
Silicone Elastomeric-Based Materials of Soft Pneumatic Actuator for Lower-Limb Rehabilitation: Finite Element Modelling and Prototype Experimental Validation
 , , , , ,
, , , , ,
Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author [Ref.] | Site of Application | Material | Functionalities | Advantages | Challenges |
|---|---|---|---|---|---|
| Chua et al. [11] | Fingers and Joints | Thermoplastic polyurethane (TPU) | Lateral compression for rheumatoid arthritis | Varying stiffness | Control-ability |
| Thalman et al. [12] | Ankle foot | 200D TPU coated nylon | Provide inversion and eversion ankle support | Varying stiffness | Control-ability |
| Mengjia Zhu et al. [13] | Limbs | Fabric sheet | Wearable and soft robotics | Lightweight and low-cost | Untethered operation control-ability |
| Xiao et al. [14] | Wrist and palmer | Elastomers and fiber | To decrease wrist and palmer loads | Lightweight, effective | / |
| Fang et al. [23] | Knee | TPU fabric | Knee rehabilitation and movement | Lightweight, easy-to-control | On-board power source |
| Li et al. [24] | Hand | Soft latex | Passive hand rehabilitation for stroke patients | Low-cost, lightweight, easy-to-wear | No individual control of the finger |
2. Materials and Methods
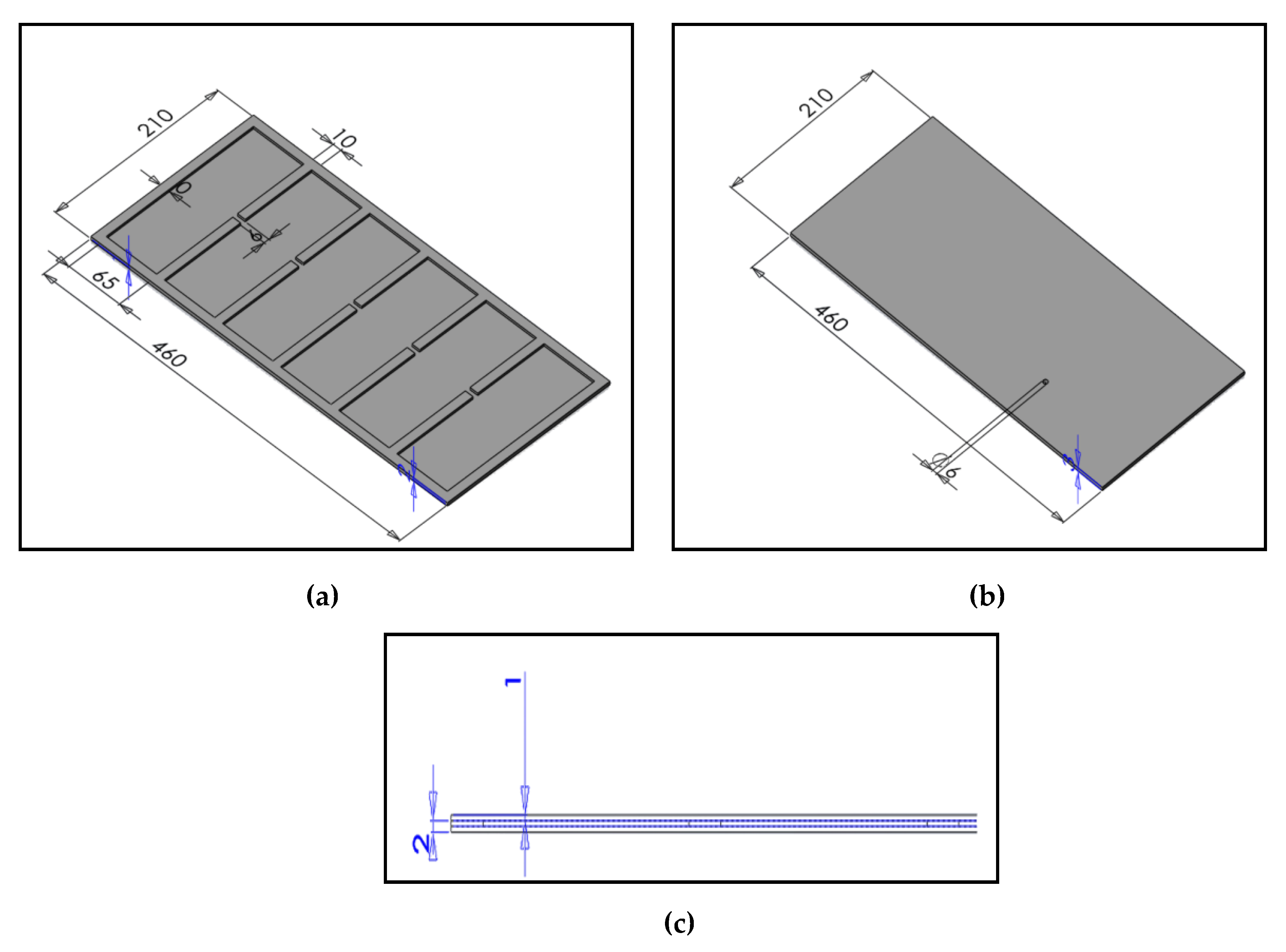
2.1. 3D-Modelling Construction
2.2. Material Properties and Characteristics
| Sylgard 184 | A15 Shore | A10 Shore | |
|---|---|---|---|
| Manufacturer | Dow Corning | Clay art | Clay art |
| Color | Colourless | Translucent | Grey |
| Shore hardness | A50 | A15 | A10 |
| Tensile strength | 980 psi | 537 psi | 475 psi |
| Density | 1.04 g/cm3 | 1.35 g/cm3 | 1.35 g/cm3 |
| Elongation at break | 150% | 771% | 1000% |
| Durometer shore | 50 | 15 | 10 |
| Young’s modulus | 1.32–2.97 MPa | 0.74 MPa | 0.25 MPa |
| Model parameter | 0.42480 MPa = −0.15880 MPa 0.24350 MPa [29] | 0.69760 MPa = −0.24484 MPa 0.12629 MPa [30] | 0.00204 MPa −0.17070 MPa 2.05000 MPa [31] |
