1. Introduction
Since its discovery in 2014, laser-induced graphene (LIG) has shown great prospects in the field of wearable devices and systems [
1]. This graphene material has a flexible three-dimensional (3D), porous structure and possesses excellent electrical and mechanical properties. The maskless direct laser writing process makes the material suitable for large-scale, low-cost device fabrication [
2,
3]. Moreover, because LIG has few constraints regarding its substrate material and growing environment, it is a promising candidate to meet the massive demand for high-performance wearable devices for applications such as health care and HCI [
4,
5,
6].
In our previous work, we reviewed trends in wearable devices over the recent years [
7,
8,
9]. The first trend encompassed the multifunctionality of the devices. The reason for their development was to meet the requirements of long-term daily usage when applied to health care and HCI. Such requirements can generally not be met using a single signal or a single function, so the development of devices has gradually shifted from a device level to a system level [
10,
11,
12]. Wearable devices can now not only perform individual functions such as sensing or actuating, but they are also becoming integrated systems that can realize multi-mode sensing [
13,
14], and are even endowed with a power supply [
15] and signal acquisition–processing–transmission–feedback [
16]. The second main trend treats intelligent systems. Wearable devices are becoming smarter systems that can not only realize basic signal processing functions but can also use intelligent algorithms for disease diagnosis or intelligent HCI [
17,
18]. These two development trends are not independent of each other. At present, quite a number of research reports on wearable systems for health care and HCI comprehensively consider endowing devices with multifunctional and intelligent characteristics to achieve systems more in line with the requirements of the applications [
19,
20,
21].
In this review, given the requirements for applications of wearable systems for health care and HCI, we introduce the recent advances in LIG-based multifunctional and intelligent wearable systems for health care and HCI applications, each with eight typical examples. Their design ideas, preparation processes, performance, and application demonstrations are summarized and analyzed. Moreover, the possible development directions of multifunctional and intelligent LIG-based wearable systems will be discussed.
2. LIG-Based Wearable Systems for Multifunctional and Intelligent Health Care
When applied to sensors, LIG is effective for monitoring a range of physiological signals such as electrophysiological signals, temperature, electrochemical signals, and mechanical signals. Recently, there has been a growing interest in researching multifunctionality in LIG-based devices due to the increasing demand for systematization. This is primarily due to the following reasons. First, many diseases and health conditions are evaluated based on a combination of physiological signals, so multi-mode physiological signal monitoring is crucial for LIG-based wearable systems. Second, LIG-based wearable systems are becoming “portable doctors” to meet the needs of long-term health monitoring in daily life. This means that LIG-based wearable systems can not only collect physiological information, but also process or transmit physiological information in situ, and even realize the diagnosis and treatment of diseases. This kind of application demand puts forward the requirements of integrated, all-in-one, self-powered, and intelligent LIG-based wearable systems [
22,
23,
24,
25].
This section presents eight examples of LIG-based wearable systems in health care to illustrate the use of LIG in monitoring multi-physiological signals, providing multi-functional health care, and enabling intelligent diagnosis and treatment. The eight systems described in this section represent several distinctive efforts for daily long-term health care applications including the gas permeable system, green system, self-alarm system, self-powered system, machine learning-based system, the system with actuators, anti-interference system, and multi-model system. We will start with the application requirements they solve, introduce their manufacturing process and performance, and discuss their application prospects in detail.
2.1. Gas-Permeable and Multifunctional On-Skin System
The LIG-based wearable system must be designed to accommodate the daily wear and tear it will face without hindering the wearer’s daily activities while also minimizing the impact of the wearer’s activities on the functionality of the system. If the on-skin wearable system is gas-permeable, it can avoid interfering with the perspiration of the wearer, which may cause redness or inflammation, and can improve comfort during daily long-term wearing.
To make the LIG-based wearable system gas-permeable, Sun et al. proposed a gas-permeable and multifunctional on-skin wearable system based on a sugar-templated porous substrate [
10]. The fabrication process of the on-skin wearable system is shown in
Figure 1. A variety of LIG-based devices including electrophysiological signal electrodes, hydration sensors, temperature sensors, and joule-heating elements were realized by CO
2 laser writing on polyimide (PI). By designing open-mesh patterns and serpentine layouts, the sensors adapt to the stretching of the human skin during wearing. To achieve the gas-permeability, they used a soft silicone elastomer (Young’s modulus ~170 kPa) and cane sugar powders to make the porous elastomer substrate. The silicone elastomer was mixed with the sugar powder at a 1:2 weight ratio. When the mixture was partially cured, the LIG-based devices on the PI substrate were transferred onto the elastomer–sugar composite substrate through direct transfer printing with added pressure. Finally, the composite substrate with LIG devices was cured at room temperature and the sugar template was dissolved with deionized water to form a porous sponge-like elastomer substrate. Since the on-skin system consists of a porous LIG layer and porous elastomer substrate, the whole system has good gas permeability (water-vapor permeability ~18 mg cm
−2 h
−1).
LIG-based devices in this LIG-based wearable system prepared using the same method can enable the wearable system to achieve multiple functions. The electrophysiological electrodes can detect high-quality signals from EEG (electroencephalogram), ECG (electrocardiograph), and EMG (electromyography). The hydration sensor consists of a LIG-based coaxial dot-ring structure and can be used to detect the skin impedance and reflect the skin hydration level. The multi-modal temperature device can be used for both temperature sensing and joule-heating.
The realized wearable system enables the monitoring of a variety of key physiological signals and can realize health interventions (such as heat packs). These wearable systems have scalable functionalities where manufacturing new devices, sensors, or actuators can easily be added to meet the changing needs. Most significantly, the gas-permeability makes wearable systems more suitable for daily long-term wear. This will be an important requirement for the practical development of wearable systems, which is of great significance for improving the comfort of wearers. In the next section, we will introduce another important development direction of wearable systems, namely, the development of degradable wearable systems with low cost to meet the requirements of green applications and large-scale applications.
2.2. Electronically Enhanced Paper-Based Green Wearable System
The research of wearable systems has recently focused on the development of degradable green electronic devices. Some studies have attempted to replace non-degradable materials like PI with degradable ones to mitigate the environmental impacts of LIG-based wearable systems [
3,
4]. Although precursors like paper sheets or cardboard, which consist of aliphatic-rich cellulose, can serve as templates for graphitization, they do not possess the intrinsic aromatic carbon structure that can help the graphitization process. As a result, LIG made from cellulose-rich precursor materials does not perform electrical and chemical properties as well as LIG using common polymer precursors.
