
Straightness Perception Mechanism of Scraper Conveyor Based on the Three-Dimensional Curvature Sensing of FBG

Abstract
:1. Introduction
2. Design and Development of 3D Curvature Sensor of FBG
2.1. Curvature Sensing Principle of FBG
2.2. Feasibility Analysis of Space Curvature Measurement
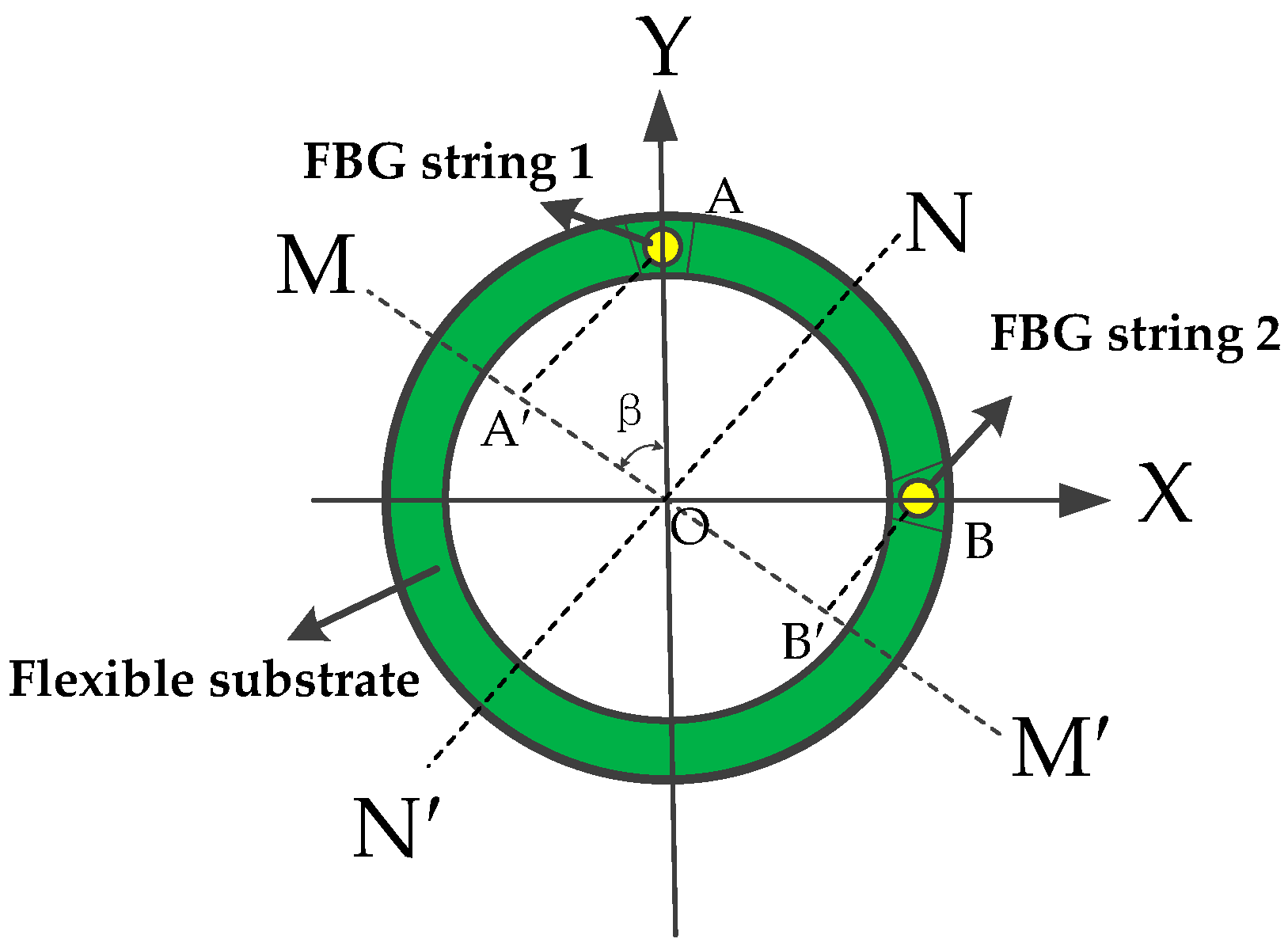
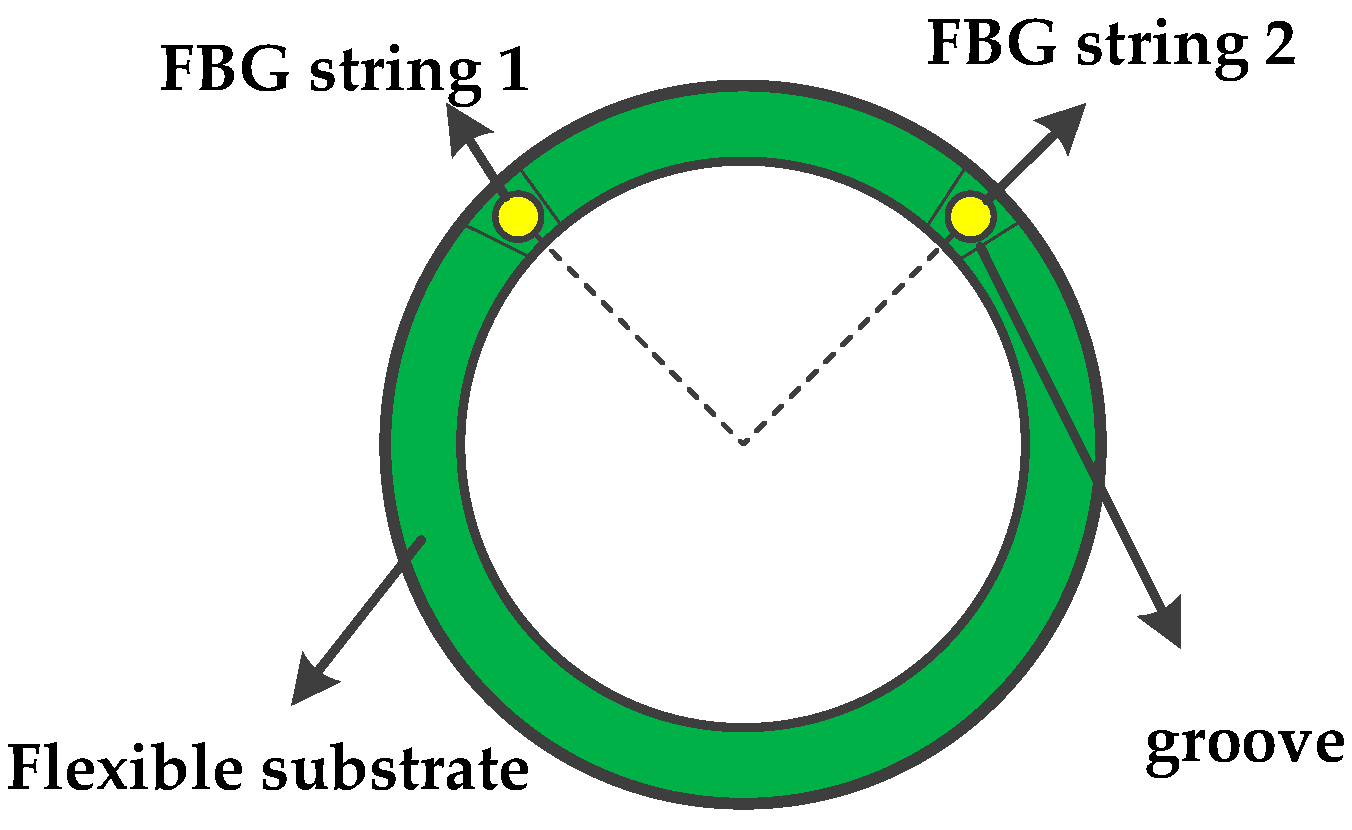
2.3. Development of 3D Curvature Sensor of FBG
2.4. Sensor Numerical Simulation Study
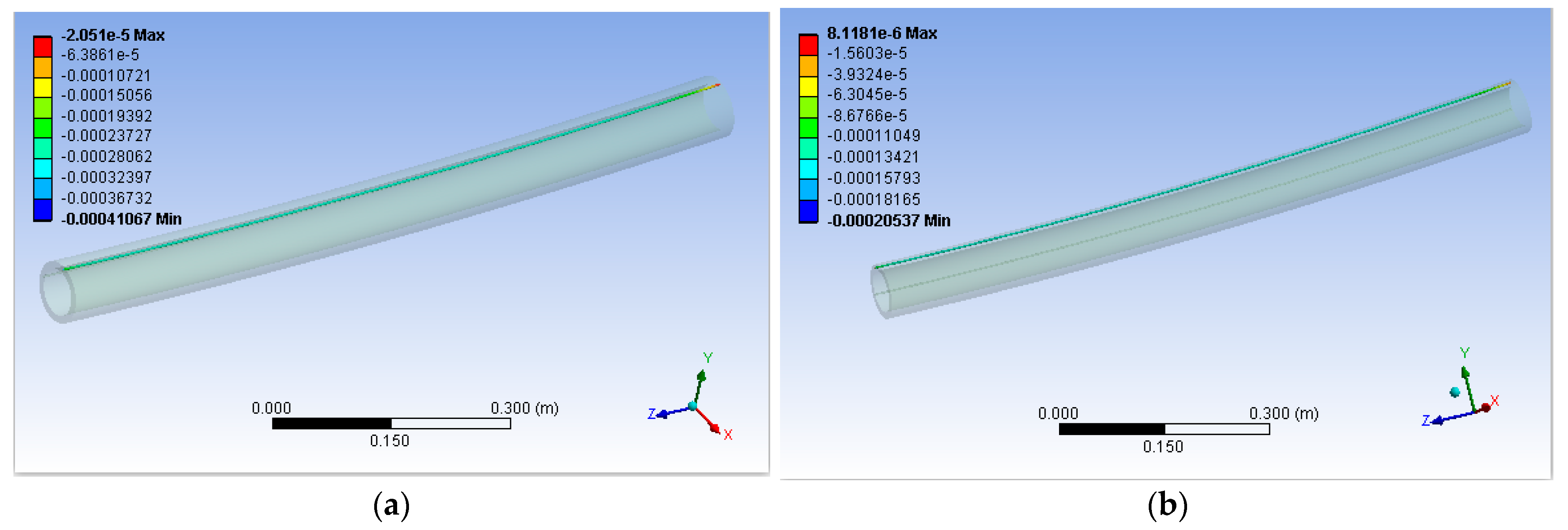
- Since the simulation study in this paper is the strain characteristics of the FBG string built in the sensor under the condition of small