
Dynamics and Control of Satellite Formations Invariant under the Zonal Harmonic Perturbation

School of Aerospace Engineering, Sapienza University of Rome, Via Salaria 851, 00138 Rome, Italy
Appl. Sci. 2023, 13(8), 4969; https://doi.org/10.3390/app13084969
Submission received: 22 February 2023
/
Revised: 6 April 2023
/
Accepted: 13 April 2023
/
Published: 15 April 2023
(This article belongs to the Special Issue Autonomous Formation Systems: Guidance, Dynamics and Control)
Abstract
:A satellite formation operating in low-altitude orbits is subject to perturbations associated to the higher-order harmonics of the gravitational field, which cause a degradation of the formation configurations designed based on the unperturbed model of the Hill–Clohessy–Wiltshire equations. To compensate for these effects, periodic reconfiguration maneuvers are necessary, requiring the prior allocation of a propellant mass budget and, eventually, the use of resources from the ground segment, having a non-negligible impact on the complexity and cost of the mission. Using the Hamiltonian formalism and canonical transformations, a model is developed that allows designing configurations for formation flying invariant with respect to the zonal harmonic perturbation. invariant configurations can be characterized, selecting the drift rate (or boundedness condition) and the amplitude of the oscillations, based on four parameters which can be easily converted in position and velocity components for the satellites of the formation. From this model, a guidance strategy is developed to inject a satellite approaching another spacecraft into a bounded relative trajectory about it and the optimal time for the maneuver, minimizing the total , is identified. The effectiveness of the model and of the guidance strategy is verified on some scenarios of interest for formations operating in a sun-synchronous and a medium-inclination low Earth orbit and a medium-inclination lunar orbit.
1. Introduction
In the last decade, the number of proposed formation flying missions has increased significantly [1,2,3], led by the growing number of low-cost rideshare opportunities to low Earth orbits (LEO) with medium inclination (50–55 degrees) and to sun-synchronous orbits (SSO). Satellite formations operating in these orbits are affected by perturbations associated with the non-uniform Earth gravitational field [4,5], which depend on the position of the spacecraft and therefore have a different impact on each satellite of the formation [6,7]. Satellite formations designed using the traditional approach based on the Hill–Clohessy–Wiltshire (HCW) equations show an unstable behavior over time, characterized by marked variations in the amplitude of the in-plane and out-of-plane oscillations, and by the drift of the relative orbit center [8,9]. These effects have a dramatic impact on the performance of the formation, since the relative distance between the satellites can increase and exceed the operative range or decrease down to potential collision. In such a scenario, periodic reconfiguration maneuvers are required and they can eventually involve expensive coordination activity from the ground segment [10,11,12,13,14]. An effective alternative is to identify configurations which are stable with respect to the gravitational perturbations.
Several research works address the identification of satellite formations that are invariant under gravitational perturbations, most of them considering only the effects associated with the dominant J2 term. The first work on this topic is by Schaub and Alfriend, who derived two first-order conditions to design J2-invariant relative orbits, which can be applied on a large number of practical cases [15]. Schweighart and Sedwick developed a high-fidelity linearized model which takes into account the time-averaged effect of J2 [16], Kolemen, Kasdin, and Gurfil used the Hamiltonian formalism and the variation of parameters procedure to determine configurations stable under the effects of J2 [17]. Sabatini, Izzo, and Bevilacqua identified some values of the inclination corresponding to minimum drift orbits for the J2 perturbed case [18]. He, Armellin, and Xu developed a model to design bounded relative orbits in the full zonal problem, therefore including the terms up to the desired degree, based on the Taylor approximation of Poincaré maps and numerical refinement [19]. Ma et al. examined the same problem to determine invariant relative orbits (negligible drift and variation in the amplitude of the oscillations) using double-averaged Delaunay orbital elements [20].
In this work, a model providing a compact representation of invariant relative orbits for formation flying in the full zonal problem is introduced. Using the Hamiltonian formalism, canonical transformations allow absorbing the terms associated with the perturbation [21,22] and providing a new representation of the system dynamics in terms of three mutually orthogonal couples of state variables. It is proved that the relative orbit can be characterized in terms of four parameters, corresponding to the value of four state variables at a given time, with two of them defining the boundedness condition (or equivalently the drift rate) and the other two characterizing (independently) the amplitude of the in-plane and out-of-plane oscillations.
The model proposed here can be conveniently used to design bounded satellite formations stable under the full zonal harmonic perturbation. Furthermore, it allows developing a simple guidance strategy to inject a spacecraft approaching a target satellite into a stable bounded relative orbit. The effectiveness of the model and of the guidance strategy proposed are verified by means of numerical integration, using gravity field models including harmonic coefficients with high degree and order and real ephemerides.
The results are evaluated for satellite formations operating in some scenarios of interest: a SSO with altitude of 530 km, a circular LEO with medium inclination, and a circular lunar orbit with altitude of 4300 km and inclination of 40 degrees. These scenarios have been selected as they are of interest for some formation flying missions analyzed in recent years or under development, including ones in which the author was involved. In particular, it shall be noted that, beyond the popular SSO [1], medium-inclination LEO is attracting growing interest in recent years due to the increasing number of launches, led by the development of the Starlink constellation [23], and due to their suitability for Earth observation and remote sensing applications [24,25,26]. Finally, medium-inclination lunar orbits have emerged as a viable solution for lunar navigation systems [27,28,29].
2. Hamiltonian Formalism for Formation Flying under Zonal Harmonic Perturbation
The relative motion between two spacecraft and can be conveniently described using an orthogonal reference system centered in , named the chief satellite, with axes pointing from the center of the Earth to , parallel to the angular momentum of the chief orbit, and completing the orthogonal frame. The relative position and velocity of , named the deputy satellite, with respect to are given by and .
The dynamics of the two satellites evolve under the effects of the Earth gravitational potential, which can be modeled using spherical harmonics [4]:
where μ = 3.986 × 105 km3/s2 and RE = 6378 km are, respectively, the Earth gravitational parameter and equatorial radius, is the orbit radius of the i-th spacecraft, are the Legendre associated functions of degree n and order m, and are the spherical harmonics coefficients, is the geocentric co-latitude, and is the longitude. To develop the model proposed in Section 3, Equation (1) is simplified considering only the zonal harmonic terms ().
It shall be noted that for satellite formations operating in Earth orbits, this approximation is acceptable, based on the fact that the secular perturbation associated with the zonal harmonic terms is larger by more than one order of magnitude than the periodic perturbations associated with the tesseral and sectorial harmonic ones () of the same degree [30]. Nevertheless, this is not a general case and, therefore, the model developed under this approximation is verified by means of numerical integration, discussed in Section 4, using orbital propagators which include all the harmonic coefficients.
