
Vehicle Rollover Warning and Control Based on Attitude Detection and Fuzzy PID



Abstract
:1. Introduction
2. Vehicle Dynamics Modeling
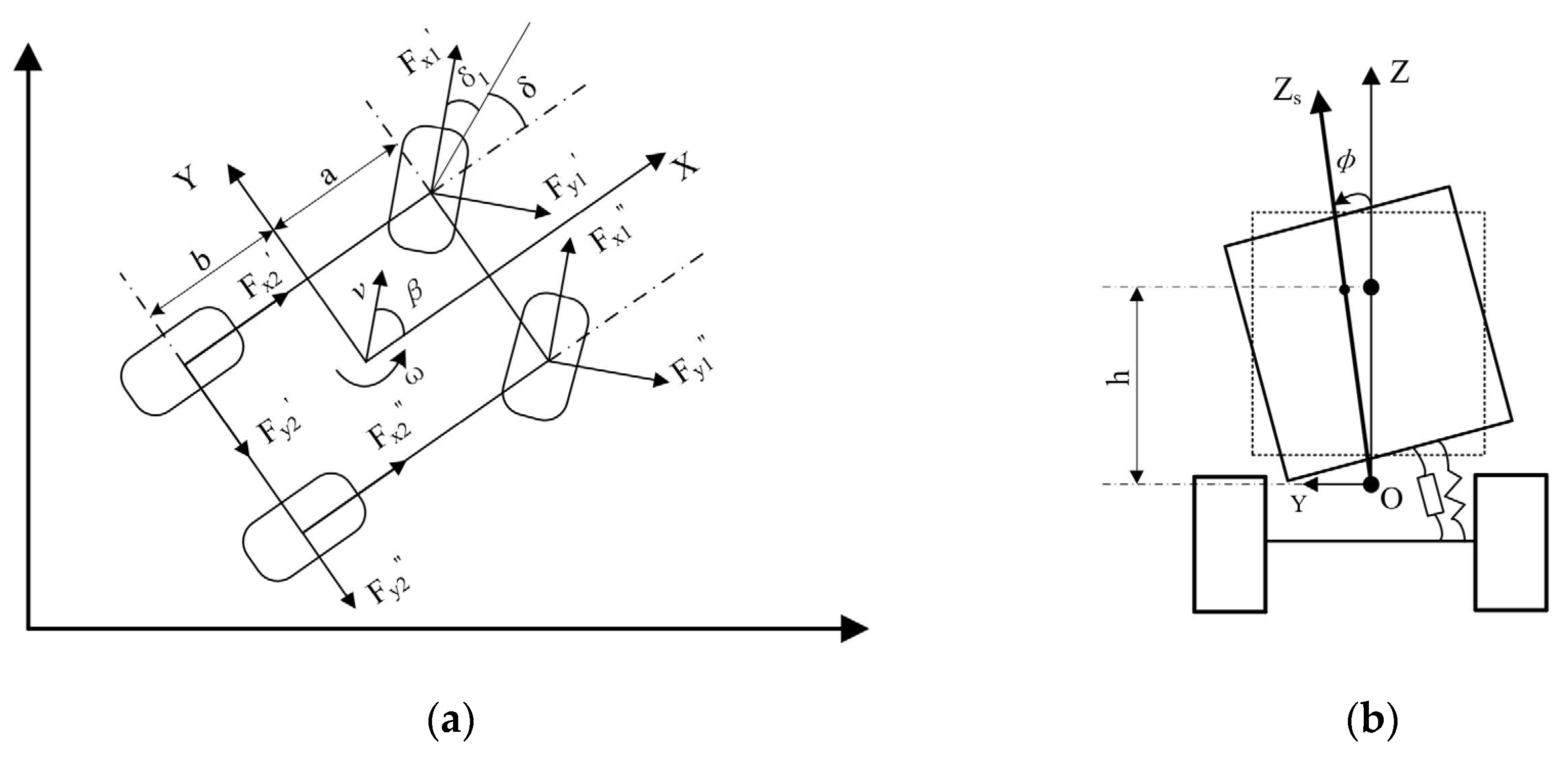
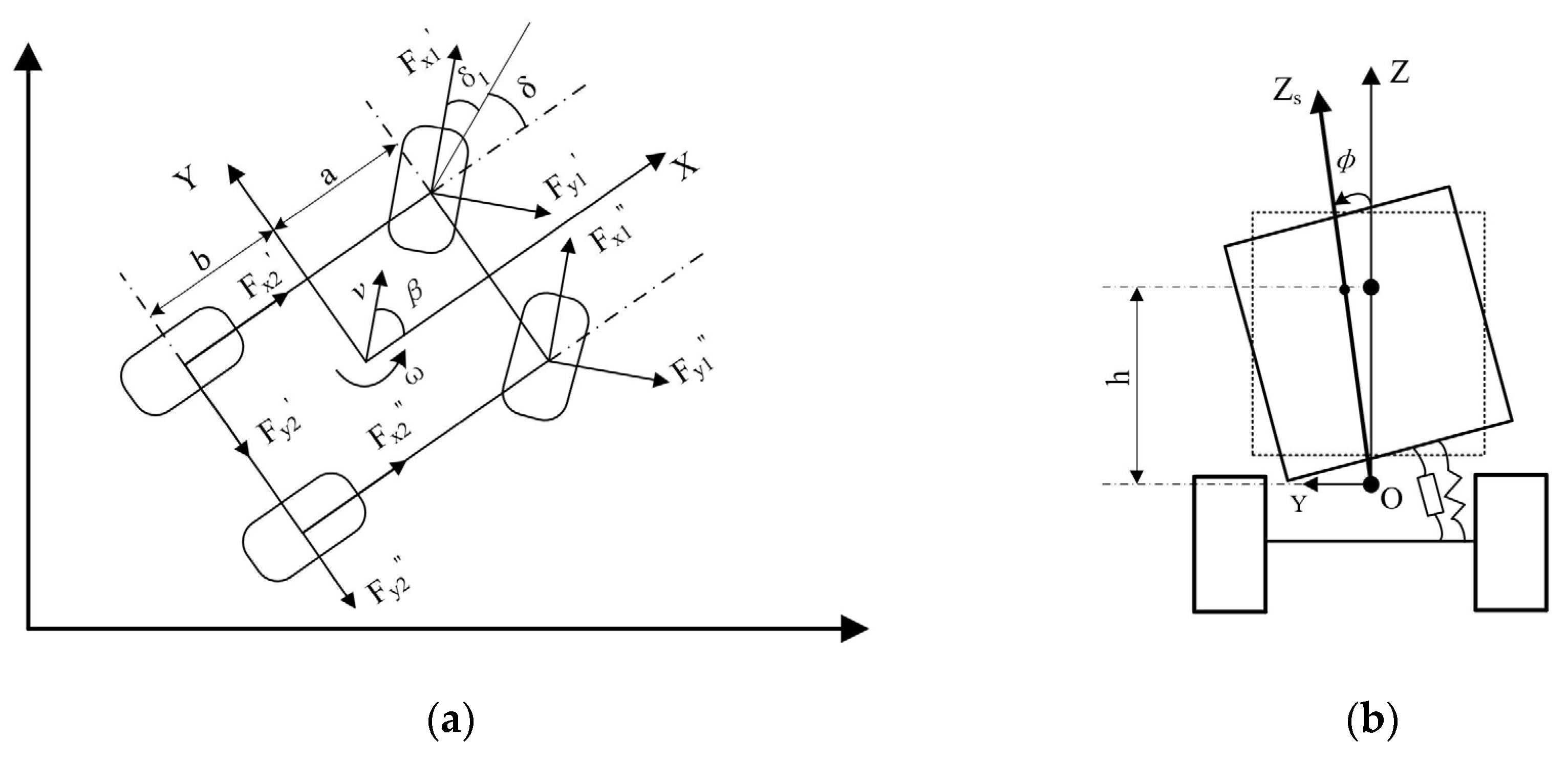
2.1. Vehicle Rollover Dynamics Model
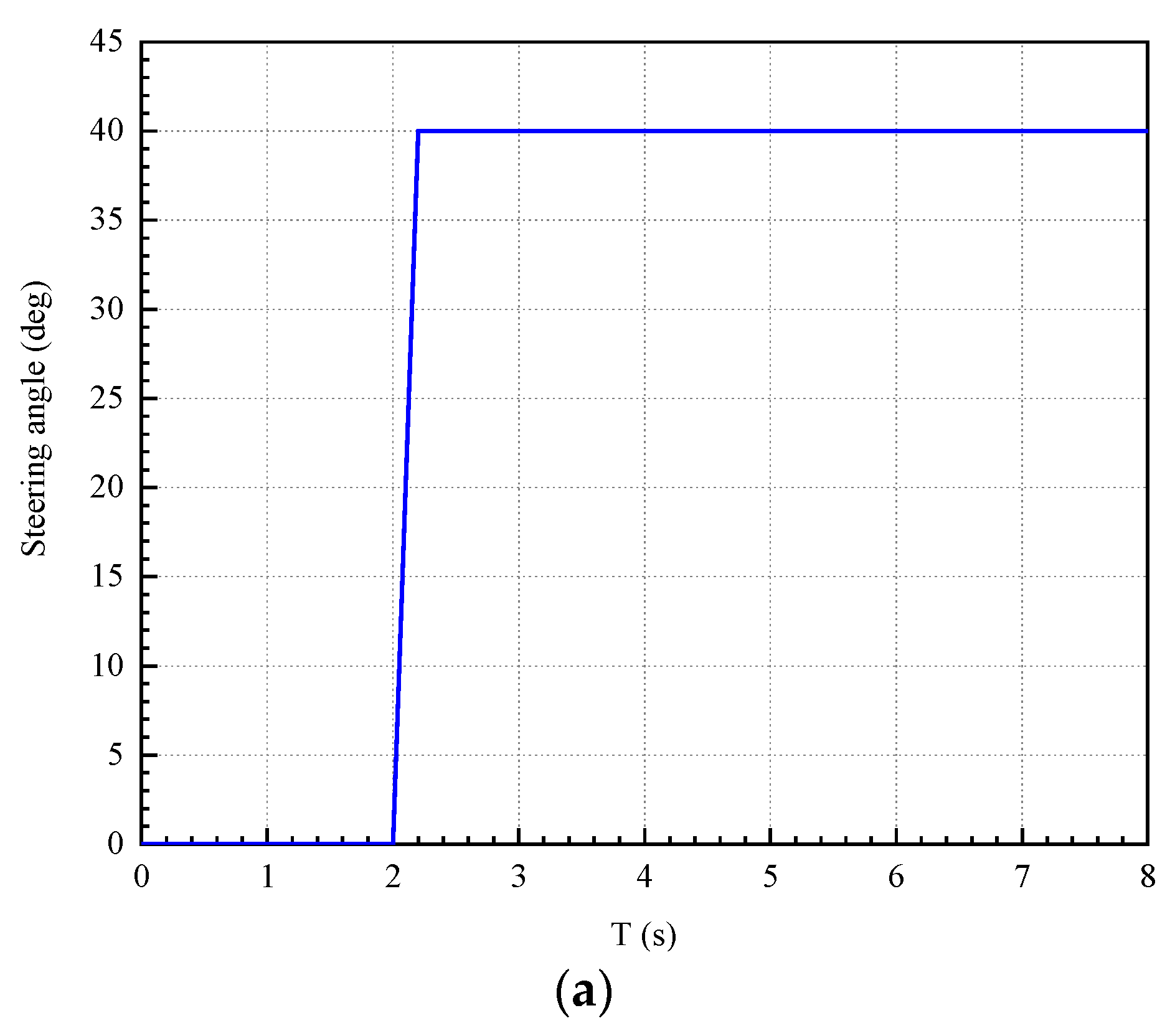
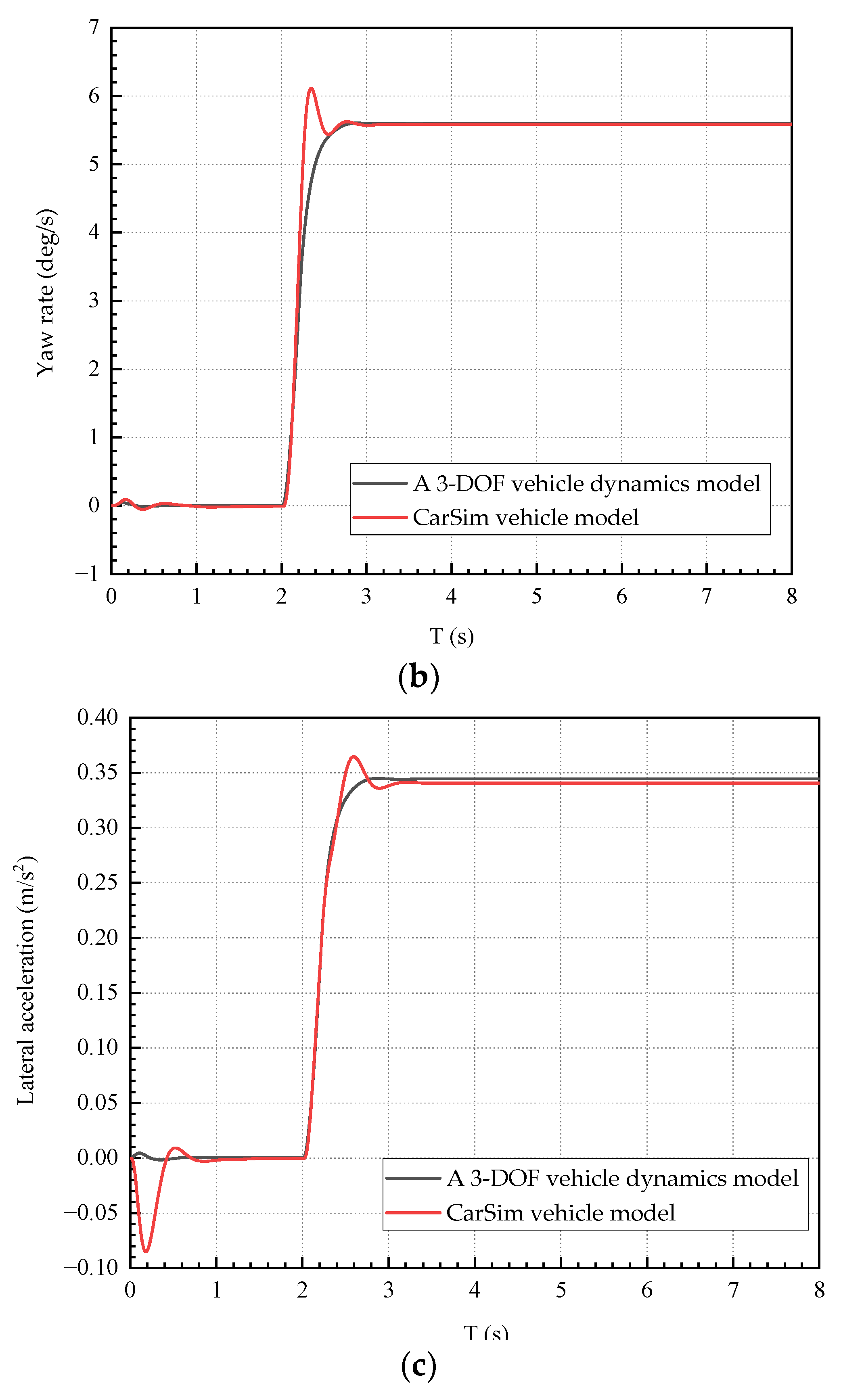
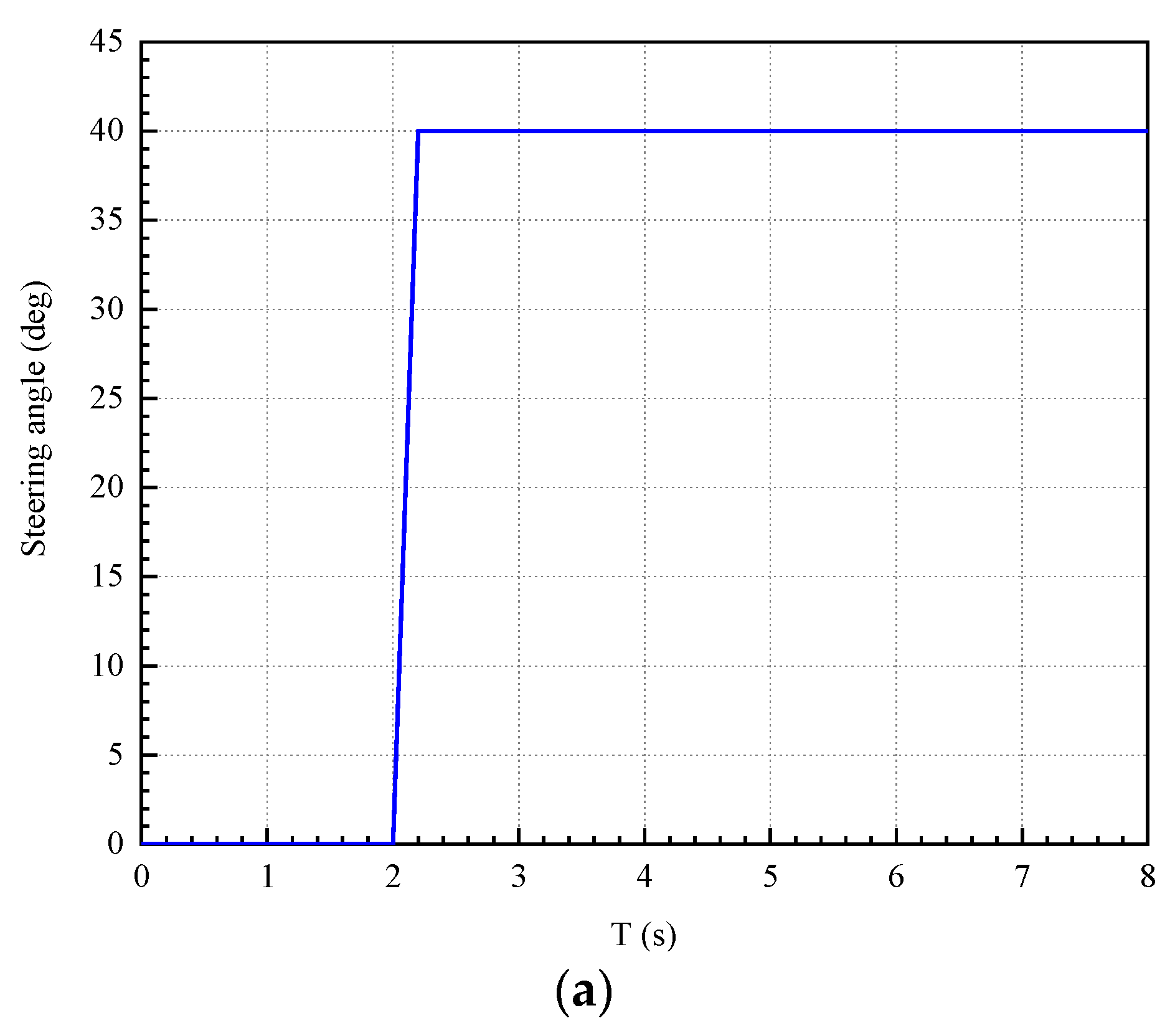
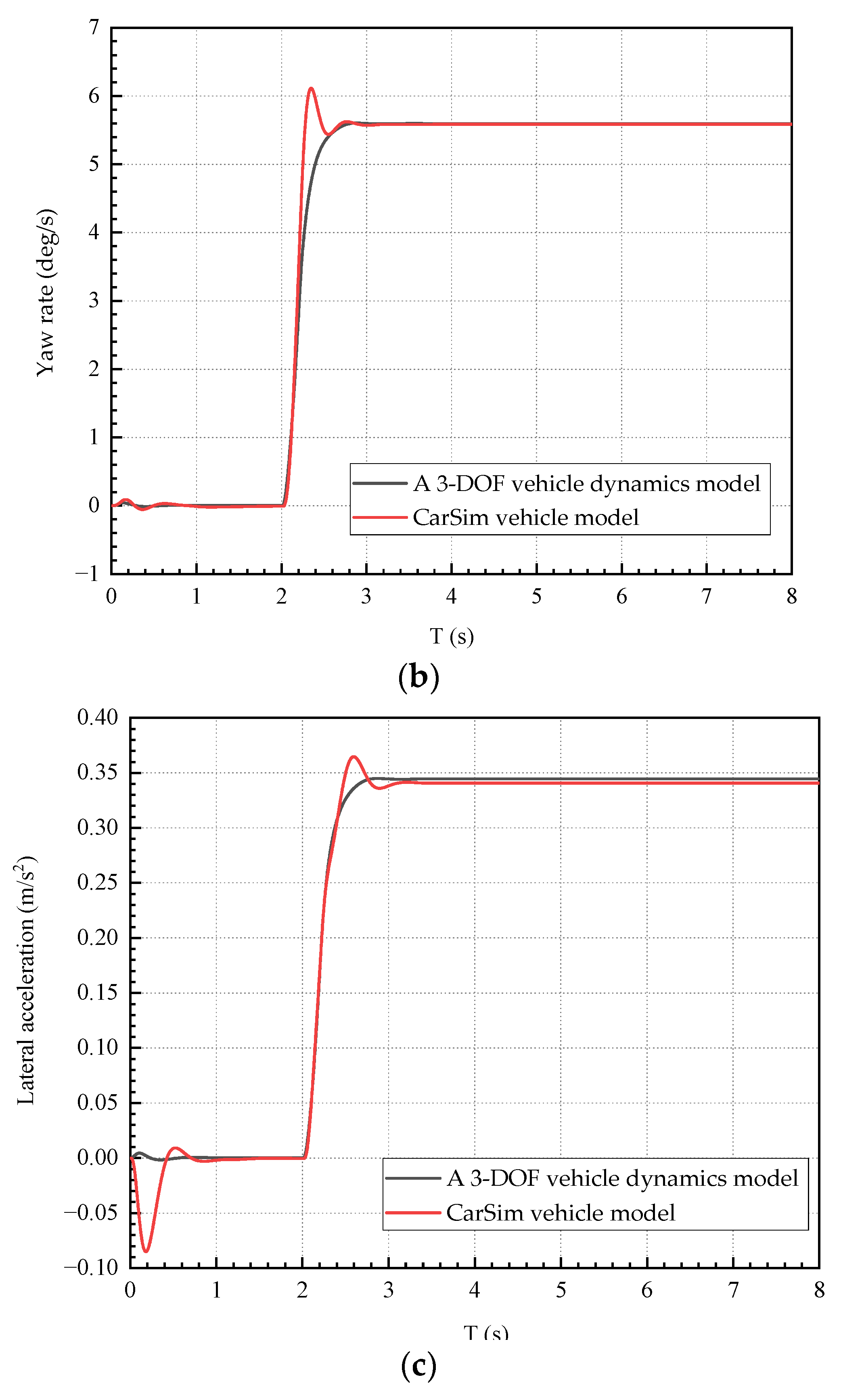
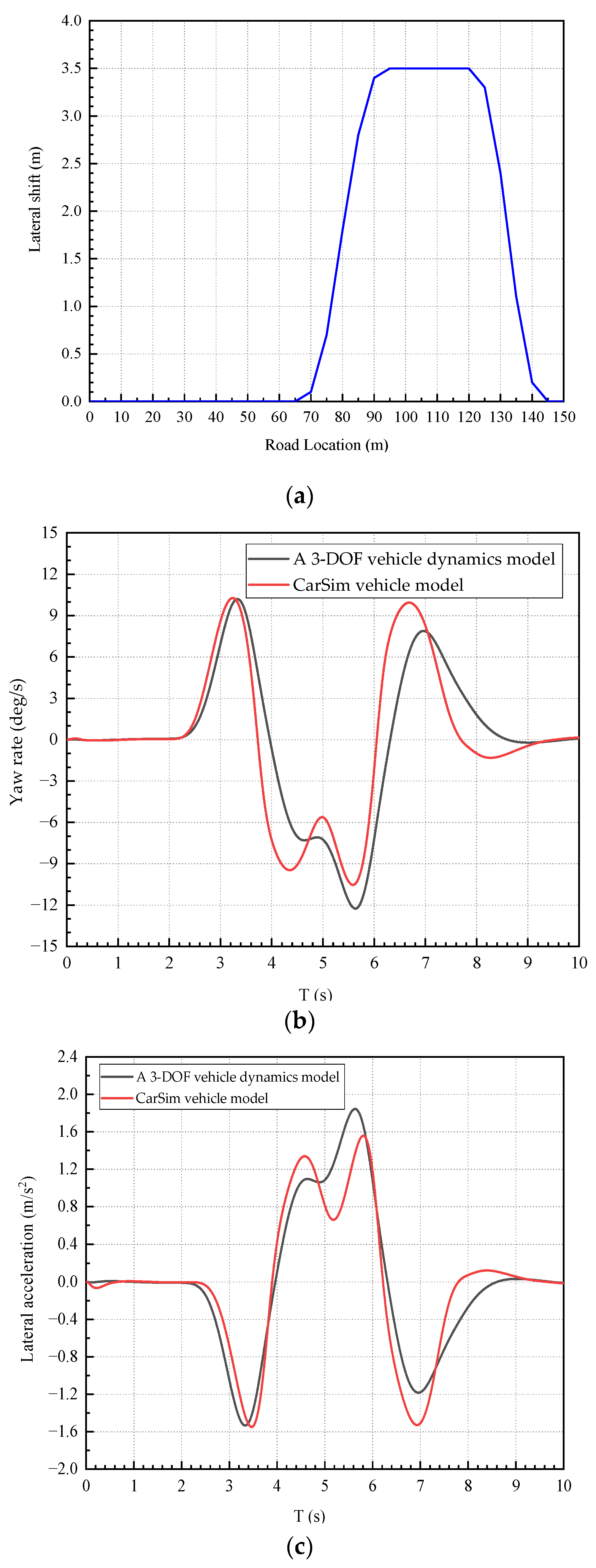
2.2. Validation of the Vehicle Dynamics Model
2.3. Rollover Stability Evaluation Index
3. Selection of the Control Strategy
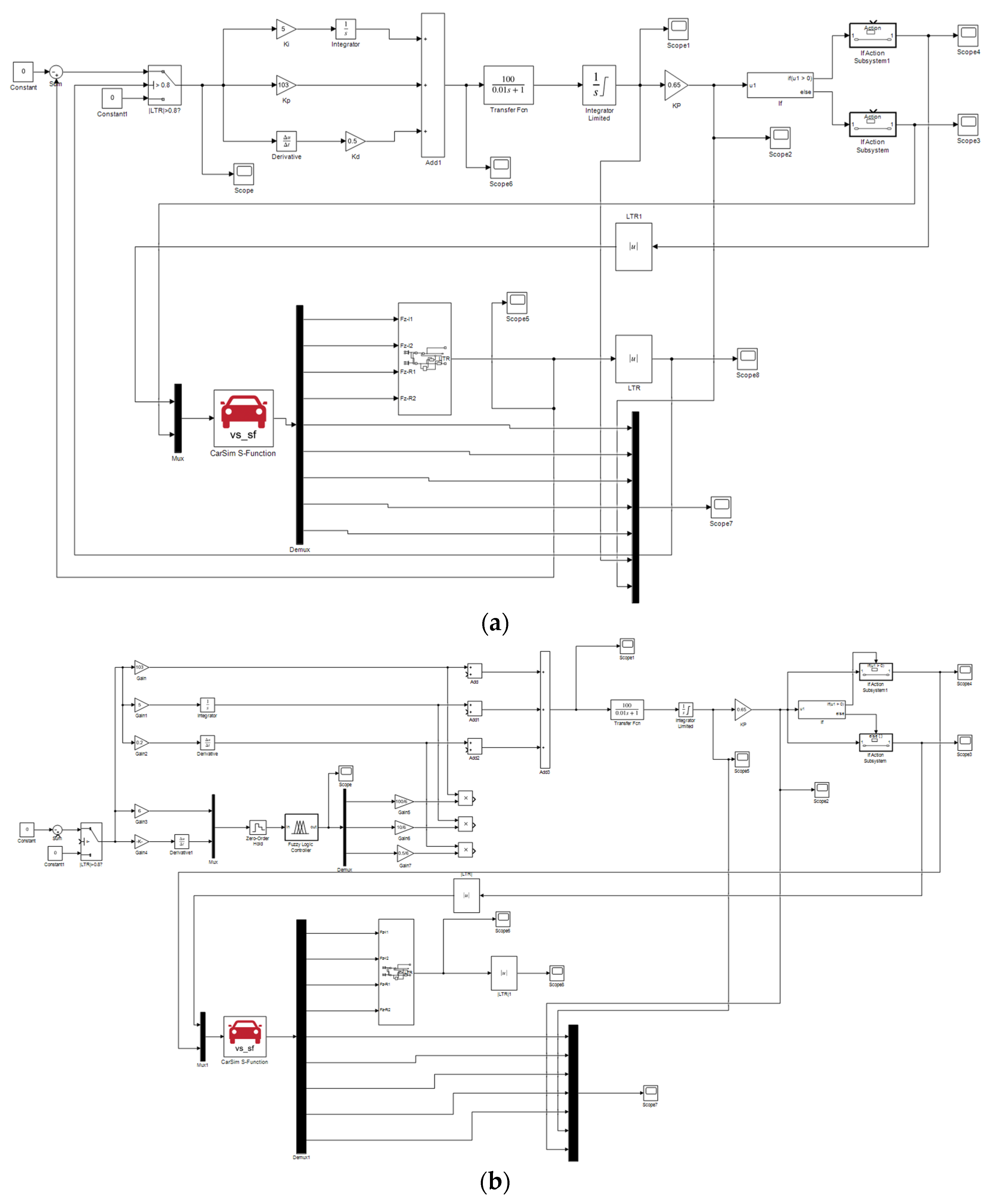
3.1. Upper-Level Control Strategy
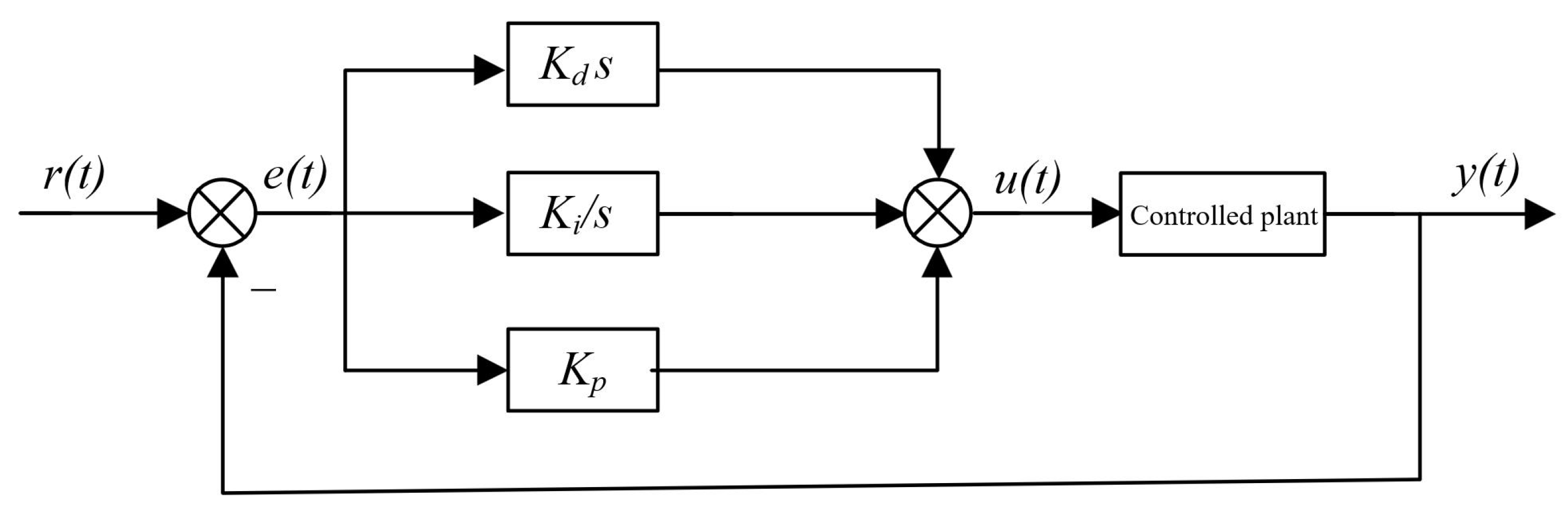
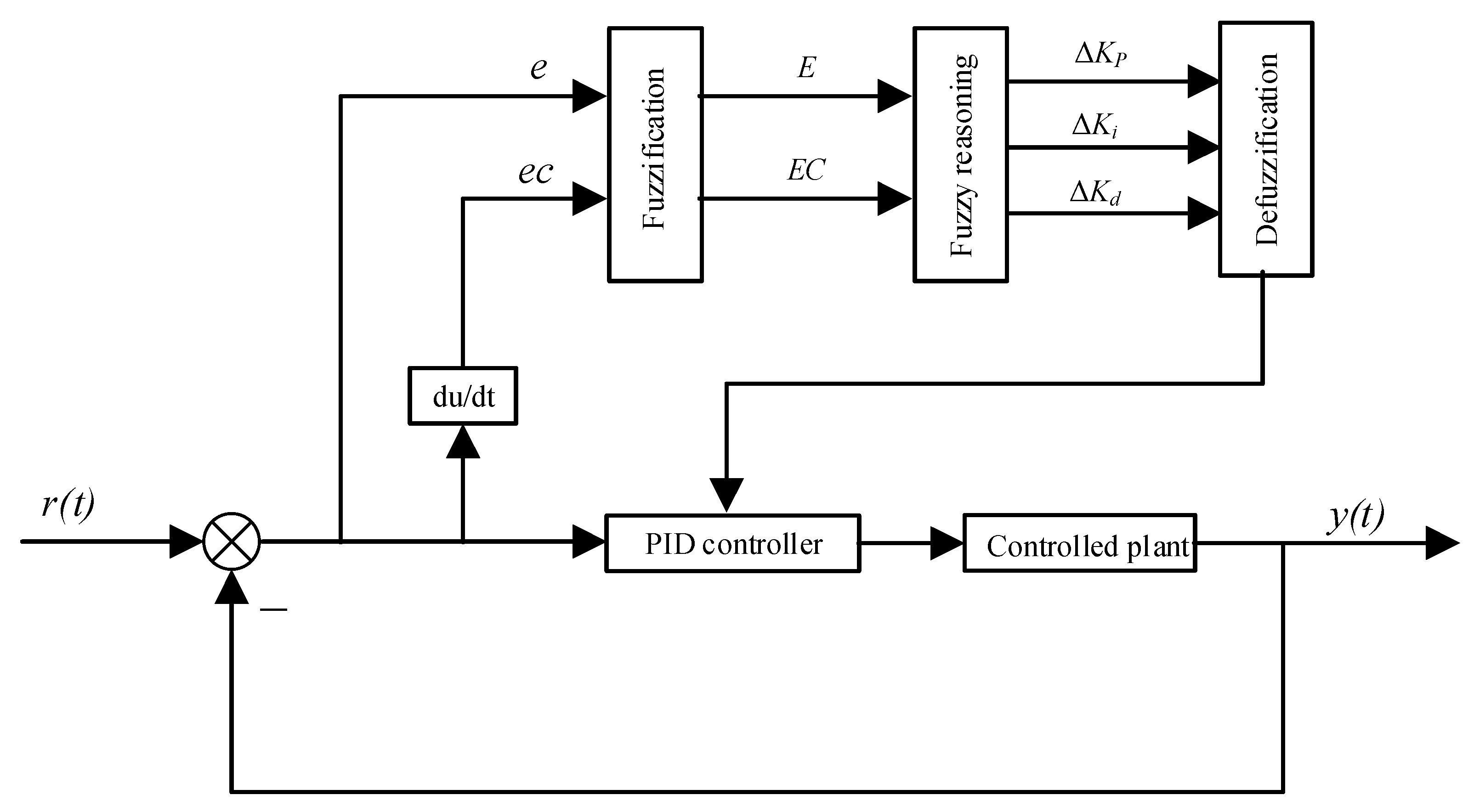
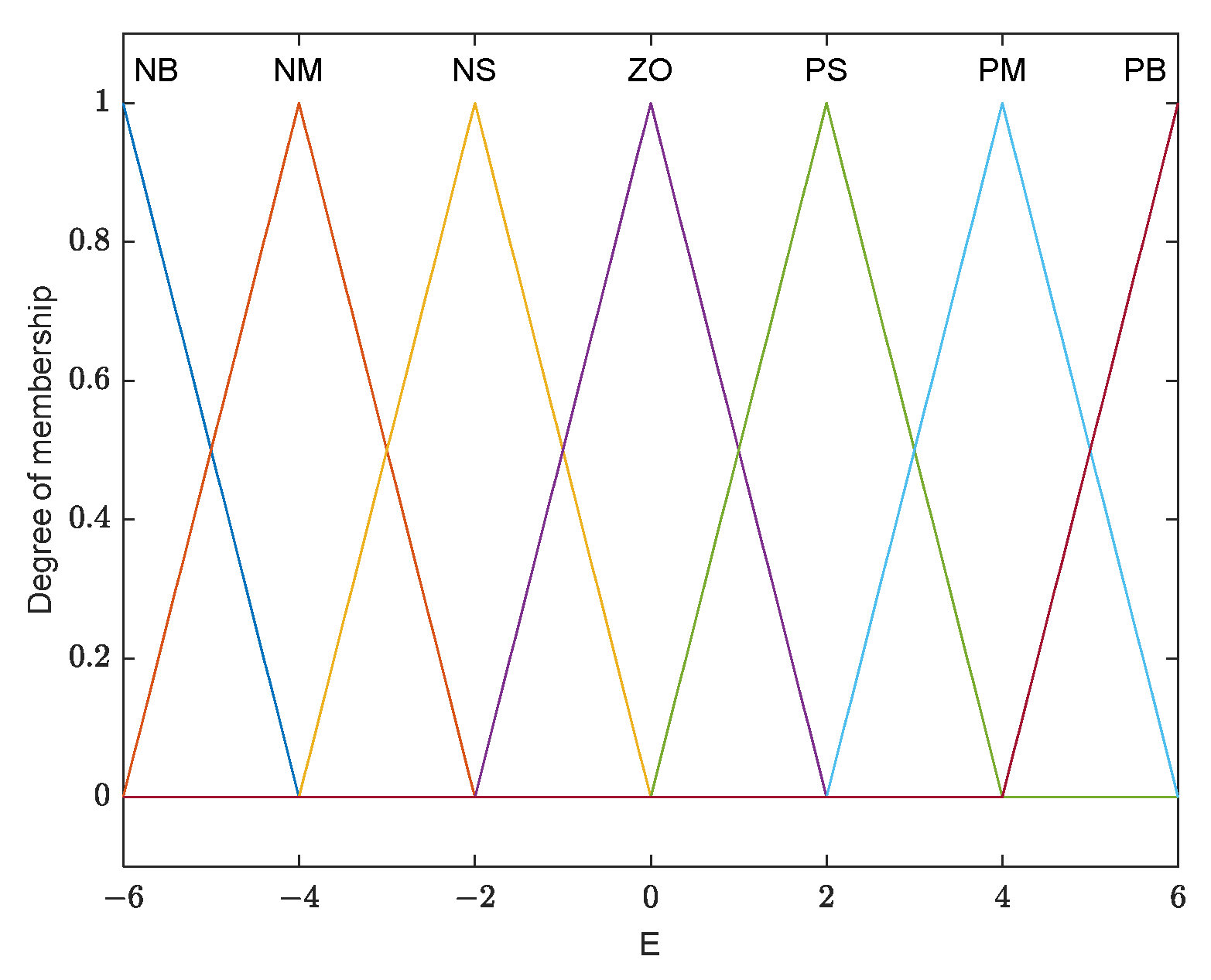
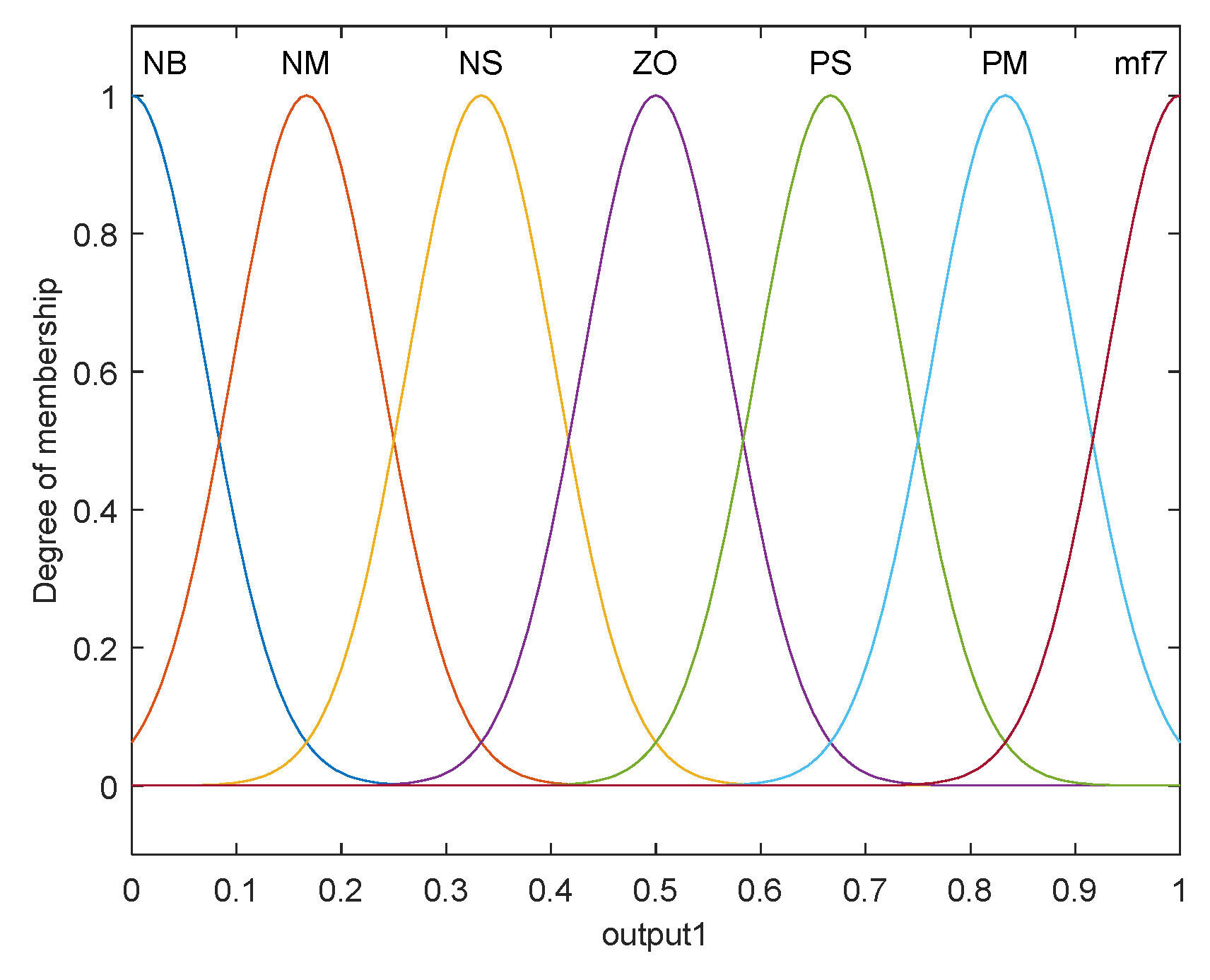
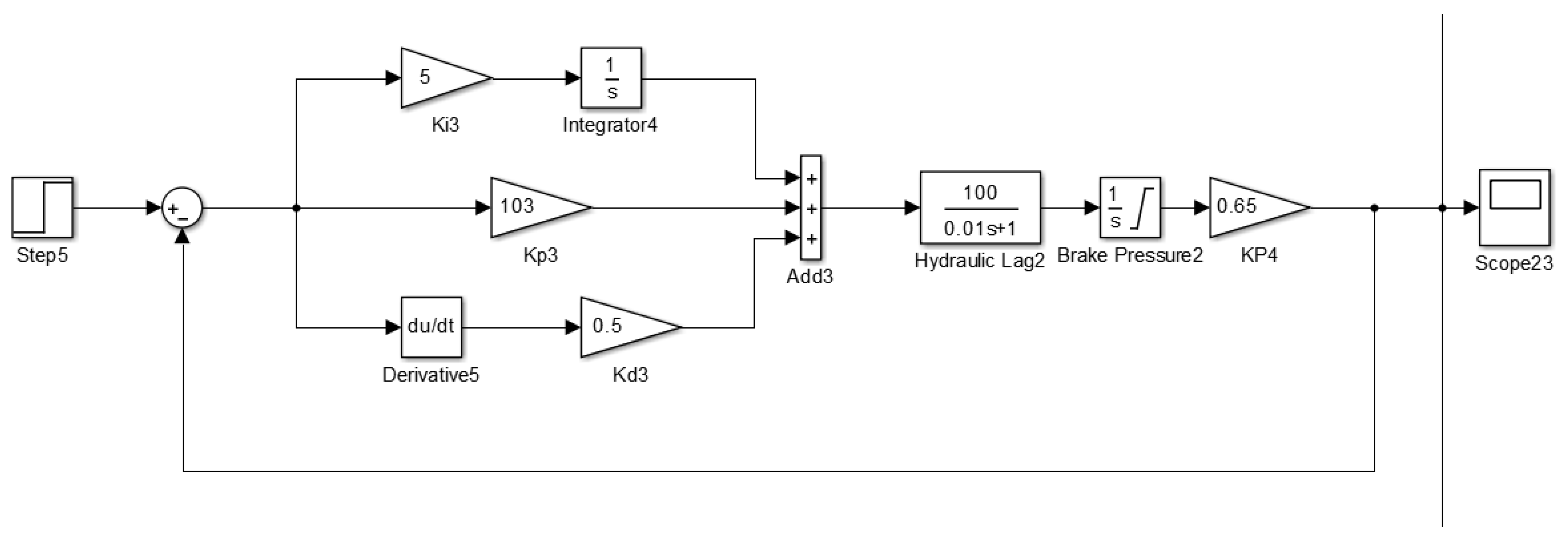
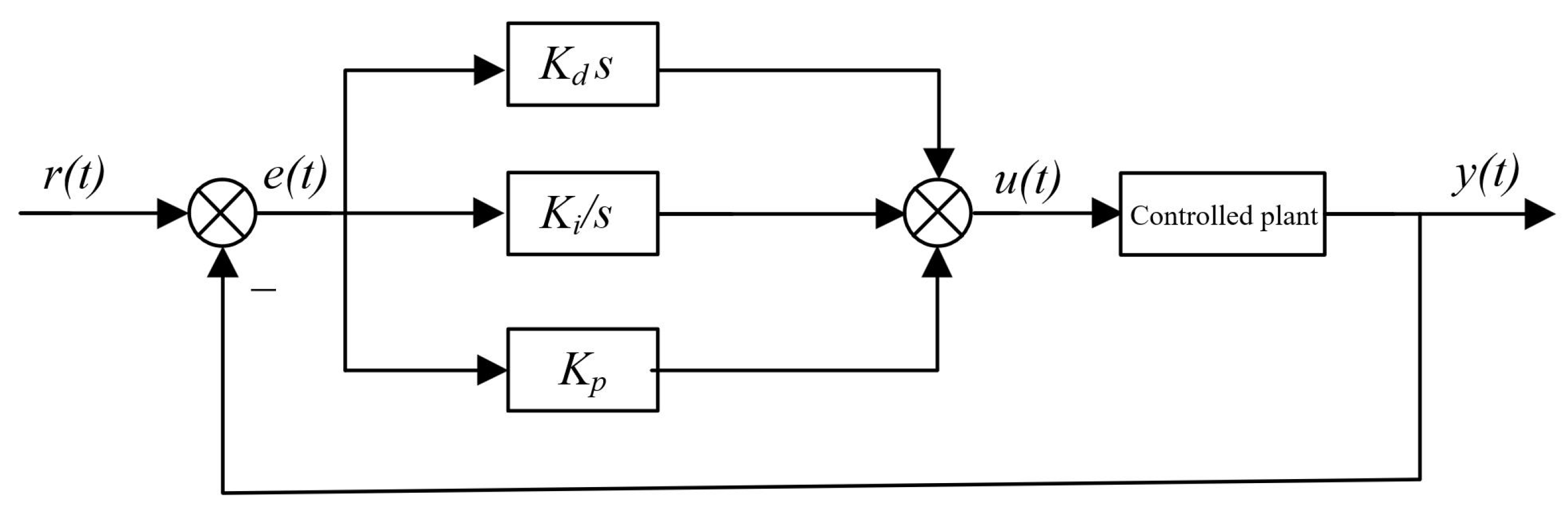
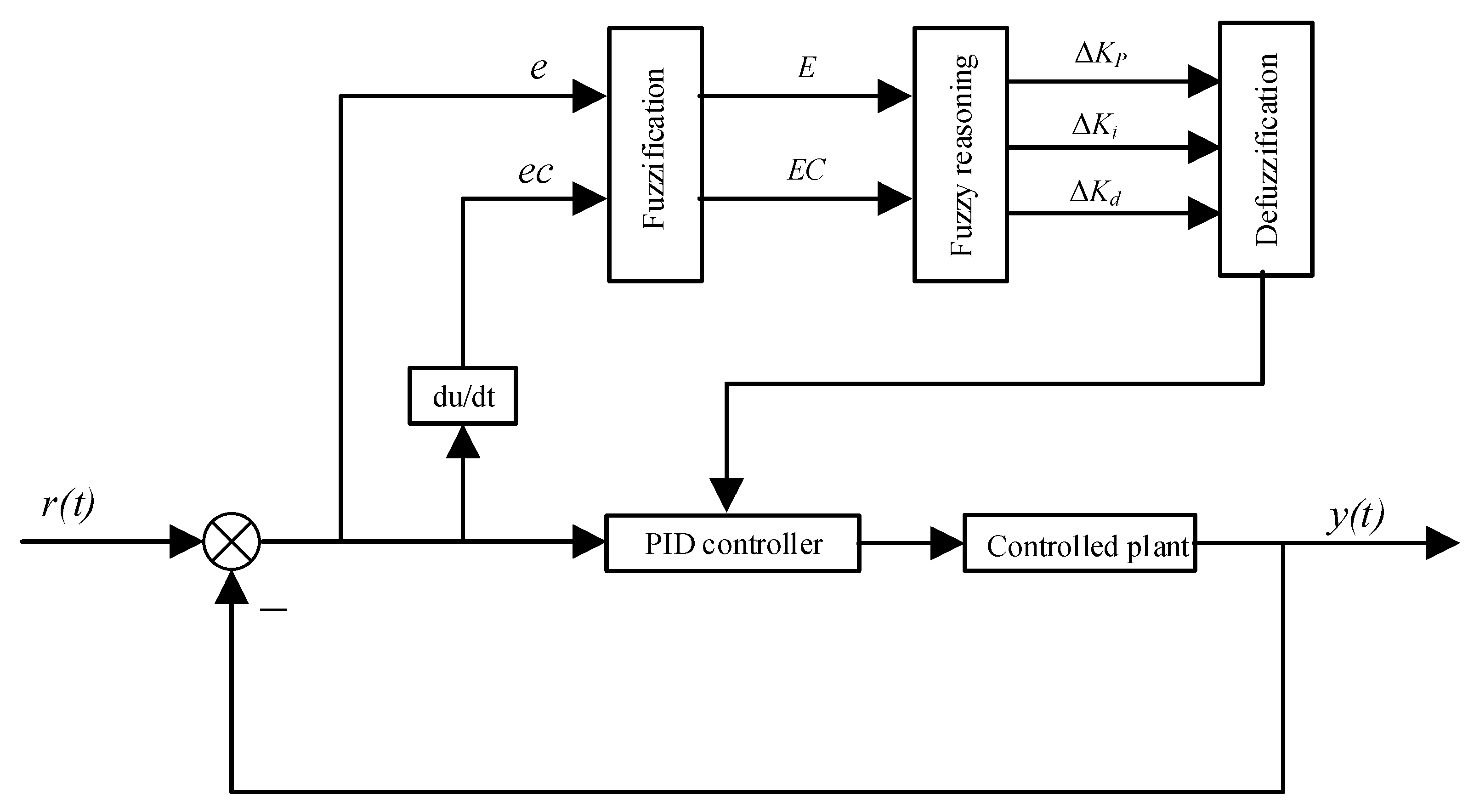
3.1.1. Selection of the Control Algorithm
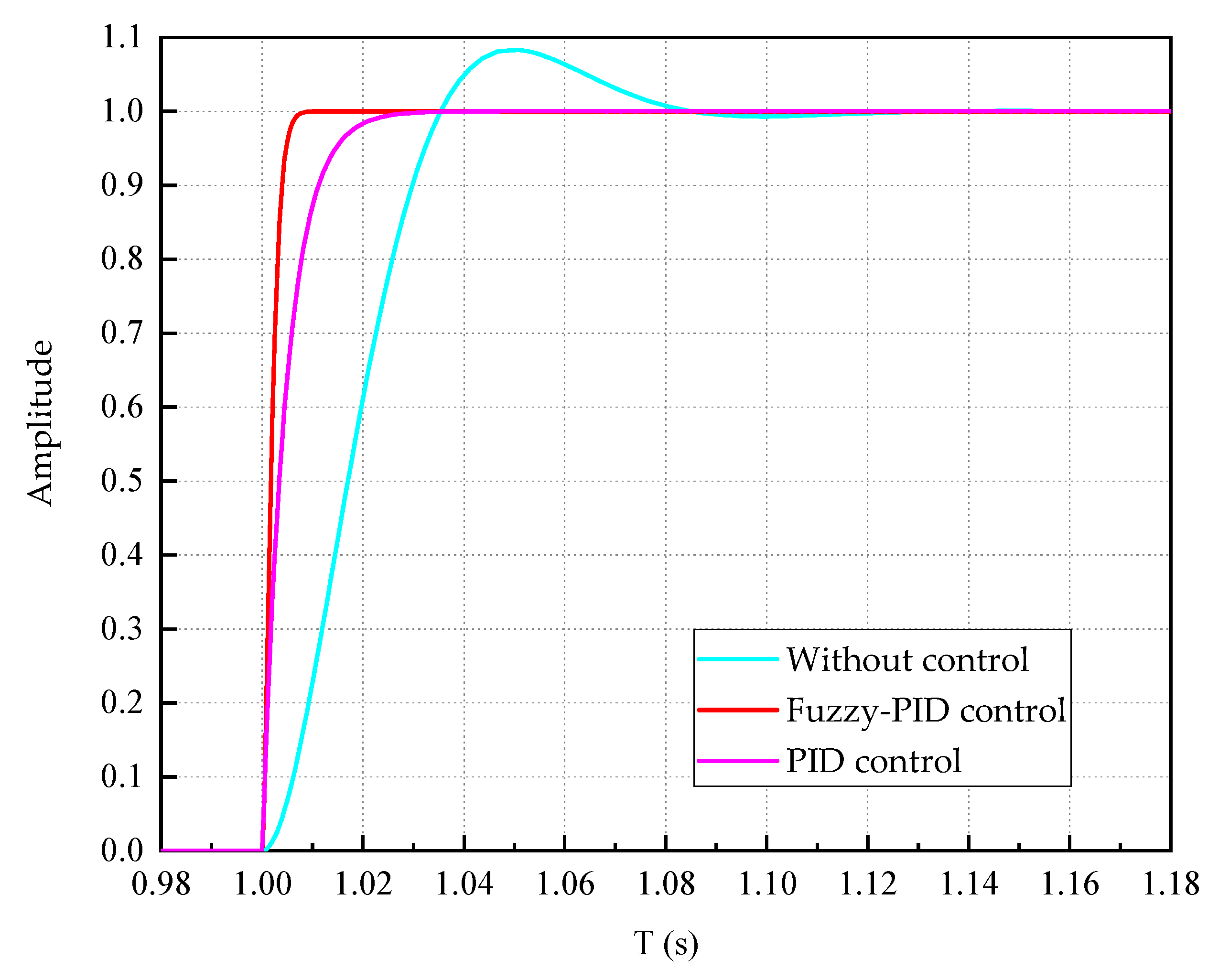
3.1.2. Controller Results Analysis
3.2. Lower Actuators
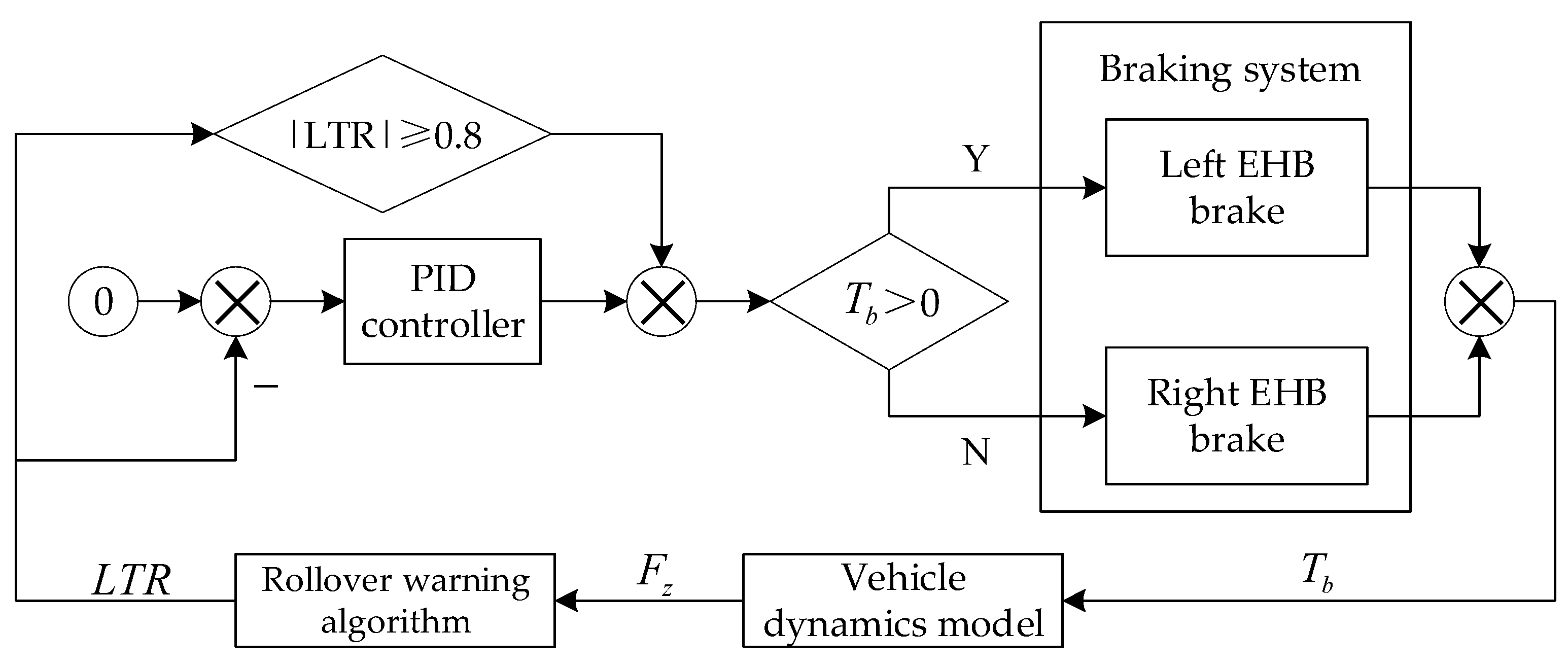
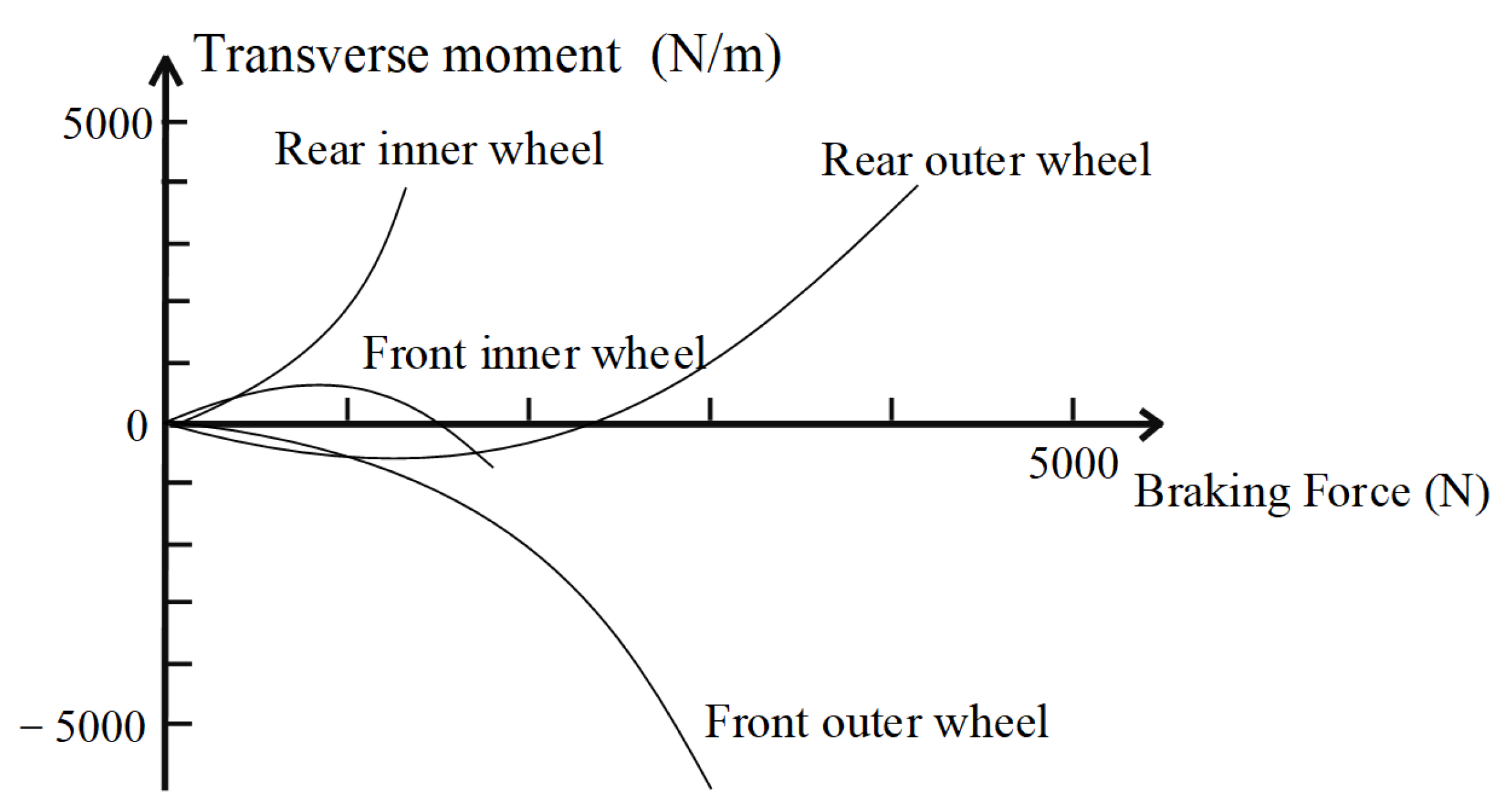
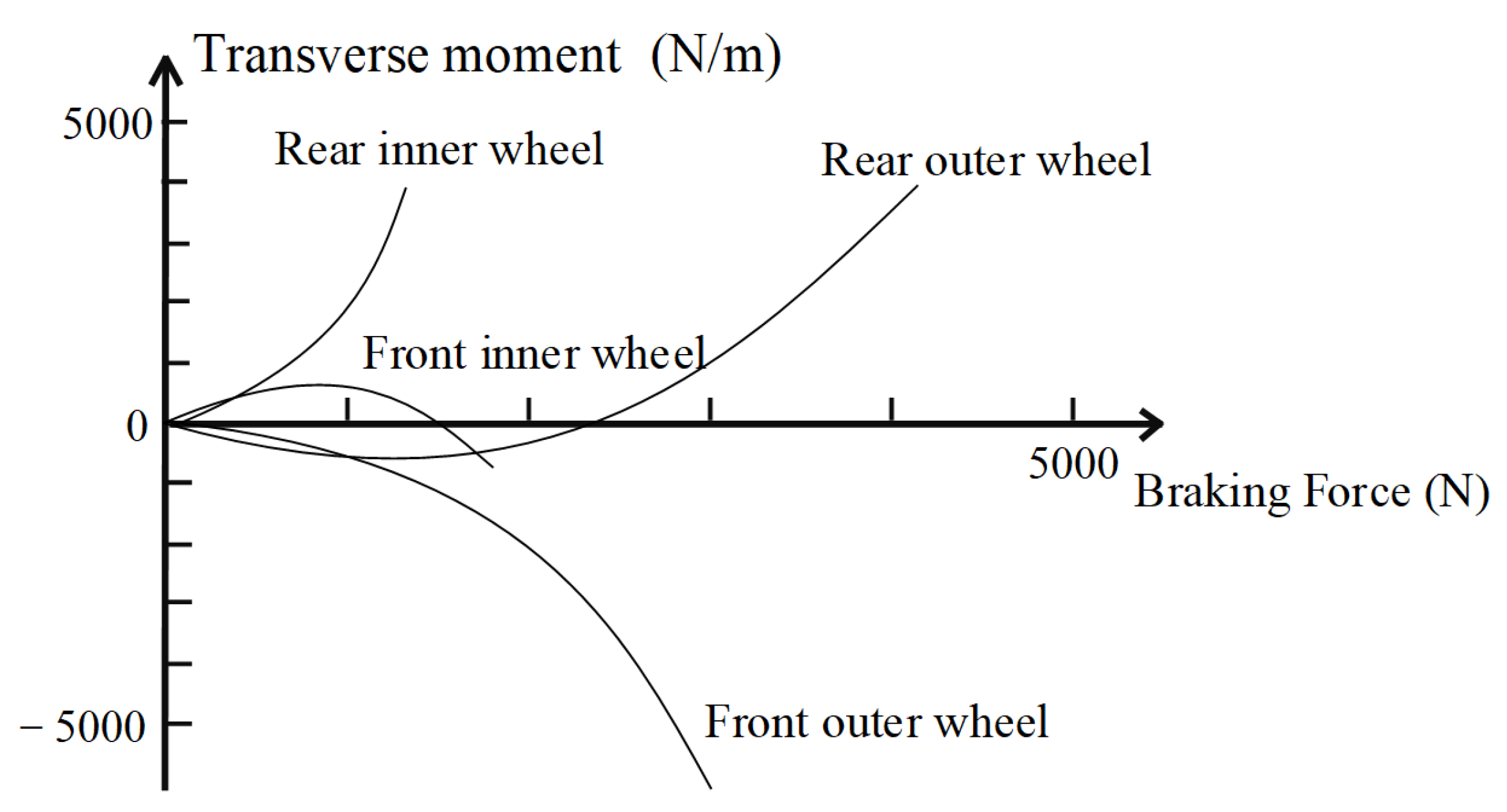
3.2.1. Judgment Logic for the Braking Target Wheel Cylinder
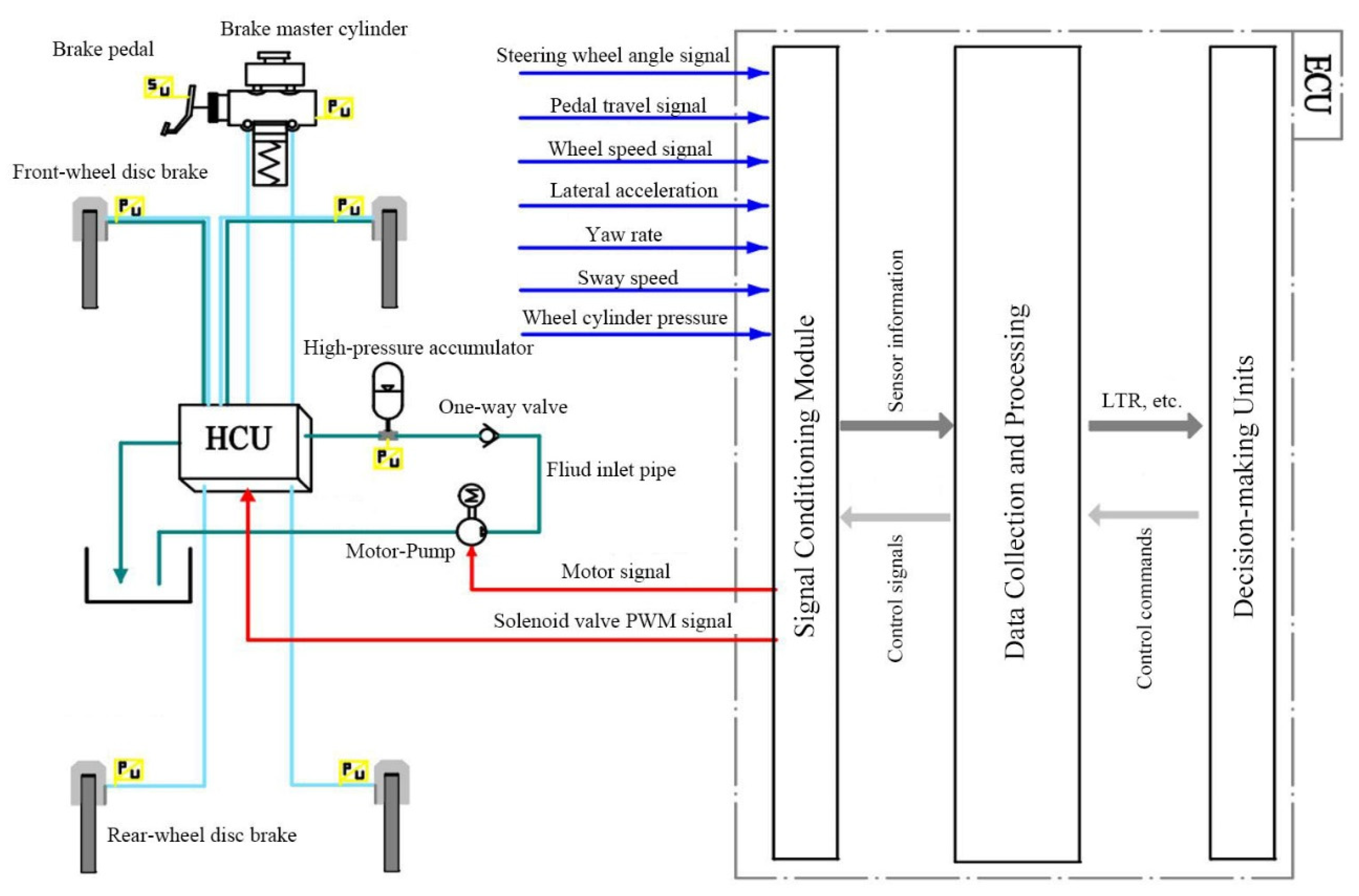
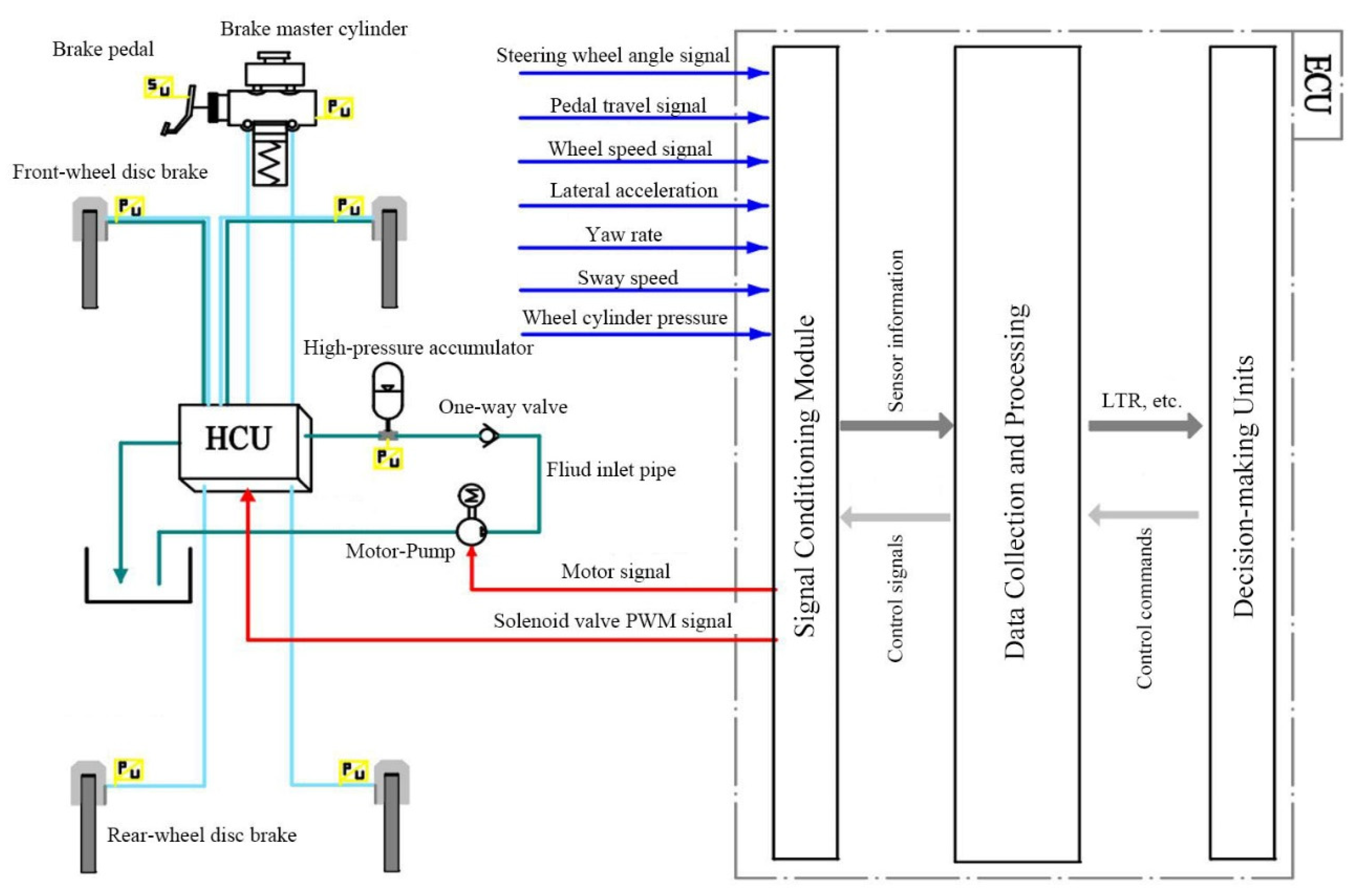
3.2.2. Overall Design of the Wire-Controlled Auxiliary Braking System
4. Co-Simulation Analysis and Result Verification
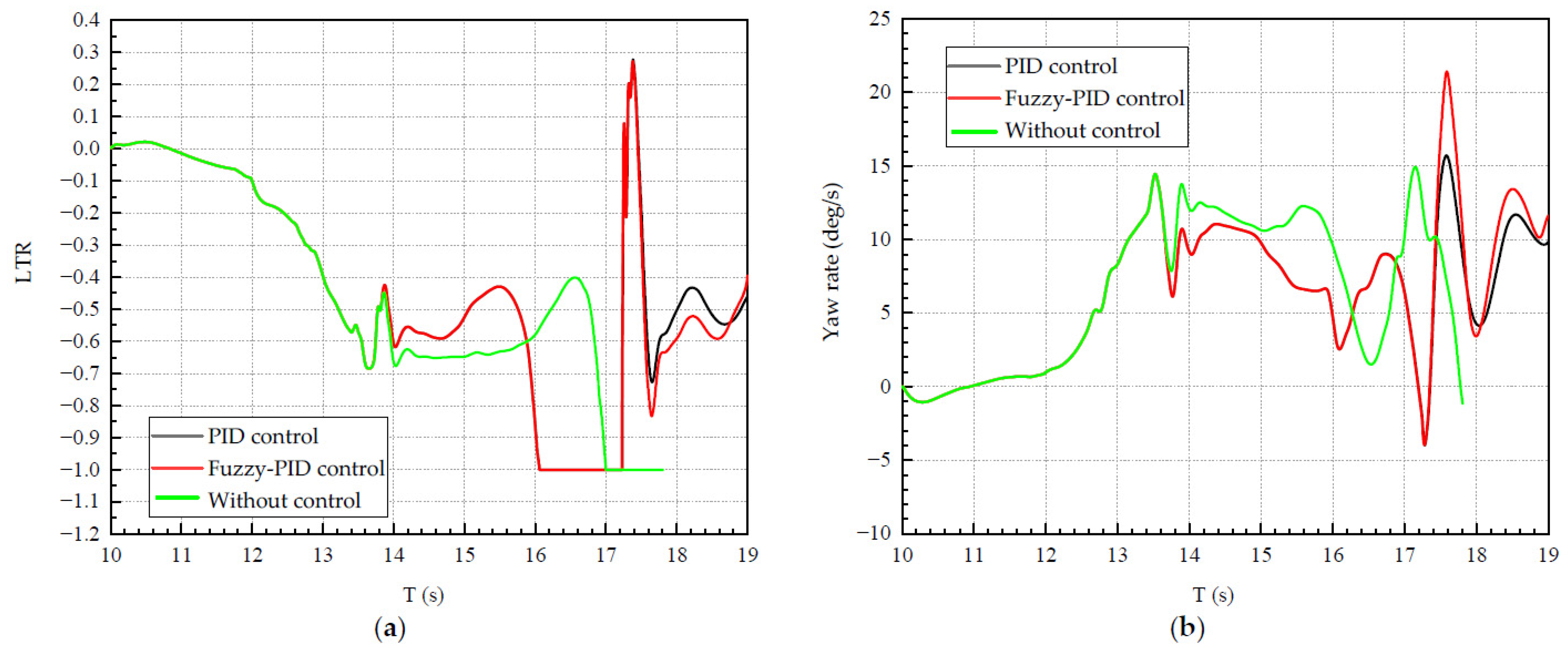
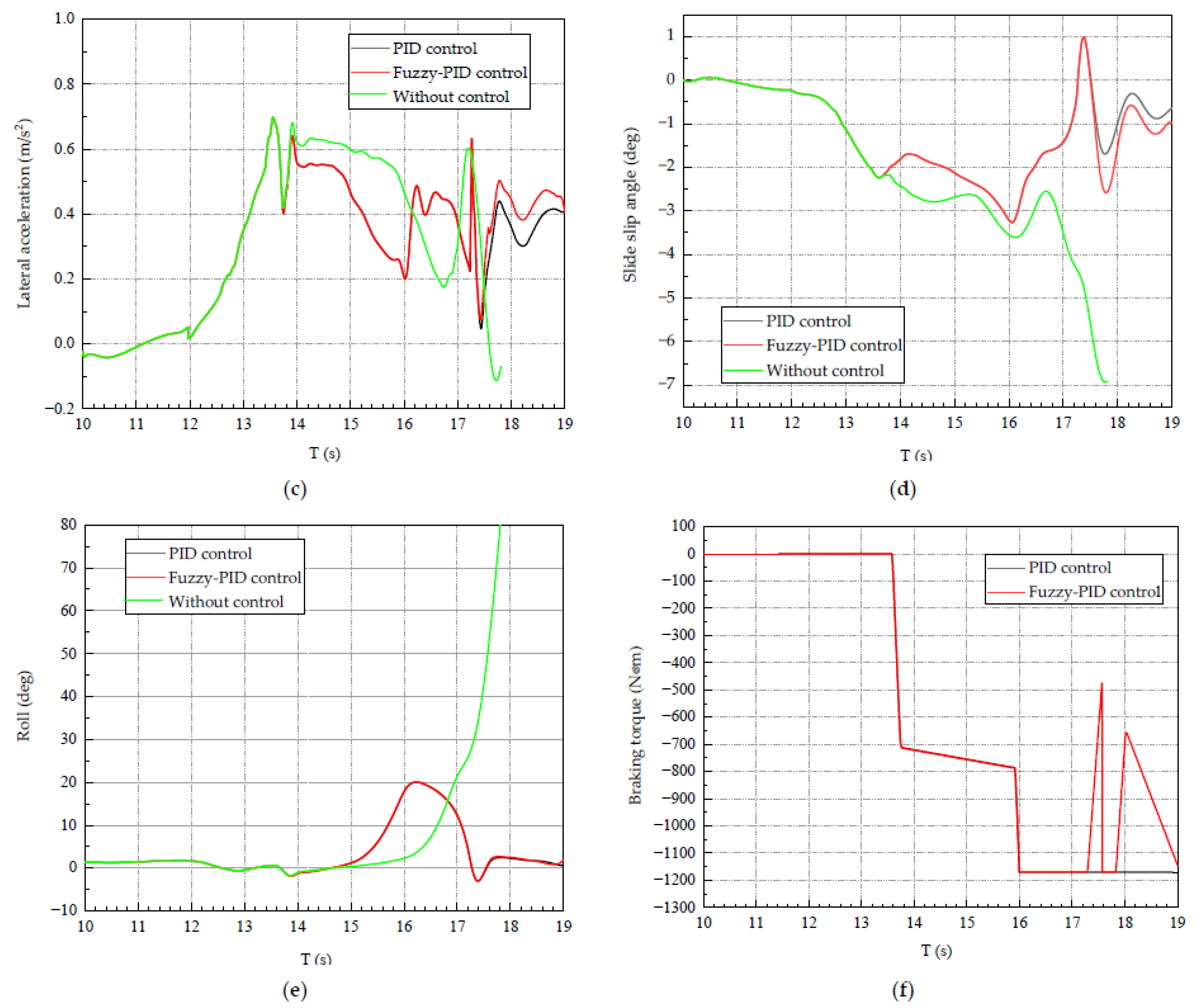
4.1. Fish Hook Steering Test
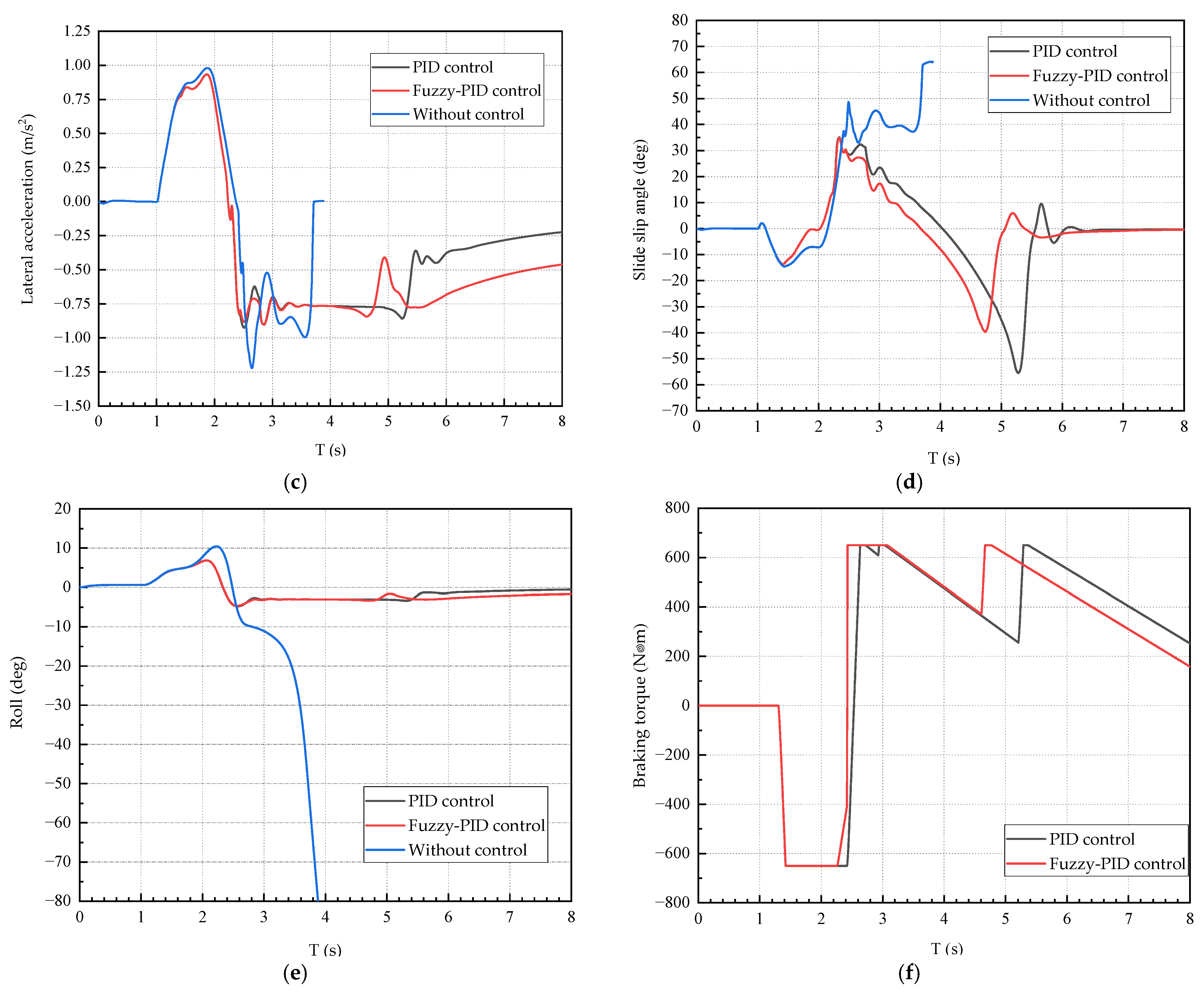
4.2. J-Turn Test
5. Conclusions
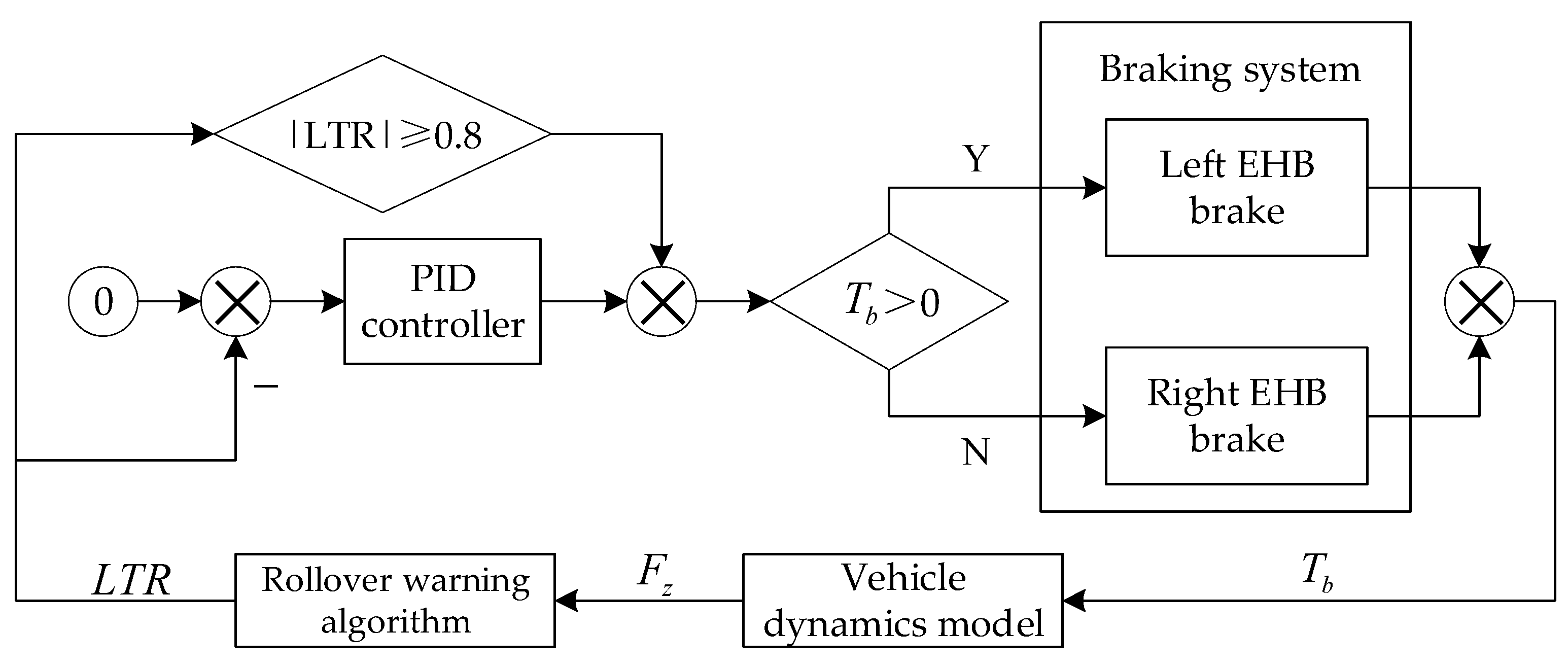
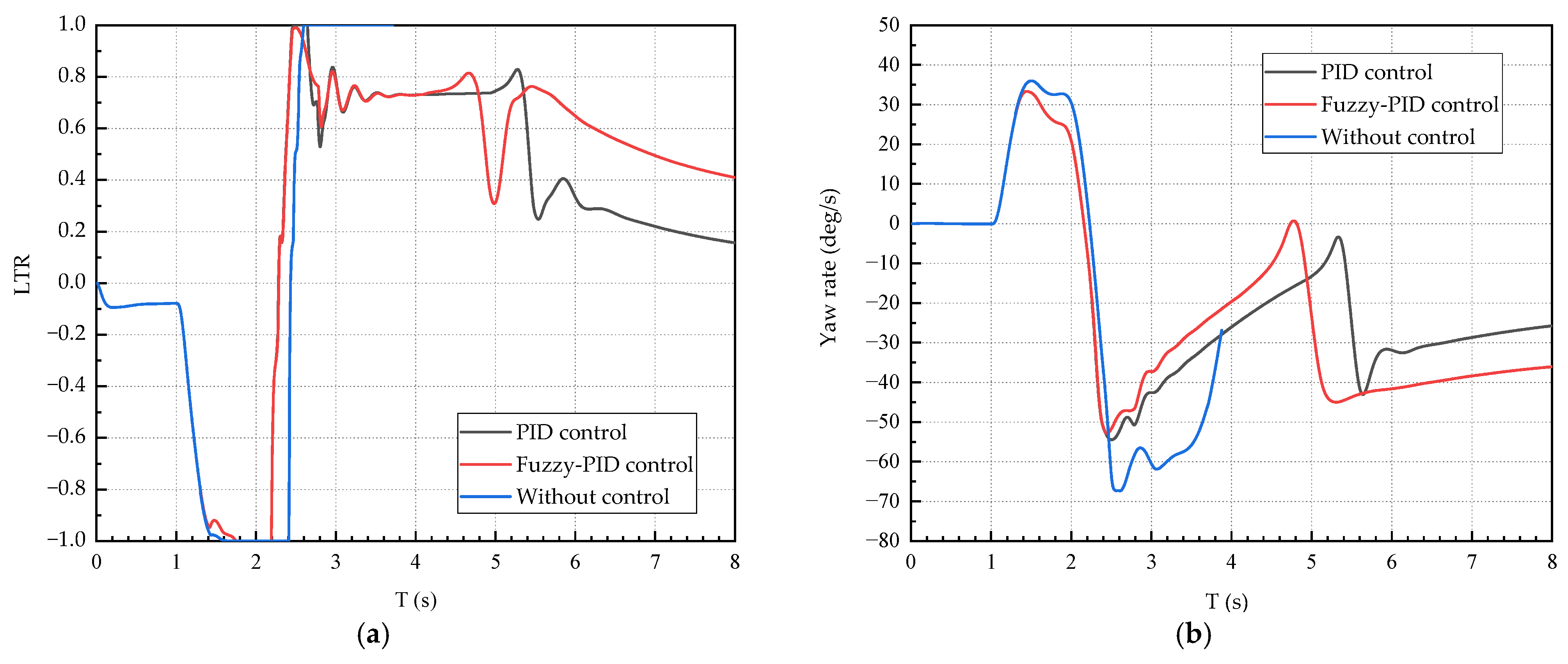
- In this paper, an anti-rollover wire-controlled auxiliary braking system was designed for the rollover problem of forest fire trucks. The proposed three-degrees-of-freedom dynamics model of the forest fire truck was first built in MATLAB/Simulink, and the dynamics model was simulated and verified in CarSim under the steering wheel angle step input condition and double-shift line condition. The auxiliary braking control system consisted of a vehicle rollover warning module and a wire-controlled auxiliary braking system. The vehicle rollover warning module was intended to use the real-time roll angle and its angular velocity obtained by the inertial guidance system as input variables, and the lateral load transfer rate (LTR) as the rollover evaluation index and determine whether the current body