
Motor On-Line Fault Diagnosis Method Research Based on 1D-CNN and Multi-Sensor Information

Abstract
1. Introduction
2. Motor Multi-Source Information Fusion Processing
2.1. Composition of Multi-Source Sensor Information of The Motor
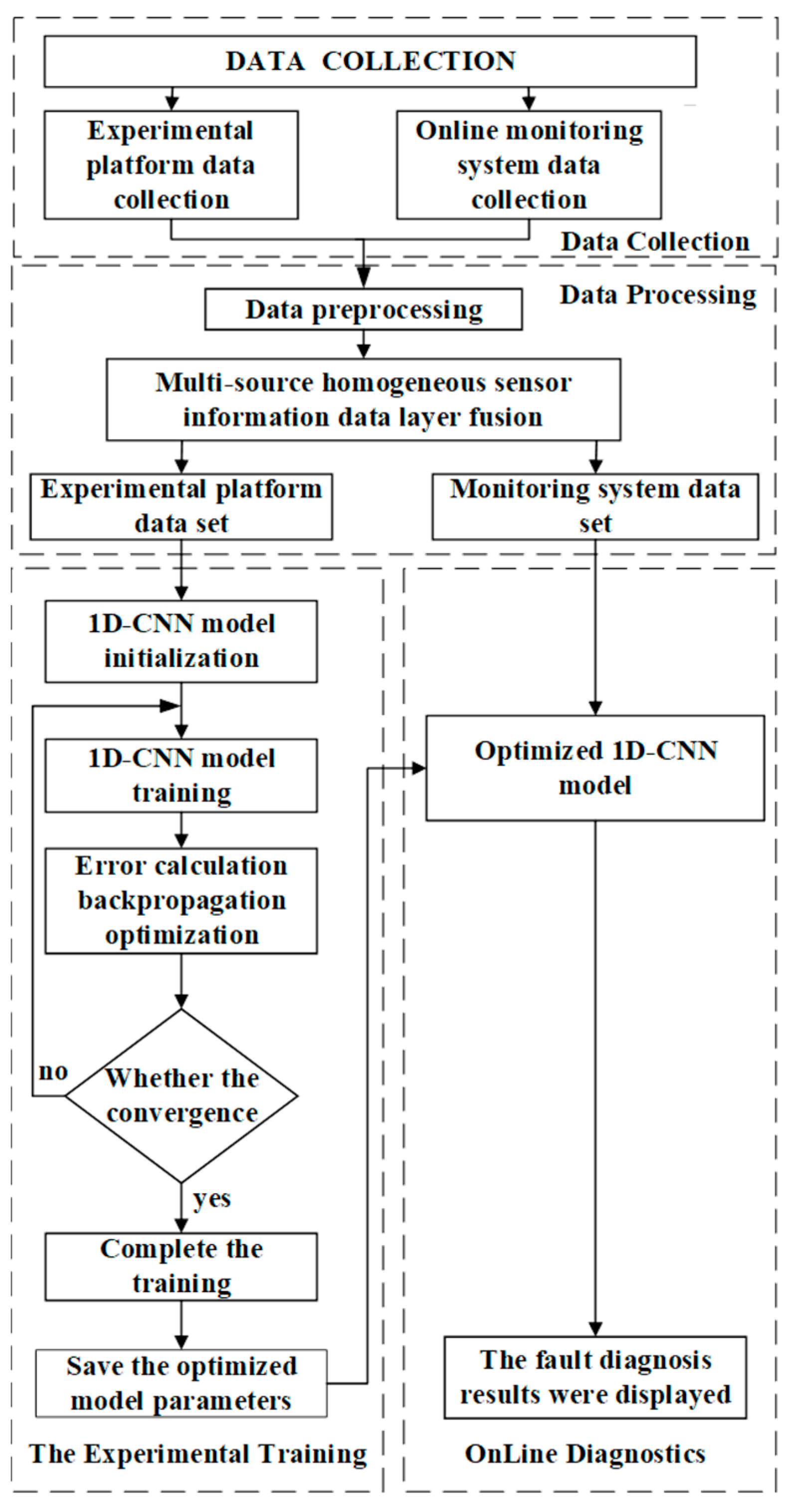
2.2. Motor Fault Diagnosis Process
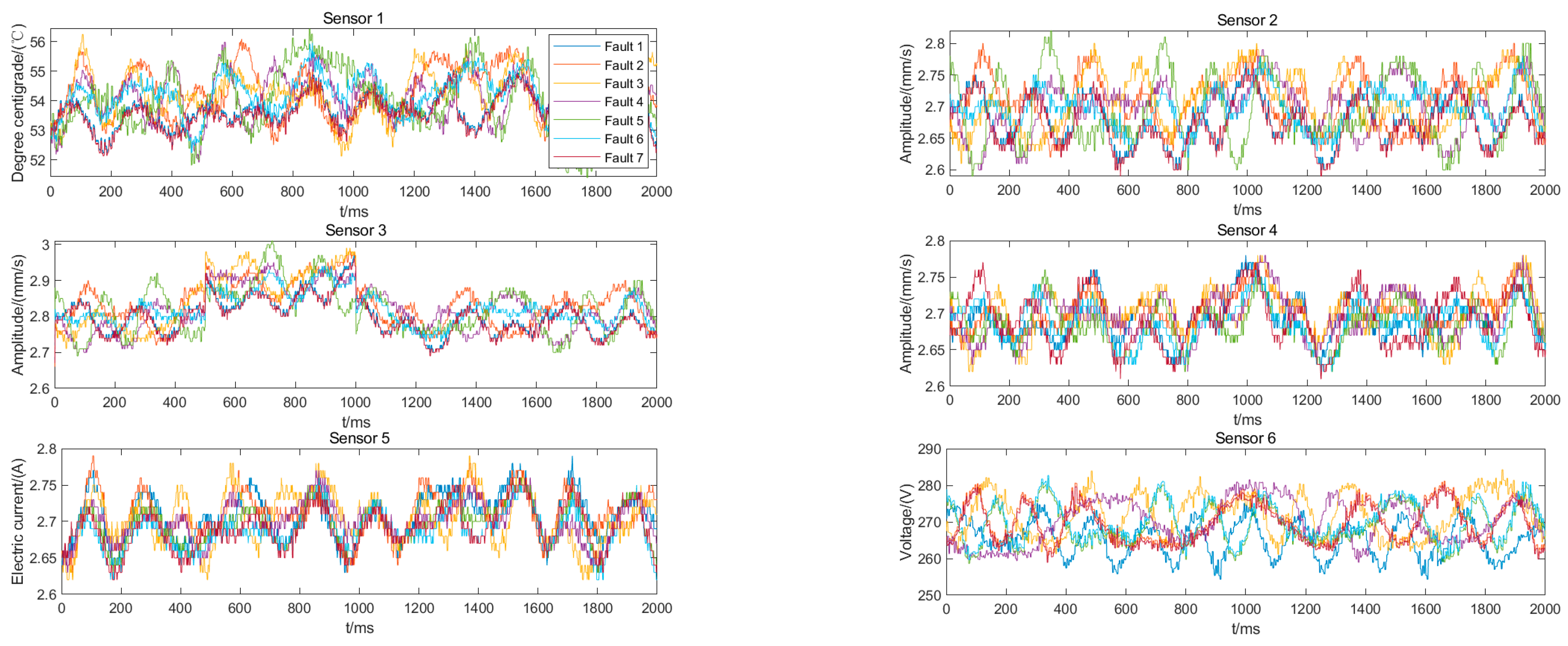
2.2.1. Data Collection
