
Study of the Interaction between Regular Waves and a Wind-Fish Combined Structure
Abstract
:1. Introduction
2. Numerical Simulation
2.1. Control Equation
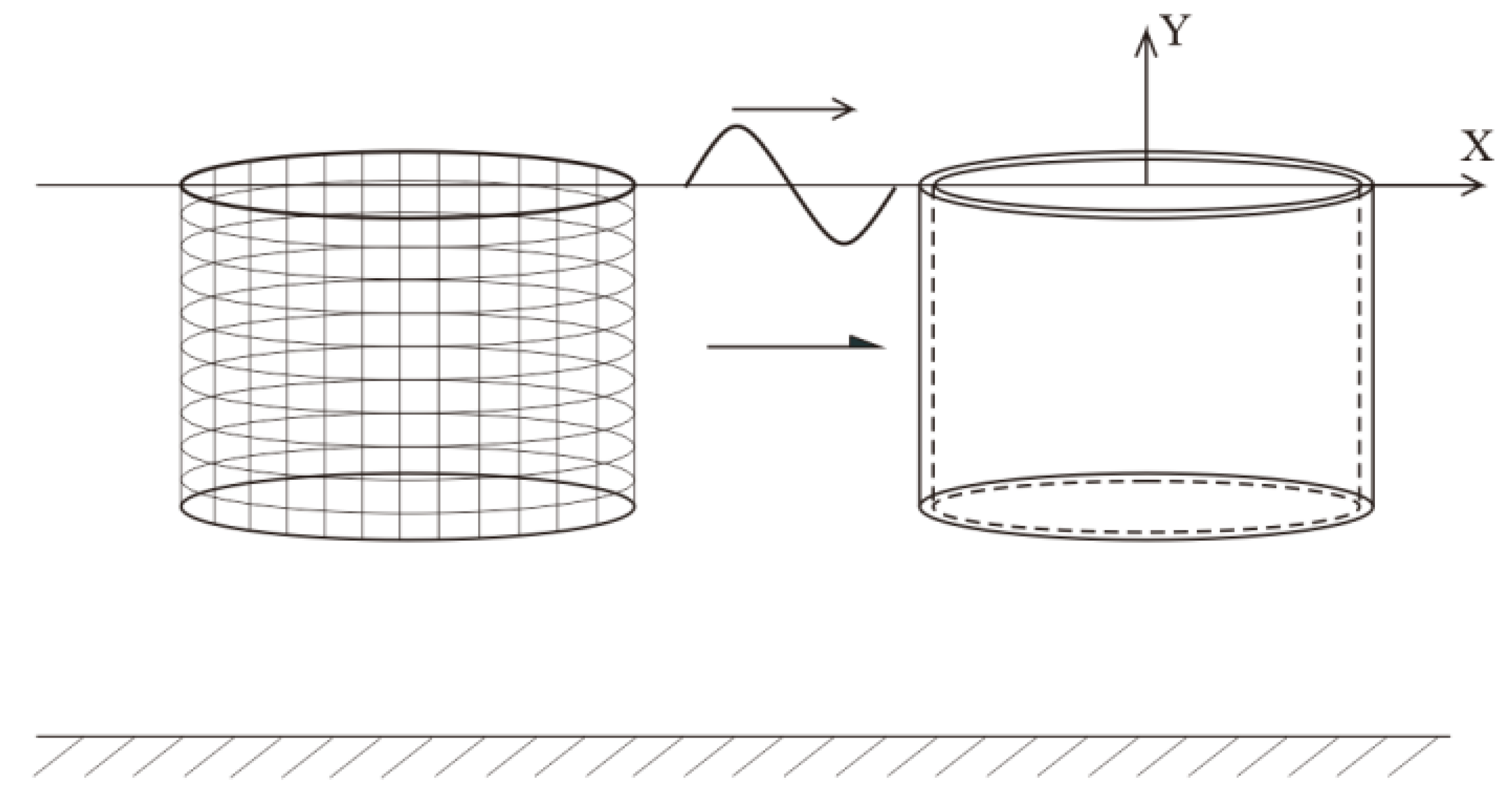
2.2. Porous Media Model
2.3. Calculation Method of Structural Load
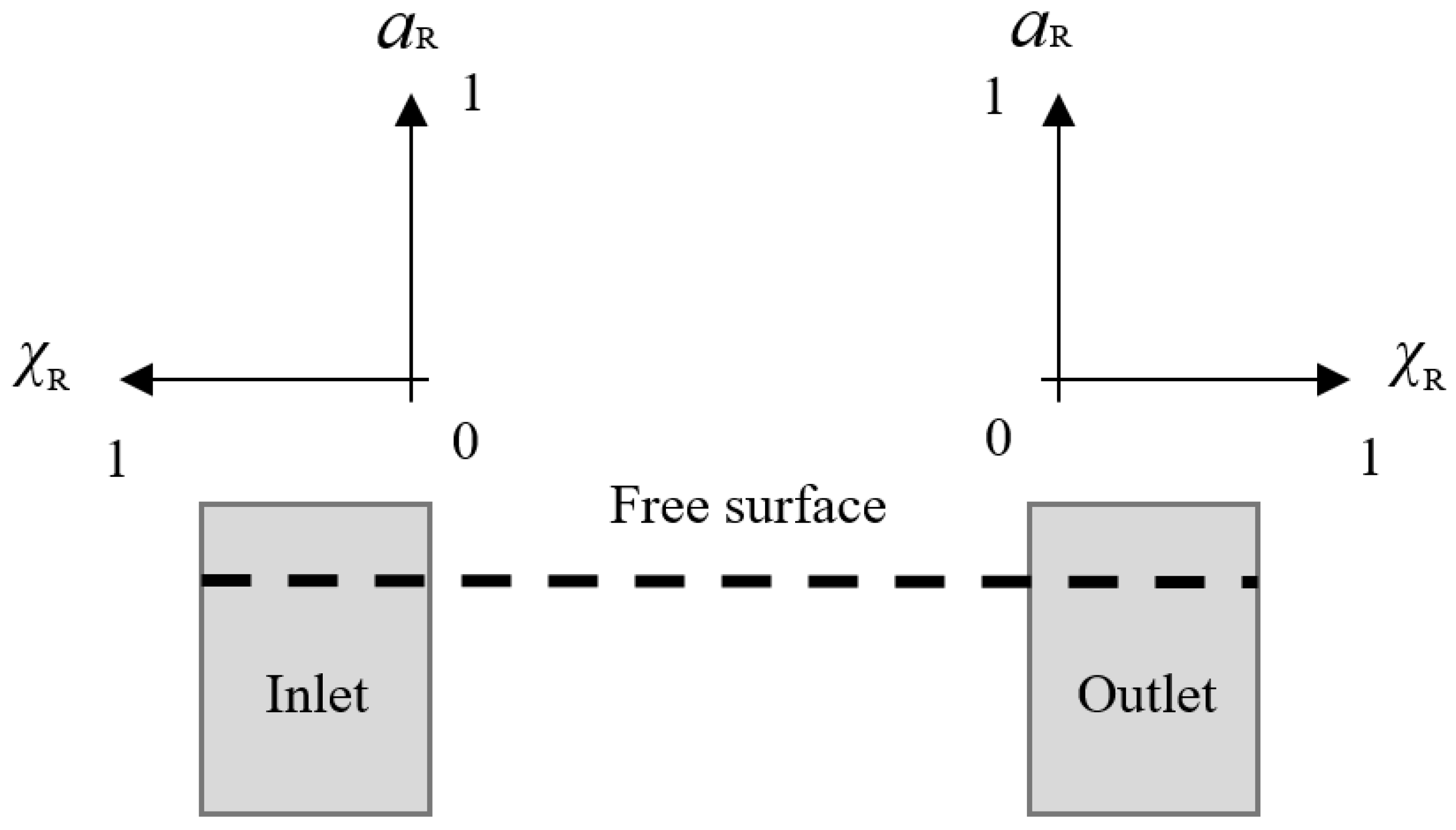
2.4. Free Surface Tracking
2.5. Numerical Wave Making and Wave Attenuation
- (1)
- Regular wave generation
- (2)
- Wave elimination
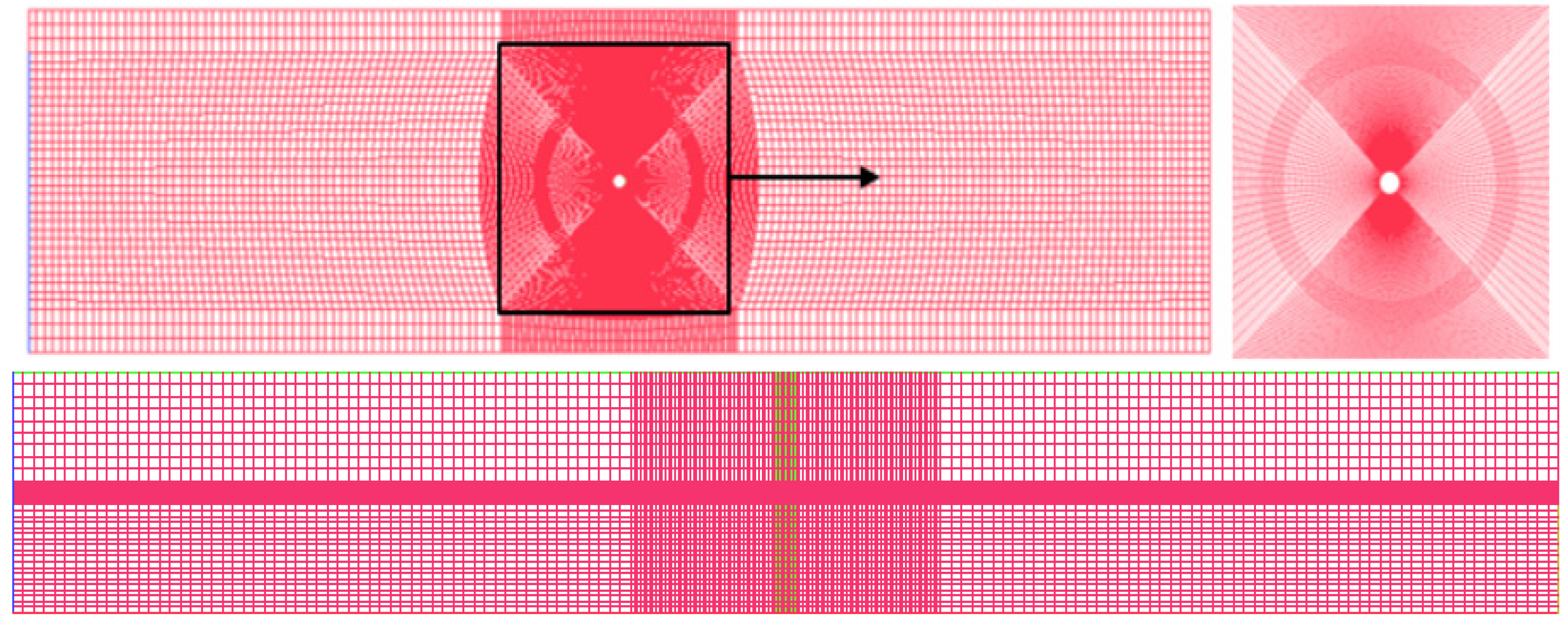
2.6. Model Settings and Boundary Conditions
3. Results
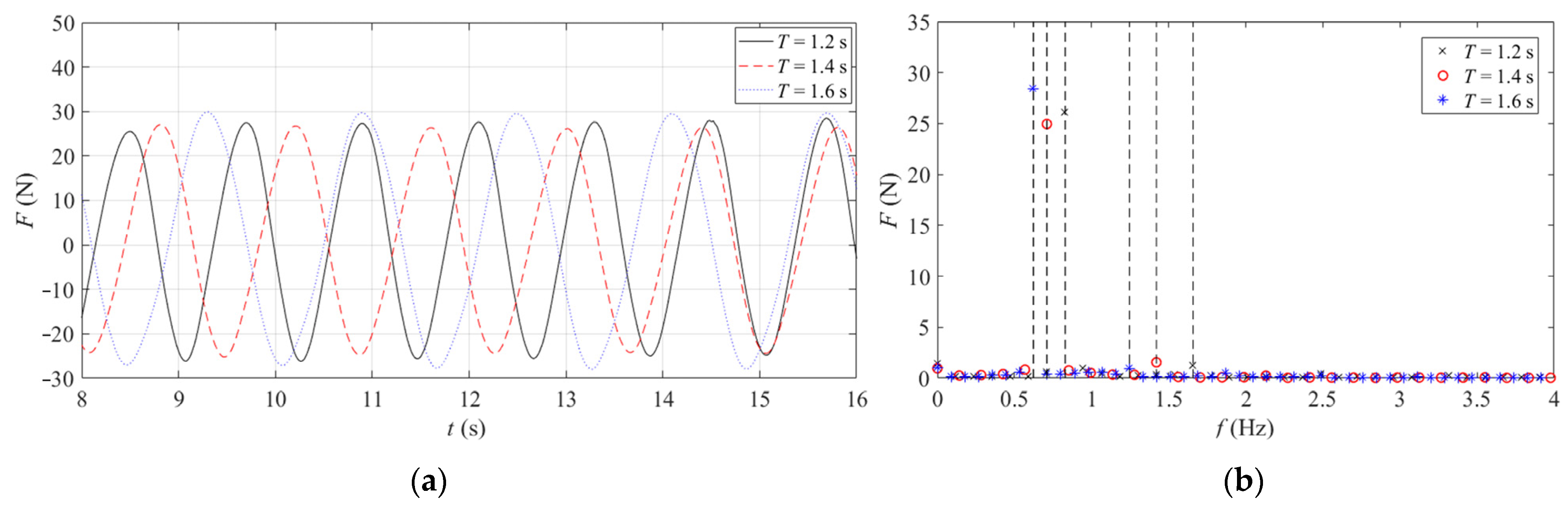
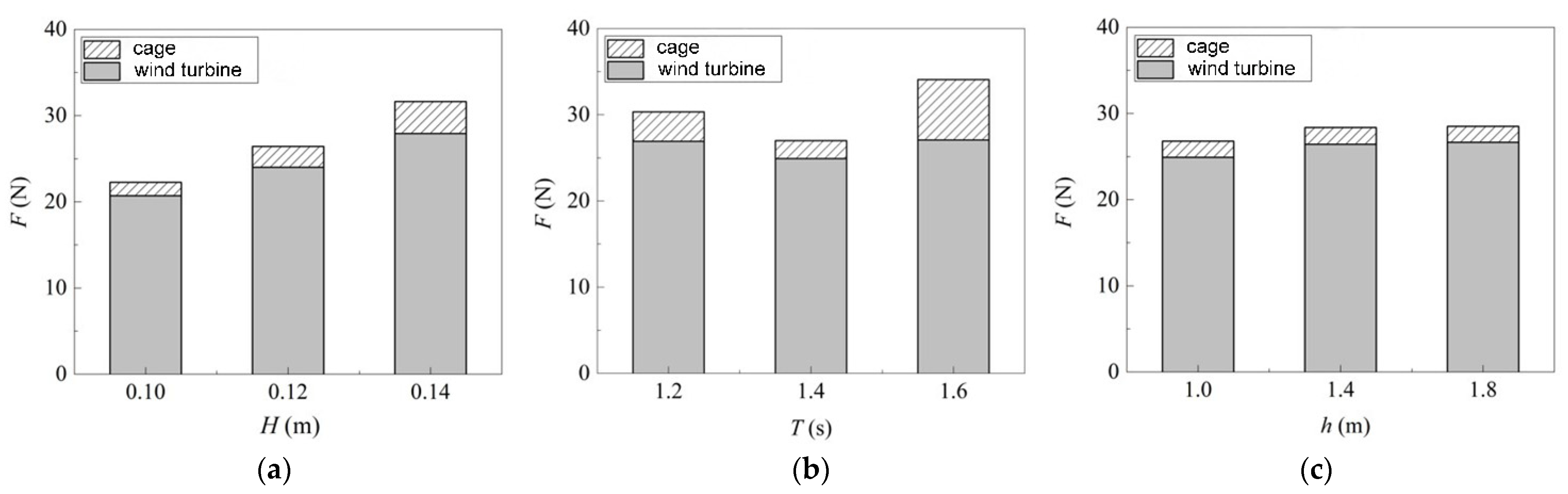
3.1. Wave Environmental Factors
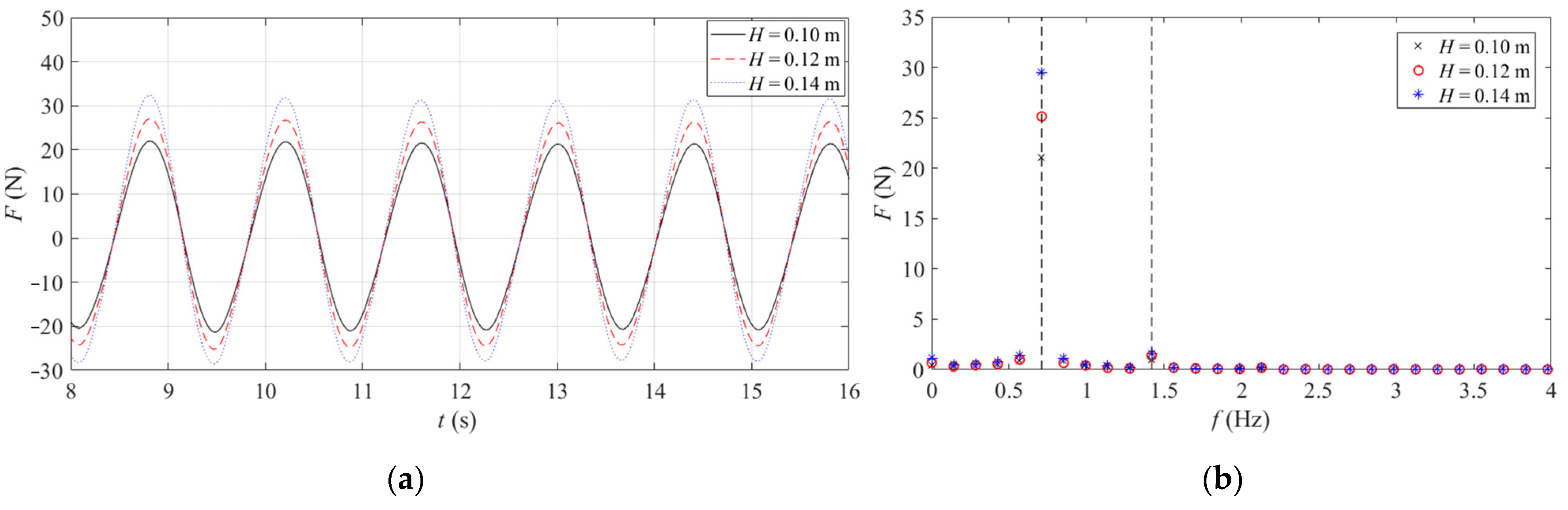
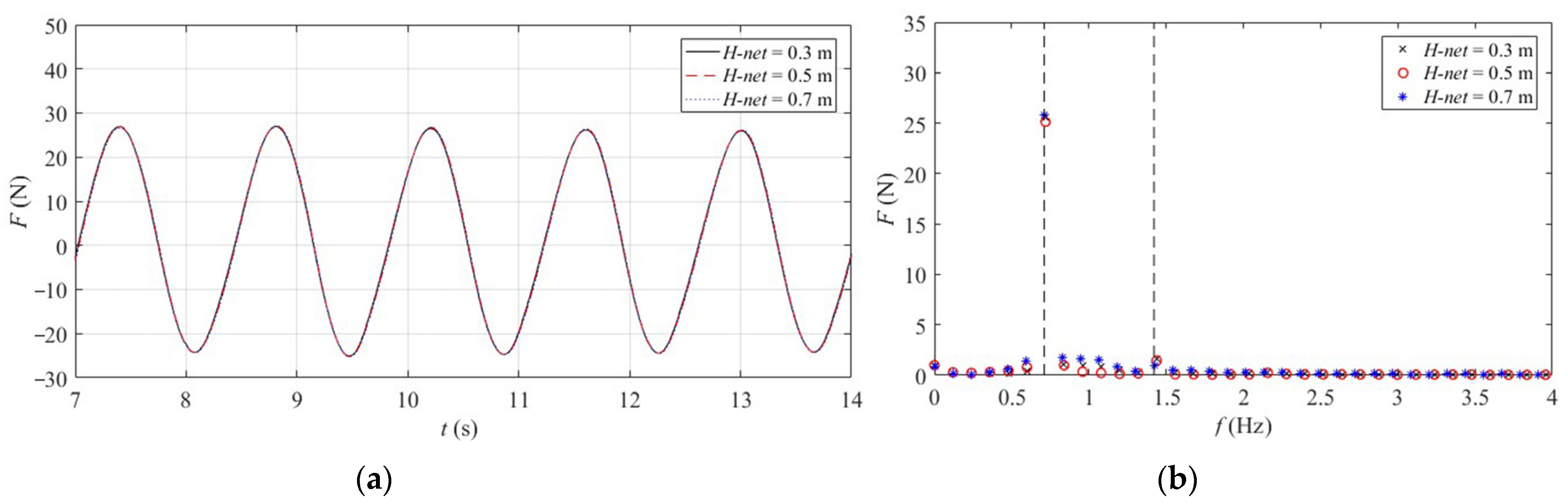
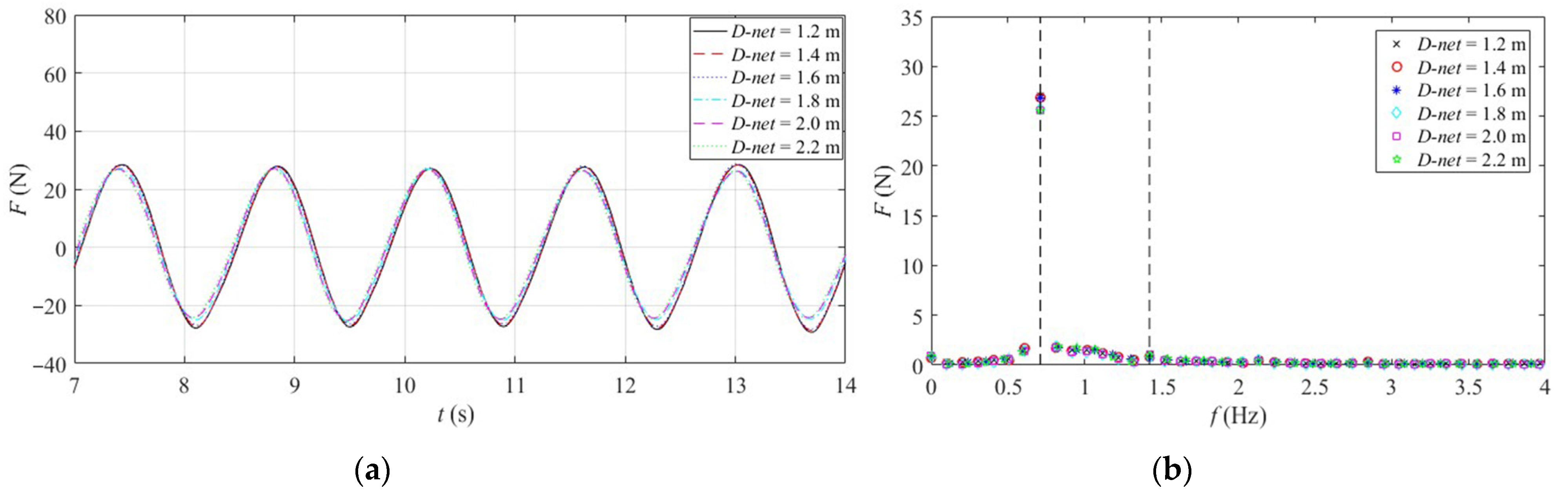
3.2. The Influence of the Geometrical Dimensions of the Cage
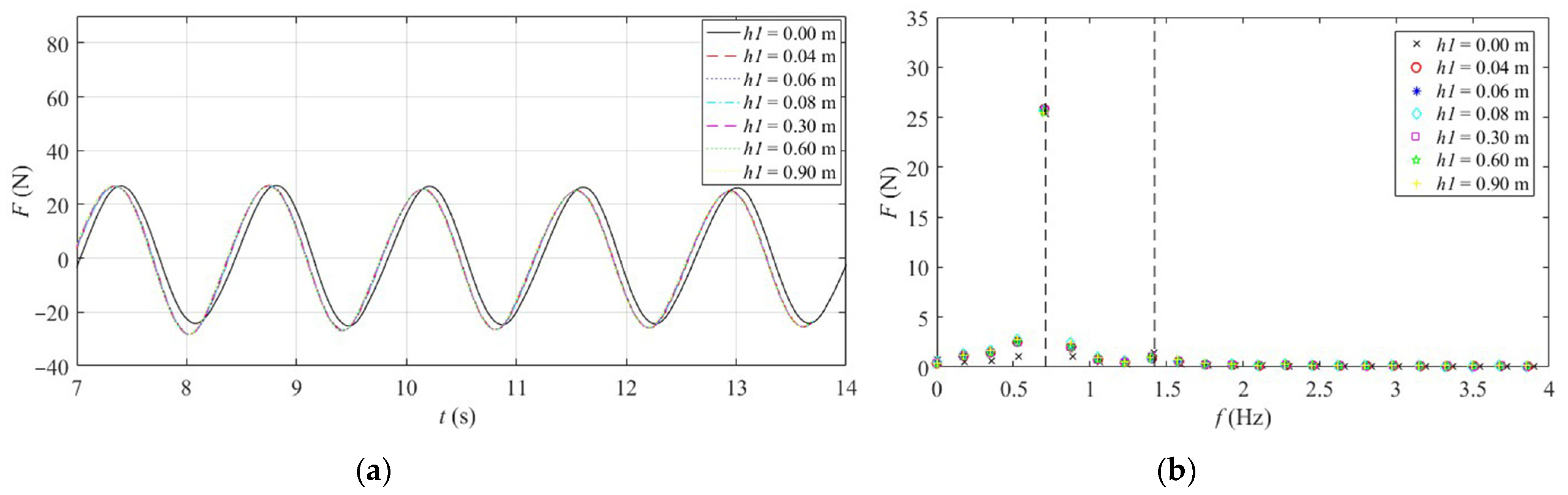
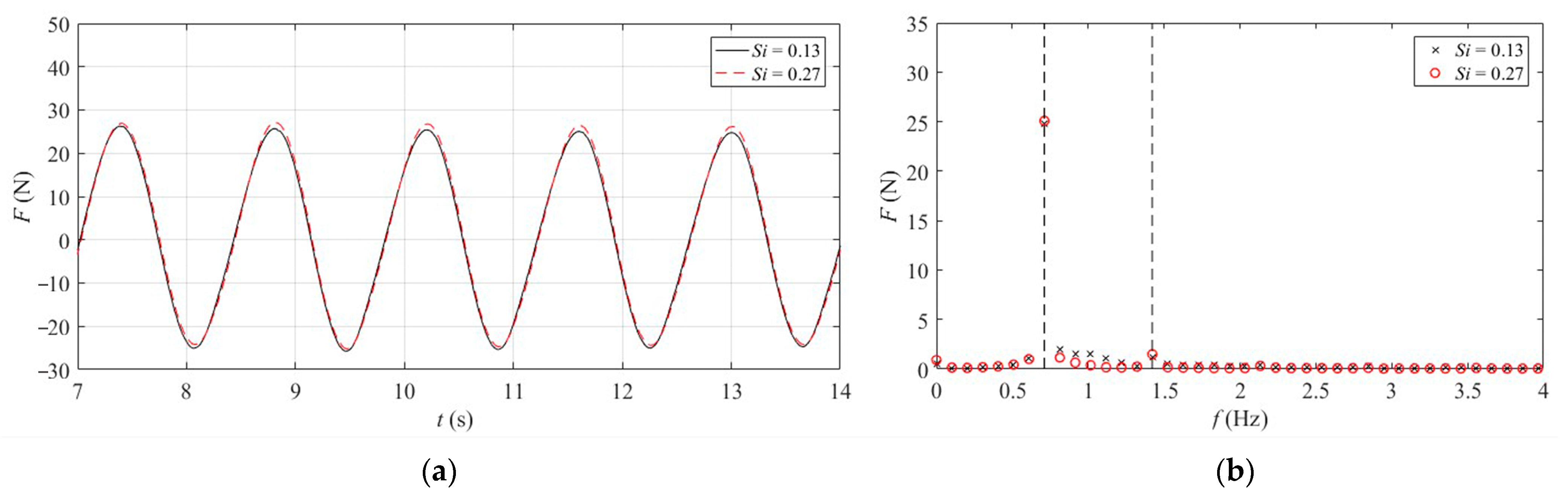
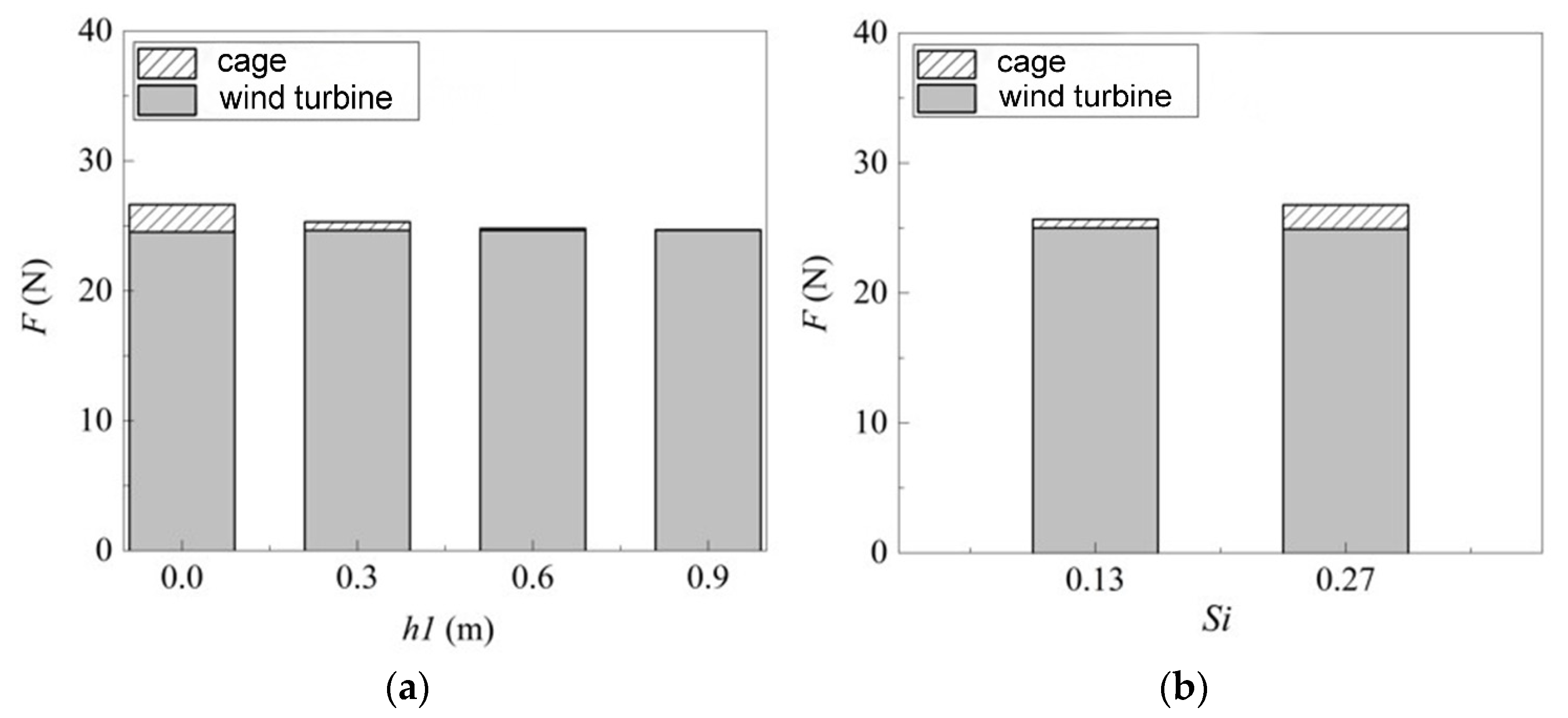
3.3. Other Influencing Factors
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, C.P.; Li, Y.C.; Zhao, Y.P.; Dong, G.H.; Gui, F.K. Numerical analysis on effects of submerged depth of the grid and direction of incident wave on gravity cage. China Ocean Eng. 2009, 23, 233–250. [Google Scholar]
- Qin, L.; Yang, X.; Li, L.; Zhang, P. Design and research of prestressed anchor wind turbine foundation. Appl. Mech. Mater. 2014, 711, 550–553. [Google Scholar] [CrossRef]
- Ram, S.; Mohana, R. Simulation and numerical analysis of offshore wind turbine with monopile foundation. IOP Conf. Ser. Mater. Sci. Eng. 2020, 872, 012046. [Google Scholar]
