
Improvement of Braking Response Performance of Fault-Tolerant Dual Winding Motor for Integrated Brake System Using Winding Switching


Abstract
:1. Introduction
- (1)
- The proposed DWM with WS considers both the overheating problem in the faulty mode and the performance degradation problem of IEB system in the normal mode.
- (2)
- In order to minimize the development cost, the DWM with WS was developed utilizing the previously developed base model.
- (3)
- The proposed DWM with WS was effectively applied to the IEB system. In addition, the scope of various other DWM-based applications can be expanded.
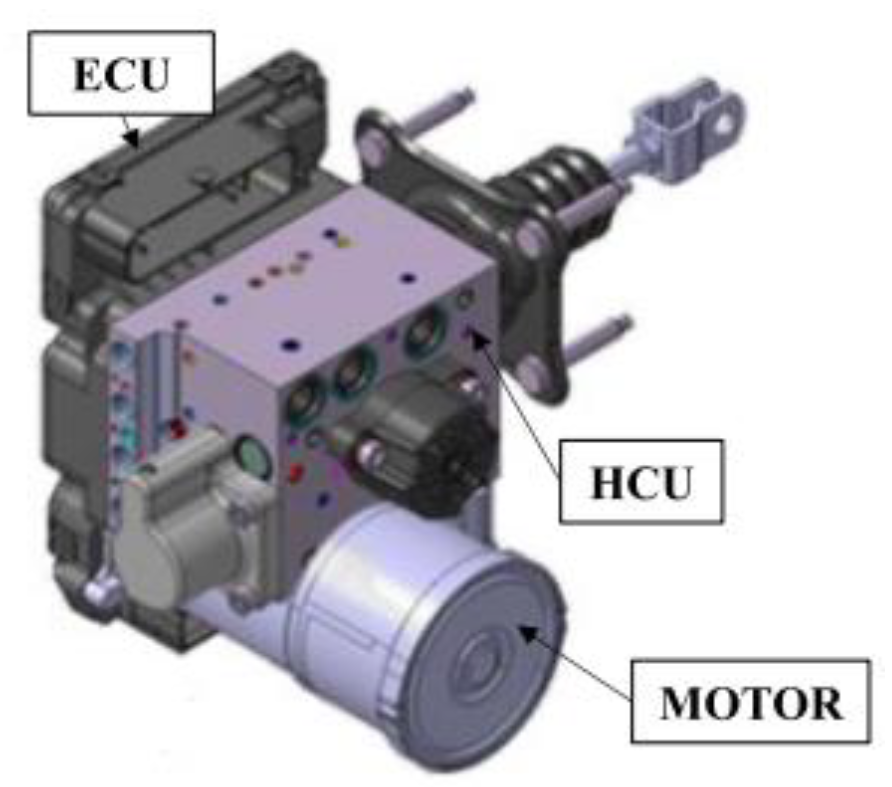
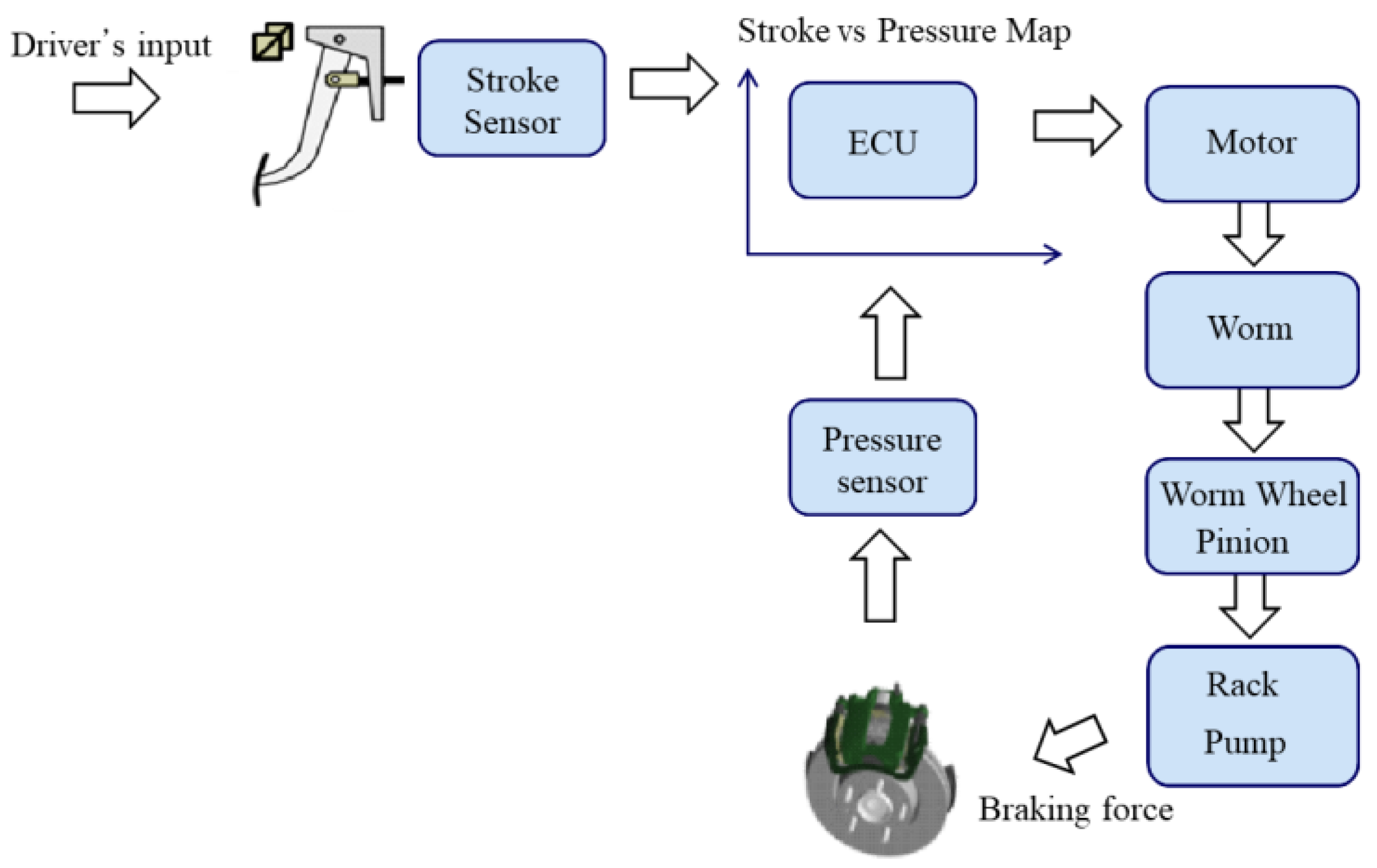
2. Integrated Electric Brake System
3. Dual Winding Motor
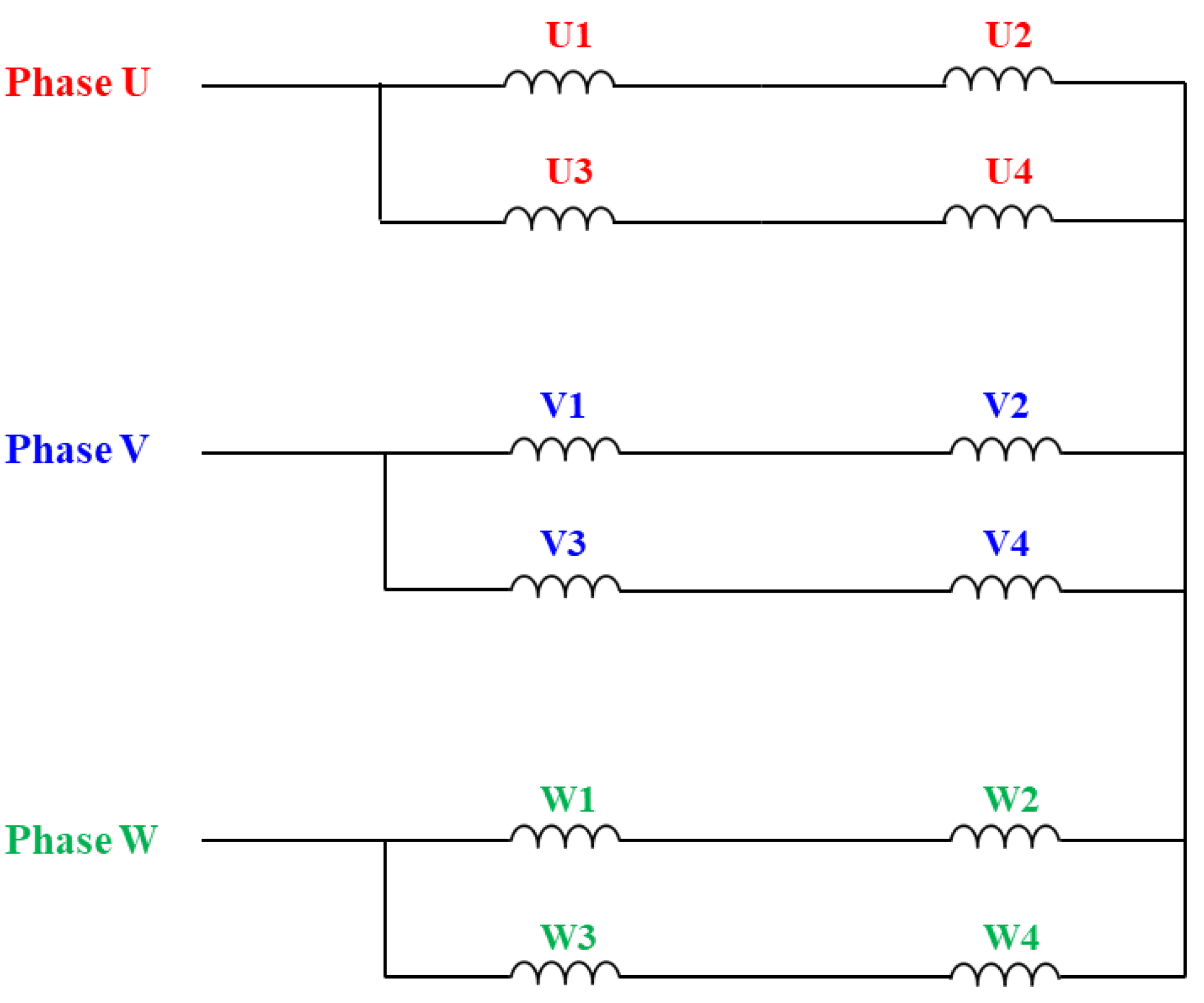
3.1. Conventional Dual Winding Motor
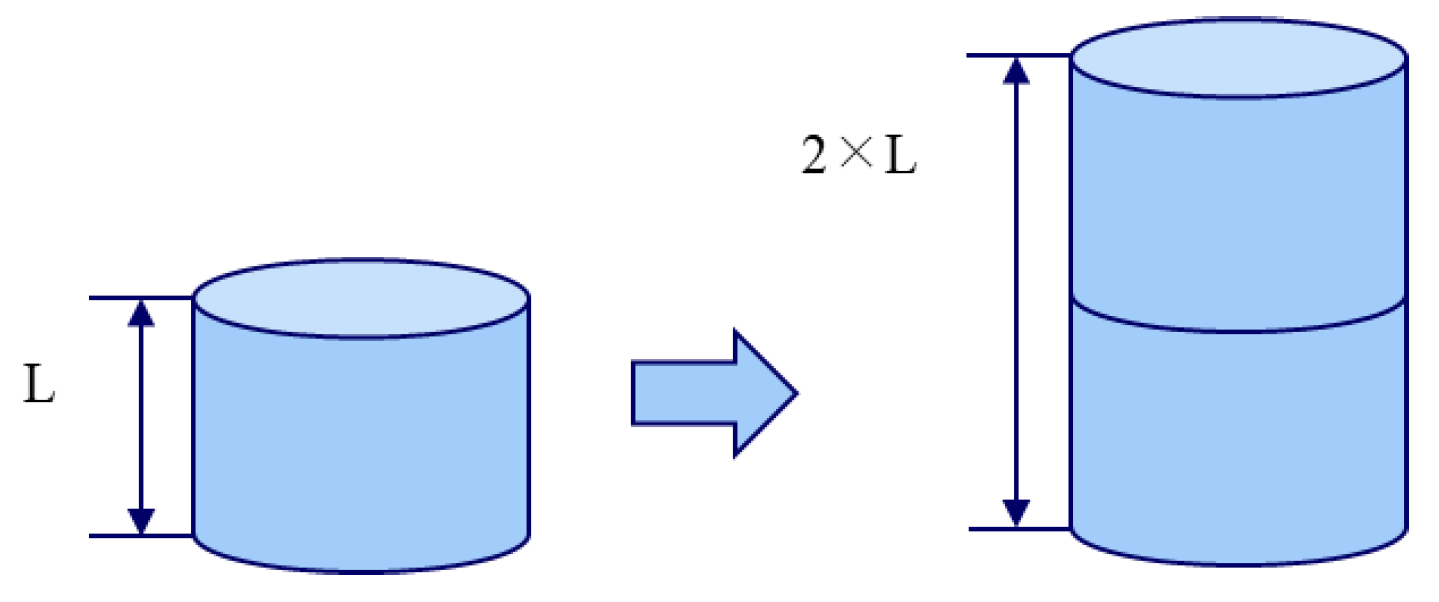
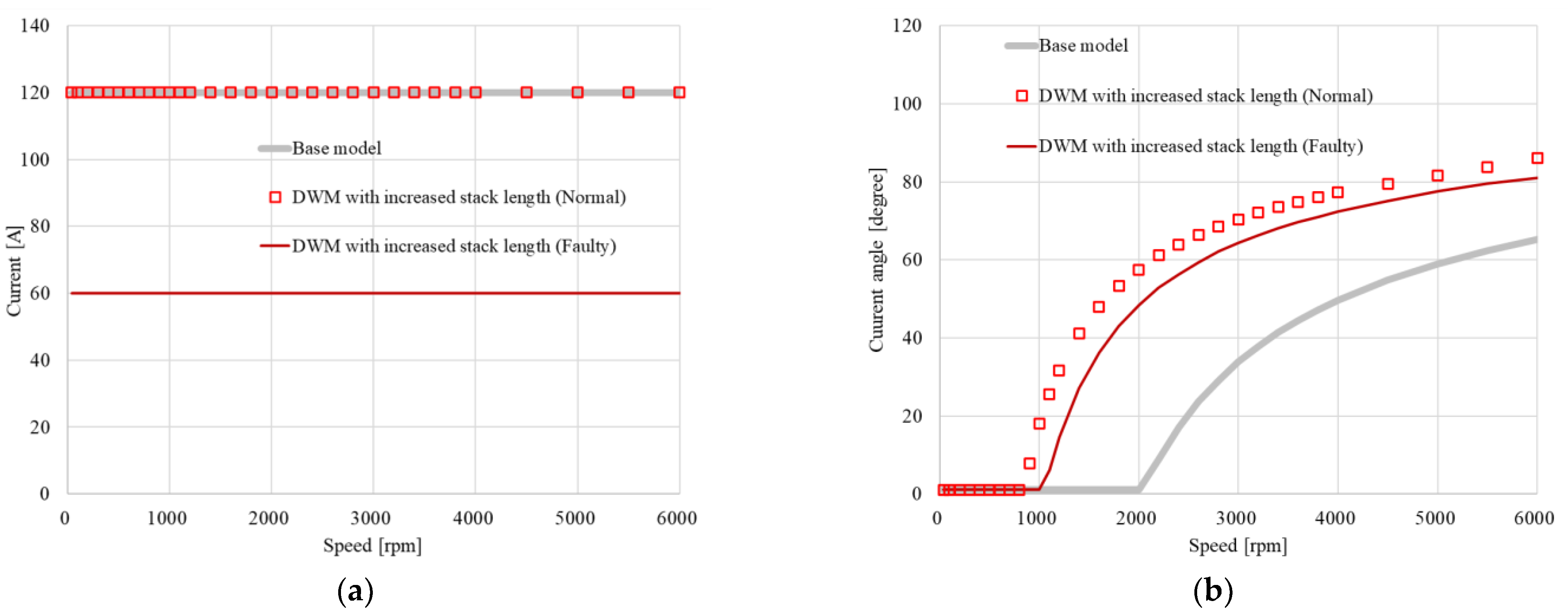
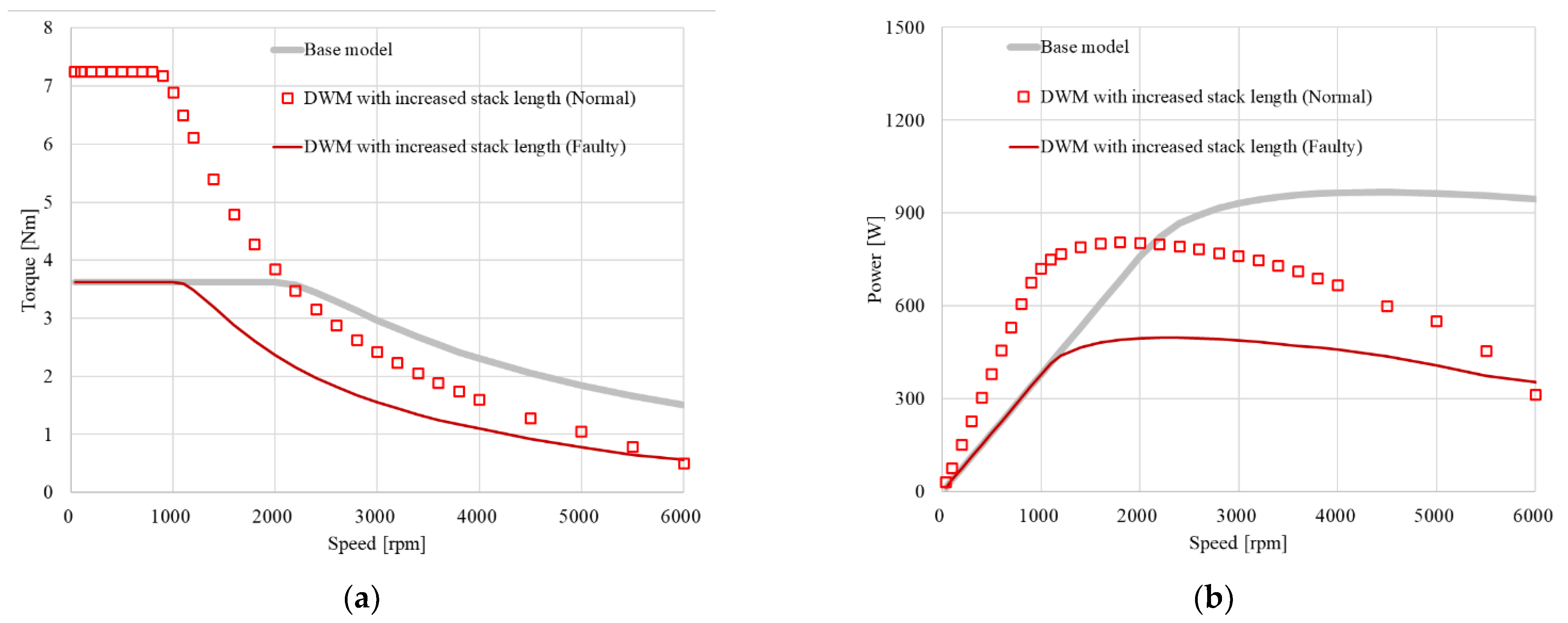
3.2. DWM with an Increased Stack Length
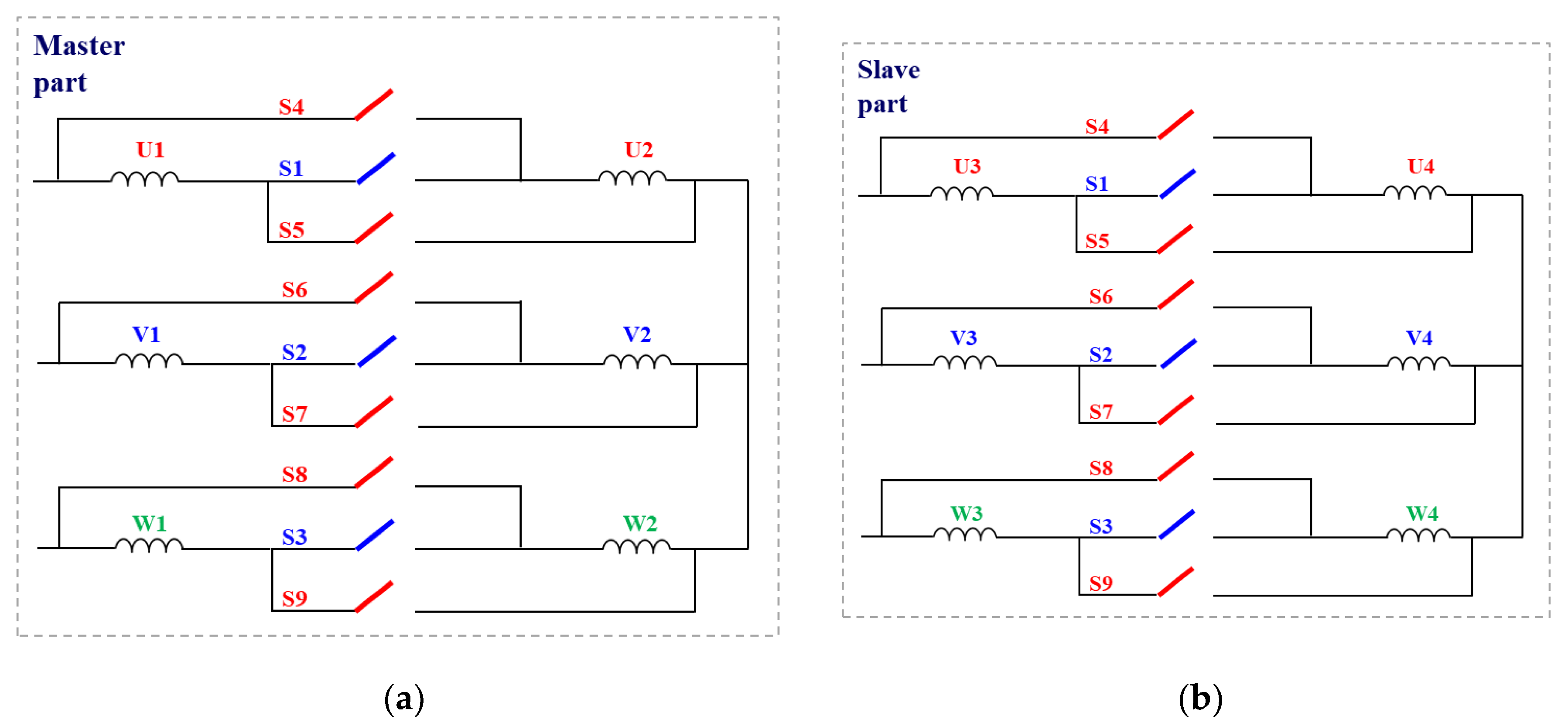
4. Proposed Dual Winding Motor with Winding Switching
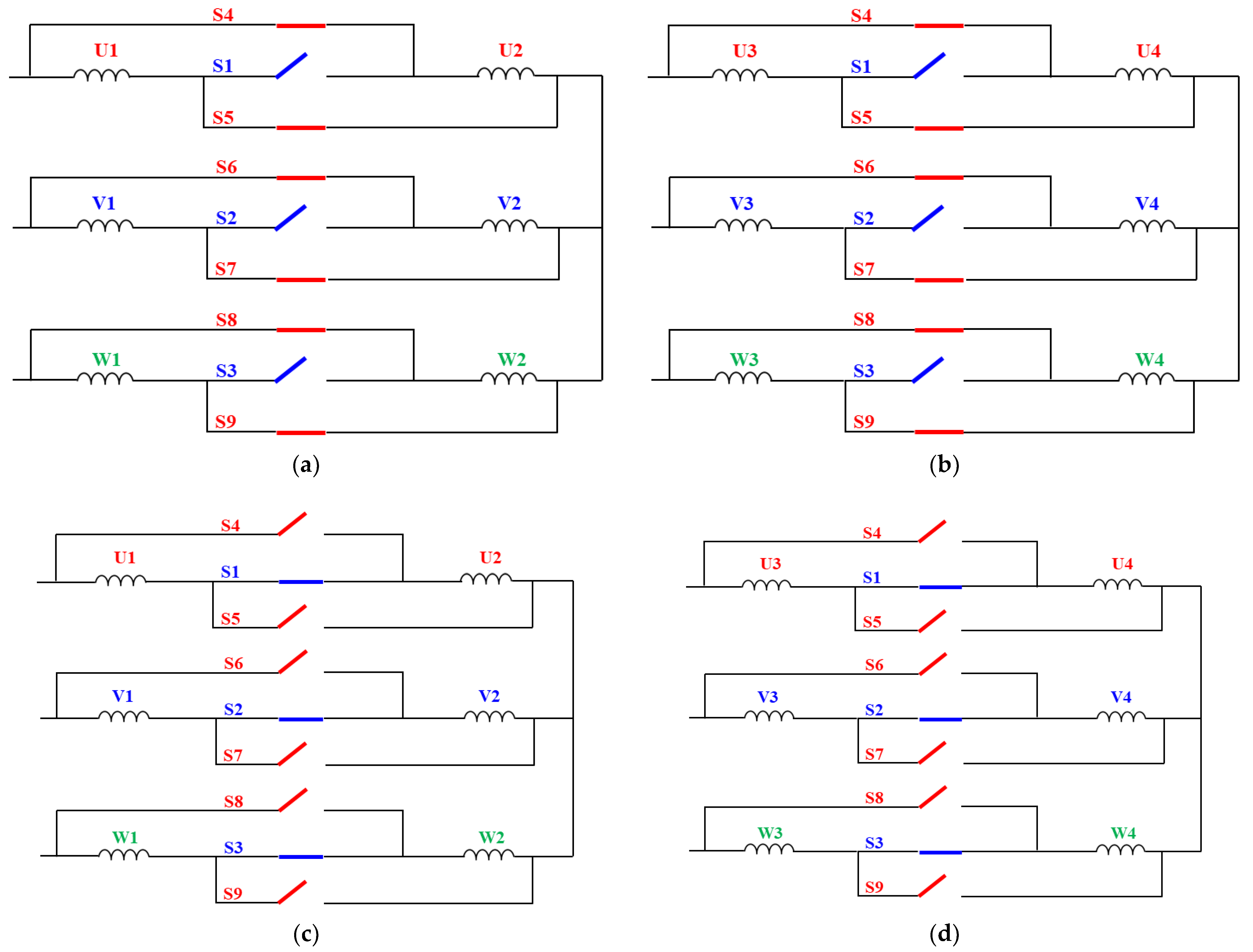
4.1. Topology
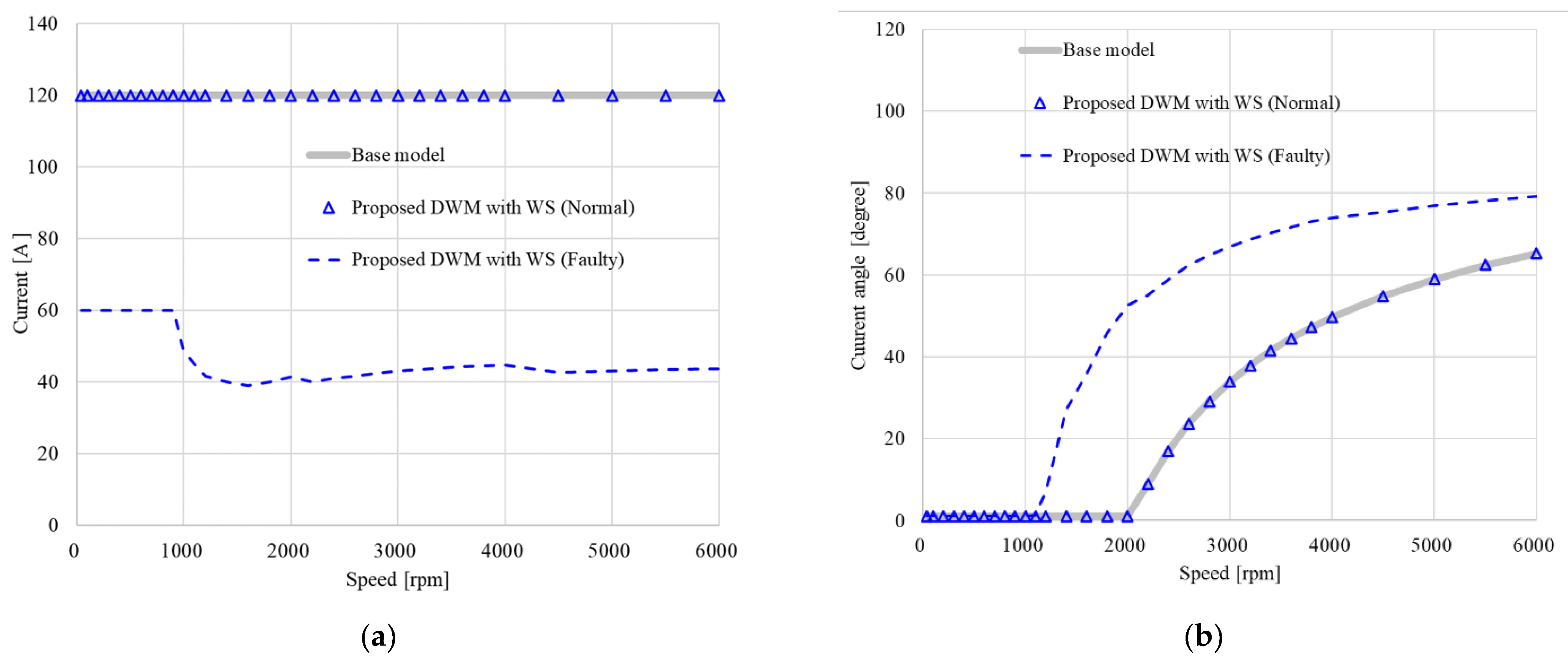
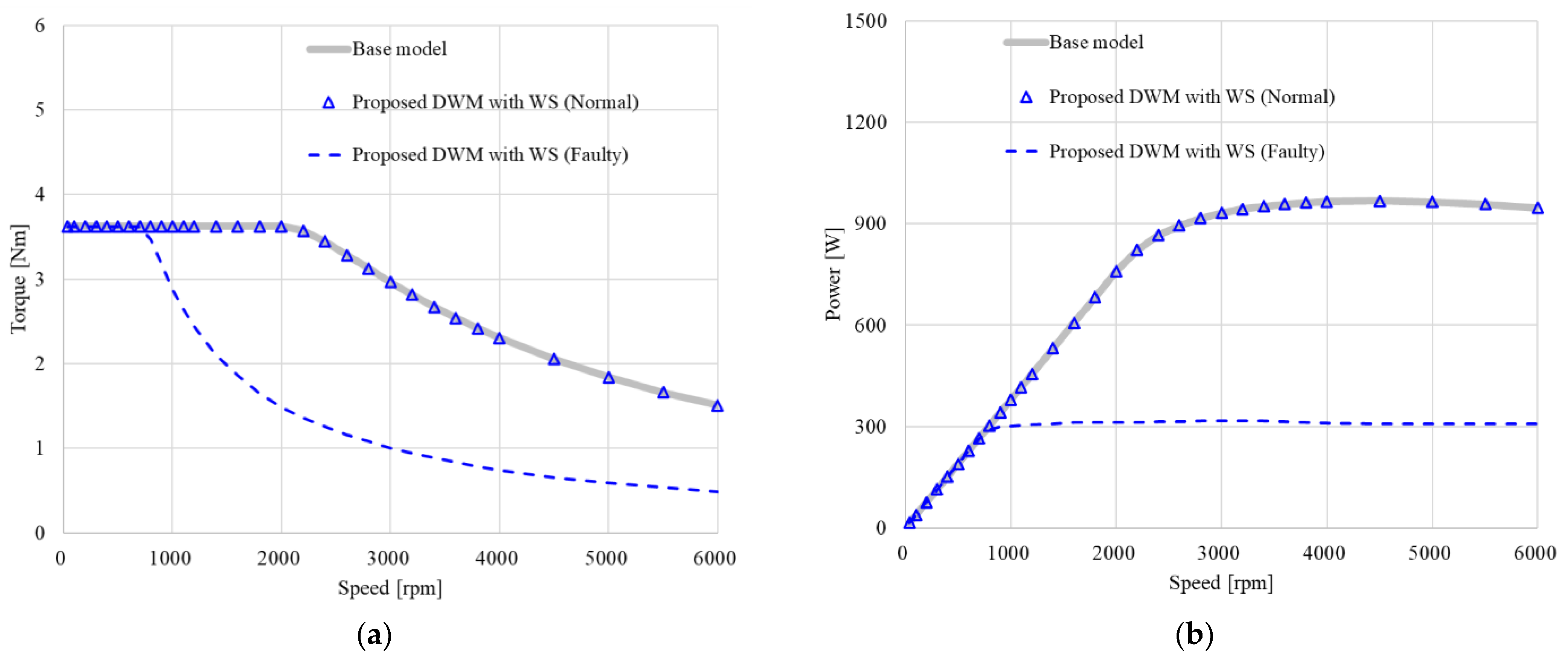
4.2. Performance Comparison
