the publication expenses were covered by MDPI.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Abdalla, A.S.; Marojevic, V. Communications Standards for Unmanned Aircraft Systems: The 3GPP Perspective and Research Drivers. IEEE Commun. Stand. Mag. 2021, 5, 70–77. [Google Scholar] [CrossRef]
- Hall, O.; Wahab, I. The Use of Drones in the Spatial Social Sciences. Drones 2021, 5, 112. [Google Scholar] [CrossRef]
- Alwateer, M.; Loke, S.W. Emerging Drone Services: Challenges and Societal Issues. Technol. Soc. Mag. IEEE 2020, 39, 47–51. [Google Scholar] [CrossRef]
- UAS Remote Identification Federal Aviation Administration. Available online: www.faa.gov/uas/getting_started/remote_id (accessed on 21 January 2023).
- Bassi, E. European Drones Regulation: Today’s Legal Challenges. In Proceedings of the IEEE International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 443–450. [Google Scholar] [CrossRef]
- Mobility and Transport. Keeping Drones Safe, Secure and Green: Commission Launches the European Network of U-space Demonstrators. Available online: Transport.ec.europa.eu/news/keeping-drones-safe-secure-and-green-commission-launches-european-network-u-space-demonstrators-2018-10-19_en (accessed on 21 January 2023).
- Tomaszewski, L.; Kołakowski, R.; Kukliński, S. Integration of U-space and 5GS for UAV services. In Proceedings of the 2020 IFIP Networking Conference (Networking), Paris, France, 22–26 June 2020; pp. 767–772. [Google Scholar]
- Zivilluftfahrt BAZL, Bundesamt für. Bundesamt Für Zivilluftfahrt (BAZL). Available online: www.bazl.admin.ch/bazl/de/home.html (accessed on 21 January 2023).
- Lieb; Volkert, A. Unmanned Aircraft Systems Traffic Management: A comparsion on the FAA UTM and the European CORUS ConOps based on U-space. In Proceedings of the IEEE AIAA/IEEE 39th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 11–15 October 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Boekholt, A. Switzerland Launches First Nationwide Network Remote Identification Service for Drones—SUSI. 18 August 2021. Available online: susi.swiss/2021/08/18/switzerland-launches-first-nationwide-network-remote-identification-service-for-drones (accessed on 21 January 2023).
- Rokhsaritalemi, S.; Sadeghi-Niaraki, A.; Choi, S. Drone Trajectory Planning Based on Geographic Information System for 3D Urban Modeling. In Proceedings of the IEEE International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Republic of Korea, 17–19 October 2018; pp. 1080–1083. [Google Scholar] [CrossRef]
- Network Remote Identification Service—SUSI. Available online: susi.swiss/network-remote-identification-service (accessed on 21 January 2023).
- Sellali, B.B.M.; Allali, A. Neuro—Fuzzy methods coupled to operational PID, to improve the flight parameters of a drone. In Proceedings of the IEEE 18th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), Monastir, Tunisia, 21–23 December 2017; pp. 314–319. [Google Scholar] [CrossRef]
- Tedeschi, P.; Sciancalepore, S.; Di Pietro, R. ARID: Anonymous Remote IDentification of Unmanned Aerial Vehicles. In Proceedings of the Annual Computer Security Applications Conference, Online, 6–10 December 2021. [Google Scholar]
- Ezuma, M.; Erden, F.; Anjinappa, C.K.; Ozdemir, O.; Guvenc, I.; Matolak, D. UAV Detection and Identification. In UAV Communications for 5G and Beyond, Wiley-IEEE Press; Zeng, Y., Guvenc, I., Zhang, R., Geraci, G., Matolak, D.W., Eds.; 2020; Available online: https://onlinelibrary.wiley.com/doi/10.1002/9781119575795.ch3 (accessed on 21 November 2022).