2.2.2. Data Preprocessing and Fusion Processing
2.2.3. Model Training
2.2.4. Online Diagnosis

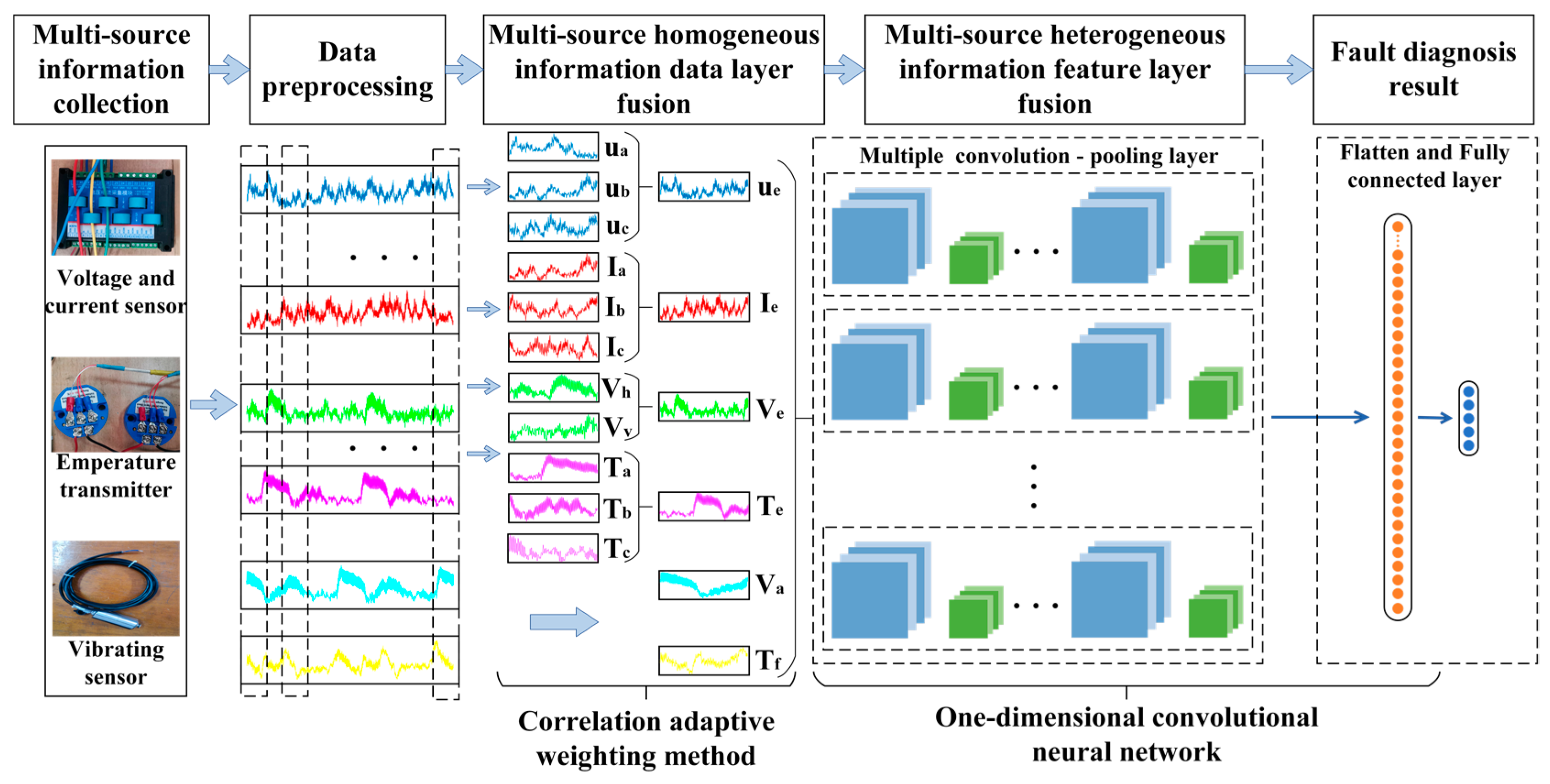
2.3. Multi-Source Sensor Information Fusion Framework
- (1)
- Multi-source sensor information data collection and preprocessing. The multi-source sensor information collected by each sensor is denoised, sliced, normalized, and divided into multiple fragments.