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhang, Y.; You, T.; Chen, J.; Du, C.; Ai, Z.; Qu, X. Safe and Energy-Saving Vehicle-Following Driving Decision-Making Framework of Autonomous Vehicles. IEEE Trans. Ind. Elec. 2022, 69, 13859–13871. [Google Scholar] [CrossRef]
- Karnouskos, S. Self-Driving Car Acceptance and the Role of Ethics. IEEE Trans. Eng. Manag. 2020, 67, 252–265. [Google Scholar] [CrossRef]
- Rasouli, A.; Tsotsos, J.K. Autonomous Vehicles That Interact with Pedestrians: A Survey of Theory and Practice. IEEE Trans. Intell. Transp. Syst. 2020, 21, 900–918. [Google Scholar] [CrossRef] [Green Version]
- Guo, J.; Kurup, U.; Shah, M. Is It Safe to Drive? An Overview of Factors, Metrics, and Datasets for Driveability Assessment in Autonomous Driving. IEEE Trans. Intell. Transp. Syst. 2020, 21, 3135–3151. [Google Scholar] [CrossRef]
- Chen, S.; Chen, Y.; Zhang, S.; Zheng, N. A Novel Integrated Simulation and Testing Platform for Self-Driving Cars with Hardware in the Loop. IEEE Trans. Intell. Veh. 2019, 4, 425–436. [Google Scholar] [CrossRef]
- Hussain, R.; Zeadally, S. Autonomous Cars: Research Results, Issues, and Future Challenges. IEEE Commun. Surv. Tutor. 2019, 21, 1275–1313. [Google Scholar] [CrossRef]
