
Slope Deflection Method in Nonlocal Axially Functionally Graded Tapered Beams


Abstract
:1. Introduction
2. Basic Equations
3. Applications of the Initial Values Method
3.1. A Beam Subjected to a Distributed Load
3.2. Beam Subjected to Two Different Distributed Loads
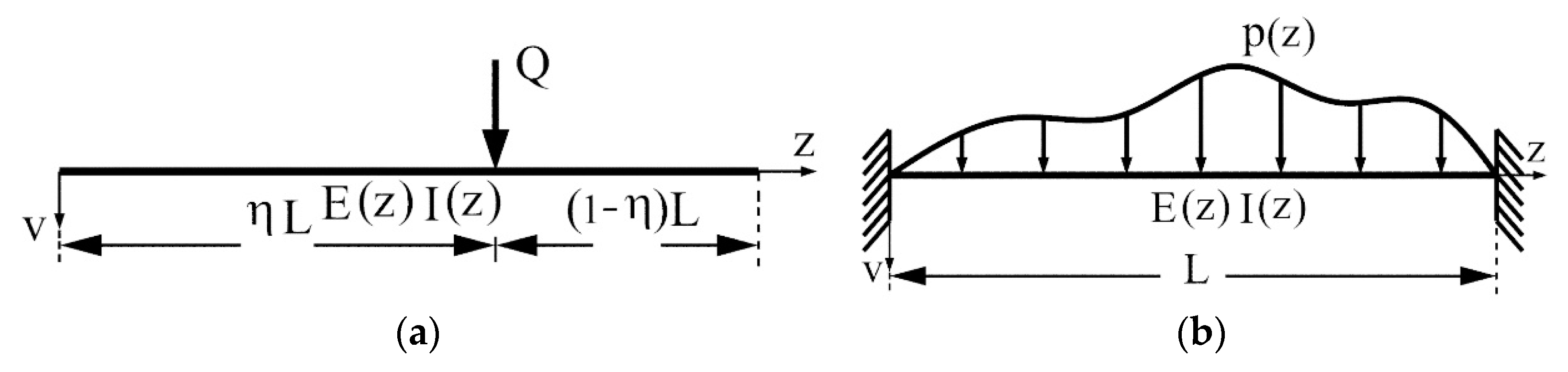
3.3. Beam Subjected to Singular Force
4. Calculation of Fixed-End Moments
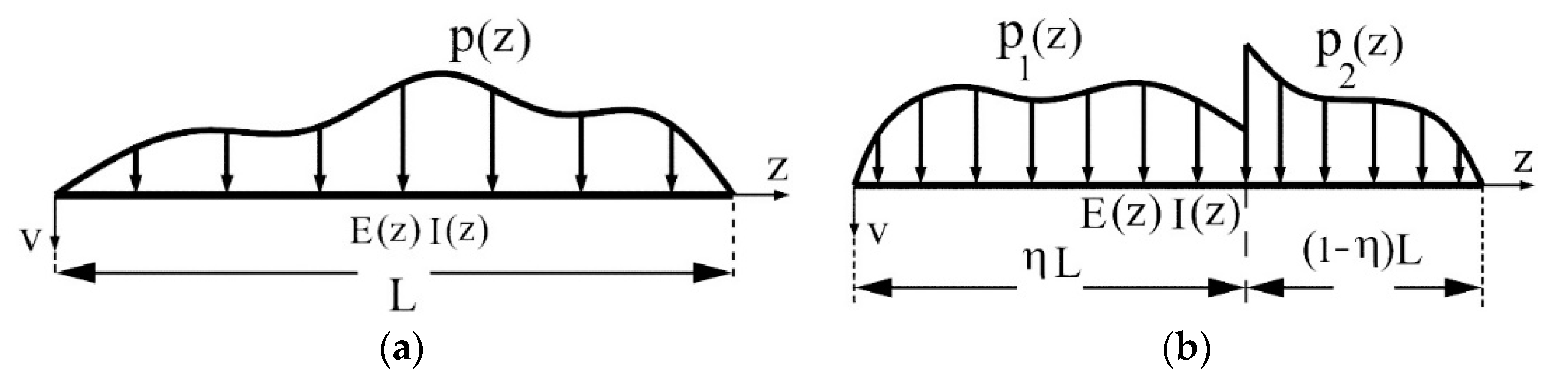
4.1. Fixed Beams with Both Ends Subjected to the Distributed Loads
- (a)
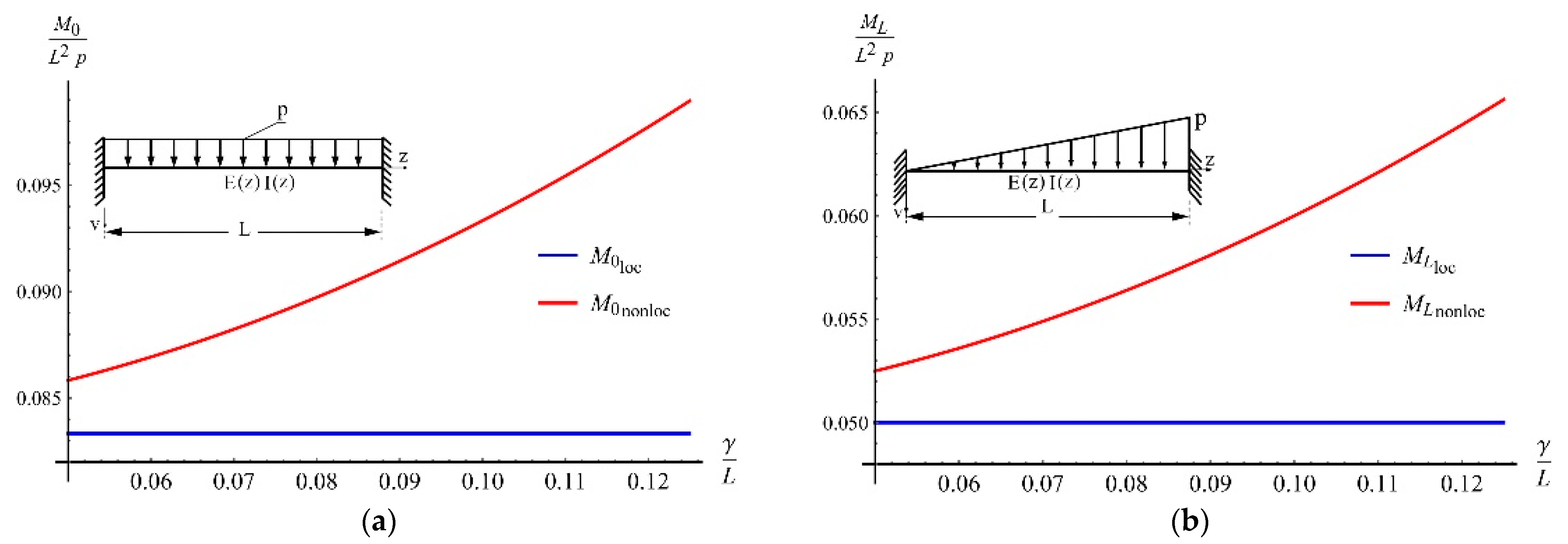
- Uniform beam with constant cross section subjected to the uniform load (see Figure 4a).In this case,Using Equations (29) and (30), the initial values M0 and T0 are found as follows.The variation of the initial moment () in classical and nonlocal theory with respect to the ratio is given in Figure 5a.