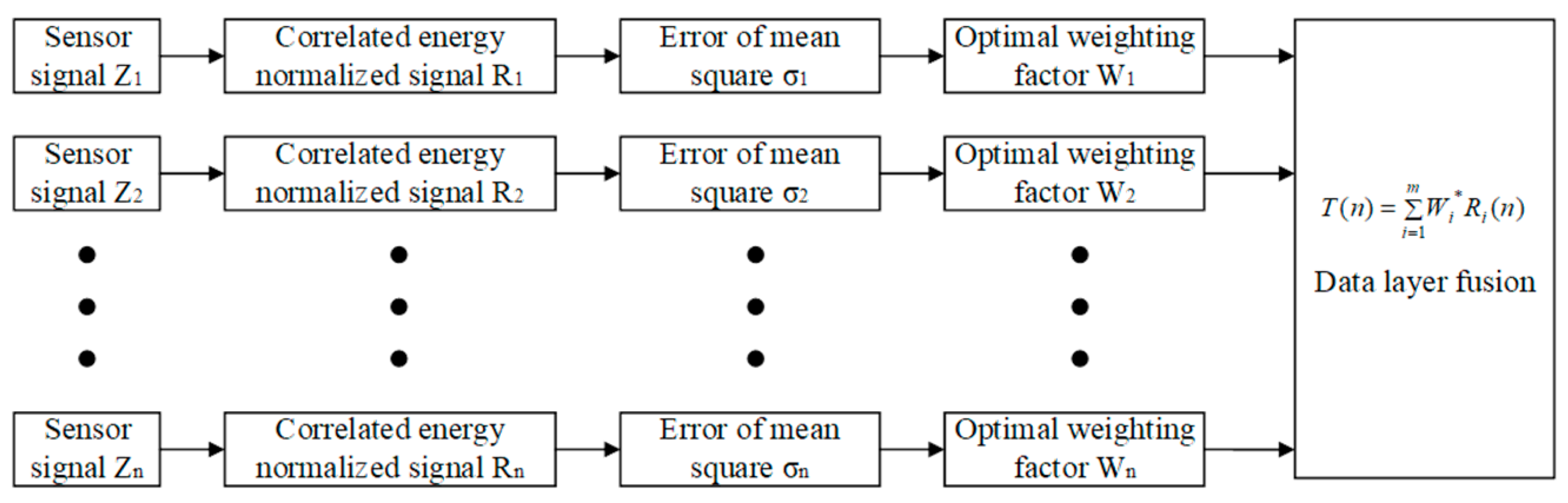
- (2)
- Multi-source homogeneous information data layer fusion. The method combining correlation and adaptive weighting is used to realize the data layer fusion of multi-source homogeneous sensor information of the motor, and the multi-source heterogeneous sensor information is formed.
- (3)
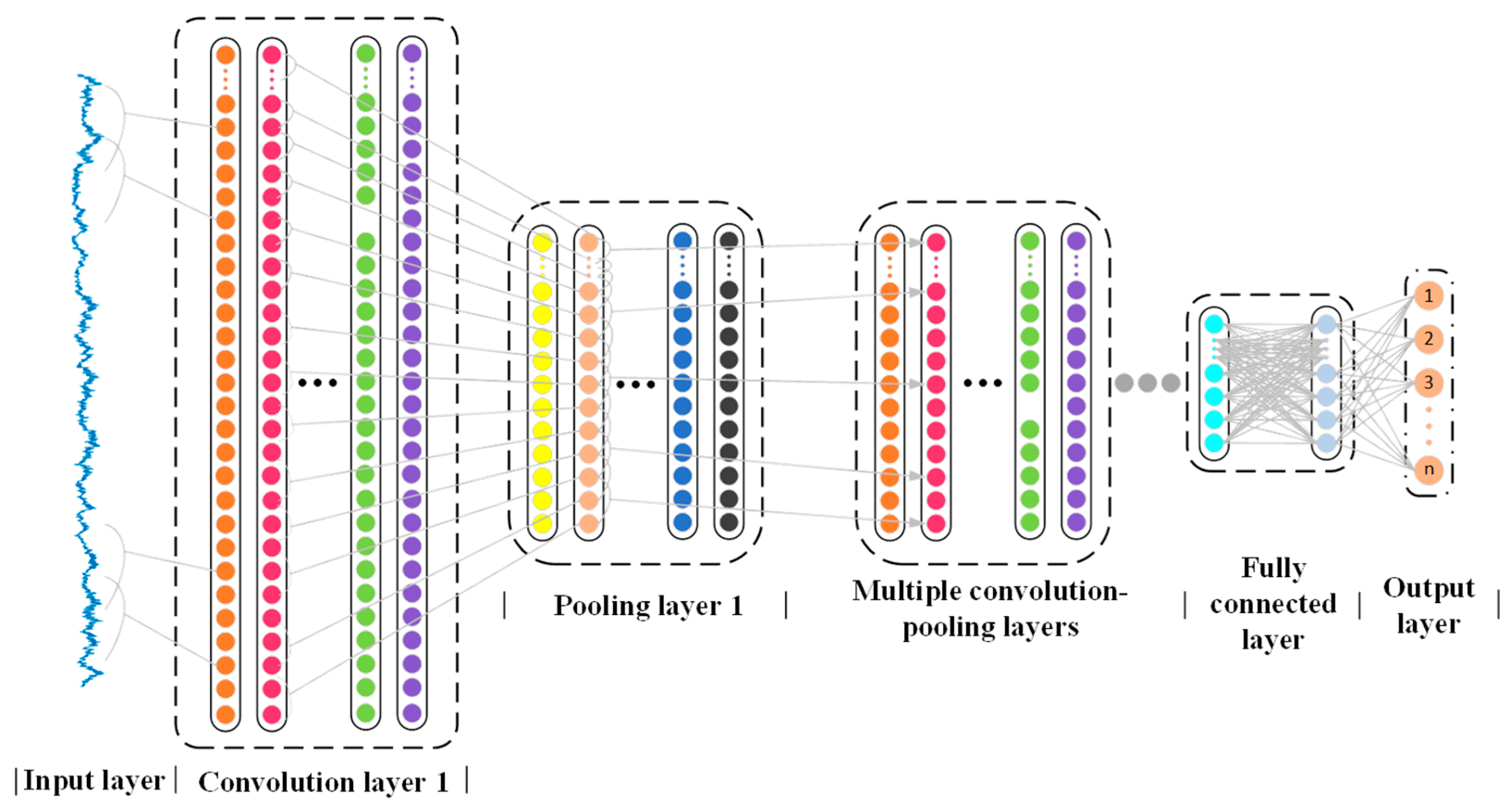
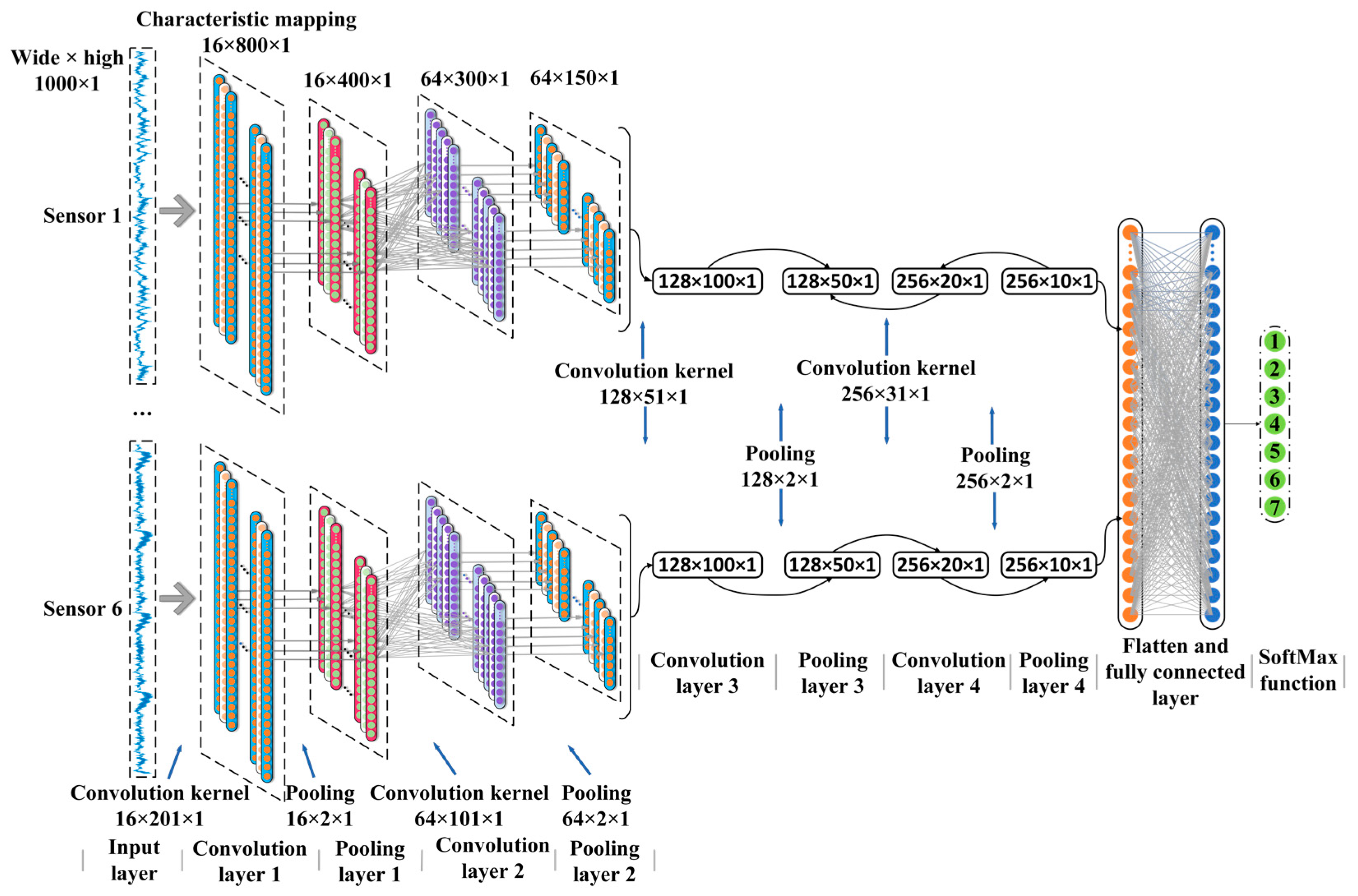
- Multi-source heterogeneous information feature layer fusion. The multi-source heterogeneous sensor information group of the motor is taken as the multi-channel inputs of 1D-CNN, and the data of each channel is subjected to multiple convolution and pooling operations to obtain its feature mappings [15]. Then the multi-source heterogeneous information features are flattened and fused by the Flatten layer.