- Oyeniran, A.; Aziaka, D. Residual stress consideration in fatigue damage of offshore wind turbine monopiles: To be or not to be? Int. J. Mech. 2020, 10, 39–52. [Google Scholar] [CrossRef] [Green Version]
- Shirzadeh, R.; Devriendt, C.; Bidakhvidi, M.A.; Guillaume, P. Experimental and computational damping estimation of an offshore wind turbine on a monopile foundation. J. Wind Eng. Ind. Aerodyn. 2013, 120, 96–106. [Google Scholar] [CrossRef]
- Hu, Y.; Yang, J.; Baniotopoulos, C.; Wang, X. Dynamic analysis of offshore steel wind turbine towers subjected to wind, wave and current loading during construction. Ocean Eng. 2020, 216, 108084. [Google Scholar] [CrossRef]
- Tempel, J.V.; Diepeveen, N.F.B.; Vries, W.E.; Salzmann, D.C. 15-Offshore environmental loads and wind turbine design: Impact of wind, wave, currents and ice. In Wind Energy Systems; Woodhead Publishing: Shaxton, UK, 2011; pp. 463–478. [Google Scholar]
- Buljac, A.; Kozmar, H.; Yang, W.; Kareem, A. Concurrent wind, wave and current loads on a monopile-supported offshore wind turbine. Eng. Struct. 2022, 255, 113950.1–113950.17. [Google Scholar] [CrossRef]
- Barj, L.; Jonkman, J.M.; Robertson, A.; Stewart, G.M.; Stewart, S.W. Wind/wave misalignment in the loads analysis of a floating offshore wind turbine. In Proceedings of the 32nd ASME Wind Energy Symposium, National Harbor, MD, USA, 13–17 January 2014. [Google Scholar]
