
Multi-Objective Optimization of LCC-S-Compensated IPT System for Improving Misalignment Tolerance


Abstract
:1. Introduction
2. Design and Analysis of LCC-S Compensation Topologies
3. Multi-Objective Optimization of Compensation Parameters
3.1. Overview of MOPSO Algorithm
3.2. Optimization Objectives
- (1)
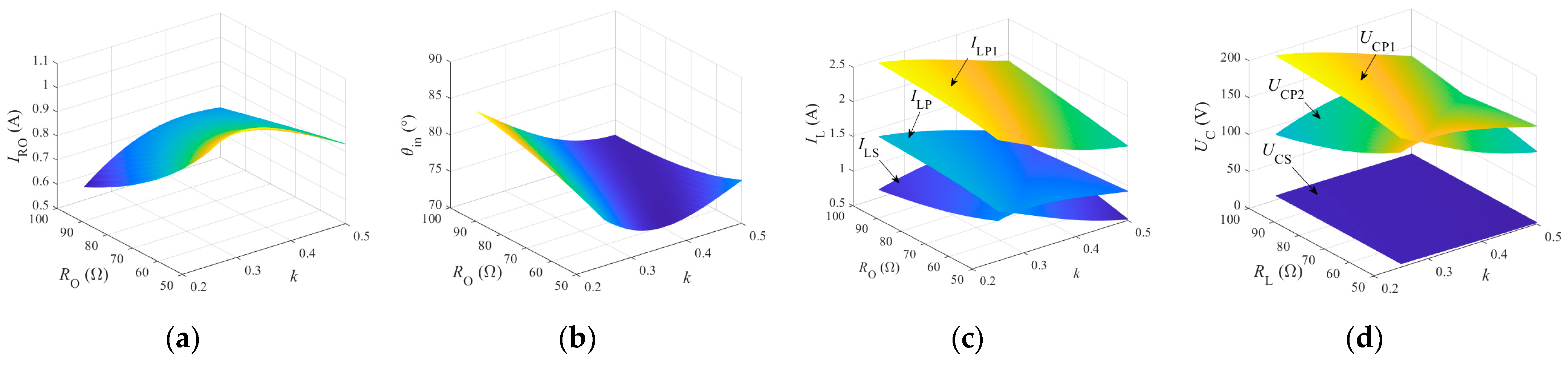
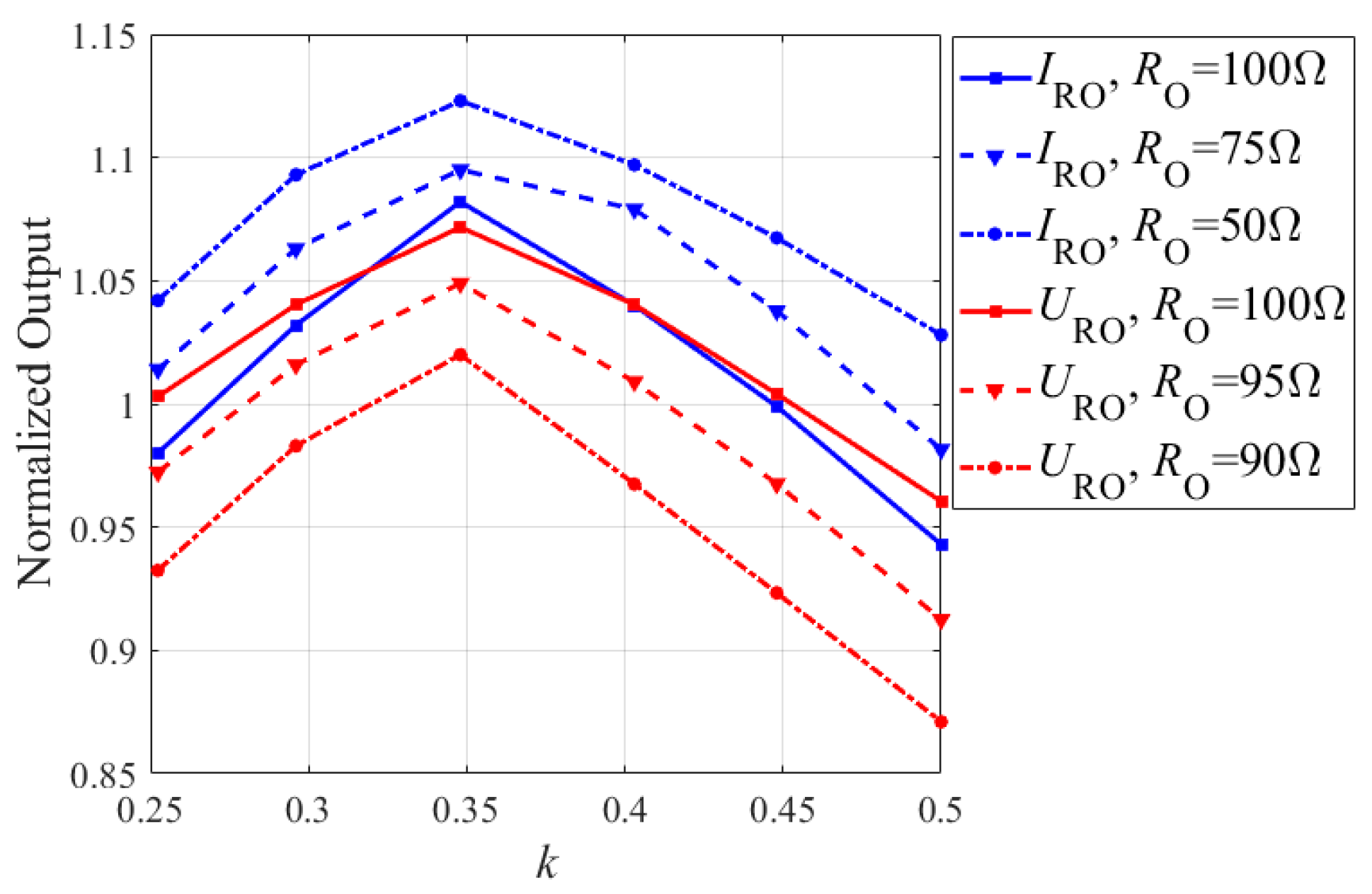
- Minimize output fluctuations: In any state where k ϵ (kmin, kmax) and RO ϵ (ROmin, ROmax), the current IRO [k(i), RO(j)] across the load is most approximate to the design value IRO_D for the CC mode, and the voltage URO [k(i), RO(j)] over the load should be close to the design value URO_D for the CV mode. k(i) and RO(j) represent the ith k and jth RO, respectively. Here, the square of the current difference is used to represent output fluctuations, and its mathematical description is defined as
- (2)