3. Multi-Source Homogeneous Sensor Information Data Layer Fusion
4. Feature Layer Fusion of Multi-Source Heterogeneous Sensors Based on 1D-CNN
4.1. One-Dimensional Convolutional Neural Network
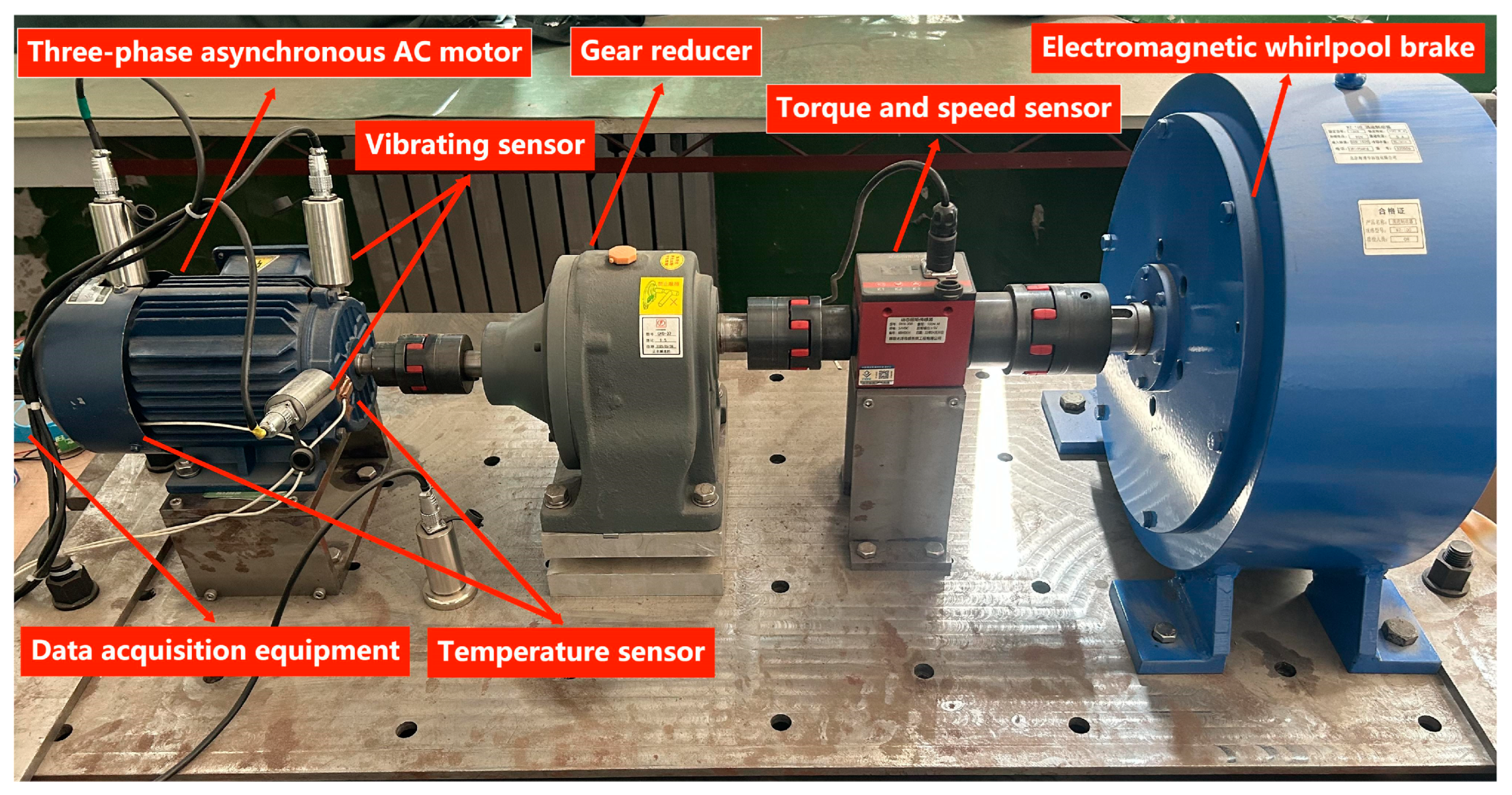
4.2. Experimental Platform Data Collection
4.3. Data Preprocessing
4.3.1. Data Slicing
4.3.2. Data Labeling
4.4. Model Building and Training
4.4.1. Model Building
4.4.2. Model Training
4.5. Interpretation of Result
4.5.1. Model Evaluation Index
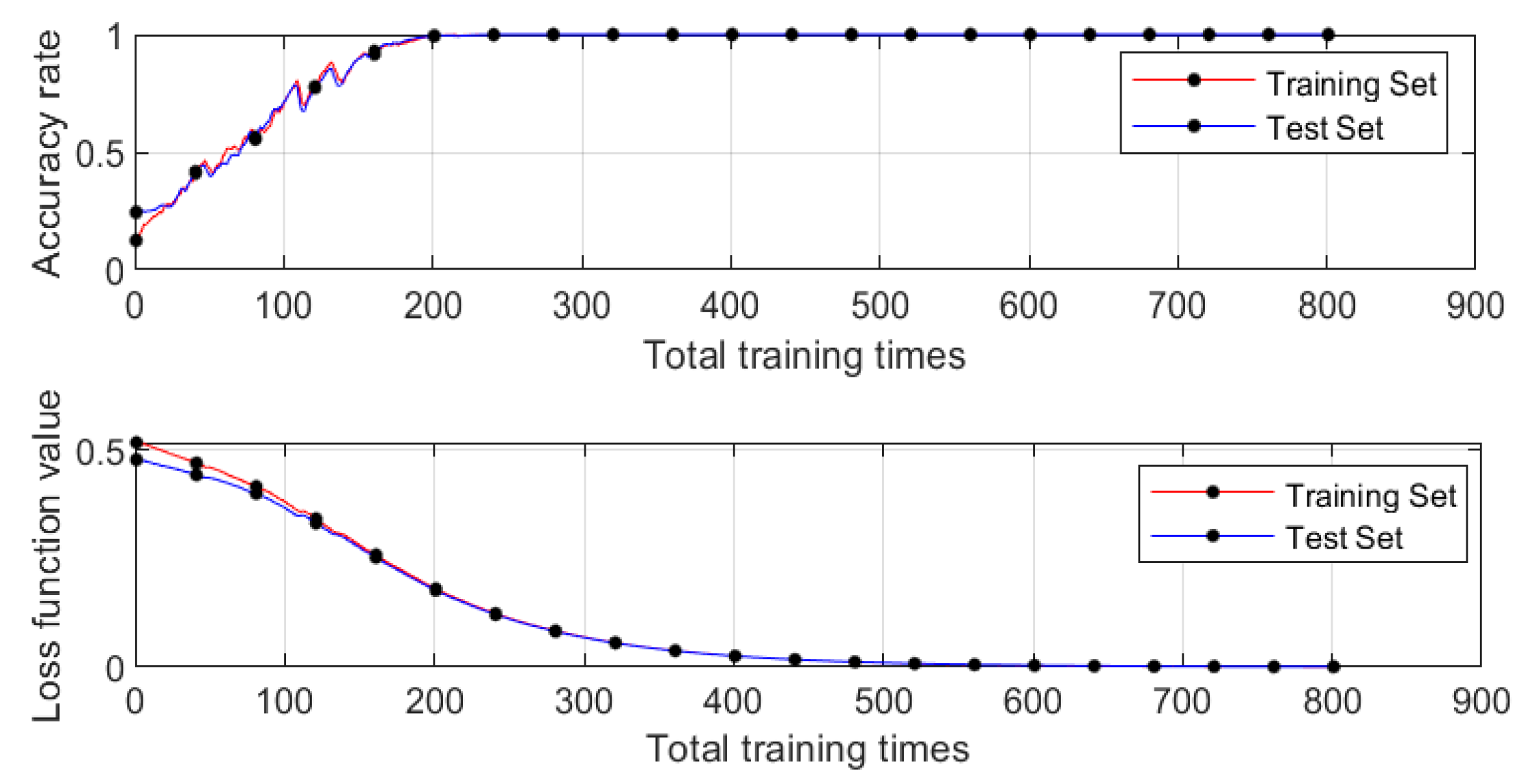
4.5.2. Accuracy Rate and Loss Function Value
4.5.3. Computational Time and Complexity of Algorithm Training
4.5.4. Comparison and Analysis with the Traditional Improved Model
5. Practical Fault Diagnosis Application
6. Conclusions