- Bianchi, N.; Pre, M.D.; Bolognani, S. Design of a Fault-Tolerant IPM Motor for Electric Power Steering. IEEE Trans. Veh. Technol. 2006, 55, 1102–1111. [Google Scholar] [CrossRef]
- Muduli, U.R.; Beig, A.R.; Jaafari, K.A.; Alsawalhi, J.Y.; Behera, R.K. Interrupt-Free Operation of Dual-Motor Four-Wheel Drive Electric Vehicle Under Inverter Failure. IEEE Trans. Transp. Electrif. 2021, 7, 329–338. [Google Scholar] [CrossRef]
- Grandesso, G.; Bravo-Palacios, G.; Wensing, P.M.; Fontana, M.; Del Prete, A. Exploring the Limits of a Redundant Actuation System through Co-Design. IEEE Access 2021, 9, 56802–56811. [Google Scholar] [CrossRef]
- Song, B.K.; Chin, J.W.; Kim, D.M.; Hwang, K.Y.; Lim, M.S. Temperature Estimation Using Lumped-Parameter Thermal Network With Piecewise Stator-Housing Modules for Fault-Tolerant Brake Systems in Highly Automated Driving Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 22, 5819–5832. [Google Scholar] [CrossRef]
- Jiang, X.; Huang, W.; Cao, R.; Hao, Z.; Jiang, W. Electric Drive System of Dual-Winding Fault-Tolerant Permanent-Magnet Motor for Aerospace Applications. IEEE Trans. Ind. Electron. 2015, 62, 7322–7330. [Google Scholar] [CrossRef]