The relative dynamics are expressed here using the Hamiltonian formalism in terms of the dimensionless state variables and :
For the sake of compactness, the derivation of the model is presented in Appendix A and the expressions of the conjugate momenta and of the Hamiltonian function H are reported below:
where
The reader will notice that the expression of is equal to that of the Hamiltonian function for the unperturbed case, while and depend on, respectively, the parameters and , collected in the coefficients and .
As detailed in Appendix A.2, the parameter is small (i.e., ). It is known that the terms of a Hamiltonian function depending on small parameters can be absorbed by a canonical change in coordinates, which preserves the form of the Hamilton Equation (3) [21]. This technique is applied in Section 3 to absorb and rearrange the Hamiltonian function as the sum of plus negligible higher order terms [31].
3. Characterization of Invariant Relative Orbits
In this section, canonical transformations are introduced to develop a model providing a compact characterization of relative orbits which are invariant with respect to the zonal harmonic perturbation, modeled using the terms up to the desired degree. The first set of canonical transformations allows absorbing the effects associated with the perturbation, resulting in a form of H equivalent to . The last transformation allows expressing the Hamiltonian function as a sum of three terms, representing the nature of the relative orbit (bounded or unbounded) and the amplitude of the in-plane and out-of-plane oscillations, respectively.
3.1. Canonical Transformations Absorbing the Zonal Harmonic Perturbation
The canonical transformations are developed to rearrange the Hamiltonian function from the form given by Equation (5) to the following one:
where represents the negligible higher-order terms associated with the zonal harmonic perturbation.
As shown by Equations (6)–(8), the dynamics onto the plane are not coupled to the one along the direction, so the canonical transformations for the in-plane () and the out-of-plane () state variables can be developed separately. The perturbation terms in the out-of-plane dynamics can be absorbed by introducing a type-3 generating function such that
Setting , introducing Equation (11) into Equations (6)–(8), and isolating the out-of-plane terms results in
The desired transformation can be found after determining the expression of such that
Equations (11)–(12) can be solved by quadrature
and Equation (13) can be integrated to produce
where is the (inessential) constant of integration. Introducing Equation (13) into Equation (11) results in the following canonical changes in coordinates:
The in-plane terms are too complex to be processed and the use of normal forms is preferred. As proved in Appendix B, using the type-3 generating function results in the following canonical change in coordinates:
where
The Hamiltonian function obtained after applying the transformations is reported below
The reader can verify that the Hamilton Equation (3) obtained using correspond to the following set of second-order ordinary differential equations:
As declared at the beginning of this section, Equation (23) is equivalent to the HCW equations except for the negligible terms .
3.2. Siegel–Moser Canonical Transformation
Examining Equation (23), it is possible to state that the system admits an equilibrium point , with one pair of real and two pairs of imaginary eigenvalues, corresponding to an equilibrium of the saddle–center–center type.
According to the Morse–Palais lemma, in the neighborhood of , the Hamiltonian function can be rearranged as the sum of three quadratic terms: one hyperbola (saddle) and two ellipses (centers). A transformation is developed here that produces the above-mentioned form, diagonalizes A, and is symplectic (i.e., is canonical) [32].
Indicating with the diagonal matrix of eigenvalues and with the matrix whose columns are the corresponding eigenvectors, the following permutation is introduced:
to obtain the Siegel–Moser form
For the transformation to be canonical, shall be transformed into a symplectic form . A matrix is introduced such that
having selected
where is a identity matrix and is the matrix corresponding to the first three rows and columns of . Finally, to verify that reality condition on the state variables , matrix shall be post-multiplied by
where , , and indicate the i-th column of .
We collect all the results of the transformations above in the following matrix:
which produces
where the value of the coefficients of can be obtained from Equation (28) and depends on that of the coefficients . From Equation (30), the reader can verify the following properties:
- the transformed variables , , , and depend only on the in-plane components , , , and ;
- the transformed variables and depend only on the out-of-plane components and ;
- the imaginary part of and is null: ;
- .
In fact, the last property implies that and , a condition that, as seen in the following section, allows the parametric characterization of relative trajectories in terms of only four parameters.
3.3. Characterization of -Invariant Relative Trajectories
The transformation produces the following form of the Hamiltonian function:
The use of Hamilton Equation (3) shows that the dynamics on the three planes are not coupled and, because the Hamiltonian function is constant (see Appendix A), the three terms of Equation (31) are also constant.
The trajectories associated with the first term, and thus associated with the saddle type of equilibrium, are hyperbolas of equations
where indicates the value of the state variables at a specific time. Equation (32) is associated with trajectories that can diverge from , converge to , or oscillate indefinitely in time in the neighborhood of . In fact, the condition characterizes relative trajectories which are stably bounded (do not drift in time) also in the presence of the zonal harmonic perturbation.
Before validating the results through numerical integration, presented in Section 4, a preliminary proof of the model consists in verifying that it produces the well-known boundedness conditions for the unperturbed case, which can be derived from the HCW equations [11]
This can be easily done by setting to zero the terms in Equation (25), applying the Siegel–Moser transformation defined in Section 3.2 and making the condition explicit:
Introducing the expressions of and from Equation (4) shows that two sets of Equations (33)–(34) are equal.
The last two terms of Equation (31) are harmonic oscillators associated with the center types of equilibrium. Recalling the properties in Section 3.2, it is possible to conclude that the amplitude of the in-plane oscillations is proportional to and, equivalently, that of the out-of-plane oscillations is proportional to [33].
It is worth summarizing here the main results obtained in Section 3:
- Applying the canonical transformations –, the dynamics equations of relative motion in the full zonal problem are converted to a form equivalent to that of the unperturbed case plus negligible second-order terms. Trajectories designed in this framework are invariant with respect to the effects of the zonal harmonic perturbation.
- A last canonical transformation produces a simplified representation of the dynamics, which can provide a compact characterization of invariant relative trajectories.
- Bounded relative trajectories evolving around (i.e., the chief satellite) are quasiperiodic orbits characterized by .
- The amplitude of the in-plane oscillations is proportional to (or equivalently ).
- The amplitude of the out-of-plane oscillations is proportional to (or equivalently ).
3.4. A Guidance Strategy for the Injection into a Bounded Orbit
The model defined in the previous section allows us to derive a simple guidance strategy to transfer a deputy satellite moving along a relative drift trajectory into a bounded orbit about the chief satellite. At a given time t, the deputy satellite is moving along a drift trajectory if and . The satellite can be transferred into a bounded orbit after introducing and such that
The conditions set by Equation (35) can be expressed in terms of relative position and velocity components and the instantaneous change in velocity required to establish the boundedness condition can be derived. First, the inverse of Equation (29) allows expressing and as a function of the instantaneous changes in and , indicated as and .