- (b)
- Uniform beam with a constant cross section subjected to the triangular load (see Figure 4b).In this case,Using Equations (29) and (30), the initial values and are found as follows.The end moments are found using Equation (8) as below.The variation of the end moment () in classical and nonlocal theory with respect to the ratio is given in Figure 5b.
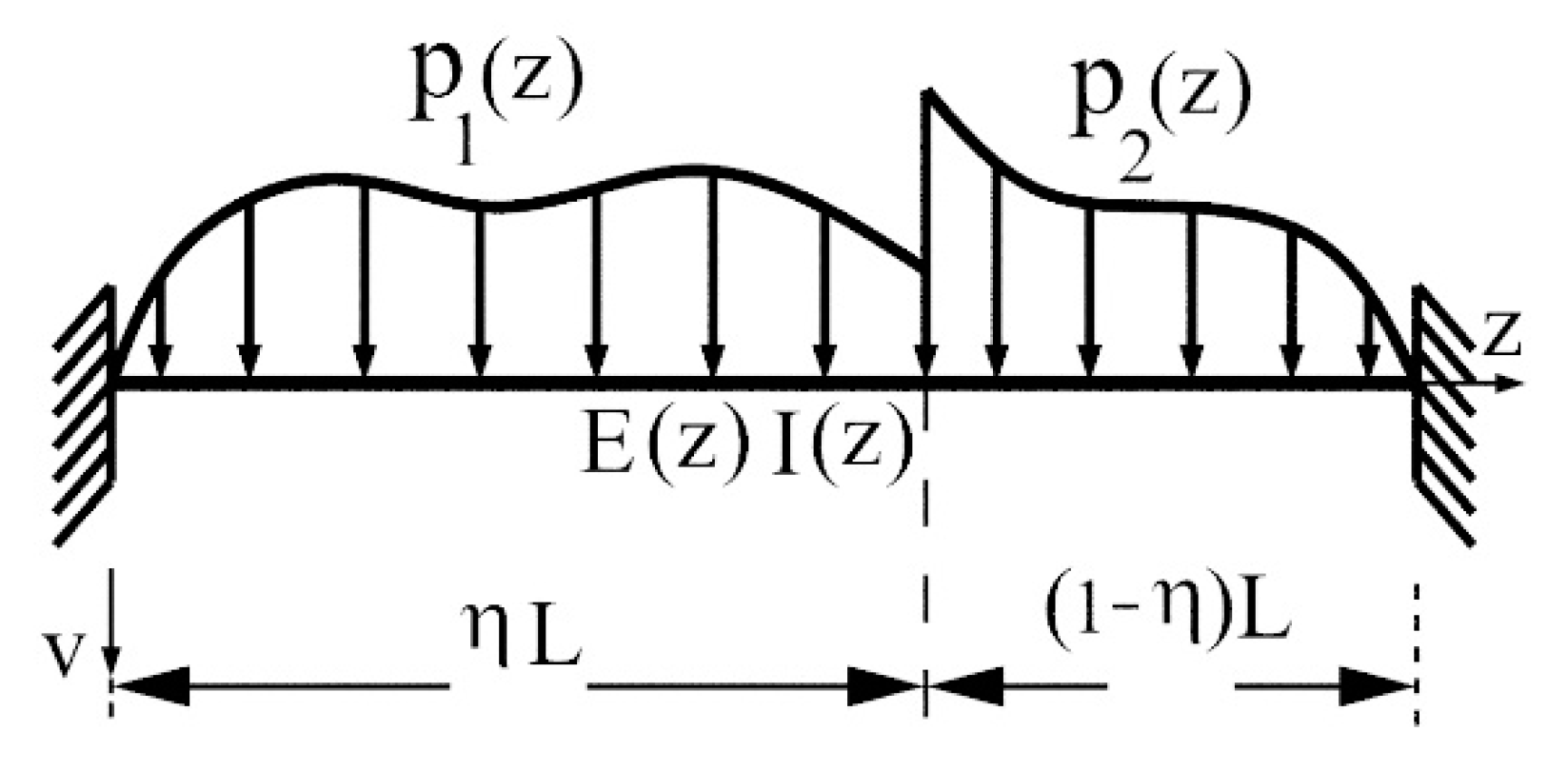
4.2. Fixed Beams with Both Ends Subjected to the Different Distributed Loads
- (a)
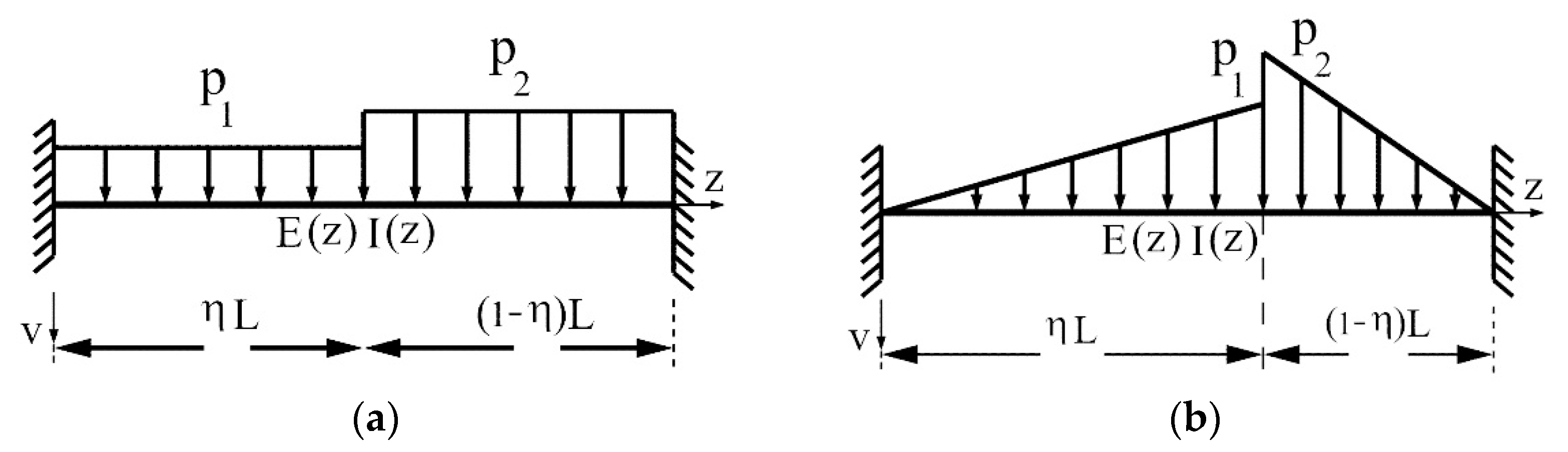
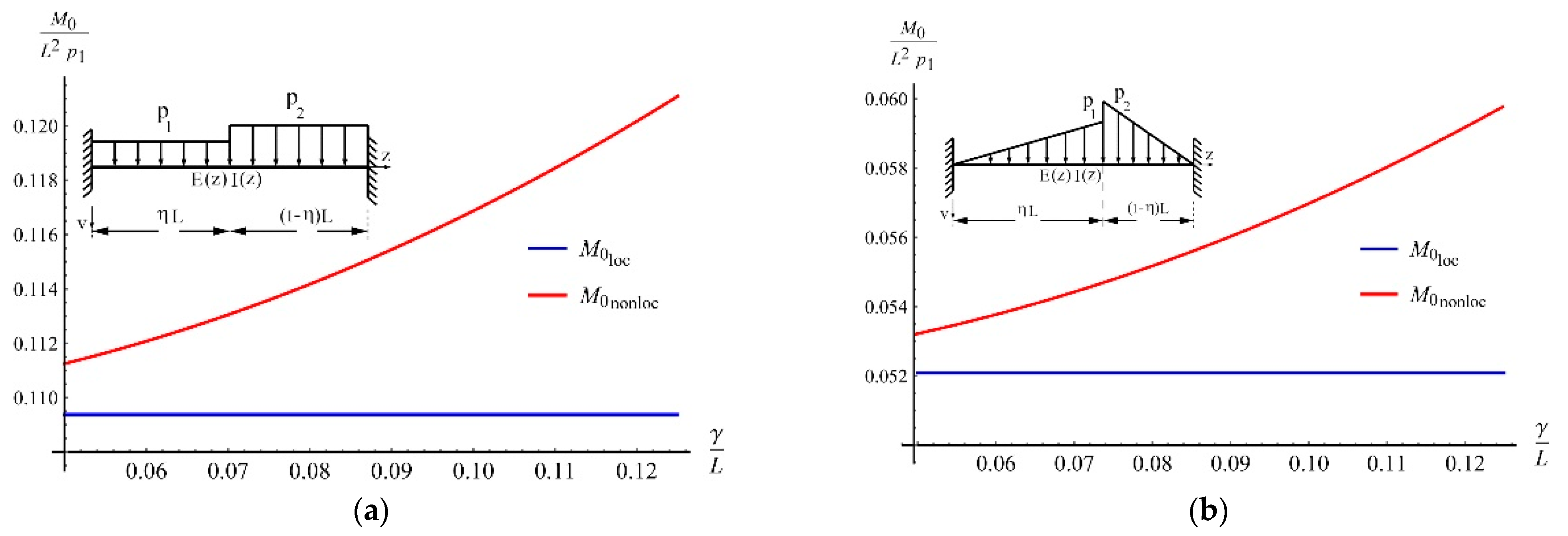
- Uniform beam with a constant cross section subjected to two different uniform loads (see Figure 7a).For andand are obtained using Equations (17) and (37) as follows.and are found using Equations (18) and (38) as below.The variation of the initial moment () in classical and nonlocal theory with respect to the ratio is given in Figure 8a.
- (b)
- Uniform beam with a constant cross section subjected to the two different triangular loads (see Figure 7b).For ,and are obtained using Equations (17) and (37) as follows.and are found using Equations (18) and (38) as below.The variation of the initial moment () in classical and nonlocal theory with respect to the ratio is given in Figure 8b.