2.3. 3D Simulation of the Proposed Soft Pneumatic Actuator (SPA) System
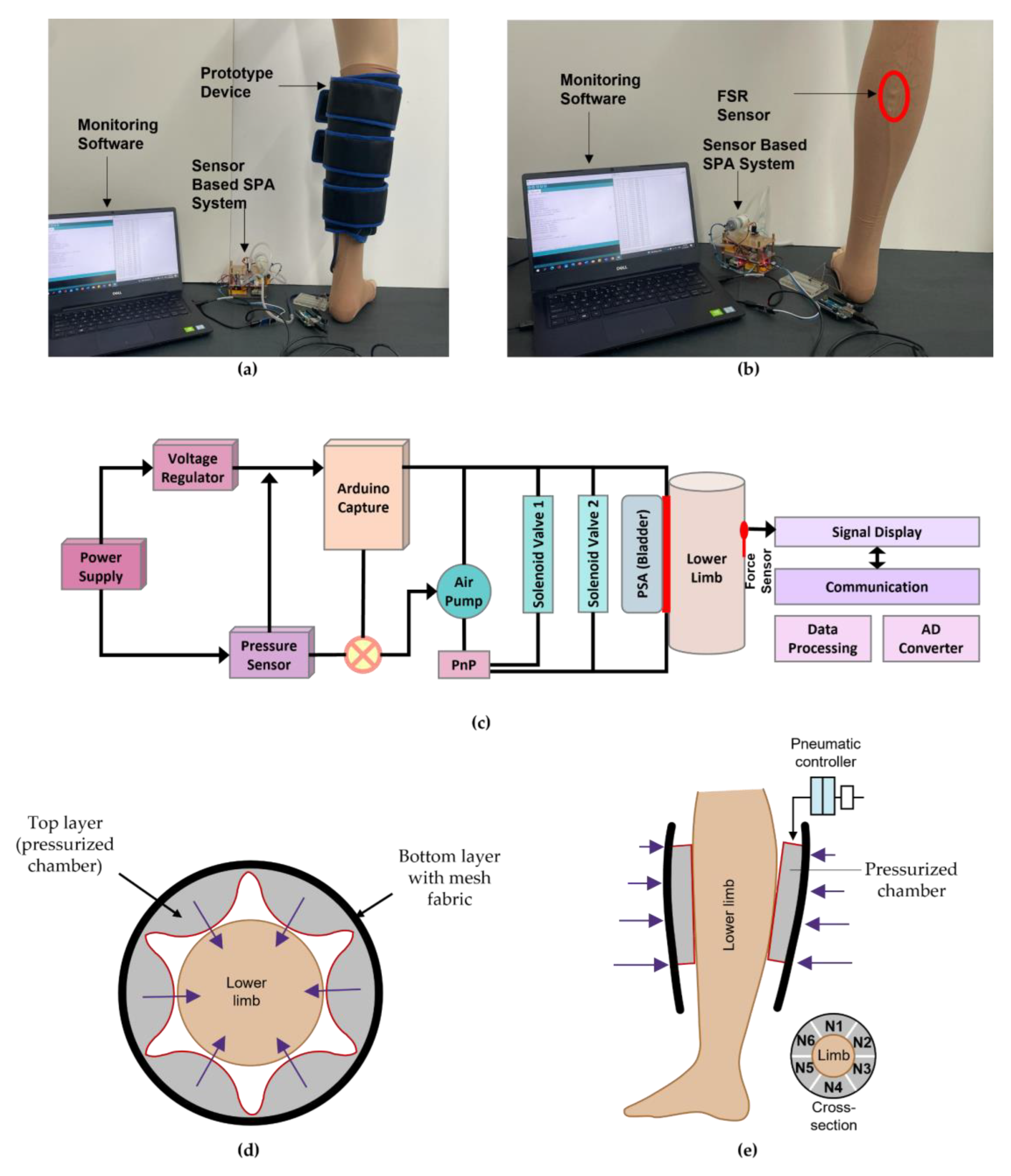
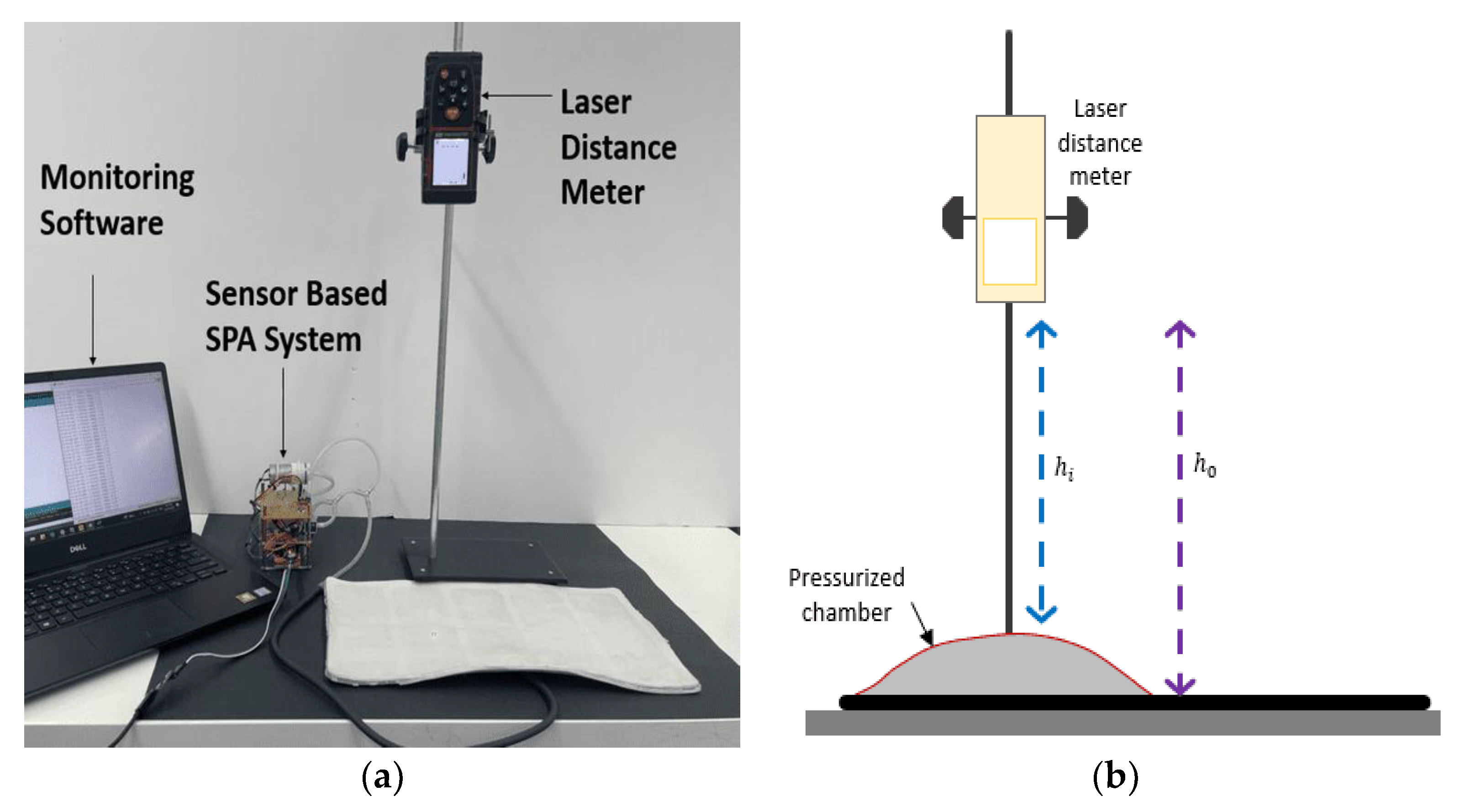
2.4. Experimental Analysis of SPA for Lower Limb
2.5. Data Analysis
3. Results
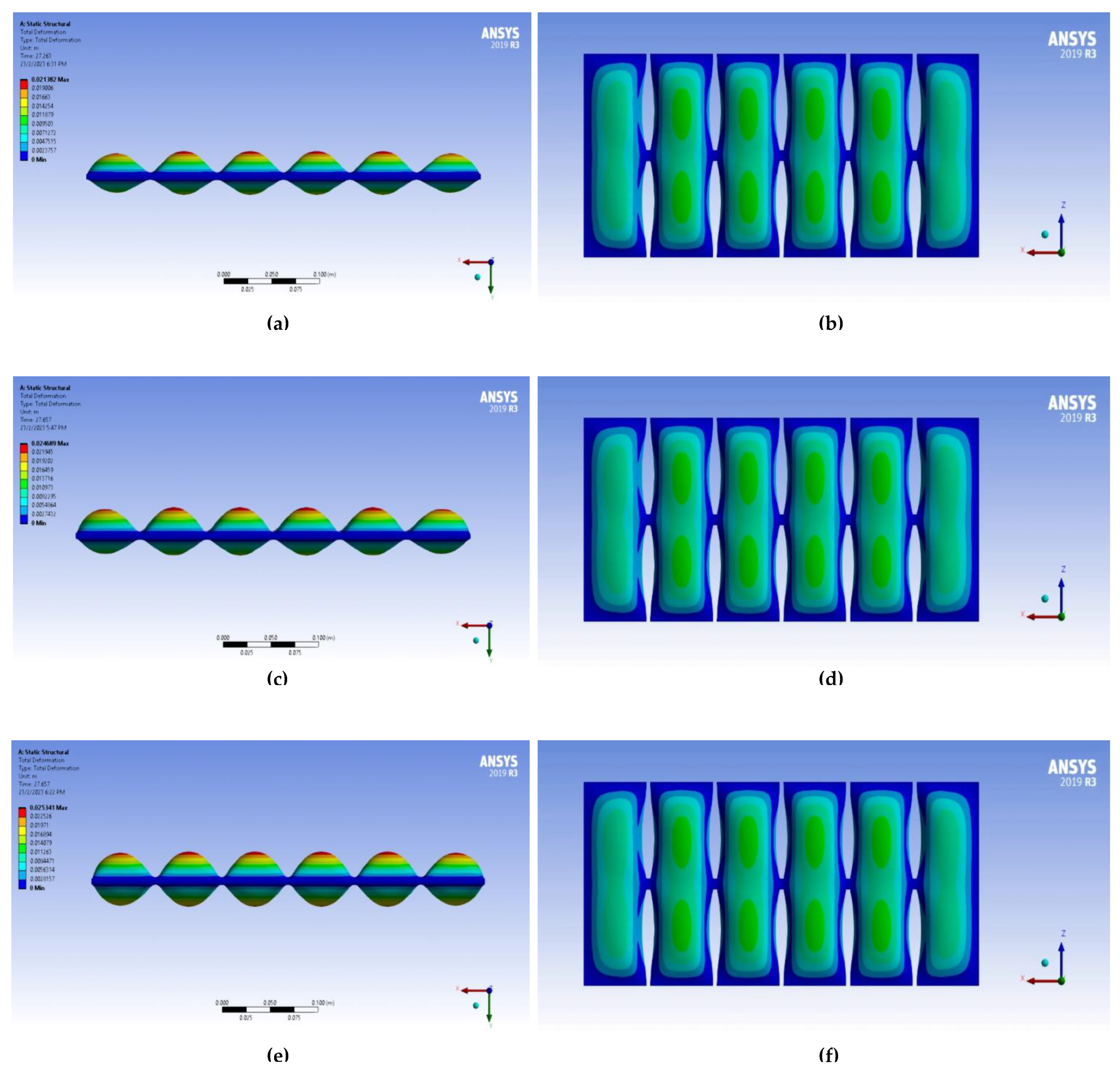
3.1. Simulated 3D Deformation Results of the Proposed Chamber Using Three Different Materials
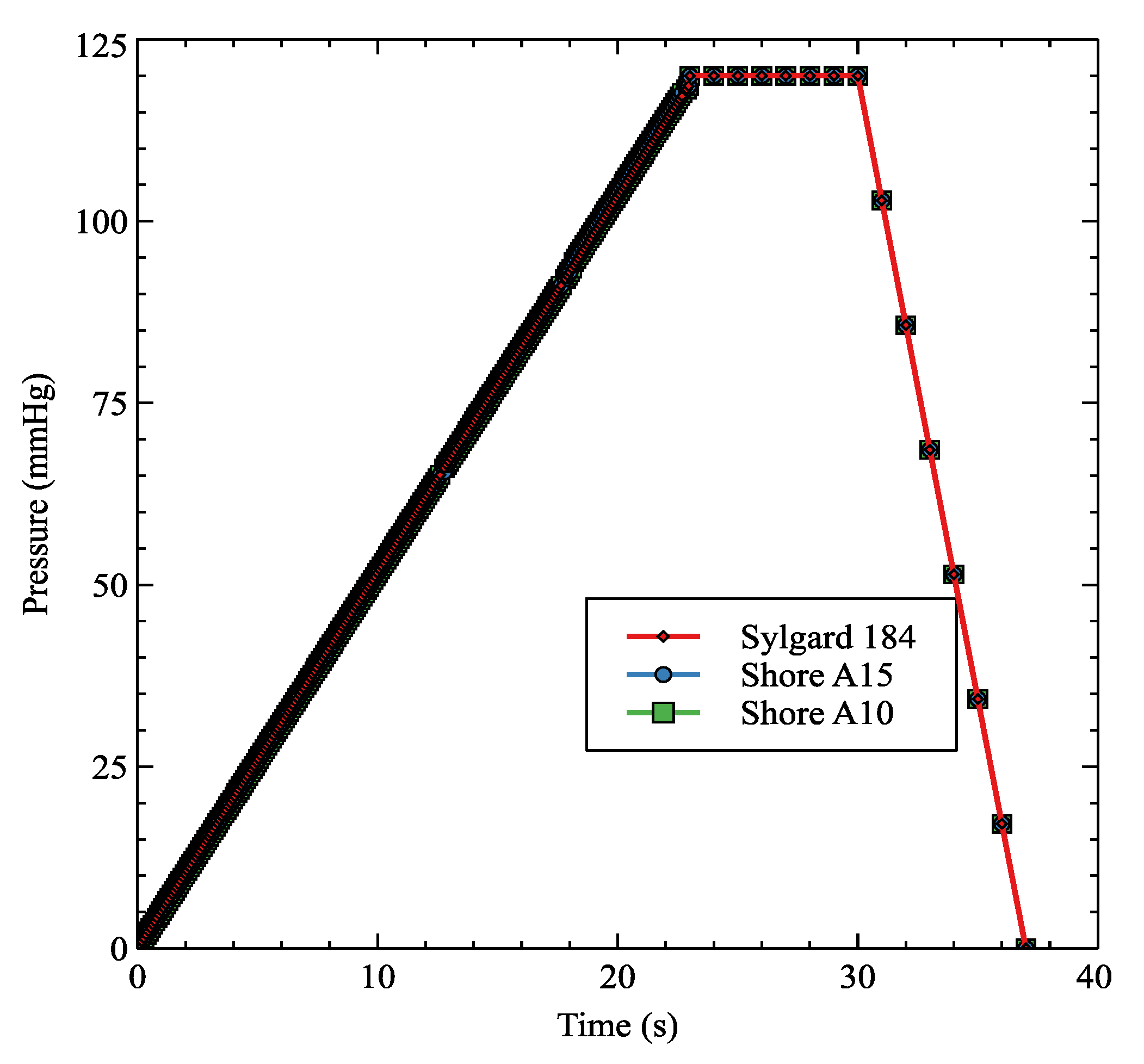
3.2. Comparison and Validation of Simulation and Experimental Results
4. Discussion
- This SPA model presented the soft, robust, biocompatible, and non-hazardous materials that have the elasticity properties of commercial silicone, and the extreme deformation change accompanying a pressure transition. The materials have high tensile strengths similar to conventional silicone-based elastomers—up to 1000%. These features have the potential to produce higher deformation with excellent tear resistance while maintaining the appropriate compression pressure on the calf.
