
Time-Frequency Feature-Based Seismic Response Prediction Neural Network Model for Building Structures


Abstract
:1. Introduction
2. Proposed Seismic Damage Prediction Model for a Building Structure
2.1. Generation Data Labels
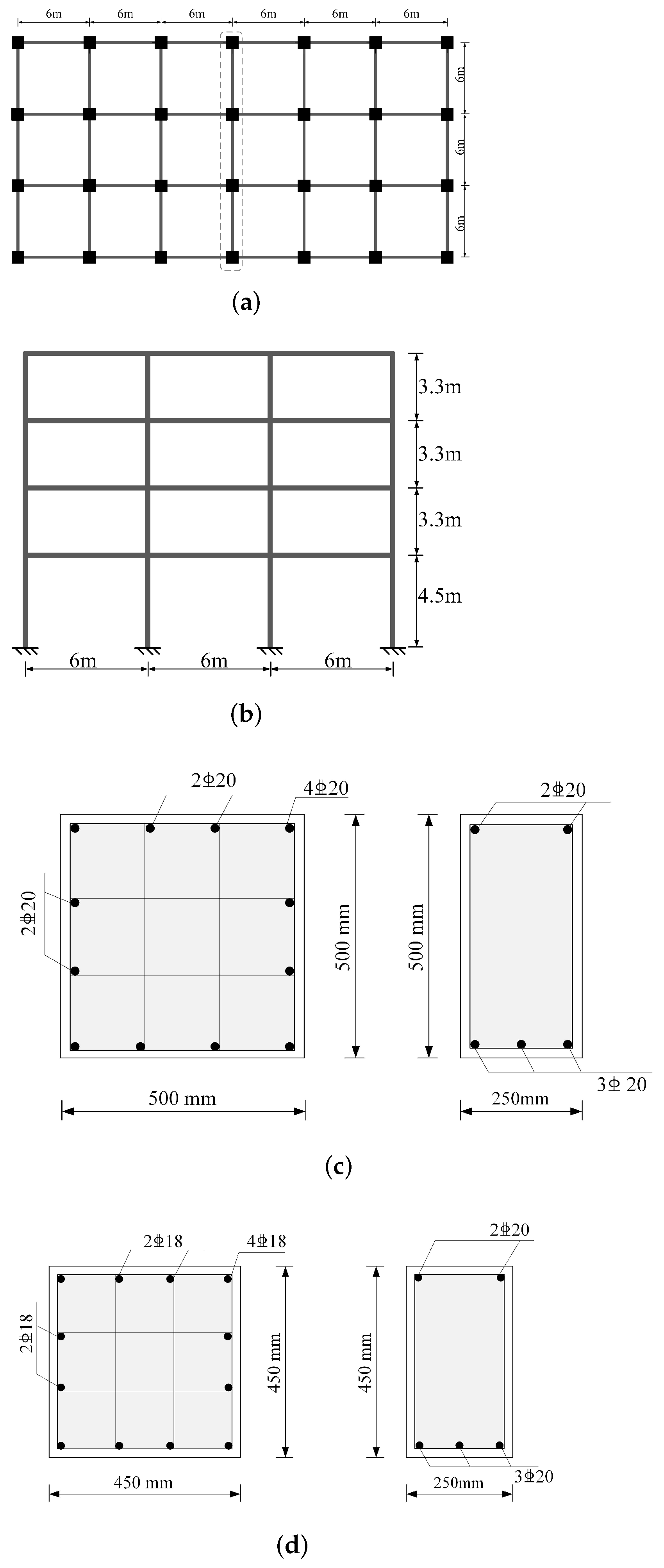
2.1.1. Dynamic Response Analysis Model for the Target Structure
2.1.2. Definition of Structural Damage State
2.2. Ground Motion Dataset
2.2.1. Training Set (Validation Set)
2.2.2. Testing Set
2.3. Neural Network Configurations
2.3.1. Model
2.3.2. Model
2.3.3. Model
2.3.4. Model
2.4. Calculation Platform and Network Training Setup
3. Analysis and Discussion
3.1. Study on GRU Parameter Settings
3.1.1. Network Structure
3.1.2. Sensitivity Studies on the Hyperparameters
3.1.2.1. Dropout Ratio
3.1.2.2. Learning Rate
3.2. Analysis of Time-Frequency Characteristic Parameters
3.2.1. Influence of Signal Length, Frame Length and Frame Shift
3.2.2. Influence of Inverse Spectrum Boosting and Pre-Emphasis
3.2.3. Influence of Temporal First and Second Derivatives
3.2.4. Other
3.3. Analysis of AFEM Setting
3.3.1. Method of Weight Constraint
3.3.2. Norm-2
3.3.3. Different Weight Initialization
- 1
- Liner warping. After reaching the peak, it linearly decreases in a triangular fashion like Mel-warping. However, unlike Mel-warping, the spacing between the points corresponding to the peak is equal.
