
A Novel Fault Diagnosis of a Rolling Bearing Method Based on Variational Mode Decomposition and an Artificial Neural Network


Abstract
:1. Introduction
2. Fault Diagnosis of Rolling Bearing Based on VMD and ANN
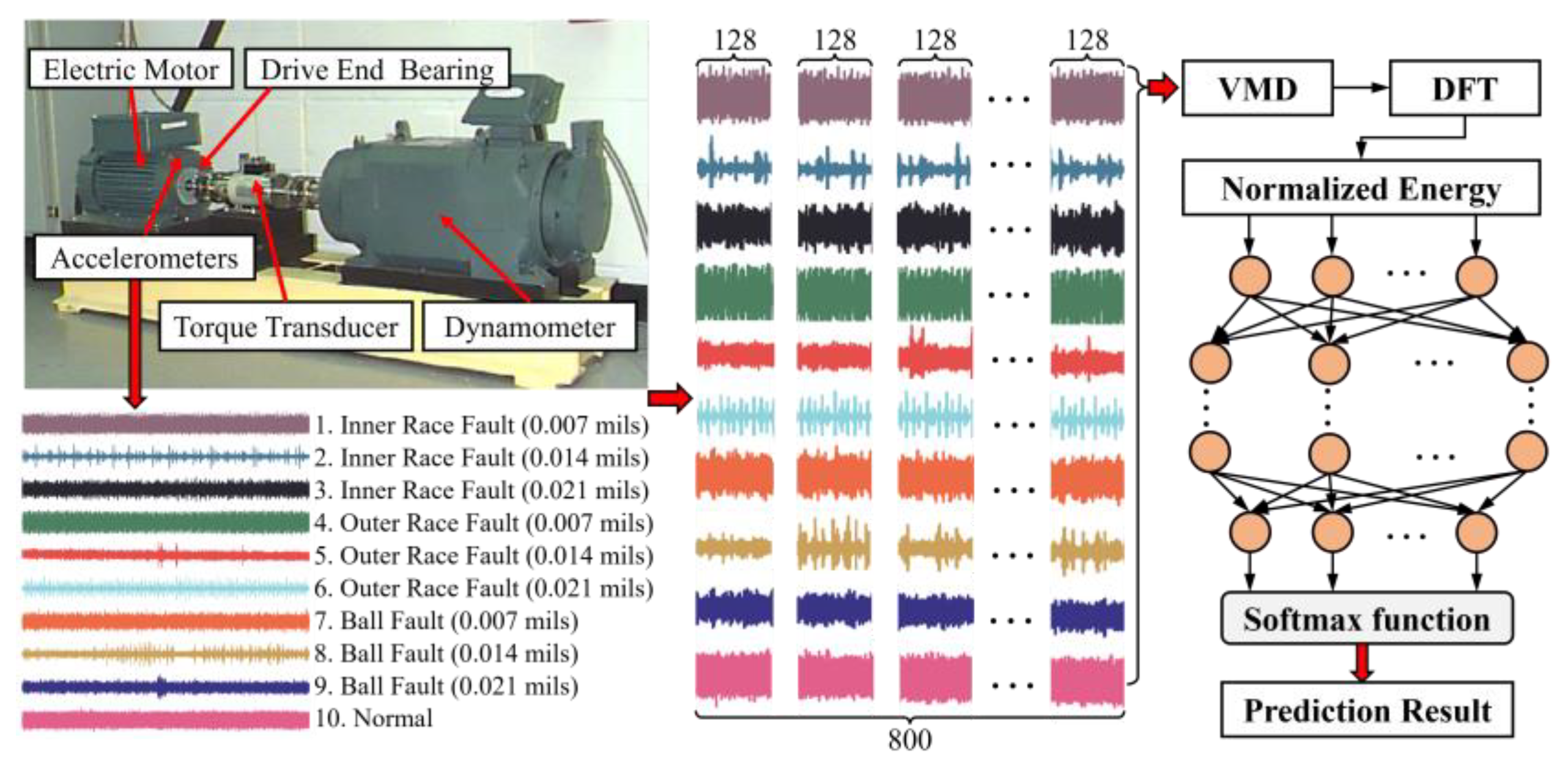
2.1. Data Preprocessing
2.2. Feature Extraction Based on VMD
2.3. Architecture of the Artificial Neural Network
2.4. Fault Diagnosis Experiment and Analysis of Rolling Bearings
3. Results and Discussion
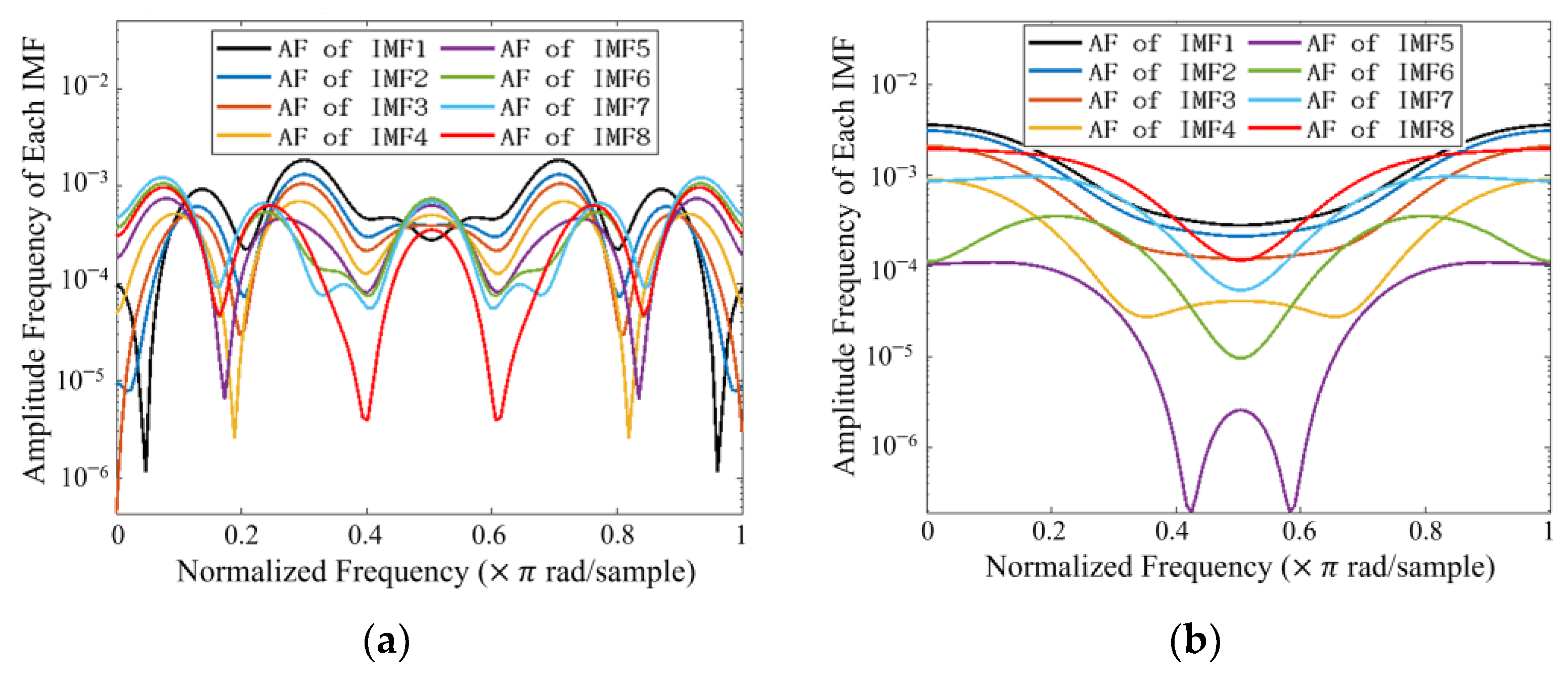
3.1. Comparison of the Feature Extraction Methods
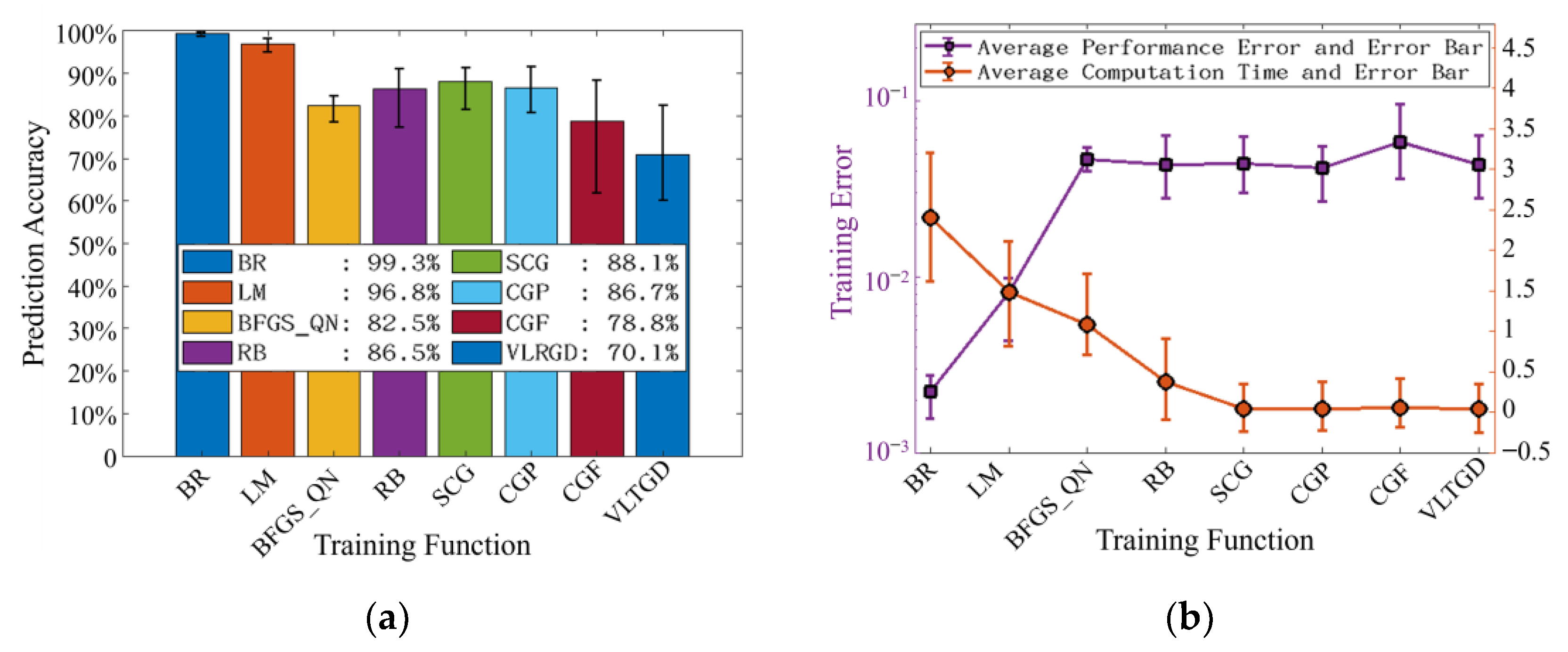
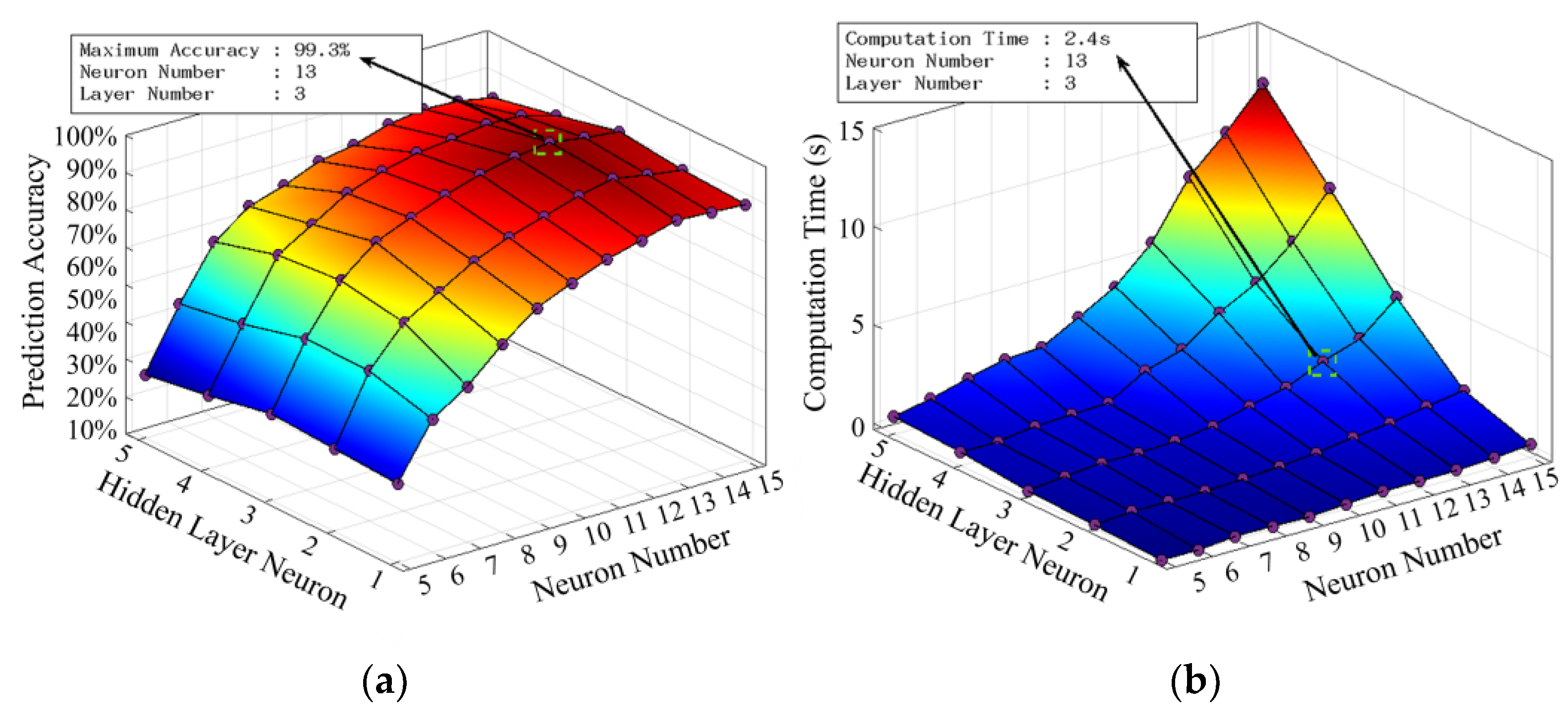
3.2. Determination of the Neural Network Architecture
3.3. Comparison between the Proposed Method and Several Artificial Intelligence Algorithms
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ANN | Artificial Neural Network |
| VMD | Variational Mode Decomposition |
| EMD | Empirical Mode Decomposition |
| IMFs | Intrinsic Mode Functions |
| CNN | Convolutional Neural Network |
| LSTM | Long Short-Term Memory |
| SVM | Support Vector Machine |
| NN | Nearest Neighbor |
| RF | Radom Forest |
| AF | Amplitude Frequency |
| DFT | Discrete Fourier Transform |
| x(t): | Raw Vibration Signal of the Bearing |
| IMFs | |
| Mode Phase | |
| Envelope | |
| central Frequency | |
| Lagrangian Coefficients | |
| Scale Factor | |
| Fermi–Dirac Distribution | |
| 2-Norm | |
| Inner Product | |
| Amplitude Frequency of Each IMF | |
| E | Energy |
| Normalized Energy Eigenvector |
References