- The proposed system is a simple and lightweight sensor-based SPA system with the dimensions of 10 cm in length, 8 cm in width, and 6 cm in height. This system offers the option of employing a simple, lightweight pump with adjustable cycle time and pressure supply settings for individual comfort. It is an appropriate compression device for offering safe and effective compression therapy while being lightweight enough for the user to carry. This prototype can serve as a new rehabilitation tool that can improve the quality of life for individuals with lower-limb disabilities. The use of these devices can potentially reduce the need for traditional physical therapy, leading to more efficient and cost-effective treatment options.
- We provide a comprehensive analysis by considering the inner wall pressure distribution in simulation and anticipate actual compression to the calf. With the comparison of the inner wall pressure and the pressure transferred by the SPA chamber onto a mannequin leg, we can determine the compression capability before clinical testing. The maximum deformation of the 3D model at the inner wall of the chamber was 25.34 mm, whereas the maximum experimental deformation of the SPA chamber was 28 mm. It can be seen from the results that the experimental results for the SPA system show a more than 0.9 reliability agreement with the simulation data for the range of pressure 0–120 mmHg.
- The research has the potential to contribute to improvements in health and socioeconomic development. The use of soft pneumatic actuators can lead to better rehabilitation outcomes, which can improve the quality of life for individuals with lower-limb disabilities. Improved rehabilitation outcomes can also lead to increased productivity and reduced healthcare costs. The use of cost-effective and efficient treatment options can potentially benefit low- and middle-income countries, where access to traditional physical therapy may be limited.