- 2
- Gaussian warping. It is created by applying a one-dimensional Gaussian kernel function to Mel-warping (Equation (1)). It peaks at the same time as Mel-warping. However, unlike Mel-warping, it gradually decreases in a Gaussian fashion rather than a triangular fashion.where means the sample mean and is the sample variance.
- 3
- Barr warping. A non-linear transformation describing the human ear’s perception of frequencies in terms of psychoacoustic scales, and the equidistance corresponds to a frequency scale of equal distance on perception. Here, the following equation transforms the frequency f to the bark scale.
- 4
- Equivalent rectangular bandwidth scale (ERB). It simulates the perception of sound from the human ear using a rectangular frequency bandpass filter or a bandstop filter for psychoacoustic measurements. Here, the following equation calculates the f conversion to the ERB scale.
- 5
- GammaTone warping. Similar to Mel-warping, an audio signal is discriminated by simulating the response of the human ear cochlea to frequencies. Here, the following frequency expression is used to calculate this.where c is the proportionality constant, n is the filter order, and b is the time decay coefficient. and (radian) are the frequency and phase of the carrier wave, respectively.
3.3.4. Others
3.4. Study on the Model
3.5. Study on the Model
3.6. Prediction on Testing Dataset
4. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Coburn, A.; Spence, R. Earthquake Protection; John Wiley & Sons: Hoboken, NJ, USA, 2003. [Google Scholar]
- Asgarieh, E.; Moaveni, B.; Stavridis, A. Nonlinear finite element model updating of an infilled frame based on identified time-varying modal parameters during an earthquake. J. Sound Vib. 2014, 333, 6057–6073. [Google Scholar] [CrossRef]
- Oh, B.K.; Kim, M.S.; Kim, Y.; Cho, T.; Park, H.S. Model updating technique based on modal participation factors for beam structures. Comput.-Aided Civ. Infrastruct. Eng. 2015, 30, 733–747. [Google Scholar] [CrossRef]
- Kouris, L.A.S.; Penna, A.; Magenes, G. Seismic damage diagnosis of a masonry building using short-term damping measurements. J. Sound Vib. 2017, 394, 366–391. [Google Scholar] [CrossRef]
- Park, H.S.; Oh, B.K. Damage detection of building structures under ambient excitation through the analysis of the relationship between the modal participation ratio and story stiffness. J. Sound Vib. 2018, 418, 122–143. [Google Scholar] [CrossRef]
- Hancilar, U.; Tuzun, C.; Yenidogan, C.; Erdik, M. ELER software—A new tool for urban earthquake loss assessment. Nat. Hazards Earth Syst. Sci. 2010, 10, 2677–2696. [Google Scholar] [CrossRef] [Green Version]
- Wald, D.; Jaiswal, K.; Marano, K.; Bausch, D.; Hearne, M. PAGER—Rapid Assessment of an Earthquakes Impact; Technical Report; US Geological Survey: Reston, VA, USA, 2010.