- Xie, K.; Liu, L.-C.; Li, X.-P.; Zhang, H.-L. Non-contact resistance and capacitance on-line measurement of lubrication oil film in rolling element bearing employing an electric field coupling method. Measurement 2016, 91, 606–612. [Google Scholar] [CrossRef]
- Ruan, D.; Wang, J.; Yan, J.; Gühmann, C. CNN parameter design based on fault signal analysis and its application in bearing fault diagnosis. Adv. Eng. Inform. 2023, 55, 101877. [Google Scholar] [CrossRef]
- Wang, X.; Mao, D.X.; Li, X.D. Bearing fault diagnosis based on vibro-acoustic data fusion and 1D-CNN network. Measurement 2021, 173, 108518. [Google Scholar] [CrossRef]
- Zhao, B.X.; Qi, Y. Improved generative adversarial network for vibration-based fault diagnosis with imbalanced data. Measurement 2021, 169, 108522. [Google Scholar] [CrossRef]
- Chen, T.Y.; Wang, Z.H.; Yang, X.; Jiang, K. A deep capsule neural network with stochastic delta rule for bearing fault diagnosis on raw vibration signals. Measurement 2019, 148, 106857. [Google Scholar] [CrossRef]
- Xie, T.; Xu, Q.; Jiang, C.; Lu, S.; Wang, X. The fault frequency priors fusion deep learning framework with application to fault diagnosis of offshore wind turbines. Renew. Energy 2023, 202, 606–612. [Google Scholar] [CrossRef]
- Yu, X.; Liang, Z.; Wang, Y.; Yin, H.; Liu, X.; Yu, W.; Huang, Y. A wavelet packet transform-based deep feature transfer learning method for bearing fault diagnosis under different working conditions. Measurement 2022, 201, 111597. [Google Scholar] [CrossRef]
- Li, X.; Jiang, H.; Xie, M.; Wang, T.; Wang, R.; Wu, Z. A reinforcement ensemble deep transfer learning network for rolling bearing fault diagnosis with Multi-source domains. Adv. Eng. Inform. 2022, 51, 101480. [Google Scholar] [CrossRef]