- Reduce current stresses across inductor and coils: The voltage stresses over capacitors and current stresses through inductors result in high power loss due to ESRs in the passive compensation components. In particular, the larger ESRs in the inductor and coils have a great impact on system efficiency. Therefore, the secondary objective is to minimize the current stress across the inductor and coils. The sum of current stresses through the inductor and coils are involved in the optimization function as follows:
- (3)
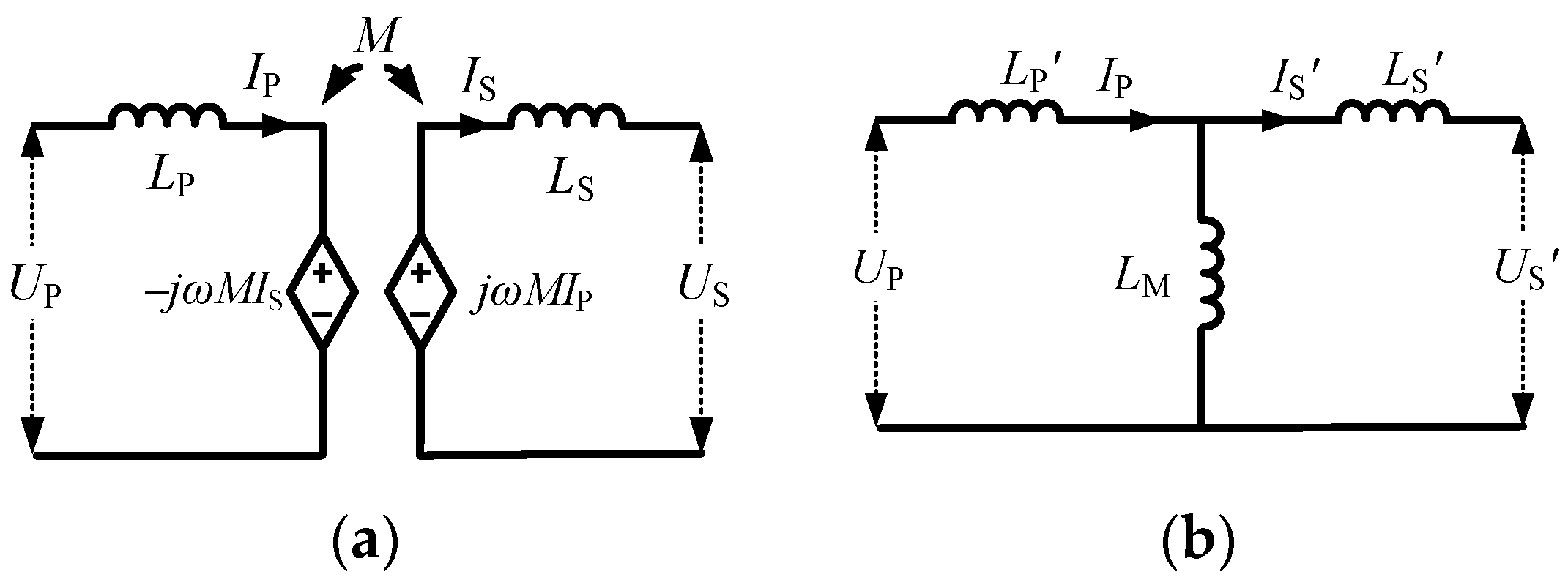
- Lessen magnetizing power in LCT: For the loosely coupled coils, neglecting the magnetic losses and coil resistance, the active power transfer from the transmitter to the receiver can be given aswhere ILP and ILS are the RMS value of the primary and secondary coil currents, respectively, and θPS is the phase difference of the fundamental current phasors between the transmitting and receiving winding. The reactive power flowing between couple coils can be given asFor a traditional compensated LCT, when the induced current IS lags IP by a quarter cycle, the maximum power can be transferred from LP to LS. However, after anti-misalignment optimization, the detuned compensation parameters make θPS no longer equal to π/2. The reactive power causes coil magnetization, bringing more copper and core losses. In order to improve the efficiency of LCT, the ratio between the reactive power and active power should be kept to a minimum. The ratio, taken as the third objective function, is given asThe targets of the optimization consist of three parts. The most important part is to minimize the output current and voltage fluctuation for different coupling coefficients and loads. The other two parts are designed to improve transmission efficiency. Taken together, the objective function iswhere Nk and NRO are set as the sampling number of coupling coefficients and loads.