attitude is in the rollover critical state according to the algorithm. The wire-controlled auxiliary braking system adopted the electro-hydraulic wire-controlled actuation system (EHB) to achieve vehicle speed reduction by differential braking technology in the rollover critical state. The braking system consisted of a DC reducer motor, plunger pump, accumulator, solenoid valve, hydraulic brake line, brake sub-pump caliper assembly, brake pressure sensor, electronic control unit and so on. When the wire-controlled auxiliary braking system worked, it first obtained the current body attitude parameters, calculated the required target brake wheel cylinder pressure through PID/Fuzzy-PID control, and then applied differential braking to the front left/right wheels of the vehicle to provide intervention transverse moment and reduce the rollover tendency of the vehicle. To verify the effectiveness of the designed braking system, two extreme operating conditions were selected to analyze the control effects of PID control and fuzzy-PID. For both, the maximum lateral acceleration improved by at least 42.8% and the maximum slide slip angle improved by 32%, while for the maximum roll, the fuzzy PID was able to advance the control to reduce the maximum roll by 20%, while the PID control was only able to control within 5%. The results showed that both PID and fuzzy-PID control algorithms can reliably calculate the target brake wheel cylinder pressure. The latter control effect is better than the former, PID control is at least 2 s delayed than fuzzy PID with faster response, shorter adjustment time and smaller overshoot;
- In order to design a more perfect braking system in future work, and to verify the execution capability of the hardware of the EHB system, it is also necessary for it to perform hydraulic simulation to verify whether it can realize the process of rapid increase and slow decompression, as well as to design the appropriate brakes and other related components according to the selected vehicle.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Parameter Notation | Parameter Definition | Unit |
| m | The overall vehicle mass | kg |
| ms | The spring mass | kg |
| β | The lateral deflection angle | rad |
| ωr | The angular velocity of the transverse sway | rad/s |
| h | The difference between the heights of the center of mass on the spring and the center of lateral camber of the vehicle | m |
| Fy1 | The lateral forces of the front wheel | N |
| Fy2 | The lateral forces of the rear wheel | N |