- Gehl, P.; Seyedi, D.M.; Douglas, J. Vector-valued fragility functions for seismic risk evaluation. Bull. Earthq. Eng. 2013, 11, 365–384. [Google Scholar] [CrossRef] [Green Version]
- Lu, X.; Guan, H. Earthquake Disaster Simulation of Civil Infrastructures; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Xiong, C.; Lu, X.; Huang, J.; Guan, H. Multi-LOD seismic-damage simulation of urban buildings and case study in Beijing CBD. Bull. Earthq. Eng. 2019, 17, 2037–2057. [Google Scholar] [CrossRef]
- Lu, X.; McKenna, F.; Cheng, Q.; Xu, Z.; Zeng, X.; Mahin, S.A. An open-source framework for regional earthquake loss estimation using the city-scale nonlinear time history analysis. Earthq. Spectra 2020, 36, 806–831. [Google Scholar] [CrossRef]
- Abdeljaber, O.; Avci, O.; Kiranyaz, S.; Gabbouj, M.; Inman, D.J. Real-time vibration-based structural damage detection using one-dimensional convolutional neural networks. J. Sound Vib. 2017, 388, 154–170. [Google Scholar] [CrossRef]
- Thai, H.T. Machine learning for structural engineering: A state-of-the-art review. In Proceedings of the Structures; Elsevier: Amsterdam, The Netherlands, 2022; Volume 38, pp. 448–491. [Google Scholar]
- de Lautour, O.R.; Omenzetter, P. Damage classification and estimation in experimental structures using time series analysis and pattern recognition. Mech. Syst. Signal Process. 2010, 24, 1556–1569. [Google Scholar] [CrossRef] [Green Version]
- Kumar, N.; Narayan Das, N.; Gupta, D.; Gupta, K.; Bindra, J. Efficient automated disease diagnosis using machine learning models. J. Healthc. Eng. 2021, 2021, 9983652. [Google Scholar] [CrossRef]
- Huang, C.S.; Hung, S.L.; Wen, C.; Tu, T. A neural network approach for structural identification and diagnosis of a building from seismic response data. Earthq. Eng. Struct. Dyn. 2003, 32, 187–206. [Google Scholar] [CrossRef]
- Sahoo, D.M.; Chakraverty, S. Functional link neural network learning for response prediction of tall shear buildings with respect to earthquake data. IEEE Trans. Syst. Man, Cybern. Syst. 2017, 48, 1–10. [Google Scholar] [CrossRef]
- Xu, Y.; Lu, X.; Cetiner, B.; Taciroglu, E. Real-time regional seismic damage assessment framework based on long short-term memory neural network. Comput.-Aided Civ. Infrastruct. Eng. 2021, 36, 504–521. [Google Scholar] [CrossRef]
- De Lautour, O.R.; Omenzetter, P. Prediction of seismic-induced structural damage using artificial neural networks. Eng. Struct. 2009, 31, 600–606. [Google Scholar] [CrossRef] [Green Version]
- Morfidis, K.; Kostinakis, K. Seismic parameters’ combinations for the optimum prediction of the damage state of R/C buildings using neural networks. Adv. Eng. Softw. 2017, 106, 1–16. [Google Scholar] [CrossRef]
- Kostinakis, K.; Athanatopoulou, A.; Morfidis, K. Correlation between ground motion intensity measures and seismic damage of 3D R/C buildings. Eng. Struct. 2015, 82, 151–167. [Google Scholar] [CrossRef]
- Oh, B.K.; Glisic, B.; Park, S.W.; Park, H.S. Neural network-based seismic response prediction model for building structures using artificial earthquakes. J. Sound Vib. 2020, 468, 115109. [Google Scholar] [CrossRef]
- Morales-Beltran, M.; Paul, J. Active and semi-active strategies to control building structures under large earthquake motion. J. Earthq. Eng. 2015, 19, 1086–1111. [Google Scholar] [CrossRef]
- Fujii, K. Prediction of the largest peak nonlinear seismic response of asymmetric buildings under bi-directional excitation using pushover analyses. Bull. Earthq. Eng. 2014, 12, 909–938. [Google Scholar] [CrossRef]
- Mei, G.; Kareem, A.; Kantor, J.C. Real-time model predictive control of structures under earthquakes. Earthq. Eng. Struct. Dyn. 2001, 30, 995–1019. [Google Scholar] [CrossRef]
- Yamada, K.; Kobori, T. Linear quadratic regulator for structure under on-line predicted future seismic excitation. Earthq. Eng. Struct. Dyn. 1996, 25, 631–644. [Google Scholar] [CrossRef]
- Gupta, M.; Kumar, N.; Singh, B.K.; Gupta, N. NSGA-III-Based deep-learning model for biomedical search engines. Math. Probl. Eng. 2021, 2021, 9935862. [Google Scholar] [CrossRef]
- Hashmi, A.; Juneja, A.; Kumar, N.; Gupta, D.; Turabieh, H.; Dhingra, G.; Jha, R.S.; Bitsue, Z.K. Contrast Enhancement in Mammograms Using Convolution Neural Networks for Edge Computing Systems. Sci. Program. 2022, 2022, 1882464. [Google Scholar] [CrossRef]