- Noh, Y.; Kim, W.; Lee, J. The Optimal Current Ratio Control of Redundant Electric Drive Systems and Diagnostic Strategies for Disagreement. IEEE Access 2021, 9, 32115–32130. [Google Scholar] [CrossRef]
- Hwang, K.Y.; Kim, S.I.; Song, B.K. Single Winding Type Determination of Dual Winding Three-Phase Motor Considering Overheat Problem in Integrated Electric Braking System of Autonomous Vehicles. IEEE Trans. Transp. Electrif. 2023, 9, 656–666. [Google Scholar] [CrossRef]
- Sin, S.; Ali, R.; Muhammad, A.; Kwon, B.I. Operation Method of Non-Salient Permanent Magnet Synchronous Machine for Extended Speed Range. IEEE Access 2020, 8, 105922–105935. [Google Scholar] [CrossRef]
- Sin, S.; Ali, R.; Kwon, B.I. Improvement of the Constant-Power Speed Range of Surface-Permanent Magnet Machine Using Winding Switching. IEEE Access 2021, 9, 32298–32309. [Google Scholar] [CrossRef]
- Arsalan, A.; Noman, B.; Muhammad, A.; Kwon, B.I. Wide-speed range operation of pm vernier machines using wye and wye-delta winding configurations. IEEE Access 2020, 8, 194709–194718. [Google Scholar]
- Muhammad, A.; Asif, H.; Jawad, G.; Kwon, B.I. Brushless Operation of a Wound-Field Synchronous Machine Using a Novel Winding Scheme. IEEE Magn. 2019, 55, 8635517. [Google Scholar]