| kf | The lateral deflection stiffness of the front wheel | N/rad |
| kr | The lateral deflection stiffness of the rear wheel | N/rad |
| δ | The nominal front-wheel deflection angle | rad |
| δ1 | The effective side deflection angle of the front wheels | rad |
| δ2 | The effective side deflection angle of the rear wheels | rad |
| Ix | The rotational inertia of the mass on the spring about the x-axis | kg·m2 |
| Iz | The rotational inertia of the z-axis of the vehicle | kg·m2 |
| Ixz | The inertia product of the mass on the spring around the x and z axes | kg·m2 |
| a | The distances from the center of gravity of the vehicle to the front axle | m |
| b | The distances from the center of gravity of the vehicle to the rear axle | m |
| v | the vehicle speed | m/s |
| Df | The front suspension lateral camber damping | N·m·s/rad |
| Dr | The rear suspension lateral camber damping | N·m·s/rad |
| φ | The body roll angle | rad |
| Cφ1 | The front lateral camber rigidity | N·m/rad |
| Cφ2 | The rear lateral camber rigidity | N·m/rad |
| L | The length of wheelbase | m |
| N1 | The positive torque coefficient for the front wheel return | N·m/rad |
| N2 | the positive torque coefficient for the rear wheel return | N·m/rad |
| Ef | The front wheel lateral steering coefficient. | |
| Er | The rear wheel lateral steering coefficients. | |
| d | Wheelbase | m |
| lf | The distance from center of mass to front axle | m |
| lr | The distance from center of mass to rear axle | m |
| ks | Suspension Sway Stiffness | N/rad |
| g | Gravitational acceleration | m/s2 |
| ay | The lateral acceleration at the center of mass | m/s2 |
| T | Wheelbase of the vehicle | m |
References
- Rezapour, M.; Ksaibati, K. Contributory factors to the severity of single-vehicle rollover crashes on a mountainous area, generalized additive model. Int. J. Inj. Contr. Saf. Promot. 2022, 29, 281–288. [Google Scholar] [CrossRef] [PubMed]
- Lu, Y.; Weichao, Z.; Guodong, Y.; Jinhao, L.; Yanjun, R.; Jiwei, F. Active anti-rollover model predictive control for heavy vehicles considering variable curvature curves. J. Southeast. Univ. Nat. Sci. Ed. 2022, 52, 990–997. [Google Scholar]
- Nguyen, T.A. Preventing the rollover phenomenon of the vehicle by using the hydraulic stabilizer bar controlled by a two-input fuzzy controller. IEEE Access 2021, 9, 129168–129177. [Google Scholar] [CrossRef]
- Khalil, M.M.; Atia, M.R.A.; Mabrouk, M.H. Improving vehicle rollover resistance using fuzzy PID controller of active anti-roll bar system. SAE Int. J. Passeng. Cars-Mech. Syst. 2019, 12, 35–50. [Google Scholar] [CrossRef]