Faced with this challenge, Pinheiro et al. increased the conductive properties of paper-based LIG by introducing external aromatic moieties and controlling the laser fluence meticulously [
11].
Figure 2 shows the conceptual graph of the paper-based system. The manufacturing processes of the paper-based wearable system are as follows. First, the wax-treated paper substrate is irradiated using a laser with different spot-size focus profiles to depolymerize, deoxygenize, and dehydrate the aliphatic carbon rings within the cellulose and the hydrocarbon and aromatic structures in the wax. This pyrolysis process leads to the graphitization of the paper-based substrate and produces LIG. Second, once the LIG-based devices are made through laser treatment, they are separated from the paper substrate through deionized water as the cellulose fibers and fibrils have a higher affinity for water due to the hydrogen bonds they contain. The LIG-based devices are then transferred onto a medical-grade polyurethane tape with a polyacrylate glue surface, resulting in the creation of a multi-functional LIG-based wearable system.
The paper-based LIG produced a Pt NP (platinum nanoparticle)-decorated electrochemical sensor, strain sensor, electrode, and micro-supercapacitor (MSC) with a polyvinyl alcohol (PVA)/H2SO4 electrolyte that were able to perform four functions. These functions included detecting H2O2 concentrations in human sweat, monitoring radial artery pressure wave and pulse, monitoring ECG signals, and energy storage.
This work showed a sustainable LIG-based wearable system that could realize multi-modal health monitoring and kinetic energy harvesting and storage, and the system showed potential in self-powered daily autonomous health monitoring. Beyond that, recyclable or self-healing wearable systems are also a competitive development direction for green wearable systems.
In addition to the above efforts in the material and fabrication process development of realizing gas-permeable and sustainable wearable systems, we will introduce the functional development direction of wearable systems for health care applications in the following sections including the realization of self-alarm and self-powered systems.
2.3. Self-Alarm Health-Monitoring System
Every year, numerous deaths are caused by sudden illnesses such as cardiovascular diseases and sleep apnea, which can occur unexpectedly in daily life. While wearable health monitoring systems can track important physiological signals of the user in real-time, they lack the ability to provide feedback or warnings. This issue may result in patients missing vital opportunities for rescue.
To address this problem, Chen et al. developed a LIG-based dual-functional wearable system that not only monitors physiological signals, but also has a self-alarm function [
14]. The functional diagram of the self-alarm system is shown in
Figure 3, where LIG-based strain sensors and acoustic devices are used to monitor sleep respiration and to warn of abnormalities. In this system, the LIG-based strain sensors and acoustic devices were all realized by using the laser direct writing technique on a PI substrate.
When used as strain sensors, these LIG-based devices are capable of detecting pulse signals on the human wrist, revealing clear percussion (P), tidal (T), and diastolic (D) waves. Additionally, when used as a sensor on a facial mask, it can continuously monitor respiration signals during sleep. With its high sensitivity, the strain sensor is able to accurately detect muscle movements and voices with high resolution. When attached to the human throat, the sensor can distinguish different words spoken by the wearer while recoding laryngeal movements such as coughing and swallowing. When used as an acoustic device, the LIG-based device can emit sound with a wide frequency range (200~20 kHz) under the excitation of alternating voltage based on the thermoacoustic effect of graphene, and the sound pressure level (SPL) can reach over 60 dB between approximately 15 and 20 kHz.
With excellent mechanical and acoustical characteristics, the dual-functional LIG-based wearable system can monitor respiration during sleep and the pulse during daily life. When symptoms of sleep apnea or cardiac arrest are detected, the system will sound an alarm through the LIG-based acoustic device to alert the wearer and those around them to intervene. The integration of physiological signal monitoring and alarm functions opens up possibilities for the creation of all-in-one daily health monitoring systems.
2.4. Self-Powered Sensing System
Wearable systems have consistently been the focus of research due to the need for a stable energy supply. For a LIG-based wearable system to be used for extended periods of daily life, it must possess a dependable self-powering capability. While some studies have shown that combining a stretchable energy harvester, power management circuit, and energy storage unit can lead to self-charging capability [
26,
27], many systems still struggle with low and inconsistent energy output, particularly during body movements that cause deformation.
To realize a simple and stable self-powered health monitoring system, Zhang et al. proposed a LIG-based self-powered sensing system driven by human motion [
15].
Figure 4 shows the concept diagram, structure, photos, preparation process, and circuit schematic of the self-powered sensing system. The 3D porous structure of LIG with high specific surface area and excellent charge transport ability provide effective flows of triboelectric electrons in the triboelectric nanogenerator (TENG). To enhance energy density, the LIG foam can be surface coated or doped to form MSC arrays. For instance, the addition of Au nanoparticles in LIG results in a TENG with an output voltage of 320 V, and the output power was as high as 0.022 W, even when subjected to a strain of 40%, which exceeds the stretching limit of human skin. The LIG-based MSC arrays have a PVA/H2
SO
4 gel electrolyte and the LIG foam acts as the active material, the current collector, and the conductive substrate. The MSC arrays can deliver a maximum energy density of 0.569 μWh cm
−2 at a power density of 0.014 mW cm
−2. To achieve a stable energy supply module, a power management circuit was used to integrate the LIG-based TENG and the LIG-based MSC arrays.
This self-powered system can collect energy from human movements and convert it into a consistent energy source for sensors and other electrical devices. Key LIG-based physiological sensors such as strain sensors, temperature sensors, and electrodes are integrated into the self-powered system to monitor various physiological signals such as pulse, motion, temperature, blood pressure, blood oxygen, and ECG. Furthermore, using Bluetooth, the physiological signals can be transferred wirelessly to mobile devices for display and further processing. These typical physiological signals can be used to assess the health condition of people and can help realize the early diagnosis of cardiovascular diseases, chronic wounds, diabetes, hyperuricemia, etc. This early detection helps in reducing the cost of medical examinations and alleviates the pressure on the health care system.
The realized innovative health monitoring system, which is self-powered, wireless, and multi-functional, enables the simultaneous monitoring and transmission of multiple physiological signals in an integrated and cost-effective manner, providing a platform for the future of self-powered wearable technologies. This is crucial to solving the problem of power supply for the daily long-term use of wearable health monitoring systems. Next, we will look at the value of empowering wearable systems with intelligence for high-performance health care applications.