- Wei, K.; Arwade, S.R.; Myers, A.T.; Valamanesh, V.; Pang, W. Effect of wind and wave directionality on the structural performance of non-operational offshore wind turbines supported by jackets during hurricanes. Wind Energy 2017, 20, 289–303. [Google Scholar] [CrossRef]
- Peng, Z. Wave slamming impact on offshore wind turbine foundations. Coast. Eng. Proc. 2014, 1, 43. [Google Scholar] [CrossRef] [Green Version]
- Paulsen, B.T.; Sonneville, B.D.; Michiel, V.; Jacobsena, N.G. Probability of wave slamming and the magnitude of slamming loads on offshore wind turbine foundations. Coast. Eng. 2019, 143, 76–95. [Google Scholar] [CrossRef]
- Zhang, P.; Li, Y.; Gu, J.; Yin, T.; Hu, Z.; Tang, Y. Dynamic response of a conceptual designed articulated offshore wind turbine. J. Offshore Mech. Arct. Eng. Apr. 2021, 143, 024501. [Google Scholar] [CrossRef]
- Zhang, P.; Yang, S.; Li, Y.; Gu, J.; Hu, Z.; Zhang, R.; Tang, Y. Dynamic response of articulated offshore wind turbines under different water depths. Energies 2020, 13, 2784. [Google Scholar] [CrossRef]
- Wandji, W.N.; Natarajan, A.; Dimitrov, N. Development and design of a semi-floater substructure for multi-megawatt wind turbines at 50+m water depths. Ocean Eng. 2016, 125, 226–237. [Google Scholar] [CrossRef]
- Mazarakos, T.; Konispoliatis, D.N.; Manolas, D.I.; Voutsinas, S.G.; Mavrakos, S.A. Modelling of an offshore multi–purpose floating structure supporting a wind turbine including second–order wave loads. In Proceedings of the 11th European Wave and Tidal Energy Conference Series (11th EWTEC), Nantes, France, 6–11 September 2015. [Google Scholar]