- Muhammad, A.; Asif, H.; Jawad, G.; Kwon, B.I. Wye-delta winding configuration for brushless operation of a wound field synchronous machine. Int. J. Appl. Electromagn. Mech. 2020, 64, 1165–1172. [Google Scholar]
- Ali, R.; Hwang, K.Y.; Lee, S.H.; Kwon, J.W.; Muhammad, A.; Kwon, B.I. Dual-Mode Brushless Wound Rotor Synchronous Machine for High Starting Torque. IEEE Access 2022, 10, 41657–41663. [Google Scholar]
- Lim, M.S.; Hong, J.P. Design of High Efficiency Wound Field Synchronous Machine with Winding Connection Change Method. IEEE Trans. Energy Convert. 2018, 33, 1978–1987. [Google Scholar] [CrossRef]
- Song, B.K.; Kim, D.K.; Kim, S.I.; Park, H.J.; Lee, G.H.; Lim, M.S. Comparative study on surface-mounted permanent magnet motors with segmented and connected core for brake system. IEEE Access 2020, 8, 167930–167938. [Google Scholar] [CrossRef]
- Lee, J.S.; Lee, H.; Nah, W. Minimizing the Number of X/Y Capacitors in an Autonomous Emergency Brake System Using the BPSO Algorithm. IEEE Trans. Power Electron. 2022, 37, 1630–1640. [Google Scholar] [CrossRef]
- Jo, T.H.; Joo, K.J.; Lee, J. Control Strategy of Dual-Winding Motor for Vehicle Electro-Hydraulic Braking Systems. Energies 2019, 13, 5090. [Google Scholar] [CrossRef]