2.5. Machine Learning-Based Multi-Modal Electrochemical Analytical System
The detection of multiple biomolecules is crucial in various fields including disease diagnosis, environmental monitoring, and food safety. However, it is challenging to use a single material such as LIG to accurately detect multiple biomolecules in a mixture.
To address this challenge, Kammarchedu et al. proposed an electrochemical analytical wearable system that integrates LIG-based devices with machine learning algorithms. As shown in
Figure 5, this system enables the multiplexed detection of tyrosine and uric acid in both sweat and saliva. The LIG-based electrochemical sensor was realized by irradiating a commercial CO
2 laser system. The three-electrode sensor consisted of a working electrode (eMoS
x-LIG), a counter electrode (LIG), and a reference electrode (LIG). The working electrode was made functional through the addition of MoS
x through electrodeposition, which led to a significant improvement in the sensor’s performance with a 3-fold increase in the electrochemically active specific surface area (ECSA) and a 1.5-fold increase in the heterogeneous electron transfer rate when compared to the bare LIG-based electrode. In order to fulfill the need for extensive electrochemical data in machine learning, a specialized sensor bracket was created to simultaneously gather signals from eight LIG-based sensors.
To test the multi-modal system, artificial saliva and artificial sweat with different concentrations of tyrosine and uric acid were prepared. The acquired data were used to train the algorithm for automatic baseline subtraction with integrated feature extraction. Due to the multi-modal and multi-peak analysis, the algorithm could reduce the limit of detection (LOD) of the system by two orders of magnitude. Furthermore, with the help of the algorithm, the system could quantify each kind of biomolecule in a mixture and realize multiplexed detection using a single sensor. Moreover, on-body sweat analysis showed that compared to a single sensor, the multi-modal system combined with machine learning could accurately quantify the analyte concentration in the mixture.
The combination of wearable electrochemical monitoring and machine learning makes it possible for the LIG-based wearable system to accurately collect and analyze real-time concentrations of diverse biochemical components, which holds great potential for applications in health care, environmental detection, and food safety. In addition to the highly sensitive information collection and high-performance intelligent information analysis (diagnostic function), if the wearable system can also achieve a therapeutic function, it will give it the basic capability of a “portable doctor”. Next, we introduce the possibility of wearable therapy with LIG by using the implementation of LIG-based soft actuators as an example.
2.6. Electrothermally Controlled Soft Actuators for On-Demand Health Care
A comprehensive wearable health care system should not only track physiological signals, but also provide “physician-like intervention” to allow for real-time physiological signal monitoring, feedback, and treatment capabilities, similar to a medical professional.
To address this requirement, Ling et al., proposed an electrothermally controlled, mechanically guided, 3D assembly actuator based on LIG [
19]. The actuator consisted of three layers including the PI, LIG, and polydimethylsiloxane (PDMS). The LIG acts as a flexible heater to heat the PI layer and PDMS layer on demand. Due to the difference in the thermal expansion coefficient of PI and PDMS, the temperature change of LIG led to the deformation of the PI layer and PDMS layer in different degrees, thereby enabling the electrothermally controlled actuator to function. Inspired by kirigami and origami, the actuator can be customized to different shapes through precise structural design and modeling and forming a variety of actions and 3D structures under different control voltages. The LIG-based actuator could realize an excellent bending angle of 1080° and a bending curvature of 3.3 cm
−1. Furthermore, the actuator could bend from 0° to 180° in about 3 s and recover in about 4 s.
In terms of physiological signal monitoring, the actuator could simulate a doctor’s hand to achieve on-demand gesture interaction and ECG monitoring. As shown in
Figure 6, by using three LIG-based sensors to monitor the EMG signals of the skin, the structure of the flower-shaped LIG-based actuator could be controlled using hand gestures. Additionally, actuators can act as resonators with gesture-controlled bandgap behaviors. Furthermore, similar to a doctor’s palpation, by controlling the deformation of the actuator like a human finger, the ECG electrodes on the actuator can selectively collect the ECG signal on demand. Moreover, the authors showed that the actuator could lift up to 110 times its weight when used as an artificial muscle.
This study highlights the potential for wearable systems equipped with LIG-based actuators to perform on-demand health monitoring, disease diagnosis, and treatment. This opens the door for creating wearable systems that mimic a doctor’s abilities, with the added ability to independently provide treatment. However, doctors often refer to multiple physiological signals in the actual diagnosis of diseases. How to collect various physiological information without interfering with each other is important to achieve accurate diagnosis with wearable systems. In the next section, we will describe how to give the multi-functional sensing system an anti-interference capability to achieve the high-quality acquisition of a variety of physiological signals.
2.7. Multifunctional Sensing System with an Anti-Interference Design
Multifunctional sensing systems are of great significance in health monitoring. In order to accurately measure multiple physiological signals, it is crucial to eliminate any interference between them.
Wang et al. invented a double-sided wearable system that both enables multi-modal sensing and avoids the interference between various signals [
20].
Figure 7 shows the structure diagram of the system. The system allows for multi-modal sensing of the electrophysiological signals (ECG, EMG, etc.), mechanical stimuli/movements (strain, pressure, proximity), concentrations of sodium ions (Na
+), hydrogen ions (H
+), acetone gas, and nitrogen dioxide (NO
2), and has an energy collection and storage unit. The structure of the double-sided system enables the placement of skin-interacting sensors such as body temperature, electrophysiological, and ion sensors on the inside, while motion, room temperature, distance, and gas sensors, which interact with limbs and the external environment, are placed on the outside.
To enhance the system’s anti-interference capabilities, several measures were taken. First, the locations of the sensors and power units followed the anatomy of the muscles and joints of the human hand. For example, the EMG sensors were located on the thenar area where muscles are relatively active, and the ion sensors were located on the palm where it is easy to collect a large amount of sweat. Second, serpentine interconnection was used between each module to alleviate the noise caused by the movement of the wearer while minimizing the impact on the wearer’s comfort. Third, through the design of the LIG processing technique, different LIG-based sensors adopted customized process parameters to satisfy the requirements of sensing performance while alleviating the interference on sensors caused by external strain. Fourth, because many sensors are sensitive to temperature, to eliminate the influences of temperature, an important step is to test the temperature response of different sensors. After that, the temperature sensor contained in the system was used to record the temperature change in real-time, and the temperature compensation was used to eliminate the temperature drift from the test results to obtain reliable physiological signals. Finally, to eliminate the interferences of proximity, moisture, static electricity, and normal pressure on the sensing performances, the use of encapsulation is an effective approach. Gas sensors and physiological electrodes were designed to be resistant to proximity and pressure, while other sensors were packaged using Ecoflex to protect them from moisture and chemicals. Furthermore, in chemical sensors, their packages should have small windows so that the sensors can interact with the test objects.