- Stankiewicz, P.G.; Brown, A.A.; Brennan, S.N. Preview horizon analysis for vehicle rollover prevention using the zero-moment point. J. Dyn. Syst. Meas. Control 2015, 137, 091002. [Google Scholar] [CrossRef]
- Gao, J.; Yin, C.; Yuan, G. Warning and active steering rollover prevention control for agricultural wheeled tractor. PLoS ONE 2022, 17, e0280021. [Google Scholar] [CrossRef]
- Shao, K.; Zheng, J.; Huang, K. Robust active steering control for vehicle rollover prevention. Int. J. Model. Identif. Control 2019, 32, 70–84. [Google Scholar] [CrossRef]
- Rezapour, J.; Joo, B.B.; Jamali, A.; Jamali, A.; Zadeh, N.N. Multi-Objective Optimization of Nonlinear Controller for Untripped Rollover Prevention of an 8-dof Vehicle Dynamic Model. Appl. Mech. Mater. 2015, 4058, 775. [Google Scholar] [CrossRef]
- Tang, X.; Yang, K.; Wang, H.; Yu, W.; Yang, X.; Liu, T.; Li, J. Driving Environment Uncertainty-Aware Motion Planning for Autonomous Vehicles. Chin. J. Mech. Eng. 2022, 35, 120. [Google Scholar] [CrossRef]
- Zhang, L.; Li, L.; Qi, B. Rollover prevention control for a four in-wheel motors drive electric vehicle on an uneven road. Sci. China Technol. Sci. 2018, 61, 934–948. [Google Scholar] [CrossRef]
- Wang, Q.; Zhao, Y.; Lin, F.; Zhang, C.; Deng, H. Integrated control for distributed in-wheel motor drive electric vehicle based on states estimation and nonlinear MPC. Proc. Inst. Mech. Eng. 2022, 236, 893–906. [Google Scholar] [CrossRef]
- Wang, H.; Hou, L.; Shangguan, W.B. Research on Vehicle Rollover Warning and Braking Control System Based on Secondary Predictive Zero-Moment Point Position. SAE Int. J. Adv. Curr. Pract. Mobil. 2022, 4, 1689–1703. [Google Scholar] [CrossRef]
- Wang, M.; Liu, J.; Zhang, H.; Gan, L.; Xu, X.; He, J.; Chen, S. Vehicle rollover warning system based on TTR method with inertial measurement. Meas. Sci. Technol. 2022, 33, 015108. [Google Scholar] [CrossRef]
- Ge, R.; Guan, J.; Shi, C. Vehicle Rollover Warning System Based on MEMS. Adv. Mater. Res. 2013, 2438, 718–720. [Google Scholar] [CrossRef]
- Dong, M.; Fan, Y.; Yu, D.; Wang, Q. Research on Electric Vehicle Rollover Prevention System Based on Motor Speed Control. World Electr. Veh. J. 2021, 12, 195. [Google Scholar] [CrossRef]
- Guan, Q.; Gong, A.; Hu, M.; Liao, Z.; Chen, X. Anti-rollover warning control of dump truck lifting operation based on active suspension. J. Control Autom. Electr. Syst. 2021, 32, 109–119. [Google Scholar] [CrossRef]