- Dong, X.; Li, G.L.; Jia, Y.H.; Xu, K. Multiscale feature extraction from the perspective of graph for hob fault diagnosis using spectral graph wavelet transform combined with improved random forest. Measurement 2021, 176, 109178. [Google Scholar] [CrossRef]
- Wei, J.; Huang, H.; Yao, L.; Hu, Y.; Fan, Q.; Huang, D. New imbalanced bearing fault diagnosis method based on Sample-characteristic Oversampling TechniquE (SCOTE) and multi-class LS-SVM. Appl. Soft. Comput. 2021, 101, 107043. [Google Scholar] [CrossRef]
- Kumar, R.S.; Raj, I.G.C.; Alhamrouni, I.; Saravanan, S.; Prabaharan, N.; Ishwarya, S.; Gokdag, M.; Salem, M. A combined HT and ANN based early broken bar fault diagnosis approach for IFOC fed induction motor drive. Alex. Eng. J. 2023, 66, 15–30. [Google Scholar] [CrossRef]
- Su, Z.A.; Tang, B.P.; Ma, J.H.; Deng, L. Fault diagnosis method based on incremental enhanced supervised locally linear embedding and adaptive nearest neighbor classifier. Measurement 2014, 48, 136–148. [Google Scholar] [CrossRef]
- Samanta, B.; Al-Balushi, K.R.; Al-Araimi, S.A. Artificial neural networks and genetic algorithm for bearing fault detection. Soft Comput. 2006, 10, 264–271. [Google Scholar] [CrossRef]
- Kerboua, A.; Kelailia, R.; Metatla, A.; Batouche, M. Fault diagnosis in induction motor using pattern recognition and neural networks. In Proceedings of the 2018 International Conference on Signal, Image, Vision and their Applications (SIVA), Guelma, Algeria, 26–27 November 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Sepulveda, N.E.; Sinha, J. Parameter optimisation in the vibration-based machine learning model for accurate and reliable faults diagnosis in rotating machines. Machines 2020, 8, 66. [Google Scholar] [CrossRef]