- Kadil, V.V.; Adane, D.S. Maximizing range of signal strength by homemade Wi-Fi booster antenna. In Proceedings of the 2012 World Congress on Information and Communication Technologies, Trivandrum, India, 30 October–2 November 2012. [Google Scholar]
- Qi, W.; Zhen, J. Fusion positioning based on WiFi and Bluetooth for the area around the corner of stairs. In Proceedings of the IEEE 18th International Conference on Mobile Ad Hoc and Smart Systems (MASS), Denver, CO, USA, 4–7 October 2021; pp. 162–163. [Google Scholar] [CrossRef]
- Preetha, K.G. A Novel Solution to the Short Range Bluetooth Communication. arXiv 2011, arXiv:1111.2097. [Google Scholar]
- Bharath, S. IoT Based Smart Switch with Bluetooth Speaker Using MQTT Protocol: Node-red Framework. In Proceedings of the IEEE 2nd International Conference on Advances in Computing, Communication, Embedded and Secure Systems (ACCESS), Ernakulam, India, 2–4 September 2021; pp. 61–64. [Google Scholar] [CrossRef]
- Vyas, S.; Chaudhari, U.; Nandini, V.C.; Thakare, B. State of the Art Literature Survey 2015 on Bluetooth. Int. J. Comput. Appl. 2015, 131, 7–10. [Google Scholar] [CrossRef]
- Shan, G.; Roh, B.-H. Maximized Effective Transmission Rate Model for Advanced Neighbor Discovery Process in Bluetooth Low Energy 5.0. IEEE Internet Things J. 2022, 9, 16272–16283. [Google Scholar] [CrossRef]
- Available online: https://airccse.org/journal/ijcseit/papers/0811ijcseit06.pdf (accessed on 21 January 2023).
- Fourty, N.; Val, T.; Fraisse, P.; Mercier, J.J. Comparative analysis of new high data rate wireless communication technologies “From Wi-Fi to WiMAX. In Proceedings of the IEEE Joint International Conference on Autonomic and Autonomous Systems and International Conference on Networking and Services—(icas-isns’05), Papeete, France, 23–28 October 2005; p. 66. [Google Scholar] [CrossRef]
- Al-Alawi, A.I. WiFi Technology: Future Market Challenges and Opportunities. J. Comput. Sci. 2006, 2, 13–18. [Google Scholar] [CrossRef]
- Abdelgader, A.M.S.; Wu, L. Official IEEE 802.11 Working group project timelines—21 April 2022. In Proceedings of the World Congress on Engineering and Computer Science, San Francisco, CA, USA, 22–24 October 2014; Volume 2, pp. 1–8. [Google Scholar]
- Salkinzis, A.K.; Chamzas, C. Mobile packet data technology: An insight into MOBITEX architecture. IEEE Pers. Commun. 1997, 4, 10–18. [Google Scholar] [CrossRef]
- Rumney, M. Looking Towards 4G: LTE-Advanced. In LTE and the Evolution to 4G Wireless-Design and Measurement Challenges; Wiley: Hoboken, NJ, USA, 2013; pp. 567–600. [Google Scholar] [CrossRef]
- Yu, C.; Chen, S.; Wang, F.; Wei, Z. Improving 4G/5G air interface security: A survey of existing attacks on different LTE layers. Comput. Netw. 2021, 201, 108532. [Google Scholar] [CrossRef]
- Ghosh, A.; Maeder, A.; Baker, M.; Chandramouli, D. 5G Evolution: A View on 5G Cellular Technology Beyond 3GPP Release 15. IEEE Access 2019, 7, 127639–127651. [Google Scholar] [CrossRef]
- Hao, Y. Investigation and Technological Comparison of 4G and 5G Networks. J. Comput. Commun. 2021, 9, 36–43. [Google Scholar] [CrossRef]
- Elayoubi, S.E.; Fallgren, M.; Spapis, P.; Zimmermann, G.; Martín-Sacristán, D.; Yang, C.; Jeux, S.; Agyapong, P.; Campoy, L.; Singh, S.; et al. 5G service requirements and operational use cases: Analysis and METIS II vision. In Proceedings of the IEEE European Conference on Networks and Communications (EuCNC), Athens, Greece, 27–30 June 2016; pp. 158–162. [Google Scholar] [CrossRef]