- Lim, S.; Tao, L. Analysis of octagonal pile supporting offshore wind turbines under wave loads. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Busan, Republic of Korea, 15–20 June 2014. [Google Scholar]
- Sheng, J.; Chen, S. Fatigue load simulation for foundation design of offshore wind turbines due to combined wind and wave loading. In Proceeding of 2010 World Non-Grid-Connected Wind Power and Energy Conference, Nanjing, China, 5–7 November 2010. [Google Scholar]
- Lee, C.W.; Kim, Y.B.; Lee, G.H.; Choe, M.Y.; Lee, M.K.; Koo, K.Y. Dynamic simulation of a fish cage system subjected to currents and waves. Ocean Eng. 2008, 35, 1521–1532. [Google Scholar] [CrossRef]
- Cui, Y.; Guan, C.T.; Wan, R.; Huang, B.; Li, J. Numerical simulation of a flatfish cage system in waves and currents. Aquacult. Eng. 2013, 56, 26–33. [Google Scholar] [CrossRef]
- Dong, G.; Xu, T.; Zhao, Y.; Li, Y.; Gui, F. Numerical simulation of hydrodynamic behavior of gravity cage in irregular waves. Aquacult. Eng. 2010, 42, 90–101. [Google Scholar] [CrossRef]
- Kristiansen, T.; Faltinsen, O.M. Experimental and numerical study of an aquaculture net cage with floater in waves and current. J. Fluid Struct. 2015, 54, 1–26. [Google Scholar] [CrossRef] [Green Version]
- Tang, H.; Yang, R.; Yao, H. Experimental and numerical investigations of a mooring line failure of an aquaculture net cage subjected to currents. Ocean Eng. 2021, 238, 109707. [Google Scholar] [CrossRef]
- Yang, R.Y.; Tang, H.; Huang, C. Numerical modeling of the mooring system failure of an aquaculture net cage system under waves and currents. IEEE J. Ocean. Eng. 2019, 45, 1396–1410. [Google Scholar] [CrossRef]