- Cao, R.F.; Kaltungo, A.Y. An automated data fusion-based gear faults classification framework in rotating machines. Sensors 2021, 21, 2957. [Google Scholar] [CrossRef]
- Monteiro, R.d.P.; Marra, A.L.; Vidoni, R.; Garcia, C.; Concli, F. A hybrid finite element method–analytical model for classifying the effects of cracks on gear train systems using artificial neural networks. Appl. Sci. 2022, 12, 7814. [Google Scholar] [CrossRef]
- Toma, R.N.; Gao, Y.; Piltan, F.; Im, K.; Shon, D.; Yoon, T.H.; Yoo, D.-S.; Kim, J.-M. Classification framework of the bearing faults of an induction motor using wavelet scattering transform-based features. Sensors 2022, 22, 8958. [Google Scholar] [CrossRef]
- Tayyab, S.M.; Chatterton, S.; Pennacchi, P. Fault Detection and severity level edentification of spiral bevel gears under different operating conditions using artificial intelligence techniques. Machines 2021, 9, 173. [Google Scholar] [CrossRef]
- El Idrissi, A.; Derouich, A.; Mahfoud, S.; El Ouanjli, N.; Chantoufi, A.; Al-Sumaiti, A.S.; Mossa, M.A. Bearing fault diagnosis for an induction motor controlled by an artificial neural network—Direct torque control using the Hilbert transform. Mathmatics 2021, 10, 42588. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2014, 22, 531–534. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1998, 454, 154–196. [Google Scholar] [CrossRef]
- Wang, X.L.; Shi, J.C.; Zhang, J. A power information guided-variational mode decomposition (PIVMD) and its application to fault diagnosis of rolling bearing. Digit. Signal Process. 2022, 132, 103814. [Google Scholar] [CrossRef]