- Park, H.O.; Dibazar, A.A.; Berger, T.W. Discrete Synapse Recurrent Neural Network for nonlinear system modeling and its application on seismic signal classification. In Proceedings of the the 2010 International Joint Conference on Neural Networks (IJCNN), Barcelona, Spain, 18–23 July 2010; IEEE: New York, NY, USA, 2010; pp. 1–7. [Google Scholar]
- Kuyuk, H.S.; Susumu, O. Real-time classification of earthquake using deep learning. Procedia Comput. Sci. 2018, 140, 298–305. [Google Scholar] [CrossRef]
- Panakkat, A.; Adeli, H. Recurrent neural network for approximate earthquake time and location prediction using multiple seismicity indicators. Comput.-Aided Civ. Infrastruct. Eng. 2009, 24, 280–292. [Google Scholar] [CrossRef]
- Vardaan, K.; Bhandarkar, T.; Satish, N.; Sridhar, S.; Sivakumar, R.; Ghosh, S. Earthquake trend prediction using long short-term memory RNN. Int. J. Electr. Comput. Eng. 2019, 9, 1304–1312. [Google Scholar]
- Zhang, R.; Chen, Z.; Chen, S.; Zheng, J.; Büyüköztürk, O.; Sun, H. Deep long short-term memory networks for nonlinear structural seismic response prediction. Comput. Struct. 2019, 220, 55–68. [Google Scholar] [CrossRef]
- Perez-Ramirez, C.A.; Amezquita-Sanchez, J.P.; Valtierra-Rodriguez, M.; Adeli, H.; Dominguez-Gonzalez, A.; Romero-Troncoso, R.J. Recurrent neural network model with Bayesian training and mutual information for response prediction of large buildings. Eng. Struct. 2019, 178, 603–615. [Google Scholar] [CrossRef]
- Wang, T.; Li, H.; Noori, M.; Ghiasi, R.; Kuok, S.C.; Altabey, W.A. Probabilistic Seismic Response Prediction of Three-Dimensional Structures Based on Bayesian Convolutional Neural Network. Sensors 2022, 22, 3775. [Google Scholar] [CrossRef]
- Taheri, A.; Makarian, E.; Manaman, N.S.; Ju, H.; Kim, T.H.; Geem, Z.W.; RahimiZadeh, K. A Fully-Self-Adaptive Harmony Search GMDH-Type Neural Network Algorithm to Estimate Shear-Wave Velocity in Porous Media. Appl. Sci. 2022, 12, 6339. [Google Scholar] [CrossRef]
- Chowdhary, K. Fundamentals of Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Lu, X.; Xu, Y.; Tian, Y.; Cetiner, B.; Taciroglu, E. A deep learning approach to rapid regional post-event seismic damage assessment using time-frequency distributions of ground motions. Earthq. Eng. Struct. Dyn. 2021, 50, 1612–1627. [Google Scholar] [CrossRef]
- Lu, X.; Liao, W.; Huang, W.; Xu, Y.; Chen, X. An improved linear quadratic regulator control method through convolutional neural network–based vibration identification. J. Vib. Control. 2021, 27, 839–853. [Google Scholar] [CrossRef]
- Liao, W.; Chen, X.; Lu, X.; Huang, Y.; Tian, Y. Deep transfer learning and time-frequency characteristics-based identification method for structural seismic response. Front. Built Environ. 2021, 7, 10. [Google Scholar] [CrossRef]
- Cheng, Z.; Liao, W.; Chen, X.; LU, X.z. A vibration recognition method based on deep learning and signal processing. Eng. Mech. 2021, 38, 230–246. [Google Scholar]
- GB50009-2012; Load Code for the Design of Building Structures. Ministry of Housing and Urban-Rural Development of the P.R. China: Beijing, China, 2012.
- GB50009-2012; Code for Design of Concrete Structures. Ministry of Housing and Urban-Rural Development of the P.R. China: Beijing, China, 2012.
- GB50009-2012; Code for Seismic Design of Buildings. Ministry of Housing and Urban-Rural Development of the P.R. China:: Beijing, China, 2010.
- McKenna, F.; Fenves, G.; Filippou, F.; Mazzoni, S.; Scott, M.; Elgamal, A.; Yang, Z.; Lu, J.; Arduino, P.; McKenzie, P. OpenSees; University of California: Berkeley, CA, USA, 2010. [Google Scholar]
- Li, Y.; Fu, Z.; Tan, P.; Shang, J.; Mi, P. Life cycle resilience assessment of RC frame structures considering multiple-hazard. In Proceedings of the Structures; Elsevier: Amsterdam, The Netherlands, 2022; Volume 44, pp. 1844–1862. [Google Scholar]
- Tirca, L.; Serban, O.; Lin, L.; Wang, M.; Lin, N. Improving the seismic resilience of existing braced-frame office buildings. J. Struct. Eng. 2016, 142, C4015003. [Google Scholar] [CrossRef]
- GB/T 24335-2009; Classification of Earthquake Damage to Buildings and Special Structures. Standards Press of China: Beijing, China, 2009.