Then Equation (36) can be solved in and and the components can be determined, introducing Equation (4) in the solution.
Finally, it is possible to determine the instant in which to operate the maneuver to minimize the total . Recalling Equations (32), it is straightforward to determine that the time minimizing is
4. Numerical Study
The effectiveness of the model developed in Section 3 is verified by means of numerical integration, examining formations operating in some scenarios of interest: (a) an ELINT formation with the chief satellite in a SSO with altitude of 530 km, (b) a SAR formation with the chief satellite in a circular LEO with altitude of 530 km and inclination of 52 degrees, and (c) a formation at support of a lunar navigation system with the chief satellite on a circular lunar orbit with altitude of 4300 km and inclination of 40 degrees. Similarly, the guidance strategy is validated by applying it on a space reconnaissance satellite approaching a space object in a medium inclination LEO; the satellite is transferred into a bounded orbit about the object to be observed.
For all the cases, configurations invariant with respect to the zonal harmonic perturbation are identified in the Hamilton coordinates and are then transformed to position and velocity coordinates in by applying the inverse of canonical transformations –, considering the combinations of the zonal coefficients selected as indicated in Appendix A.2.
The initial states selected in this way are then converted to dimensional form using the following factors for distance and time (see Appendix A.3):
where and n are the chief orbit mean semimajor axis and angular velocity. The General Mission Analyisis Tool, developed by NASA’s Navigation and Ancillary Information Facility at the Jet Propulsion Laboratory, is used to propagate the initial states, using the DE405 ephemeris model [34]. The gravity field of the Earth is described by the JGM-2 model [35], including all the harmonic coefficients up to order and degree 70. For the gravity field of the Moon, the LP-165 model was used [36], including all the harmonic coefficients up to order and degree 165.
4.1. Formation in Sun-Synchronous Orbits
The stability of a satellite formation designed for SAR applications is evaluated. The orbit parameters of the chief satellite and the formation configuration, reported in Table 1 and Table 2, are selected according to the requirements for the implementation of SAR technology for the Micro-Satellite Clusters (MIRACLE)-II, a project by the European Defence Agency in which the author was involved for the mission analysis and platform design [26].
The relative orbit obtained from the integration of the initial conditions in Table 2 is represented in Figure 1, where the red line indicates the relative orbit for the first period and the black line is the complete trajectory over 30 days. The maximum and the minimum values of the three position coordinates for the first and the last orbit are reported in Table 3, showing that the amplitude of the in-plane oscillations increases by less than 0.05% and that of the out-of-plane oscillations decreases by 4%.
The results above are compared to the ones obtained from a trajectory designed based on the HCW Equation (23) having the same geometric properties. The effects of the perturbation on such a trajectory are clearly shown in Figure 2; neither the shape nor the center of rotation is preserved, as it is when using -invariant initial states. The drift along the direction is shown in Figure 3 and evolves at an almost constant rate of 11 km/day. Figure 4 shows the time evolution of the z coordinate, representing the out-of-plane oscillations, which increase by 100% over 30 days, an effect 25 times higher than the one registered for the -invariant case.
4.2. Formation in Medium-Inclination Circular LEO
In this section, the stability of a satellite formation designed to perform ELINT is investigated. The orbit parameters of the chief satellite and the formation configuration are reported in Table 4 and Table 5 and result in the relative trajectory shown in Figure 5.
As for the case in Section 4.1, the variations in the extreme values of the position coordinates for the first and the last orbit, collected in Table 6, are compared. The results indicate that both the in-plane and the out-of-plane oscillations decrease by a marginal 1.2% and 2.7%.
The use of initial conditions determined based on the unperturbed model results in the trajectory represented in Figure 6, characterized by a high drift rate along the direction and rapid increase in the amplitude of the oscillations, which can be observed in detail in Figure 7 and Figure 8.
To further evaluate the effectiveness of the method developed in this research, relative trajectories computed from -invariant initial states can be compared to the ones obtained integrating -invariant initial states derived from the method proposed by Schaub and Alfriend, which is known to be effective especially for non-polar orbits. The orbit parameters of the chief satellite and the -invariant initial state of the deputy satellite are the ones indicated in [15] and reported in Table 7 and Table 8.
The -invariant initial state is reported in Table 9. It shall be noted that the model proposed here is developed for satellites operating along orbits with null or negligible eccentricity (see Appendix A.1); therefore, its application on an elliptic orbit, like the one in Table 7, shall be carefully evaluated. Because the error introduced in Equations (A1)–(A5) for is of the order of [37], an attempt was made to proceed further. The effectiveness of this approach can be verified from the results reported below, obtained by means of numerical integration.
The relative trajectories obtained integrating the two different initial states reported in Table 8 and Table 9 are computed as for the previous cases and represented in Figure 9. In particular, the figure represents the evolution of the two trajectories over 3 days from the initial epoch, showing that even in a short time, the use of -invariant initial states can improve the boundedness condition established by selecting -invariant initial states. The effect is particularly evident on the y component, whose time behavior is shown in Figure 10.
4.3. Formation in Medium-Inclination Lunar Orbit
The effectiveness of the model is evaluated in the extremely perturbed lunar gravitational field [38], examining the stability of a formation designed for the purpose of lunar navigation [39,40], with parameters indicated in Table 10 and the -invariant initial state reported in Table 11. The relative trajectory is shown in Figure 11 and it can be compared to the one obtained from a non-invariant initial state, shown in Figure 12. Table 12 collects the extreme values for the position coordinates during the first and the last orbit, corresponding to a negligible increase in the amplitude of both the in-plane and the out-of-plane oscillations of 0.48% and 0.16%. As highlighted by Figure 13, the use of -invariant initial conditions ensures the stability of the boundedness condition, mitigating the drift, which is reduced to a negligible value.
4.4. Injection into a Relative Bounded Trajectory
The guidance strategy proposed in Section 3.4 is implemented here to inject a reconnaissance satellite into an invariant bounded trajectory about the target object , characterized by the orbit parameters reported in Table 13 and Table 14. Data in these tables allow determining the relative position and velocity of in at the initial epoch and, consequently, the corresponding state in Hamiltonian variables, collected in Table 15.