- Hwang, K.Y.; Yun, K.Y. Fault-Tolerant Design Process of Spoke-Type IPM Motor Considering Irreversible Demagnetization of PM in Integrated Electric Brake System. IEEE Magn. 2022, 58, 8206809. [Google Scholar] [CrossRef]
- Hwang, K.Y.; Song, B.K.; Kwon, B.I. Asymmetric dual winding three-phase PMSM for fault tolerance of overheat in electric braking system of autonomous vehicle. IET Electr. Power Appl. 2019, 13, 1891–1898. [Google Scholar] [CrossRef]
- Hwang, K.Y.; Kwon, B.I. Design of Low-Cost BLAC Motors for Integrated Electric Brake Systems. IEEE Access 2019, 7, 184183–184193. [Google Scholar] [CrossRef]
- Hwang, K.Y.; Kwon, B.I. System-level optimal design process of inverter-fed blac motor used for 12-48 v integrated electric brake system. IET Electr. Power Appl. 2019, 13, 1891–1898. [Google Scholar] [CrossRef]
- Hendershot, J.R.; Miller, T.J.E. Design of Brushless Permanent Magnet Machines, 2nd ed.; Motor Design Books: Venice, FL, USA, 2010. [Google Scholar]
- Leonhard, W. Control of Electrical Drives, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 1996. [Google Scholar]
- Hwang, K.Y.; Yun, K.Y. Optimal Design of an Inverter-Fed PMSM for a Brake System Considering Variation in Motor Control Parameters and Input Voltage. Appl. Sci. 2022, 12, 1707. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Unit | Base Model |
|---|---|---|