- Federal Emergency Management Agency (FEMA). Multi-Hazard Loss Estimation Methodology: Earthquake Model (HAZUS-MH 2.1 Technical Manual); Federal Emergency Management Agency: Washington, DC, USA, 2012.
- Federal Emergency Management Agency. Seismic Performance Assessment of Buildings Volume 1-Methodology; Federal Emergency Management Agency: Washington, DC, USA, 2018.
- Goulet, C.A.; Kishida, T.; Ancheta, T.D.; Cramer, C.H.; Darragh, R.B.; Silva, W.J.; Hashash, Y.M.; Harmon, J.; Parker, G.A.; Stewart, J.P.; et al. PEER NGA-east database. Earthq. Spectra 2021, 37, 1331–1353. [Google Scholar] [CrossRef]
- Zhu, C.; Weatherill, G.; Cotton, F.; Pilz, M.; Kwak, D.Y.; Kawase, H. An open-source site database of strong-motion stations in Japan: K-NET and KiK-net (v1. 0.0). Earthq. Spectra 2021, 37, 2126–2149. [Google Scholar] [CrossRef]
- NIED. Seismograph Station Information of the NIED Hi-Net and F-Net; NIED: Okahandja, Namibia, 2019. [Google Scholar]
- Mousavi, S.M.; Sheng, Y.; Zhu, W.; Beroza, G.C. STanford EArthquake Dataset (STEAD): A global data set of seismic signals for AI. IEEE Access 2019, 7, 179464–179476. [Google Scholar] [CrossRef]
- Graves, R.; Jordan, T.H.; Callaghan, S.; Deelman, E.; Field, E.; Juve, G.; Kesselman, C.; Maechling, P.; Mehta, G.; Milner, K.; et al. CyberShake: A physics-based seismic hazard model for southern California. Pure Appl. Geophys. 2011, 168, 367–381. [Google Scholar] [CrossRef]
- Blackledge, J.M. Digital Signal Processing: Mathematical and Computational Methods, Software Development and Applications; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Mai, P.; Dalguer, L. Physics-Based Broadband Ground-Motion Simulations: Rupture Dynamics Combined with Seismic Scattering and Numerical Simulations in a Heterogeneous Earth Crust; 15 WCEE: Lisboa, Portugal, 2012. [Google Scholar]
- Mermelstein, P. Distance measures for speech recognition, psychological and instrumental. Pattern Recognit. Artif. Intell. 1976, 116, 374–388. [Google Scholar]
- Davis, S.; Mermelstein, P. Comparison of parametric representations for monosyllabic word recognition in continuously spoken sentences. IEEE Trans. Acoust. Speech Signal Process. 1980, 28, 357–366. [Google Scholar] [CrossRef] [Green Version]
- Dev, A.; Bansal, P. Robust features for noisy speech recognition using mfcc computation from magnitude spectrum of higher order autocorrelation coefficients. Int. J. Comput. Appl. 2010, 10, 36–38. [Google Scholar] [CrossRef]
- Mohamed, A.R. Deep Neural Network Acoustic Models for ASR. Ph.D. Thesis, University of Toronto, Toronto, ON, Canada, 2014. [Google Scholar]
- Cho, K.; Van Merriënboer, B.; Gulcehre, C.; Bahdanau, D.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning phrase representations using RNN encoder-decoder for statistical machine translation. arXiv 2014, arXiv:1406.1078. [Google Scholar]
- Chung, J.; Gulcehre, C.; Cho, K.; Bengio, Y. Empirical evaluation of gated recurrent neural networks on sequence modeling. arXiv 2014, arXiv:1412.3555. [Google Scholar]
- Sainath, T.; Weiss, R.J.; Wilson, K.; Senior, A.W.; Vinyals, O. Learning the Speech Front-End with Raw Waveform CLDNNs. 2015. Available online: https://storage.googleapis.com/pub-tools-public-publication-data/pdf/43960.pdf (accessed on 20 October 2022).