5. Conclusions
6. Limitation and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- McGuine, T.A.; Post, E.G.; Hetzel, S.J.; Brooks, M.A.; Trigsted, S.; Bell, D.R. A Prospective Study on the Effect of Sport Specialization on Lower Extremity Injury Rates in High School Athletes. Am. J. Sports Med. 2017, 45, 2706–2712. [Google Scholar] [CrossRef] [PubMed]
- Bramah, C.; Preece, S.J.; Gill, N.; Herrington, L. Is There a Pathological Gait Associated with Common Soft Tissue Running Injuries? Am. J. Sports Med. 2018, 46, 3023–3031. [Google Scholar] [CrossRef] [PubMed]
- Bisciotti, G.N.; Volpi, P.; Amato, M.; Alberti, G.; Allegra, F.; Aprato, A.; Artina, M.; Auci, A.; Bait, C.; Bastieri, G.M.; et al. Italian Consensus Conference on Guidelines for Conservative Treatment on Lower Limb Muscle Injuries in Athlete. BMJ Open Sport Exerc. Med. 2018, 4, e000323. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ishøi, L.; Krommes, K.; Husted, R.S.; Juhl, C.B.; Thorborg, K. Diagnosis, Prevention and Treatment of Common Lower Extremity Muscle Injuries in Sport—Grading the Evidence: A Statement Paper Commissioned by the Danish Society of Sports Physical Therapy (DSSF). Br. J. Sports Med. 2020, 54, 528–539. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schwellnus, M.P.; Swanevelder, S.; Jordaan, E.; Derman, W.; Van Rensburg, D.C.J. Underlying Chronic Disease, Medication Use, History of Running Injuries and Being a More Experienced Runner Are Independent Factors Associated with Exercise-Associated Muscle Cramping: A Cross-Sectional Study in 15,778 Distance Runners. Clin. J. Sport Med. 2018, 28, 289–298. [Google Scholar] [CrossRef] [PubMed]
- Ostrowski, J.; Purchio, A.; Beck, M.; Leisinger, J. Effectiveness of Salted Ice Bag Versus Cryo-Compression on Decreasing Intramuscular and Skin Temperature Authors. J. Sport Rehabil. 2017, 28, 588–595. [Google Scholar] [CrossRef]
- Hilberg, T.; Ransmann, P.; Hagedorn, T. Sport und Venöse Thromboembolie. Dtsch. Arztebl. Int. 2021, 118, 181–187. [Google Scholar] [CrossRef]
- Youn, Y.J.; Lee, J. Chronic Venous Insufficiency and Varicose Veins of the Lower Extremities. Korean J. Intern. Med. 2019, 34, 269–283. [Google Scholar] [CrossRef] [Green Version]
- Berszakiewicz, A.; Sieroń, A.; Krasiński, Z.; Cholewka, A.; Stanek, A. Compression Therapy in Venous Diseases: Current Forms of Compression Materials and Techniques. Postep. Dermatol. Alergol. 2021, 37, 836–841. [Google Scholar] [CrossRef]
- Rosalia, L.; Lamberti, K.K.; Landry, M.K.; Leclerc, C.M.; Shuler, F.D.; Hanumara, N.C.; Roche, E.T. A soft robotic sleeve for compression therapy of the lower limb. In Proceedings of the 2021 43rd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Guadalajara, Mexico, 1–5 November 2021; pp. 2258–2265. [Google Scholar]
- Chua, M.C.H.; Lim, J.H.; Yeow, R.C.H. Design and Characterization of a Soft Robotic Therapeutic Glove for Rheumatoid Arthritis. Assist. Technol. 2019, 31, 44–52. [Google Scholar] [CrossRef]
- Thalman, C.M.; Lee, H. Design and Validation of a Soft Robotic Ankle-Foot Orthosis (SR-AFO) Exosuit for Inversion and Eversion Ankle Support. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 1735–1741. [Google Scholar] [CrossRef]
- Zhu, M.; Do, T.N.; Hawkes, E.; Visell, Y. Fluidic Fabric Muscle Sheets for Wearable and Soft Robotics. Soft Robot. 2020, 7, 179–197. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xiao, C.; Jahanian, O.; Schnorenberg, A.; Slavens, B.; Hsiao-Wecksler, E. Design and Biomechanical Evaluation Methodology of Pneumatic Ergonomic Crutch. In Proceedings of the 2017 Design of Medical Devices Conference, Minneapolis, MN, USA, 10–13 April 2017; pp. 10–11. [Google Scholar] [CrossRef] [Green Version]
- Zhao, S.; Liu, R.; Fei, C.; Guan, D. Dynamic Interface Pressure Monitoring System for the Morphological Pressure Mapping of Intermittent Pneumatic Compression Therapy. Sensors 2019, 19, 2881. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, S.; Liu, R.; Wu, X.; Ye, C.; Zia, A.W. A Programmable and Self-Adaptive Dynamic Pressure Delivery and Feedback System for Efficient Intermittent Pneumatic Compression Therapy. Sens. Actuators A Phys. 2020, 315, 112285. [Google Scholar] [CrossRef]
- Miriyev, A.; Stack, K.; Lipson, H. Soft Material for Soft Actuators. Nat. Commun. 2017, 8, 596. [Google Scholar] [CrossRef] [Green Version]
