
Characteristics of Dangerous Scenarios between Vehicles Turning Right and Pedestrians under Left-Hand Traffic


Abstract
:1. Introduction
2. Materials and Methods
2.1. Near-Miss Incident Data
2.2. Road Environment
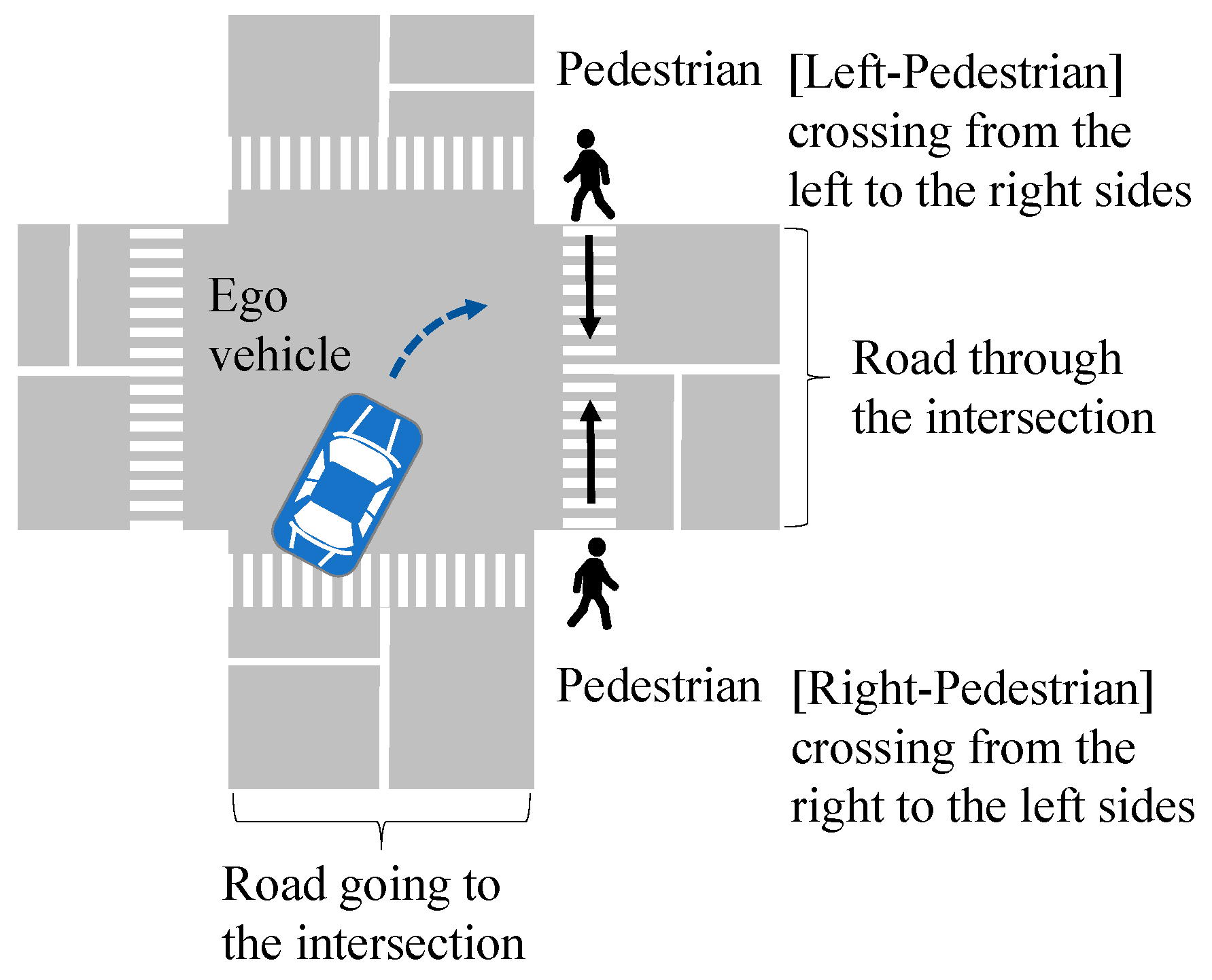
2.3. Pedestrian Crossing Directions and Place (Crosswalk/Non-Crosswalk)
2.4. Ego Vehicle Travel Speed