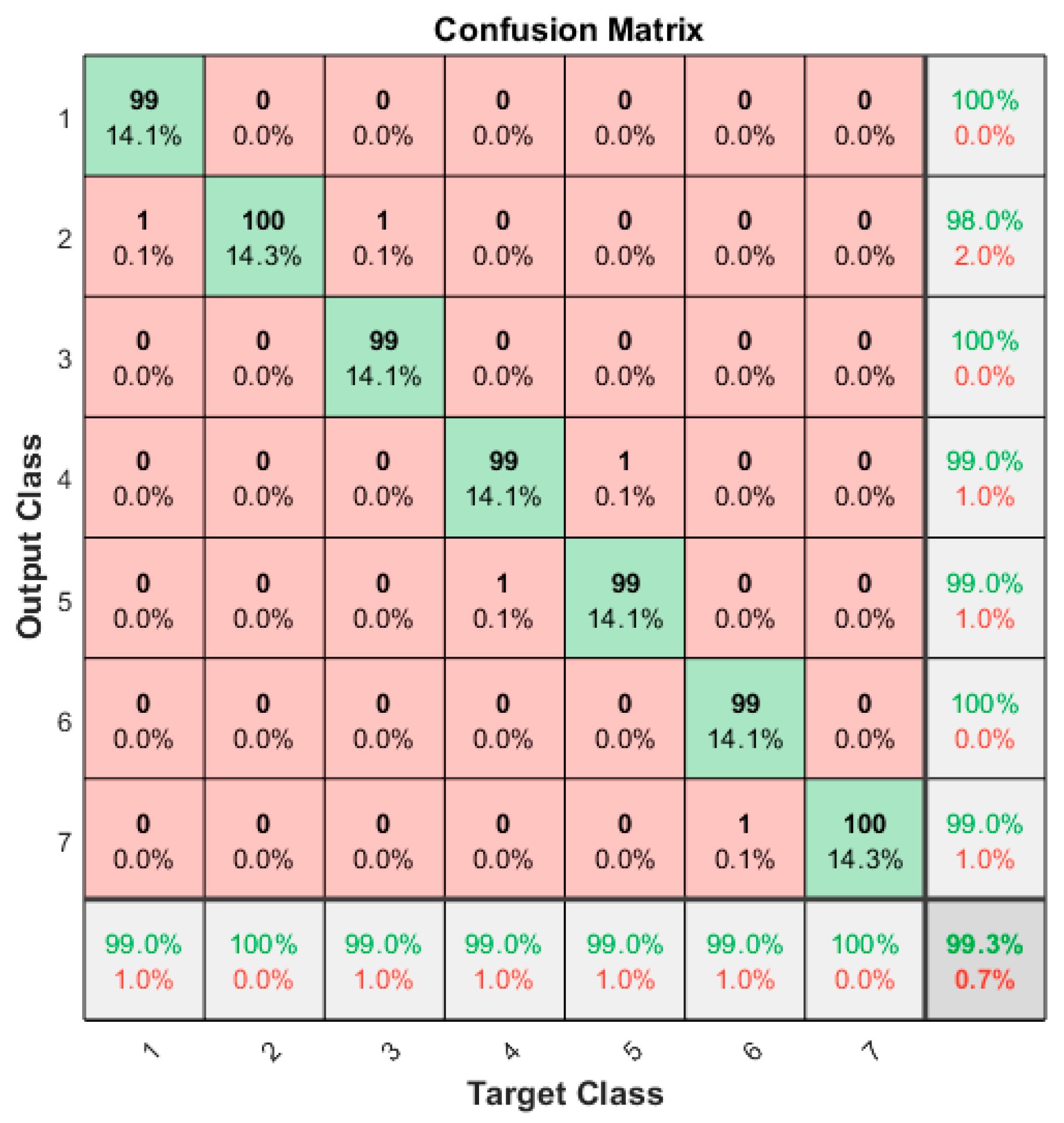
- The motor fault diagnosis model proposed in this paper, which is based on the combination of multi-sensor data layer fusion and feature layer fusion, could accurately identify the current fault category according to the collected multi-source sensor data with an accuracy rate of 99.3%.
- Compared with traditional fault diagnosis methods based on single sensor and shallow learning, the multi-sensor information fusion diagnosis model based on deep learning had higher diagnosis efficiency and accuracy, and its fault diagnosis accuracy reached 99.3%. Compared with the improved SVM, BP neural network, and single sensor analysis method, the accuracy rate of this method is improved by 36.22%, 18.2%, and 13.01%, respectively.