- Yi, C.; Wang, H.; Ran, L.; Zhou, L.; Lin, J.H. Power spectral density-guided variational mode decomposition for the compound fault diagnosis of rolling bearings. Measurement 2022, 199, 111494. [Google Scholar] [CrossRef]
- Zhang, Q.; Ma, W.H.; Li, G.L.; Ding, J.J.; Xie, M. Fault diagnosis of power grid based on variational mode decomposition and convolutional neural network. Electr. Pow. Syst. Res. 2022, 208, 107871. [Google Scholar] [CrossRef]
- Geng, Z.Q.; Duan, X.Y.; Han, Y.M.; Liu, F.F. Novel variation mode decomposition integrated adaptive sparse principal component analysis and it application in fault diagnosis. ISA Trans. 2022, 128, 21–31. [Google Scholar] [CrossRef]
- Sharma, V.; Parey, A. Extraction of weak fault transients using variational mode decomposition for fault diagnosis of gearbox under varying speed. Eng. Fail. Anal. 2020, 107, 104204. [Google Scholar] [CrossRef]
- Zhang, Y.-D.; Yang, Z.-J.; Lu, H.-M.; Zhou, X.-X.; Phillips, P.; Liu, Q.-M.; Wang, S.-H. Facial emotion recognition based on biorthogonal wavelet entropy, fuzzy support vector machine, and stratified cross validation. IEEE Access 2016, 4, 8375–8385. [Google Scholar] [CrossRef]
- Li, H.M.; Huang, J.Y.; Ji, S.W. Bearing fault diagnosis with a feature fusion method based on an ensemble convolutional neural network and deep neural network. Sensors 2019, 19, 2034. [Google Scholar] [CrossRef] [Green Version]
- Gao, D.W.; Zhu, Y.S.; Ren, Z.J.; Yan, K.; Kang, W. A novel weak fault diagnosis method for rolling bearings based on LSTM considering quasi-periodicity. Knowledge-Based Syst. 2021, 231, 107413. [Google Scholar] [CrossRef]