curvature, the string mode of FBG is studied, respectively, on the theory of neutral axis and axis-bearing, and the strain characteristics of FBG string under different curvature modes are simulated. The results show that the strain of the FBG string on the axis-bearing string should be one order of magnitude larger than that of the FBG disguised as a relative neutral axis, which fully indicates that the sensor beam designed with a circular section satisfies the neutral axis theory.
- It can be seen from the figure that the bending direction of the FBG string is consistent with the bending direction of the flexible substrate of the sensor, which fully indicates that the FBG string inside the sensor can maintain the same deformation as the sensor substrate, and proves the rationality of the selection of the sensor substrate and filling material.
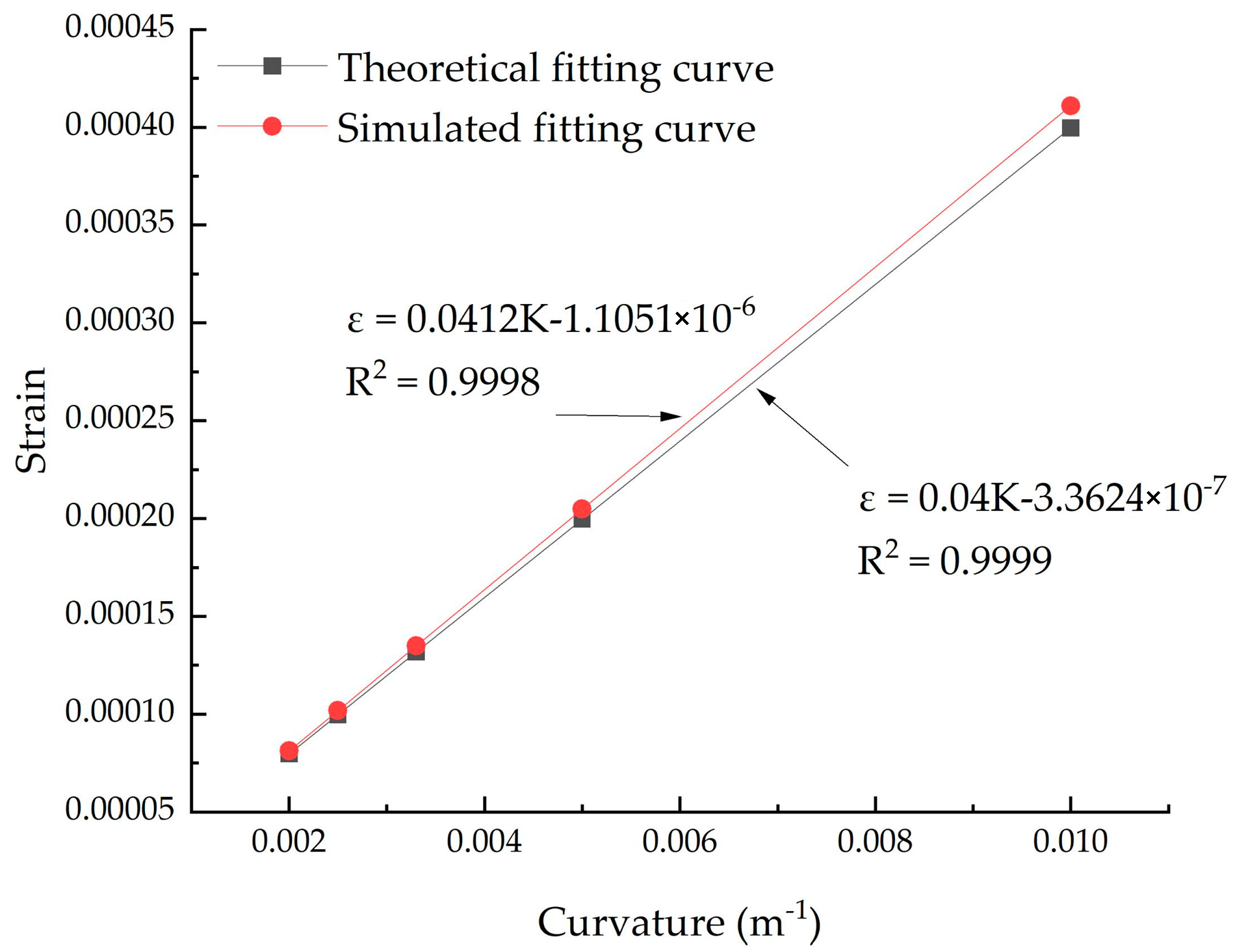
- The maximum compressive strain of the last beam of FBG under different curvature modes is 0.00041, 0.000205, 0.000137, 0.0001 and 0.0000807, almost consistent with the theoretical calculation results, which proves the correctness of the sensor theory of the developed fiber Bragg grating curvature sensor. Table 1 below shows the theoretical and simulation results of the relationship between curvature and strain. The variation curve of FBG strain with curvature is shown in Figure 6.
