1. Introduction
UAVs are gaining traction as a useful tool in many different domains, including search and rescue [
1,
2], surveillance [
3], cargo transport [
4], surveying and mapping [
5,
6], disaster relief [
7], and Internet of Things (IoTs) [
8,
9]. This paper specifically focuses on the search and rescue application domain, where the challenge is to establish an on-demand UAV-based wireless network in remote areas or when existing communication infrastructure fails to operate due to natural calamity or stress on the existing network.
In network deployment, a set of UAVs is deployed within a given AOI to provide wireless connectivity to ground users for an extended period. For known user distributions, centralized network deployment algorithms are used to generate wireless mesh networks. However, deploying networks to serve users with unknown distributions is challenging. While many techniques for network deployment in unknown environments have been proposed in the literature, generalizability and real-time adaptation to uniformly and non-uniformly distributed users remain challenges. This paper aims to present an approach that is generalizable to different types of user distributions and adaptable to users’ requirements.
The deployment of a UAVs-based ad hoc network in unknown environments is usually divided into two sub-challenges. The first challenge is to find the users’ distribution. This is a relatively easier task and several geometrical-based algorithms [
10,
11] have been proposed in the literature to deploy static networks. The second challenge is to adaptively re-deploy UAVs in real-time to connect users with the command center [
12], which is an NP-hard problem. Compared to static networks, less work exists on the part of the re-configuration of networks that adapts to users’ requirements in real-time. The reconfiguration of networks is difficult due to the limited communication range between UAVs, limited battery life of UAVs, and various environmental conditions. This problem needs more attention and has many real-world applications.
This paper presents a two-phase approach to network deployment, where potential fields (PFs) govern the movement of UAVs. In the first phase, a set of potential field parameters is derived for static network deployment. For the second phase, a genetic optimization approach is presented, genetic adaptive network deployment (GANet), that optimally deploys UAVs to create an ad hoc wireless network. The problem has been formulated as an optimization problem with the aim of maximizing the sum of bandwidth coverage provided to users and the longevity of the deployed network. To provide more bandwidth coverage, UAVs move under the influence of a set of potential fields toward users in the AOI, and to increase the longevity of the deployed network, UAVs position themselves to share the bandwidth demanded by users while maintaining connectivity to the command center.
In the simulation, each UAV’s movement is controlled by a set of potential fields, where each potential field has two parameters [
13,
14], and these parameters can be tuned to achieve the desired behavior from UAVs. However, searching for parameters that optimally control the movement of UAVs to create optimal wireless networks is difficult for two reasons: (1) due to the non-linearity of potential fields and (2) because of the large search space. In the literature, it has been shown that genetic algorithms (GAs) work well with non-linear problems and problems with a large search space. Thus, a genetic algorithm has been used to evolve solutions. The potential field parameters are encoded in a real-valued chromosome and the GA searches through the space of potential field parameters. Note that other search algorithms can also be applied for searching through this space, and, in the results section, the GAs performance is compared with two other search algorithms. The network deployment problem is divided into two phases to deal with two different problems: (1) the search phase, for searching users on the ground by deploying a static network, and (2) the service phase, to reconfigure a deployed network adaptively to better serve users.