4.3. Beams Subjected to Singular Force
4.3.1. Fixed Beam with Both Ends Subjected to Singular Forces
4.3.2. Fixed-Pinned Beams
5. Calculation of Stiffness Factors
5.1. Calculating the Moment Corresponding to the Unit Rotation for the Figure 10a
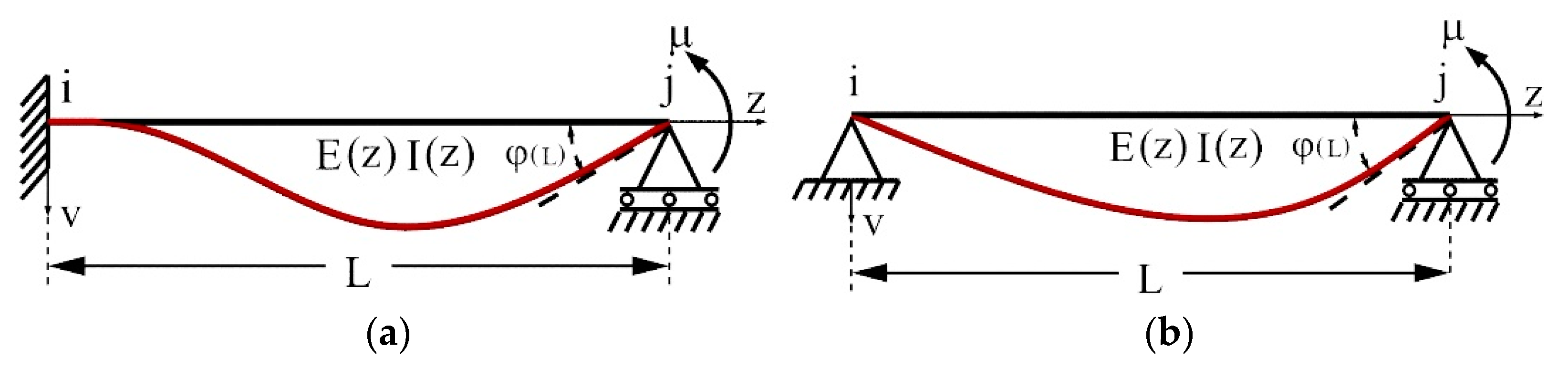
5.2. Calculating the Moment Corresponding to the Unit Rotation for the Figure 10b
5.3. Calculating the Moment Corresponding to the Unit Deflection for the Figure 11a
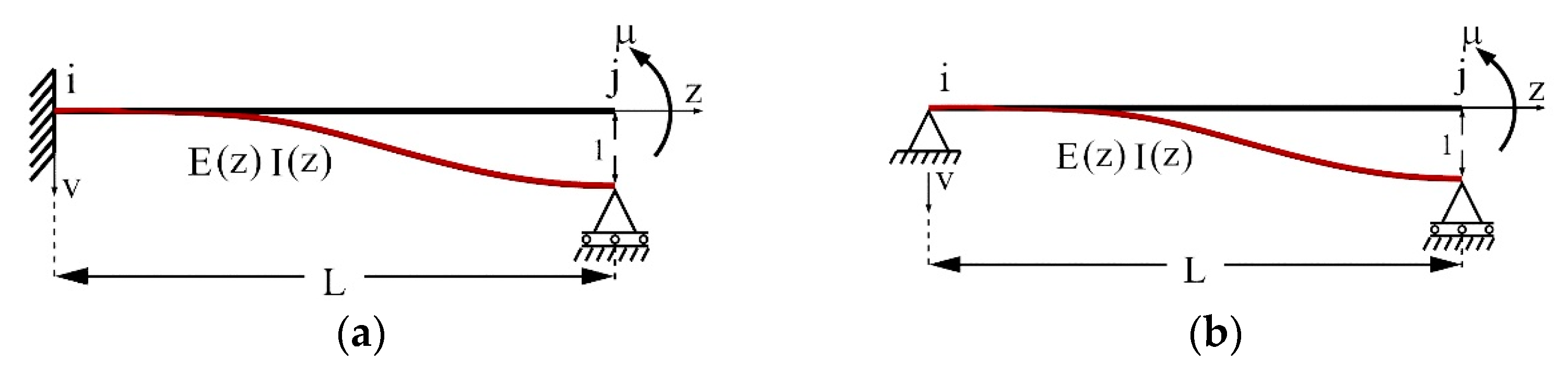
5.4. Calculating the Moment Corresponding to the Unit Deflection for the Figure 11b
6. Examples
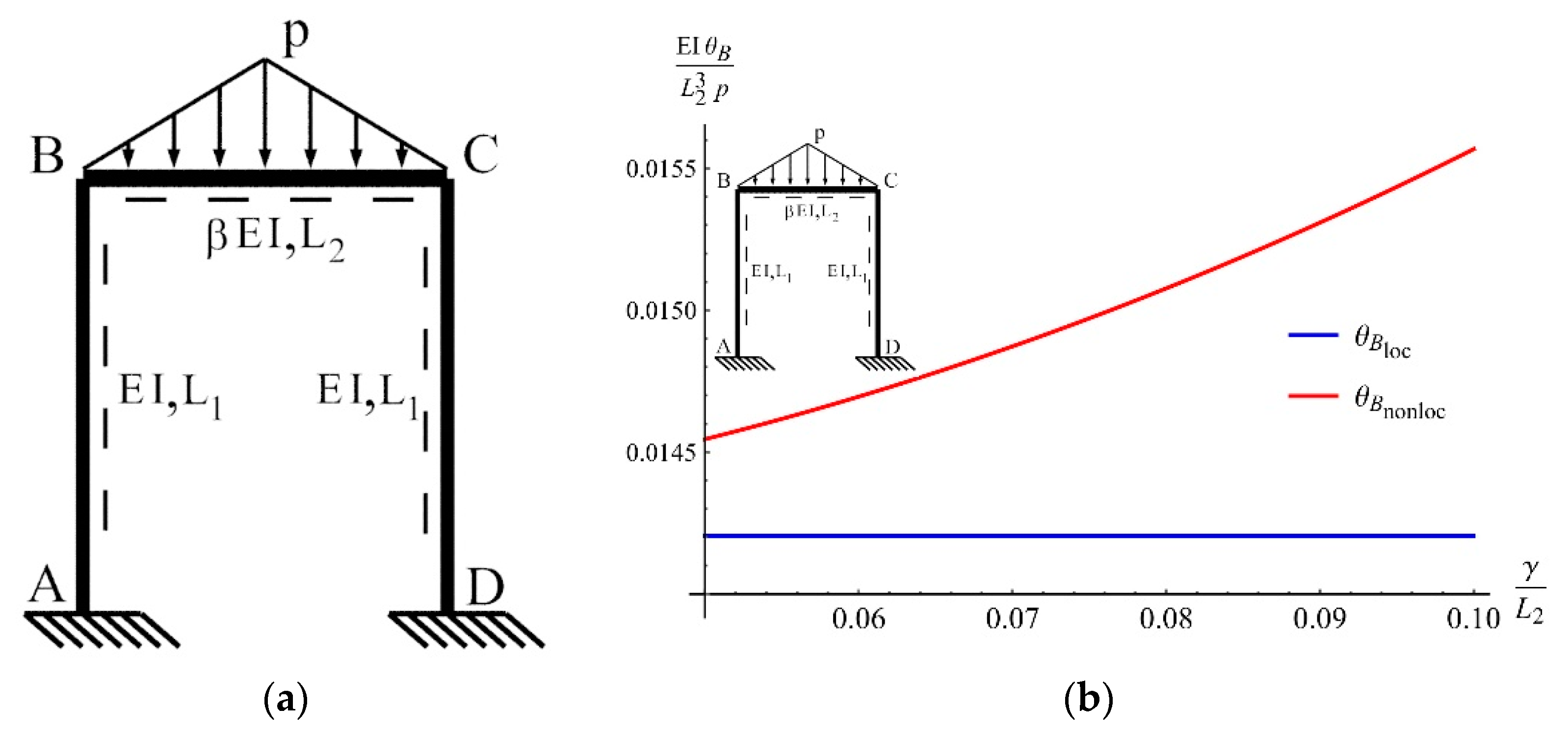
6.1. A Frame Subjected to Triangular Load
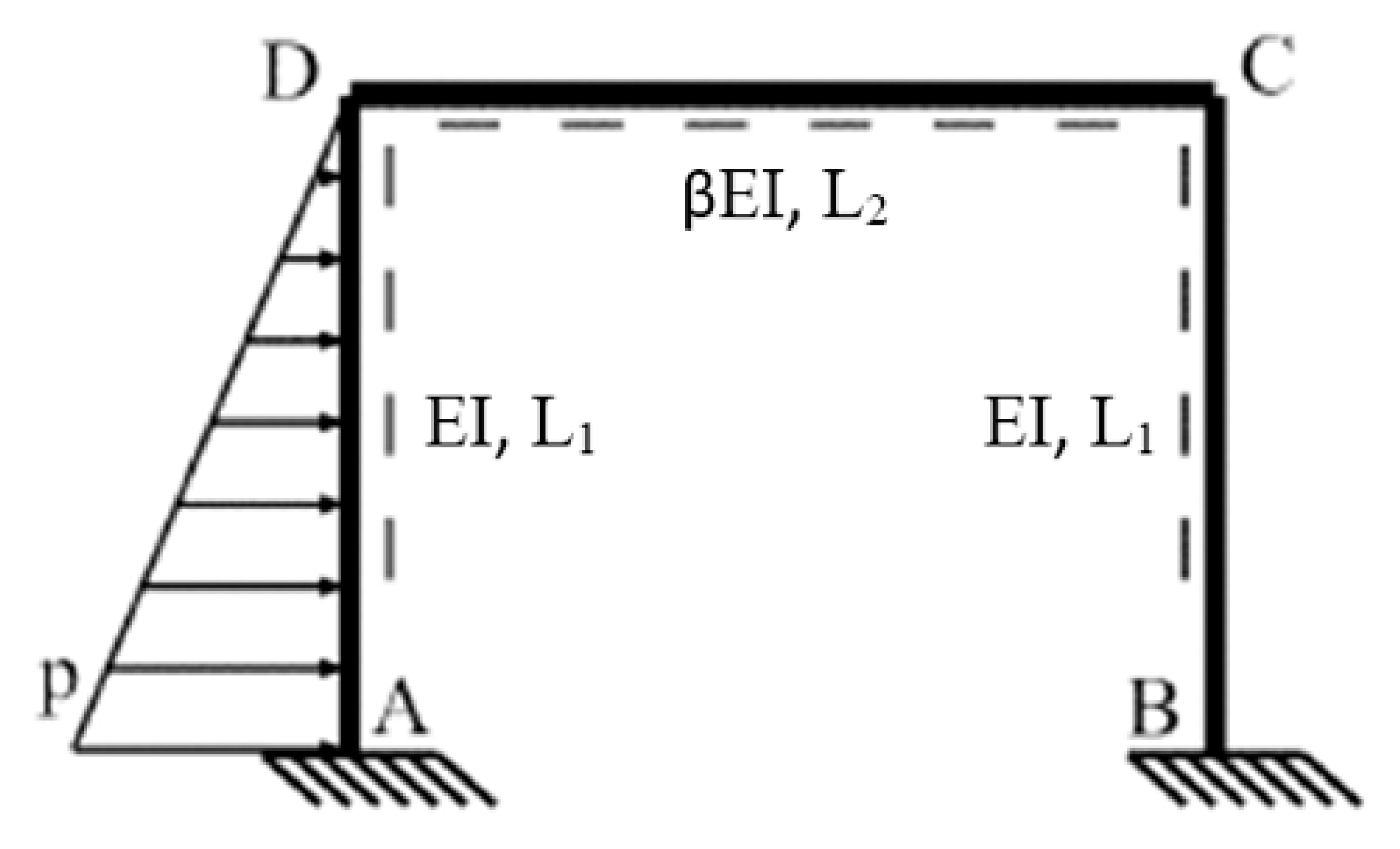
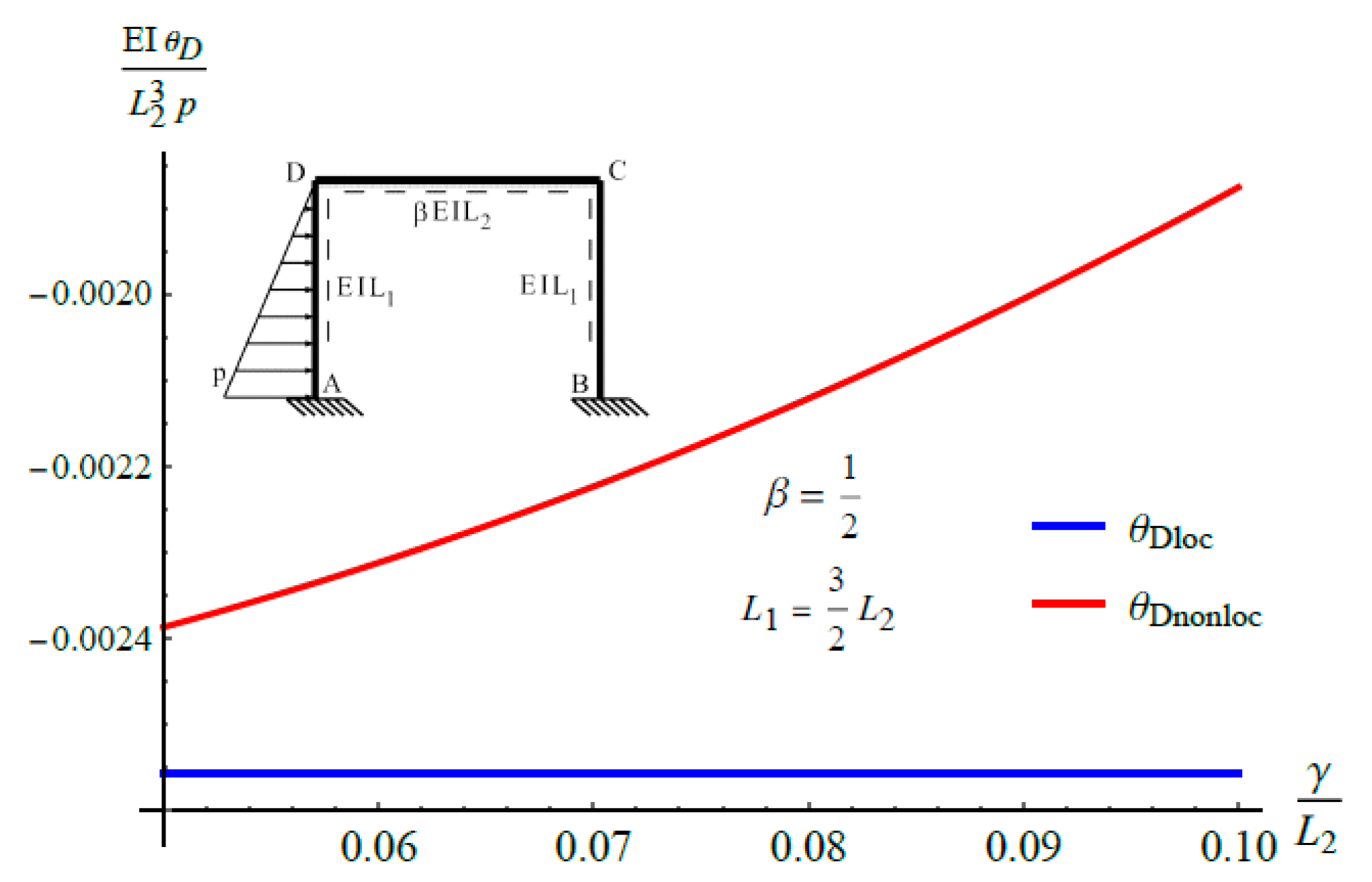
6.2. A Frame Subjected to Horizontal Triangular Load
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, J. Nonlocal Euler-Bernoulli Beam Theories, 1st ed.; Springer: Cham, Switzerland, 2021; pp. 1–7. [Google Scholar]
- Çelik, M. Mechanical Behavior of the Bi-Directional Beams. Ph.D. Thesis, Istanbul Technical University, Istanbul, Turkey, 2021. [Google Scholar]
- Demirkan, E. Investigation of Buckling Analysis Based on Nonlocal Timoshenko Rods by the Method of Initial Values. Ph.D. Thesis, Istanbul Technical University, Istanbul, Turkey, 2020. [Google Scholar]
- Demirkan, E.; Artan, R. Buckling analysis of nanobeams based on nonlocal Timoshenko beam model by the method of initial values. Int. J. Struct. Stab. Dyn. 2018, 19, 1950036. [Google Scholar] [CrossRef]
- Nejad, M.; Hadi, A.; Omidvari, A.; Rastgoo, A. Bending analysis of bi-directional functionally graded Euler-Bernoulli nano-beamsusing integral form of Eringen’s nonlocal elasticity theory. Struct. Eng. Mech. 2018, 67, 417–425. [Google Scholar]
- Husain, M.A.; Hasan, Z.H. Reduced Equations of Slope-Deflection Method in Structural Analysis. Int. J. Appl. Mech. Eng. 2021, 26, 51–62. [Google Scholar] [CrossRef]
- Kassimali, A. Structural Analysis, 8th ed.; Cengage Learning Inc.: Boston, MA, USA, 2020; pp. 20–42. [Google Scholar]
- Mau, S.T. Introduction to Structural Displacement and Force Methods, 1st ed.; Taylor and Francis Group: Boca Raton, FL, USA, 2012; pp. 197–218. [Google Scholar]
- McCormac, J.C. Structural Analysis Using Classical and Matrix Methods, 4th ed.; John Wiley and Sons Inc.: Hoboken, NJ, USA, 2012; pp. 363–388. [Google Scholar]
- Yoshida, S. Analysis of rigid frames in space by applying slope-deflection formulas. J. Fac. Eng. 1961, 12, 35–112. [Google Scholar]
- Backer, H.D.; Outtier, A.; Bogaert, P.V. Analytical calculation of internal forces in orthotropic plated bridge decks based on the slope-deflection method. J. Constr. Steel Res. 2008, 64, 1530–1539. [Google Scholar] [CrossRef]
- Aristizabal-Ochoa, J.D. Stability and Second-Order Analysis of Timoshenko Beam-Column Structures with Semi-Rigid Connections: Slope-Deflection Method. DYNA 2009, 76, 7–21. [Google Scholar] [CrossRef]