3. Test and Result Analysis of Three-Dimensional Bending Test
3.1. Study on Three-Dimensional Curved Shape Fitting Method of Scraper Conveyor Based on Curvature Information
3.1.1. Curvature Continuity Algorithm
- Linear interpolation method
- Cubic spline interpolation method
- In each segment of the division, we must ensure that ;
- To meet ;
- Spline function of the first derivative and second derivative exist, and continuity ensures that the spline function itself is continuous and smooth.
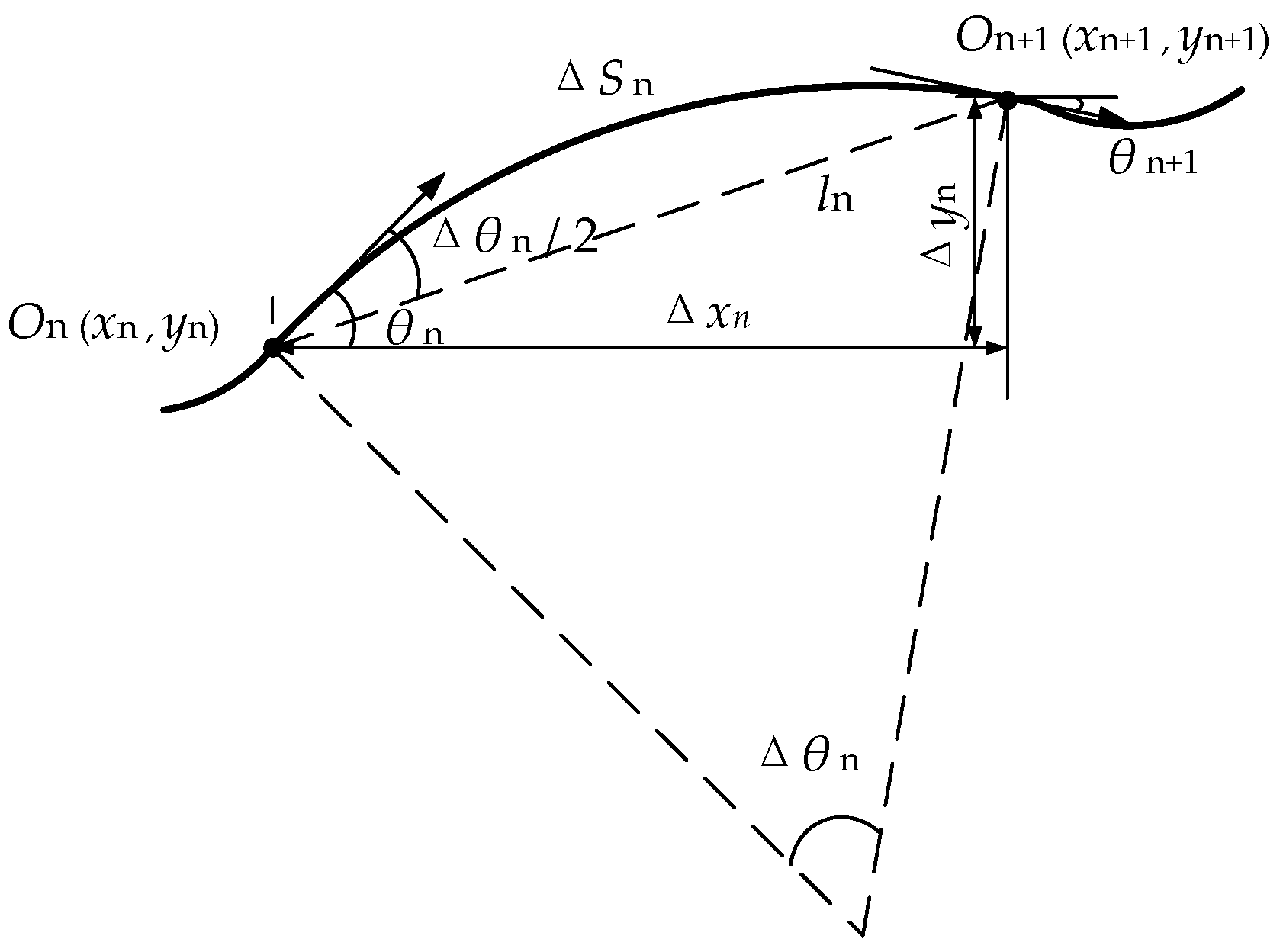