3.3. Setting Constraints
3.4. Implementation of MOPSO
4. Experimental Verification
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Nithiyanandam, V.; Sampath, V. Approach-Based Analysis on Wireless Power Transmission for Bio-Implantable Devices. Appl. Sci. 2023, 13, 415. [Google Scholar] [CrossRef]
- Nutwong, S.; Sangswang, A.; Naetiladdanon, S. An Inverter Topology for Wireless Power Transfer System with Multiple Transmitter Coils. Appl. Sci. 2019, 9, 1551. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.; Yang, J.; Fan, J.; Wang, B.; Li, D. A Magnetic Field Containment Method for an IPT System with Multiple Transmitting Coils Based on Reflective Properties. Electronics 2023, 12, 653. [Google Scholar] [CrossRef]
- Mai, R.; Chen, Y.; Zhang, Y.; Yang, N.; Cao, G.; He, Z. Optimization of the passive components for an S-LCC topology-based WPT system for charging massive electric bicycles. IEEE Trans. Ind. Electron. 2018, 65, 7. [Google Scholar] [CrossRef]
- Feng, H.; Tavakoli, R.; Onar, O.C.; Pantic, Z. Advances in High-Power Wireless Charging Systems: Overview and Design Considerations. IEEE Trans. Transp. Electrif. 2020, 6, 886–919. [Google Scholar] [CrossRef]
- Jo, S.; Shin, C.-S.; Kim, D.-H. Novel Design Method in Wireless Charger for SS Topology with Current/Voltage Self-Limitation Function. Appl. Sci. 2023, 13, 1488. [Google Scholar] [CrossRef]
- Li, J.; Zhang, X.; Tong, X. Research and Design of Misalignment-Tolerant LCC–LCC Compensated IPT System with Constant-Current and Constant-Voltage Output. IEEE Trans. Power Electron. 2023, 38, 1301–1313. [Google Scholar] [CrossRef]
- Li, G.; Jo, C.-H.; Shin, C.-S.; Jo, S.; Kim, D.-H. A Load-Independent Current/Voltage IPT Charger with Secondary Side-Controlled Hybrid-Compensated Topology for Electric Vehicles. Appl. Sci. 2022, 12, 10899. [Google Scholar] [CrossRef]
- Campi, T.; Cruciani, S.; Maradei, F.; Feliziani, M. Efficient Wireless Drone Charging Pad for Any Landing Position and Orientation. Energies 2021, 14, 8188. [Google Scholar] [CrossRef]
- ElGhanam, E.; Hassan, M.; Osman, A.; Kabalan, H. Design and Performance Analysis of Misalignment Tolerant Charging Coils for Wireless Electric Vehicle Charging Systems. World Electr. Veh. J. 2021, 12, 89. [Google Scholar] [CrossRef]
- Varikkottil, S.; Febin Daya, J.L. Estimation of Optimal Operating Frequency for Wireless EV Charging System under Misalignment. Electronics 2019, 8, 342. [Google Scholar] [CrossRef] [Green Version]
- Ghazizadeh, S.; Ahmed, K.; Seyedmahmoudian, M.; Mekhilef, S.; Chandran, J.; Stojcevski, A. Critical Analysis of Simulation of Misalignment in Wireless Charging of Electric Vehicles Batteries. Batteries 2023, 9, 106. [Google Scholar] [CrossRef]
- Niu, S.; Zhao, Q.; Chen, H.; Yu, H.; Niu, S.; Jian, L. Underwater Wireless Charging System of Unmanned Surface Vehicles with High Power, Large Misalignment Tolerance and Light Weight: Analysis, Design and Optimization. Energies 2022, 15, 9529. [Google Scholar] [CrossRef]
- Vu, V.B.; Ramezani, A.; Triviño, A.; González-González, J.M.; Kadandani, N.B.; Dahidah, M.; Pickert, V.; Narimani, M.; Aguado, J. Operation of Inductive Charging Systems Under Misalignment Conditions: A Review for Electric Vehicles. IEEE Trans. Transp. Electrif. 2023, 9, 1857–1887. [Google Scholar] [CrossRef]
- Qu, X.; Chu, H.; Huang, Z.; Wong, S.C.; Chi, K.T.; Mi, C.C.; Chen, X. Wide Design Range of Constant Output Current Using Double-Sided LC Compensation Circuits for Inductive-Power-Transfer Applications. IEEE Trans. Power Electron. 2019, 34, 2364–2374. [Google Scholar] [CrossRef]