- Sainath, T.N.; Vinyals, O.; Senior, A.; Sak, H. Convolutional, long short-term memory, fully connected deep neural networks. In Proceedings of the 2015 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), South Brisbane, QL, Australia, 19–24 April 2015; IEEE: New York, NY, USA, 2015; pp. 4580–4584. [Google Scholar]
- Sainath, T.N.; Senior, A.W.; Vinyals, O.; Sak, H. Convolutional, Long Short-Term Memory, Fully Connected Deep Neural Networks. U.S. Patent 10,783,900, 22 September 2020. [Google Scholar]
- Lee-Thorp, J.; Ainslie, J.; Eckstein, I.; Ontanon, S. Fnet: Mixing tokens with fourier transforms. arXiv 2021, arXiv:2105.03824. [Google Scholar]
- Sainath, T.N.; Kingsbury, B.; Mohamed, A.r.; Saon, G.; Ramabhadran, B. Improvements to filterbank and delta learning within a deep neural network framework. In Proceedings of the 2014 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Florence, Italy, 4–9 May 2014; IEEE: New York, NY, USA, 2014; pp. 6839–6843. [Google Scholar]
- Ghahremani, P.; Hadian, H.; Lv, H.; Povey, D.; Khudanpur, S. Acoustic Modeling from Frequency Domain Representations of Speech. In Proceedings of the Interspeech, Hyderabad, India, 2–6 September 2018; pp. 1596–1600. [Google Scholar]
- Tamkin, A.; Jurafsky, D.; Goodman, N. Language through a prism: A spectral approach for multiscale language representations. Adv. Neural Inf. Process. Syst. 2020, 33, 5492–5504. [Google Scholar]
- Abdel-Hamid, O.; Mohamed, A.r.; Jiang, H.; Penn, G. Applying convolutional neural networks concepts to hybrid NN-HMM model for speech recognition. In Proceedings of the 2012 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Kyoto, Japan, 25–30 March 2012; IEEE: New York, NY, USA, 2012; pp. 4277–4280. [Google Scholar]
- Milner, B.; Shao, X. Clean speech reconstruction from MFCC vectors and fundamental frequency using an integrated front-end. Speech Commun. 2006, 48, 697–715. [Google Scholar] [CrossRef]
- Rajnoha, J.; Pollak, P. Modified feature extraction methods in robust speech recognition. In Proceedings of the 2007 17th International Conference Radioelektronika, Brno, Czech Republic, 24–25 April 2007; IEEE: New York, NY, USA, 2007; pp. 1–4. [Google Scholar]
- Dramsch, J.S.; Lüthje, M.; Christensen, A.N. Complex-valued neural networks for machine learning on non-stationary physical data. Comput. Geosci. 2021, 146, 104643. [Google Scholar] [CrossRef]
- Seyfioğlu, M.S.; Özbayoğlu, A.M.; Gürbüz, S.Z. Deep convolutional autoencoder for radar-based classification of similar aided and unaided human activities. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 1709–1723. [Google Scholar] [CrossRef]
- Chiheb Trabelsi, O.B.; Ying Zhang, D.S.; Sandeep Subramanian, J.F.S.; Soroush Mehri, N.R.; Yoshua Bengio, C.J.P. Deep Complex Networks. arXiv 2017, arXiv:1705.09792. [Google Scholar]
- Bisong, E. Tensorflow 2.0 and keras. In Building Machine Learning and Deep Learning Models on Google Cloud Platform; Springer: Berlin/Heidelberg, Germany, 2019; pp. 347–399. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Smith, L.N. A disciplined approach to neural network hyper-parameters: Part 1–learning rate, batch size, momentum, and weight decay. arXiv 2018, arXiv:1803.09820. [Google Scholar]