- Zhang, L.X.; Yang, J.Y.; Wu, G.Q. Integrated control of semi-active suspension with electronic stability control system considering rollover. J Tongji Univ. Nat. Sci. Educ. 2016, 44, 402–410. [Google Scholar]
- Yim, S.; Jeon, K.; Yi, K. An investigation into vehicle rollover prevention by coordinated control of active anti-roll bar and electronic stability program. Int. J. Control Autom. Syst. 2012, 10, 275–287. [Google Scholar] [CrossRef]
- Qin, J.; Zhu, Z.; Ji, H.; Zhu, Z.; Li, Z.; Du, Y.; Song, Z.; Mao, E. Simulation of active steering control for the prevention of tractor dynamic rollover on random road surfaces. Biosyst. Eng. 2019, 185, 135–149. [Google Scholar] [CrossRef]
- Li, H.; Zhao, Y.; Lin, F.; Xiao, Z. Integrated yaw and rollover control based on differential braking for off-road vehicles with mechanical elastic wheel. J. Cent. S. Univ. 2019, 26, 2354–2367. [Google Scholar] [CrossRef]
- Najafi, A.; Tehrani, M.M. Roll stability enhancement in a full dynamic ground-tour vehicle model based on series active variable-geometry suspension. Int. J. Veh. Perform. 2022, 8, 188–223. [Google Scholar] [CrossRef]
- Tianjun, Z.; Wan, H.; Wang, Z.; Wei, M. Model Reference Adaptive Control of Semi-active Suspension Model Based on AdaBoost Algorithm for Rollover Prediction. SAE Int. J. Veh. Dyn. Stab. NVH 2021, 6, 71–86. [Google Scholar] [CrossRef]
- Van, T.V. Preventing rollover phenomenon with an active anti-roll bar system using electro-hydraulic actuators: A full car model. J. Appl. Eng. Sci. 2021, 19, 217–229. [Google Scholar]
- Arslan, M.S.; Sever, M. Vehicle stability enhancement and rollover prevention by a nonlinear predictive control method. Trans. Inst. Meas. Control 2019, 41, 2135–2149. [Google Scholar] [CrossRef]
- Wang, J.; Liu, M. Research on fuzzy differential braking anti-rollover control for heavy vehicles. Mech. Manuf. 2020, 4, 88–90. [Google Scholar]
- Li, S.; Zhou, J.; Ren, J. Anti-rollover control of a heavy-duty vehicle based on lateral load transfer rate. Vibroeng. Procedia 2016, 7, 129–133. [Google Scholar]
- Xie, Z.; Zhao, L.; Guo, K.; Zhang, Q. Differential braking anti-rollover control for heavy vehicles. China Mech. Eng. 2015, 26, 3402–3407. [Google Scholar]
- Xu, Z.M.; Yu, H.X.; He, Y.S.; Zhang, Z.F. Research on differential braking anti-rollover control for SUV vehicles. Automot. Eng. 2014, 36, 566–572. [Google Scholar]
- Xiao, F.; Gong, X.; Lu, Z.; Qian, L.; Zhang, Y.; Wang, L. Design and Control of New Brake-by-Wire Actuator for Vehicle Based on Linear Motor and Lever Mechanism. IEEE Access 2021, 9, 95832–95842. [Google Scholar] [CrossRef]