- Xu, T.J.; Hou, H.M.; Dong, G.H.; Zhao, Y.P. Structural analysis of float collar for metal fish cage in waves. Turk. J. Fish. Aquat. Sci. 2017, 17, 257–268. [Google Scholar]
- Xu, T.J.; Dong, G.H.; Tang, M.F.; Liu, J.; Guo, W.J. Experimental analysis of hydrodynamic forces on net panel in extreme waves. Appl. Ocean Res. 2021, 107, 102495. [Google Scholar] [CrossRef]
- Zhao, Y.P.; Chen, Q.P.; Bi, C.W.; Cui, Y. Experimental investigation on hydrodynamic coefficients of a column-stabilized fish cage in waves. J. Mar. Sci. Eng. 2019, 7, 418. [Google Scholar] [CrossRef] [Green Version]
- Lader, P.F.; Fredheim, A. Dynamic properties of a flexible net sheet in waves and current—A numerical approach. Aquacult. Eng. 2006, 35, 228–238. [Google Scholar] [CrossRef]
- Huang, X.H.; Guo, G.X.; Tao, Q.Y.; Hu, Y.; Liu, H.Y.; Wang, S.M.; Hao, S.H. Dynamic deformation of the floating collar of a net cage under the combined effect of waves and current. Aquacult. Eng. 2018, 83, 47–56. [Google Scholar] [CrossRef]
- Cifuentes, C.; Kim, M.H. Hydrodynamic response of a cage system under waves and currents using a Morison-force model. Ocean Eng. 2017, 141, 283–294. [Google Scholar] [CrossRef]
- Shainee, M.; DeCew, J.; Leira, B.J.; Ellingsen, H.; Fredheim, A. Numerical simulation of a self-submersible SPM cage system in regular waves with following currents. Aquacult. Eng. 2013, 54, 29–37. [Google Scholar] [CrossRef]
- Shainee, M.; Leira, B.J.; Ellingsen, H.; Fredheim, A. Investigation of a self-submersible spm cage system in random waves. Aquacult. Eng. 2014, 58, 35–44. [Google Scholar] [CrossRef]