| Number of slots/poles | - | 12/8 |
| Outer diameter of stator | mm | 72 |
| Stack length of stator | mm | 34 |
| Mechanical airgap | mm | 0.5 |
| Steel sheet of stator/rotor | - | 50PN470 |
| Line to line resistance | mΩ | 21.5 |
| Max. voltage | V | 12 |
| Max. current | A | 120 |
| Min. torque constant | Nm/A | 0.03 |
| Max. power | W | 900 |
| Items | Unit | Base Model | Conventional DWM | |
|---|---|---|---|---|
| Master Part | Slave Part | |||
| Max. peak voltage | V | 14 | ← | ← |
| Max. peak current | A | 120 | 120 (=60 + 60) | |
| Resistance L–L | mΩ | 21.5 | 43 | ← |
| Flux linkage | Wb | 0.0053 | ← | ← |
| D-axis inductance | μH | 35.3 | 70.5 | ← |
| Q-axis inductance | μH | 35.9 | 71.9 | ← |
| Items | Unit | Base Model | DWM with an Increased Stack Length | |
|---|---|---|---|---|
| Master Part | Slave Part | |||
| Max. peak voltage | V | 14 | ← | ← |
| Max. peak current | A | 120 | 120 (=60 + 60) | |
| Resistance L–L | mΩ | 21.5 | 73.9 | ← |
| Flux linkage | Wb | 0.0053 | ← | ← |
| D-axis inductance | μH | 35.3 | 141.0 | ← |
| Q-axis inductance | μH | 35.9 | 144.0 | ← |
| Mode | ON | OFF |
|---|---|---|
| Mode I (Normal mode) | S1, S2, S3 | S4, S5, S6, S7, S8, S9 |
| Mode II (Faulty mode) | S4, S5, S6, S7, S8, S9 | S1, S2, S3 |