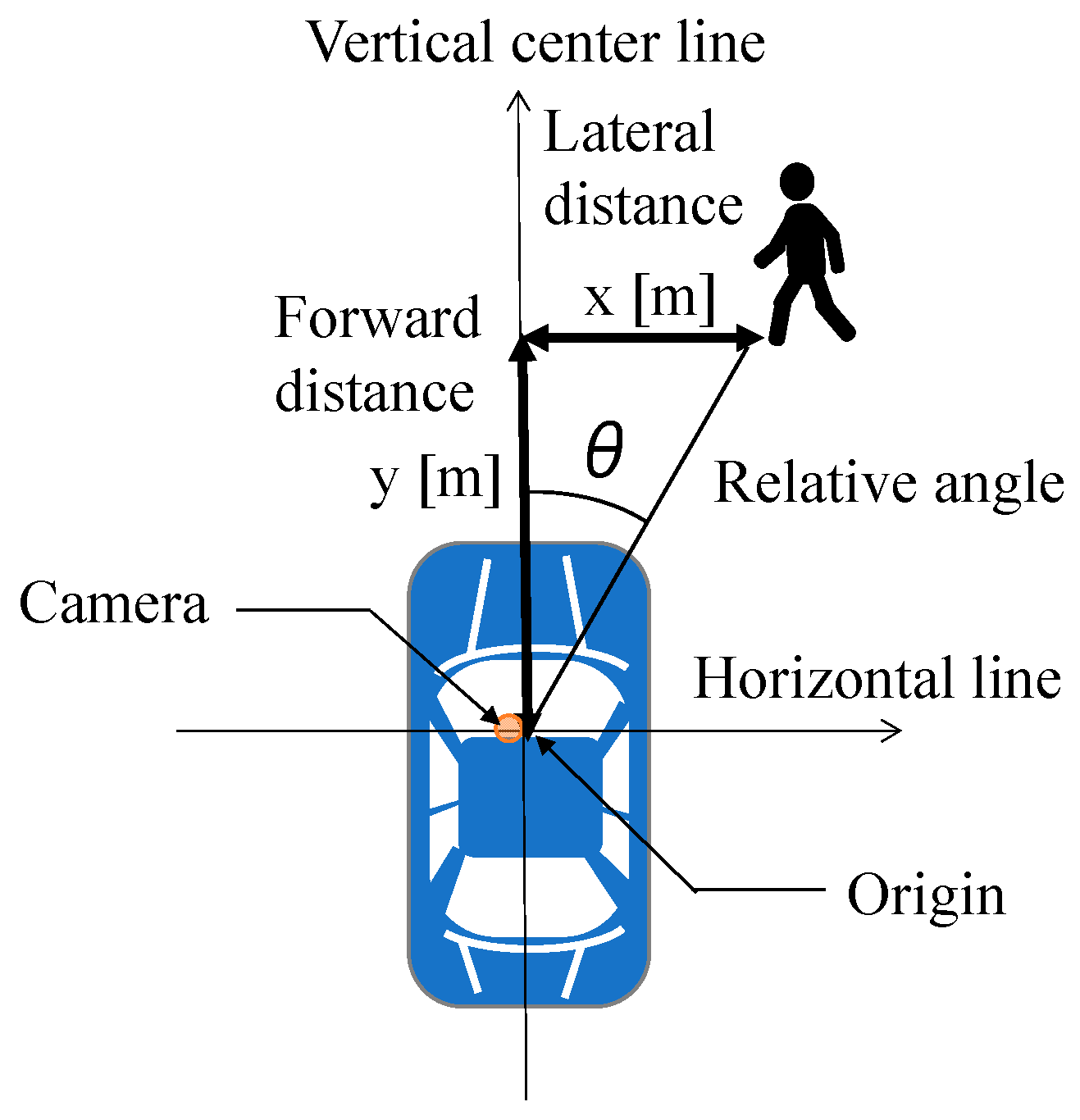
2.5. Relative Position of a Pedestrian from an Ego Vehicle
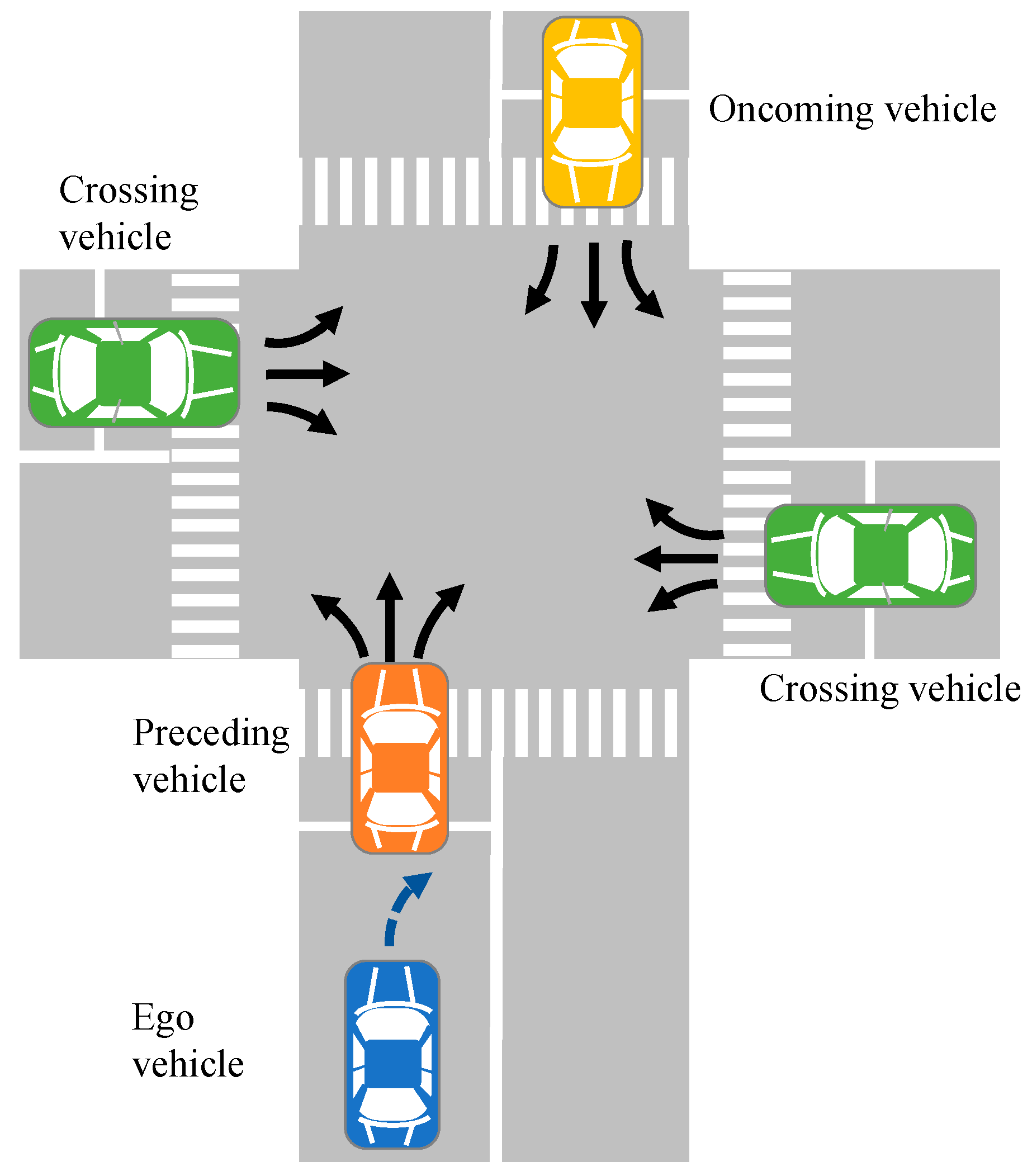
2.6. Existence of Other Vehicles
2.7. Data Analysis
3. Results
3.1. Near-Miss Incidents between a Right-Turning Vehicle and a Pedestrian According to Time Zone (Daytime and Night-Time)