- Ma, M.Y.; Zhang, H.; Jeng, D.S.; Wang, C.M. Hydroelastic interactions between waves and an array of submersible flexible fish cages. Ocean Eng. 2022, 266, 113035. [Google Scholar] [CrossRef]
- Liu, H.Y.; Huang, X.H.; Pang, G.L.; Yuan, T.P.; Hu, Y.; Yuan, S. Structural mechanical properties of circular fish cages determined by finite element analysis and material test. Ocean Eng. 2022, 261, 112083. [Google Scholar] [CrossRef]
- Mjåtveit, M.A.; Cheng, H.; Ong, M.C.; Lee, J. Comparative study of circular and square gravity-based fish cages with different dimensions under pure current conditions. Aquacult. Eng. 2022, 96, 102223. [Google Scholar] [CrossRef]
- Cheng, H.; Li, L.; Ong, M.C. Comparative study of five commonly used gravity type fish cages under pure current conditions. Ocean Eng. 2022, 250, 110977. [Google Scholar] [CrossRef]
- Wang, Y.H.; Fu, S.X.; Xu, Y.W.; Li, S.; Moan, T. Loads on a vessel-shaped fish cage steel structures, nets and connectors considering the effects of diffraction and radiation waves. Mar. Struct. 2022, 86, 103301. [Google Scholar] [CrossRef]
- Stokes, G.G. On the theories of the internal friction of fluids in motion and of the equilibrium and motion of elastic solids. Trans. Camb. Philos. Soc. 1845, 8, 287–319. [Google Scholar]
- Bi, C.W.; Zhao, Y.P.; Dong, G.H.; Cui, Y.; Gui, F.K. Experimental and numerical investigation on the damping effect of net cages in waves. J. Fluid Struct. 2015, 55, 122–138. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Wave Height (m) | Period (s) | Water Depth (m) | Wave Steepness | Submergence Depth (m) |