Developing the transformation , it can be verified that the coefficients of matrix for the case examined here are , , and ; then, applying Equation (37) with and in Table 15 provides m/s and m/s. According to Equation (39), such a provided at the initial time is the minimum one; the state resulting from the maneuver is reported in Table 16 and the complete trajectory is shown in Figure 14. It is worth emphasizing here that the transfer of a spacecraft into a bounded relative trajectory only requires an in-plane change in velocity. Figure 15 shows details of the injection point in which an arrow indicates the direction of the provided, which lies on the plane. As expected from the theory, a change in the in-plane velocity components does not affect the out-of-plane dynamics. In fact, the values of and in Table 15 are the same as in Table 16, and the amplitude of the z component does not vary after the maneuver, as shown in Figure 16.
5. Conclusions
This research introduces a novel model which provides a compact representation of relative trajectories invariant under the zonal harmonic perturbation. This solution is developed using the Hamiltonian formalism where canonical transformations allow reducing the dynamics of the perturbed problem to a form equivalent to that of the unperturbed one, without requiring any truncation of the zonal harmonic coefficients. In the transformed coordinates, formation configurations with the desired drift behavior and amplitude of the oscillations can be designed based only on four parameters that can be rapidly converted to the corresponding relative position and velocity coordinates; a few algebraic operations are enough to determine -invariant relative trajectories, and the model does not require any further numerical refinement.
The accuracy of the solution is evaluated through numerical integration, using high-fidelity orbit propagators (JGM-2, LP-165, DE405) on initial states generated by the model for some scenarios of interest: Earth SSO, medium-inclination LEO, and a medium-inclination lunar orbit. The results of the analysis indicate that the parameters of the relative trajectory are stable, with the amplitude of the oscillations varying by less than 4% of their initial value over 30 days and the drift being negligible.
Based on the geometric properties of the transformed Hamiltonian system, a guidance strategy is developed to inject a spacecraft into a stable bounded relative trajectory about another orbiting object nearby. Furthermore, this strategy is verified numerically, proving its effectiveness in establishing the transfer between relative trajectories once provided the indicated by the theoretical analysis.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
All data are reported in the manuscript.
Conflicts of Interest
The author declares no conflict of interest.
Appendix A. Derivation of the Hamiltonian Formalism
In this appendix the Hamiltonian formalism describing the relative motion of satellites in close proximity is developed after deriving the expression for the Lagrangian of the problem. The model is developed under the hypothesis that the satellites of the formation evolve along orbits that are circular or slightly elliptical.
Appendix A.1. Lagrangian for the Relative Motion under the Zonal Harmonic Perturbation
The reader shall recall from Section 2 that the relative coordinates of the deputy satellite with respect to the chief are expressed in the reference frame , using the symbol to indicate the relative position. rotates with respect to an Earth-centered inertial (ECI) frame with an angular velocity depending on both the orbit angular speed n of the chief satellite and that of its orbit plane caused by the gravitational perturbations. The expression of is here developed considering only the secular effect of on the rotation of the orbit plane, which causes the time drift in the RAAN and in the argument of latitude expressed below:
with
where is the mean radius of the -perturbed orbit, is the semi-major axis, and i is the inclination of the orbital plane. Based on Equations (A1)–(A5), the expression of is given by
Equation (A6) is now used to derive the expression for the relative velocity in the inertial frame, reported below, and that of the relative kinetic energy .
For the sake of compactness, it is worth isolating from Equation (A7) the terms , used in Equation (4), depending on the perturbation (i.e., on ).
where
and
Finally, the relative kinetic energy can be expressed in compact form based on Equations (A8)–(A10):
Once the expression of is derived, an equivalent representation of the relative potential is necessary to obtain the Lagrangian. As suggested by Kolemen et al. [17], the expression of , including the zonal harmonic coefficient, can be obtained after expressing Equation (2) for and in and then subtracting the two, resulting in the following form:
The geocentric co-latitude can be obtained from the projection of along the axis of the ECI frame, expressed through the 3-1-3 rotation :
The expression of can be approximated using the Legendre polynomials
As detailed in Appendix A.2, because , Equation (A16) can be truncated to the second order in , obtaining
and
Finally, introducing Equations (A17)–(A18) into Equation (A12) and subtracting to results in the following expression for the Lagrangian of the problem:
with
where and collects the terms depending on the coefficients, which shall be selected as detailed in the following section. The term of the Lagrangian corresponds to the one for the unperturbed problem and the HCW equations can be derived applying the Euler–Lagrange equation .
Appendix A.2. Scale Analysis
The expression of derived in the previous section includes the Legendre polynomials up to order , based on the hypothesis that . In fact, when examining the problem under the zonal harmonic perturbation, values of interest for are those corresponding to LEO altitudes km, while values of the relative distances are typically in the range km. Consequently, for the truncation error is always lower than , an acceptable value which substantiates the approximation. Equivalent results can be obtained considering low lunar orbits.
A similar analysis is extended to the zonal harmonic coefficients to identify the ones to include in the model for providing adequately accurate results. It shall be observed that ; thus, all the combinations of zonal harmonic coefficients in this range shall be taken into account in the analysis. According to the JGM-2 Earth gravity model [35], the following coefficients were considered for the analysis in Section 4.1, Section 4.2, and Section 4.4: and .
Similarly for the Moon, , so all the combinations of zonal harmonic coefficients in this range shall be considered and, according to the LP-165 Moon gravity model [36], the following coefficients were included in the analysis in Section 4.3: –, –, , –, , –, –.
Appendix A.3. Hamiltonian Formalism
The Hamiltonian formalism allows representing the relative dynamics of satellites in close proximity in terms of the Hamiltonian variables and , explained by Equations (4). The Hamiltonian function is obtained by applying the Legendre transformation to the Lagrangian
leading to
where
where, as for Equation (A21), the terms depending on the zonal harmonic coefficients are collected in .
To improve the numerical processing, Equations (A23)–(A25) are converted to a dimensionless form
where and are the units of distance and time.
Finally, considering the results of the scale analysis in Appendix A.2, the expression of can be rearranged as the sum of two terms, and , collecting, respectively, the zonal coefficients and . The complete expression of H in dimensionless form is given by Equations (5)–(8), where the hat sign was discarded to ease the notation.
Appendix B. Canonical Transformation Absorbing the In-Plane Zonal Harmonic Terms
It is shown in Section 3.1 that the in-plane and out-of-plane dynamics are not coupled and can be analyzed separately. Indicating as the in-plane terms of the Hamiltonian function, the ones depending on the perturbation coefficients of order one () can be absorbed by means of a canonical transformation defined through a type-3 generating function such that
and
Introducing Equations (A29) into results in the following expression:
Finally, to obtain the desired form for , the following identities must be verified:
The solutions of the system are given by Equation (21), which provides a complete definition of the generating function and, therefore, of the canonical transformation.