- After the data layer fusion of multi-source homogeneous sensors using the correlation adaptive weighting method was carried out, the fault information of multi-sensors could be fully extracted, which was conducive to improving the accuracy rate of fault diagnosis.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviation
| Symbols/Abbreviations | Full Name/Meaning |
| 1D-CNN | One-Dimensional Convolutional Neural Network |
| SVM | Support Vector Machine |
| NN classifier | Neural Network Classifier |
| MDF | Multi-sensor Data Fusion |
| (ADCNN) | Adaptive convolutional neural network |
| V | Volt |
| A | Ampere |
| mm/s | Millimeters per Second |
| °C | Degree Centigrade |
| AC | Alternating Current |
| 1D array | one-dimensional array |
| SGD | Stochastic Gradient Descent |
References
- De las Morenas, J.; Moya-Fernández, F.; López-Gómez, J.A. The Edge Application of Machine Learning Techniques for Fault Diagnosis in Electrical Machines. Sensors 2023, 23, 2649. [Google Scholar] [CrossRef] [PubMed]
- Dineva, A.; Mosavi, A.; Gyimesi, M.; Vajda, I.; Nabipour, N.; Rabczuk, T. Fault Diagnosis of Rotating Electrical Machines Using Multi-Label Classification. Appl. Sci. 2019, 9, 5086. [Google Scholar] [CrossRef]
- Chang, H.-C.; Wang, Y.-C.; Shih, Y.-Y.; Kuo, C.-C. Fault Diagnosis of Induction Motors with Imbalanced Data Using Deep Convolutional Generative Adversarial Network. Appl. Sci. 2022, 12, 4080. [Google Scholar] [CrossRef]
- Mehrdad, H.; Mohsen, Z.; Mehrdad, N.; Bilal, A. A Wavelet-Based Fault Diagnosis Approach for Permanent Magnet Synchronous Motors. IEEE Trans. Energy Convers. 2019, 34, 761–772. [Google Scholar]
- Kerboua, A.; Metatla, A.; Kelailia, R.; Batouche, M. Fault Diagnosis in Induction Motor using Pattern Recognition and Neural Networks. In Proceedings of the International Conference on Signal, Image, Vision and their Applications (SIVA), Guelma, Algeria, 26–27 November 2018; pp. 1–7. [Google Scholar]
- Kale, A.P.; Wahul, R.M.; Patange, A.D.; Soman, R.; Ostachowicz, W. Development of Deep Belief Network for Tool Faults Recognition. Sensors 2023, 23, 1872. [Google Scholar] [CrossRef]
- Kerboua, A.; Metatla, A.; Kelaiaia, R.; Mohamed, B. Real-time safety monitoring in the induction motor using deep hierarchic long short-term memory. Int. J. Adv. Manuf. Technol. 2018, 99, 2245–2255. [Google Scholar] [CrossRef]
- Patil, S.S.; Pardeshi, S.S.; Patange, A.D. Health Monitoring of Milling Tool Inserts Using CNN Architectures Trained by Vibration Spectrograms. CMES-Comput. Model. Eng. Sciences. 2023, 136, 177–199. [Google Scholar] [CrossRef]
- Junior, R.F.R.; Dos Santos Areias, I.A.; Campos, M.M.; Teixeira, C.E.; Da Silva, L.E.B.; Gomes, G.F. Fault detection and diagnosis in electric motors using 1d convolutional neural networks with multi-channel vibration signals. Measurement 2022, 190, 110759. [Google Scholar] [CrossRef]
- Cheng, L.; Lu, J.; Li, S.; Ding, R.; Xu, K.; Li, X. Fusion Method and Application of Several Source Vibration Fault Signal Spatio-Temporal Multi-Correlation. Appl. Sci. 2021, 11, 4318. [Google Scholar] [CrossRef]
- Wang, X.; Mao, D.; Li, X. Bearing fault diagnosis based on vibro-acoustic data fusion and 1D-CNN network. Measurement 2021, 173, 108518. [Google Scholar] [CrossRef]
- Jing, L.; Wang, T.; Zhao, M.; Wang, P. An Adaptive Multi-Sensor Data Fusion Method Based on Deep Convolutional Neural Networks for Fault Diagnosis of Planetary Gearbox. Sensors 2017, 17, 414. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.; Peng, G.; Li, C. A New Deep Learning Model for Fault Diagnosis with Good Anti-Noise and Domain Adaptation Ability on Raw Vibration Signals. Sensors 2017, 17, 425. [Google Scholar] [CrossRef] [PubMed]
- Shao, Y.; Yuan, X.; Zhang, C.; Song, Y.; Xu, Q. A Novel Fault Diagnosis Algorithm for Rolling Bearings Based on One-Dimensional Convolutional Neural Network and INPSO-SVM. Appl. Sci. 2020, 10, 4303. [Google Scholar] [CrossRef]
- Yi, C.; Xin, L.; Hai, Z.; Jun, W.; Hai, S.; Hua, D. A novel hierarchical structural pruning-multiscale feature fusion residual network for intelligent fault diagnosis. Mech. Mach. Theory. 2023, 184, 105292. [Google Scholar]
- Shi, J.; Ren, Y.; Tang, H.; Xiang, J. hydraulic directional valve fault diagnosis using a weighted adaptive fusion of multi dimensional features of a multi-sensor. J. Zhejiang Univ.-Sci. A (Appl. Phys. Eng.) 2022, 23, 257–272. [Google Scholar] [CrossRef]
- Swapnil, K.G.; Prasad, V.K. Bearing fault diagnosis using time segmented Fourier synchrosqueezed transform images and convolution neural network. Measurement 2022, 203, 111855. [Google Scholar]
- Jia, F.; Li, S.; Shen, J.; Ma, J.; Li, N. Fault Diagnosis of Rolling Bearings Using Deep Transfer Learning and Adaptive Weighting. J. Xi’an Jiaotong Univ. 2022, 56, 1–10. [Google Scholar]
- Jiang, G.; He, H.; Yan, J.; Xie, P. Multiscale Convolutional Neural Networks for Fault Diagnosis of Wind Turbine Gearbox. IEEE Trans. Ind. Electron. 2019, 66, 3196–3207. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, E.G. ImageNet classifification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar]
- Han, J.-H.; Choi, D.-J.; Hong, S.-K.; Kim, H.-S. Motor Fault Diagnosis Using CNN Based Deep Learning Algorithm Considering Motor Rotating Speed. In Proceedings of the 6th International Conference on Industrial Engineering and Applications (ICIEA), Tokyo, Japan, 12–15 April 2019; pp. 440–445. [Google Scholar]