- Craddock, M.; Augustine, E.; Konerman, S.; Shin, M. Biorobotics: An Overview of Recent Innovations in Artificial Muscles. Actuators 2022, 11, 168. [Google Scholar] [CrossRef]
- Coyle, S.; Majidi, C.; Leduc, P.; Hsia, K.J. Bio-Inspired Soft Robotics: Material Selection, Actuation, and Design. Extrem. Mech. Lett. 2018, 22, 51–59. [Google Scholar] [CrossRef]
- Pagoli, A.; Chapelle, F.; Antonio, J.; Ramon, C.; Lapusta, Y.; Pagoli, A.; Chapelle, F.; Antonio, J.; Ramon, C.; Mezouar, Y.; et al. Review of Soft Fluidic Actuators: Classification and Materials Modeling Analysis. Smart Mater. Struct. 2022, 31, 013001. [Google Scholar] [CrossRef]
- Huri, D.; Mankovits, T. Comparison of the Material Models in Rubber Finite Element Analysis. IOP Conf. Ser. Mater. Sci. Eng. 2018, 393, 012018. [Google Scholar] [CrossRef]
- Mourtzis, D. Simulation in the Design and Operation of Manufacturing Systems: State of the Art and New Trends. Int. J. Prod. Res. 2020, 58, 1927–1949. [Google Scholar] [CrossRef]
- Fang, J.; Yuan, J.; Wang, M.; Xiao, L.; Yang, J.; Lin, Z.; Xu, P.; Hou, L. Novel Accordion-Inspired Foldable Pneumatic Actuators for Knee Assistive Devices. Soft Robot. 2020, 7, 95–108. [Google Scholar] [CrossRef]
- Li, H.; Cheng, L. Preliminary Study on the Design and Control of a Pneumatically-Actuated Hand Rehabilitation Device. In Proceedings of the 2017 32nd Youth Academic Annual Conference of Chinese Association of Automation (YAC), Hefei, China, 19–21 May 2017; pp. 860–865. [Google Scholar] [CrossRef]
- Soft Robotics Toolkit Soft Robotics Toolkit. Available online: https://softroboticstoolkit.com/ (accessed on 20 November 2022).
- Maruthavanan, D.; Seibel, A.; Schlattmann, J. Fluid-Structure Interaction Modelling of a Soft Pneumatic Actuator. Actuators 2021, 10, 163. [Google Scholar] [CrossRef]
- Steck, D.; Qu, J.; Kordmahale, S.B.; Tscharnuter, D.; Muliana, A.; Kameoka, J. Mechanical Responses of Ecoflex Silicone Rubber: Compressible and Incompressible Behaviors. J. Appl. Polym. Sci. 2019, 136, 1–11. [Google Scholar] [CrossRef]
- Xavier, M.S.; Fleming, A.J.; Yong, Y.K. Finite Element Modeling of Soft Fluidic Actuators: Overview and Recent Developments. Adv. Intell. Syst. 2021, 3, 2000187. [Google Scholar] [CrossRef]
- Pini, L. Geometry Optimization for Biaxial Testing of Polydimethylsiloxane SYLGARD 184 and Finite Element Modelling; Politecnico di Milano: Milan, Italy, 2020. [Google Scholar]
- Product, A. Axel Products Physical Testing Services. Available online: http://www.axelproducts.com/ (accessed on 20 November 2022).
- Di Lecce, M.; Onaizah, O.; Lloyd, P.; Chandler, J.H.; Valdastri, P. Evolutionary Inverse Material Identification: Bespoke Characterization of Soft Materials Using a Metaheuristic Algorithm. Front. Robot. AI 2022, 8, 790571. [Google Scholar] [CrossRef]
- Guan, D.; Liu, R.; Fei, C.; Zhao, S.; Jing, L. Fluid-Structure Coupling Model and Experimental Validation of Interaction between Pneumatic Soft Actuator and Lower Limb. Soft Robot. 2020, 7, 627–638. [Google Scholar] [CrossRef] [PubMed]
- Tawk, C.; Alici, G. Finite Element Modeling in the Design Process of 3D Printed Pneumatic Soft Actuators and Sensors. Robotics 2020, 9, 52. [Google Scholar] [CrossRef]
- Li, Q.; Sun, G.; Chen, Y.; Chen, X.; Shen, Y.; Xie, H.; Li, Y. Fabricated Leg Mannequin for the Pressure Measurement of Compression Stockings. Text. Res. J. 2022, 92, 3500–3510. [Google Scholar] [CrossRef]
- Fernández-González, P.; Koutsou, A.; Cuesta-Gómez, A.; Carratalá-Tejada, M.; Miangolarra-Page, J.C.; Molina-Rueda, F. Reliability of Kinovea® Software and Agreement with a Three-Dimensional Motion System for Gait Analysis in Healthy Subjects. Sensors 2020, 20, 3154. [Google Scholar] [CrossRef]
- Liu, J.; Liu, Y.; Wang, J.; Zuo, X.; Wang, X.; Zhang, Y.; He, H. Dental Measurements Based on a Three-Dimensional Digital Technique: A Comparative Study on Reliability and Validity. Arch. Oral Biol. 2021, 124, 105059. [Google Scholar] [CrossRef] [PubMed]
- Gerke, O. Reporting Standards for a Bland-Altman Agreement Analysis: A Review of Methodological Reviews. Diagnostics 2020, 10, 334. [Google Scholar] [CrossRef]
- Lau, E. Accuracy of Bromocresol Green (BCG) Method for Plasma Albumin. Bachelor’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2020. [Google Scholar]
- Smooth-On Durometer Shore Hardness Scale. Available online: https://www.smooth-on.com/page/durometer-shore-hardness-scale/ (accessed on 20 November 2022).