References
- Bandyopadhyay, S.; Subramanian, G.P.; Foust, R.; Morgan, D.; Chung, S.J.; Hadaegh, F.Y. A Review of Impending Small Satellite Formation Flying Missions. In Proceedings of the 53rd AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 5–9 January 2015; Volume 53, pp. 567–578. [Google Scholar] [CrossRef] [Green Version]
- Chung, S.J.; Bandyopadhyay, S.; Foust, R.; Subramanian, G.P. Review of Formation Flying and Constellation Missions Using Nanosatellites. J. Spacecr. Rocket. 2016, 53, 567–578. [Google Scholar] [CrossRef] [Green Version]
- ESA Space Debris Office. ESA’S Annual Space Environment Report; ESA Space Debris Office: Darmstadt, Germany, 2022. [Google Scholar]
- Vinti, J.P. Zonal Harmonic Perturbations of an Accurate Reference Orbit of an Artificial Satellite. J. Res. Natl. Bur. Stand. Math. Math. Phys. 1963, 67B, 191–222. [Google Scholar] [CrossRef]
- Wnuk, E. Second order perturbations due to the gravity potential of a planet. In From Newton to Chaos; Roy, A.E., Stevens, B.A., Eds.; Plenum Press: New York, NY, USA, 1995; pp. 259–260. [Google Scholar]
- Djojodihardjo, H. Influence of the Earth’s Dominant Oblateness Parameter on the Low Formation Orbits of Micro-Satellites. Int. J. Automot. Mech. Eng. 2014, 9, 1802–1819. [Google Scholar] [CrossRef]
- Wu, B.; Wang, D.; Poh, E.K. Dynamic Models of Satellite Relative Motion Around an Oblate Earth. In Satellite Formation Flying. Intelligent Systems, Control and Automation: Science and Engineering; Springer: Singapore, 2016; Volume 87, pp. 9–41. [Google Scholar] [CrossRef]
- Prussing, J.A.; Conway, B.A. Orbital Mechanics; Oxford University Press: New York, NY, USA, 1993; pp. 139–152. [Google Scholar]
- Burnett, E.R.; Schaub, H. Study of highly perturbed spacecraft formation dynamics via approximation. Adv. Space Res. 2021, 67, 3381–3395. [Google Scholar] [CrossRef]
- Izzo, D.; Sabatini, M.; Palmerini, G. Minimum control for spacecraft formations in a J2 perturbed environment. Celest. Mech. Dyn. Astron. 2009, 105, 141–157. [Google Scholar] [CrossRef]
- Bando, M.; Ichikawa, A. In-Plane Motion Control of Hill–Clohessy–Wiltshire Equations by Single Input. J. Guid. Control. Dyn. 2013, 36, 1512–1521. [Google Scholar] [CrossRef]
- Agarwal, S.; Sinha, A. Formation Control of Spacecraft under orbital perturbation. IFAC—PapersOnLine 2016, 49, 130–135. [Google Scholar] [CrossRef]
- Armellin, R. Collision avoidance maneuver optimization with a multiple-impulse convex formulation. Acta Astronaut. 2021, 186, 347–362. [Google Scholar] [CrossRef]
- Andrievsky, B.; Popov, A.M.; Kostin, I.; Fadeeva, J. Modeling and Control of Satellite Formations: A Survey. Automation 2022, 3, 511–544. [Google Scholar] [CrossRef]
- Schaub, H.; Alfriend, K. J2 Invariant Relative Orbits for Spacecraft Formations. Celest. Mech. Dyn. Astron. 2001, 79, 77–95. [Google Scholar] [CrossRef]
- Schweighart, S.A.; Sedwick, R.J. High-Fidelity Linearized J2 Model for Satellite Formation Flight. J. Guid. Control. Dyn. 2002, 25, 1073–1091. [Google Scholar] [CrossRef]
- Kolemen, E.; Kasdin, N.J.; Gurfil, P. Hamilton-Jacobi modelling of relative motion for formation flying. Ann. N. Y. Acad. Sci. 2005, 1065, 93–111. [Google Scholar] [CrossRef] [PubMed]
- Sabatini, M.; Izzo, D.; Bevilacqua, R. Special Inclinations Allowing Minimal Drift Orbits for Formation Flying Satellites. J. Guid. Control. Dyn. 2008, 31, 94–100. [Google Scholar] [CrossRef]
- He, Y.; Armellin, R.; Xu, M. Bounded Relative Orbits in the Zonal Problem via High-Order Poincaré Maps. J. Guid. Control. Dyn. 2018, 42, 91–109. [Google Scholar] [CrossRef]
- Ma, Y.; He, Y.; Xu, M.; Zhou, Q.; Chen, X. Invariant relative orbits for spacecraft formation flying in high-order gravitational field. Acta Astronaut. 2021, 189, 398–428. [Google Scholar] [CrossRef]
- Deprit, A.; Henrard, J. Canonical transformations depending on a small parameter. Celest. Mech. 1969, 1, 12–30. [Google Scholar] [CrossRef]
- Carletta, S.; Pontani, M.; Teofilatto, P. Design of low-energy capture trajectories in the elliptic restricted four-body problem. In Proceedings of the 70th International Astronautical Congress, Washington DC, USA, 21–25 October 2019. [Google Scholar]