- Arshid, E.; Amir, S. Size-dependent vibration analysis of fluid-infiltrated porous curved microbeams integrated with reinforced functionally graded graphene platelets face sheets considering thickness stretching effect. Proc. Inst. Mech. Eng. Part L J. Mater. Des. Appl. 2021, 235, 1077–1099. [Google Scholar] [CrossRef]
- Mudhaffar, I.M.; Tounsi, A.; Chikh, A.; Al-Osta, M.A.; Al-Zahrani, M.M.; Al-Dulaijan, S.U. Hygro-thermo-mechanical bending behavior of advanced functionally graded ceramic metal plate resting on a viscoelastic foundation. Structures 2021, 33, 2177–2189. [Google Scholar] [CrossRef]
- Belarbi, M.O.; Garg, A.; Houari, M.S.A.; Hirane, H.; Tounsi, A.; Chalak, H.D. A three-unknown refined shear beam element model for buckling analysis of functionally graded curved sandwich beams. Eng. Comput. 2021, 38, 4273–4300. [Google Scholar] [CrossRef]
- Babaei, M.; Kiarasi, F.; Tehrani, M.S.; Hamzei, A.; Mohtarami, E.; Asemi, K. Three dimensional free vibration analysis offunctionally graded graphene reinforced composite laminated cylindrical panel. Proc. Inst. Mech. Eng. Part L J. Mater. Des. Appl. 2022, 236, 1501–1514. [Google Scholar]
- Chen, Y.; Dong, S.; Zang, Z.; Gao, M.; Zhang, J.; Ao, C.; Liu, H.; Zhang, Q. Free transverse vibrational analysis of axiallyfunctionally graded tapered beams via the variational iteration approach. J. Vib. Control 2021, 27, 1265–1280. [Google Scholar] [CrossRef]
- Karamanli, A.; Aydogdu, M. Buckling of laminated composite and sandwich beams due to axially varying in-plane loads. Compos. Struct. 2019, 210, 391–408. [Google Scholar] [CrossRef]
- Patil, H.H.; Pitchaimani, J.; Eltaher, M.A. Buckling and vibration of beams using Ritz method: Effects of axial grading of GPL and axially varying load. Mech. Adv. Mater. Struct. 2023, 30, 1–14. [Google Scholar] [CrossRef]
- Shafiei, N.; Hamisi, M.; Ghadiri, M. Vibration analysis of rotary tapered axially functionally graded Timoshenko nanobeam in thermal environment. J. Solid Mech. 2020, 12, 16–32. [Google Scholar]
- Akbaş, Ş.D. Geometrically nonlinear analysis of axially functionally graded beams by using finite element method. J. Comput. Appl. Mech. 2020, 51, 411–416. [Google Scholar]
- Wang, Y.; Ren, H.; Fu, T.; Shi, C. Hygrothermal mechanical behaviors of axially functionally graded microbeams using a refined first order shear deformation theory. Acta Astronaut 2020, 166, 306–316. [Google Scholar] [CrossRef]
- Khaniki, H.B.; Ghayesh, M.H. On the dynamics of axially functionally graded CNT strengthened deformable beams. Eur. Phys. J. Plus 2020, 135, 415. [Google Scholar] [CrossRef]
- Yee, K.; Kankanamalage, U.M.; Ghayesh, M.H.; Jiao, Y.; Hussain, S.; Amabili, M. Coupled dynamics of axially functionally graded graphene nanoplatelets-reinforced viscoelastic shear deformable beams with material and geometric imperfections. Eng. Anal. Bound. Elem. 2022, 136, 4–36. [Google Scholar] [CrossRef]
- Gantayat, A.K.; Sutar, M.K.; Mohanty, J.R. Dynamic characteristic of graphene reinforced axial functionally graded beam using finite element analysis. Mater. Today Proc. 2022, 62, 5923–5927. [Google Scholar] [CrossRef]