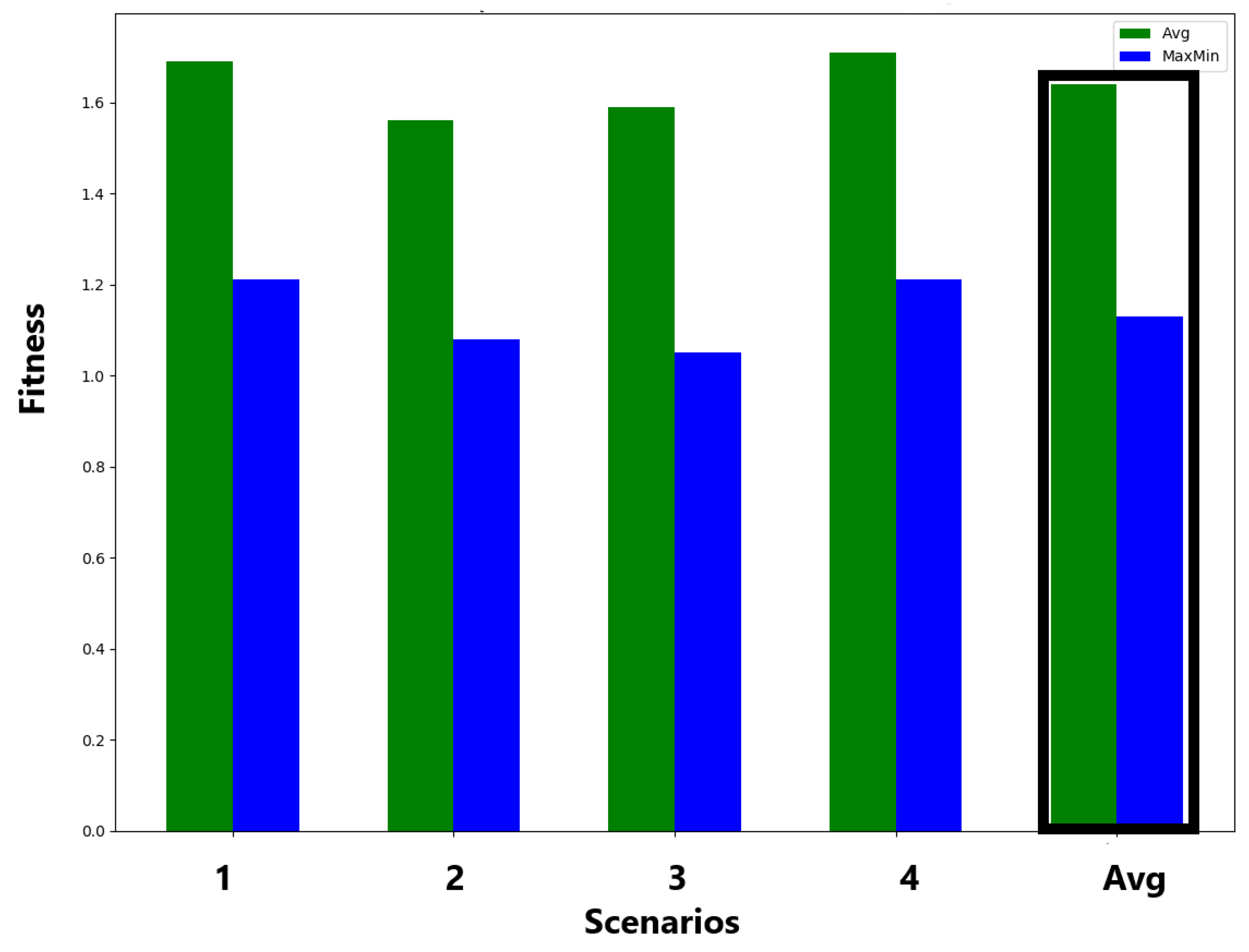
The proposed two-phase approach deploys networks in real-time and adapts to users’ requirements. However, this does not guarantee generalizability and robustness. To obtain generalizable solutions (a set of potential field parameters) that work for unknown user distributions, four different training scenarios with varying user distributions (uniform and non-uniform) were generated. The aim is to tune the potential field parameters to be distribution-agnostic and enable UAVs to better serve users. To measure the generalizability and robustness of the proposed approach, the performance of the best evolved solution was measured on 100 different test scenarios with varying user distributions. These test scenarios were designed to simulate real-world scenarios and provide a comprehensive evaluation of the approach’s performance.