With the help of the above measures, the LIG-based wearable system realized in this work had a rich multi-mode signal monitoring ability and strong anti-interference ability compared to the previous work. Most significantly, its anti-interference ability, self-powered ability, and multi-mode signal monitoring ability enabled it to have great functional expansion space and wide application prospects. To further construct an information closed-loop wearable system to realize a complete information collection–transmission–processing–feedback function, we introduce a method to realize information feedback to wearers in the next section.
2.8. Integrated Multi-Modal Wireless System with Feedback Functions
For those who have limited ability to care for themselves such as the elderly, disabled, and infants, health monitoring systems that not only provide long-term daily use but also feedback and alarm functions are especially crucial.
Considering the high rate of sudden infant death during sleep, Xu et al. developed a wearable system suitable for real-time health monitoring and the alerting of abnormal physical conditions of infants during sleep or in the intensive care unit [
21]. The system can monitor the sleeping postures, respiration rate, and diaper moisture wirelessly, and immediately provide an alarm if there are any abnormal situations. To continuously track the baby’s sleep status with high comfort, the whole flexible system (in addition to mobile signal analysis software) was integrated into the diaper using a customized layout. As shown in
Figure 8, the system consisted of three components: flexible sensor sheets, a flexible processing circuit with a Bluetooth module, and a mobile phone with a signal analysis and alarm module. The flexible sensor sheets contained three kinds of sensors including a tilt sensor, a respiration sensor, and a humidity sensor. The tilt sensor was used to record sleeping postures. This encapsulates a non-toxic gallium-based liquid metal droplet in a laser etching hollow space with PDMS and bare LIG electrodes and uses its slide to feel the baby’s postures. To sense the sliding posture of the liquid metal droplet, eight pairs of LIG-based electrodes were realized using a two-step laser direct writing process, where the rough surface of LIG allows the liquid metal droplet to slide freely on it. The attachment and separation between the electrode and the liquid metal droplet caused by the different tilt directions of the sensor belonged to the “on” and “off” states, respectively. Eight pairs of electrodes could distinguish the eighteen tilt angles. Based on the tilt sensor, the system could distinguish whether the baby was in a good sleeping position. The respiration sensor was realized using a strain sensor made by infiltrating a PDMS solution into a porous LIG layer. The respiration rate was sensed using the skin deformation of the baby’s chest and abdomen. The humidity sensor used stacked ZnIn
2S
4 as the active sensing material and porous interdigital LIG as electrodes to promote the absorption and desorption of water vapors. In addition, there was a moisture-proof film on the surface of the sensor to avoid skin damage or material contamination caused by direct contact between the water and ZnIn
2S
4. The humidity sensor could also tell whether the diaper needed to be changed.
The whole system can monitor the baby’s sleep position, breathing, body surface humidity, and other key information without affecting the baby’s normal sleep, and transmit the information wirelessly to the neonatal nurses’ mobile phone in real-time. When there are abnormal conditions such as abnormal infant posture, suffocation, and excretion, the system can sound a timely alarm that alerts the personnel to intervene, reducing the probability of sudden infant death and the pressure on the workers. In addition, the system is also suitable for the elderly and disabled auxiliary care, and more sensors can be added based on the wearer’s disease characteristics to achieve targeted health monitoring.
It can be seen from this research that long-term wearing comfort, long-term signal acquisition capability, and closed-loop feedback capability are the key conditions for an integrated wearable health care system suitable for daily applications.
3. LIG-Based Wearable Systems for Multifunctional and Intelligent HCI
Human–computer interfaces, which serve as the foundation for the interaction between humans and machines, have been extensively utilized in various fields such as robot control, virtual reality (VR), augmented reality (AR), and autonomous driving. The growing interest in the metaverse in 2021 spotlighted the crucial role of HCI systems. Similar to the health care system above-mentioned, HCI systems are also developing toward a more wearable, multifunctional, and intelligent design due to several factors. (1) The miniaturization of the HCI system, which is necessary for long-term usage in daily life, can be achieved through advancements in device-integrated technology. Especially with the development of flexible sensors, actuators, and circuits, more and more HCI systems are becoming flexible and even stretchable. On one hand, this enhances the comfort of human objects in wearing the device, while on the other hand, it makes machine objects more adaptable, particularly on irregular surfaces that are challenging for conventional HCI devices [
28,
29]. (2) HCI systems are becoming increasingly multifunctional and equipped with a variety of sensors, actuators, and other interactive modules. This trend enables HCI systems to perform a wider range of tasks and cater to a diverse array of application objects including humans, animals, plants, and robots as well as various application environments such as land and sea [
30,
31,
32,
33]. (3) The integration of system functions and the improvement in system integration has led to increased information processing demands for HCI systems. In response to this trend, HCI systems have become more intelligent, utilizing intelligent algorithms to enhance the collection, transmission, and analysis of information. Additionally, there has been an emphasis on improving the information processing efficiency through the integration of sensing, storage, and computing capabilities in HCI systems [
12,
13,
16,
34].
In this section, we explore the applications of LIG in human–computer interfaces by using eight typical LIG-based wearable HCI systems as examples. The eight systems described in this section represent several distinctive efforts for diversified HCI applications including highly sensitive system, multi-signal collaborated system, dual-function acoustic system, intelligent and multifunctional system, intelligent artificial throat, bioinspired dual-channel system, non-contact HCI system, and closed-loop system. We will start with the specific application scenarios for which they are designed, introduce their manufacturing process and performance, and discuss their application prospects in detail.
3.1. LIG and Liquid Metal Integrated Multifunctional Wearable HCI System
The development of high-sensitivity motion detection is crucial for monitoring human movement, robot activity, and human–machine interaction. In particular, the development of HCI systems that can achieve highly sensitive motion interaction is of great significance for robot control, which can realize high-precision remote surgery, remote robot control, and so on.
Babatain et al. developed an integrated multifunctional wearable HCI system for motion monitoring and human–machine interfacing through the clever combination of LIG and liquid metal [
12]. Similar to the work mentioned in
Section 2.8, this work also determined motion by detecting the contact between a sliding liquid metal droplet and the LIG electrode. However, this work improved the sensitivity of motion monitoring by using the principle of inertial sensing and improving the sliding ability of the liquid metal droplet on the PI-based flexible substrate. The LIG particles provided a 3D interpenetrated shell around the liquid metal droplet to prevent infiltration to laser-treated PDMS, PI, and LIG surfaces, which allowed the liquid metal droplet to slide in the sensing channel freely. Moreover, by designing the arc structure composed of the PI substrate, PDMS package, and LIG interfinger electrode, the liquid metal droplet could slide freely under the influence of acceleration and quickly return to the initial point thanks to gravity. This ensures accurate real-time acceleration monitoring and direct reading.