- del Portillo, I.; Cameron, B.; Crawley, E. A technical comparison of three low earth orbit satellite constellation systems to provide global broadband. Acta Astronaut. 2019, 159, 123–135. [Google Scholar] [CrossRef]
- Schilling, K. Mission Analyses for Low-Earth-Observation Missions with Spacecraft Formations. RTO Educ. Notes Pap. 2011, 231. [Google Scholar]
- Knobelspiesse, K.; Nag, S. Remote sensing of aerosols with small satellites in formation flight. Atmos. Meas. Tech. 2018, 11, 3935–3954. [Google Scholar] [CrossRef] [Green Version]
- Martorella, M.; Giusti, E.; Gelli, S.; Tomei, S.; Atle-Onar, K.; Palmerini, G.; Teofilatto, P.; Nascetti, A.; Pisa, S.; Eriksen, T.; et al. Spaceborne SAR Cluster. In Proceedings of the AVT-336 Research Specialists’ Meeting on Enabling Platform Technologies for Resilient Small Satellite Constellation for NATO Missions, Virtual, Online, 11–14 October 2021. [Google Scholar]
- Ely, T.; Lieb, E. Constellations of Elliptical Inclined Lunar Orbits Providing Polar and Global Coverage. In Proceedings of the AAS/AIAA Astrodynamics Specialists Conference, Lake Tahoe, CA, USA, 7–11 August 2005. [Google Scholar]
- Leonardi, M. Geometrical comparison of different localization methods for lunar navigation exploiting ELFO and Halo orbits. In Proceedings of the 73rd International Astronautical Congress, Paris, France, 18–22 September 2022. [Google Scholar]
- Sirbu, G.; Leonardi, M.; Carosi, M.; Di Lauro, C.; Stallo, C. Performance evaluation of a lunar navigation system exploiting four satellites in ELFO orbits. In Proceedings of the 2022 IEEE 9th International Workshop on Metrology for AeroSpace, Pisa, Italy, 27–29 June 2022. [Google Scholar]
- Kozai, Y. Tesseral harmonics of the gravitational potential of the earth as derived from satellite motions. Astron. J. 1961, 66, 355–358. [Google Scholar] [CrossRef]
- Carletta, S.; Pontani, M.; Teofilatto, P. Characterization of Low-Energy Quasiperiodic Orbits in the Elliptic Restricted 4-Body Problem with Orbital Resonance. Aerospace 2022, 9, 175. [Google Scholar] [CrossRef]
- Siegel, C.; Moser, J. Lectures on Celestial Mechanics; Reprint of the 1971 Edition; Springer: Berlin, Germany, 1995. [Google Scholar] [CrossRef]
- Carletta, S.; Pontani, M.; Teofilatto, P. Station-keeping about Sun-Mars three-dimensional quasi-periodic Collinear Libration Point Trajectories. Adv. Astronaut. Sci. 2020, 173, 299–311. [Google Scholar]
- Standish, E.; Newhall, X.; Williams, J.; Folkner, W. JPL Planetary and Lunar Ephemerides; Willmann-Bell, Inc.: Richmond, VA, USA, 1997. [Google Scholar]
- Nerem, R.S.; Lerch, F.J.; Marshall, J.A.; Pavlis, E.C.; Putney, B.H.; Tapley, B.D.; Eanes, R.J.; Ries, J.C.; Schutz, B.E.; Shum, C.K.; et al. Gravity model development for TOPEX/POSEIDON: Joint Gravity Models 1 and 2. J. Geophys. Res. 1994, 99, 421–447. [Google Scholar] [CrossRef]
- Konopliv, A.; Asmar, S.; Carranza, E.; Sjogren, W.; Yuan, D. Recent Gravity Models as a Result of the Lunar Prospector Mission. Icarus 2001, 150, 1–18. [Google Scholar] [CrossRef]
- Kulik, J. An in-plane J2-invariance condition and control algorithm for highly elliptical satellite formations. Celest. Mech. Dyn. Astron. 2021, 133, 4. [Google Scholar] [CrossRef]
- Graziani, F.; Sparvieri, N.; Carletta, S. A low-cost earth-moon-mars mission using a microsatellite platform. In Proceedings of the 71st International Astronautical Congress, Virtual, Online, 12–14 October 2020. [Google Scholar]
- Thompson, J.; Hunter, G.; Keziram, M. Design and Analysis of Lunar Communication and Navigation Satellite Constellation Architectures. In Proceedings of the AIAA SPACE 2010 Cyberspace & Exposition, Anaheim, CA, USA, 30 August–2 September 2010; pp. 190–200. [Google Scholar] [CrossRef]
- Carletta, S. Design of fuel-saving lunar captures using finite thrust and gravity-braking. Acta Astronaut. 2021, 181, 190–200. [Google Scholar] [CrossRef]
Figure 1.
SSO formation: -invariant bounded trajectory (black) in ; the first orbit is plotted in red.
Figure 1.
SSO formation: -invariant bounded trajectory (black) in ; the first orbit is plotted in red.
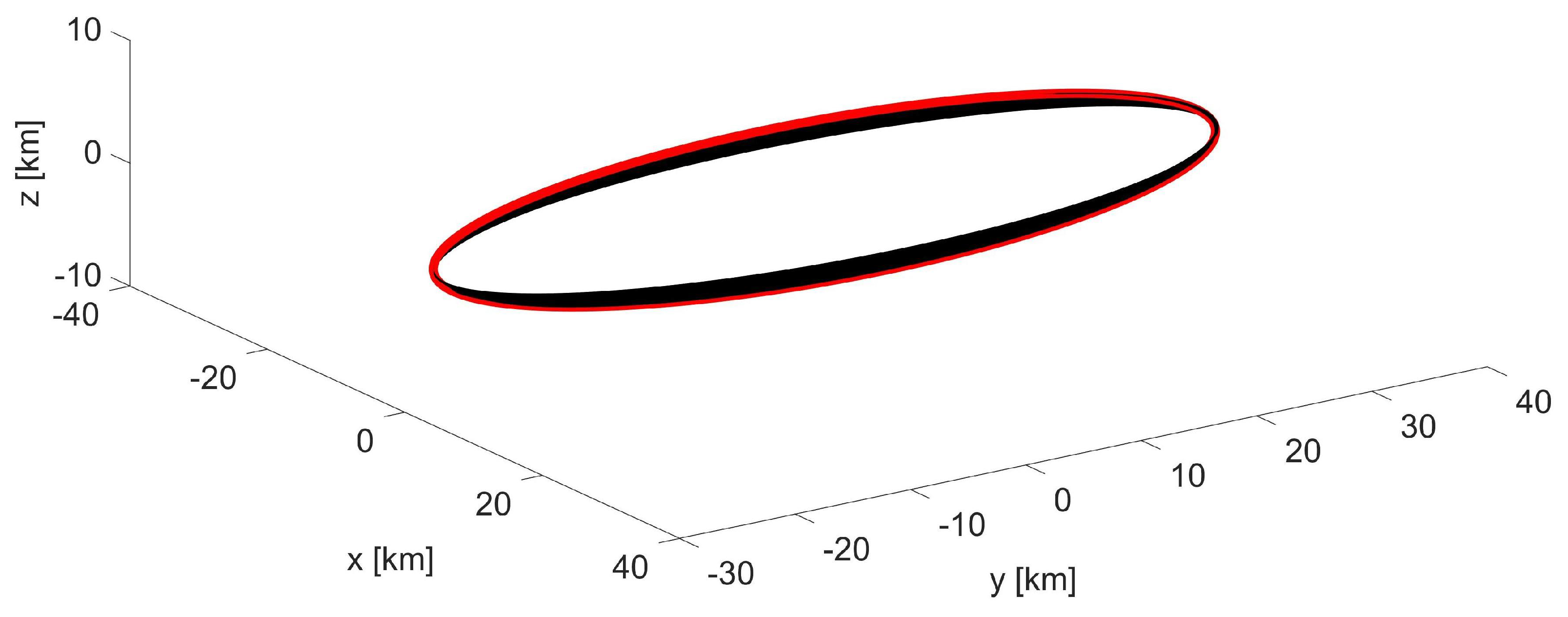
Figure 2.