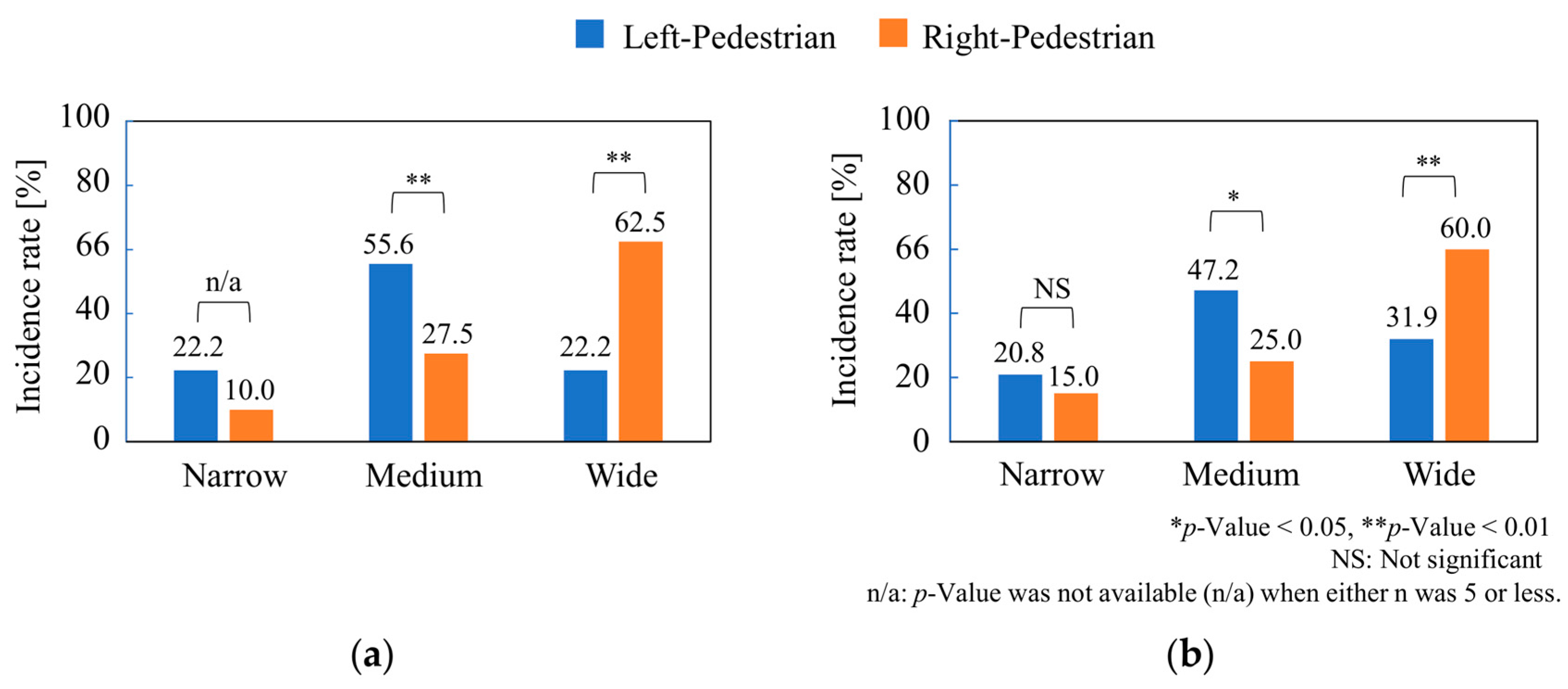
3.2. Road Width
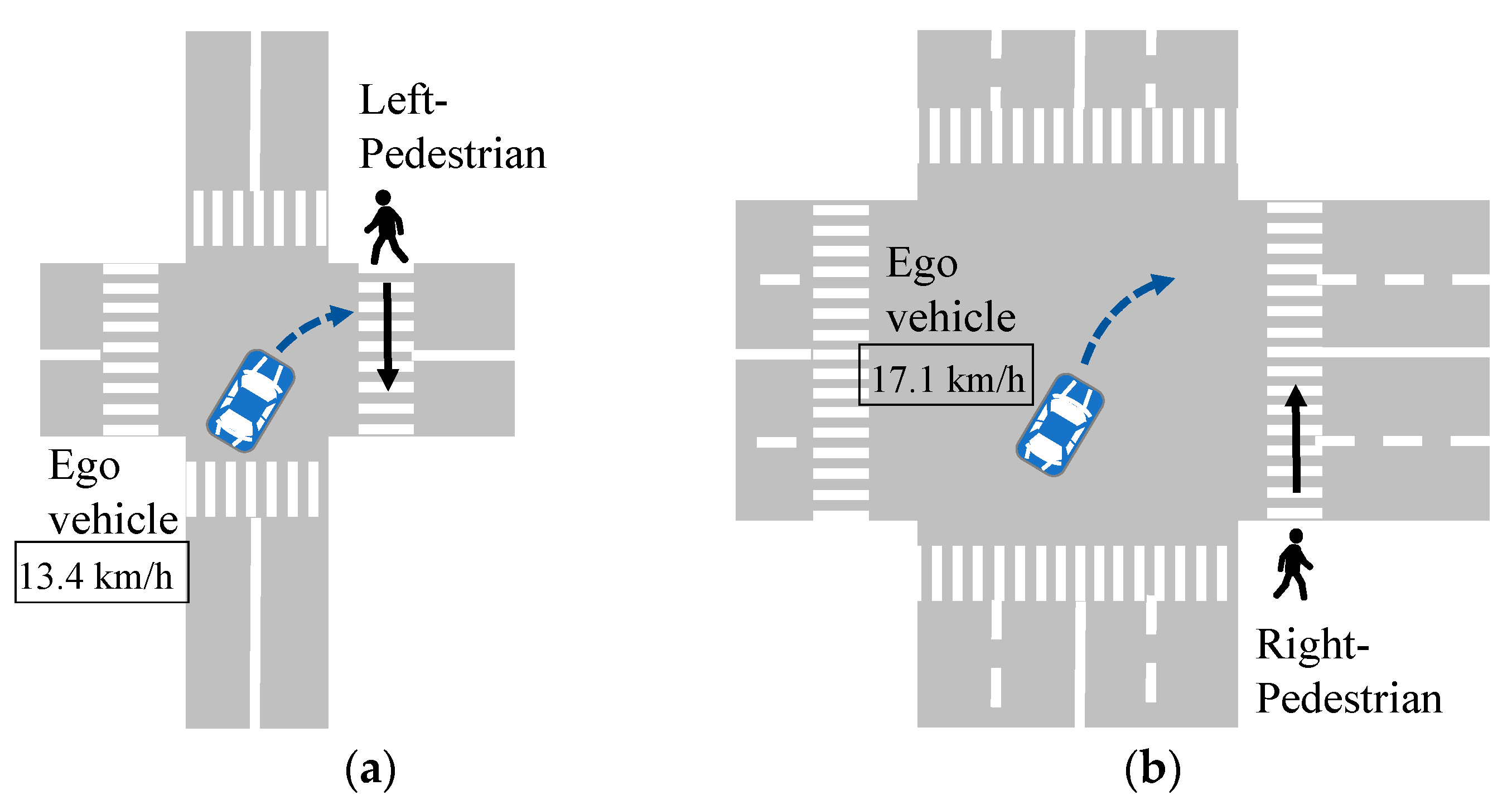
3.3. Ego Vehicle Travel Speed
3.4. Existence of Other Vehicles
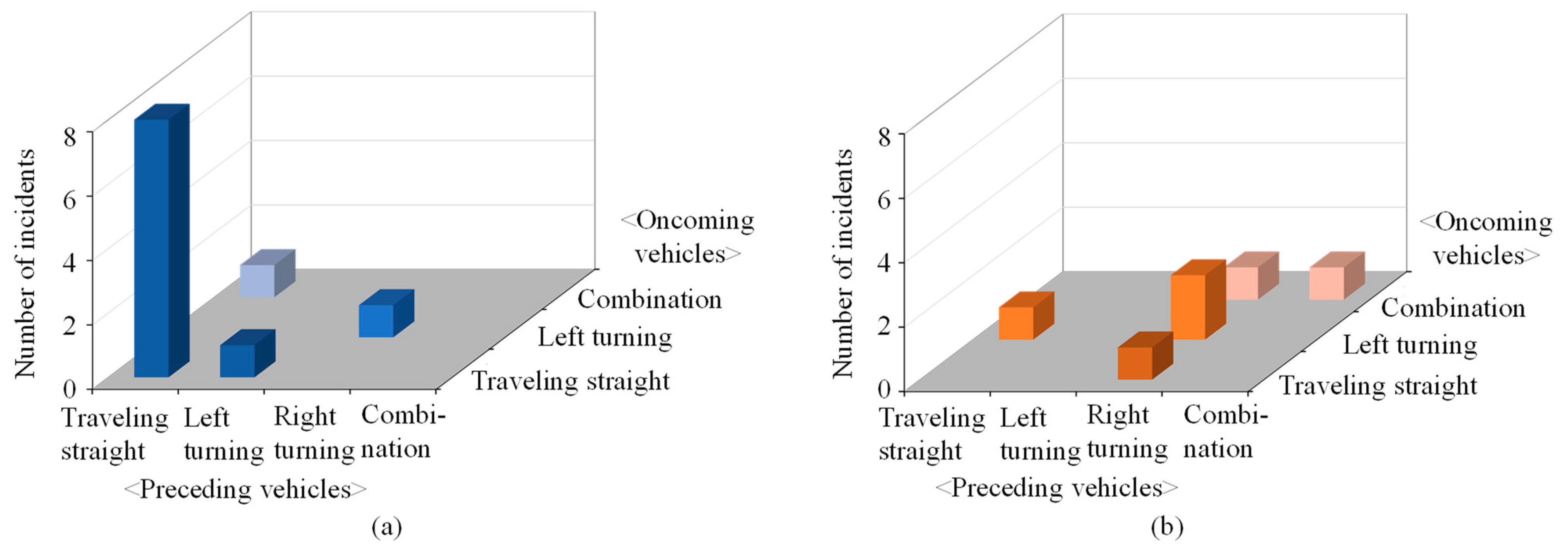
3.5. Relationship of Numbers and/or Travel Directions of Other Vehicles
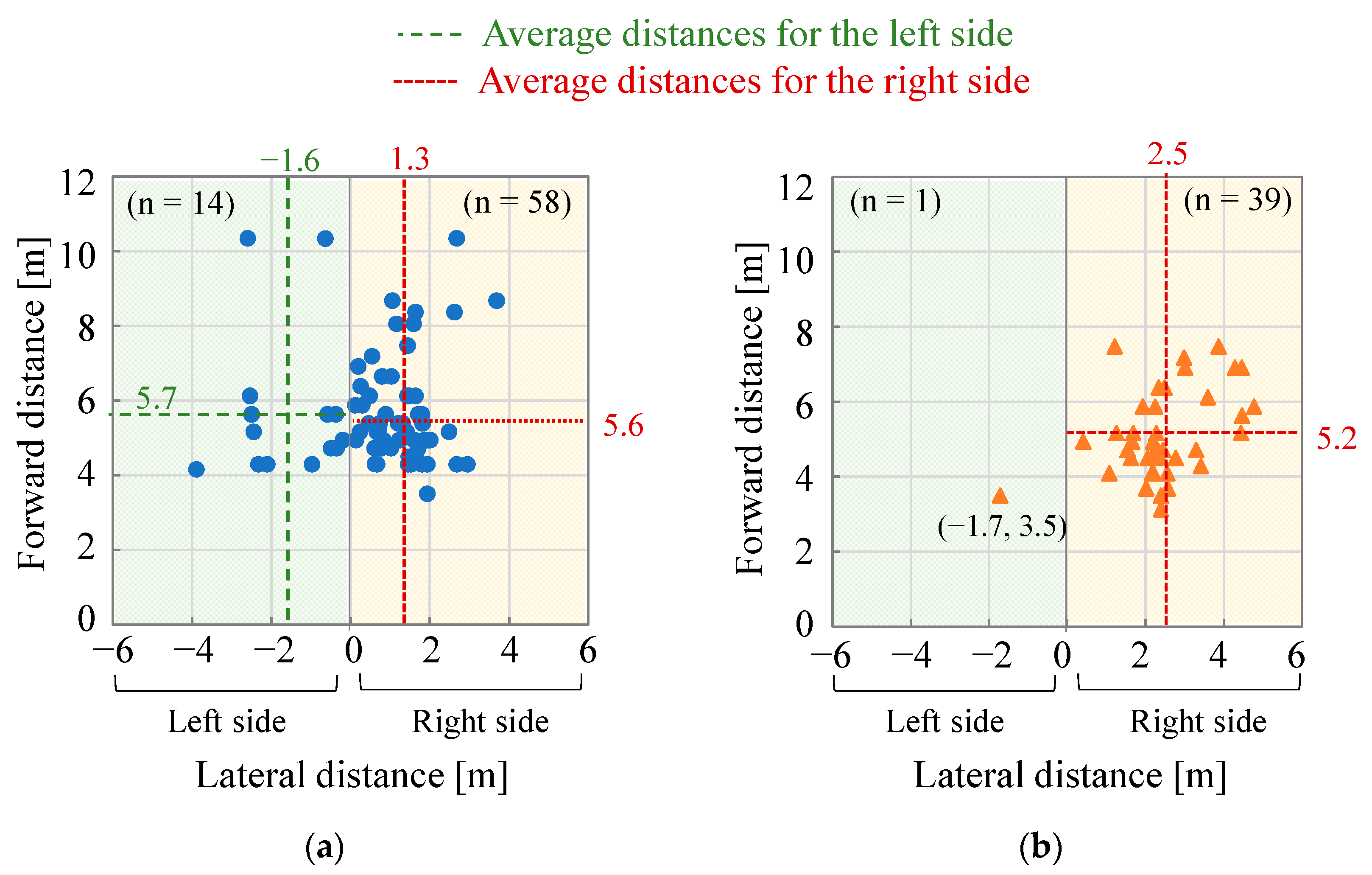
3.6. Relative Positions of Ego Vehicles and Pedestrians
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Institute for Traffic Accident Research and Data Analysis of Japan (ITARDA). Annual Traffic Accident Report in 2021; ITARDA: Tokyo, Japan, 2022. (In Japanese) [Google Scholar]
- Bagheri, M.; Siekkinen, M.; Nurminen, J.K. Cellular-based vehicle to pedestrian adaptive communication for collision avoidance. In Proceedings of the IEEE international Conference on Connected Vehicles and Exposure, Vienna, Austria, 3–7 November 2014; Available online: https://www.researchgate.net/publication/308835284_Cellular-based_vehicle_to_pedestrian_V2P_adaptive_communication_for_collision_avoidance:450-456 (accessed on 3 February 2022).