3.1.2. Curve Reconstruction Algorithm Based on Curvature
3.2. Three-Dimensional Bending Shape Determination
3.3. Perception and Collection of Data
3.4. Data Processing Analysis
4. Conclusions
- The numerical simulation results show a high linear correlation between the strain of the built-in FBG string and the curvature at the bend. The linearity is up to 0.9998, which is consistent with the theoretical results and verifies the theoretical rationality of the sensor design.
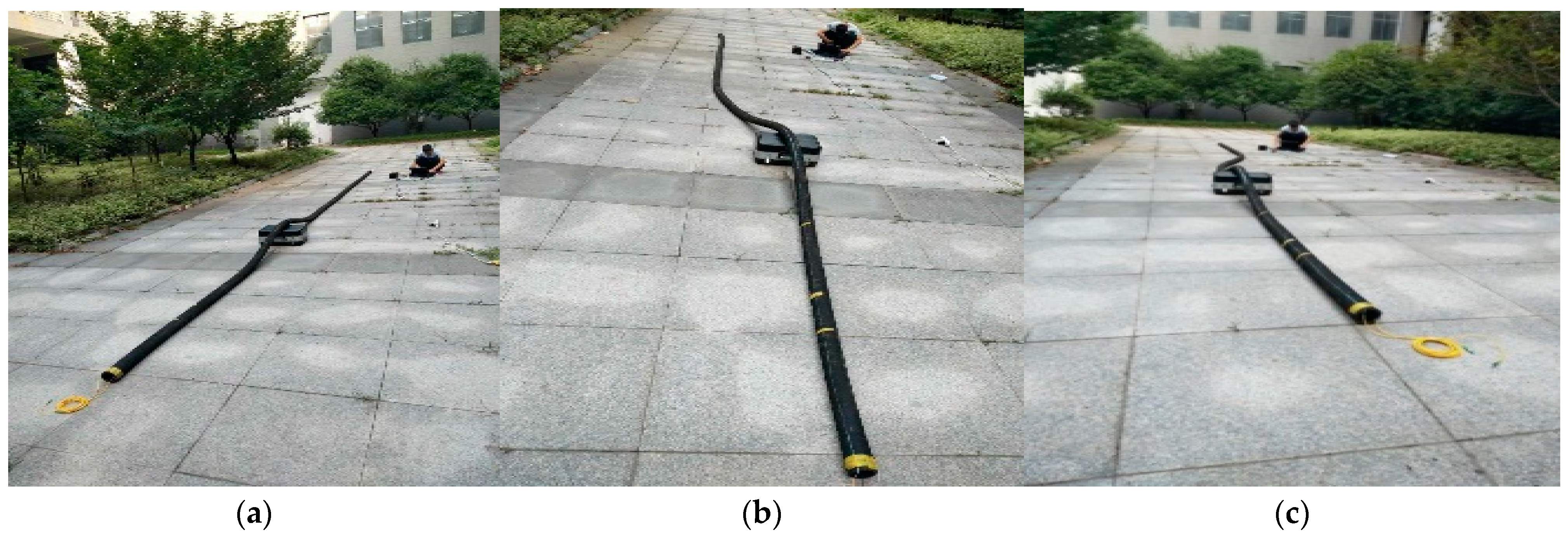
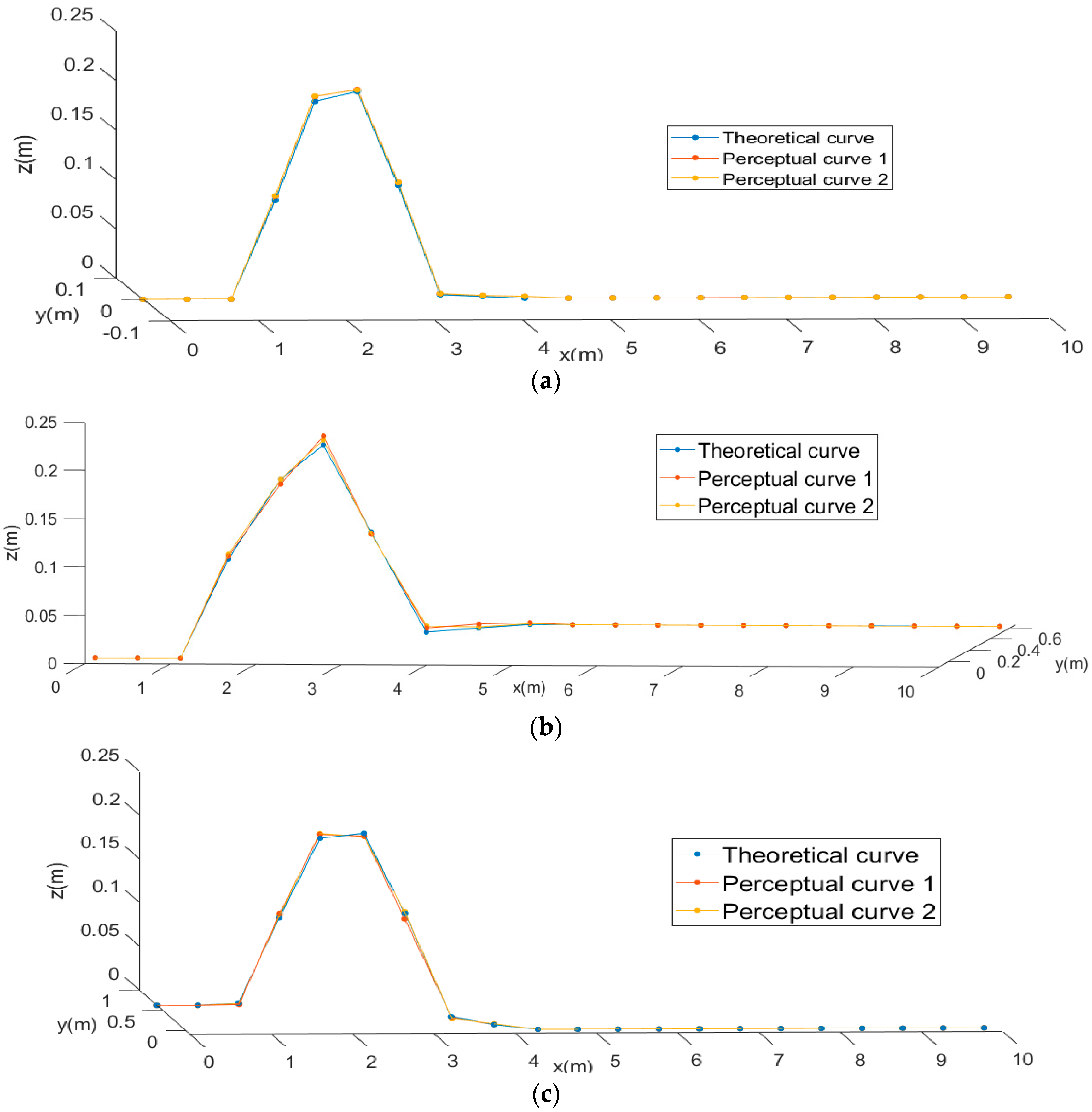
- Based on the curvature sensing principle of FBG, the 3D curvature sensor of FBG was designed and developed, the 3D spatial curve reconstruction algorithm based on the curvature information in the orthogonal direction was derived, and the 3D bending test platform was built for verification according to the actual bending morphological characteristics of the scraper conveyor on the working face. The test results show that, in the case of the three-dimensional curved shape layout of the scraper conveyor, the measured curve is basically consistent with the perceived curve, and the error of each coordinate axis is generally no more than 15 mm, which can meet the detection accuracy requirements of the straightness of the intelligent working face.