| Items | Unit | Base Model | Proposed DWM with WS | |||
|---|---|---|---|---|---|---|
| @Normal | @Faulty | |||||
| Master Part | Slave Part | Master Part | Slave Part | |||
| Max. peak voltage | V | 14 | ← | ← | ← | ← |
| Max. peak current | A | 120 | 120 (=60 + 60) | 60 | ||
| Resistance L–L | mΩ | 21.5 | 43 | ← | 86 | ← |
| Flux linkage | Wb | 0.0053 | ← | ← | 0.0106 | ← |
| D-axis inductance | μH | 35.3 | 70.5 | ← | 282 | ← |
| Q-axis inductance | μH | 35.9 | 71.9 | ← | 287 | ← |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hwang, K.-Y.; Yoon, K.-Y. Improvement of Braking Response Performance of Fault-Tolerant Dual Winding Motor for Integrated Brake System Using Winding Switching. Appl. Sci. 2023, 13, 3442. https://doi.org/10.3390/app13063442
Hwang K-Y, Yoon K-Y. Improvement of Braking Response Performance of Fault-Tolerant Dual Winding Motor for Integrated Brake System Using Winding Switching. Applied Sciences. 2023; 13(6):3442. https://doi.org/10.3390/app13063442
Chicago/Turabian StyleHwang, Kyu-Yun, and Keun-Young Yoon. 2023. "Improvement of Braking Response Performance of Fault-Tolerant Dual Winding Motor for Integrated Brake System Using Winding Switching" Applied Sciences 13, no. 6: 3442. https://doi.org/10.3390/app13063442