- Wang, Q.F.; Wang, S.; Wei, B.K.; Chen, W.W. Weighted K-NN classification method of bearings fault diagnosis with multi-dimensional sensitive features. IEEE Accesss 2021, 9, 45428–45440. [Google Scholar] [CrossRef]
- Lin, S.L. Application of machine learning to a medium gaussian support vector machine in the diagnosis of motor bearing faults. Electronics 2021, 10, 2266. [Google Scholar] [CrossRef]
- Kavathekar, S.; Upadhyay, N.; Kankar, P.K. Fault classification of ball bearing by rotation forest technique. Procedia Technol. 2016, 23, 187–192. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Fault Location | d (mils) | Training Set | Validation Set | Testing Set | Target Label |
|---|---|---|---|---|---|---|
| 1 | Inner Race | 0.007 | 500 | 200 | 100 | [1 0 0 0 0 0 0 0 0 0] |
| 2 | Inner Race | 0.014 | 500 | 200 | 100 | [0 1 0 0 0 0 0 0 0 0] |
| 3 | Inner Race | 0.021 | 500 | 200 | 100 | [0 0 1 0 0 0 0 0 0 0] |
| 4 | Outer Race | 0.007 | 500 | 200 | 100 | [0 0 0 1 0 0 0 0 0 0] |
| 5 | Outer Race | 0.014 | 500 | 200 | 100 | [0 0 0 0 1 0 0 0 0 0] |
| 6 | Outer Race | 0.021 | 500 | 200 | 100 | [0 0 0 0 0 1 0 0 0 0] |
| 7 | Ball | 0.007 | 500 | 200 | 100 | [0 0 0 0 0 0 1 0 0 0] |
| 8 | Ball | 0.014 | 500 | 200 | 100 | [0 0 0 0 0 0 0 1 0 0] |
| 9 | Ball | 0.021 | 500 | 200 | 100 | [0 0 0 0 0 0 0 0 1 0] |
| 10 | Normal | Normal | 500 | 200 | 100 | [0 0 0 0 0 0 0 0 0 1] |
| Number of Samples | 8000 |
| Number of Neuron Nodes in the Input Layer | 8 |
| Number of Hidden Layers | 3 |
| Number of Neuron Nodes in the Hidden Layer | 13 |