- Anaya, J.J.; Merdrignac, P.; Shagdar, O.; Nashashibi, F.; Naranjo, J.E. Vehicle to pedestrian communications for protection of vulnerable road users. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium, Dearborn, Dearborn, MI, USA, 8–11 June 2014; pp. 1037–1042. [Google Scholar] [CrossRef] [Green Version]
- Sugimoto, C.; Nakamura, Y.; Hashimoto, T. Development of pedestrian-to-vehicle communication system prototype for pedestrian safety using both wide-area and direct communication. In Proceedings of the International Conference on Advanced Information Networking and Applications (AINA), Gino-wan, Japan, 25–28 March 2008; pp. 64–69. Available online: https://ieeexplore.ieee.org/document/4482690/authors#authors (accessed on 3 February 2022). [CrossRef]
- David, K.; Flach, A. Car-2-X and pedestrian safety. IEEE Veh. Technol. Mag. 2010, 5, 70–76. [Google Scholar] [CrossRef]
- Wu, X.; Miucic, R.; Yang, S.; Al-Stouhi, S.; Misener, J.; Bai, S.; Chan, W. Cars talk to phones: A DSRC Based vehicle–pedestrian safety system. In Proceedings of the 80th IEEE Veh Technol Conference, Vancouver, BC, Canada, 14–17 September 2014; pp. 1–7. [Google Scholar] [CrossRef]
- Themann, P.; Kotte, J.; Raudszus, D.; Eckstein, L. Impact of positioning uncertainty of vulnerable road users on risk minimization in collision avoidance systems. In Proceedings of the 81st IEEE Intelligent Veh Symposium, Glasgow, UK, 11–14 May 2015. [Google Scholar] [CrossRef]
- He, S.; Li, J.; Qiu, T.Z. Vehicle-to-pedestrian communication modeling and collision avoiding method in connected vehicle environment. Transp. Res. Rec. 2017, 2621, 21–30. [Google Scholar] [CrossRef]
- Lee, I.; Luan, B. Design of Autonomous Emergency Braking System Based on Impedance Control for 3-Car Driving Scenario, Paper (2016-01-1453); World Congress & Exposition; Society of Automotive Engineers: Detroit, MI, USA, 2016. [Google Scholar]
- Edwards, M.; Nathanson, A.; Wisch, M. Estimate of potential benefit for Europe of fitting autonomous emergency braking (AEB) systems for pedestrian protection to passenger cars. Traffic Inj. Prev. 2014, 15 (Suppl. S1), S173–S182. [Google Scholar] [CrossRef]
- Hamdane, H.; Serre, T.; Masson, C.; Anderson, R. Issues and challenges for pedestrian active safety systems based on real world accidents. Accid. Anal. Prev. 2015, 82, 53–60. [Google Scholar] [CrossRef] [Green Version]
- Rosen, E. Autonomous emergency braking for vulnerable road users. In Proceedings of the IRCOBI Conference, Gothenburg, Sweden, 11–13 September 2013; Available online: http://www.ircobi.org/wordpress/downloads/irc13/pdf_files/71.pdf (accessed on 3 February 2022).