Figure 9 displays a graphical representation of the wearable system. A wireless PSoC (programmable system on chip) was used to realize multi-channel signal processing and wireless transmission. The LIG-based humidity sensor, temperature sensor, and strain sensor were used to record the temperature and humidity information of the human body, robot, or environment, and the strain information of the human or robot during movement. A pair of liquid metal-based inertial sensors was used to monitor the acceleration and the force applied to the system when the acceleration was applied. The sensors, electrodes in inertial sensors, and interconnects in this wearable HCI system were all made by laser direct writing technology and were further encapsulated by PDMS if necessary. Ag paste was used on the contact pads to realize the electrical connection between the PSoC and the other external modules. The inertial sensor demonstrated a high sensitivity of 6.52% m
−1 s
2 in an acceleration range from 1 to ~30 m/s
2 at the 0.167 Hz low frequency.
During the demonstration, the multifunctional HCI system realized a highly sensitive human/robot motion monitoring, and the human wearer realized the precise control of a robotic arm. The system can not only be used to collect physiological information such as human movement to realize health and safety monitoring but can also be used to accurately record the motion state of the robot, determine if their functions are normal, and provide real-time feedback. One of the most notable features of this system is its ability to establish a closed-loop remote interaction between humans and robots. After further integration with motion execution units and realizing 3D high sensitivity inertial sensing, this wearable HCI system is expected to play an important role in telemedicine and robot remote control in the future.
In this section, we show the wearable HCI system with multiple functions. However, how to coordinate multiple functions, especially multiple signals, to achieve the application effect of “1 + 1 > 2” is of great significance for the practical application of a wearable HCI system. In the next five sections, we will introduce different methods of collaborating various signals in HCI systems.
3.2. Electrooculography and Tactile Perception Collaborated 3D HCI System
Traditional HCI systems have limitations in their ability to perform well in multi-scene applications or 3D interactive experiences as they rely on a single type of device or signal.
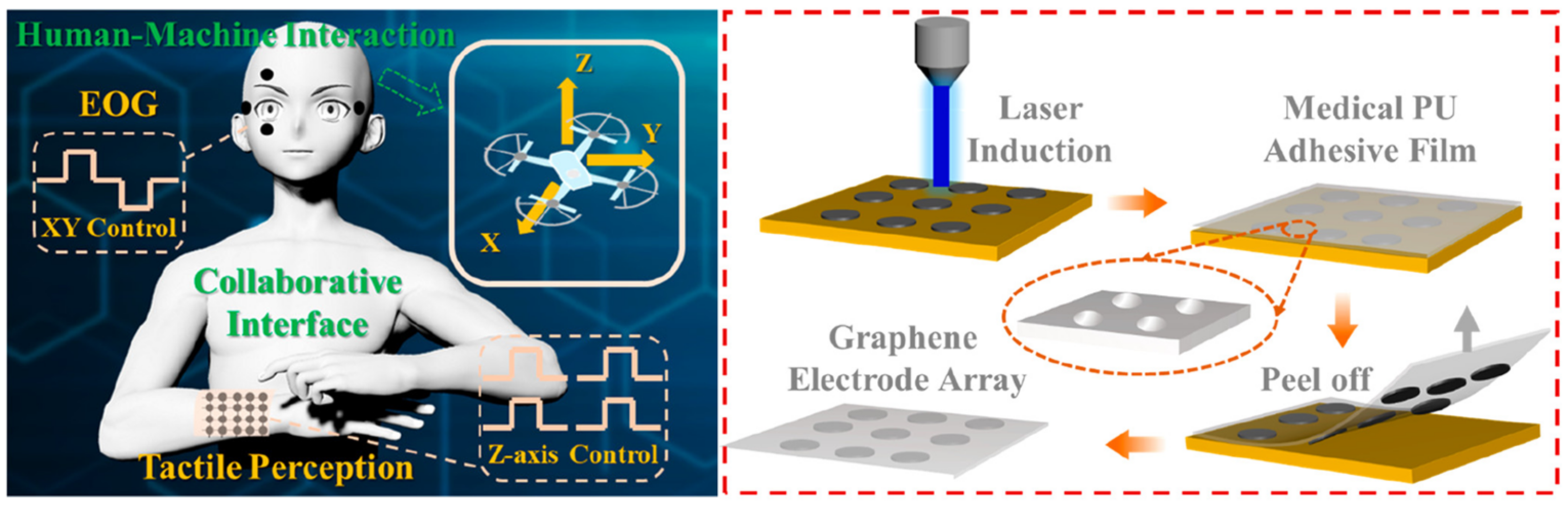
To address this issue, Xu et al. proposed an electrooculography (EOG) and tactile perception collaborated wearable HCI system that could realize accurate and convenient interaction in three dimensions [
13]. As shown in
Figure 10, the system consisted of two parts: the EOG interaction module and the tactile array module. Both LIG-based modules were made by transferring a laser-induced sensor pattern from the PI substrate onto a flexible and stretchable medical PU (polyurethane) adhesive film. The difference was that the EOG module used the LIG layer as the electrode and was in direct contact with the skin. The system, therefore, adopted a single-sided structure that was not encapsulated, while the capacitive 4 × 4 tactile array module consisted of two LIG-PU films stacked together in the same direction: one layer of PU film served as the encapsulation while the other was used as a dielectric layer. The resulting ultra-thin and soft PU substrate (45 μm) could be closely attached to the human skin for high-quality signal acquisition and comfortable wear.
Through four EOG electrodes around the eyes, the system could recognize nine kinds of eye movements including normal blinking, looking up/down, looking right/left, closed down/up, and up/down blinking. In addition, an intelligent algorithm was designed to train and classify these nine kinds of eye movement with high accuracy and efficiency to realize eight kinds of control using movement direction including stop, move forward/backward, move left/right, move left front/right front, and move left back/right back. The EOG module combined with the intelligent algorithm could realize machine control in a two-dimensional plane (X–Y direction). Furthermore, for HCI in 3D space, a tactile array is needed to realize control in the Z direction. Based on 16 tactile sensing units, the tactile array could realize multi-point tactile perception and sliding perception. By using the tactile array to realize the perception of different sliding trajectories and the perception of pressing at different points, complex and precise motion control can be realized.