- Hamed, M.A.; Mohamed, S.A.; Eltaher, M.A. Buckling analysis of sandwich beam rested on elastic foundation and subjected to varying axial in-plane loads. Steel Compos. Struct. Int. J. 2020, 34, 75–89. [Google Scholar]
- Alazwari, M.A.; Mohamed, S.A.; Eltaher, M.A. Vibration analysis of laminated composite higher order beams under varying axial loads. Ocean Eng. 2022, 252, 111203. [Google Scholar] [CrossRef]
- Harsha, B.P.; Jeyaraj, P.; Lenin, B.M.C. Effect of porosity and profile axial loading on elastic buckling and free vibration of functionally graded porous beam. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Chennai, India, 31 October 2020. [Google Scholar]
- Priyanka, R.; Twinkle, C.M.; Pitchaimani, J. Stability and dynamic behavior of porous FGM beam: Influence of graded porosity, graphene platelets, and axially varying loads. Eng. Comput. 2022, 38, 4347–4366. [Google Scholar] [CrossRef]
- Huang, Y.; Li, X.F. A new approach for free vibration of axially functionally graded beams with non-uniform cross-section. J. Sound Vib. 2010, 329, 2291–2303. [Google Scholar] [CrossRef]
- Anandakumar, G.; Kim, J.H. On the modal behavior of a three-dimensional functionally graded cantilever beam: Poisson’s ratio and material sampling effects. Compos. Struct. 2010, 92, 1358–1371. [Google Scholar] [CrossRef]
- Ait Atmane, H.; Tounsi, A.; Meftah, S.A.; Belhadj, H.A. Free vibration behavior of exponential functionally graded beams with varying cross-section. J. Vib. Control 2011, 17, 311–318. [Google Scholar] [CrossRef]
- Li, X.F.; Kang, Y.A.; Wu, J.X. Exact frequency equations of free vibration of exponentially functionally graded beams. Appl. Acoust. 2013, 74, 413–420. [Google Scholar] [CrossRef]
- Koizumi, M. Use of Composites Multi-Phased and Functionally Graded Materials. Compos. Part B Eng. 1997, 28, 1–4. [Google Scholar] [CrossRef]
- Birman, V.; Byrd, L.W. Modeling and analysis of functionally graded materials and structures. ASME Appl. Mech. Rev. 2007, 60, 195–216. [Google Scholar] [CrossRef]
- Sankar, B.V. An elasticity solution for functionally graded beams. Compos. Sci. Technol. 2001, 61, 689–696. [Google Scholar] [CrossRef]
- Bhangale, R.K.; Ganesan, N. Thermoelastic buckling and vibration behavior of a functionally graded sandwich beam with constrained viscoelastic core. J. Soundand Vib. 2006, 295, 294–316. [Google Scholar] [CrossRef]
- Chakraborty, A.; Gopalakrishnan, S.; Reddy, J.N. A new beam finite element for the analysis of functionally graded materials. Int. J. Mech. Sci. 2003, 45, 519–539. [Google Scholar] [CrossRef]
- Chakraborty, A.; Gopalakrishnan, S. A spectrally formulated finite element for wave propagation analysis in functionally graded beams. Int. J. Solids Struct. 2003, 40, 2421–2448. [Google Scholar] [CrossRef]
- Kadoli, R.; Akhtar, K.; Ganesan, N. Static analysis of functionally graded beams using higher order shear deformation theory. Appl. Math. Model. 2008, 32, 2509–2525. [Google Scholar] [CrossRef]
- Li, K.V.S.G. Buckling of functionally graded and elastically restrained non-uniform columns. Compos. Part B Eng. 2009, 40, 393–403. [Google Scholar]