- Zaremba, W.; Sutskever, I.; Vinyals, O. Recurrent neural network regularization. arXiv 2014, arXiv:1409.2329. [Google Scholar]
- Hu, Y.X.; Liu, S.C.; Dong, W. Earthquake Engineering; CRC Press: Boca Raton, FL, USA, 1996. [Google Scholar]
- Cun, Y.L.; Bottou, L.; Orr, G.; Muller, K. Efficient BackProp, neural networks: Tricks of the trade edition. In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2012; Volume 7700. [Google Scholar]
- Ioffe, S.; Szegedy, C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. In Proceedings of the International Conference on Machine Learning, Lille, France, 6–11 July 2015; pp. 448–456. [Google Scholar]
- Ba, J.L.; Kiros, J.R.; Hinton, G.E. Layer normalization. arXiv 2016, arXiv:1607.06450. [Google Scholar]
- Hohmann, V. Frequency analysis and synthesis using a Gammatone filterbank. Acta Acust. United Acust. 2002, 88, 433–442. [Google Scholar]
- Mavko, G.; Mukerji, T.; Dvorkin, J. The Rock Physics Handbook; Cambridge University Press: Cambridge, UK, 2020. [Google Scholar]
- Rani, P.I.; Muneeswaran, K. Emotion recognition based on facial components. Sādhanā 2018, 43, 48. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Number of Layers | Number of Cells in Each Layer | Accuracy | Parameters on Graph |
|---|---|---|---|---|
| 1 | 1 | 32 | 86.94 | 4581 |
| 2 | 1 | 64 | 87.19 | 15,301 |
| 3 | 1 | 128 | 87.38 | 55,173 |
| 4 | 1 | 256 | 87.62 | 208,645 |
| 5 | 2 | 32 | 87.54 | 10,917 |
| 6 | 2 | 64 | 87.69 | 40,261 |
| 7 | 2 | 128 | 88.06 | 154,245 |
| 8 | 2 | 256 | 87.44 | 603,397 |
| 9 | 3 | 32 | 87.62 | 17,253 |
| 10 | 3 | 64 | 87.37 | 65,221 |
| 11 | 3 | 128 | 87.53 | 253,317 |
| 12 | 3 | 256 | 87.27 | 998,149 |
| 13 | 4 | 32 | 88.30 | 23,589 |
| 14 | 4 | 64 | 87.56 | 90,181 |
| 15 | 4 | 128 | 87.19 | 352,389 |
| Network | Learning | Accuracy | Number of | Network | Learning | Accuracy | Number of |
|---|---|---|---|---|---|---|---|
| Structure | Rate | Iterations | Structure | Rate | Iterations | ||
| 1 layer 64 cells | 0.0005 | 87.3 | 64 | 2 layer 32 cells | 0.0005 | 87.4 | 87 |
| 0.00075 | 87.7 | 87 | 0.00075 | 87.3 | 86 | ||
| 0.001 | 87.5 | 72 | 0.001 | 87.6 | 88 | ||
| 0.0025 | 87.4 | 63 | 0.0025 | 87.0 | 53 | ||
| 0.005 | 86.8 | 23 | 0.005 | 87.1 | 22 | ||
| 0.0075 | 83.4 | 8 | 0.0075 | 85.4 | 14 | ||
| 0.01 | 84.3 | 12 | 0.01 | 84.1 | 8 | ||
| 0.0125 | 82.2 | 4 | 0.0125 | 83.2 | 9 | ||
| 0.015 | 81.4 | 3 | 0.015 | 83.2 | 5 | ||
| 0.0175 | 81.7 | 6 | 0.0175 | 83.2 | 8 | ||
| 0.2 | 79.1 | 4 | 0.2 | 82.1 | 4 | ||
| 2 layer 64 cells | 0.0005 | 86.9 | 92 | 2 layer 128 cells | 0.0005 | 87.5 | 34 |
| 0.00075 | 87.9 | 65 | 0.00075 | 87.6 | 31 | ||
| 0.001 | 87.7 | 42 | 0.001 | 87.9 | 31 | ||
| 0.0025 | 86.8 | 25 | 0.0025 | 87.6 | 19 | ||
| 0.005 | 86.3 | 15 | 0.005 | 85.6 | 10 | ||
| 0.0075 | 85.5 | 9 | 0.0075 | 84.1 | 7 | ||
| 0.01 | 85.0 | 6 | 0.01 | 82.1 | 6 | ||
| 0.0125 | 83.4 | 6 | 0.0125 | 81.9 | 5 | ||
| 0.015 | 82.2 | 4 | 0.015 | 81.2 | 5 | ||