SSO formation: trajectory (black) in resulting from non-invariant initial conditions; the first orbit is plotted in red.
Figure 2.
SSO formation: trajectory (black) in resulting from non-invariant initial conditions; the first orbit is plotted in red.

Figure 3.
SSO formation: time behavior of y component.

Figure 4.
SSO formation: time behavior of z component.

Figure 5.
Mid-inclination LEO formation: -invariant bounded trajectory (black) in ; the first orbit is plotted in red.
Figure 5.
Mid-inclination LEO formation: -invariant bounded trajectory (black) in ; the first orbit is plotted in red.

Figure 6.
Mid-inclination LEO formation: trajectory (black) in resulting from non-invariant initial conditions; the first orbit is plotted in red.
Figure 6.
Mid-inclination LEO formation: trajectory (black) in resulting from non-invariant initial conditions; the first orbit is plotted in red.

Figure 7.
Mid-inclination LEO formation: time behavior of y component.

Figure 8.
Mid-inclination LEO formation: time behavior of z component.

Figure 9.
Mid-inclination eccentric LEO formation: trajectory in resulting from -invariant and -invariant initial conditions; the first orbit is plotted in red.
Figure 9.
Mid-inclination eccentric LEO formation: trajectory in resulting from -invariant and -invariant initial conditions; the first orbit is plotted in red.

Figure 10.
Mid-inclination eccentric LEO formation: time behavior of y component for -invariant and -invariant initial conditions.
Figure 10.
Mid-inclination eccentric LEO formation: time behavior of y component for -invariant and -invariant initial conditions.

Figure 11.
Lunar formation: -invariant bounded trajectory (black) in ; the first orbit is plotted in red.
Figure 11.
Lunar formation: -invariant bounded trajectory (black) in ; the first orbit is plotted in red.
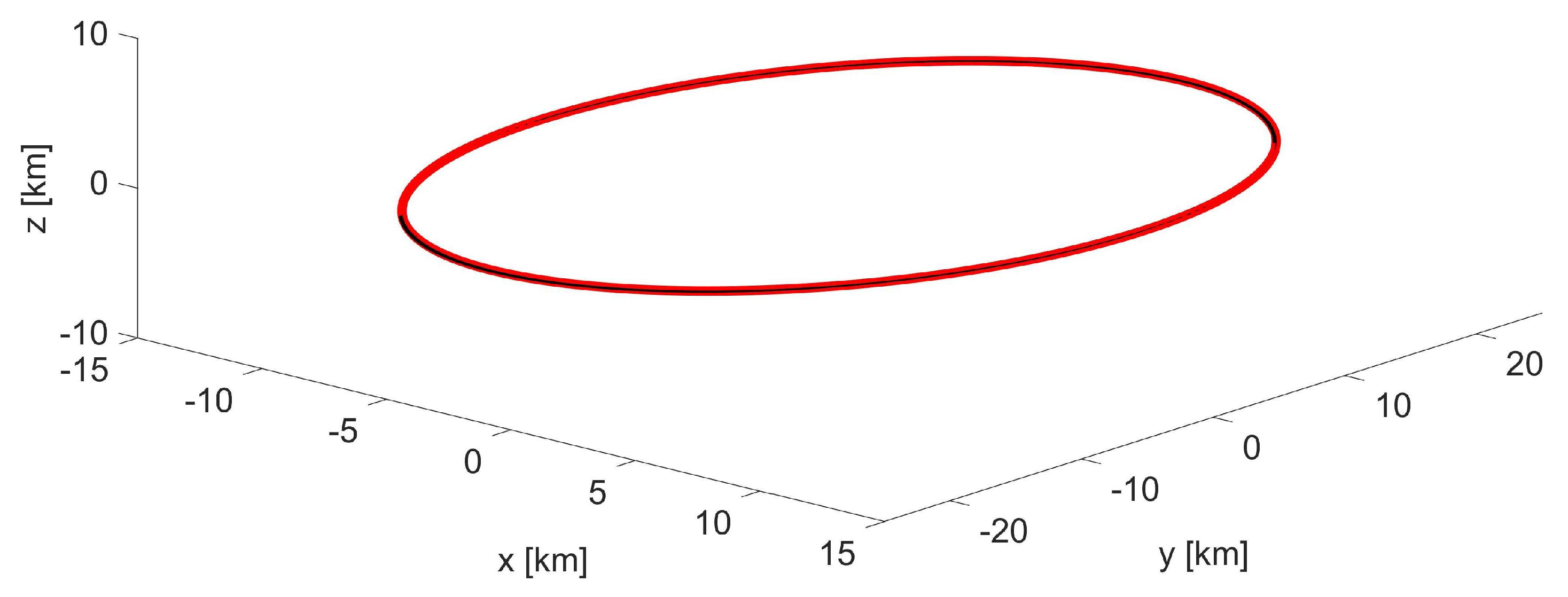
Figure 12.
Lunar formation: trajectory (black) in resulting from non-invariant initial conditions; the first orbit is plotted in red.
Figure 12.
Lunar formation: trajectory (black) in resulting from non-invariant initial conditions; the first orbit is plotted in red.

Figure 13.
Lunar formation: time behavior of y component.

Figure 14.
Guidance strategy: transfer of the reconnaissance satellite into a -invariant bounded trajectory in about the target object.
Figure 14.
Guidance strategy: transfer of the reconnaissance satellite into a -invariant bounded trajectory in about the target object.

Figure 15.
Guidance strategy: detail of the injection point between the departure trajectory and the target orbit in ; the arrow indicates the direction of the provided.
Figure 15.
Guidance strategy: detail of the injection point between the departure trajectory and the target orbit in ; the arrow indicates the direction of the provided.

Figure 16.
Guidance strategy: projection of the trajectory onto the plane; the amplitude of the z component does not change after the maneuver.
Figure 16.
Guidance strategy: projection of the trajectory onto the plane; the amplitude of the z component does not change after the maneuver.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
SSO formation: orbit parameters chief satellite.
| semimajor axis | 6919 km | |
| eccentricity | e | 0.002 |
| inclination | i | 97.79 deg |
| local time ascending node | - | 11:00 am |
| epoch (UTC) | - | 24 January 2023 12:00:00 |
Table 2.
SSO formation: initial state of deputy satellite.
| Hamiltonian Variables | Position/Velocity Components | ||
|---|---|---|---|
| 0 | x | 9.7806 km | |
| (1 + j) · | y | −19.5611 km | |
| (1 + j) · | z | −0.9781 km | |
| 0 | −14.2517 m/s | ||
| (−1 − j) · | −21.4989 m/s | ||
| (−1 − j) · | 0 m/s | ||
Table 3.