- Gorissen, B.; Reynaerts, D.; Konishi, S.; Yoshida, K.; Kim, J.W.; De Volder, M. Elastic Inflatable Actuators for Soft Robotic Applications. Adv. Mater. 2017, 29, 1604977. [Google Scholar] [CrossRef] [PubMed]
- Carvalho, A.D.D.R.; Karanth, P.N.; Desai, V. Characterization of Pneumatic Muscle Actuators and Their Implementation on an Elbow Exoskeleton with a Novel Hinge Design. Sens. Actuators Rep. 2022, 4, 100109. [Google Scholar] [CrossRef]
- Mosadegh, B.; Polygerinos, P.; Keplinger, C.; Wennstedt, S.; Shepherd, R.F.; Gupta, U.; Shim, J.; Bertoldi, K.; Walsh, C.J.; Whitesides, G.M. Pneumatic Networks for Soft Robotics That Actuate Rapidly. Adv. Funct. Mater. 2014, 24, 2163–2170. [Google Scholar] [CrossRef] [Green Version]
- Leitner, J.; Chiang, P.H.; Dey, S. Personalized Blood Pressure Estimation Using Photoplethysmography: A Transfer Learning Approach. IEEE J. Biomed. Health Inform. 2022, 26, 218–228. [Google Scholar] [CrossRef] [PubMed]
- Song, Y.; Cen, X.; Zhang, Y.; Bíró, I.; Ji, Y.; Gu, Y. Development and Validation of a Subject-Specific Coupled Model for Foot and Sports Shoe Complex: A Pilot Computational Study. Bioengineering 2022, 9, 553. [Google Scholar] [CrossRef] [PubMed]
- Fleiss, J.L. The Design and Analysis of Clinical Experiments; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2014; Volume 43, pp. 43–44. [Google Scholar]
- Zaleska, M.; Olszewski, W.L.; Jain, P.; Gogia, S.; Rekha, A.; Mishra, S.; Durlik, M. Pressures and Timing of Intermittent Pneumatic Compression Devices for Efficient Tissue Fluid and Lymph Flow in Limbs with Lymphedema. Lymphat. Res. Biol. 2013, 11, 227–232. [Google Scholar] [CrossRef] [Green Version]
- Nandasiri, G.K.; Ianakiev, A.; Dias, T. Hyperelastic Properties of Platinum Cured Silicones and Its Applications in Active Compression. Polymers 2020, 12, 148. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Walker, J.; Zidek, T.; Harbel, C.; Yoon, S.; Strickland, F.S.; Kumar, S.; Shin, M. Soft Robotics: A Review of Recent Developments of Pneumatic Soft Actuators. Actuators 2020, 9, 3. [Google Scholar] [CrossRef] [Green Version]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bakeri, H.; Hasikin, K.; Abd Razak, N.A.; Mohd Razman, R.; Khamis, A.A.; Annuha, M.‘A.; Tajuddin, A.; Reza, D. Silicone Elastomeric-Based Materials of Soft Pneumatic Actuator for Lower-Limb Rehabilitation: Finite Element Modelling and Prototype Experimental Validation. Appl. Sci. 2023, 13, 2977. https://doi.org/10.3390/app13052977
Bakeri H, Hasikin K, Abd Razak NA, Mohd Razman R, Khamis AA, Annuha M‘A, Tajuddin A, Reza D. Silicone Elastomeric-Based Materials of Soft Pneumatic Actuator for Lower-Limb Rehabilitation: Finite Element Modelling and Prototype Experimental Validation. Applied Sciences. 2023; 13(5):2977. https://doi.org/10.3390/app13052977
Chicago/Turabian StyleBakeri, Hanisah, Khairunnisa Hasikin, Nasrul Anuar Abd Razak, Rizal Mohd Razman, Abd Alghani Khamis, Muhammad ‘Ammar Annuha, Abbad Tajuddin, and Darween Reza. 2023. "Silicone Elastomeric-Based Materials of Soft Pneumatic Actuator for Lower-Limb Rehabilitation: Finite Element Modelling and Prototype Experimental Validation" Applied Sciences 13, no. 5: 2977. https://doi.org/10.3390/app13052977