| Number of Neuron Nodes in the Output Layer | 10 |
| Activation Function of the Input/Hidden Layers | ReLU |
| Activation Function of the Output Layer | Soft-max |
| Training Function | Bayesian Regularization |
| No. | Layers | Kernel Size | Kernel No. | Stride | Padding | Activation | Output |
|---|---|---|---|---|---|---|---|
| 1 | Conv1D | 20 × 1 | 32 | 8 | 10 | ReLU | 128 × 32 |
| 2 | Max Pooling | 4 × 1 | 32 | 4 | 0 | - | 32 × 32 |
| 3 | Flattening | - | - | - | - | - | 1024 |
| 4 | FC | 100 | 1 | - | - | ReLU | 100 × 1 |
| 5 | Output | 10 | 1 | - | - | Soft-max | 10 |
| No. | Layers | Kernel Size | Kernel No. | Activation | Output |
|---|---|---|---|---|---|
| 1 | LSTM | 1 | 32 | Tanh | 1024 × 32 |
| 2 | Flattening | - | - | - | 32,768 |
| 3 | FC | 32 | 1 | ReLU | 32 × 1 |
| 4 | Output | 10 | 1 | Soft-max | 10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, X.; Yao, J.; Zhang, W.; Wang, Y. A Novel Fault Diagnosis of a Rolling Bearing Method Based on Variational Mode Decomposition and an Artificial Neural Network. Appl. Sci. 2023, 13, 3413. https://doi.org/10.3390/app13063413
Liang X, Yao J, Zhang W, Wang Y. A Novel Fault Diagnosis of a Rolling Bearing Method Based on Variational Mode Decomposition and an Artificial Neural Network. Applied Sciences. 2023; 13(6):3413. https://doi.org/10.3390/app13063413
Chicago/Turabian StyleLiang, Xiaobei, Jinyong Yao, Weifang Zhang, and Yanrong Wang. 2023. "A Novel Fault Diagnosis of a Rolling Bearing Method Based on Variational Mode Decomposition and an Artificial Neural Network" Applied Sciences 13, no. 6: 3413. https://doi.org/10.3390/app13063413