- The three-dimensional curvature sensor of FBG can adapt to the three-dimensional bending shape of different scraper conveyors and shows good stability of repeated tests.
- Three-dimensional curvature sensor of FBG can be used for the real-time perception of the three-dimensional bending shape of the scraper conveyor.
- The research results can greatly promote the intelligent process of a coal mine and provide a new idea for realizing the perception and control of the straightness of the scraper conveyor of an intelligent working face.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, G.; Xu, Y.; Ren, H. Intelligent and ecological coal mining as well as clean utilization technology in China: Review and prospects. Int. J. Min. Sci. Technol. 2019, 29, 161–169. [Google Scholar] [CrossRef]
- Li, S.; Xie, J.; Wang, X.; Ren, F.; Zhang, X.; Bao, Q. Path planning of hydraulic support pushing mechanism based on extreme learning machine and descartes path planning. Symmetry 2021, 13, 97. [Google Scholar] [CrossRef]
- Kelly, M.; Hainsworth, D.; Reid, D.; Caris, C.; Gurgenci, H. Progress towards longwall automation. In Proceedings of the 5th International Symposium on Mining Science and Technology, Xuzhou, China, 20–22 October 2004. [Google Scholar]
- Hatherly, P. Overview on the application of geophysics in coal mining. Int. J. Coal. Geol. 2013, 114, 74–84. [Google Scholar] [CrossRef]
- Fan, Q.; Li, W.; Hui, J.; Wu, L.; Yu, Z.; Yan, W.; Zhou, L. Integrated positioning for coal mining machinery in enclosed underground mine based on SINS/WSN. Sci. World J. 2014, 2014, 460415. [Google Scholar] [CrossRef] [Green Version]
- Reid, D.C.; Hainsworth, D.W.; Ralston, J.C.; McPhee, R.J. Shearer guidance: A major advance in longwall mining. In Proceedings of the 4th International Conference on Field and Service Robotics, Mt Fuji, Japan, 14–16 July 2006. [Google Scholar]
- Yang, H.; Li, W.; Zhang, J.; Si, Z. Research on error compensation property of strapdown inertial navigation system using dynamic model of shearer. IEEE Access 2016, 4, 2045–2055. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, B.; Wang, S.; Ge, S. Dynamic precise positioning method of shearer based on closing path optimal estimation model. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1468–1475. [Google Scholar]
- Hao, S.; Wang, S.; Malekian, R.; Zhang, B.; Liu, W.; Li, Z. A geometry surveying model and instrument of a scraper conveyor in unmanned longwall mining faces. IEEE Access 2017, 5, 4095–4103. [Google Scholar] [CrossRef]
- Xing, Z.; Zhao, S.; Guo, W.; Guo, X.; Wang, Y. Processing laser point cloud in fully mechanized mining face based on DGCNN. ISPRS Int. J. Geo-Inf. 2021, 10, 482. [Google Scholar] [CrossRef]
- Li, S.; Xie, J.; Ren, F.; Zhang, X.; Wang, X.; Wang, B. Virtual straightening of scraper conveyor based on the position and attitude solution of industrial robot model. Int. J. Coal Sci. Technol. 2021, 8, 1149–1170. [Google Scholar] [CrossRef]
- Mendez, A.; Morse, T.F.; Mendez, F. Applications of embedded optical fiber sensors in reinforced concrete buildings and structures. In Proceedings of the Fiber Optic Smart Structures and Skins II, Boston, MA, USA, 5 September 1989. [Google Scholar]
- Zhao, Y.; Ansari, F. Embedded fiber optic sensor for characterization of interface strains in FRP composite. Sens. Actuators A Phys. 2002, 200, 247–251. [Google Scholar] [CrossRef]
- Ou, J.; Zhou, Z.; Wu, Z.; Tian, S.; Zhao, X. Optical FBGs’ sensing properties and practical application in civil infrastructures. In Proceedings of the 2nd Asia/Pacific Conference on Fundamental Problems of Optoelectronics and Microelectronics, Vladivostok, Russia, 30 September–4 October 2002. [Google Scholar]
- Du, J.; He, Z. Sensitivity enhanced strain and temperature measurements based on FBG and frequency chirp magnification. Opt. Express 2013, 21, 27111–27118. [Google Scholar] [CrossRef] [PubMed]