SSO formation: maximum and minimum value of the position coordinates for the first and the last orbit.
Table 3.
SSO formation: maximum and minimum value of the position coordinates for the first and the last orbit.
| First Orbit | Last Orbit | ||
|---|---|---|---|
| 16.2582 km | 16.2606 km | ||
| −16.2572 km | −16.2724 km | ||
| 38.8642 km | 38.9342 km | ||
| −26.1207 km | −26.0483 km | ||
| 0.9807 km | 0.9426 km | ||
| −0.9781 km | −0.9370 km | ||
Table 4.
Mid-inclination LEO formation: orbit parameters of chief satellite.
| semimajor axis | 6919 km | |
| eccentricity | e | 0 |
| inclination | i | 52 deg |
| RAAN | 0 deg | |
| epoch (UTC) | - | 24 January 2023 12:00:00 |
Table 5.
Mid-inclination LEO formation: initial state of deputy satellite.
| Hamiltonian Variables | Position/Velocity Components | ||
|---|---|---|---|
| 0 | x | 9.7849 km | |
| (1 + j) · | y | −19.5697 km | |
| (1 + j) · | z | −9.7849 km | |
| 0 | −7.5402 m/s | ||
| (−1 − j) · | −21.5257 m/s | ||
| (−1 − j) · | 0.2797 m/s | ||
Table 6.
Mid-inclination LEO formation: maximum and minimum value of the position coordinates for the first and the last orbit.
Table 6.
Mid-inclination LEO formation: maximum and minimum value of the position coordinates for the first and the last orbit.
| First Orbit | Last Orbit | ||
|---|---|---|---|
| 11.9577 km | 11.9611 km | ||
| −11.9724 km | −11.9790 km | ||
| 18.0742 km | 19.2724 km | ||
| −29.8000 km | −28.5862 km | ||
| 9.5223 km | 9.5223 km | ||
| −9.4888 km | −9.4888 km | ||
Table 7.
Mid-inclination eccentric LEO formation: orbit parameters of chief satellite.
| semimajor axis | 7153 km | |
| eccentricity | e | 0.05 |
| inclination | i | 48 deg |
| RAAN | 0 deg | |
| argument of pericenter | 30 deg | |
| epoch (UTC) | - | 24 January 2023 12:00:00 |
Table 8.
Mid-inclination eccentric LEO formation: -invariant initial state of deputy satellite.
| x | −0.7156 km |
| y | 0.2700 km |
| z | −0.3202 km |
| −0.0724 m/s | |
| 1.6135 m/s | |
| 0.3773 m/s |
Table 9.
Mid-inclination eccentric LEO formation: -invariant initial state of deputy satellite.
| Hamiltonian Variables | Position/Velocity Components | ||
|---|---|---|---|
| 0 | x | −0.7156 km | |
| (−1.069 + j0.072) · | y | 0.2700 km | |
| (−3.165 − j4.125) · | z | −0.3202 km | |
| 0 | −0.0724 m/s | ||
| (−0.072 + j1.069) · | 1.6142 m/s | ||
| (4.125 + j3.165) · | 0.4173 m/s | ||
Table 10.
Lunar formation: orbit parameters of chief satellite.
| semimajor axis | 6038 km | |
| eccentricity | e | 0 |
| inclination | i | 40 |
| RAAN | 0 | |
| epoch (UTC) | - | 24 January 2023 12:00:00 |
Table 11.
Lunar formation: initial state of deputy satellite.
| Hamiltonian Variables | Position/Velocity Components | ||
|---|---|---|---|
| 0 | x | 8.5390 km | |
| j · | y | −17.0780 km | |
| (1 + j) · | z | 0.8539 km | |
| 0 | −1.2744 m/s | ||
| −1 · | −2.5523 m/s | ||
| (−1 − j) · | −0.1274 m/s | ||
Table 12.
Lunar formation: maximum and minimum value of the position coordinates for the first and the last orbit.
Table 12.
Lunar formation: maximum and minimum value of the position coordinates for the first and the last orbit.
| First Orbit | Last Orbit | ||
|---|---|---|---|
| 12.0678 km | 12.0679 km | ||
| −12.0669 km | −12.0673 km | ||
| 24.0799 km | 24.0799 km | ||
| −24.1878 km | −24.4185 km | ||
| 1.2091 km | 1.2103 km | ||
| −1.2043 km | −1.2055 km | ||
Table 13.
Guidance strategy: orbit parameters of target object.
| semimajor axis | 6828 km | |
| eccentricity | e | 0 |
| inclination | i | 62 deg |
| RAAN | 0 deg | |
| true anomaly | 0 deg | |
| epoch (UTC) | - | 24 January 2023 12:00:00 |
Table 14.
Guidance strategy: orbit parameters of reconnaissance satellite.
| semimajor axis | 6835 km | |
| eccentricity | e | 0.033 |
| inclination | i | 62 deg |
| RAAN | deg | |
| argument of perigee | deg | |
| true anomaly | deg | |
| epoch (UTC) | - | 24 January 2023 12:00:00 |
Table 15.
Guidance strategy: initial state of reconnaissance satellite.
| Hamiltonian Variables | Position/Velocity Components | ||
|---|---|---|---|
| x | 9.6562 km | ||
| (0.11 − 2.04j) · | y | −19.3123 km | |
| (1 + j) · | z | 9.6563 km | |
| −3 · | −242.2476 m/s | ||
| (2.04 − 0.11j) · | −21.1209 m/s | ||
| (−1 − j) · | −1.2055 m/s | ||
Table 16.
Lunar formation: state of reconnaissance satellite after the maneuver.
| Hamiltonian Variables | Position/Velocity Components | ||
|---|---|---|---|
| 0 | x | 9.6562 km | |
| (1 + j) · | y | −19.3123 km | |
| (1 + j) · | z | 9.6563 km | |
| 0 | −10.8052 m/s | ||
| (−1 − j) · | −21.6630 m/s | ||
| (−1 − j) · | −1.2060 m/s | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Carletta, S. Dynamics and Control of Satellite Formations Invariant under the Zonal Harmonic Perturbation. Appl. Sci. 2023, 13, 4969. https://doi.org/10.3390/app13084969
AMA Style
Carletta S. Dynamics and Control of Satellite Formations Invariant under the Zonal Harmonic Perturbation. Applied Sciences. 2023; 13(8):4969. https://doi.org/10.3390/app13084969
Chicago/Turabian StyleCarletta, Stefano. 2023. "Dynamics and Control of Satellite Formations Invariant under the Zonal Harmonic Perturbation" Applied Sciences 13, no. 8: 4969. https://doi.org/10.3390/app13084969
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.