- Dangi, R.; Lalwani, P.; Choudhary, G.; You, I.; Pau, G. Study and Investigation on 5G Technology: A Systematic Review. Sensors 2022, 22, 26. [Google Scholar] [CrossRef]
- Hiramoto, T.; Takeuchi, K.; Mizutani, T.; Ueda, A.; Saraya, T.; Kobayashi, M.; Yamamoto, Y.; Makiyama, H.; Yamashita, T.; Oda, H.; et al. Ultra-low power and ultra-low voltage devices and circuits for IoT applications. In Proceedings of the IEEE Silicon Nanoelectronics Workshop (SNW), Honolulu, HI, USA, 12–13 June 2016; pp. 146–147. [Google Scholar] [CrossRef]
- Ghubaish, A.; Salman, T.; Jain, R. Experiments with a LoRaWAN-Based Remote ID System for Locating Unmanned Aerial Vehicles (UAVs). Wirel. Commun. Mob. Comput. 2019, 2019, 9060121. [Google Scholar] [CrossRef]
- Senadeera, S.D.A.P.; Kyi, S.; Sirisung, T.; Pongsupan, W.; Taparugssanagorn, A.; Dailey, M.N.; Wai, T.A. Cost-Effective and Low Power IoT-Based Paper Supply Monitoring System: An Application Modeling Approach. J. Low Power Electron. Appl. 2021, 11, 46. [Google Scholar] [CrossRef]
- Henkel, J.; Pagani, S.; Amrouch, H.; Bauer, L.; Samie, F. Ultra-low power and dependability for IoT devices (Invited paper for IoT technologies). In Proceedings of the Design, Automation & Test in Europe Conference & Exhibition (DATE), Lausanne, Switzerland, 27–31 March 2017; pp. 954–959. [Google Scholar] [CrossRef]
- Noreen, U.; Bounceur, A.; Clavier, L. A study of LoRa low power and wide area network technology. In Proceedings of the 2017 International Conference on Advanced Technologies for Signal and Image Processing (ATSIP), Fez, Morocco, 22–24 May 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Yuta, M.; Zhang, H.; Shin, K.; Hajime, N. High-Precision/Throughput Growth Measurement of Crops by Drone with Stereo Matching Based on RTK-GNSS and Single Camera. In Proceedings of the IEEE 9th Global Conference on Consumer Electronics (GCCE), Kobe, Japan, 13–16 October 2020; pp. 936–939. [Google Scholar] [CrossRef]
- Al-Darraji, I.; Derbali, M.; Jerbi, H.; Khan, F.Q.; Jan, S.; Piromalis, D.; Tsaramirsis, G. A technical framework for selection of autonomous uav navigation technologies and sensors. Comput. Mater. Contin. 2021, 68, 2771–2790. [Google Scholar] [CrossRef]
- Rupar, M.A. Airborne Beyond Line-of-Sight Communication Networks. IEEE Commun. Mag. 2020, 58, 34–39. [Google Scholar] [CrossRef]
- Hosseini, N.; Jamal, H.; Haque, J.; Magesacher, T.; Matolak, D.W. UAV Command and Control, Navigation and Surveillance: A Review of Potential 5G and Satellite Systems. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–10. [Google Scholar] [CrossRef]
- Tao, Z.; Xiaoming, T. High-accuracy radar calibration based on ADS-B. In Proceedings of the IET International Radar Conference 2015, Hangzhou, China, 14–16 October 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Wu, Z.; Shang, T.; Guo, A. Security Issues in Automatic Dependent Surveillance—Broadcast (ADS-B): A Survey. IEEE Access 2020, 8, 122147–122167. [Google Scholar] [CrossRef]
- DJI Official. Available online: www.dji.com/flysafe/airsense (accessed on 21 January 2023).
- Dy, L.R.I.; Borgen, K.B.; Mott, J.H.; Sharma, C.; Marshall, Z.A.; Kusz, M.S. Validation of ADS-B Aircraft Flight Path Data Using Onboard Digital Avionics Information. In Proceedings of the IEEE Systems and Information Engineering Design Symposium (SIEDS), Charlottesville, VA, USA, 29–30 April 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Automatic Dependent Surveillance—Broadcast (ADS-B)|Federal Aviation Administration. Available online: www.faa.gov/about/office_org/headquarters_offices/avs/offices/afx/afs/afs400/afs410/ads-b (accessed on 21 January 2023).