In conclusion, the EOG module can realize easy and fast 2D interaction and the tactile module can realize accurate and complex movement control, when working together, the whole wearable system can realize fast, accurate, and convenient HCI in 3D space. On one hand, this system has important application values in the field of 3D HCI such as in unmanned aerial vehicle (UVA) control. On the other hand, this 3D HCI system can free people’s hands compared with traditional handheld VR devices, which means that this kind of system can have a wider range of applications in the metaverse. However, this research mainly focused on the control function of the wearer-centered HCI system. In the next section, we will introduce a human-like system, which realizes the voice interaction between the wearer and the robot by endowing the HCI system with listening and speaking functions.
3.3. The Machine Learning-Assisted Dual-Function Acoustic HCI System
Vocalization and hearing are important ways for people to communicate with the outside world; the ear and throat are natural “HCI systems” of humans. Due to its excellent acoustic properties, LIG has been increasingly used in the research of acoustic sensors and actuators [
35,
36,
37]. However, it is a challenge to combine the function of “hearing” and “speaking” and apply it to wearable HCI systems.
Sun et al. proposed a LIG-based dual-function transducer for human–robot interaction [
16]. As shown in
Figure 11, the whole system was composed of a LIG artificial ear based on a triboelectric sensor and a LIG artificial mouth based on a thermoacoustic effect actuator. The artificial ear and the artificial mouth were all realized by the same device structure including a PI film with single-sided LIG, a polyethylene (PET) ring spacer, and a PI film with double-sided LIG. The LIG has excellent mechanical, electrical, and thermal properties, making it suitable for multifunctional integration. Furthermore, the whole device has a low-cost advantage (~0.0036 USD) that is suitable for large-scale applications.
When used as an artificial ear, the microphone based on the triboelectric principle works in contact-separation mode. The LIG layer acts as the electrode and the triboelectric-positive material. When used as an artificial mouth, the speaker uses the thermoacoustic effect to produce sound. The system has a high sensitivity (4500 mV Pa−1) and good durability (can work for 1,000,000 cycles and 60 days). With the aid of a convolutional neural network (CNN), the system can reach 99.66% high speech recognition accuracy based on 78,360 speech data collected by the system. Most significantly, based on the high sensitivity of the device and the high performance of the algorithm, the intelligent acoustic system could identify the content, emotion, and speaker information in a sound. To test the system’s capabilities for intelligent HCI, the research team applied the wearable system to a robot called “NANO”. When wearing the intelligent acoustic HCI system, NANO can be woken up and start working when the word “nano” is heard. When two subjects greet NANO separately, NANO can use the intelligent analysis function in the HCI system to identify the meaning of their word, who said it, their emotions, and give feedback. For example, when the female subject who felt sad greeted NANO and said she wanted some music, the NANO replied to her through the voice function of the system with the correct name and played light music to improve her mood.
The presented machine learning-assisted dual-function wearable HCI system showcases a seamless integration of acoustic information recognition, intelligent analysis, and vocal feedback, enabling barrier-free communication between humans and machines. With its cost-effectiveness, the system holds great potential in revolutionizing the smart HCI interface and in restoring the communication abilities of individuals suffering from voice loss.
In the next section, on the basis of the acoustic information interaction function, we further introduce the next stage HCI system: realizing action interaction according to the control of voice instruction.
3.4. Intelligent Speech Recognition and Motion Control System
The LIG, being thin, flexible, and inexpensive, presents benefits when utilized in popular wearable and HCI systems. Based on the excellent electrical, thermal, and mechanical properties of LIG, Zhang et al. leveraged its advantages to produce cost-effective yet high-performing HCI systems, and developed an intelligent speech recognition and motion control system [
18].
Figure 12 is the functional concept map of this multifunctional and intelligent system.
The fabrication process is as follows: a LIG-based sound detector was prepared on a 25 μm PI substrate with the help of a low-power laser machine (1.3 W). The porous structure of LIG is highly sensitive to vibrations caused by sound waves, making it an ideal material for sound detection. Furthermore, because of its good flexibility and electrical properties, LIG maintains good acoustic performance when it is attached to the curved surface of the human body or robot. Due to the principle difference between the LIG-based microphone and the traditional microphone, the research team designed an intelligent speech recognition algorithm based on one-dimensional CNN to efficiently and accurately recognize the language information received by the LIG-based microphone. To train the intelligent algorithm, the research team used the LIG-based microphone to record datasets of 10 numbers (0~9) and 20 commonly used sentences. By recording each word and sentence 50 times by the male and female, the team obtained 1500 speech samples. By using an end-to-end one-dimensional CNN, the important information in speech commands can be inferred. The intelligent algorithm successfully classified the sounds gathered using the LIG microphone with 98% accuracy.
The whole system consisted of a LIG-based microphone, an analog–digital converter, a signal processing unit, and a one-dimensional CNN. Based on the intelligent algorithm-assisted speech recognition module, the system could accurately analyze the instructions of the human and control the manipulator to take the corresponding actions.
This speech recognition and motion control system can have important application values in the field of acoustic HCI systems and speech control robots. Additionally, the acoustic component of this HCI system is inexpensive, costing only a few cents, which greatly enhances its prospects.
3.5. Intelligent Artificial Throat
Most traditional sound sources and acoustic detectors are separated. However, to enhance integration and achieve a multifunctional acoustic HCI system, it is beneficial to incorporate both sound collection and generation functions into a single device.
Facing this need, Tao et al. invented a LIG-based intelligent artificial throat that could achieve functions of emitting and detecting sound by using a single LIG film, and its sound-detecting range and sound-emitting range could cover the range of human hearing [
28].
Figure 13 shows the fabrication method, function, and application scenario of the LIG-based artificial throat. The artificial throat consisted of the LIG of the PI substrate made by the laser direct writing technique (450 nm laser). When the artificial throat was used as a sound source, it worked by using the thermoacoustic effects of the graphene. By applying periodic AC voltages to it, the LIG could produce a controllable sound in a wide frequency range (100 Hz~40 kHz), covering most of the frequency range of the human voice, and had good high-frequency characteristics. Additionally, research has revealed that the thinner the LIG, the greater the sound pressure level it can produce. By working as a strain sensor, the LIG device can be used as a sound receptor. It can distinguish vocalizations, hums, coughs, etc. by detecting the laryngeal vibration and laryngeal muscle movements with high sensitivity as well as identify different words and sentences spoken by different wearers.