- Cicchino, J.B. Effects of automatic emergency braking systems on pedestrian crash risk. Accid. Anal. Prev. 2022, 172, 106686. [Google Scholar] [CrossRef] [PubMed]
- Haus, S.H.; Sherony, R.; Gabler, H.C. Estimated benefit of automated emergency braking systems for vehicle–pedestrian crashes in the United States. Traffic Inj. Prev. 2019, 20 (Suppl. S1), S171–S176. [Google Scholar] [CrossRef] [Green Version]
- Matsui, Y.; Oikawa, S. Situational characteristics of fatal pedestrian accidents involving vehicles traveling at low speeds in Japan. Traffic Inj. Prev. 2019, 20, S1–S6. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Institute for Traffic Accident Research and Data Analysis of Japan (ITARDA). ITARDA Information No. 136; ITARDA: Tokyo, Japan, 2020. (In Japanese) [Google Scholar]
- Ding, Z.; Sun, C.; Zhou, M.; Liu, Z.; Wu, C. Intersection vehicle turning control for fully autonomous driving scenarios. Sensors 2021, 21, 3995. [Google Scholar] [CrossRef]
- Ben-Akiva, M.; Lermans, S.R. Discrete Choice Analysis: Theory and Application to Travel Demand; The MIT Press: Cambridge, MA, USA, 1985. [Google Scholar]
- Sahu, P.; Maji, A.; Nath, B.; Roh, H. Questionnaire based study of drivers’ error and violation at four-legged signalized intersection. Transportat. Lett. Int. J. Transport. Res. 2022, 14, 944–955. [Google Scholar] [CrossRef]
- Saito, Y.; Sugaya, F.; Inoue, S.; Raksincharoensak, P.; Inoue, H. A context-aware driver model for determining recommended speed in blind intersection situations. Accid. Anal. Prev. 2021, 163, 106447. [Google Scholar] [CrossRef]
- Shen, X.; Raksincharoensak, P. Statistical models of near-accident event and pedestrian behavior at non-signalized intersections. J. Appl. Stat. 2022, 49, 4028–4048. [Google Scholar] [CrossRef] [PubMed]
- Min, K.; Ando, A. Analysis on characteristics of dangerous driving events via recorded data of drive-recorder. Transp. Res. Procedia 2020, 48, 1342–1363. [Google Scholar] [CrossRef]
- Matsui, Y.; Hitosugi, M.; Takahashi, K.; Doi, T. Situations of car-to-pedestrian contact. Traffic Inj. Prev. 2013, 14, 73–77. [Google Scholar] [CrossRef] [PubMed]
- Nagai, M. Current situation in registration and application of drive recorder database. In Proceedings of the Forum in JSAE Spring Convention in 2009 “What the Drive Recorder can contribute for Traffic Safety”, Yokohama, Japan, 20 May 2009. (In Japanese). [Google Scholar]
- Near-Miss Incident Database Usage Manual; Drive Recorder Data Center of Smart Mobility Research Center in Tokyo University Agriculture and Technology: Tokyo, Japan, 2021. (In Japanese)
- Distance Measurement Tool Manual; Drive Recorder Data Center of Smart Mobility Research Center in Tokyo University Agriculture and Technology: Tokyo, Japan, 2021. (In Japanese)
- Koh, P.P.; Wong, Y.D.; Chandrasekar, P. Safety evaluation of pedestrian behaviour and violations at signalized pedestrian crossings. Saf. Sci. 2014, 70, 143–152. [Google Scholar] [CrossRef]
- Institute for Traffic Accident Research and Data Analysis of Japan (ITARDA). Behavior Analysis of Ego Vehicles during Right Turning before Impact Events; ITARDA: Tokyo, Japan, 2022. (In Japanese) [Google Scholar]
- Matsui, Y.; Oikawa, S.; Sorimachi, K.; Imanishi, A.; Fujimura, T. Association of impact velocity with risks of serious injuries and fatalities to pedestrians in commercial truck–pedestrian accidents. Stapp. Car Crash. J. 2016, 60, 165–182. [Google Scholar]
- Hussain, Q.; Feng, H.; Grzebieta, R.; Brijs, T.; Olivier, J. The relationship between impact speed and the probability of pedestrian fatality during a vehicle-pedestrian crash: A systematic review and meta-analysis. Accid. Anal. Prev. 2019, 129, 241–249. [Google Scholar] [CrossRef]
- Mori, M.; Tsukaguchi, H. Pedestrian movements on footways. Proc. Jpn. Soc. Civ. Eng. 1977, 1977, 99–108. [Google Scholar] [CrossRef]
- Test protocol-AEB/LSS VRS systems version 4.3; European New Car Assessment Programme (Euro NCAP). Available online: https://cdn.euroncap.com/media/75436/euro-ncap-aeb-lss-vru-test-protocol-v43.pdf (accessed on 3 February 2022).
- Abdel-Aty, M.; Cai, Q.; Wu, Y.; Zheng, O. Evaluation of automated emergency braking system’s avoidance of pedestrian crashes at intersections under occluded conditions within a virtual simulator. Accid. Anal. Prev. 2022, 176, 106797. [Google Scholar] [CrossRef] [PubMed]
- Hu, W.; Cicchino, J.B. Relationship of pedestrian crash types and passenger vehicle types. J. Saf. Res. 2022, 82, 392–401. [Google Scholar] [CrossRef]