- Qu, X.; Jing, Y.; Han, H.; Wong, S.-C.; Tse, C.K. Higher Order Compensation for Inductive-Power-Transfer Converters with Constant-Voltage or Constant-Current Output Combating Transformer Parameter Constraints. IEEE Trans. Power Electron. 2017, 32, 394–405. [Google Scholar] [CrossRef]
- Pearce, M.G.S.; Covic, G.A.; Boys, J.T. Robust ferrite-less double d topology for roadway IPT applications. IEEE Trans. Power Electron. 2019, 34, 6062–6075. [Google Scholar] [CrossRef]
- Feng, H.; Cai, T.; Duan, S.; Zhang, X.; Hu, H.; Niu, J. A Dual-Side-Detuned Series–Series Compensated Resonant Converter for Wide Charging Region in a Wireless Power Transfer System. IEEE Trans. Ind. Electron. 2017, 65, 2177–2188. [Google Scholar] [CrossRef]
- Patil, D.; McDonough, M.K.; Miller, J.M.; Fahimi, B.; Balsara, P.T. Wireless Power Transfer for Vehicular Applications: Overview and Challenges. IEEE Trans. Transp. Electrif. 2018, 4, 3–37. [Google Scholar] [CrossRef]
- Gong, Z.-W.; Li, J.-G.; Tong, X.-Q. Misalignment-Tolerant Series Hybrid with Active Adjustable Constant Current and Constant Voltage Output Wireless Charging System. Energies. 2021, 14, 7594. [Google Scholar] [CrossRef]
- Zhao, J.; Cai, T.; Duan, S.; Feng, H.; Chen, C.; Zhang, X. A General Design Method of Primary Compensation Network for Dynamic WPT System Maintaining Stable Transmission Power. IEEE Trans. Power Electron. 2017, 31, 8343–8358. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, X.; Zhang, K.; Cui, X.; Jiao, C.; Yang, X. Design of LCC-S Compensation Topology and Optimization of Misalignment Tolerance for Inductive Power Transfer. IEEE Access 2020, 8, 191309–191318. [Google Scholar] [CrossRef]
- Zhao, S.; Blaabjerg, F.; Wang, H. An Overview of Artificial Intelligence Applications for Power Electronics. IEEE Trans. Power Electron. 2021, 36, 4633–4658. [Google Scholar] [CrossRef]
- De Leon-Aldaco, S.E.; Calleja, H.; Alquicira, J.A. Metaheuristic optimization methods applied to power converters: A review. IEEE Trans. Power Electron. 2015, 30, 6791–6803. [Google Scholar] [CrossRef]
- Rong, C.; He, X.; Wu, Y.; Qi, Y.; Wang, R.; Sun, Y.; Liu, M. Optimization design of resonance coils with high misalignment tolerance for drone wireless charging based on genetic algorithm. IEEE Trans. Ind. Appl. 2022, 58, 1242–1253. [Google Scholar] [CrossRef]
- Luo, Z.; Wei, X.; Pearce, M.G.S.; Covic, G.A. Multiobjective optimization of inductive power transfer double-D pads for electric vehicles. IEEE Trans. Power Electron. 2021, 36, 5135–5146. [Google Scholar] [CrossRef]
- Wang, D.; Fu, C.; Zhao, Q.; Hu, T. A PSO-Based Optimization Design of W-Type Noncontact Transformer for Stable Power Transfer in DWPT System. IEEE Trans. Ind. Appl. 2022, 58, 1211–1221. [Google Scholar] [CrossRef]
- Fan, W.; Hu, Z.; Veerasamy, V. PSO-Based Model Predictive Control for Load Frequency Regulation with Wind Turbines. Energies 2022, 15, 8219. [Google Scholar] [CrossRef]
- Yang, Y.; Tan, S.; Hui, S.Y.R. Front-end parameter monitoring method based on two-layer adaptive differential evolution for SS-compensated wireless power transfer systems. IEEE Trans. Ind. Inform. 2019, 15, 6101–6113. [Google Scholar] [CrossRef]
- Zhao, B.; Zhang, X.; Huang, J. AI algorithm-based two-stage optimal design methodology of high-efficiency CLLC resonant converters for the hybrid AC–DC microgrid applications. IEEE Trans. Ind. Electron. 2019, 66, 9756–9767. [Google Scholar] [CrossRef]