- Ren, L.; Jia, Z.; Li, H.; Song, G. Design and experimental study on FBG hoop-strain sensor in pipeline monitoring. Opt. Fiber Technol. 2014, 20, 15–23. [Google Scholar] [CrossRef]
- Chen, H. Fiber optic pressure sensor based on a single-mode fiber F–P cavity. Measurement 2010, 43, 370–374. [Google Scholar] [CrossRef]
- Liang, M.; Fang, X.; Wu, G.; Xue, G.; Li, H. A FBG pressure sensor with temperature compensation based on diaphragm-cantilever structure. Optik 2017, 145, 503–512. [Google Scholar] [CrossRef]
- Au, H.Y.; Khijwania, S.K.; Fu, H.; Chung, W.H.; Tam, H.Y. Temperature-insensitive FBG based tilt sensor with large dynamic range. J. Lightwave Technol. 2011, 29, 1714–1720. [Google Scholar] [CrossRef]
- Liu, T.; Sun, W.; Kou, H.; Yang, Z.; Meng, Q.; Zheng, Y.; Wang, H.; Yang, X. Experimental study of leakage monitoring of diaphragm walls based on distributed optical fiber temperature measurement technology. Sensor 2019, 19, 2269. [Google Scholar] [CrossRef] [Green Version]
- Liang, M.; Fang, X.; Li, S.; Wu, G.; Ma, M.; Zhang, Y. A fiber bragg grating tilt sensor for posture monitoring of hydraulic supports in coal mine working face. Measurement 2019, 138, 305–313. [Google Scholar] [CrossRef]
- Zhao, Z.; Zhang, Y.; Li, C.; Wan, Z.; Li, Y.; Wang, K.; Xu, J. Monitoring of coal mine roadway roof separation based on fiber Bragg grating displacement sensors. Int. J. Rock Mech. Min. 2015, 74, 128–132. [Google Scholar] [CrossRef]
- Wang, P.; Zhang, N.; Kan, J.; Xie, Z.; Wei, Q.; Yao, W. Fiber bragg grating monitoring of full-bolt axial force of the bolt in the deep strong mining roadway. Sensor 2020, 20, 4242. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Zhang, N.; Si, G. A fiber bragg grating-based monitoring system for roof safety control in underground coal mining. Sensor 2016, 16, 1759. [Google Scholar] [CrossRef] [Green Version]
- Gander, M.J.; MacPherson, W.N.; McBride, R.J.; Jones, D.C.; Zhang, L.; Bennion, I.; Blanchard, P.M.; Burnett, J.G.; Greenaway, A.H. Bend mesurement using bragg gratings in multicore fibre. Electron. Lett. 2000, 36, 2–3. [Google Scholar] [CrossRef]
- Floris, I.; Adam, J.M.; Calderón, P.A.; Sales, S. Fiber optic shape sensors: A comprehensive review. Opt. Laser Eng. 2021, 139, 106508. [Google Scholar] [CrossRef]
- Song, Y.; Fang, X.; Wu, G.; Chen, N.; Liang, M.; Xu, Z.; Zhang, F. Research on straightness perception compensation model of FBG scraper conveyor based on rotation error angle. Sensor 2022, 22, 6399. [Google Scholar] [CrossRef] [PubMed]
- Chen, N.; Fang, X.; Liang, M.; Xue, X.; Zhang, F.; Wu, G.; Qiao, F. Research on hydraulic support attitude monitoring method merging FBG sensing technology and adaboost algorithm. Sustainability 2023, 15, 2239. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Concrete Parameters | Numerical Value | ||||
|---|---|---|---|---|---|
| Radius of Curvature | 100 m | 200 m | 300 m | 400 m | 500 m |
| Curvature | 0.01 m−1 | 0.005 m−1 | 0.00333 m−1 | 0.0025 m−1 | 0.002 m−1 |
| Theoretical strain | 0.0004 | 0.0002 | 0.000133 | 0.0001 | 0.00008 |
| Simulated strain | 0.00041 | 0.000205 | 0.000137 | 0.0001 | 0.0000807 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, G.; Qiao, F.; Fang, X.; Liang, M.; Song, Y. Straightness Perception Mechanism of Scraper Conveyor Based on the Three-Dimensional Curvature Sensing of FBG. Appl. Sci. 2023, 13, 3619. https://doi.org/10.3390/app13063619
Wu G, Qiao F, Fang X, Liang M, Song Y. Straightness Perception Mechanism of Scraper Conveyor Based on the Three-Dimensional Curvature Sensing of FBG. Applied Sciences. 2023; 13(6):3619. https://doi.org/10.3390/app13063619
Chicago/Turabian StyleWu, Gang, Fukang Qiao, Xinqiu Fang, Minfu Liang, and Yang Song. 2023. "Straightness Perception Mechanism of Scraper Conveyor Based on the Three-Dimensional Curvature Sensing of FBG" Applied Sciences 13, no. 6: 3619. https://doi.org/10.3390/app13063619