The LIG-based intelligent artificial throat possesses the simultaneous capability to both detect and produce sound. When worn on the throat, the artificial throat can accurately detect the muscle movement and vocal cord vibration signals of the wearer, classify the signals through the machine learning algorithm, confirm the information that the wearer wants to express, and convert it into understandable language using the sound emitting function of the artificial throat. This means that the LIG-based artificial throat holds tremendous potential for application. For example, it can assist people with voice loss to rebuild their ability to communicate by turning their inarticulate throat vibrations into coherent speech and help them reintegrate into society as typical individuals. Furthermore, it is expected to play an important role in the field of wearable HCI such as voice control based on its acoustic/mechanical detection ability, speech information conversion ability, and sound emitting ability. In the next section, a new generation of artificial throats is discussed, where a bioinspired dual-channel system will show how to further improve the ability of speech recognition and the intelligence of the artificial throat.
3.6. Bioinspired Dual-Channel Speech Recognition System
Acoustic HCI systems based on microphones are often susceptible to interference from noisy environments, resulting in poor signal quality and further affecting the accuracy of HCI.
To address this issue, Tian et al. designed a dual-channel speech recognition system using LIG that combined both EMG and mechanical signals [
25]. When an expression is about to be produced, an action potential is generated in the motor cortex, and the electrical signal is transmitted to the epidermal muscles through the neurons and stimulates muscle fibers to contract. Ion channels in the muscle are opened to release the ions, and EMG electrodes attached to the skin can convert the ion current into the electrical current to acquire the EMG signal, while the deformation of the skin caused by the muscle contraction can be picked up by mechanical sensors. Therefore, both the EMG signal and the muscle movement signal of the larynx contain speech information, and combining the two signals for speech recognition can greatly improve the accuracy of speech analysis.
Figure 14 depicts the structure of the speech recognition system, which comprises six layers. These layers include a hydrogel layer that reduces skin-electrode contact impedance and eliminates noise interference on EMG signals, a LIG-based EMG electrode, a PI separation layer that separates the EMG electrode and the mechanical sensor to prevent mutual interference, a LIG-based mechanical sensor, a PI substrate layer, and a thin-film PU tape to encapsulate and attach the system to the skin. Each patch contains a pair of EMG electrodes and two mechanical sensors that monitor one-channel EMG signals and two-channel strain signals. Furthermore, in addition to the good electrical and mechanical properties, the system had excellent durability (the performance remained good after 10 million fatigue tests). During the experiments, two patches were applied to the chin and throat to collect speech information. A recommended approach for this study is not to trace the source of EMG signals (because the epidermal EMG signals are often superimposed by many subcutaneous muscle activity signals), but to focus on the relevant features of the EMG signals and speech information.
To give the system intelligence, the research team constructed the largest dataset of isolated words, which included information on 71 words and 10 numbers, using EMG electrodes and mechanical sensors to study the connection between speech, epidermal EMG, and strain signals. A neural network was trained to recognize these signals using the dataset. The intelligent speech recognition system, through the combination of the patch and intelligent algorithm, could achieve 100% accuracy in recognizing digits and 96.86% accuracy in recognizing 71 words. Despite being in a noisy environment with 68.8 dB, the system still maintained a recognition accuracy above 95%.
The research team showcased the potential of the system in human–computer interaction (HCI) applications by using voice control to play the Snake game (the snake’s movements are controlled by speaking directions). In conclusion, the dual-channel speech recognition system is suitable for high-quality speech HCI in a noisy environment, voice reconstruction for disabled people, silent communication, and many other application scenarios. It serves as a valuable reference for the development of multifunctional and intelligent HCI systems.
In the above sections, we introduced a variety of systems with an acoustic interaction function; such systems use sound as the medium to achieve non-contact HCI. In addition, non-contact interaction using body movements is also a more direct way of HCI. Such non-contact interaction can reduce body contact and reduce the risk of disease transmission. Meanwhile, non-contact interaction can reduce the wear and tear of devices during use and increase the life of the wearable HCI system.
3.7. Humidity-Based HCI System for Health Care and Non-Contact Interaction
Currently, HCI systems based on LIG are mainly based on piezoresistive sensors, self-powered sensors, visual sensors, and acoustic sensors. While these sensors are effective in various HCI applications, they are not as reliable for monitoring respiration [
38,
39,
40,
41,
42,
43]. On the other hand, humidity sensors have a high level of reliability for respiratory monitoring, but there is limited research on HCI systems using humidity sensors.
To address this, Zou et al. proposed a humidity-based HCI system that consisted of a LIG-based humidity sensor and LIG-based acoustic device [
29]. As shown in
Figure 15, the humidity sensor and the acoustic device were made on two sides of a Nomex fire-resistive paper. The acoustic device was made of LIG obtained by laser writing directly on the surface of the Nomex fire resistive paper, while the capacitive humidity sensor was made by a two-step process. The first step was to obtain a LIG-based interdigital electrode by laser writing directly on the paper. The second step was to apply a graphene oxide (GO) solution to electrodes to form a GO film.
The flexible humidity-based HCI system can be attached to a medical mask and operates in the following manner: the humidity sensor side of the system is aimed toward the wearer for continuous monitoring of respiratory signals, and the acoustic device side of the system is the outer side to ensure the sound emitting effect. In the case of abnormal breathing patterns such as respiratory arrest or rapid breathing, the system will trigger an alarm through the acoustic device. Furthermore, the system can also achieve functions similar to the artificial throat mentioned in
Section 3.5, the difference being that the sound emitted is controlled by the wearer’s breathing rhythm and intensity. Along with these two features, this system can realize non-contact HCI functions. Based on the high sensitivity of the humidity sensor, the system can sense whether a finger is near the system by detecting the water vapor emitted by the finger. As the finger approaches, the capacitance of the sensor increases. The capacitance readings differed significantly between the wet and dry fingers.
Based on the above observation, the research team assigned the capacitance peaks from wet fingers as lines in Morse code and those from dry fingers as dots in Morse code. By approaching the system with fingers of varying levels of humidity following Morse code, a non-contact HCI was successfully implemented. Moreover, the research team realized the control of a smart car through the system. By matching different breathing rhythms with different control commands (such as rapid breathing corresponding to moving forward), the system could control the car in response to the breathing of the wearer.