|---|---|---|---|---|---|
| 1 | 0.10 | 1.4 | 1.0 | 0.034 | 0 |
| 2 | 0.12 | 1.4 | 1.0 | 0.040 | 0 |
| 3 | 0.14 | 1.4 | 1.0 | 0.047 | 0 |
| 4 | 0.12 | 1.2 | 1.0 | 0.054 | 0 |
| 5 | 0.12 | 1.6 | 1.0 | 0.032 | 0 |
| 6 | 0.12 | 1.4 | 1.4 | 0.039 | 0 |
| 7 | 0.12 | 1.4 | 1.8 | 0.039 | 0 |
| Case No. | Wind Turbine Foundation Load (N) | Cage Load (N) | Proportion of Wind Turbine Load | |
|---|---|---|---|---|
| Different wave heights | 1 | 20.70 | 1.56 | 94% |
| 2 | 24.00 | 2.43 | 91.53% | |
| 3 | 27.90 | 3.72 | 88.6% | |
| Different periods | 4 | 26.91 | 3.42 | 88.72% |
| 2 | 24.91 | 2.08 | 92.29% | |
| 5 | 27.07 | 6.99 | 79.48% | |
| Different water depths | 2 | 24.91 | 1.86 | 93.05% |
| 6 | 26.42 | 1.95 | 93.13% | |
| 7 | 26.65 | 1.86 | 93.48% |
| Case No. | Height of Cage (m) | Diameter of Cage (m) | Density of Cage | Submergence Depth (m) |
|---|---|---|---|---|
| 8 | 0.3 | 2.0 | 0.27 | 0 |
| 9 | 0.5 | 2.0 | 0.27 | 0 |
| 10 | 0.7 | 2.0 | 0.27 | 0 |
| 11 | 0.5 | 1.2 | 0.27 | 0 |
| 12 | 0.5 | 1.4 | 0.27 | 0 |
| 13 | 0.5 | 1.6 | 0.27 | 0 |
| 14 | 0.5 | 1.8 | 0.27 | 0 |
| 15 | 0.5 | 2.2 | 0.27 | 0 |
| Case No. | Wind Turbine Foundation Load (N) | Cage Load (N) | Proportion of Wind Turbine Load | |
|---|---|---|---|---|
| Different cage heights | 8 | 24.97 | 1.80 | 93.28% |
| 9 | 24.91 | 2.08 | 92.67% | |
| 10 | 24.94 | 2.45 | 91.06% | |
| Different cage diameters | 11 | 26.51 | 6.54 | 80.21% |
| 12 | 26.22 | 6.40 | 80.38% | |
| 13 | 26.29 | 5.25 | 83.35% | |