- Saputro, J.A.; Hartadi, E.E.; Syahral, M. Implementation of GPS Attacks on DJI Phantom 3 Standard Drone as a Security Vulnerability Test. In Proceedings of the IEEE 1st International Conference on Information Technology, Advanced Mechanical and Electrical Engineering (ICITAMEE), Yogyakarta, Indonesia, 13–14 October 2020; pp. 95–100. [Google Scholar] [CrossRef]
- French, S. Mavic Air 2 ADS-B Is the New Drone Feature Every Should Be Talking About. The Drone Girl. 28 April 2020. Available online: www.thedronegirl.com/2020/04/28/mavic-air-2-ads-b (accessed on 21 January 2023).
- Arbuckle, P.D. U.S. activities in ADS-B systems implementation. In Proceedings of the IEEE Tyrrhenian International Workshop on Digital Communications—Enhanced Surveillance of Aircraft and Vehicles, Capri, Italy, 12–14 September 2011; pp. 41–46. [Google Scholar]
- Equip ADS-B|Federal Aviation Administration. Available online: https://www.faa.gov/nextgen/equipadsb/research/airspace/ (accessed on 21 January 2023).
- Swinney, C.J.; Woods, J.C. RF Detection and Classification of Unmanned Aerial Vehicles in Environments with Wireless Interference. In Proceedings of the IEEE International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; pp. 1494–1498. [Google Scholar] [CrossRef]
- Um, J.-S. Drones as Cyber-Physical Systems Concepts and Applications for the Fourth Industrial Revolution; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- ADS-B Technology|Drone Tracking Transponders|ADS-B Receivers. Unmanned Systems Technology, 20 January 2023. Available online: www.unmannedsystemstechnology.com/company/aerobits (accessed on 21 January 2023).
- Casals, L.; Mir, B.; Vidal, R.; Gomez, C. Modeling the Energy Performance of LoRaWAN. Sensors 2017, 17, 2364. [Google Scholar] [CrossRef]
- What Is LoRaWAN&Reg; Specification—LoRa Alliance®. LoRa Alliance®. Available online: hz1.37b.myftpupload.com/about-lorawan (accessed on 21 January 2023).
- LoRa and LoRaWAN: Technical Overview|DEVELOPER PORTAL. Available online: Documentation/tech-papers-and-guides/lora-and-lorawan (accessed on 21 January 2023).
- Understanding Bluetooth Range|Bluetooth® Technology Website. Available online: www.bluetooth.com/learn-about-bluetooth/key-attributes/range (accessed on 21 January 2023).
- Tsira, V.; Nandi, G. Bluetooth Technology: Security Issues and Its Prevention. Int. J. Comput. Technol. Appl. 2014, 5, 1833. [Google Scholar]
- What Is the Range of a Typical Wi-Fi Network? Lifewire, 5 November 2020. Available online: www.lifewire.com/range-of-typical-wifi-network-816564 (accessed on 21 January 2023).
- Bhatia, R. Introduction & Features of 4G: A Review. Int. J. Eng. Res. Technol. (IJERT) 2015, 1–3. [Google Scholar] [CrossRef]
- Zou, L.; Javed, A.; Muntean, G.-M. Smart mobile device power consumption measurement for video streaming in wireless environments: WiFi vs. LTE. In Proceedings of the 2017 IEEE International symposium on broadband multimedia systems and broadcasting (BMSB), Cagliari, Italy, 7–9 June 2017; pp. 1–6. [Google Scholar] [CrossRef]
- A/S, Satlab. SRS-3 Full-Duplex S-Band Transceiver. Available online: www.satlab.com/products/srs-3 (accessed on 21 January 2023).
- 5G Speed Vs 5G range-What Is the Value of 5G Speed, 5G Range. Available online: www.rfwireless-world.com/Terminology/5G-Speed-Vs-5G-Range.html (accessed on 21 January 2023).
- Iridium 9603 Module. Iridium Satellite Communications. 29 July 2021. Available online: www.iridium.com/products/iridium-9603 (accessed on 21 January 2023).
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).