- Gong, X.; Ge, W.; Yan, J.; Zhang, Y.; Gongye, X. Review on the Development, Control Method and Application Prospect of Brake-by-Wire Actuator. Actuators 2020, 9, 15. [Google Scholar] [CrossRef] [Green Version]
- Montani, M.; Capitani, R.; Annicchiarico, C. Development of a brake by wire system design for car stability controls. Procedia Struct. Integr. 2019, 24, 137–154. [Google Scholar] [CrossRef]
- Yang, C.; Liang, R. Research on the development status and trend of chassis control technology by wire. E3S Web Conf. 2021, 268, 01040. [Google Scholar] [CrossRef]
- Zhang, L.; Yu, L.; Wang, Z.; Zuo, L.; Song, J. All-Wheel Braking Force Allocation During a Braking-in-Turn Maneuver for Vehicles With the Brake-by-Wire System Considering Braking Efficiency and Stability. IEEE Trans. Veh. Technol. 2016, 65, 4752–4767. [Google Scholar] [CrossRef]
- Yakub, F.; Lee, S.; Mori, Y. Comparative study of MPC and LQC with disturbance rejection control for heavy vehicle rollover prevention in an inclement environment. J. Mech. Sci. Technol. 2016, 30, 3835–3845. [Google Scholar] [CrossRef]
- Duanfeng, C.; Yun, L.X.; Chaozhong, W.; Ming, Z. Smooth sliding mode control for vehicle rollover prevention using active antiroll suspension. Math. Probl. Eng. 2015, 2015, 478071. [Google Scholar]
- Kang, S.P.; Dong, H.; Qi, C.Q.; Wang, H. Anti-rollover control of buses using vehicle state estimation. Mech. Manuf. 2022, 7, 10–13. [Google Scholar]
- Zhu, T.J.; Zong, C.F.; Li, F.; Yang, Y. Research on robust control algorithm for anti-rollover of heavy vehicles based on linear matrix inequalities. Automot. Eng. 2012, 34, 394–398. [Google Scholar]
- Zong, C.; Han, X.-J.; Zhao, W.; Wen, Z.-Y. Anti-rollover control for buses based on dynamic LTR. China J. Highw. 2016, 29, 136–142. [Google Scholar]
- Wang, F.; Lu, Y.; Li, H. Heavy-duty vehicle braking stability control and HIL verification for improving traffic safety. J. Adv. Transp. 2022, 2022, 5680599. [Google Scholar] [CrossRef]
- Zhang, Q.; Jiang, M.; Yuan, Y.; Fan, Z.; Chen, S. A novel coordinated control strategy of regenerative braking and anti-lock system for electric vehicles. Proc. Inst. Mech. Eng. D 2022. [Google Scholar] [CrossRef]
- Moshayedi, A.J.; Li, J.; Sina, N.; Chen, X.; Liao, L.; Gheisari, M.; Xie, X. Simulation and Validation of Optimized PID Controller in AGV (Automated Guided Vehicles) Model Using PSO and BAS Algorithms. Comput. Intell. Neurosci. 2022, 2022, 7799654. [Google Scholar] [CrossRef] [PubMed]