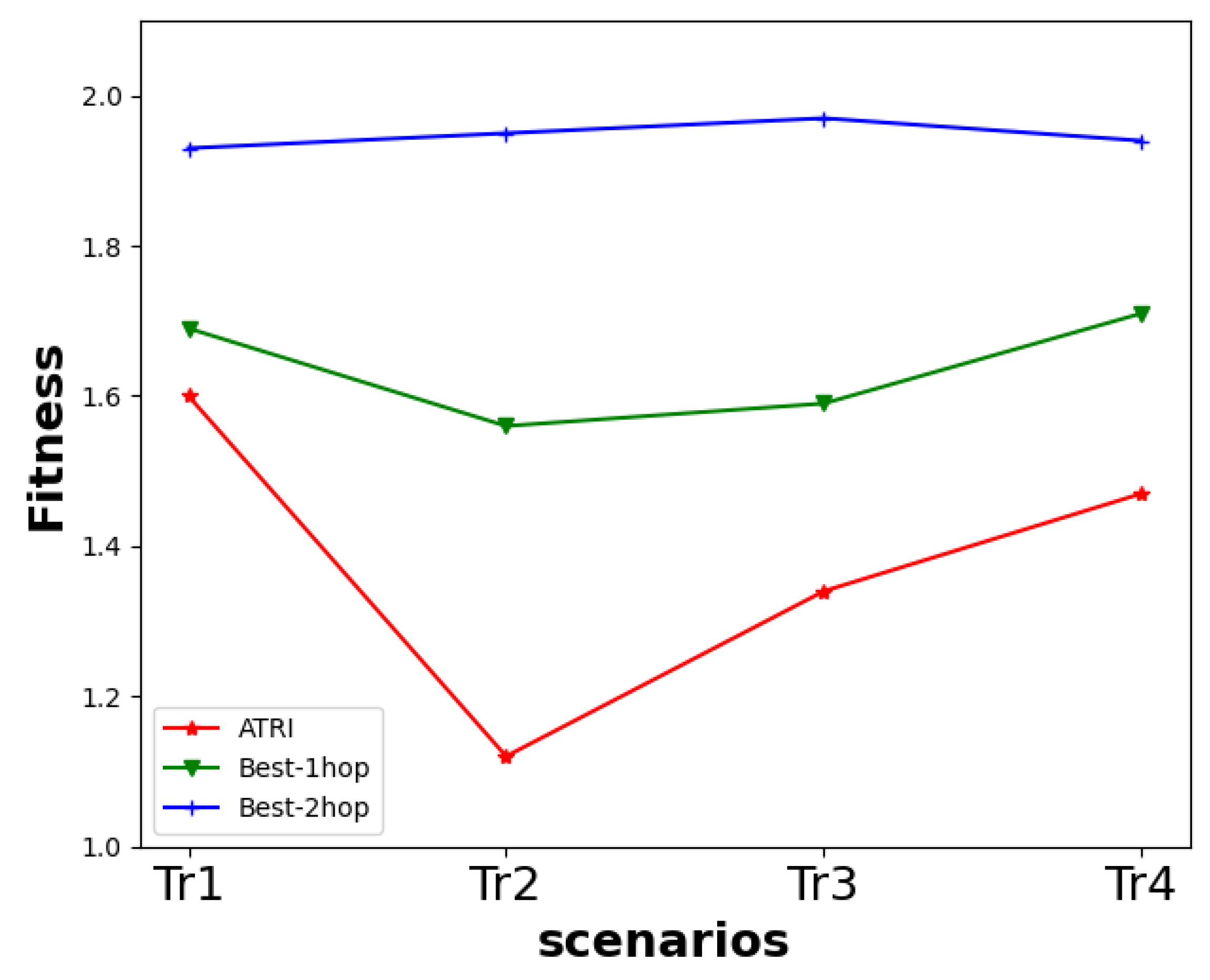
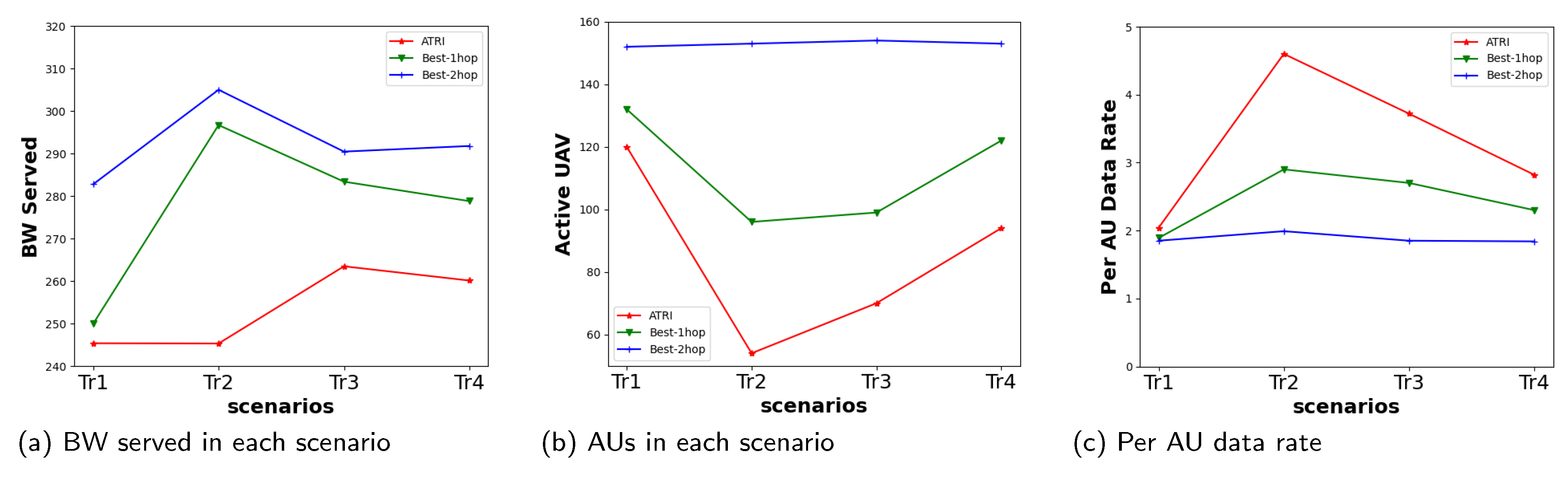
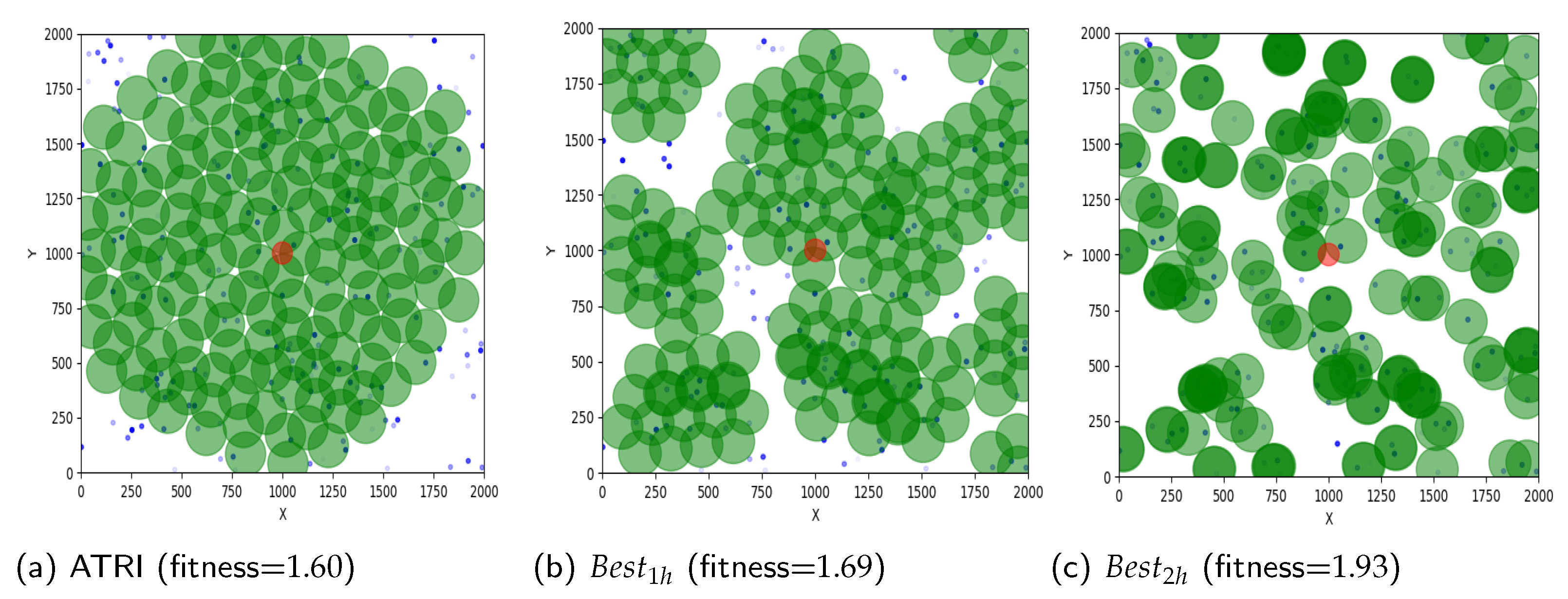
The experimental results show that the networks deployed using the best solution evolved using GANet on four training scenarios outperformed the networks deployed using the current best network deployment algorithm, adaptive triangular network deployment (ATRI) [
15], on training scenarios. More importantly, it was found that this performance advantage also holds over the never before seen 100 test scenarios. Furthermore, different levels of information exchange between UAVs have been considered to measure the differences in the performance of deployed networks. Specifically, we compared the performance of networks deployed considering one-hop (neighbor) UAV-to-UAV communication with two-hop (neighbor’s neighbors) communication. The results show that the performance of two-hop GANet is statistically significantly better than one-hop GANet and ATRI.