- Alshorbagy, A.E.; Eltaher, M.A.; Mahmoud, F.F. Free vibration characteristics of a functionally graded beam by finite element method. Appl. Math. Model. 2011, 35, 412–425. [Google Scholar] [CrossRef]
- Banerjee, J.R.; Ananthapuvirajah, A. Free vibration of functionally graded beams and frameworks using the dynamic stiffness method. J. Sound Vib. 2018, 422, 34–47. [Google Scholar] [CrossRef]
- Zhang, K.; Ge, M.H.; Zhao, C.; Deng, Z.C.; Xu, X.J. Free vibration of nonlocal Timoshenko beams made of functionally graded materials by symplectic method. Compos. Part B Eng. 2019, 156, 174–184. [Google Scholar] [CrossRef]
- Cao, D.; Gao, Y. Free vibration of non-uniform axially functionally graded beams using the asymptotic development method. Appl. Math. Mech. 2019, 40, 85–96. [Google Scholar] [CrossRef]
- Elishakoff, I.; Candan, S. Apparently first closed-form solution for vibrating: Inhomogeneous beams. Int. J. Solids Struct. 2001, 38, 3411–3441. [Google Scholar] [CrossRef]
- Çelik, M.; Artan, R. An investigation of static bending of a bi-directional strain-gradient Euler–Bernoulli nano-beams with the method of initial values. Microsyst. Technol. 2020, 26, 2921–2929. [Google Scholar] [CrossRef]
- Çelik, M.; Artan, R. Buckling Analysis of a Bi-Directional Strain-Gradient Euler–Bernoulli Nano-Beams. Int. J. Struct. Stab. Dyn. 2020, 20, 2050114. [Google Scholar] [CrossRef]
- Calim, F.F. Transient analysis of axially functionally graded Timoshenko beams with variable cross-section. Compos. Part B Eng. 2016, 98, 472–483. [Google Scholar] [CrossRef]
- Shahba, A.; Attarnejad, R.; Marvi, M.T.; Hajilar, S. Free vibration and stability analysis of axially functionally graded tapered Timoshenko beams with classical and non-classical boundary conditions. Compos. Part B Eng. 2011, 42, 801–808. [Google Scholar] [CrossRef]
- Huang, Y.; Yang, L.E.; Luo, Q.Z. Free vibration of axially functionally graded Timoshenko beams with non-uniform cross-section. Compos. Part B Eng. 2013, 45, 1493–1498. [Google Scholar] [CrossRef]
- Zhao, Y.; Huang, Y.; Guo, M. A novel approach for free vibration of axially functionally graded beams with non-uniform cross section based on Chebyshev polynomials theory. Compos. Struct. 2017, 168, 277–284. [Google Scholar] [CrossRef]
- Bambill, D.V.; Rossit, C.A.; Felix, D.H. Free vibrations of stepped axially functionally graded Timoshenko beams. Meccanica 2015, 50, 1073–1087. [Google Scholar] [CrossRef]
- Shvartsman, B.; Majak, J. Numerical method for stability analysis of functionally graded beams on elastic foundation. Appl. Math. Model. 2016, 40, 3713–3719. [Google Scholar] [CrossRef]
- Chen, X.W.; Yue, Z.Q. Contact mechanics of two elastic spheres reinforced by functionally graded materials (FGM) thin coaitngs. Eng. Anal. Bound. Elem. 2019, 109, 57–69. [Google Scholar] [CrossRef]
- Li, L.; Hu, Y. Wave propagation in fluid-conveying viscoelastic carbon nanotubes based on nonlocal strain gradient theory. Comput. Mater. Sci. 2016, 112, 282–288. [Google Scholar] [CrossRef]