In summary, this humidity-based non-contact HCI system has a wide range of applications including the detection and alerting of respiratory illnesses, an artificial throat to help aphasia patients to speak again, and controlling robots without physical contact (which is particularly valuable during pandemics) and so on. With a broad range of applications in health care and intelligent HCI, this wearable system has enormous potential for future development.
The above HCI systems focused on receiving and analyzing instructions but less on executing them. To further construct a closed-loop HCI wearable system with a complete instruction collection-instruction transmission-information processing-instruction execution (feedback) function, in the next section, a closed-loop HCI system with the motion instruction execution function will be introduced and discussed.
3.8. Soft and Stretchable Gesture HCI System
To realize a closed-loop HCI function, the wearable HCI system not only needs sensitive and multi-mode sensing ability, but also execution ability. A device that can act as both a multi-mode motion sensor and a motion actuator is highly valuable for achieving a low-cost, multi-functional, and highly efficient motion HCI system.
Wang et al. proposed LIG-based soft and stretchable electronics with a PI/PDMS substrate for multi-mode sensing and human–machine interaction [
30]. Even though the system has three main applications (voice and motion sensors, gesture recognition gloves, and remotely controlled soft robots), as illustrated in
Figure 16, all of the core components of the system were fabricated using the following method. This involved incorporating PI particles with a specific concentration into a PDMS solution, curing the mixture, and exposing the PI/PDMS substrate to an infrared laser to produce the porous LIG layer, which then resulted in the creation of the LIG-based multifunctional device. Moreover, the electromechanical properties of the device could be adjusted flexibly by adjusting the laser flux. Based on the softness and stretchability of the PI/PDMS substrate, the LIG-based wearable system could sustain a mechanical tension of over 15%, which was more suitable for wearable motion monitoring than the system with the PI substrate.
Due to its high sensitivity, good tensile properties, and good electrical performance, this sensor can effectively monitor various physiological signals such as pulse, voice, motion, etc. For motion interaction and remote-control applications, a soft glove was made by placing the PI/PDMS mixture into a glove mold, and a LIG-based sensor was fabricated by laser direct writing on each finger knuckle (including the metacarpophalangeal point, the proximal interphalangeal point, and the distal interphalangeal point). The glove could realize the accurate detection of gestures and hand movements, which is suitable for gesture HCI. Furthermore, by combining the LIG-based soft robot (which is based on the LIG-based motion actuator) with the glove, the realized motion HCI system could realize a closed-loop gesture interaction. The soft robot was driven by LIG and controlled by electric heating. Since PDMS and PI have different thermal expansion coefficients, the device can be deformed at different angles thanks to the heat generated by the LIG. The HCI system can feel the changes in human gestures through the LIG-based glove, and transmits the control signals to the thermal actuator based on LIG. The processing unit then processes the signals, enabling the deformation control of the soft robot and accomplishing remote motion control.
This study holds significant importance for the realization of robot remote control systems. The proposed multifunctional HCI system has good potential for function expansion and is expected to achieve a wide range of applications in the field of multi-purpose intelligent motion HCI.
4. Discussion and Outlook
In this review, we presented an overview of the recent advancements in LIG-based wearable systems for health care and HCI applications by using the selected sixteen examples. We discussed the design approaches, production techniques, features, capabilities, and real-world demonstrations of these systems. It can be seen that LIG, with its superior overall characteristics including excellent electrical and mechanical properties and low cost of production, can not only be utilized to create high-performance wearable single devices such as sensors and actuators, but also to create more sophisticated wearable systems. Furthermore, the trend in the development of LIG-based wearable systems in the two main application areas, health care and HCI, are becoming increasingly multifunctional and intelligent, with an aim toward integrating all the functions into a single all-in-one system.
The trend toward multifunctional development has led to an increase in the integration degree of the LIG-based wearable system for health care and HCI, allowing for more functions to be realized. The system takes on several forms such as incorporating more sensors for varied signal monitoring or adding more actuators for increased interactivity. Additionally, the system not only integrates signal collection and transformation units such as sensors and actuators, but also integrates signal processing units and transmission units, which can realize a complete functional chain of information collection–processing–transmission–interaction. It is predicted that wearable health care systems will evolve into a “portable doctor” that combines daily physiological signal monitoring, analysis, disease warning, and diagnosis functions. For HCI-oriented wearable systems, they are expected to become a self-contained HCI interface, incorporating functions such as information receipt and transmission, processing, and interaction. Furthermore, the system can be self-sufficient through the integration of energy collection and storage modules that collect energy from the wearer’s movements and sweat and store it for the use of the system. In addition to the aforementioned points, more and more innovative features will help LIG-based wearable systems play an important role in the fields of health care and HCI.
For the more intelligent development trend, as LIG-based wearable systems for health care and HCI are facing an increasing amount of information that needs to be analyzed, intelligent algorithms are needed to realize efficient and accurate data processing. For health care applications, the system can be endowed with an intelligent diagnosis function, acting like a physician. For HCI applications, the intelligent algorithm can help the system efficiently process diverse information, providing the HCI system with a “brain” and turning it into a “portable assistant”. In addition to utilizing software to bring intelligence to systems, some work is also beginning to explore hardware solutions [
44,
45,
46,
47]. These solutions include the realization of devices with integrated sensing–storage–computing ability, neuromorphic devices, in-memory computing devices, etc. In situ processing, which occurs within the system, can improve information processing efficiency, reduce data loss and power consumption, and lead to the development of self-sufficient, closed-loop wearable systems. Moreover, the multifunctional and intelligent development of the LIG-based wearable system for health care and HCI is not mutually exclusive. In fact, recent advancements show a trend toward developing wearable systems that are both multifunctional and intelligent [
48,
49,
50].
One of the development goals for the LIG-based wearable system for health care and HCI is to create an all-in-one system that meets both the demands of the user and technological advances. The ideal LIG-based wearable system for health care and HCI can be analogous to an external “information organ” of the wearer. The “information organ” is comfortable to wear, and is suitable for long-term use in daily life. It contains a variety of sensors and actuators that meets the needs of its multifunctional applications, similar to an organism, and its “nervous system” is composed of software and hardware that grants intelligence and efficient information processing. It can also obtain energy from the human body or the external environment to meet its autonomous operation needs. Additionally, it has the ability to self-repair and evolve, enhancing its functions according to the application’s demands. In summary, driven by both the market demand and technological advancements, a future LIG-based wearable system for health care and HCI applications is expected to have characteristics such as “all-in-one”, “closed-loop”, and “self-powered” to accommodate the various application needs.


 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}