- Moshayedi, A.J.; Roy, A.S.; Taravet, A.; Liao, L.; Wu, J.; Gheisari, M. A Secure Traffic Police RemoteSensing Approach via a Deep Learning-Based Low-Altitude Vehicle Speed Detector through UAVs in Smart Cites: Algorithm, Implementation and Evaluation. Future Transp. 2023, 3, 189–209. [Google Scholar] [CrossRef]
- Dong, W.; Cao, Z.; Zhao, P.; Yang, Z.; Yuan, Y.; Zhao, Z.; Chen, D.; Wu, Y.; Xu, B.; Venkateshkumar, M. A segmented optimal PID method to consider both regulation performance and damping characteristic of hydroelectric power system. Renew. Energy 2023, 207, 1–12. [Google Scholar] [CrossRef]
- Zafer, B.; Kursad, G. Intelligent-PID with PD Feedforward Trajectory Tracking Control of an Autonomous Underwater Vehicle. Machines 2023, 11, 300. [Google Scholar]
- Zhang, H.; Hu, J.; Wu, G.; Bu, W. Simulation of Networked Control Systems Based on Single Neuron Adaptive PID with Smith Predictor. Eng. Lett. 2023, 31, 1–5. [Google Scholar]
- Hakan, D.M.; Mehmet, D. Designs of Particle-Swarm-Optimization-Based Intelligent PID Controllers and DC/DC Buck Converters for PEM Fuel-Cell-Powered Four-Wheeled Automated Guided Vehicle. Appl. Sci. 2023, 13, 2919. [Google Scholar]
- Zamani, A.; Etedali, S. A new framework of multi-objective BELBIC for seismic control of smart base-isolated structures equipped with MR dampers. Eng. Comput. 2022, 38, 3759–3772. [Google Scholar] [CrossRef]
- Zamani, A.; Etedali, S. Seismic structural control using magneto-rheological dampers: A decentralized interval type-2 fractional-order fuzzy PID controller optimized based on energy concepts. ISA Trans. 2023, in press. [Google Scholar] [CrossRef]
- Zhang, P.; Chen, W.; Wang, H.; Wang, J.; Lu, H.; Cheng, Z. Fuzzy PID control method for damping of electronically controlled air suspension shock absorbers for vehicles. Eng. Res. Express 2022, 4, 045020. [Google Scholar] [CrossRef]
- Huang, M.; Zheng, M.; Zhang, B. A study on vehicle rollover-stability dynamics based on the energy approach. J. Vib. Shock. 2016, 35, 164–174. [Google Scholar]
- Lewis, A.S.; El-Gindy, M. Sliding mode control for rollover prevention of heavy vehicles based on lateral acceleration. Int. J. Heavy Veh. Syst. 2003, 10, 9–34. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name, Symbol/Legal Unit of Measure | Value |
|---|---|
| Overall vehicle mass m/kg | 2515 |
| Spring mass ms/kg | 1780 |
| Wheelbase d/m | 1.478 |
| Distance from center of mass to front axle lf/m | 1.485 |
| Distance from center of mass to rear axle lr/m | 1.265 |