- Li, L.; Hu, Y.; Ling, L. Wave propagation in viscoelastic single-walled carbon nanotubes with surface effect under magnetic field based on nonlocal strain gradient theory. Phys. E Low-Dimens. Syst. Nanostruct. 2016, 75, 118–124. [Google Scholar] [CrossRef]
- Narendar, S.; Gopalakrishnan, S. Nonlocal scale effects on wave propagation in multi-walled carbon nanotubes. Comput. Mater. Sci. 2009, 47, 526–538. [Google Scholar] [CrossRef]
- Nazemnezhad, R.; Hosseini-Hashemi, S. Nonlocal nonlinear free vibration of functionally graded nanobeams. Compos. Struct. 2014, 110, 192–199. [Google Scholar] [CrossRef]
- Rahmani, O.; Jandaghian, A.A. Buckling analysis of functionally graded nanobeams based on a nonlocal third-order shear deformation theory. Appl. Phys. A 2015, 119, 1019–1032. [Google Scholar] [CrossRef]
- Liang, Y.; Han, Q. Prediction of the nonlocal scaling parameter for graphene sheet. Eur. J. Mech. A/Solids 2014, 45, 153–160. [Google Scholar] [CrossRef]
- Peddieson, J.; Buchanan, G.R.; McNitt, R.P. Application of nonlocal continuum models to nanotechnology. Int. J. Eng. Sci. 2003, 41, 305–312. [Google Scholar] [CrossRef]
- Artan, R.; Toksöz, A. Stability analysis of gradient elastic beams by the method of initial value. Arch. Appl. Mech. 2013, 83, 1129–1144. [Google Scholar] [CrossRef]
- Hibbeler, A. Structural Analysis, 8th ed.; Pearson Prentice Hall, Pearson Education, Inc.: Upper Saddle River, NJ, USA, 2012; Volume 07458, pp. 470–484. [Google Scholar]
- Chen, W.R.; Chang, H. Closed-form solutions for free vibration frequencies of functionally graded Euler-Bernoulli beams. Mech. Compos. Mater. 2017, 53, 79–98. [Google Scholar] [CrossRef]
- Kahya, V.; Turan, M. Finite element model for vibration and buckling of functionally graded beams based on the first-order shear deformation theory. Compos. Part B Eng. 2017, 109, 108–115. [Google Scholar] [CrossRef]
- Khiem, N.T.; Tran, H.T.; Nam, D. Modal analysis of cracked continuous Timoshenko beam made of functionally graded material. Mech. Based Des. Struct. Mach. 2019, 48, 459–479. [Google Scholar] [CrossRef]
- Eringen, A.C. On differential equations of nonlocal elasticity and solutions of screw dislocation and surface waves. J. Appl. Phys. 1983, 54, 4703–4710. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Unit Displacements | [64] | |
|---|---|---|
| Unit Displacements | [64] | |
|---|---|---|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Demirkan, E.; Çelik, M.; Artan, R. Slope Deflection Method in Nonlocal Axially Functionally Graded Tapered Beams. Appl. Sci. 2023, 13, 4814. https://doi.org/10.3390/app13084814
Demirkan E, Çelik M, Artan R. Slope Deflection Method in Nonlocal Axially Functionally Graded Tapered Beams. Applied Sciences. 2023; 13(8):4814. https://doi.org/10.3390/app13084814
Chicago/Turabian StyleDemirkan, Erol, Murat Çelik, and Reha Artan. 2023. "Slope Deflection Method in Nonlocal Axially Functionally Graded Tapered Beams" Applied Sciences 13, no. 8: 4814. https://doi.org/10.3390/app13084814
APA StyleDemirkan, E., Çelik, M., & Artan, R. (2023). Slope Deflection Method in Nonlocal Axially Functionally Graded Tapered Beams. Applied Sciences, 13(8), 4814. https://doi.org/10.3390/app13084814