This work makes two significant contributions. First, we propose a unified approach that can be used for both static and dynamic network deployment. Second, our proposed approach is adaptive, generalizable, and demonstrates a superior performance compared to the current state-of-the-art network deployment algorithms when deploying dynamic networks. The remainder of this paper is organized as follows.
Section 2 describes prior work in mesh networks and potential fields-based UAVs movement.
Section 3 sets up the problem and
Section 4 describes the UAV’s movement model under the influence of potential fields.
Section 5 explains the two-phase proposed algorithm. The experimental setup and results constitute
Section 6 and the last section provides conclusions.
2. Related Work
Many challenges arise when deploying a wireless mesh network in unknown environments. Optimal UAV placement, fast deployment, maintaining a mesh network connected to a command center, minimizing the number of deployed UAVs, maximizing the lifetime of deployed networks, routing [
16], and channel allocation all present significant challenges [
12,
17]. In the literature, several techniques have been introduced for positioning UAVs based on Delaunay triangulation (DT) [
15], the circle packing theorem (CPT) [
10], and Voronoi diagrams (VDs) [
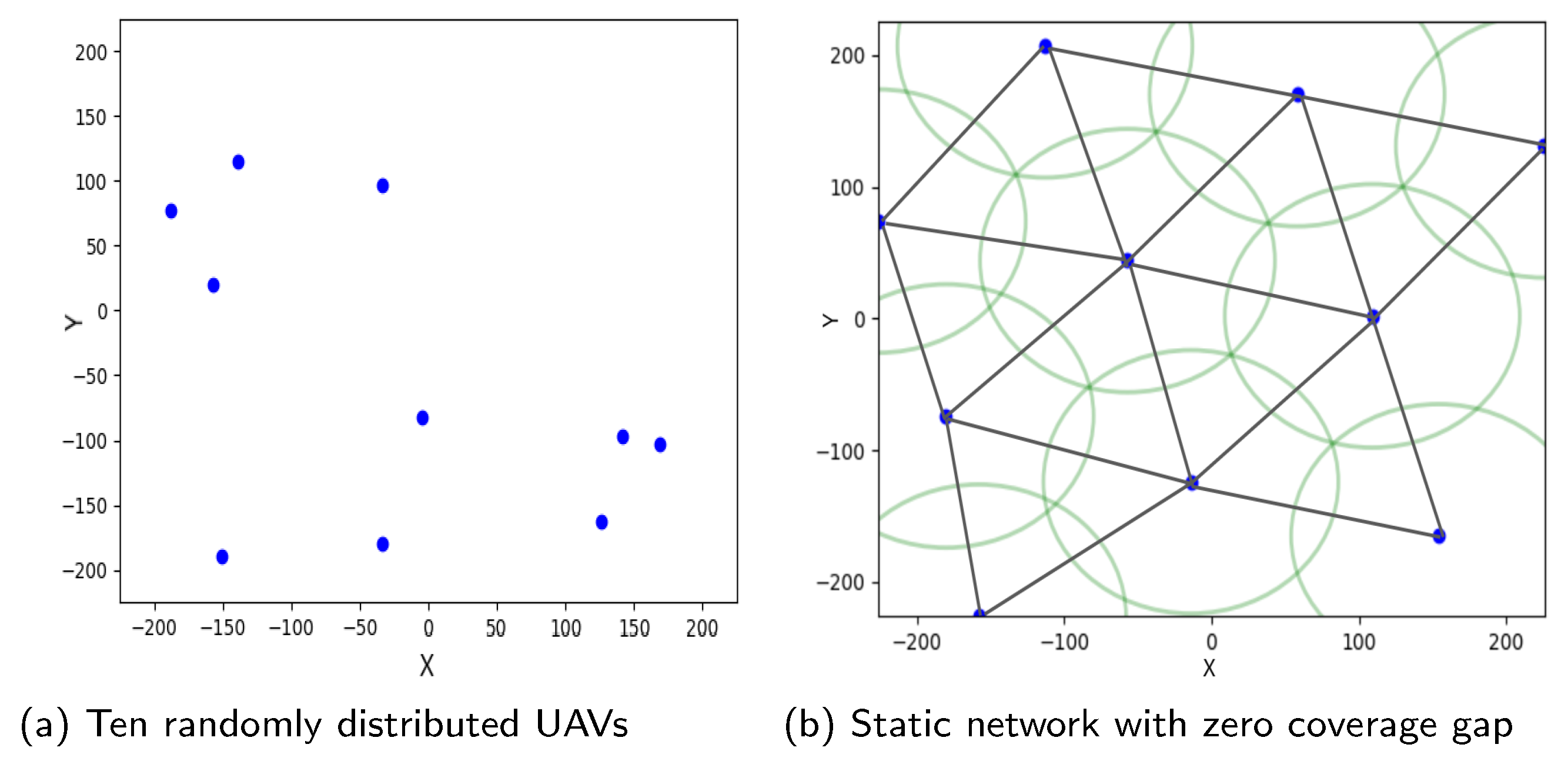
11] to create static networks. A network deployed using DT has no coverage gap while having minimum overlap between UAV’s sensing areas. CPT computes the locations of UAVs while ensuring no overlap and a minimum coverage gap. A VD divides the entire AOI into different segments and places a UAV in each segment to provide bandwidth coverage to users. Such static network deployment is primarily used for area coverage. Lam [
18] deployed a heterogeneous sensor network using circle packing by filling the given AOI with circles of different radii corresponding to different UAV types. Lyu [
19] proposed a placement optimization technique that first deploys a network using CPT and then adjusts the altitude of deployed UAVs to cover the entire AOI with fewer UAVs while providing wireless coverage to ground terminals. These are computational geometry model-based techniques used to compute the position of UAVs and they do not adapt to users’ locations or bandwidth requirements. Our proposed GANet, on the other hand, adapts to both while maximizing network longevity.
Researchers have presented modifications to make static networks more adaptive to users’ requirements. Ming [