| 14 | 24.63 | 3.15 | 88.67% | |
| 9 | 24.91 | 2.08 | 91.18% | |
| 15 | 25.16 | 1.70 | 93.67% |
| Case No. | Height of Cage (m) | Diameter of Cage (m) | Solidity of Cage | Submergence Depth (m) |
|---|---|---|---|---|
| 16 | 0.5 | 2.0 | 0.27 | 0.00 |
| 17 | 0.5 | 2.0 | 0.27 | 0.04 |
| 18 | 0.5 | 2.0 | 0.27 | 0.06 |
| 19 | 0.5 | 2.0 | 0.27 | 0.08 |
| 20 | 0.5 | 2.0 | 0.27 | 0.30 |
| 21 | 0.5 | 2.0 | 0.27 | 0.60 |
| 22 | 0.5 | 2.0 | 0.27 | 0.90 |
| 23 | 0.5 | 2.0 | 0.13 | 0.00 |
| Case No. | Wind Turbine Foundation Load (N) | Cage Load (N) | Proportion of Wind Turbine Load | |
|---|---|---|---|---|
| Different submergence depths | 16 | 24.91 | 1.86 | 93.05% |
| 17 | 26.66 | 1.67 | 94.11% | |
| 18 | 26.62 | 1.59 | 94.36% | |
| 19 | 26.71 | 1.45 | 94.85% | |
| 20 | 26.74 | 0.81 | 97.05% | |
| 21 | 26.72 | 0.17 | 99.36% | |
| 22 | 26.68 | 0.06 | 99.78% | |
| Different plugging rates | 1 | 24.99 | 0.68 | 97.35% |
| 3 | 24.91 | 1.86 | 93.05% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Z.; Yu, W.; Xu, T. Study of the Interaction between Regular Waves and a Wind-Fish Combined Structure. Appl. Sci. 2023, 13, 3103. https://doi.org/10.3390/app13053103
Zhao Z, Yu W, Xu T. Study of the Interaction between Regular Waves and a Wind-Fish Combined Structure. Applied Sciences. 2023; 13(5):3103. https://doi.org/10.3390/app13053103
Chicago/Turabian StyleZhao, Zilong, Wenzhi Yu, and Tiaojian Xu. 2023. "Study of the Interaction between Regular Waves and a Wind-Fish Combined Structure" Applied Sciences 13, no. 5: 3103. https://doi.org/10.3390/app13053103