| Distance from center of mass to rear axle h/m | 0.484 |
| Inertia around z-axis Iz/kg·m2 | 3300 |
| Inertia around the x-axis Ix/kg·m2 | 1000 |
| Front-wheel lateral deflection stiffness kf/(N/rad) | 44,400 |
| Rear-wheel lateral deflection stiffness kr/(N/rad) | 43,600 |
| Suspension equivalent damping coefficient c | 2000 |
| Suspension Sway Stiffness ks/(N·m/rad) | 44,500 |
| Gravitational acceleration g/(m/s2) | 9.8 |
| ΔKP | EC | |||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | ||
| E | NB | PB | PB | PM | PM | PS | ZO | ZO |
| NM | PB | PB | PM | PS | PS | ZO | NS | |
| NS | PM | PM | PM | PS | ZO | NS | NS | |
| ZO | PM | PM | PS | ZO | NS | NM | NM | |
| PS | PS | PS | ZO | NS | NS | NM | NM | |
| PM | PS | ZO | NS | NM | NM | NM | NB | |
| PB | ZO | ZO | NM | NM | NM | NB | NB | |
| ΔKi | EC | |||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | ||
| E | NB | NB | NB | NM | NM | NS | ZO | ZO |
| NM | NB | NB | NM | NS | NS | ZO | ZO | |
| NS | NM | NM | NS | NS | ZO | PS | PS | |
| ZO | NM | NM | NS | ZO | PS | PM | PM | |
| PS | NM | NS | ZO | PS | PS | PM | PB | |
| PM | ZO | ZO | PS | PS | PM | PB | PB | |
| PB | ZO | ZO | PS | PM | PM | PB | PB | |
| ΔKd | EC | |||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | ||
| E | NB | PS | NS | NB | NB | NB | NM | PS |
| NM | PS | NS | NB | NM | NM | NS | ZO | |
| NS | ZO | NS | NM | NM | NS | NS | ZO | |
| ZO | ZO | NS | NS | NS | NS | NS | ZO | |
| PS | ZO | ZO | ZO | ZO | ZO | ZO | ZO | |
| PM | PB | NS | PS | PS | PS | PS | PB | |
| PB | PB | PM | PM | PM | PS | PS | PB | |
| Steering | LTR | Brake Wheel |
|---|---|---|
| Turn left | Right front wheel | |
| Turn right | Left front wheel |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Xu, X.; Chen, S.; Guo, N.; Yu, Z. Vehicle Rollover Warning and Control Based on Attitude Detection and Fuzzy PID. Appl. Sci. 2023, 13, 4339. https://doi.org/10.3390/app13074339
Wang R, Xu X, Chen S, Guo N, Yu Z. Vehicle Rollover Warning and Control Based on Attitude Detection and Fuzzy PID. Applied Sciences. 2023; 13(7):4339. https://doi.org/10.3390/app13074339
Chicago/Turabian StyleWang, Ruiyang, Xiangbo Xu, Shao Chen, Ningyan Guo, and Zhibin Yu. 2023. "Vehicle Rollover Warning and Control Based on Attitude Detection and Fuzzy PID" Applied Sciences 13, no. 7: 4339. https://doi.org/10.3390/app13074339
APA StyleWang, R., Xu, X., Chen, S., Guo, N., & Yu, Z. (2023). Vehicle Rollover Warning and Control Based on Attitude Detection and Fuzzy PID. Applied Sciences, 13(7), 4339. https://doi.org/10.3390/app13074339