15] introduced the state-of-the-art adaptive triangular network deployment algorithm, ATRI, by taking inspiration from Delaunay triangulation. Using one-hop neighbor’s state information, ATRI generates a mesh network by adjusting the distance between neighboring UAVs in order to better share bandwidth within a given AOI. Unlike our approach, ATRI, however, does not work well when users are distributed non-uniformly or clustered in groups. In [
20], the authors initially deployed UAVs using CPT and presented a mathematical model to adjust the altitude of deployed UAVs for near-optimal coverage. Increasing the altitude of UAVs increases the coverage range but decreases the signal strength, resulting in a poorer coverage quality. In this work, UAVs were deployed at a fixed altitude and only moved in two-dimensional space. Bartolini [
21] proposed a Voronoi polygon-based adaptive network deployment algorithm to deploy heterogeneous mobile sensors. The algorithm computes different polygons for different sensors and moves a sensor only when the sensor does not detect any users on the ground. Amar [
22] presented a dynamic algorithm to serve a sub-region within the AOI that requires more bandwidth. Both of these papers assume a uniform users’ distribution whereas this paper deals with non-uniform users’ distribution as well.
Section 5 of this paper describes how to use potential fields to deploy networks in the first phase to mimic DT and then re-deploy UAVs using a set of potential fields optimized by a genetic algorithm to maximize the bandwidth coverage and longevity during the second phase.
The potential-field-based real-time control of mobile agents was first introduced by Khatib [
23]. Owing to their simplicity, many researchers used potential fields to control UAVs and other autonomous agents in different domain-specific tasks [
14,
24,
25]. Howard [
26] used potential fields to deploy mobile sensor networks to cover an area. In their approach, an agent experienced repelling potential fields based on the distance from other agents and obstacles and moved toward unexplored areas. Poduri [
27] introduced a mobile network deployment algorithm with the constraint that each agent has at least
K neighbors, where
K is a user-defined number. Poduri’s paper provides evidence that potential fields can be used to generate a static mesh network similar to that generated by Delaunay triangulation or the circle packing theorem. Zhao [
28] presented a centralized algorithm and a potential-field-based distributed algorithm for UAV deployment while maintaining connectivity among UAVs. However, the authors considered only two different types of user distributions: uniformly random and in three clusters spread around the AOI with a command center in the middle. All of these approaches work well in a relatively uniform distribution of users but not as well when users are distributed non-uniformly.