- Yuan, J.; Chen, B.; Rao, B.; Tian, C.; Wang, W.; Xu, X. Possible analogy between the optimal digital pulse width modulation technology and the equivalent optimisation problem. IET Power Electron. 2012, 5, 1026–1033. [Google Scholar] [CrossRef]
- Jafari, H.; Olowu, T.O.; Mahmoudi, M.; Sarwat, A. Optimal design of IPT bipolar power pad for roadway-powered EV charging systems. IEEE Can. J. Elect. Comput. Eng. 2021, 44, 350–355. [Google Scholar] [CrossRef]
- Bandyopadhyay, S.; Venugopal, P.; Dong, J.; Bauer, P. Comparison of Magnetic Couplers for IPT-Based EV Charging Using Multi-Objective Optimization. IEEE Trans. Veh. Technol. 2019, 68, 5416–5429. [Google Scholar] [CrossRef]
- Chen, W.; Lu, W.; Iu, H.H.C.; Fernando, T. Compensation Network Optimal Design Based on Evolutionary Algorithm for Inductive Power Transfer System. IEEE Trans Circuits Syst I Regul Pap. 2020, 67, 5664–5674. [Google Scholar] [CrossRef]
- Yao, Y.; Wang, Y.; Liu, X.; Pei, Y.; Xu, D.; Liu, X. Particle Swarm Optimization-Based Parameter Design Method for S/CLC-Compensated IPT Systems Featuring High Tolerance to Misalignment and Load Variation. IEEE Trans. Power Electron. 2019, 34, 5268–5282. [Google Scholar] [CrossRef]
- Ramezani, A.; Farhangi, S.; Iman-Eini, H.; Farhangi, B.; Rahimi, R.; Moradi, G.R. Optimized LCC-Series Compensated Resonant Network for Stationary Wireless EV Chargers. IEEE Trans. Ind. Electron. 2018, 66, 2756–2765. [Google Scholar] [CrossRef]
- Van Veldhuizen, D.A.; Zydallis, J.B.; Lamont, G.B. Considerations in engineering parallel multiobjective evolutionary algorithms. IEEE Trans. Evol. Comput. 2003, 7, 144–173. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the International Conference on Neural Networks (Proceedings of ICNN’95), Perth, WA, USA, 27 November–1 December 1995. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Input DC voltage Ud | 100 V |
| Nominal output level URO_D/IRO_D | 100 V/1 A |
| Switching frequency fs | 85 kHz |
| Coupling range | 0.25~0.5 |
| Load range | 50~100 Ω |
| Inductance of transmitting coil LP | 270 μH |
| Inductance of receiving coil LS | 270 μH |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| w | 0.7 | Np (Population) | 200 |
| c1 | 1.8 | T (Iterations) | 200 |
| c2 | 1.8 | Rep (Repository) | 200 |
| Li | 10–1000 μH | Cj | 0.1–800 nF |
| ILmax | 16 A | UCmax | 600 V |
| Type | Parameters | Designed | Measured |
|---|---|---|---|
| CCO | LP1 | 147.6 μH | 147.7 μH |
| CP1 | 41.87 nF | 41.97 nF | |
| CP2 | 214.88 nF | 214.90 nF | |
| CS | 8.77 nF | 8.47 nF | |
| CVO | LP1 | 206.51 μH | 206.71 μH |
| CP1 | 33.64 nF | 33.66 nF | |
| CP2 | 692.13 nF | 698.33 nF | |
| CS | 11.82 nF | 11.52 nF |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, J.; Liu, R.; Tong, Q.; Yang, X.; Liu, Q.; Yao, A. Multi-Objective Optimization of LCC-S-Compensated IPT System for Improving Misalignment Tolerance. Appl. Sci. 2023, 13, 3666. https://doi.org/10.3390/app13063666
Yang J, Liu R, Tong Q, Yang X, Liu Q, Yao A. Multi-Objective Optimization of LCC-S-Compensated IPT System for Improving Misalignment Tolerance. Applied Sciences. 2023; 13(6):3666. https://doi.org/10.3390/app13063666
Chicago/Turabian StyleYang, Junfeng, Rui Liu, Qingbin Tong, Xu Yang, Qiujiang Liu, and Aifen Yao. 2023. "Multi-Objective Optimization of LCC-S-Compensated IPT System for Improving Misalignment Tolerance" Applied Sciences 13, no. 6: 3666. https://doi.org/10.3390/app13063666