| 0.0175 | 80.8 | 5 | 0.0175 | 77.6 | 9 | ||
| 0.2 | 81.2 | 4 | 0.2 | 78.2 | 8 | ||
| 3 layer 32 cells | 0.0005 | 87.4 | 99 | 4 layer 32 cells | 0.0005 | 88.1 | 93 |
| 0.00075 | 88.1 | 89 | 0.00075 | 87.4 | 94 | ||
| 0.001 | 87.9 | 83 | 0.001 | 88.1 | 64 | ||
| 0.0025 | 87.7 | 64 | 0.0025 | 87.4 | 58 | ||
| 0.005 | 87.4 | 39 | 0.005 | 87.3 | 13 | ||
| 0.0075 | 86.3 | 14 | 0.0075 | 84.5 | 12 | ||
| 0.01 | 84.2 | 12 | 0.01 | 82.3 | 7 | ||
| 0.0125 | 83.9 | 6 | 0.0125 | 82.2 | 4 | ||
| 0.015 | 82.8 | 4 | 0.015 | 81.8 | 8 | ||
| 0.0175 | 81.9 | 4 | 0.0175 | 82.1 | 4 | ||
| 0.2 | 82.0 | 8 | 0.2 | 79.0 | 4 |
| Input | Network Structure | |||||
|---|---|---|---|---|---|---|
| 1 Layer 128 Cells | 2 Layers 32 Cells | 2 Layers 64 Cells | 2 Layers 128 Cells | 3 Layers 32 Cells | 4 Layers 32 Cells | |
| MFCCs | 87.5 | 87.6 | 87.7 | 87.9 | 87.9 | 88.1 |
| MFSCs | 85.7 | 85.0 | 86.7 | 87.9 | 88.4 | 88.9 |
| Model | Method | Accuracy % | Increase % | |
|---|---|---|---|---|
| Hand-Crafted | 87.6 | - | ||
| AFEM | 87.9 | 0.2 | ||
| 88.6 | 1.1 | |||
| 89.0 | 1.6 | |||
| 89.2 | 1.8 | |||
| AFEM (exponential) | 88.3 | 0.8 | ||
| Log-Domain | Batch-Norm | Layer-Norm | Accuracy % |
|---|---|---|---|
| ✓ | ✓ | ✓ | 89.2 |
| ✓ | ✓ | × | 88.7 |
| × | ✓ | ✓ | 84.5 |
| ✓ | × | ✓ | 86.0 |
| No. | Initialization Method | Accuracy % | Increase % |
|---|---|---|---|
| 1 | Mel | 89.2 | 1.8 |
| 2 | Linear | 88.9 | 1.5 |
| 3 | Gauss | 89.0 | 1.6 |
| 4 | Brak | 89.4 | 2.1 |
| 5 | ERB | 88.6 | 1.1 |
| 6 | GammaTone | 89.0 | 1.6 |
| Model | Method | Features | Non-Linearity | Accuracy % | Increase % | Training Times (h) |
|---|---|---|---|---|---|---|
| Hand-Crafted | Amplitude | Log | 87.6 | - | 3.5 | |
| AFEM | Amplitude | Log | 89.2 | 1.8 | 3.3 | |
| Power | 89.2 | 1.8 | 3.2 | |||
| Phases | Log | 93.6 | 6.8 | 3.4 | ||
| Power | 94.1 | 7.4 | 2.9 | |||
| Amplitude and Phases | Log | 93.8 | 7.1 | 3.5 | ||
| Power | 94.4 | 7.6 | 3.2 |
| Model | Method | Features | Non-Linearity | Accuracy % | Increase % | Training Times (h) |
|---|---|---|---|---|---|---|
| AFEM | Complex | Log | 93.7 | 7.0 | 3.2 | |
| Power | 95.1 | 8.6 | 3.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, P.; Li, Y.; Lin, Y.; Jiang, H. Time-Frequency Feature-Based Seismic Response Prediction Neural Network Model for Building Structures. Appl. Sci. 2023, 13, 2956. https://doi.org/10.3390/app13052956
Zhang P, Li Y, Lin Y, Jiang H. Time-Frequency Feature-Based Seismic Response Prediction Neural Network Model for Building Structures. Applied Sciences. 2023; 13(5):2956. https://doi.org/10.3390/app13052956
Chicago/Turabian StyleZhang, Peng, Yiming Li, Yu Lin, and Huiqin Jiang. 2023. "Time-Frequency Feature-Based Seismic Response Prediction Neural Network Model for Building Structures" Applied Sciences 13, no. 5: 2956. https://doi.org/10.3390/app13052956
APA StyleZhang, P., Li, Y., Lin, Y., & Jiang, H. (2023). Time-Frequency Feature-Based Seismic Response Prediction Neural Network Model for Building Structures. Applied Sciences, 13(5), 2956. https://doi.org/10.3390/app13052956