Machine-learning-based approaches have been used for optimal UAV deployment [
29]. Genetic algorithms have been particularly popular for deploying static networks in the AOI. For example, Reina [
30] presented a multi-layout multi-subpopulation genetic algorithm that optimizes coverage, fault-tolerance, and redundancy. Dina [
31] used a variable-length genetic algorithm to optimize the area coverage and deployment cost using non-homogeneous sensors. Subash [
32] proposed a GA-based deployment algorithm that maximizes longevity by activating and deactivating sensor nodes. Ruetten [
33] developed a GA-based area optimizer that maximizes the covered area. Aziz [
34] used a hybrid of particle swarm optimization (PSO) and Voronoi diagrams to find the optimal deployment of nodes/UAVs for best coverage, and Li [
35] used the artificial bee colony (ABC) algorithm to maximize throughput. Abdulrab [
36] used the Harris hawk’s optimization (HHO) algorithm to find the optimal sensor placement for maximum coverage and connectivity. These approaches typically encode locations in chromosomes and are not generalizable.
Table 1 compares different network deployment methods based on their control mechanism, applicability toward uniform and non-uniform user distributions, and generalizability, providing readers with a clear overview of the current state of research in this field.
Unlike previous works that solely focus on UAV position optimization, this paper introduces a genetic algorithm to evolve potential field parameters that guide real-time collision-free UAV movement toward optimal positions. By fine-tuning the potential parameters, the proposed algorithm can optimally place UAVs regardless of the distribution of users and other UAVs in the area of interest. The resulting UAV network is deployed in real-time and is highly generalizable. This approach not only provides UAV positions but also ensures safe and efficient movement to these positions.
The next section presents the problem formulation, fitness computation, and an elitist genetic algorithm.
4. Potential-Field-Based UAV Movement Modeling
Potential fields have been used to guide autonomous agents [
14,
25] in complex environments and in real-time. This section briefly explains how potential fields guide UAVs. Assume that, initially,
N UAVs are placed near the center of the AOI and are hovering at 100 m altitude with zero horizontal speed (
). The maximum speed of a UAV is fixed to 15 m/s, with an acceleration of 0.1
. Assume that a UAV (
kth) can communicate with
n neighbors directly and experience an attractive (
) and repulsive (
) potential field based on the distance from each of its neighbors. The vector sum of these potential fields (
) is given by Equation (
4), which provides a heading or direction for the
kth UAV (
) to move along.
In the literature, potential fields of the form
have been used to control the movement of autonomous agents [
40], where coefficient
and exponent
are optimizable parameters that determine the field effect. In Equation (
4), both
and
can be substituted by the form of
as shown by Equation (
5).
In the above equation,
is a unit vector pointing from the
kth UAV to the
ith neighbor and vice-versa for
,
is the distance between the
kth and
ith UAVs,
are potential field coefficients, and
are potential field exponents. The genetic algorithm optimizes these coefficients and exponents to control each UAV’s movement, and
’s direction specifies the
kth UAV’s heading to move along. In our model, UAVs change their current heading to this new heading (computed using Equation (
5)) instantaneously with velocity (
) and position (
) computed using Equation (
6).
Since UAVs move under the influence of potential fields, their movement comes to a halt when the resultant field value () reaches zero or falls below a threshold value. So far, the background of the problem, the fitness criteria, training, and testing scenarios, and the UAV’s movement model have been discussed. The next section presents the proposed network deployment algorithm in two phases to deploy on-demand wireless networks.
7. Conclusions and Future Work
This paper introduces a unified approach for deploying networks using genetic algorithms optimization. Unlike prior works, the proposed approach unifies the representation across both the search and service phases of network deployment using potential fields. The proposed GANet optimizes potential field parameters that work robustly for different user distributions. In the first phase, the potential field parameters are derived, and, in the second phase, an elitist genetic algorithm optimizes another set of non-linear potential field parameters to maximize the bandwidth while increasing the network longevity.
The results indicate that GANet deployment is significantly better than the current state-of-the-art network deployment algorithm, ATRI. Additionally, the study demonstrates how different levels of information exchange between UAVs affect performance. GANet with two-hop UAV communications outperformed one-hop UAV communication. The experiments show that the offline evolved solutions are robust and work well on 100 never-before-seen test scenarios with different numbers of UAVs and users, providing evidence for the potential-fields-based approach’s robustness and generalizability. GANet adapts better when users are non-uniformly distributed and matches or exceeds ATRI’s performance with more uniform distributions.
In the future, we plan to extend this work by considering dynamic bandwidth requirements for users and maintaining coverage and bandwidth as users move towards the rescue.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}