- Liu, Y.; Yan, X.; Zhang, C.-A.; Liu, W. An Ensemble Convolutional Neural Networks for Bearing Fault Diagnosis Using Multi-Sensor Data. Sensors 2019, 19, 5300. [Google Scholar] [CrossRef]
- Abd-Elhay, A.-E.R.; Murtada, W.A.; Youssef, M.I. A Reliable Deep Learning Approach for Time-Varying Faults Identification: Spacecraft Reaction Wheel Case Study. IEEE Access 2022, 10, 75495–75512. [Google Scholar] [CrossRef]
- Deng, X.; Liu, Q.; Deng, Y.; Mahadevan, S. An improved method to construct basic probability assignment based on the confusion matrix for classification problem. Inf. Sci. 2016, 340–341, 250–261. [Google Scholar] [CrossRef]
- Shahid, S.M.; Ko, S.; Kwon, S. Performance Comparison of 1D and 2D Convolutional Neural Networks for Real-Time Classification of Time Series Sensor Data. In Proceedings of the International Conference on Information Networking (ICOIN), Jeju-si, Republic of Korea, 11–14 January 2022; pp. 507–511. [Google Scholar]
- Li, J. A Novel Integrated SVM for Fault Diagnosis Using KPCA and GA. J. Phys. Conf. Ser. 2019, 1207, 1. [Google Scholar]
- Liu, P.; Zhang, W. A Fault Diagnosis Intelligent Algorithm Based on Improved BP Neural Network. Int. J. Pattern Recognit. Artif. Intell. 2019, 33, 9. [Google Scholar] [CrossRef]
- Bajaj, N.S.; Patange, A.D.; Jegadeeshwaran, R.; Pardeshi, S.S.; Kulkarni, K.A.; Ghatpande, R.S. Application of metaheuristic optimization based support vector machine for milling cutter health monitoring. Intell. Syst. Appl. 2023, 18, 200196. [Google Scholar] [CrossRef]
- Duan, S.; Huang, P.; Chen, M.; Wang, T.; Sun, X.; Chen, M. Semi-supervised classification of fund-us images combined with CNN and GCN. J. Appl. Clin. Med. Phys. 2022, 23, e13746. [Google Scholar] [CrossRef]
- Kimura, M. Generalized T-SNE Through the Lens of Information Geometry. IEEE Access 2021, 9, 129619–129625. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Homogeneous Sensor Information | Signal | Units |
|---|---|---|
| Multi-source similar information 1 | Phase A voltage of motor Ua | V |
| Phase A voltage of motor Ub | V | |
| Phase A voltage of motor Uc | V | |
| Multi-source similar information 2 | Stator phase A current Ia | A |
| Stator phase A current Ib | A | |
| Stator phase A current Ic | A | |
| Multi-source similar information 3 | Rotor vibrates horizontally Vh | mm/s |
| Rotor vibrates vertically Vv | mm/s | |
| Multi-source similar information 4 | A phase winding temperature Ta | °C |
| A phase winding temperature Tb | °C | |
| A phase winding temperature Tc | °C |
| Heterogeneous Sensors Information | Signal | Units |
|---|---|---|
| Multi-source heterogeneous information 1 | Fusion stator voltage Ue | V |
| Multi-source heterogeneous information 2 | Fusion stator current Ie | A |
| Multi-source heterogeneous information 3 | Fusion bearing vibration Ve | mm/s |
| Multi-source heterogeneous information 4 | Fusion temperature Te | °C |
| Multi-source heterogeneous information 5 | Rear bearing vibration Va | mm/s |
| Multi-source heterogeneous information 6 | Stator temperature Tf | °C |
| Sample Capacity (Training Set/Test Set) | Sample Width | Fault Category | Labels |
|---|---|---|---|
| 800/200 | 1000 | Fault-free motor | 1 |
| 800/200 | 1000 | Stator fault | 2 |
| 800/200 | 1000 | Rotor fault | 3 |
| 800/200 | 1000 | Bearing outer ring fault | 4 |
| 800/200 | 1000 | Bearing inner ring fault | 5 |
| 800/200 | 1000 | Bearing rolling body fault | 6 |
| 800/200 | 1000 | Synthetic fault of the front and rear bearings | 7 |
| Level Number | Layer Categories | Number of Cores/Size/Step Size | Postscript |
|---|---|---|---|
| 1 | Input layer | 6 × 1000 × 1 | Channel × dimension |
| 2 | Convolution layer | 16/201 × 1/1 | Relu |
| 3 | Pooling layer | 16/2 × 1/1 | Average pooling |
| 4 | Convolution layer | 64/101 × 1/1 | Relu |
| 5 | Pooling layer | 64/2 × 1/1 | Average pooling |
| 6 | Convolution layer | 128/51 × 1/1 | Relu |
| 7 | Pooling layer | 128/2 × 1/1 | Average pooling |
| 8 | Convolution layer | 256/31 × 1/1 | Relu |
| 9 | Pooling layer | 256/2 × 1/1 | Average pooling |
| 10 | Flatten layer | 256 | |
| 11 | Fully connected layer | 256 | Relu |
| 12 | Output layer | 7 | Softmax |
| Number of Epochs in Model Training | Computation Time | Time Complexity |
|---|---|---|
| 1 epoch | 108 s 14 ms | 104397312 |
| 20 epoch | 36 min 4 s 54 ms | 2087946240 |
| Model Name | Accuracy Rate | F1 Score |
|---|---|---|
| Multi-sensor 1D-CNN model | 99.3% | 98.95% |
| Support Vector Machine (SVM) | 63.08% | 64.49% |
| BP neural network | 81.1% | 82.3% |
| Single-sensor 1D-CNN model | 86.29% | 87.9% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, Y.; Zhang, Y.; Yang, M.; Li, C. Motor On-Line Fault Diagnosis Method Research Based on 1D-CNN and Multi-Sensor Information. Appl. Sci. 2023, 13, 4192. https://doi.org/10.3390/app13074192
Gu Y, Zhang Y, Yang M, Li C. Motor On-Line Fault Diagnosis Method Research Based on 1D-CNN and Multi-Sensor Information. Applied Sciences. 2023; 13(7):4192. https://doi.org/10.3390/app13074192
Chicago/Turabian StyleGu, Yufeng, Yongji Zhang, Mingrui Yang, and Chengshan Li. 2023. "Motor On-Line Fault Diagnosis Method Research Based on 1D-CNN and Multi-Sensor Information" Applied Sciences 13, no. 7: 4192. https://doi.org/10.3390/app13074192
APA StyleGu, Y., Zhang, Y., Yang, M., & Li, C. (2023). Motor On-Line Fault Diagnosis Method Research Based on 1D-CNN and Multi-Sensor Information. Applied Sciences, 13(7), 4192. https://doi.org/10.3390/app13074192