- Obeidat, M.S.; Altheeb, N.F.; Momani, A.; Al Theeb, N. Analyzing the invisibility angles formed by vehicle blind spots to increase driver’s field of view and traffic safety. Int. J. Occup. Saf. Ergon. 2022, 28, 129–138. [Google Scholar] [CrossRef]
- Santos, A.C.; Gerez, A.; Pádua, A.; Genaro, P.; Silva, R.; Ferreira, S. The influence of A-pillar obscuration/location on driver visibility. SAE Tech. Pap. 2020, 2019-36-0062. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Comparison | Items |
|---|---|
| Day vs. night | (1) Near-miss incidents between a right-turning vehicle and a pedestrian |
| Left-Pedestrian vs. Right-Pedestrian | (2) Road width |
| (3) Ego vehicle travel speed | |
| (4) Existence of other vehicles | |
| (5) Relationship of numbers and/or travel directions of other vehicles | |
| (6) Relative positions of ego vehicles and pedestrians |
| Situation | Daytime | Night-Time | A [%] vs. B [%] p-Value (1), (2) | |||
|---|---|---|---|---|---|---|
| n | A [%] | n | B [%] | |||
| Day/Night (Total n = 112) | 43 | 38.4 | 69 | 61.6 | -- | |
| Weather | ||||||
| Sunny | 35 | 81.4 | 53 | 76.8 | 0.565 | |
| Rain | 7 | 16.3 | 15 | 21.7 | 0.479 | |
| Snow | 1 | 2.3 | 1 | 1.4 | n/a | |
| Direction of a pedestrian crossing | ||||||
| Left-to-right side (Left) (Left) mirror | 28 | 65.1 | 44 | 63.8 | 0.885 | |
| Right-to-left side (Right) | 15 | 34.9 | 25 | 36.2 | 0.885 | |
| Pedestrian crossing location | ||||||
| Crosswalk | 38 | 88.4 | 61 | 88.4 | 0.996 | |
| Non-crosswalk | 5 | 11.6 | 8 | 11.6 | - | |
| Traffic lights | ||||||
| for vehicles/for pedestrians | ||||||
| with/with | 29 | 67.4 | 43 | 62.3 | 0.582 | |
| with/without | 0 | 0.0 | 8 | 11.6 | n/a | |
| without/with | 1 | 2.3 | 0 | 0.0 | n/a | |
| without/without | 13 | 30.2 | 18 | 26.1 | 0.663 | |
| Road width | ||||||
| Road to the intersection | ||||||
| Narrow | 6 | 14.0 | 14 | 20.3 | 0.394 | |
| Medium | 22 | 51.2 | 29 | 42.0 | 0.345 | |
| Wide | 15 | 34.9 | 26 | 37.7 | 0.765 | |
| Road through the intersection | ||||||
| Narrow | 8 | 18.6 | 13 | 18.8 | 0.975 | |
| Medium | 13 | 30.2 | 31 | 44.9 | 0.121 | |
| Wide | 22 | 51.2 | 25 | 36.2 | 0.119 | |
| Ego vehicle travel speed | ||||||
| ≤ 10 km/h | 10 | 23.3 | 21 | 30.4 | 0.409 | |
| ≤ 20 km/h | 25 | 58.1 | 35 | 50.7 | 0.444 | |
| ≤ 30 km/h | 8 | 18.6 | 13 | 18.8 | 0.975 | |
| Existence of classified other vehicles | ||||||
|
with without | 35 8 | 81.4 18.6 | 46 23 | 66.7 33.3 | 0.090 - | |
| Vehicle Travel Speed | Left-Pedestrian | Right-Pedestrian | A [%] vs. B [%] | ||
|---|---|---|---|---|---|
| [km/h] | N | A [%] | n | B [%] | p-Value (1) |
| ≤10 km/h | 26 | 36.1 | 5 | 12.2 | 0.007 ** |
| ≤20 km/h | 37 | 51.4 | 23 | 56.1 | 0.534 |
| ≤30 km/h | 9 | 12.5 | 12 | 31.7 | 0.023 * |
| Total | 72 | 100.0 | 40 | 100.0 | |
| Left-Pedestrian | Right-Pedestrian | ||||
|---|---|---|---|---|---|
| Average | SD | Average | SD | p-Value (1) | |
| Ego vehicle travel speed [km/h] | 13.4 | 6.3 | 17.1 | 5.7 | 0.002 ** |
| Categorized Other Vehicles by Combinations in Each Near-Miss Incident | Left-Pedestrian | Right-Pedestrian | A [%] vs. B [%] | |||
|---|---|---|---|---|---|---|
| n | A [%] | n | B [%] | p-Value (1), (2) | ||
| Existing: | ||||||
| Preceding vehicles | 17 | 23.6 | 10 | 25.0 | 0.869 | |
| Oncoming vehicles | 16 | 22.2 | 10 | 25.0 | 0.739 | |
| Crossing vehicles | 3 | 4.2 | 1 | 2.5 | n/a | |
| Preceding and oncoming vehicles | 11 | 15.3 | 6 | 15.0 | 0.969 | |
| Preceding and crossing vehicles | 3 | 4.2 | 2 | 5.0 | n/a | |
| Oncoming and crossing vehicles | 0 | 0.0 | 2 | 5.0 | n/a | |
| Sub total | 50 | 69.4 | 31 | 77.5 | 0.361 | |
| No other vehicles | 22 | 30.6 | 9 | 22.5 | 0.361 | |
| Total | 72 | 100.0 | 40 | 100.0 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Matsui, Y.; Oikawa, S. Characteristics of Dangerous Scenarios between Vehicles Turning Right and Pedestrians under Left-Hand Traffic. Appl. Sci. 2023, 13, 4189. https://doi.org/10.3390/app13074189
Matsui Y, Oikawa S. Characteristics of Dangerous Scenarios between Vehicles Turning Right and Pedestrians under Left-Hand Traffic. Applied Sciences. 2023; 13(7):4189. https://doi.org/10.3390/app13074189
Chicago/Turabian StyleMatsui, Yasuhiro, and Shoko Oikawa. 2023. "Characteristics of Dangerous Scenarios between Vehicles Turning Right and Pedestrians under Left-Hand Traffic" Applied Sciences 13, no. 7: 4189. https://doi.org/10.3390/app13074189
APA StyleMatsui, Y., & Oikawa, S. (2023). Characteristics of Dangerous Scenarios between Vehicles Turning Right and Pedestrians under Left-Hand Traffic. Applied Sciences, 13(7), 4189. https://doi.org/10.3390/app13074189